Спасательное устройство эвакуации из буровой платформы - RU2651236C1
Код документа: RU2651236C1
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройствам для аварийной эвакуации людей при возникновении пожарной опасности на буровых платформах, когда отсутствует энергопитание и доступ по воздуху сверху отрезан огнем, а специальные средства (раздвижные лестницы и коленчатые подъемники) не могут быть использованы из-за ограниченности своих возможностей.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известны способ эвакуации из буровой платформы и устройство его реализации, автор Барбашов Н.Н., Патент РФ №2615250 "Способ эвакуации из буровой платформы и устройство его реализации". Опубл. 04.04.2017. бюл. №10 [1].
Известное спасательное устройство [1] содержит спускаемый контейнер, который соединен с тросом, закрепленным на буровой платформе. Внутри контейнера трос намотан на цилиндрический барабан, который связан планетарным дифференциалом и зубчатой муфтой с маховиком. При спуске происходит кинематическое торможение контейнера при переходе его потенциальной энергии в кинетическую энергию маховика. При переключении зубчатой муфты после спуска кинетическая энергия маховика используется для вращения винта и удаления контейнера от буровой платформы. Передаточным механизмом рекуперации энергии в маховик является навитый на цилиндрический барабан трос, служащий одновременно грузонесущим элементом контейнера. Механизм рекуперации энергии в маховик в виде троса, навитого на цилиндрический барабан, имеет постоянное передаточное отношение, которое определяется диаметром цилиндрического барабана и передаточным отношением планетарного дифференциала.
Таким образом, известное спасательное устройство [1], включающее механизм рекуперации энергии торможения в виде соединенных между собой цилиндрического барабана с намотанной тросом и маховика, имеет значительные недостатки, состоящие в том, что передаточное отношение механизма рекуперации торможения имеет постоянное значение, не обеспечивающее полной рекуперации энергии торможения [2], но меняется скачком при управлении спуска зубчатой муфтой, вызывая скачки скорости контейнера при спуске. Невозможность обеспечения полной рекуперации энергии торможения приводит к увеличению скорости спуска контейнера в момент касания его с водой и резкого удара [2].
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Проведенный анализ возможности обеспечения полной рекуперации энергии торможения [2. 3] показывает, что располагаемая при спуске потенциальная энергия спасательного устройства mgHη идет на увеличение кинетической энергии контейнера и маховика

где m - масса спасательного устройства; g - ускорение силы тяжести; H - высота спуска; η - механический КПД, Jmax - момент инерции маховика; скорость спуска контейнера V и скорость вращения маховика ωмах связаны передаточным отношением u механизма рекуперации энергии

где V - скорость спуска контейнера;
Запасаемая маховиком энергия снижает запас кинетической энергии контейнера и тем самым уменьшает скорость спуска. Коэффициент рекуперации KE - доля энергии, запасаемой маховиком по отношению к общей располагаемой потенциальной энергии, является критерием качества экономичности спасательного устройства

На фиг. 1 представлена связь коэффициента рекуперации энергии KE с передаточным отношением u, которая показывает, что рост коэффициента рекуперации энергии KE и запаса кинетической энергии маховика связан с увеличением передаточного отношения u механизма рекуперации энергии. Представленные уравнения были использованы для расчета скорости контейнера в конце спуска

Анализ полученного уравнения показывает, что для снижения скорости спуска V и повышения экономичности спасательного устройства передаточное отношение u механизма рекуперации энергии следует увеличивать в конце спуска.
Целью предложенного спасательного устройства эвакуации из буровой платформы является устранение указанных недостатков известных устройств, возможность автоматизации спуска, безударный спуск людей в герметичном контейнере, повышение безопасности с одновременным сокращением времени эвакуации за счет автоматизации спуска за счет изменения передаточного отношения механизма рекуперации энергии торможения в процессе спуска по оптимальной зависимости, выявленной для подъемно-транспортных машин [2, 3].
Изменение передаточного отношения механизма рекуперации энергии торможения в процессе спуска происходит при применении конического барабана, на который наматывается трос. В процессе спуска контейнера меняется радиус контакта троса с коническим барабаном, оптимальный закон изменение передаточного отношения определяется углом наклона конуса к оси вращения барабана. Таким образом, к концу спуска контейнера передаточное отношение механизма рекуперации энергии торможения увеличивается, увеличивая запас энергии маховика по сравнению с процессом рекуперации энергии при постоянном передаточном отношении. Одновременно увеличение запаса энергии маховика приводит к снижению кинетической энергии контейнера и скорости его спуска.
Автоматизация устройства эвакуации из буровой платформы заключается в использовании тормозов планетарного дифференциала с двумя степенями свободы для изменения потоков энергии при спуске контейнера и при движении удаления от буровой платформы.
Сокращение времени спуска достигается тем, что барабан имеет коническую форму, в связи с чем при спуске плавно меняется передаточное отношение механизма рекуперации по оптимальному закону. При постоянном значении передаточной функции механизма рекуперации процесс перекачки энергии торможения в маховик замедляется по времени, чтобы обеспечить полную рекуперацию энергии торможения необходимо со временем увеличивать значение передаточной функции [2, 3]. В предлагаемом устройстве значение передаточной функции механизма рекуперации определяется радиусом точки контакта троса на коническом барабане. При конической форме барабана при опускании контейнера и сматывании троса диаметр намотки снижается, что приводит к росту значения передаточной функции механизма рекуперации. Для регулирования радиуса точки контакта троса на коническом барабане соединение троса и конического барабана дополнительно оснащено автоматическим устройством укладки троса в виде общеизвестного механизма винт-гайка [3], причем винт механизма укладки соединен с коническим барабаном при помощи цилиндрической зубчатой передачи с неподвижными осями, а через отверстие в гайке пропущен трос. Таким образом, при вращении барабана автоматически происходит смещение точки контакта троса по оси барабана и с изменением соответствующего радиуса контакта троса и конического барабана.
Известно спасательное устройство, включающее корпус контейнера с установленными в нем узлом крепления троса в виде цилиндрического барабана, движущий винт, входной и выходной валы, соединенные с барабаном и движущим витом, механизм управления в виде муфты, соединяющей попеременно входной и выходной валы с корпусом контейнера, который оснащен рычагом управления, имеющего три последовательных положения: посадки людей в контейнер, спуска контейнера по вертикали и горизонтального перемещения, механизм рекуперации энергии торможения в виде соединенных между собой барабана с намотанной тросом и маховика, а также мультипликатор, состоящий из зубчатых передач с неподвижными осями и планетарным дифференциалом, соединенных входным и выходным валами с маховиком и с механизмом управления и движущим винтом.
С целью повышения безопасности с одновременным сокращением времени эвакуации, предлагается спасательное устройство эвакуации из буровой платформы, отличающееся тем, что барабан имеет коническую форму, соединение троса и барабана дополнительно оснащено автоматическим устройством укладки троса в виде общеизвестного механизма винт-гайка, причем винт соединен с барабаном при помощи цилиндрической зубчатой передачи с неподвижными осями.
Общим признаком известного и предлагаемого устройств является то, что они имеют маховик, барабан, движущий винт и планетарный дифференциал.
Существенное отличие предлагаемого спасательного устройства от известного заключается в том, что барабан имеет не цилиндрическую, а коническую форму, обеспечивающую изменение передаточного отношения по оптимальному закону, не только снижающую время спуска, но исключающую перегрузку людей за счет более плавного изменения скорости спуска.
Спасательное устройство дополнительно отличается тем, что дополнительно оснащено двумя тормозами: выходного вала и барабана, а также дополнительно оснащено соединением троса и барабана с автоматическим устройством укладки троса в виде механизма винт-гайка, причем винт соединен с барабаном при помощи цилиндрической зубчатой передачи с неподвижными осями.
Предлагается:
1. Спасательное устройство эвакуации из буровой платформы, включающее корпус контейнера с установленными в нем узлом крепления троса в виде цилиндрического барабана, движущий винт, входной и выходной валы, соединенные с барабаном и движущим винтом, механизм управления в виде муфты, соединяющей попеременно входной и выходной валы с корпусом контейнера, который оснащен рычагом управления, имеющим три последовательных положения: посадки людей в контейнер, спуска контейнера по вертикали и горизонтального перемещения, механизм рекуперации энергии торможения в виде соединенных между собой барабана с намотанной тросом и маховика, а также мультипликатор, состоящий из зубчатых передач с неподвижными осями и планетарным дифференциалом, соединенных входным и выходным валами с маховиком и с механизмом управления и движущим винтом, отличающееся тем, что барабан имеет коническую форму, соединение троса и барабана дополнительно оснащено автоматическим устройством укладки троса в виде механизма винт-гайка, причем винт соединен с барабаном при помощи цилиндрической зубчатой передачи с неподвижными осями.
2. Спасательное устройство по п. 1, отличающееся тем, что дополнительно оснащено двумя тормозами: выходного вала и барабана.
Таким образом, существенное отличие предлагаемого устройства от аналога заключается в том, изменение и установление новых соединений уже известных элементов приводит к появлению новых свойств у предлагаемого устройства, связанных с автоматическим управлением рекуперации энергии вне зависимости от скорости вращения маховика и скорости спуска контейнера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
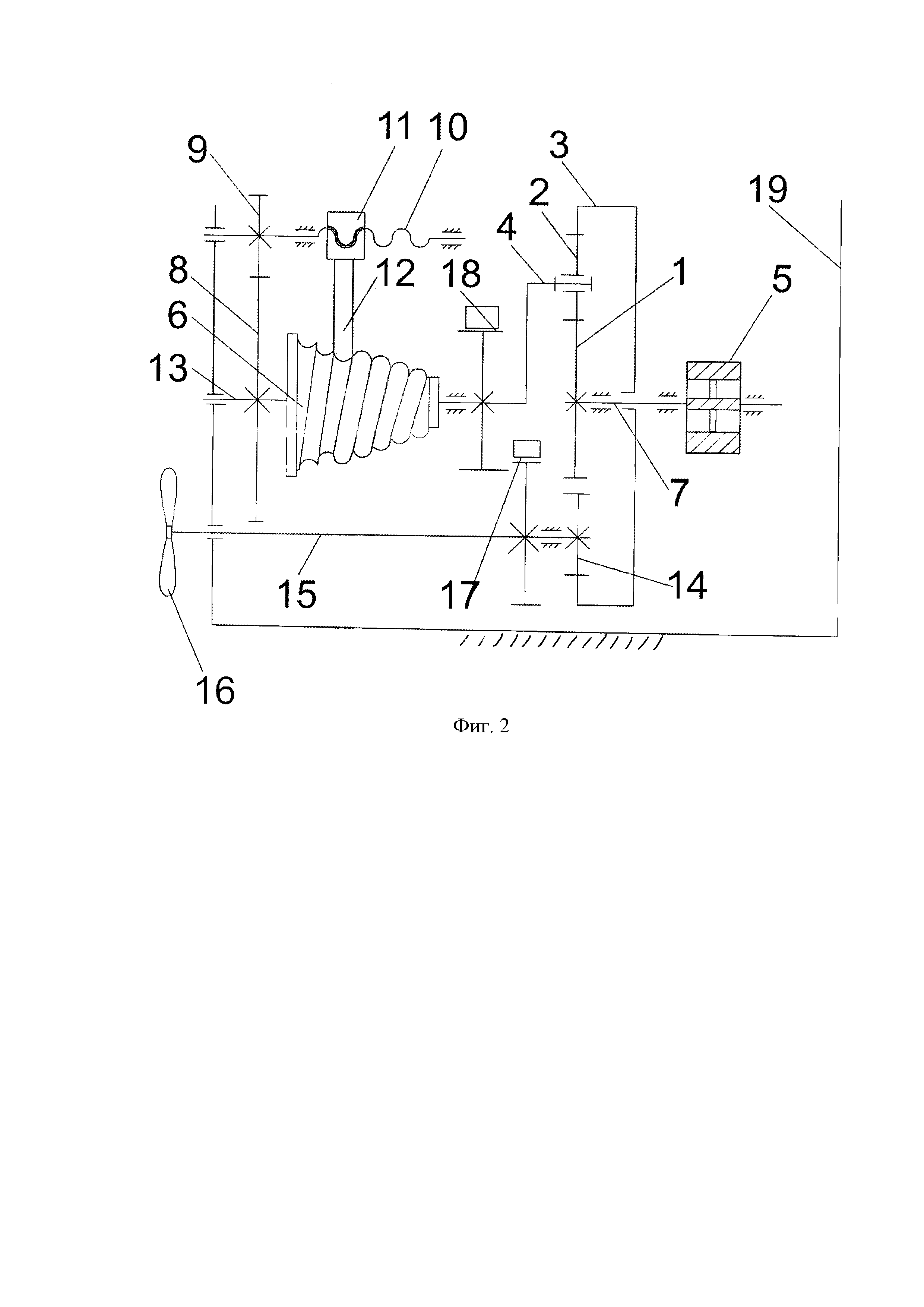
На фиг. 2 представлена кинематическая схема предлагаемого спасательного устройства эвакуации из буровой платформы: 1 - солнечная шестерня; 2 - сателлит; 3 - коронное колесо; 4 - водило; 5 - маховик; 6 - барабан; 7 - вал; 8 - зубчатое колесо; 9 - зубчатая шестерня, 10 - винт; 11 - гайка; 12 - трос; 14 - выходная шестерня; 15 - выходной вал; 16 - движущий винт; 17 - тормоз винта; 18 - тормоз барабана; 19 - корпус контейнера.
Механизм рекуперации энергии торможения имеет две степени свободы и представляет соединенные между собой планетарным дифференциалом маховик 5 и конический барабан 6 с намотанной тросом 12. Конструкция планетарного дифференциала общеизвестна [3], она включает водило 4 и зацепляющиеся между собой солнечную шестерню 1, сателлит 2, коронное колесо 3, размещенные в корпусе контейнера 19.
Барабан 6, размещенный в корпусе контейнера 19, имеет коническую форму, причем соединение троса 12 и конического барабана 6 дополнительно оснащено автоматическим устройством укладки троса в виде общеизвестного механизма винт-гайка [3]. Применение механизма винт-гайка обеспечивает при вращении барабана 6 изменение положения точки контакта троса 12 на коническом барабане и тем самым переход по мере вращения конического барабана на новый радиус точки контакта. Поэтому винт 10 соединен с коническим барабаном 6 при помощи цилиндрической зубчатой передачи с неподвижными осями, которая образована зубчатой шестерней 9 и зубчатым колесом 8, соединенным с винтом 10. Гайка 11 механизма винт-гайка опирается на корпус контейнера 19, обеспечивая при вращении барабана перемещение троса, который проходит через отверстие в ней. Зубчатая шестерня 9 расположена на входном валу 13, который соединен с барабаном 6. С другой стороны конический барабан 6 жестко соединен с водилом 4, между ними располагается тормоз барабана 18. Солнечная шестерня 1 планетарного дифференциала соединена валом 7 с маховиком 5. Коронное колесо 3 планетарного дифференциала зацепляется с одной стороны с сателлитом, а с другой стороны с выходной шестерней 14, расположенной на выходном валу 15, на котором расположены также движущий винт 16 и тормоз винта 17.
Работа спасательного устройства
Работа спасательного устройства происходит следующим образом. В начальном положении контейнер 19 удерживается тормозами 17, 18 в неподвижном состоянии для посадки людей. Удерживание контейнера 19 в неподвижном состоянии при посадке людей обеспечивается тем, что оба тормоза 17 и 18 затормаживают соответствующие валы и обеспечивают их неподвижность. После завершения посадки людей в контейнер 19 управлением изнутри растормаживается тормоз 18 и начинается спуск контейнера 19 с разматыванием троса 12 с конического барабана 6.
Вращение конического барабана передается водилу 4 планетарного дифференциала, на котором расположен с возможностью вращения сателлит 2, зацепляющийся с коронным колесом 3 и солнечной шестерней 1. Поскольку коронное колесо 3 остается заторможенным тормозом 17, то солнечная шестерня 1 вращается с более высокой скоростью, чем конический барабан 6. Вращение солнечной шестерни 1 передается валом 7 маховику, который запасает таким образом энергию торможения при спуске контейнера 19.
Процесс рекуперации энергии в маховик интенсифицируется [2, 3] увеличением передаточного отношения механизма рекуперации путем перехода точки контакта троса 12 на меньший радиус намотки на коническом барабане 6, осуществлением перемещения гайки 11 механизма винт-гайка, соединенного соединенным с винтом 10 и с барабаном 6 при помощи цилиндрической зубчатой передачи с неподвижными осями, которая образована зубчатой шестерней 9 и зубчатым колесом 8, связанным с коническим барабаном 6.
После опускания контейнера в воду и схода троса 12 с барабана 6 растормаживается тормоз 17, удерживающий вал 15 и движущий винт 16 в неподвижном состоянии. Затормаживается тормоз 18, водило 4 становится неподвижным и планетарный дифференциал теряет одну из двух степеней свободы, становясь редуктором [3]. Вращение маховика 5 передается валом 7 солнечной шестерне 1 и через сателлит 2 коронному колесу 3, которое передает вращение выходной шестерне 14 и выходному валу 15 с движущим винтом 16. Таким образом запасенная при спуске контейнера энергия в маховике используется для движения и удаления контейнера от буровой платформы.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Заявляемое спасательное устройство из буровой платформы позволяет повысить безопасность аварийно спасательных работ на морских буровых платформах тем, что спасательное устройство не требует обслуживания и энергообеспечения при его нахождении на буровой платформе и тем самым всегда находится в состоянии, готовом к его аварийному спуску. Повышение безопасности обеспечивается наличием управляющих и энергозапасающих устройств внутри спасательного контейнера.
Литература
1. Барбашов Н.Н. Патент РФ на изобретение №2615250 "Способ эвакуации из буровой платформы и устройство его реализации" Опубл. 04.04.2017, бюл. №10.
2. Н.Н. Барбашов, И.В. Леонов. Улучшение энергетических характеристик привода маховичных аккумуляторов подъемно-транспортных машин. Известия ВУЗов. «Машиностроение». Специальный выпуск «Фундаментальные проблемы создания и поддержки высокотехнологичных производств» 2012 г., с. 57-64.
3. Леонов И.В., Леонов Д.И.. Теория механизмов и машин. Учебн. пособие для втузов. - М.: Высшее образование, 2014. - 239 с.
Подрисуночные подписи
фиг. 1 Связь коэффициента рекуперации энергии KE с передаточным отношением u
Фиг. 2 Кинематическая схема механизмов спасательного устройства: 1 - солнечная шестерня; 2 - сателлит; 3 - коронное колесо; 4 - водило; 5 - маховик;; 6 - барабан; 7 - вал (маховика); 8 - зубчатое колесо; 9 - зубчатая шестерня; 10 - винт; 11 - гайка; 12 - трос; 13 - входной вал; 14 - выходная шестерня; 15 - выходной вал; 16 - движущий винт; 17 - тормоз винта; 18 - тормоз барабана; 19 - корпус контейнера.
Реферат
Спасательное устройство эвакуации c буровой платформы включает корпус контейнера с установленными в нем узлом крепления троса в виде барабана, движущий винт, входной и выходной валы, соединенные с барабаном и движущим винтом, механизм управления в виде муфты, соединяющей попеременно входной и выходной валы с корпусом контейнера, который оснащен рычагом управления, имеющим три последовательных положения: посадки людей в контейнер, спуска контейнера по вертикали и горизонтального перемещения, механизм рекуперации энергии торможения в виде соединенных между собой барабана с намотанным тросом и маховика, а также мультипликатор, состоящий из зубчатых передач с неподвижными осями и планетарным дифференциалом, соединенных входным и выходным валами с маховиком и с механизмом управления и движущим винтом. Согласно изобретению барабан имеет коническую форму, соединение троса и барабана дополнительно оснащено автоматическим устройством укладки троса в виде механизма винт-гайка, причем винт соединен с барабаном при помощи цилиндрической зубчатой передачи с неподвижными осями. Спасательное устройство позволяет рекуперировать часть энергии торможения контейнера в маховичном аккумуляторе энергии, находящемся внутри спасательного устройства. Это позволяет использовать накопленную энергию на другие цели, например, для горизонтального перемещения контейнера спасательного устройства и удаления его от места пожара на буровых платформах. 1 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ эвакуации из буровой платформы и устройство его реализации
Спусковое устройство спасательной шлюпки персонала морского нефтегазового сооружения для ледовых условий
Комментарии