Устройство для циклического погружения и всплытия морского буя - RU2733550C1
Код документа: RU2733550C1
Чертежи


Описание
Изобретение относится к морской технике и может быть использовано в станциях для проведения комплексных наблюдений за динамикой водной среды, ее химико-биологического контроля.
Изобретение относится к способам устройства буя для циклического всплытия и погружения в условиях морской воды на различные глубины, рассчитанное на несколько циклов в автономном режиме.
Технический результат от использования изобретения заключается в обеспечении возможности зондировать водную среду практически на любую глубину и упрощает конструкцию системы с обеспечением ее живучести.
Наиболее близкими к данному изобретению является патент РФ 2406640, приоритет 16.04.2019 г. МПК В63В 22/06. Устройство по данному патенту является наиболее близким к заявленному, принимается за прототип и представляет циклическую автономную гидрофизическую станцию вертикального профилирования содержит измерительный модуль, донную лебедку, донный блок и пассивный измерительный модуль. Измерительный модуль и пассивный измерительный модуль имеют положительную плавучесть. Измерительный модуль соединен при помощи троса с пассивным измерительным модулем, причем трос проходит через обводной барабан лебедки и донный блок. Измерительный модуль включает в себя управляющий процессор, измерительные датчики, УКВ или спутниковый радиомодем, гидроакустическую систему связи с лебедкой. Достигается возможность одновременного проведения измерений на разных глубинах, а также уменьшение энергозатрат на перемещение измерительного модуля в слоях водной среды.
Недостатком цитируемого патента является наличие лебедки, барабана, донного блока и необходимых при этом тросов, а в некоторых случаях наличие внешних емкостей, которые осуществляют всплытие и погружение как на подводных лодках.
Технический результат предлагаемой конструкции буя - это устранение вышеуказанных недостатков и получение, положительной и отрицательной циклической плавучести морского буя, которая обеспечивается за счет электролиза морской воды, а перемещение по поверхности воды после всплытия осуществляется за счет использования энергии при сжигании кислорода и водорода после всплытия на поверхность водоема.
Устройство заявленного буя иллюстрируется на фигурах:
Фиг. 1 - принципиальная схема действия устройства при опускании буя;
Фиг. 2 - принципиальная схема действия устройства при подъеме буя;
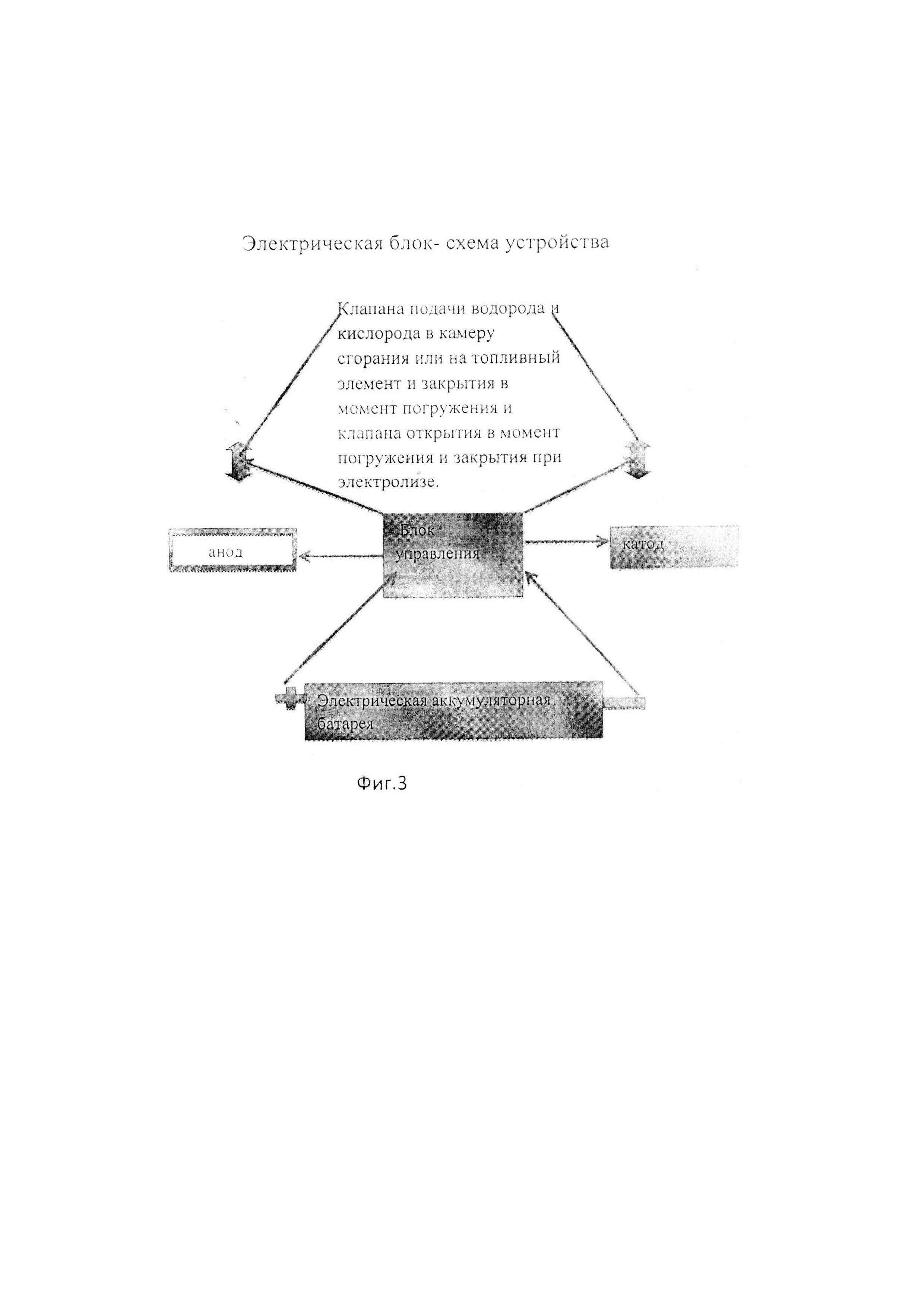
Фиг. 3 - электрическая блок-схема.
Предлагаемая конструкция представляет собой устройство для циклического погружения и всплытия морского буя, содержащее две балластные емкости 1 и 2, источник электропитания - аккумуляторную батарею 3, блок управления и измерения 4. Две балластные емкости 1 и 2, вставленные одна в другую, представляют собой электролизные ячейки, использующие в качестве электролита морскую воду, и имеющие связь через окна 5 в нижней части внутренней емкости напротив катода и анода, внутренняя емкость выполнена цилиндрической формы, в донной части которой находится электрическая аккумуляторная батарея 3 с блоком управления 4, а над ней катод 6 в виде цилиндрического диска, соединенным с минусом аккумуляторной батареи, кольцевая емкость 1, в которую вставлена внутренняя цилиндрическая емкость 2 имеет в нижней части кольцевой анод 7, связанный с плюсом аккумуляторной батареи 3, в верхней части каждой емкости находятся регулируемые от блока управления клапана сброса и закрытия 8 и 9, а в нижней части каждой емкости постоянно открытые отверстия 10 для заполнения и сбрасывания электролита - морской воды.
В предлагаемой нами конструкции буя предусмотрено использование водорода и кислорода в качестве горючего для перемещения морского буя по поверхности воды. Через электромагнитные клапана 8 подается кислород и водород в камеру сгорания водорода и кислорода 11 с соплом Лаваля 12, истечение из которого продуктов сгорания водорода и кислорода, т.е. паров воды, создает реактивную тягу, обеспечивающую перемещение по поверхности водоема в заданном направлении при помощи поворотного механизма 13.
При погружении в воду в начале работы буй обладает небольшой положительной плавучестью так, чтобы на поверхности была видна лишь небольшая верхняя часть буя. По команде от датчика давления закрываются клапана 8 и открываются клапана 9 и все полости буя заполняются морской водой, буй теряет положительную плавучесть и погружается на нужную глубину, которую отслеживает датчик давления по глубине 14.
Клапаны 9 закрываются, а нижние отверстия 10 всегда остаются открытыми. Нижние отверстия конструктивно располагаются ниже катода и анода. По датчику давления 14 закрываются верхние электромагнитные клапаны 8, с аккумуляторной батареи одновременно подается ток на электроды, после чего начинает выделяться водород и кислород, которые вытесняют непрореагировавшую морскую воду через нижние отверстия сброса 10 в окружающую среду. Верхние клапана 8 и 9 в этот момент закрыты. Вытеснение воды из полостей буя происходит вследствие скапливания в верхней части полостей 1 и 2 кислорода и водорода, которые своим давлением немного превосходящим давление окружающей среды выдавливают воду через нижние отверстия 10, после чего буй приобретает положительную плавучесть и поднимается к поверхности.
В результате электролиза в основном выделяется водород и кислород, которые вытесняют морскую воду из автономных балластных емкостей после погружения на заданную глубину, которую отслеживает датчик 14 глубины, расположенный в блоке управления 6. На заданной глубине клапана заполнения емкостей 1 по команде от блока управления 6 закрываются и одновременно от того же блока управления подается сигнал на подачу тока от аккумуляторной батареи 3 на анод 7 и катод 6. После чего начинается электролиз морской воды и обе полости заполняются соответствующими газами, которые вытесняют непрореагированную воду через нижние отверстия сброса 10. При этом возникает положительная плавучесть буя и он всплывает на поверхность. Далее опять по команде с блока управления 4 открываются запитывающие клапана водорода и кислорода 8, и водород, и кислород из балластных емкостей 1 и 2 поступает или в камеру сгорания 11, для осуществления реактивной тяги через сопло Лаваля 12. Во время движения по поверхности воды в заданном направлении при помощи поворотного механизма 13 и по команде блока управления 4 до срабатывания водорода и кислорода морской буй перемещается в новую точку погружения.
После срабатывания водорода и кислорода в качестве топлива для горизонтального перемещения буя электроклапана 8 закрываются и емкости 1 и 2 заполняются водой через отверстия 9 и открытые по команде блока управления клапана, возникает отрицательная плавучесть и буй погружается на заданную глубину по датчику глубины, который расположен в блоке управления 6.
Блок управления может работать автономно, т.е. датчик глубины показывает наружное давление 1 атм, и от него идет импульс на открытие электроклапанов 8, т.е. на выпуск газов из полостей в камеру сгорания 10. При этом клапана 9 закрыты. После опорожнения от водорода и кислорода емкостей 1 и 2 клапана 8 закрываются и открываются клапана 9 на заполнение полостей буя водой, после чего он идет на погружение до заданной глубины по датчику давления. При достижении заданной глубины датчик давления дает команду на закрытие клапанов 9 и на подачу тока на процесс электролиза, т.е. на выработку водорода и кислорода.
Блок управления так же может быть запрограммирован и с помощью реле времени и команды на открытие или закрытия клапанов и включения процесса электролиза могут осуществляться через запрограммированное реле времени.
Блок управления может так же работать по командам с надводного или подводного командного пункта.
Реферат
Изобретение относится к морской технике и может быть использовано в станциях для проведения комплексных наблюдений за динамикой водной среды, ее химико-биологического контроля. Циклическое погружение и всплытие осуществляется за счет электролиза морской воды с получением в раздельных емкостях водорода и кислорода, осуществляющих всплытие, и последующего выпуска водорода и кислорода в камеру сгорания их и истечением продуктов сгорания через сопло Лаваля, дающего реактивную тягу для горизонтального перемещения. Камера сгорания с соплом Лаваля установлена на поворотном механизме для осуществления движения в любом заданном направлении, что осуществляется блоком управления. После выработки водорода и кислорода происходит по команде блока управления заполнение емкостей морской водой и погружение на заданную глубину по датчику давления. Далее по команде включается процесс электролиза и снова происходит заполнение балластных емкостей водородом и кислородом для всплытия. Процесс повторяется многократно, пока не выработается аккумуляторная батарея. Обеспечивается возможность зондировать водную среду на любую глубину. 2 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ получения воды из воздуха
Комментарии