Катамаранное судно - RU2683048C2
Код документа: RU2683048C2
Чертежи






Описание
Настоящее изобретение относится к типу катамаранного судна, изложенному в ограничительной части п. 1 формулы изобретения.
В настоящее время каждое средство водного транспорта проектируется и строится с конкретной целью - перевозить определенное максимальное число людей и, следовательно, с определенным весом и/или максимальным объемом груза.
Для любого бизнеса максимизация прибыли приводит к оптимизации ресурсов и использованию указанных средств.
По этой причине те, кто развивают бизнес в водной транспортировке вещей/людей, должны точно знать плотность потока, транспортируемого в ходе их работ.
Эту оценку не всегда легко реализовать.
В действительности может случиться так, что возникает необходимость увеличения грузоподъемности средств водного транспорта. Это может произойти также внезапно и/или за переменное время, которое нельзя оценить априори. И наоборот, может случиться так, что в некоторые периоды года спрос настолько ограничен, что средства для водного транспорта абсолютно не приспособлены для миссии, с неизбежным увеличением эксплуатационных расходов и технического обслуживания.
Переменная грузоподъемность может быть действительно важной, особенно в некоторые периоды года. Рассмотрим, например, пассажирские транспортные операции, близкие к праздничным периодам в туристических зонах: в этом случае увеличение грузоподъемности ограничено несколькими днями. В качестве альтернативы, в случае транспорта для коммерческих целей продуктов, увеличение нагрузки может быть привязано к сезонному характеру таких продуктов или влиять на временные окна амплитуды неопределенными и непредсказуемыми.
К сожалению, традиционные суда не дают такой универсальности, с неизбежным увеличением эксплуатационных расходов. В некоторых случаях неудовлетворение некоторых запросов вызывает недовольство клиентов, экономический и репутационный ущерб.
Другая проблема для судов состоит в том, что, даже имея возможность передвигаться по маршрутам, в частности узким (например, в реке, канале, порту и т.д.), они очень сложны и трудны в обращении.
В частности, эта проблема может быть особенно очевидна в случае судов, которые, будучи рассчитанными на значительную грузоподъемность, имеют большой общий размер и, следовательно, требуют многочисленных и сложных маневров для преодоления препятствия или изгиба.
В этой ситуации техническая задача, лежащая в основе настоящего изобретения, заключается в создании катамаранного судна, способного существенно избежать упомянутые недостатки.
В объеме этой технической задачи, важной целью изобретения является создание модульного катамаранного судна с определенной грузоподъемной гибкостью, изменяющегося, чтобы удовлетворить любые условия перевозки.
Другой важной целью изобретения является реализация прочного, жесткого катамаранного судна, грузоподъемность которого легко изменяется и в условиях максимальной безопасности для операторов.
Также целью изобретения является создание катамаранного судна экономичного в производстве и, кроме того, характеризующегося высокой простотой маневрирования.
Указанная техническая задача и цели достигаются катамаранными судами, заявленными в прилагаемом п. 1 формулы изобретения.
В частности задачи достигаются с помощью катамаранного судна, отличающегося тем, что оно содержит по меньшей мере одно катамаранное судно, определяющее носовую часть, кормовую часть и содержащее:
- два боковых корпуса, каждый из которых определяет срединную ось;
- несущую конструкцию, называемую мостом, соединяющую и, в частности, протянутую между боковыми корпусами и определяющую опорную поверхность;
- дополнительную конструкцию, связанную с мостом наверху, определяющую надстройку и состоящую из боковых стенок и потолка;
- моторные средства, приспособленные для создания осевой силы катамаранного судна и выборочно расположены на носовой части или на кормовой части;
- направляющие средства, приспособленные для определения, соответственно, вместе с моторными средствами, направления движения катамаранного судна и размещенные на противоположной стороне от моторных средств и, следовательно, на кормовой части или на носовой части;
- упомянутые моторные и направляющие средства расположены между боковыми корпусами.
Согласно первым аспектам изобретения:
- упомянутые моторные средства содержат азимутальное подруливающее устройство,
- упомянутые направляющие средства содержат перо руля,
- причем упомянутое моторные средства и упомянутые направляющие средства предусмотрены вдоль упомянутых срединных осей.
В соответствии с возможным вариантом осуществления изобретения азимутальное подруливающее устройство катамаранного судна вращается вокруг направляющей оси, по существу, перпендикулярной опорной поверхности.
Согласно другому возможному варианту осуществления изобретения перо руля катамаранного судна вращается вокруг направляющей оси, по существу, перпендикулярной опорной поверхности.
В соответствии с еще одним возможным вариантом осуществления изобретения вращение азимутального подруливающего устройства регулируется зависимо или, предпочтительно, независимо от вращения пера руля.
Более подробно, цели достигаются с помощью катамаранного судна, отличающегося тем, что оно содержит:
- первое катамаранное судно, которое работает независимо, имеющее основное направление продольного расширения вдоль срединной оси, и содержащее носовую часть, кормовую часть, моторные средства и направляющие средства;
- второе катамаранное судно, которое работает независимо, имеющее основное направление продольного расширения вдоль срединной оси, и содержащее носовую часть, кормовую часть, моторные средства и направляющие средства,
- причем оба, первое катамаранное судно и второе катамаранное судно содержат соединительные средства для их взаимного устойчивого соединения, полученного соединением вместе их кормовых частей, в поперечной плоскости стыка, для реализации упомянутого катамаранного судна, приспособленного для работы как единое целое.
Согласно первым аспектам изобретения:
- оба первое катамаранное судно и второе катамаранное судно, определяют носовую часть, кормовую часть и содержат:
- два боковых корпуса; и
- несущую конструкцию, соединяющую и, в частности, протянутую между боковыми корпусами и определяющую опорную поверхность для вещей и/или людей, перевозимых катамаранным судном; и
- дополнительную конструкцию, связанную с мостом наверху, определяющую надстройку и состоящую из боковых стенок и потолка;
- моторные средства, предпочтительно содержащие азимутальное подруливающее устройство, установленное в соответствующей носовой части каждого катамаранного судна;
- направляющие средства, предпочтительно содержащие перо руля, установленное на противоположной стороне от моторных средств и, в частности, в соответствующей кормовой части каждого катамаранного судна,
- причем упомянутые моторные средства и упомянутые направляющие средства расположены между корпусами и, в частности, вдоль упомянутых срединных осей.
Преимущественно упомянутое первое катамаранное судно и упомянутое второе катамаранное судно являются идентичными, и корпус, являющийся результатом их соединения, является по существу симметричным относительно упомянутой поперечной плоскости стыка.
Согласно еще одному аспекту изобретения, упомянутые соединительные средства содержат:
- средства выравнивания, приспособленные для обеспечения коаксиальности первого и второго катамаранных судов;
- соединительные средства для упомянутых первого и второго катамаранных судов;
- средства крепления, приспособленные для обеспечения устойчивости и жесткости соединения первого и второго судов.
В деталях:
- упомянутые средства выравнивания содержат средства соединения формы, предусмотренные на упомянутых кормовых частях;
- упомянутые соединительные средства работают вдоль основного направления продольного расширения упомянутого первого судна и упомянутого второго судна и содержат подвижный крюк, предусмотренный на каждом судне, приспособленный для взаимодействия с соответствующим удерживающим элементом, предусмотренным на противоположном судне; и упомянутый подвижный крюк содержит гидравлический или электрический линейный привод, способный оказывать тяговое усилие для объединения упомянутого первого и упомянутого второго катамаранного судна.
Кроме того, упомянутые средства крепления содержат:
- панель, шарнирно связанную с каждым катамаранным судном и приспособленную для поворота, чтобы быть устойчиво закрепленной на противоположном катамаранном судне;
- крюковой захват, предусмотренный на панели покрытия каждого катамаранного судна и приспособленный для зацепления соответствующего удерживающего элемента, образованного соединением упомянутого первого и упомянутого второго катамаранных судов.
Согласно возможному варианту осуществления изобретения азимутальные подруливающие устройства упомянутого первого и второго катамаранных судов вращаются независимо на соответствующих осях, чтобы обеспечить управление упомянутым катамаранным судном, являющимся результатом объединения катамаранных судов.
Согласно изобретению основное преимущество катамаранного судна заключается в его модульности и гибкости.
Катамаранное судно с модульной архитектурой, такое как рассматриваемое, может решать различные потребности, связанные с ежедневно или сезонно изменяемой грузоподъемностью, сокращать расходы, связанные с персоналом на борту, топливом и стоянкой в доке.
Каждое катамаранное судно, по сути, обеспечивает собой определенную грузоподъемность, которая, однако, может быть удвоена, если они сформируют, однажды собранное, единое транспортное средство, то есть одно катамаранное судно.
Это определяет условия для эксплуатационной гибкости, которая позволяет, в условиях низкого трафика, использовать отдельно два катамаранных судна, например, изменяя режим работы каждого судна, назначая обоим катамаранным судам разные задачи на разных маршрутах, или просто закрывая одно судно в ожидании нового увеличения трафика, при этом экономия затрат связана с износом от напряжения.
Наоборот, в условиях интенсивного трафика можно увеличить и, в частности, удвоить пропускную способность совмещением двух катамаранных судов с минимальной нагрузкой в отношении задействованного экипажа и затрат на управление катамаранным судном.
Важным преимуществом является тот факт, что катамаранное судно благодаря инновационному расположению моторных и направляющих средств, обеспечивает высокую маневренность катамаранного судна.
Фактически, их расположение между корпусами обеспечивает в каждом случае наличие оптимального потока, влияющего на моторные и направляющие средства и, следовательно, на их оптимальную работу.
Кроме того, возможность использования, в дополнение к перу руля, азимутального подруливающего устройства для создания крутящего момента, вращающего катамаранное судно и/или катамаранной лодки, позволяет значительно уменьшить пространства маневра самого катамаранного судна.
Другим важным аспектом является хранение катамаранного судна для операций по внеплановому техническому обслуживанию. Операция, выполняемая в два этапа, отдельно для двух катамаранных судов, дает два преимущества: с одной стороны, это уменьшает стоимость подъема и размещения на месте, за счет перемещения меньшей нагрузки, с уменьшением используемого подъемного оборудования и меньшим занятым пространством, с другой стороны, это позволяет не полностью останавливать деятельность по причине использования катамаранного судна.
Соединение двух катамаранных судов задает геометрические характеристики, присваиваемые соответствующим кормовым зонам, для которых чрезвычайно выгодно использовать катамаранные суда с корпусом катамаранного типа.
Корпус катамарана, по сути, позволяет устанавливать рулевые органы, удобно расположенные в кормовой зоне, и, если они расположены между боковыми корпусами и, в частности, на оси симметрии катамаранного судна, они особенно эффективны. В традиционных корпусах вместо этого происходит то, что маневровые органы в большинстве случаев выступают из кормового конца наружу, тем самым препятствуя возможной комбинации кормовых частей двух катамаранных судов.
Использование корпусов катамаранов также обеспечивает более эффективное соединение и конструктивно более устойчивое закрепление.
Два независимых катамаранных судна взаимно идентичны. Эта характеристика необходима для операции правильного позиционирования их между собой в момент взаимного сближения, даже в случае минимального перемещения, а затем обеспечения, благодаря конструктивной симметрии и полученному равному распределению весов, оптимального, устойчивого и жесткого закрепления.
Кроме того, использование двух идентичных катамаранных судов позволяет, после сборки, назначить одну или другую основные функции управления катамаранному судну с более удобной маневренностью. Фактически капитан может выбрать командный пункт из двух существующих и эквивалентных, просто основываясь на специфике миссии, и из упомянутого контрольного пункта он может получить доступ ко всем системам на борту.
Тот факт, что два катамаранных судна идентичны, чрезвычайно выгоден также для судового производства, в основном по двум аспектам: с одной стороны, массовое производство всегда одного и того же катамаранного судна значительно снижает затраты, связанные с производственным процессом; с другой стороны, можно удовлетворить самые разные требования в отношении объема перевозимого груза, сокращая время, пространство и стоимость работы.
Преимущественно, вышеизложенное изменение вместимости транспорта по людям и/или вещам может быть увеличено за счет реализации катамаранного судна, добавлением к катамаранным судам одного или нескольких промежуточных катамаранных судов, которые могут постоянно быть соединены между катамаранными судами и/или добавлением по меньшей мере одного дополнительного катамаранного судна, способного прикрепляться к кормовой части катамаранного судна.
Размещение и форма соединительных средств чрезвычайно благоприятны для конструктивной жесткости собранного катамаранного судна, как будет показано в нижеследующем описании.
Предпочтительные варианты осуществления выделены в зависимых пунктах.
Характеристики и преимущества изобретения будут объяснены ниже детальным описанием одного или более предпочтительных вариантов осуществления изобретения со ссылками на сопутствующие чертежи, на которых:
Фиг. 1 изображает в аксонометрической проекции катамаранное судно в соответствии с изобретением;
Фиг. 2a показывает компонент катамаранного судна по фиг. 1;
Фиг. 2b показывает части различных компонент катамаранного судна, показанного на фиг. 1;
Фиг. 3a показывает различные виды компонента по фиг. 2a;
Фиг. 3b показывает различные виды компонента по фиг. 2b;
Фиг. 4 представляет другой вид в аксонометрической проекции компонента по фиг. 3b;
Фиг. 5 является видом сбоку компонента по фиг. 3b;
Фиг. 6 показывает в аксонометрической проекции катамаранное судно по фиг. 1 на этапах сборки;
Фиг. 7 показывает компоненты по фиг. 2a и 2b одновременно.
Фиг. 8 является сборкой катамаранного судна;
Фиг. 9 показывает предварительную сборку по фиг. 8;
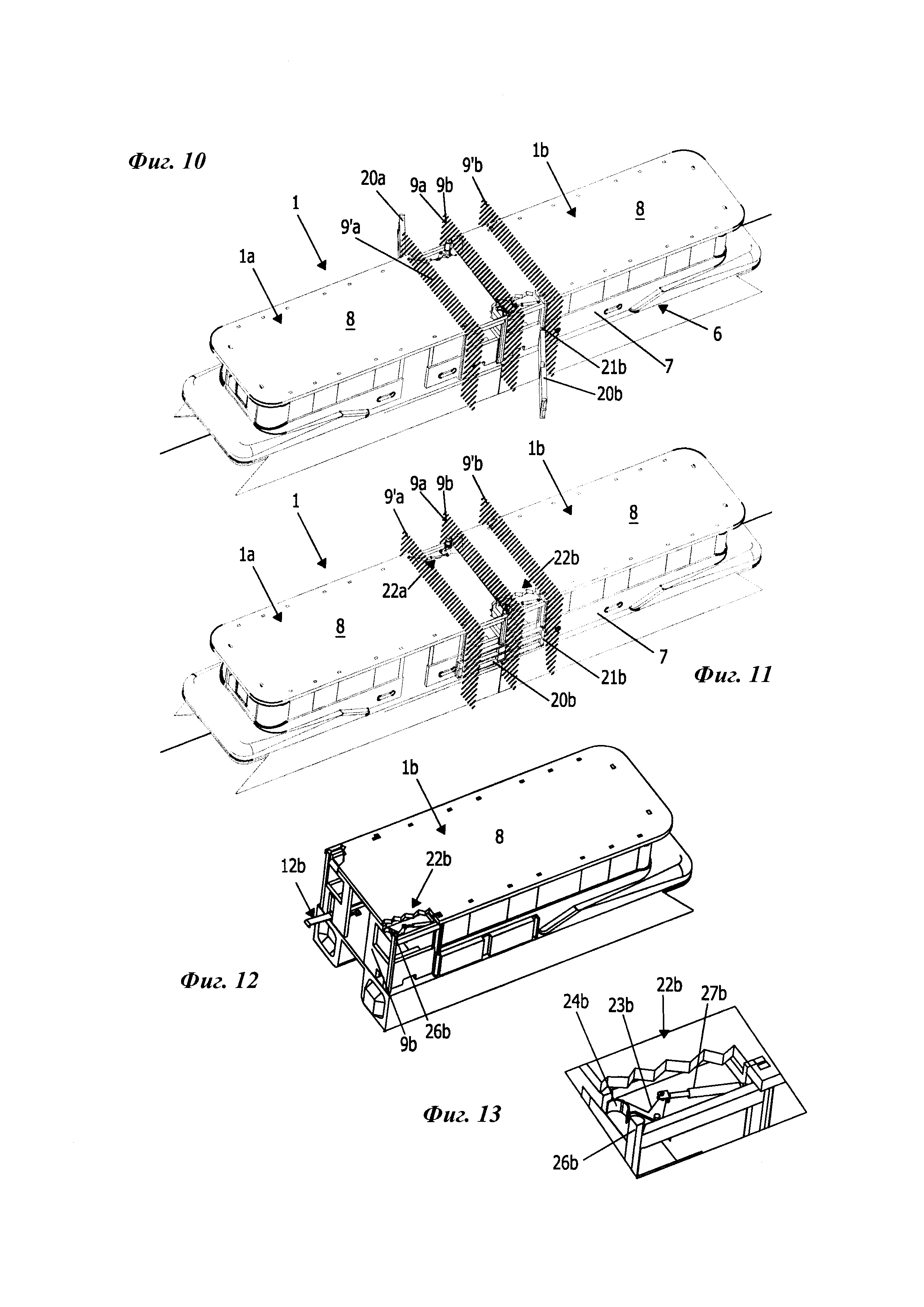
Фиг. 10 показывает, в аксонометрическом виде, катамаранное судно;
Фиг. 11 показывает катамаранное судно в другое время со ссылкой на фиг. 10;
Фиг. 12 показывает некоторые части компонента по фиг. 2b;
Фиг. 13 является сборкой катамаранного судна, отличающейся от той что на фиг. 8;
Фиг. 14 показывает деталь по фиг. 13;
Фиг. 15 показывает другой пример катамаранного судна согласно изобретению;
Фиг. 16a показывает еще один пример катамаранного судна согласно изобретению;
Фиг. 16b показывает другой пример катамаранного судна по фиг. 16a;
Фиг. 17a является дополнительным примером катамаранного судна согласно изобретению;
Фиг. 17b показывает другой вид катамаранного судна по фиг. 17a;
Фиг. 18 показывает сборку альтернативную той, что на фиг. 7;
Фиг. 19a является деталью фиг. 18; и
Фиг. 19b является деталью фиг. 18a в другом положении.
В этом документе измерения, величины, формы и геометрические отсылки (как прямоугольность и параллельность), связанные с такими словами, как «около» или схожими терминами, такими как «почти» или «по существу», должны рассматриваться как погрешности измерения или неточности из-за ошибок производства и/или изготовления, и, прежде всего, за исключением небольшого отклонения от значения, от размера, от формы или от геометрической отсылки, с которыми они связаны. Например, такие термины, когда они связаны с величиной, предпочтительно указывают на расхождение не более 10% от самой величины.
Кроме того, при использовании такие термины, как «первый», «второй», «верхний», «нижний», «основной» и «вторичный», не обязательно определяют порядок, приоритет отношения или относительное положение, но могут просто быть использованы для более четкого различия между различными компонентами.
Со ссылкой на фигуры, катамаранное судно согласно изобретению во всем тексте обозначено позицией 1.
Оно предназначен для использования в морской навигации или во внутренних водах (или защищенных). В частности, катамаранное судно 1 может быть, следовательно, использовано для навигации по водному пути, который является судоходным каналом естественного или искусственного происхождения, используемым для управления движением судов, таким как, например, река или озеро.
Катамаранное судно 1 содержит по меньшей мере одно катамаранное судно и, предпочтительно, два катамаранных судна, а именно первое катамаранное судно 1a (фиг. 2a и 3a) и второе катамаранное судно 1b (фиг. 2b и 3b). В частности, оно получается устойчивым соединением двух по существу идентичных катамаранных судов 1a, 1b, причем оба имеют катамаранный корпус и каждое определяет срединную ось х.
Каждое из упомянутых катамаранных судов 1a, 1b содержит носовую часть 2a, 2b, кормовую часть 3a, 3b и по меньшей мере одно из моторных средств 4a, 4b и направляющих средств 5a, 5b. В частности, первое катамаранное судно 1a может действовать независимо и, следовательно, содержит первую носовую часть 2a, первую кормовую часть 3a, первые моторные средства 4a, первые направляющие средства 5a, предусмотренные вдоль преимущественного направления продольного расширения того же катамаранного судна, совпадающего со срединной осью х; причем второе катамаранное судно, также функционирующее независимо, содержит вторую носовую часть 2b, вторую кормовую часть 3b и одни из вторых моторных средств 4b и вторых направляющих средств 5b. Предпочтительно каждое катамаранное судно 1a, 1b функционирует независимо и, следовательно, содержат носовую часть 2а, 2b, кормовую часть 3a, 3b и моторные средства 4a, 4b и направляющие средства 5a, 5b, предусмотренные вдоль преимущественного направления продольного расширения того же катамаранного судна, совпадающего со срединной осью х.
Предпочтительно каждое катамаранное судно 1a и 1b представляет собой станцию управления (а именно рубку) 110, подходящим образом соединенную со средствами 4a, 4b, 5a и 5b, чтобы управлять направлением и скоростью продвижения катамаранного судна 1a и 1b и, в частности, катамаранного судна 1.
Упомянутые моторные средства 4a, 4b содержат для каждого катамаранного судна 1a и 1b азимутальное подруливающее устройство, предусмотренное в соответствующей носовой части 2a, 2b, а упомянутые направляющие средства 5a, 5b содержат, для каждого катамаранного судна, перо руля, предусмотренное в соответствующей кормовой части 3a, 3b.
Моторные средства 4a, 4b содержат азимутальное подруливающее устройство, в целях удобства, приспособленное вращаться вокруг направляющей оси 4c, предпочтительно, по существу, перпендикулярной опорной поверхности, изменяя таким образом направление тягового усилия.
Направляющие средства 5a и 5b содержат перо руля, в целях удобства, приспособленное вращаться вокруг направляющей оси 5c, предпочтительно, по существу, перпендикулярной опорной поверхности, изменяя таким образом направление продвижения.
Оси 5c и 4c по существу параллельны друг другу, в частности, лежат на плоскости, почти параллельной срединной оси х. Предпочтительно оси 4c, 5c и х лежат, по существу, на одной плоскости.
Средства 4a, 4b, 5a и 5b и, в частности, азимутальное подруливающее устройство и перо руля приспособлены вращаться независимо друг от друга, чтобы позволить каждому катамаранному судну 1a и 1b, и, следовательно, катамаранному судну 1 избирательно перемещаться вдоль поперечного направления и, в некоторых случаях, перпендикулярно срединной оси х, продвигаясь вдоль срединной оси х почти до поворотного перемещения и, в деталях, почти до поворота.
Корпус каждого катамаранного судна 1a, 1b содержит несущую конструкцию 6, состоящую из моста и, предпочтительно надстройки, образованной боковыми стенками 7 и потолком 8.
Конструкция кормовой части 3a, 3b каждого катамаранного судна 1a, 1b плоская и подходяще сжатая для приспособления соединительных средств и необходимых органов для соединения.
Каждое катамаранное судно 1a, 1b также содержит два боковых корпуса 100, на которые оно опирается и между которыми, по существу, лежит конструкция 6.
Боковые корпуса 100 каждого судна 1a, 1b имеют край, определяющий контактную поверхность 100a и 100b, приспособленную контактировать с соответствующей контактной поверхностью 100b и 100a другого катамаранного судна 1a и 1b; и, соответственно, другой край сужается так, чтобы облегчить движение катамаранного судна 1 и/или отдельного катамаранного судна 1a и 1b.
Контактные поверхности 100a и 100b параллельны между собой и, в деталях, по существу соответствуют друг другу по форме так, чтобы взаимно опираться и, следовательно, облегчают соединение между катамаранными судами 1a и 1b.
Показано, как средства 4a, 4b, 5a и 5b предпочтительно ограничены несущей конструкцией 6 и, соответственно, размещены между боковыми корпусами 100.
Со ссылкой на фиг. 4, 5 и 7, каждое катамаранное судно 1a, 1b содержит две поперечные переборки 9a и 9'a, 9b и 9'b, размещенные на двух последних рамных конструкциях несущей конструкции 6, расположенных в кормовой части 3a, 3b.
Такие переборки 9a и 9'a, 9b и 9'b идентифицируют отсек 29a, 29b в конце кормы 3a, 3b каждого отдельного катамаранного судна 1a, 1b, в котором должны происходить все операции соединения, для получения одного катамаранного судна 1.
Благодаря соответствующей структурной жесткости отсеков 29a, 29b, на переборках 9'a, 9a, 9b и 9'b напряжения, возникающие при сборке катамаранных судов 1a и 1b, снимаются.
Упомянутое первое катамаранное судно 1a и упомянутое второе катамаранное судно 1b каждое содержат соединительные средства для их взаимного устойчивого соединения, полученного относительным соответствием кормовых частей 3a, 3b, в поперечной плоскости стыка П (фиг. 1, 2a, 2b, 3a и 3b и 6).
Контакт имеет место между двумя внешними кормовыми переборками 9a, 9b каждого катамаранного судна.
Упомянутые соединительные средства содержат:
- средства выравнивания, приспособленные для обеспечения коаксиальности упомянутых первого катамаранного судна 1a и второго катамаранного судна 1b;
- соединительные средства для упомянутых первого и второго катамаранных судов 1a и 1b;
- средства крепления, приспособленные для обеспечения устойчивости и жесткости соединения упомянутых первого и второго катамаранных судов 1a, 1b; и, соответственно,
- соединители, приспособленные для передачи данных/энергии между катамаранными судами и, следовательно, на станцию управления для управления всеми направляющими и моторными средствами катамаранного судна;
Кроме того, соединительные средства предпочтительно содержат по меньшей мере один уплотнитель, приспособленный вставляться между блоками 1a и 1b, для избегания попадания воды между катамаранными судами, когда они взаимно ограничены соединительными средствами, и особенно для компенсации возможного допуска, а также деформаций контактных переборок.
В частности, со ссылками на фиг. 6 и 7, упомянутые средства выравнивания содержат средства соединения формы, предусмотренные на соответствующих переборках 9a, 9b наружной зоны кормы 3a, 3b каждого катамаранного судна 1a, 1b.
Упомянутые средства соединения формы работают в соответствии с упомянутой поперечной плоскостью стыка П.
Каждое катамаранное судно 1a, 1b содержит на своей внешней кормовой переборке 9a, 9b и, в частности, на контактных поверхностях 100a и 100b, усеченную пирамидальную конструкцию 10a, 10b, которая выступает относительно внешней поверхности кормы 3a, 3b, и подходящую по форме нишу 11a, 11b, с противоположной стороны этой же кормы. Усеченная пирамидальная конструкция 10a, 10b и упомянутая подходящая по форме ниша 11a, 11b, имеют дополняющие друг друга профили, чтобы взаимодействовать со скольжением соответствующих наклонных плоскостей во время работы.
Поэтому первое катамаранное судно 1a содержит на контактной поверхности 100a усеченную пирамидальную конструкцию 10a, а на другой контактной поверхности 100a подходящую по форме нишу 11a; причем второе катамаранное судно 1b содержит на контактной поверхности 100b такую структуру, как усеченная пирамида 10b, а на другой поверхности контакта 100b соответствует подходящую по форме нишу 11b.
Подчеркиваем, что на структурах 10a и 10b могут быть расположены соединители, так что, когда катамаранные суда 1a и 1b соединены, соединенные соединители позволяют передавать данные/энергию между катамаранными судами 1a и 1b. Альтернативно, они могут быть размещены на переборках 9a и 9'a, 9b и 9'b, соответственно, над ватерлинией катамаранного судна 1.
Кроме того, каждое катамаранное судно 1a, 1b может содержать, соответственно, размещенный на внешней кормовой переборке 9a, 9b, по меньшей мере, один уплотнитель, приспособленный сцепляться с другим уплотнителем, размещенным на других блоках 1a и 1b, чтобы герметично скрепить катамаранное судно 1, компенсируя деформации.
Предпочтительно, уплотнитель, размещенный в подходящей по форме нише на кормовой переборке, помещается вдоль первого полупериметра первого блока 1a и вдоль второго полупериметра второго блока 1b, так что, когда блоки взаимно соединены соединительными средствами, два уплотнителя распределяются по всему периметру, герметично скрепляя катамаранное судно 1, компенсируя деформации.
После соединения двух катамаранных судов 1a, 1b усеченная пирамидальная конструкция 10a упомянутого первого катамаранного судна 1a будет вставлена в подходящую по форме нишу 11b упомянутого второго катамаранного судна 1b, в то время как ниша На первого катамаранного судна 1a будет вмещать усеченную пирамидальную конструкцию 10b второго катамаранного судна 1b. Таким образом, две кормы 3a, 3b будут идеально совпадать друг с другом, предпочтительно, по существу соответствующие срединные оси х катамаранных судов 1a и 1b будут совпадать, и все катамаранное судно 1 будет, таким образом, по существу симметричным относительно поперечной плоскости стыка П.
В частности, со ссылками на фиг. 7, 8 и 9, упомянутые соединительные средства содержат подвижный крюк 12a, 12b, предусмотренный на каждом катамаранном судне 1a, 1b и приспособленный для взаимодействия, ортогонально упомянутой поперечной плоскости стыка П, с соответствующим удерживающим клинообразным элементом 13a, 13b, предусмотренным на противоположном катамаранном судне.
Когда два катамаранных судна 1a, 1b работают отдельно, каждый крюк 12a, 12b размещается внутри специально отведенного места 14a, 14b, образованного в отсеке 29a, 29b, ограниченном кормовыми переборками 9a и 9'a, 9b и 9'b, соответствующего катамаранного судна (фиг. 7), в то время как при использовании упомянутый крюк 12a, 12b приспособлен для размещения, поворота, ортогонально соответствующей внешней кормовой переборке 9a, 9b (фиг. 8).
Упомянутый крюк 12a, 12b образован лапой 15a, 15b, снабженной загнутым концом 16a, 16b, и подсоединенной противоположным концом скользящим шарниром 17a, 17b в кормовом отсеке 29a, 29b.
Упомянутый удерживающий элемент 13a, 13b в то же время предусмотрен вдоль гнезда 18a, 18b, выполненного в отсеке 29a, 29b каждого катамаранного судна 1a и 1b.
Соединение имеет место, когда лапа 15a, 15b, скользящая в гнезде 18a, 18b, достигает своим загнутым концом 16a, 16b удерживающего элемента 13a, 13b и зацепляется, как показано на фиг. 9.
Как только загнутый конец лапы 16a, 16b преодолел упомянутый удерживающий элемент 13a, 13b, и гидравлический поршень 19a, 19b, предусмотренный на противоположном конце лапы крюка, посредством скользящего шарнира 17a, 17b, создает тяговое усилие в сближении так, чтобы удерживать две кормы 9a, 9b, и тем самым два катамаранных судна 1a, 1b, натягиваясь между ними.
Упомянутые средства крепления содержат панель 20a, 20b, шарнирно присоединенную слева от каждого катамаранного судна 1a, 1b и предназначенную для стабильной фиксации на противоположном катамаранном судне 1a, 1b (фиг. 7, 10 и 11).
Упомянутая панель 20a, 20b присоединена посредством шарнира с вертикальной осью 21a, 21b с внешней стороны конструкционной переборки 9'a, 9'b, обращенной к корме.
Упомянутая панель 20a, 20b, поворачиваясь вокруг шарнира 21a, 21b, приспособлена для стабильной фиксации на обеих кормовых переборках 9a и 9b, причем конструкционная переборка 9'a, 9'b, обращена к кормовой части, на противоположном катамаранном судне. Таким образом, оба структурных отсека 29a, 29b двух противоположных катамаранных судов 1a, 1b работают вместе в равной мере с усилием, создаваемым сборкой.
Та же функция стабильной фиксации между катамаранными судами 1a, 1b обеспечивается также дополнительными средствами крепления, выполненными с крюковым захватом 22a, 22b, предусмотренного на панели покрытия 8 корпуса каждого катамаранного судна (фиг. 10-14).
Упомянутый крюк по существу представляет собой плеч рычага 23a, 23b на одном конце которого предусмотрен зажим 24a, 24b, предназначенный для взаимодействия с соответствующим удерживающим элементом 25.
Упомянутый удерживающий элемент получают с помощью подходящего формирования 26a, 26b верхней части каждой внешней кормовой переборки 9a, 9b таким образом, что в сопряженном положении две профилированные части 26a и 26b, совмещаясь друг с другом, образуют полуцилиндрический удерживающий элемент 25, полностью зацепленный зажатием соответствующего захвата.
Упомянутый прямолинейный элемент с полуцилиндрической геометрией 25 является результатом сочетания двух внешних переборок 9a, 9b кормы каждого катамаранного судна 1a, 1b и расположен на их верхнем краю.
После зацепления гидравлический поршень 27a, 27b, предусмотренный на противоположном конце плеча рычага 23a, 23b, позволяет осуществлять захват, такой как затягивание зажима 24a, 24b вокруг удерживающего элемента 25 и плотное удержание, одной по отношению к другой, выступающих частей 26a, 26b двух внешних кормовых переборок 9a и 9b (фиг. 14), тем самым добавляя еще один элемент крепления двух катамаранных судов 1a, 1b и обеспечивая пару еще более стабильную и безопасную.
Сборка катамаранного судна 1 происходит в три отдельные фазы:
- приближение упомянутого первого и упомянутого второго катамаранных судов 1a, 1b (фиг. 6),
- выравнивание и соединение двух катамаранных судов 1a, 1b (фиг. 6, 8 и 9);
- осмотр устойчивости и надежности двух катамаранных судов 1a, 1b для реализации одного катамаранного судна 1 (фиг. 10, 11).
Операция сближения между кормами катамаранных судов 1a, 1b перед механическим соединением может быть выполнена с помощью моторных средств и направляющих средств. Азимутальное подруливающее устройство в носовой части и перо руля в кормовой части каждого катамаранного судна действуют в тесном взаимодействии, обеспечивая, даже с небольшим движением, правильное позиционирование двух катамаранных судов и взаимное выравнивание, так что соответствующие срединные оси х, которые расширены вдоль преимущественного направления расширения каждого катамаранного судна, совпадают (фиг. 6). Оптимальные условия для выполнения маневров обеспечивает спокойная вода и поэтому они должны выполняться в портах.
Во время операции выравнивания оператор освобождает крюки 12a, 12b двух катамаранных судов 1a, 1b из их гнезд, поворачивая их вверх, чтобы расположить их в горизонтальном положении под прямым углом к соответствующим стенкам переборок. Эта операция также может быть автоматизирована (фиг. 7 и 8).
Когда выполнен полный поворот, с каждого катамаранного судна 1a, 1b выступает крюк 12a, 12b соединения на корме в соответствии с преимущественным направлением расширения.
На ранних этапах сближения, продвижение позволяет выдвинутым крюкам скользить внутри соответствующих гнезд 18a, 18b, сформированных в несущей конструкции противоположного катамаранного судна 1a, 1b, для достижения удерживающих элементов 13a, 13b.
Затем, за счет продвижения, два крюка вставлены в их гнезда, и они зацепили удерживающие элементы, оператор приводит в действие электрическую или гидравлическую систему, которая, перемещая поршень 19a, 19b каждой лапы, закрывает крюки на соответствующих удерживающих элементах (фиг. 9), приводящих к устойчивому контакту оба катамаранных судна.
Чтобы гарантировать окончательное центрирование, две пирамидальные структуры 10a, 10b, выступающие из кормовых переборок каждого катамаранного судна, вставлены в подходящие по форме противоположные ниши 11a, 11b, во избежание опасностей случайных поворотов и перекосов, и, предпочтительно, способствующие передаче сдвиговых напряжений.
После фазы центрирования два катамаранных судна 1a, 1b полностью объединяются с соответствующей кормовой переборкой, чтобы определить плоскость пересечения П.
Целью фазы крепления является обеспечение относительного положения, достигнутого выравниванием, на устойчивом, структурно-безопасном и окончательном уровне, чтобы рассмотреть катамаранное судно, собранное как единый элемент, с архитектурной точки зрения (фиг. 1, 10 и 11).
В примере, первичным для крепления рассматривалось срабатывание поворачивающихся панелей, а вторичным затягивание соединительных захватов. Ничего не изменилось бы, если бы движение элементов было бы в обратном порядке.
Панели 20a, 20b каждого катамаранного судна 1a, 1b отцепляются от их гнезд и поворачиваются вокруг шарниров с вертикальной осью 21a, 21b, чтобы сцепиться с противоположной стороной катамаранного судна, креплением к нему в соответствии с его конструкцией, в частности на конструкционных переборках, составляющих отсеки 29a, 29b.
После поворота панелей, они действуют захватами 24a, 24b.
Когда крепление завершено, два катамаранных судна представляют собой единое катамаранное судно с бортовыми системами, управляемыми одной станцией управления 110, рулевой рубкой, выбранной капитаном из двух доступных.
Каждая бортовая система (спринклерная система, трюмная система, система пресной воды, канализационная система, электрическая система, топливная система и т.д.) выполнена модульно, с блоками управления, размещенными на станции управления 110, для равномерного использования функции ведущего или ведомого.
Капитан может выбирать станцию управления 110 между двумя существующими и эквивалентными, просто в соответствии с конкретной миссией, и может иметь доступ ко всем бортовым системам, включая двигатели.
Собранное катамаранное судно 1 фактически оснащено двумя азимутальными подруливающими устройствами 4a, 4b, расположенными на концах полученного корпуса. Перо руля 5a, 5b в этой конфигурации остается зафиксированным в положении вдоль продольной оси катамаранного судна и, следовательно, не содействует движению.
Капитан, с помощью джойстика, решает выполнить маневры. Соответствующая система управления, в зависимости от физических и геометрических характеристик катамаранного судна, может воздействовать на двигатели в соответствии с маневром, накладывая на них тягу и вращение.
Подробно, азимутальные подруливающие устройства упомянутых первого и второго катамаранных судов могут вращаться на своих соответствующих осях либо независимо, либо скоординированным и зависимым образом для перемещения упомянутого катамаранного судна.
В качестве примера приведены основные маневры, которые может выполнять катамаранное судно 1: перемещение, поворот и поворот на месте.
Во время перемещения катамаранное судно 1 сдвигает свой центр тяжести по прямой линии, сохраняя при этом постоянное продольное направление движения. Угол между направлением движения и продольным направлением может меняться от 0 до ±180°.
Для движения по прямой линии необходимо поворачивать оба подруливающих устройства на один и тот же угол, как по модулю, так и по знаку.
Во время поворота катамаранное судно 1 перемещает свой центр тяжести по касательной к кривой, сохраняя то же самое продольное направление. Чтобы сделать поворот, два подруливающих устройства могут действовать зависимо или независимо друг от друга. В случае зависимости оба будут вращаться на один и тот же угол по модулю, но с противоположным направлением. В случае независимости азимутальные подруливающие устройства будут поворачиваться на разные углы по модулю и знаку. Частный случай поворота может быть получен вращением только подруливающего устройства.
Наконец, во время поворота на месте катамаранное судно с фиксированным центром тяжести вращается в продольном направлении: для выполнения поворота на месте оба подруливающих устройства должны быть повернуты на один угол, равный 90°, в противоположных направлениях.
В некоторых случаях, катамаранное судно 1 содержит, помимо катамаранных судов 1a и 1b, одно или несколько промежуточных катамаранных судов 1c, приспособленных для размещения между катамаранными судами 1a и 1b и, следовательно, для дополнительного увеличения грузоподъемности катамаранного судна 1. В этом случае катамаранное судно 1 получают стабильным сцеплением двух катамаранных судов 1a, 1b, по существу, идентичных, и между катамаранными судами 1a и 1b, одного или нескольких промежуточных катамаранных судов.
Каждое промежуточное катамаранное судно 1c содержит промежуточный катамаранный корпус и определяет промежуточную носовую часть, промежуточную кормовую часть и промежуточную срединную ось. В частности, оно многокорпусное и содержит два промежуточных боковых корпуса 28e, промежуточную несущую конструкцию 29, облицованную промежуточными боковыми стенками и промежуточным потолком.
В некоторых случаях промежуточное катамаранное судно 1c может содержать промежуточную станцию управления и, по меньшей мере, одни из промежуточных моторных средств и промежуточных направляющих средств, расположенных в носовой части и/или в кормовой части и, по существу аналогичные вышеупомянутым средствам 4a, 4b, 5a и 5b катамаранных судов 1a и 1b. Предпочтительно, промежуточное катамаранное судно 1c содержит станцию управления и промежуточные моторные средства и промежуточные направляющие средства, расположенные на противоположных концах, что спереди и сзади.
Кроме того, каждое промежуточное катамаранное судно 1c содержит на промежуточной носовой части и промежуточной кормовой части промежуточные соединительные средства, позволяющие связать промежуточное судно с катамаранными судами 1a и 1b и/или с одним или несколькими промежуточными катамаранными судами.
Промежуточные соединительные средства содержат:
- промежуточные средства выравнивания, приспособленные для обеспечения коаксиальности катамаранного судна 1c с катамаранными судами 1a и 1b, и, если представлено более чем одно промежуточное катамаранное судно 1c, то с промежуточным катамаранным судном 1c;
- промежуточные соединительные средства для упомянутых первого и второго катамаранных судов 1a и 1b;
- промежуточные средства крепления, приспособленные для обеспечения устойчивости и жесткости соединения между судном 1c и, по меньшей мере, одним из катамаранных судов 1a и 1b и, если представлено более чем одно промежуточное катамаранное судно 1c, между промежуточными катамаранными судами 1c; и, соответственно,
- промежуточные соединители и, соответственно,
- и, необязательно, по меньшей мере, один промежуточный уплотнитель, выполненный так, чтобы вставляться между судном 1c и, по меньшей мере, одним из катамаранных судов 1a и 1b и, если представлено больше промежуточных катамаранных судов 1c, между парой промежуточных катамаранных судов 1c, для избегания попадания воды между судами, когда они взаимно ограничены соединительными средствами и, предпочтительно, компенсируя деформации.
Промежуточные соединительные средства аналогична
соединительным средствам катамаранных судов 1a и 1b. В частности, промежуточные средства выравнивания по существу аналогичны вышеописанным средствам выравнивания 10a, 10b, 11a, 11b, промежуточные соединительные средства по существу аналогичны описанным выше соединительным средствам 12a, 12b, 13a, 13b, 14a, 14b, 15a, 15b, 16a, 16b, 17a, 17b, 18a, 18b, 19a, 19b. Промежуточные фиксирующие средства по существу аналогичны описанным выше фиксирующим средствам 20a, 20b, 21a, 21b, 22a, 22b, 23a, 23b, 24a, 24b, 25, 26a, 26b, 27a, 27b; Промежуточные соединители по существу аналогичны описанным выше соединителям; И промежуточный уплотнитель по существу аналогичен описанному выше уплотнителю.
Преимущественно, как показано на фиг. 15, промежуточное катамаранное судно 1c может содержать, по меньшей мере, один дополнительный промежуточный корпус 30, приспособленный для улучшения устойчивости катамаранного судна 1. В частности, промежуточное катамаранное судно 1c содержит, по меньшей мере, один и, точнее, ровно два промежуточных дополнительных корпуса 30, расположенных снаружи на промежуточных боковых корпусах 28 и, в частности, на противоположных сторонах промежуточных боковых корпусов 28, чтобы заключить между ними промежуточные боковые корпуса 28.
Упомянутые дополнительные промежуточные корпуса 30 имеют секцию, которая может соответственно быть меньше промежуточной секции боковых корпусов 28.
Дополнительные промежуточные корпуса 30 по сути имеют длину, меньшую длины промежуточных боковых корпусов 28. Альтернативно, дополнительные промежуточные корпуса 30 соответственно имеют длину, по меньшей мере, равную и, особенно, большую, чем длина промежуточных боковых корпусов 28.
Наконец, в некоторых случаях, со ссылкой на фиг. 16 и 17, катамаранное судно 1 содержит единственное катамаранное судно, действующее независимо и определяющее носовую часть 2, кормовую часть 3 и срединную ось х.
Катамаранное судно содержит катамаранный корпус и, в частности, два боковых корпуса 100; несущую конструкцию 6, соединяющую боковые корпуса 100 и определяющую опорную поверхность; моторные средства 4, приспособленные для создания тяговой силы катамаранного судна/лодки и выборочно размещенные в носовой части 2 или кормовой части 3; и направляющие средства 5, приспособленные определять вместе с моторными средствами 4 направление движения катамаранного судна и, следовательно, катамаранного судна 1 и размещенные на противоположной стороне от моторных средств 4 и, следовательно, выборочно в кормовой части 3 или носовой части 2.
В частности, моторные средства 4 находятся в носовой части 2, а направляющие средства 5 в кормовой части 3 (фиг. 17a и 17b). Альтернативно, моторные средства 4 находятся в кормовой части 3, а направляющие средства 5 в носовой части 2 (фиг. 16a и 16b).
Моторные средства 4 и направляющие средства 5 ограничены конструкцией 6 и предпочтительно размещены между боковыми корпусами 100 и, более предпочтительно, вдоль срединной оси х.
Моторные средства 4 содержат азимутальное подруливающее устройство, удобно, приспособлено вращаться вокруг направляющей оси 4c, по существу, перпендикулярной опорной поверхности, тем самым изменяя направление тяговой силы.
Направляющие средства 5 содержат: перо руля, надлежащим образом, выполненное вращаться вокруг направляющей оси 5c, по существу перпендикулярной опорной поверхности, тем самым изменяя направление продвижения.
Оси 5c и 4c по существу взаимно параллельны, в частности, они лежат на плоскости, по существу параллельной срединной оси х. Предпочтительно оси 4c, 5c и х лежат, по существу, на одной плоскости.
Оси 5c и 4c по существу перпендикулярны к опорной поверхности.
Средства 4 и 5 и, в частности, азимутальное подруливающее устройство и перо руля приспособлены вращаться независимо друг от друга, чтобы позволить катамаранному судну 1 выборочно перемещаться вдоль поперечного направления и, в некоторых случаях, перпендикулярно к срединной оси х, продвигаясь вдоль оси х или, до поворотного перемещения и, в частности, по существу, вращаясь.
Предпочтительно, катамаранное судно имеет станцию управления, рубку, 110, соответствующим образом соединенную с тяговыми средствами 4 и направляющими средствами 5, чтобы управлять направлением и скоростью продвижения и, следовательно, указанными средствами.
Несущая конструкция 6 называется мостом и подвешена/расположена между боковыми корпусами, она соединяет сами корпуса, определяя несущую конструкцию.
Конструкция, называемая надстройкой, может быть установлена на мосту сверху и образована боковыми стенками 7 и потолком 8.
Боковые корпуса 100 имеют оба конца с формой известного типа и, в частности, конусом, чтобы облегчить движение катамаранного судна и, следовательно, катамаранного судна 1. В качестве альтернативы боковые корпуса 100 имеют, как показано на фиг. 18, один конец, предпочтительно носовую часть 2, конический и другой конец, предпочтительно кормовую часть 3, не конический и, в частности, заканчивающийся плоской поверхностью, подходящей и по существу перпендикулярной ватерлинии.
Изобретение восприимчиво к вариациям, входящим в объем идеи изобретения. Все детали могут быть заменены эквивалентными элементами, а материалы, формы и размеры могут иметь любую природу и величину.
Например, соединительные средства и запирающие средства могут по существу совпадать и, в частности, содержать, по меньшей мере, один компрессионный фитинг (фиг. 18, 19a, 19b).
Кроме того, блоки 1a и 1b могут содержать дополнительные опорные средства, способные предотвращать относительное перемещение между катамаранными судами 1a и 1b вдоль плоскости, перпендикулярной оси х, чтобы позволить компрессионному фитингу работать почти исключительно для сжатия.
В частности, первое катамаранное судно 1a, как показано на фиг. 18, содержит, по меньшей мере, один первый компрессионный фитинг 31a, расположенный в кормовой части 3a. Предпочтительно, первое катамаранное судно 1a содержит два первых компрессионных фитинга 31a, расположенных в кормовой части 3a.
Первый компрессионный фитинг 31a, а также второй 31b содержит первый соединительный штифт 311b, интегрируемый со вторым катамаранным судном 1b; первую стрелу 312a, имеющую один конец, шарнирно прикрепленный к первому катамаранному судну 1a; первую дополнительную стрелу 313a, снабженную первым крюком 314a, прикрепленную к первому штифту 311b и имеющую конец, противоположный указанному первому крюку 314a, шарнирно прикрепленный к первой стреле 312a; и первый линейный привод 315a, имеющий один конец, шарнирно прикрепленный к первому катамаранному судну 1a, а другой к точке поворота между первыми стрелами 312a и 313a.
Первый штифт 311b расположен во втором гнезде 18b.
Первые стрелы 312a, 313a, первый крюк 314a и первый линейный привод 315a помещены в первое гнездо 18a.
Первый линейный привод 315a управляет в зависимости от изменения длины (предпочтительно удлинения) взаимным вращением первых стрел 312a и 313a относительно первого катамаранного судна 1a.
Указанное вращение приводит к тому, что первый крюк 314a, находящийся за пределами первого гнезда 18a, помещается во второе гнездо 18b и затем фиксируется с первым штифтом 311b.
Такая фиксация первого крюка 314a с первым штифтом 311b определяет шарнирный треугольник, в котором первая стрела на своих концах шарнирно соединена с первым катамаранным судном 1a и первой дополнительной стрелой 313a, которая, в свою очередь, шарнирно соединена через первый крюк 314a с первым штифтом 311b, а затем со вторым катамаранным судном 1b (фиг. 19a).
В этот момент первый линейный привод 315a осуществляет новое изменение длины, противоположное предыдущему (предпочтительно сокращение).
Сокращение первого линейного привода 315a накладывает на первые стрелы 312a и 313a вращение в противоположном направлении, которое объединяет и связывает совместно второе катамаранное судно 1b с первым катамаранным судном 1a (фиг. 19b).
Второе катамаранное судно 1b, как показано на фиг. 18, содержит, по меньшей мере, один компрессионный фитинг 31b, расположенный/размещенный в кормовой части 3b и, в частности, два компрессионных фитинга 31b, расположенных в кормовой части 3b.
Второй компрессионный фитинг 31b содержит второй штифт 311a, интегрируемый с первым катамаранным судном 1a; вторую стрелу 312b, имеющую один конец, шарнирно соединенный со вторым катамаранным судном 1b; вторую дополнительную стрелу 313b, снабженную вторым крюком 314b, прикрепленную ко второму штифту 311a и имеющую конец, противоположный указанному второму крюку 314b, шарнирно прикрепленный ко второй стреле 312b; и второй линейный привод 315b, имеющий один конец, шарнирно соединенный со вторым катамаранным судном 1b, а второй с точкой поворота между вторыми стрелами 312b и 313b.
Второй штифт 311a расположен в первом гнезде 18a.
Вторая стрела 312b, 313b, второй крюк 314b и второй линейный привод 315b помещены во второе гнездо 18b.
Второй линейный привод 315b управляет в зависимости от изменения длины (предпочтительно удлинения) взаимным вращением вторых стрел 312b и 313b относительно второго катамаранного судна 1b.
Указанное вращение приводит к тому, что второй крюк 314b находящийся за пределами второго гнезда 18b, помещается в первое гнездо 18a и затем фиксируется со вторым штифтом 311a.
Такая фиксация второго крюка 314b со вторым штифтом 311a определяет шарнирный треугольник, в котором вторая стрела 312b на своих концах шарнирно соединена со вторым катамаранным судном 1b и второй дополнительной стрелой 313b, которая, в свою очередь, шарнирно соединена через второй крюк 314b со вторым штифтом 311a и затем с первым катамаранным судном 1a (фиг. 19a).
В этот момент второй линейный привод 315b осуществляет новое изменение длины, противоположное предыдущему (предпочтительно сокращение).
Сокращение второго линейного привода 315b накладывает на вторые стрелы 312b и 313b вращение в противоположном направлении, которое объединяет и связывает совместно первое катамаранное судно 1a со вторым катамаранным судном 1b (фиг. 19b).
Дополнительные связующие средства каждого катамаранного судна 1a, 1b содержат на своей внешней кормовой переборке 9a, 9b дополнительную усеченную пирамидальную конструкцию, которая выступает относительно внешней поверхности кормы 3a, 3b и подходящую по форме нишу, дополняющую дополнительную усеченную пирамидальную конструкцию, чтобы поместить внутрь дополнительную усеченную пирамидальную конструкцию, предотвращая относительное движение между катамаранными судами 1a и 1b вдоль плоскости, перпендикулярной срединной оси х.
Дополнительная усеченная пирамидальная конструкция и подходящая по форме ниша имеют дополнительную секцию, чтобы взаимодействовать, по существу, посредством контакта соответствующих наклонных плоскостей во время движения.
Реферат
Изобретение относится к морской отрасли и касается, в частности, катамаранного судна (1), содержащего: первое катамаранное судно (1a), функционирующее независимо, имеющее преобладающее направление продольного расширения вдоль срединной оси (x) и содержащее носовую часть (2a), кормовую часть (3a), моторные средства (4a) и направляющие средства (5a); второе катамаранное судно (1b), функционирующее независимо, имеющее преобладающее направление продольного расширения вдоль срединной оси (x) и содержащее носовую часть (2b), кормовую часть (3b), моторные средства (4b) и направляющие средства (5b), причем упомянутое первое катамаранное судно (1a) и упомянутое второе катамаранное судно (1b), каждое, содержат соединительные средства для их взаимного устойчивого соединения, полученного соединением вместе их кормовых частей (3a, 3b), в поперечной плоскости стыка (П), для реализации упомянутого катамаранного судна (1), приспособленного функционировать как единое целое. Техническим результатом изобретения является создание модульного катамаранного судна с определенной грузоподъемной гибкостью, изменяющегося, чтобы удовлетворить любые условия перевозки; а также реализация прочного, жесткого катамаранного судна, грузоподъемность которого легко изменяется в условиях максимальной безопасности для операторов и характеризующегося высокой простотой маневрирования. 9 з.п. ф-лы, 19 ил.
Комментарии