Устройство для осаждения атомного слоя и способ загрузки устройства для осаждения атомного слоя - RU2518845C2
Код документа: RU2518845C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству осаждения атомного слоя (ALD - atomic layer deposition) и способу загрузки такого устройства.
Уровень техники
Метод эпитаксии атомного слоя (ALE - atomic layer epitaxy), был изобретен доктором Туомо Сунтола (Tuomo Suntola) в начале 1970-х годов. Другое родовое наименование метода - осаждение атомного слоя (ALD - atomic layer deposition), в настоящее время оно используется вместо ALE. ALD это специальный химический метод осаждения, основанный на последовательном направлении, по меньшей мере, двух видов реакционных прекурсоров на подложку, размещенную в нагретой реакционной зоне. Механизм роста при ALD основан на различии прочностей связи химической адсорбции (хемосорбции) и физической адсорбции. В процессе осаждения ALD используется хемосорбция и устраняется физическая адсорбция. При хемосорбции между атомом (атомами) поверхности твердой фазы и молекулой, прибывающей из газовой фазы, образуется прочная химическая связь. Связывание физической адсорбцией намного слабее, так как она происходит под действием только сил Ван-дер-Ваальса. Связи физической адсорбции легко разрушаются тепловой энергией, когда местная температура выше температуры конденсации молекул.
По определению, реакционная зона реактора ALD включает все нагретые поверхности, которые могут подвергаться поочередному и последовательному воздействию каждого из прекурсоров ALD, используемых для осаждения тонких пленок. Основной цикл осаждения ALD включает четыре последовательных шага: импульс А, продувку А, импульс В и продувку В. Импульс А обычно включает подачу паров металлического прекурсора, а импульс В - паров неметаллического прекурсора, в частности паров азотного или кислородного прекурсора. Для удаления газовых побочных продуктов реакции, а также остаточных газовых молекул реагента из зоны реакции в ходе продувки А и продувки В используются инертный газ, например, азот или аргон, и вакуумный насос. Последовательность осаждения включает, по меньшей мере, один цикл осаждения. Циклы осаждения повторяются до тех пор, пока последовательность осаждения не даст тонкую пленку желаемой толщины.
Вещества-прекурсоры посредством хемосорбции образуют химическую связь с реакционно-активными участками нагретых поверхностей. Условия обычно подбираются таким образом, чтобы за один импульс прекурсора на поверхностях образовывалось не более монослоя молекул твердого материала. Таким образом, процесс роста является самоограниченным, или процессом с насыщением. Например, первый прекурсор может включать лиганды, которые остаются прикрепленными к адсорбированному веществу и насыщают поверхность, что предотвращает дальнейшую хемосорбцию. Температура реакционной зоны поддерживается выше температур конденсации и ниже температур термического разложения используемых прекурсоров, так что молекулы вещества прекурсора химически адсорбируются на подложке (подложках) существенно неповрежденными. «Существенно неповрежденными» означает, что из молекул прекурсора могут выходить летучие лиганды, когда молекулы вещества прекурсора химически адсорбируются на поверхности. Поверхность существенно насыщается реакционно-активными участками первого типа, т.е. адсорбированным веществом из молекул первого прекурсора. За этим шагом хемосорбции обычно следует шаг первой продувки (продувки А), в ходе которой из зоны реакции удаляются излишки паров первого прекурсора и возможные побочные парообразные продукты реакции. Затем в зону реакции вводятся пары второго прекурсора. Молекулы второго прекурсора обычно реагируют с адсорбированным веществом из молекул первого прекурсора, образуя при этом требуемый тонкопленочный материал. Этот рост заканчивается, когда употреблено все количество адсорбированного первого прекурсора и поверхность существенно насыщена реакционно-активными участками второго типа. Излишки паров второго прекурсора и возможные газообразные побочные продукты реакции удаляются затем на шаге второй продувки (продувки В). Далее цикл повторяется до тех пор, пока пленка не нарастет до нужной толщины. Циклы осаждения могут также быть и более сложными. Так, например, эти циклы могут включать три (или более) импульса паров реагентов, разделенных шагами продувки. Все эти циклы осаждения образуют временную последовательность осаждения, управляемую логическим устройством или микропроцессором.
Пленки, выращенные способом ALD, плотны, не имеют точечных проколов и однородны по толщине. Например, оксид алюминия, выращенный из триметилалюминия (CH3)3Al, называемого также ТМА, и воды при 250-300°С обычно имеет неоднородность около 1% на пластинке размером 100-200 мм. Тонкие пленки оксида металла, выращенные способом ALD, пригодны для использования в качестве диэлектриков затвора, изоляторов электролюминесцентного дисплея, конденсаторных диэлектриков и пассивирующих слоев. Тонкие пленки нитрида металла, выращенные способом ALD, пригодны для использования в качестве диффузионных барьеров, например, в двойных дамасских структурах.
Прекурсоры, подходящие для ALD-процессов в различных реакторах ALD, раскрыты, например, в обзорной статье R.Puurunen, "Surface chemistry of atomic layer deposition: A case study for the trimethylaluminium/water process", J. Appl. Phys., 97 (2005), p.121301, включенной в настоящее описание посредством ссылки.
В типовом реакторе циклы осаждения ALD производятся на одну пластинку или подложку. И хотя этот способ с единственной пластинкой может быть удовлетворителен для исследовательских целей, но он не удовлетворителен по таким, например, параметрам возможного массового производства, как производительность выхода изделий или среднее время между операциями обслуживания.
В поданной 27 мая 2008 г. и переуступленной тому же правопреемнику, что и настоящая заявка, патентной заявке US 12/154879, содержание которой включено в настоящее описание посредством ссылки, представлено решение, повышающее производительность реактора ALD. Согласно этому решению, партия подложек загружается в реактор с вертикальным потоком в держателе подложек, и для повышения производительности вся партия подложек в реакторе обрабатывается одновременно. Хотя это и представляет большой шаг по направлению к массовому производству, в сравнении с реакторами, обрабатывающими подложки по одной, тем не менее имеется потребность в еще большем повышении производительности.
Раскрытие изобретения
Согласно первому аспекту изобретения предлагается система реактора осаждения атомного слоя (ALD), включающая:
несколько реакторов ALD, расположенных относительно друг друга определенным образом, причем каждый из реакторов ALD приспособлен для приема партии подложек для ALD-обработки и включает реакционную камеру с верхним доступом и загрузочный робот, включающий захватную часть и устройство перемещения, при этом загрузочный робот приспособлен для выполнения нескольких процедур загрузки с целью загрузки каждого из реакторов ALD, а каждая процедура загрузки включает:
подхват захватной частью в зоне или на полке складирования держателя подложек, несущего партию подложек, и
перемещение устройством перемещения держателя подложек с партией подложек в реакционную камеру соответствующего реактора ALD.
В некоторых вариантах осуществления загрузочный робот приспособлен для опускания в каждой из процедур загрузки держателя подложек вертикально сверху в реакционную камеру без прохождения отдельной загрузочной камеры. Количество реакторов ALD в системе может составлять два, три или более.
В некоторых вариантах осуществления с помощью загрузочного робота загружается и выгружается заранее заряженная кассета с пластинами.
В некоторых вариантах осуществления подложками являются пластины полупроводника, в частности, кремниевые пластины, например, с размерами 3-12 дюймов.
В некоторых вариантах осуществления подложки включают от 10 до 100000 трехмерных частиц, таких, например, как металлические, стеклянные или кварцевые сферы размером 2-10 мм, при этом подложки в ходе процедур загрузки, осаждения и выгрузки находятся в заранее заряженной кассете.
В некоторых вариантах осуществления каждый из реакторов ALD включает систему крышек, включающую крышку реактора или вакуумной камеры, объединенную с крышкой реакционной камеры, и подъемное устройство для подъема упомянутой системы крышек с целью загрузки реакционной камеры.
В некоторых вариантах осуществления система реакторов ALD включает кожух с высокоэффективным воздушным фильтром (например, кожух с фильтром типа МЕРА), окружающий реакторы ALD, загрузочный робот и зону или полку складирования.
В некоторых вариантах осуществления загрузочный робот приспособлен, далее, для осуществления нескольких процедур разгрузки с целью разгрузки каждого из реакторов ALD после ALD-обработки, причем каждая процедура разгрузки включает подхват захватной частью в соответствующем реакторе ALD держателя подложек, несущего партию ALD-обработанных подложек, и перемещение устройством перемещения держателя подложек с партией ALD-обработанных подложек в зону или на полку складирования.
Согласно второму аспекту изобретения предлагается способ, включающий следующие шаги:
эксплуатируют несколько реакторов ALD, расположенных относительно друг друга определенным образом, причем каждый из реакторов ALD приспособлен для приема партии подложек для ALD-обработки и включает реакционную камеру с верхним доступом;
осуществляют несколько процедур загрузки загрузочным роботом для загрузки каждого из реакторов ALD, причем каждая процедура загрузки включает:
подхват в зоне или на полке складирования держателя подложек, несущего партию подложек, и
перемещение держателя подложек с партией подложек в реакционную камеру соответствующего реактора ALD.
В некоторых вариантах осуществления загрузочный робот в каждой из процедур загрузки опускает держатель подложек вертикально сверху в реакционную камеру без прохождения отдельной загрузочной камеры.
В некоторых вариантах осуществления способ включает установку кожуха с высокоэффективным воздушным фильтром (например, кожуха с фильтром типа НЕРА), окружающего реакторы ALD, загрузочный робот и зону или полку складирования.
В некоторых вариантах осуществления процедура загрузки выполняется только роботом без участия человека-оператора.
В некоторых вариантах осуществления способ, далее, включает выполнение загрузочным роботом нескольких процедур разгрузки с целью разгрузки каждого из реакторов ALD после ALD-обработки, причем каждая процедура разгрузки включает подхват в соответствующем реакторе ALD держателя подложек, несущего партию ALD-обработанных подложек, и перемещение держателя подложек с партией ALD-обработанных подложек в зону или на полку складирования.
Не во всех вариантах осуществления необходимо иметь несколько реакторов ALD, в некоторых вариантах осуществления достаточно одного реактора ALD. Соответственно, согласно еще одному аспекту изобретения предлагается система реактора осаждения атомного слоя (ALD), включающая:
реактор ALD, приспособленный для приема партии подложек для ALD-обработки и включающий реакционную камеру с верхним доступом, и
загрузочный робот, включающий захватную часть и устройство перемещения, причем загрузочный робот приспособлен для выполнения процедуры загрузки с целью загрузки реактора ALD, при этом процедура загрузки включает:
подхват захватной частью в зоне или на полке складирования держателя подложек, несущего партию подложек, и
перемещение устройством перемещения держателя подложек с партией подложек в реакционную камеру реактора ALD.
К преимуществам некоторых особенностей и/или вариантов осуществления настоящего изобретения относятся повышение производительности реакторов ALD, экономическая эффективность и сокращение времени загрузки (и разгрузки) реактора ALD.
Различные примерные варианты осуществления настоящего изобретения проиллюстрированы в нижеследующем подробном описании, а также в зависимых пунктах приложенной к описанию формулы изобретения. Эти варианты осуществления проиллюстрированы со ссылкой на отдельные особенности изобретения. Специалисту понятно, что любой вариант осуществления может быть скомбинирован с другим вариантом (вариантами) в рамках той же особенности. Далее, любой вариант осуществления может быть применен в рамках других особенностей, как самостоятельно, так и в комбинации с другим вариантом (вариантами).
Краткое описание чертежей
Ниже настоящее изобретение описывается - только для примера - со ссылкой на сопроводительные фигуры, на которых представлены:
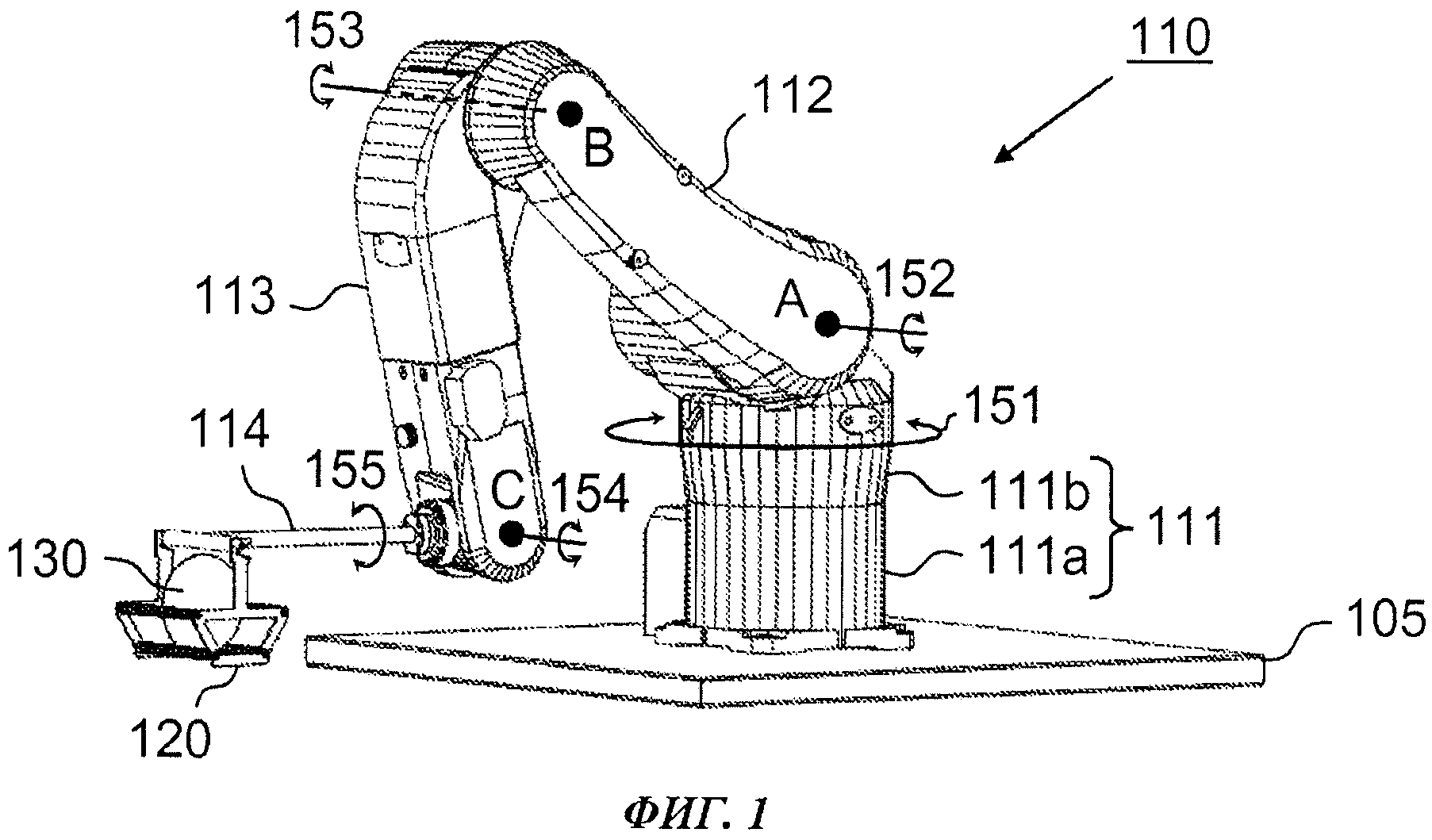
на ФИГ.1 - загрузочный робот системы реакторов ALD согласно одному из вариантов осуществления;
на ФИГ.2 - устройство захвата согласно одному из вариантов осуществления;
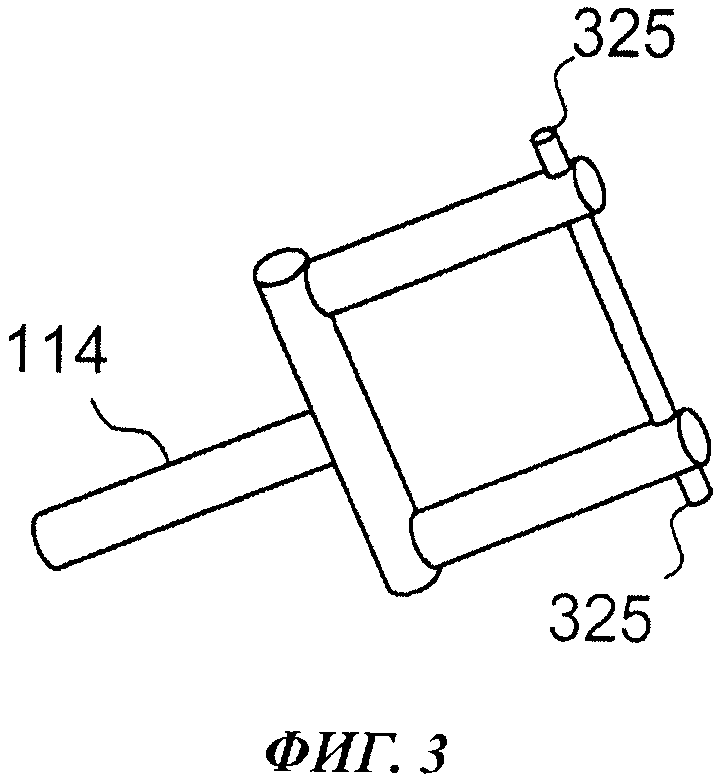
на ФИГ.3 - альтернативный вариант осуществления;
на ФИГ.4 - части системы реакторов ALD согласно одному из вариантов осуществления;
на ФИГ.5 - подъемный механизм согласно одному из вариантов осуществления; и
на ФИГ.6 - схема расположения системы реакторов ALD согласно одному из вариантов осуществления.
Осуществление изобретения
Основы механизма выращивания в способе ALD специалистам известны. К тому же детали способа ALD уже были освещены во вводной части описания. Здесь эти детали не повторяются, и в этом отношении делается ссылка на вводную часть.
На ФИГ.1 показан для примера загрузочный робот системы реакторов ALD согласно одному из вариантов осуществления. Загрузочный робот 110 прикреплен к основанию 105 и включает набор звеньев 111-114, соединенных друг с другом с возможностью поворота. Для обеспечения требуемого движения звенья 111-114 управляются компьютеризованной управляющей системой (не показана).
Загрузочный робот 110 прикреплен к основанию 105 нижней частью 111 а звена 111 на болтах или иным подходящим креплением. Верхняя часть 111b звена 111 и другие части загрузочного робота 110, прикрепленные к ней, имеют возможность вращения в горизонтальной плоскости, как показано стрелкой 151. Звено 112 прикреплено к звену 111 шарнирно и может поворачиваться вокруг оси вращения А, как показано стрелкой 152. Звено 113 прикреплено к звену 112 шарнирно и может поворачиваться вокруг оси вращения В, как показано стрелкой 153. Звено 114 прикреплено к звену 113 шарнирно и может поворачиваться вокруг оси вращения С, как показано стрелкой 154. Звено 114 может также вращаться вокруг собственной продольной оси, как показано стрелкой 155.
Звено 114, показанное на ФИГ.1 и в увеличенном масштабе - на ФИГ.2, включает Т-образную конструкцию для захвата держателя 120 подложек, несущего партию подложек 130. Партия, как правило, включает несколько вертикально расположенных подложек (т.е. подложек, поверхности которых образуют вертикальные плоскости), хотя на ФИГ.1 и 2 показана только одна подложка. Количество подложек в одной партии может варьироваться от десяти или нескольких десятков до сотен подложек, в зависимости от варианта осуществления и размера реактора ALD. Подложки могут быть расположены в держателе 120 подложек в ряд и, находясь в этом ряду, могут быть параллельны друг другу, как показано в документе US 12/154879. Подложки опираются на держатель 120 подложек. Для повышения эффективности использования реакционной зоны расстояния между подложками малы. Однако эти расстояния достаточно велики для того, чтобы поток прекурсора мог надлежащим образом входить в пространство между подложками. В некоторых вариантах осуществления эти существенно равномерные расстояния обычно выбираются в диапазоне 1-10 мм, в одном из вариантов - в диапазоне 2-5 мм.
Т-образная конструкция может, как показано на ФИГ.2, включать звено 114 и перпендикулярный к нему стержень 215. На обоих концах стержня 215 могут иметься выступы 225, входящие в соответствующие подъемные части или крюки 214 держателя 120 подложек. Эти выступы 225 и несут держатель подложек. В альтернативном варианте конец звена 114 может быть выполнен в форме, показанной на ФИГ.3, это альтернативная конструкция. В данном варианте осуществления звено 114 включает две пальцевидные части, соединенные друг с другом перпендикулярным к ним стержнем, причем этот стержень проходит сквозь пальцевидные части, так что его выступы 325 входят в соответствующие подъемные части или крюки 214 держателя 120 подложек. Возможны также и другие альтернативные конструкции звена 114, чтобы оно несло держатель 120 подложек, и они могут быть реализованы, в зависимости от варианта осуществления изобретения.
Материал держателя 120 подложек обычно включает нержавеющую сталь, никель, титан, карбид кремния (например, карбид кремния, полученный из графита химической инфильтрацией паров) или кварц. В одном из вариантов держатель 120 подложек перед вводом в употребление покрывается аморфной тонкой пленкой (например, пленкой Al2O3 толщиной 100-200 нм) для защиты поверхности держателя от действия вызывающих коррозию химикатов.
На ФИГ.4 показаны части системы реакторов ALD согласно одному из вариантов осуществления. Система включает первый шкаф 401 реактора ALD, содержащий первый реактор ALD 481. Реактор ALD 481 это реактор вертикального потока с верхним доступом, хотя возможны также и другие конструкции реактора ALD. В одном из вариантов осуществления реактор 481 включает вакуумную камеру, сформированную из трубной арматуры, например, из патрубка по стандарту ISO с двумя фланцами, соединенными с патрубком на болтах, или из фитинга по стандарту CF, или из аналогичной арматуры. Диаметр арматуры достаточно велик для размещения реакционной камеры с партией пластин размером 100-300 мм и нагревателями, соответственно конкретному варианту осуществления. В одном из вариантов осуществления крышка реактора выполнена так, что крышка 461 вакуумной камеры объединена с крышкой 462 реакционной камеры, образуя тем самым систему крышек. Эта система крышек может быть поднята и опущена подъемным механизмом 470. Подъемный механизм 470 может приводиться в действие пневмоцилиндром, а его перемещение управляться компьютером (не показан). В других вариантах осуществления вместо пневмоцилиндра в подъемном механизме может быть использован шаговый электродвигатель.
Система, показанная на ФИГ.4, включает, далее, второй шкаф 402 реактора ALD, содержащий второй реактор ALD, который может быть аналогичен реактору ALD 481 (но на ФИГ.4 показана только его крышка), и загрузочный робот 110, размещенный между реакторами ALD. Загрузочный робот 110 прикреплен к основанию, которое в примере, показанном на ФИГ.4, образует шкаф 410. Один загрузочный робот 110 обслуживает (загружает и разгружает) оба упомянутых реактора ALD, однако в альтернативном варианте осуществления система реакторов ALD может включать только один реактор ALD вместо двух.
В примере, показанном на ФИГ.4, загрузочный робот 110 в изображенный момент загружает реактор ALD 481. В одном из вариантов осуществления реактор ALD 481 переводится с давления осаждения (обычно 1-10 гПа) на комнатное давление (обычно 950-1050 гПа). Одновременно загружается партия подложек. Крышка (или объединенная система крышек) реактора ALD 481 поднята подъемным механизмом 470 в верхнее положение, открывая внутреннее пространство реакционной камеры. Более наглядно это показано на ФИГ. 5, на которой позицией 585 обозначено внутреннее пространство реакционной камеры.
Загрузочный робот 110 получает или захватывает держатель 120 подложек, несущий партию подложек для ALD-обработки, на загрузочной станции (загрузочное пространство/зона или стеллаж/полка складирования не показаны). На практике загрузочный робот 110 может захватывать держатель 120 подложек своей захватной частью или звеном 114, имеющим соответствующий выступ (соответствующие выступы) 225 или 325 - или аналогичные. Движения загрузочного робота 110 управляются компьютеризованной управляющей системой (не показана), благодаря чему образуется подвижное приспособление для перемещения держателя 120 подложек с подложками 130. Загрузочный робот 110 переносит держатель 120 подложек с партией подложек 130 от загрузочной станции к реактору ALD 481. В непосредственной близости от реактора ALD 481 загрузочный робот 110 переносит держатель 120 подложек, в основном, в горизонтальном направлении над отверстием, ведущим в реакционную камеру. Вслед за тем загрузочный робот 110 опускает держатель 120 подложек с партией подложек130, в основном, в вертикальном направлении на дно реакционной камеры. После этого загрузочный робот 110 освобождает захват держателя 120 подложек и выводит звено 114 из реактора наружу. Крышка реактора опускается в положение закрытия подъемным механизмом 470. Производится откачка реакционной камеры от комнатного до вакуумного давления. Производится регулировка давления процесса потоком инертного газа, например азота, обычно до давления 1-10 гПа. Температура подложек может быть стабилизирована на уровне температуры процесса (обычно лежащей в приблизительном диапазоне от +80 до +500°С) внутри реакционной камеры (ее горячих стенок).
Первый реактор ALD 481 выполняет ALD-обработку (включая требуемое количество циклов осаждения ALD) загруженной партии подложек 130. После ALD-обработки реакционная камера доводится до комнатного давления, крышка реактора поднимается подъемным механизмом 470 в верхнее положение, и загрузочный робот 110 выгружает держатель 120 подложек с партией ALD-обработанных подложек 130 из реактора ALD. Загрузочный робот 110 переносит держатель 120 подложек с упомянутой партией подложек 130 к разгрузочной станции (которая может совпадать или не совпадать с вышеупомянутой загрузочной станцией). Операции загрузки и разгрузки могут выполняться одним загрузочным роботом 110. Для выполнения надлежащей последовательности операций может осуществляться обмен информацией между соответствующими электронными устройствами реактора (реакторов) ALD и загрузочным роботом.
Загрузка и разгрузка второго и любых последующих реакторов ALD системы выполняется аналогично. Сначала, до запуска ALD-обработки в любом из реакторов, могут быть загружены все реакторы ALD. В альтернативном варианте загрузочный робот 110 может загружать или разгружать определенные реакторы ALD, в то время как прочие обслуживаются по соответствующему рабочему графику.
На ФИГ.6 показана схема расположения системы реакторов ALD согласно одному из вариантов осуществления. Система включает несколько реакторов ALD в некоторой схеме взаиморасположения. В данном примере количество реакторов -три, и поэтому схема их взаиморасположения представляет собой треугольник. Все реакторы ALD 601, 602 и 603 обслуживает единственный загрузочный робот 110. Этот робот 110 подхватывает в зоне или на стеллаже 606 складирования заранее заряженный держатель (или кассету) 120 подложек для загрузки его в реакторы 601-603, а после ALD-обработки возвращает держатель на его место и подхватывает следующий заранее заряженный держатель.
В одном из вариантов осуществления зона или стеллаж 606 складирования включает управляемый компьютером позиционирующий стол, например стол с направляющими, с целью придания держателю (держателям) подложек оптимального положения для манипуляций загрузочного робота.
В данном варианте осуществления (хотя это может быть применено и в других вариантах осуществления) предусмотрен кожух 690 с высокоэффективным воздушным фильтром (МЕРА), окружающий систему реакторов ALD (реакторы, загрузочный робот и зону или полку складирования) для защиты реакторов и держателя (держателей) подложек от попадания загрязняющих частиц. Таким образом может быть создано локальное «чистое помещение». В одном из вариантов осуществления чистый воздух направляется от потолка кожуха к полу, благодаря чему создается преимущественно ламинарный воздушный поток. Такое локальное «чистое помещение» может быть создано, например, внутри большего помещения. Операции загрузки, ALD-обработки и разгрузки выполняются загрузочным роботом и реактором (реакторами) ALD в упомянутом локальном «чистом помещении» без присутствия в этом локальном «чистом помещении» человека-оператора.
Выше были представлены различные варианты осуществления изобретения. Следует понимать, что все содержащиеся в настоящем документе, включенные и входящие в него слова употреблены в качестве неисчерпывающих выражений, не предполагающих наложение каких-либо ограничений.
Вышеприведенное описание дано на неограничивающих примерах конкретных вариантов реализации и осуществления изобретения - для представления полного и информативного описания метода выполнения изобретения, который изобретатели считают в настоящее время наилучшим. Но специалисту, тем не менее, понятно, что изобретение не ограничивается деталями вышеприведенных вариантов осуществления и может быть реализовано в других вариантах осуществления, использующих эквивалентные средства, без отступления от характеристик настоящего изобретения.
Некоторые особенности раскрытых выше вариантов осуществления изобретения могут быть с успехом использованы без соответствующего использования других особенностей. Таким образом, вышеприведенное описание следует рассматривать лишь в качестве иллюстрации принципов изобретения, а не его ограничений. Соответственно, объем изобретения ограничен только объемом прилагаемой формулы изобретения.
Реферат
Изобретение относится к устройству для осаждения атомного слоя и к способу загрузки этого устройства. Устройство содержит реакторы ALD, каждый из которых выполнен с возможностью приема партии подложек для ALD-обработки и включает реакционную камеру с верхней загрузкой, систему крышек, подъемное устройство для подъема системы крышек для загрузки реакционной камеры, и загрузочный робот. Загрузочный робот включает захватную часть и устройство перемещения, при этом загрузочный робот выполнен с возможностью осуществления нескольких операций загрузки для загрузки каждого из реакторов ALD. Каждая операция загрузки включает подхват захватной частью в зоне или на полке складирования держателя подложек c партией подложек, перемещение устройством перемещения держателя подложек с партией подложек в реакционную камеру соответствующего реактора ALD и опускание упомянутого держателя подложек вертикально сверху в соответствующую реакционную камеру. Повышается автоматизация устройства и его производительность. 3 н. и 12 з.п. ф-лы, 6 ил.
Формула
реакторы ALD, каждый из которых выполнен с возможностью приема партии подложек для ALD-обработки и включает реакционную камеру с верхней загрузкой, систему крышек, подъемное устройство для подъема системы крышек для загрузки реакционной камеры, и
загрузочный робот, включающий захватную часть и устройство перемещения, при этом загрузочный робот выполнен с возможностью осуществления нескольких операций загрузки для загрузки каждого из реакторов ALD, а каждая операция загрузки включает:
подхват захватной частью в зоне или на полке складирования держателя подложек с партией подложек,
перемещение устройством перемещения держателя подложек с партией подложек в реакционную камеру соответствующего реактора ALD и
опускание упомянутого держателя подложек вертикально сверху в соответствующую реакционную камеру.
эксплуатируют реакторы ALD, каждый из которых выполнен с возможностью приема партии подложек для ALD-обработки и включает реакционную камеру с верхней загрузкой, систему крышек и подъемное устройство для подъема указанной системы крышек для загрузки реакционной камеры,
осуществляют несколько операций загрузки посредством загрузочного робота для загрузки каждого из реакторов ALD, причем каждая операция загрузки включает:
подхват в зоне или на полке складирования держателя подложек с партией подложек,
перемещение держателя подложек с партией подложек в реакционную камеру соответствующего реактора ALD и
опускание упомянутого держателя подложек вертикально сверху в соответствующую реакционную камеру.
реактор ALD, выполненный с возможностью приема партии подложек для ALD-обработки и включающий реакционную камеру с верхней загрузкой, систему крышек, подъемное устройство для подъема системы крышек для загрузки реакционной камеры, и
загрузочный робот, включающий захватную часть и устройство перемещения, причем загрузочный робот выполнен с возможностью осуществления операции загрузки для загрузки реактора ALD, при этом операция загрузки включает:
подхват захватной частью в зоне или на полке складирования держателя подложек с партией подложек,
перемещение устройством перемещения держателя подложек с партией подложек в реакционную камеру реактора ALD и
опускание упомянутого держателя подложек вертикально сверху в соответствующую реакционную камеру.
Комментарии