Трансмиссионное устройство - RU2461487C2
Код документа: RU2461487C2
Чертежи




Описание
1. Область техники
Настоящее изобретение относится к трансмиссионному устройству велосипеда с механическим приводом, в частности к устройству передачи мощности, имеющему блок механического привода и тормозной механизм, которые расположены коаксиально.
2. Описание предшествующего уровня техники
Общепризнанна проблема энергетических ресурсов. С целью снижения расхода нефтепродуктов большим спросом пользуются транспортные средства с механическим приводом или управляемые мускульной силой человека. В частности, велосипед недорог и может обеспечить эффект велотренажера. В настоящее время езда на велосипеде является популярным занятием.
Велосипед, управляемый мускульной силой человека, приспособлен для короткой дистанции или для использования на досуге, но не для больших дистанций.
Вследствие этого на рынке представлен велосипед с механическим приводом, имеющий электромотор. Когда велосипедист устает, он/она могут включить режим механического привода, с тем чтобы использовать велосипед на большом расстоянии. Однако в моторах с механическим приводом и тормозных механизмах велосипеда с механическим приводом используется конструкция других машин. Мотор с механическим приводом и тормозной механизм расположены эксцентрично, что требует большего конфигурационного пространства и ограничивает позицию монтажа.
Обычно мотор с механическим приводом и тормозной механизм расположены между валом заднего колеса и задней опорой. Таким образом, велосипед не может сохранять свою балансировку, а мотор с механическим приводом и тормозной механизм занимают большую часть пространства. Кроме того, опорная площадь торсиона эксцентрического тормозного механизма ограничена. После определенного периода времени редуктор сильно изнашивается, что приводит к нарушению нормальной работы.
Таким образом, изобретатель настоящего изобретения посвятил себя, основываясь на своем многолетнем практическом опыте, решению вышеназванных проблем, связанных с традиционным велосипедом с механическим приводом, и разработке совершенного и практичного трансмиссионного устройства.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Главной целью настоящего изобретения является обеспечение электромотором и тормозным механизмом, которые размещены на вращающемся валу (торсионном валу), соединенном с рычагами педали, что уменьшит конфигурационное пространство и сохранит балансировку велосипеда.
Поставленная задача достигается трансмиссионным устройством, содержащим приводной механизм, размещенный на валу, который расположен между двумя рычагами педалей велосипеда.
Приводной механизм предусматривает источник физической силы человека или источник электроэнергии для приведения велосипеда в движение.
При помощи вышеназванного технического средства блок механического привода приводит в движение силовую ось и передает мощность первому храповому механизму через блок торможения так, чтобы зацепить зубчатое колесо для поступательного движения велосипеда. Когда зубчатое колесо повернуто, второй храповый механизм не будет приводить в движение вращающийся вал (торсионный вал) рычагов педалей. И наоборот, когда рычаги педалей нажаты, чтобы привести в движение вращающийся вал и сцепить второй храповый механизм, чтобы повернуть зубчатое колесо, первый храповый механизм не будет приводить в движение блок торможения и блок механического привода.
Таким образом, блок механического привода и рычаги педалей управляются раздельно, не влияя друг на друга. Как силовая ось блока механического привода, так и выходная ось блока торможения являются полыми штангами. Вращающийся вал рычагов педалей вставлен прямо через блок механического привода и блок торможения. Такая коаксиальная конфигурация требует меньшего пространства. Блок механического привода и блок торможения размещены прямо на вращающемся валу рычагов педалей, чтобы еще больше увеличить пространство для использования и сохранить балансировку.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ (СХЕМ)
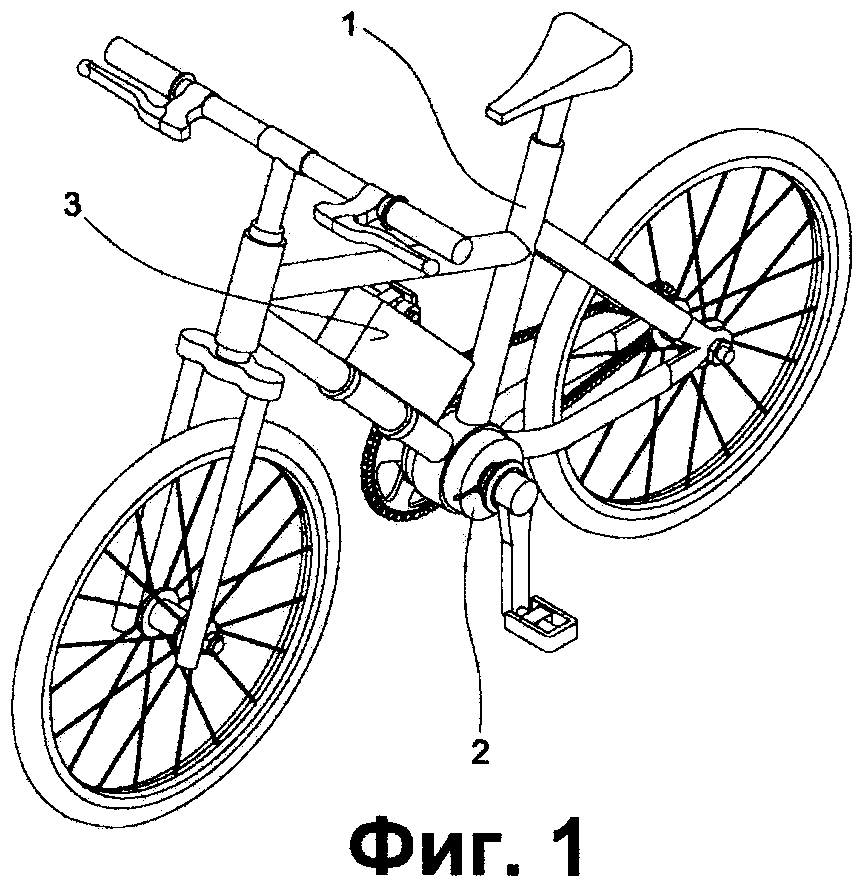
Фиг.1 представляет собой вид в перспективе настоящего изобретения;
Фиг.2 представляет собой частично перспективный вид, показывающий силовой механизм настоящего изобретения;
Фиг.3 представляет собой изображение силового механизма настоящего изобретения в разобранном виде;
Фиг.4 представляет собой еще одно изображение силового механизма настоящего изобретения в разобранном виде;
Фиг.5 представляет собой изображение блока механического привода настоящего изобретения в разобранном виде;
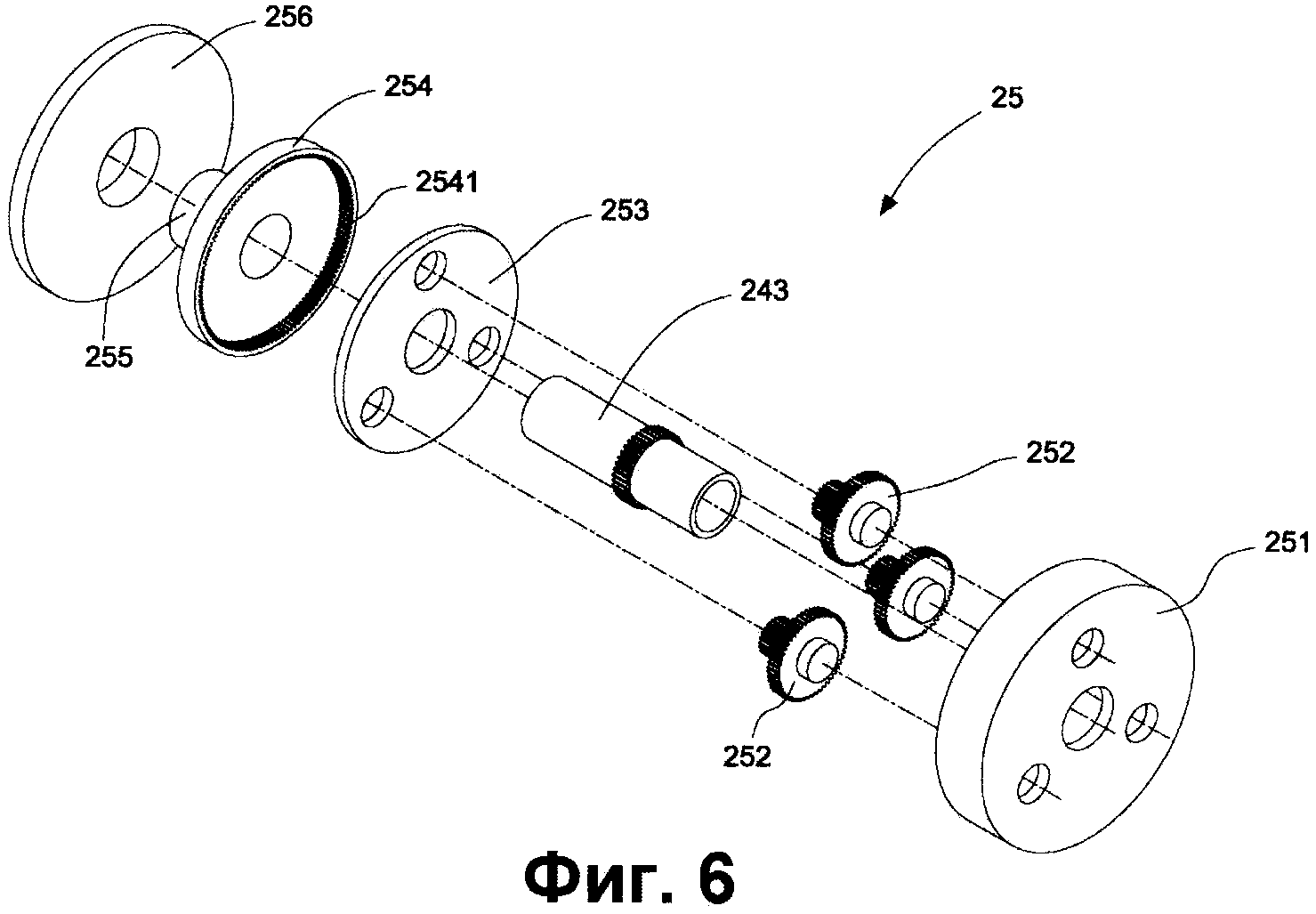
Фиг.6 представляет собой изображение блока торможения настоящего изобретения в разобранном виде; и
Фиг.7 представляет собой еще одно изображение блока торможения настоящего изобретения в разобранном виде;
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВОПЛОЩЕНИЙ
Реализации настоящего изобретения будут здесь описаны только в качестве примера со ссылкой на прилагаемые фигуры.
Как показано на Фиг.1 и Фиг.2, трансмиссионное устройство настоящего изобретения включает в себя раму 1, приводной механизм 2 и энергосберегающий блок 3. Нижняя часть рамы 1 оснащена втулкой 11. Приводной механизм 2 вмонтирован во втулку 11. Энергосберегающий блок 3 закреплен на раме 1 и электрически соединен с приводным механизмом 2.
Как показано на Фиг.3 и Фиг.4, приводной механизм 2 содержит вращающийся вал 21 (торсионный вал), два рычага педалей 22, боковую крышку 23, блок 24 механического привода, блок 25 торможения, зубчатое колесо 26, первый храповый механизм 27, второй храповый механизм 28 и соединительное кольцо 29.
Вращающийся вал 21 представляет собой цилиндрическую штангу.
Каждый рычаг 22 педалей имеет один конец, соединенный с дальним концом вращающегося вала 21, и другой конец, соединенный с педалью. Два конца вращающегося вала 21 соединены с двумя рычагами 22 педалей соответственно.
Боковая крышка 23 представляет собой круглую пластину, установленную на вращающемся валу 21. Наружная часть боковой крышки 23 прикреплена к рычагу 22 педали, а внутренняя часть боковой крышки 23 оснащена рядом сенсорных пластин 231, как показано на Фиг.4.
Блок 24 механического привода, как показано на Фиг.3 и Фиг.5, содержит статор 241 и ротор 242. Ротор 242 содержит полую силовую ось 243, выходящую из ротора 242. Вращающийся вал 21 вставлен через силовую ось 243 блока 24 механического привода. Один конец статора 241 обращен к боковой крышке 23. Внешняя поверхность статора 241 оснащена сенсорным элементом 244, чтобы обнаружить сенсорные пластины 231. Блок 24 механического привода имеет цепь, соединенную с энергосберегающим блоком 3.
Блок 25 торможения, показанный на Фиг.6 и Фиг.7, содержит корпус 251, установленный на силовой оси 243. Множество планетарных передач 252 помещены в корпусе 251 и расположены вокруг силовой оси 243, так чтобы входить в зацепление с силовой осью 243. Планетарные передачи 252 проходят через позиционирующую панель 253 и закреплены на ней. Силовая ось 243 далее вставлена через зубчатое кольцо 254. Одна сторона зубчатого кольца 254 имеет кольцевые внутренние зубцы 254 для зацепления с планетарными передачами 252. Другая сторона зубчатого кольца 254 имеет выходную ось 255. Крышка 256 приспособлена, чтобы закрывать передачи в корпусе 251. Крышка 256 имеет отверстие для выходной оси 255, которая проходит сквозь него.
Зубчатое колесо 26 установлено на вращающемся валу 21 и имеет камеру 261 в центральной его части, как показано на Фиг.4.
Первый храповый механизм 27 состоит из детали 271 упора (фиксатора) и детали 272 сцепления. Первый храповый механизм 27 установлен на вращающемся валу 21 и размещен в камере 261. Деталь 271 упора входит в контакт (сцепляется) с выходной осью 255, и зацепляющая часть 272 входит в контакт (сцепляется) с внутренней стенкой камеры 261 так, чтобы передавать мощность одностороннего вращения.
Второй храповой механизм 28 состоит из детали 281 упора (фиксатора) и детали 282 сцепления. Второй храповой механизм 28 установлен на вращающемся валу 21 и размещается в камере 261. Зацепляющая часть 282 входит в контакт (сцепляется) с внутренней стенкой камеры 261 так, чтобы передавать мощность одностороннего вращения.
Соединительное кольцо 29 представляет собой кольцевой соединительный блок, установленный на вращающемся валу 21. Соединительное кольцо 29 имеет одну концевую часть, соединенную с деталью 281 упора второго храпового механизма 28, а другую концевую часть - соединенную с рычагом 22 педалей.
Блок механического привода 24 использует электрическую мощность от энергосберегающего блока 3, чтобы приводить в движение силовую ось 243. Силовая ось 243 приводит в движение передачи в блоке 25 торможения, а выходная ось 255 выдает мощность первому храповому механизму 27, чтобы поворачивать зубчатое колесо 26. В это время второй храповый механизм 28 не будет приводить в движение рычаги 22 педалей и вращающийся вал 21. И наоборот, когда рычаги 22 педали нажаты, чтобы привести в движение вращающийся вал 21 и соединительное кольцо 29, второй храповый механизм 28 будет поворачивать зубчатое колесо 26. В это время первый храповый механизм 27 не будет приводить в движение выходную ось 255.
Соответственно, пользователь может выбирать рычаги 22 педалей или блок 24 механического привода в качестве источника мощности. Они оба приводятся в действие раздельно, не препятствуя друг другу.
Предпочтительно, сенсорный элемент 244 обнаруживает сенсорные пластины 231, чтобы измерять скорость вращения рычагов 22 педалей. При помощи программы блок 24 механического привода может быть активирован автоматически, например, когда скорость вращения рычагов 22 педали низкая, блок 24 механического привода будет активирован в качестве источника мощности. Вращающийся вал 21 установлен прямо через блок 24 механического привода и блок 25 торможения. Такая коаксиальная конфигурация требует меньшего пространства и сохраняет балансировку велосипеда.
Кроме того, в блоке торможения 25 используется множество планетарных передач 252, чтобы передавать мощность, распределяя сильное кручение от силовой оси 243, с тем, чтобы увеличить верхний предел величины несущей способности торсиона. Настоящее изобретение предоставляет устойчивую конструкцию без шума.
Подводя итоги, скажем, что настоящее изобретение может уменьшить конфигурационное пространство, сохранить балансировку велосипеда, увеличить полезное пространство, повысить срок службы, и оно бесшумно.
Хотя конкретные (отдельные) воплощения настоящего изобретения описаны детально с целью иллюстрации, различные модификации и расширение функциональных возможностей могут быть сделаны, не выходя за пределы существа и объема изобретения. Соответственно, настоящее изобретение не должно ограничиваться, за исключением прилагаемых формул изобретения.
Реферат
Изобретение относится к приводу велосипеда со вспомогательным электродвигателем в каретке. Внешняя поверхность статора снабжена сенсорным элементом (244) для измерения скорости вращения кривошипов (22). Соответствующие сенсорные пластины (231) установлены на внутренней части боковой крышки (23), наружная часть которой прикреплена к кривошипу (22) педали. Полая силовая ось (243) ротора связана со звездочкой (26) через планетарный редуктор (25) и первый храповик (27). Кривошипный вал (21) проходит сквозь полую силовую ось (243) ротора и связан со звездочкой (26) через второй храповик (28). Решение направлено на обеспечение компактности привода с возможностью автоматического начала работы электродвигателя при снижении скорости вращения кривошипов. 8 з.п. ф-лы, 7 ил.
Комментарии