Система измерения тягового усилия трехточечной сцепки - RU2682886C1
Код документа: RU2682886C1
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Предложенное изобретение относится к системе измерения тягового усилия.
УРОВЕНЬ ТЕХНИКИ
Сельскохозяйственные орудия можно устанавливать непосредственно на сельскохозяйственные тракторы с использованием общепринятой трехточечной сцепки. Трехточечными сцепками управляют с помощью системы управления сцепкой, которая поднимает и опускает сцепку в ответ на ряд измеренных параметров, включая измеренное тяговое усилие. Подобные системы могут функционировать, опуская и поднимая орудие, сохраняя в то же время постоянную нагрузку на трактор. Фактически орудие способно работать на более глубокой средней глубине, так как трактор с данной системой управления способен работать с более высокой средней мощностью. Для предоставления сигнала измеренного тягового усилия было разработано множество систем измерения тягового усилия. Некоторые выпускаемые в настоящее время системы измерения тягового усилия имеют ряд движущихся деталей, которые требуют периодического технического обслуживания, включая удаление накоплений грязи и грунта и смазывание плунжера датчика усилия для предотвращения попадания влаги и грязи. В некоторых условиях, скапливание грязи и грунта фактически препятствует перемещению составных элементов, что вызывает ошибочные сигналы измерения тягового усилия. Изменения конструкции рамы трактора будут требовать новых конструкций для измерения тягового усилия.
Некоторые производственные системы имеют дорогостоящие штифты измерения тягового усилия, гнущиеся стержни и валы с датчиком тягового усилия. Штифты измерения тягового усилия требуют двух инструментальных штифтов, которые удваивают стоимость и уполовинивают надежность. Системы гнущихся стержней и валов с датчиками тягового усилия имеют движущиеся детали и требуют изолированного отсека и значительного объема пространства. Нулевое напряжение нагрузки для системы устанавливают за счет регулирования длины пружинной стальной накладки, которую устанавливают над плунжером датчика и концы которой прикрепляют к корпусу вала. Завод постоянно имеет проблемы установки напряжения. Пружинная стальная накладка и плунжер датчика создают несовместимое напряжение во время регулирования пружинной стальной накладки. Существующая в настоящее время система измерения тягового усилия на тракторах с четырьмя ведущими колесами измеряет отклонение между монтажными накладками продольных тяг. Компоненты открыты для окружающих условий и подвержены воздействию грунта, грязи и мусора.
Необходимо предоставить систему измерения тягового усилия, которую можно устанавливать внутри пространства, доступного в будущем при производстве тракторов. Также необходимо предоставить систему измерения тягового усилия, которая лучше защищена от загрязнений окружающей среды. Необходимо иметь систему, которая является герметичной и менее склонна к скапливанию мусора.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Согласно аспекту предложенного изобретения, транспортное средство содержит левую и правую продольные тяги для соединения орудия с рамой сцепки. Система измерения тягового усилия содержит пару неравнобоких уголков, соединенных между продольными тягами и сенсорным блоком. Сенсорный блок содержит корпус и первый и второй разнесенные шарнирные пальцы, установленные в корпусе. Первый рычаг шарнирно установлен на первом шарнирном пальце. Первый рычаг имеет первую часть, передвигаемую одним из неравнобоких уголков в ответ на тяговое усилие, прикладываемое к левой продольной тяге, и вторую часть. Второй рычаг шарнирно установлен на втором шарнирном пальце. Второй рычаг имеет первую часть, передвигаемую другим неравнобоким уголком в ответ на тяговое усилие, прикладываемое к правой продольной тяге, и вторую часть. Упругий элемент соединен с первым и вторым рычагами и смещается, поджимая рычаги друг к другу. Между рычагами расположен стопорный элемент, который может входить в зацепление с рычагами, ограничивая перемещение рычагов друг к другу. Со вторыми частями первого и второго рычагов входит в зацепление измерительный преобразователь. Измерительный преобразователь генерирует электрический сигнал, указывающий расстояние между вторыми частями.
Данная система измерения тягового усилия механически суммирует горизонтальную тяговую нагрузку между двумя нижними продольными тягами трехточечной сцепки. Две нижние продольные тяги соединены с частями рамы сцепки, которые являются гибкими в ответ на горизонтальные нагрузки и являются жесткими в ответ на вертикальные нагрузки. Конструкция рамы сцепки и размещение неравнобоких уголков делает максимальным сигнал горизонтальной тяги и делает минимальным сигнал вертикальной нагрузки. Система измерения тягового усилия требует очень небольшого пространства и не требует периодического смазывания и технического обслуживания. Рамой сцепки является литое изделие, которое отклоняется в ответ на тяговую нагрузку. Данное отклонение передается на два неравнобоких уголка, установленных на раме сцепки. Неравнобокие уголки имеют концы, которые поворачиваются вследствие отклонения и скручивания рамы сцепки. Концы неравнобоких уголков толкают два круглых болта с головками, которые соединены с рычажным узлом в сенсорном блоке. Рычажный узел содержит поворотные рычаги, которые увеличивают отклонение. Измерительный преобразователь установлен между рычагами, и давление на него увеличивается или уменьшается в зависимости от тяговой нагрузки, прикладываемой к раме сцепки. Данная система механически суммирует вместе тяговую нагрузку от обеих нижних продольных тяг, так что требуется только единственный измерительный преобразователь, повышая таким образом надежность системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
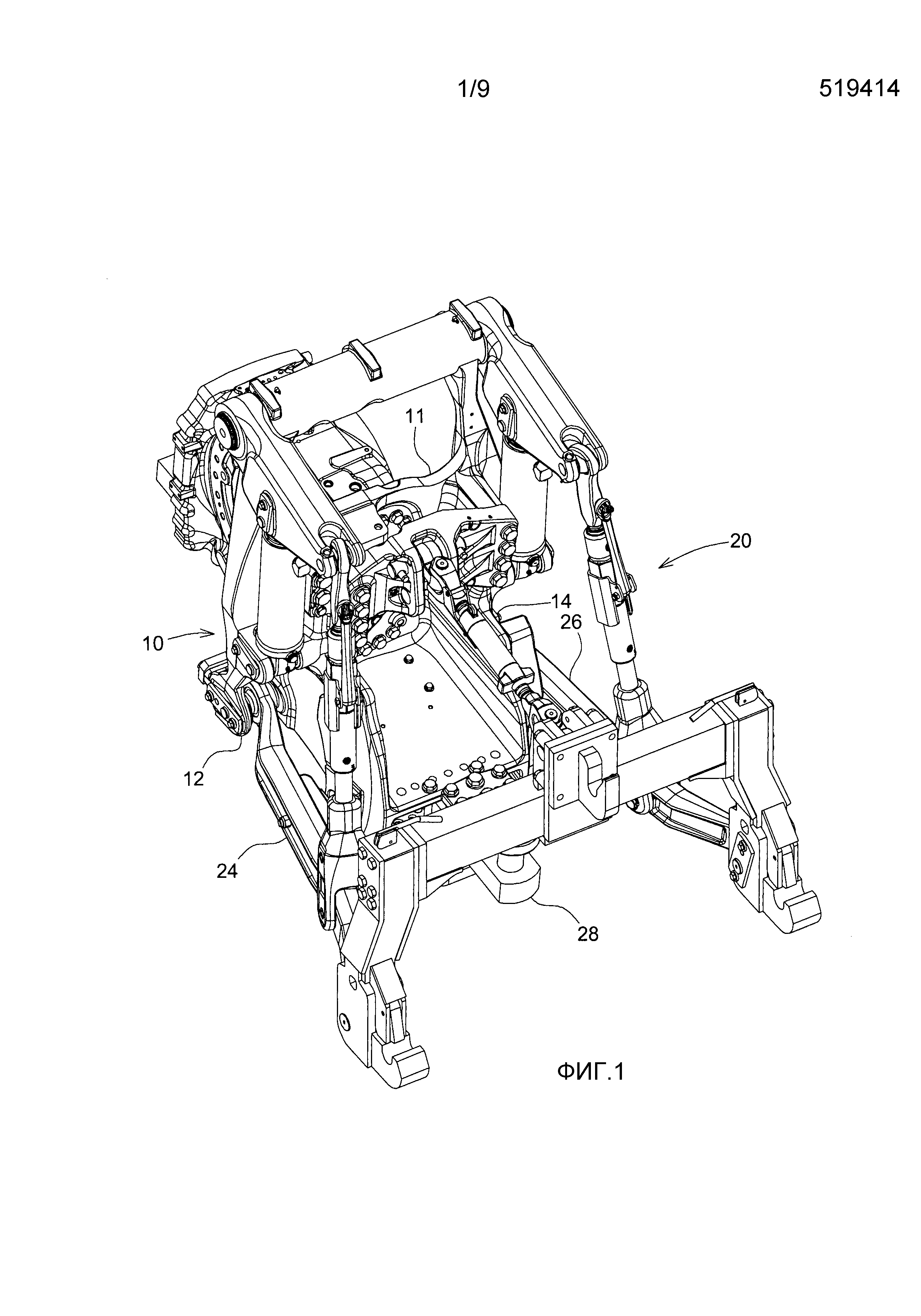
Фиг. 1 представляет собой перспективный вид сзади рамы сцепки трактора и трехточечной сцепки;
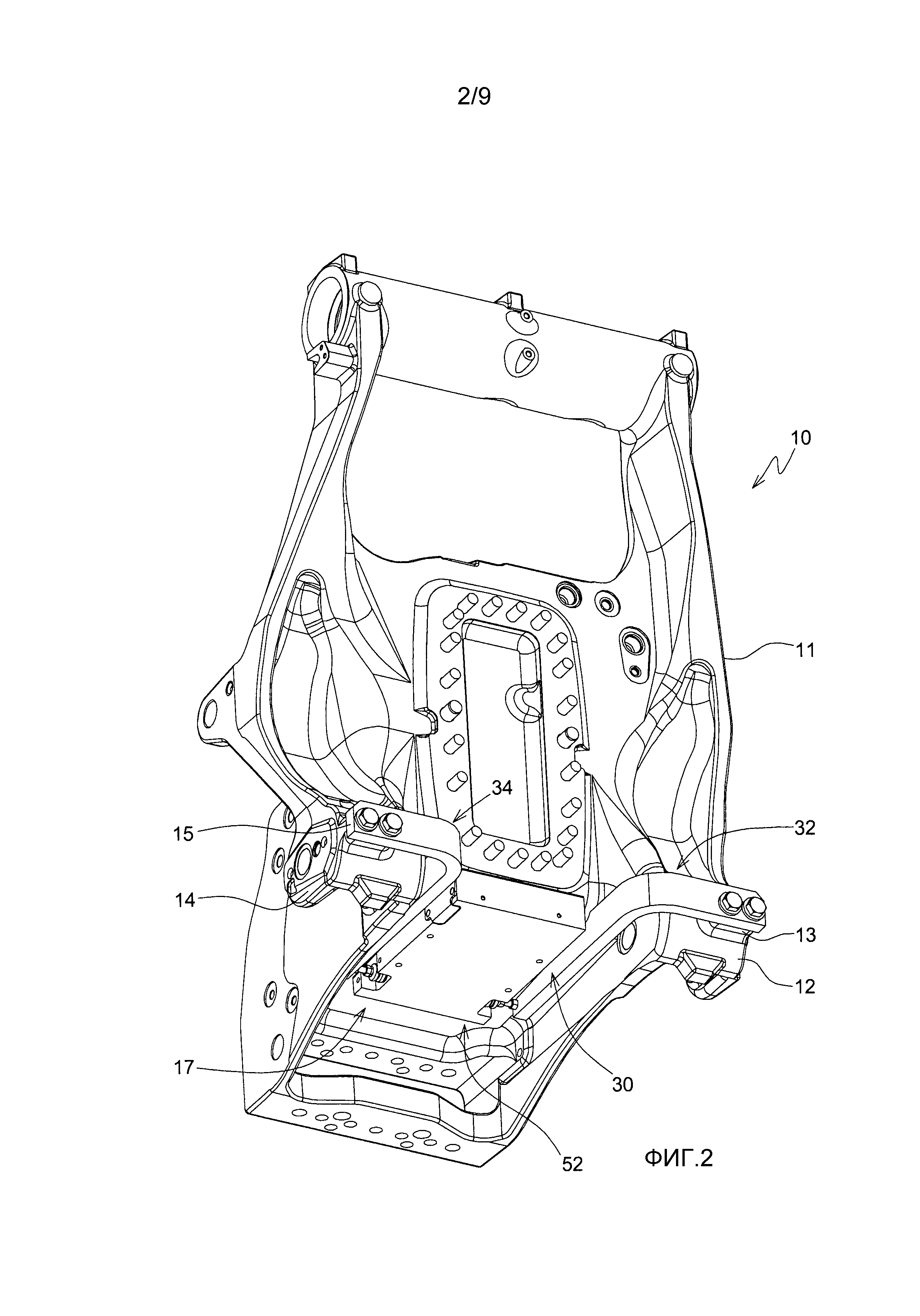
Фиг. 2 представляет собой перспективный вид снизу спереди рамы сцепки трактора и механизма измерения тягового усилия согласно изобретению;
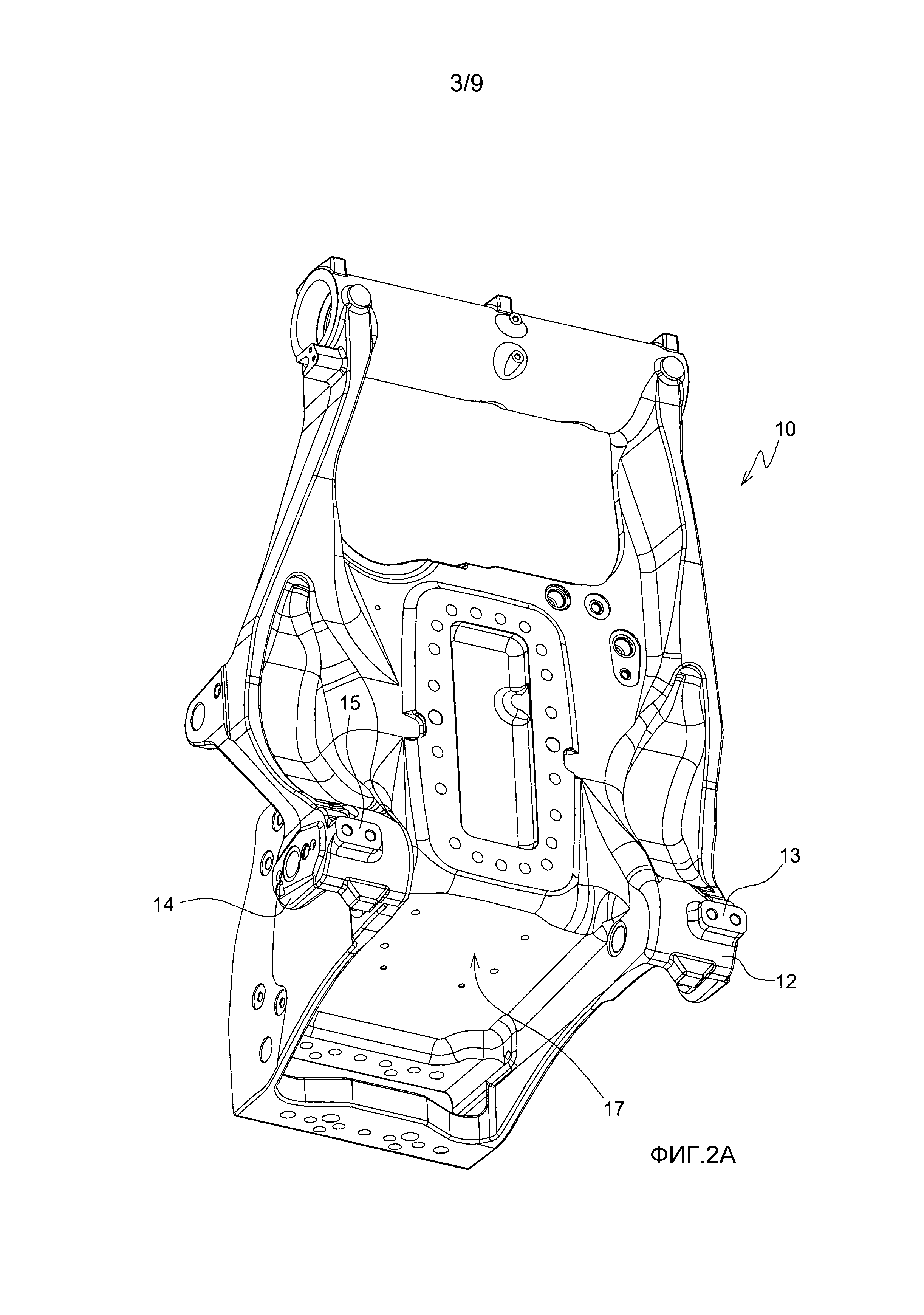
Фиг. 2А представляет собой перспективный вид снизу спереди рамы сцепки трактора с удаленным механизмом измерения тягового усилия;
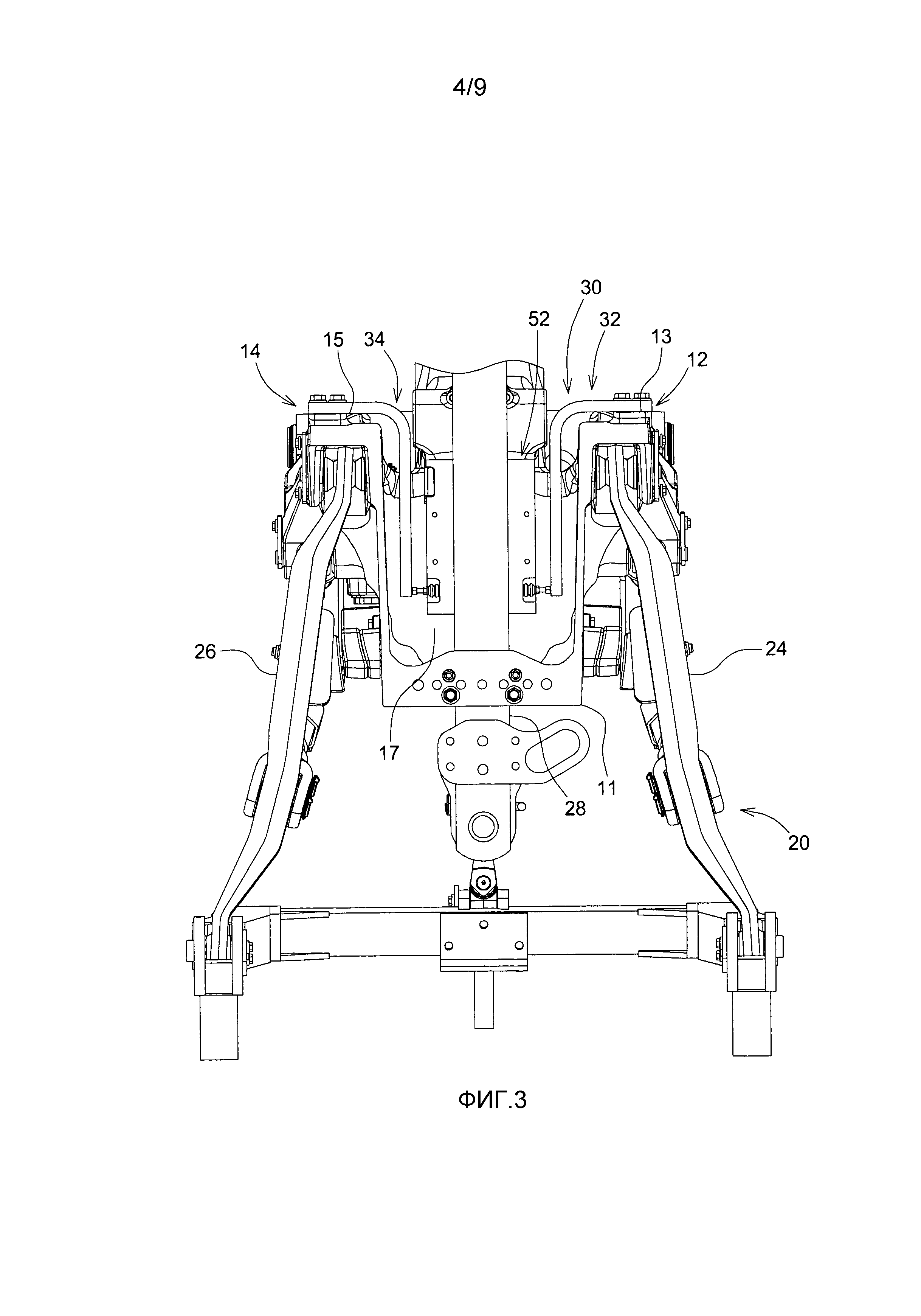
Фиг. 3 представляет собой вид снизу конструкции, показанной на Фиг. 1;
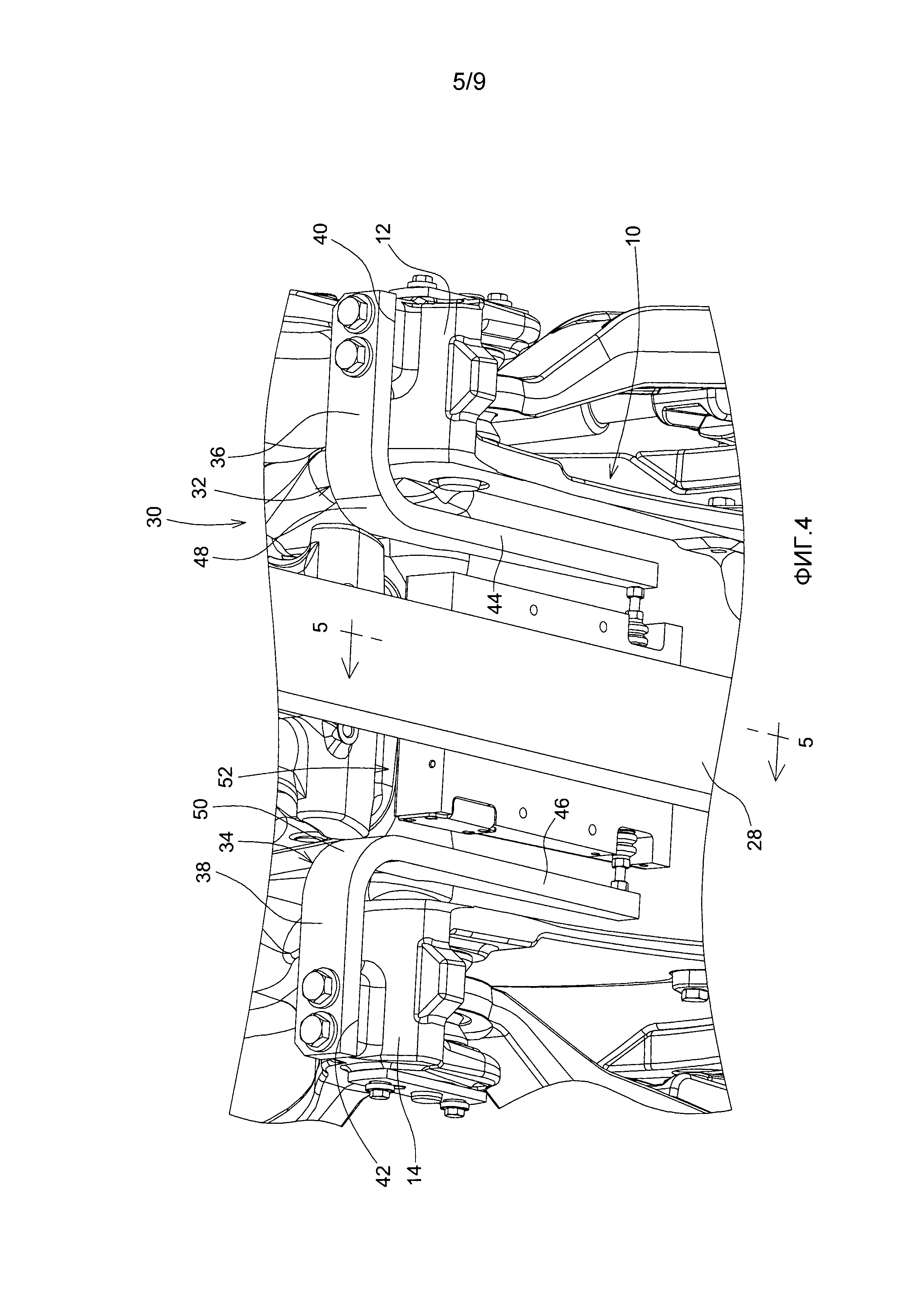
Фиг. 4 представляет собой перспективный вид снизу части по Фиг. 4;
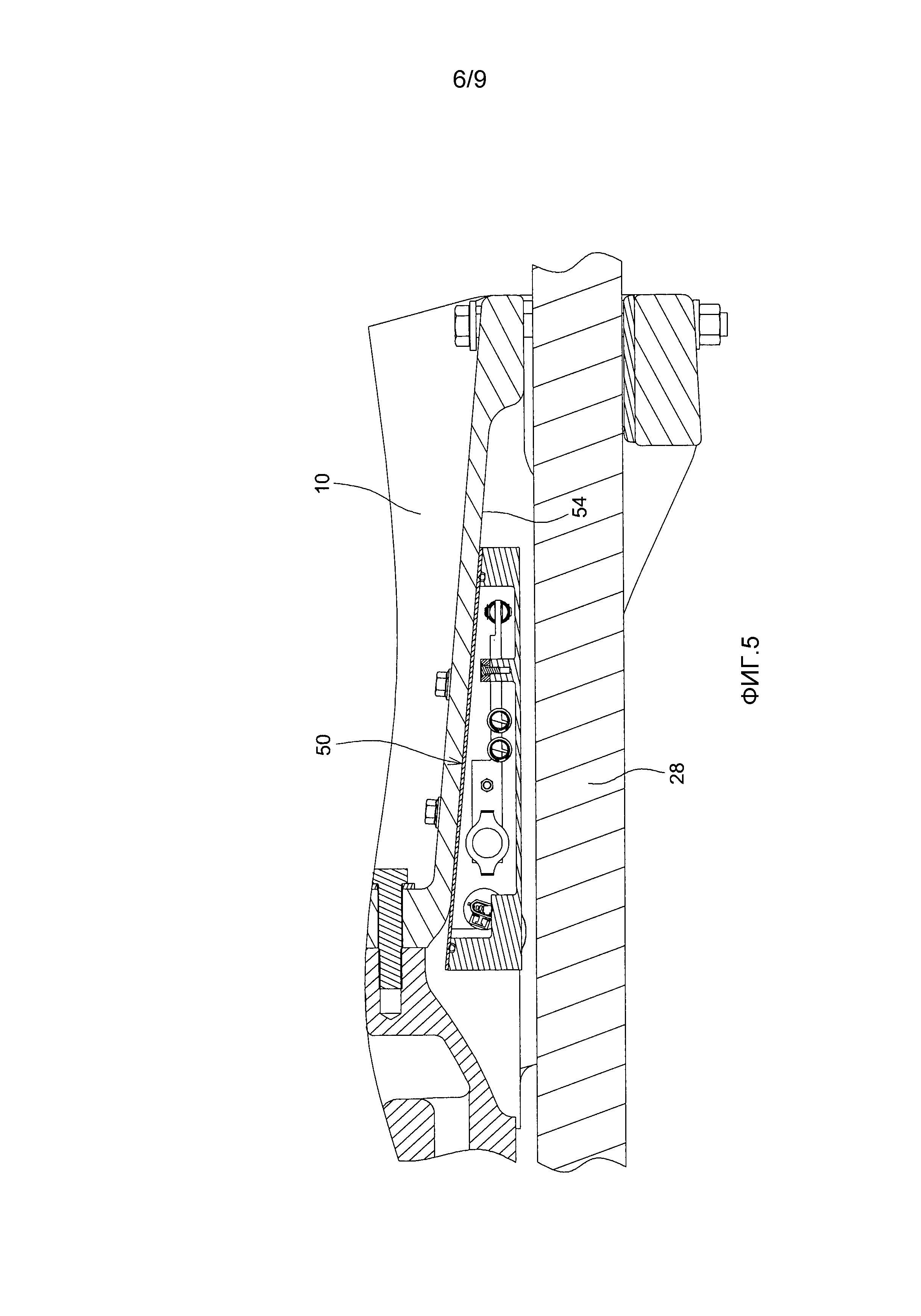
Фиг. 5 представляет собой вид в разрезе по линиям 5-5 на Фиг. 4;
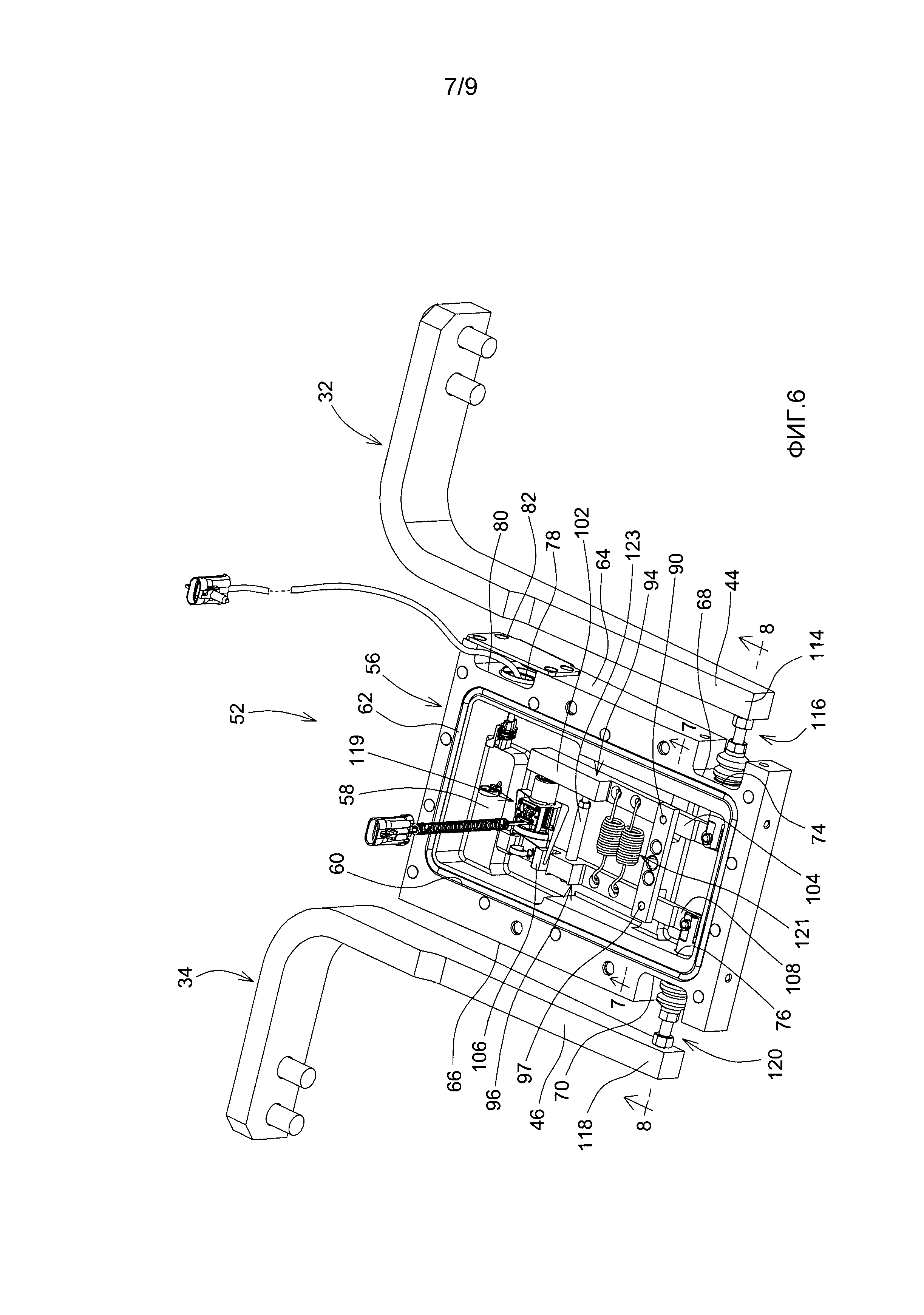
Фиг. 6 представляет собой перспективное изображение части составных элементов, показанных на фиг. 3, но с удаленными для ясности тяговым брусом и крышкой корпуса;
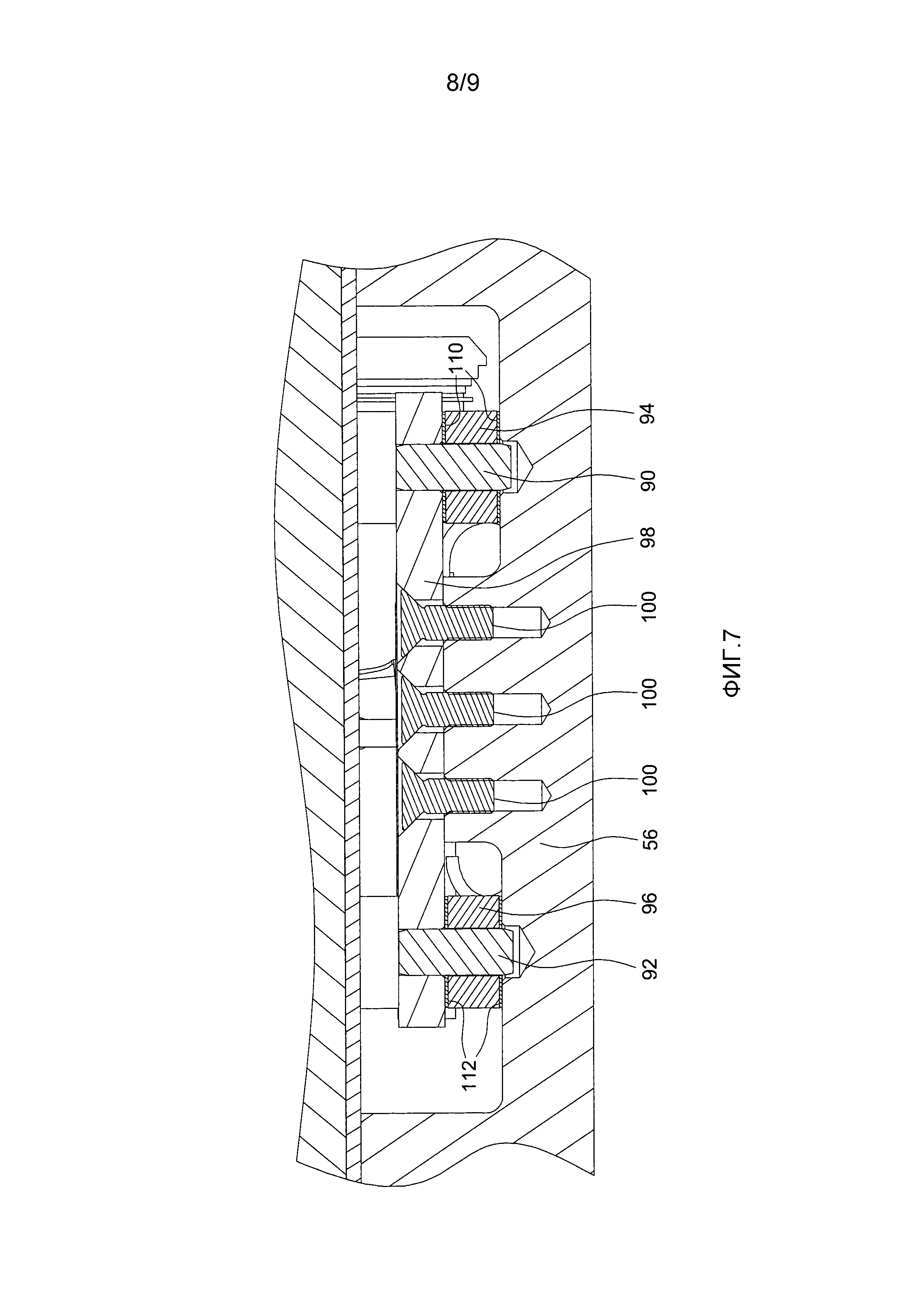
Фиг. 7 представляет собой вид в разрезе по линиям 7-7 на Фиг. 6; и
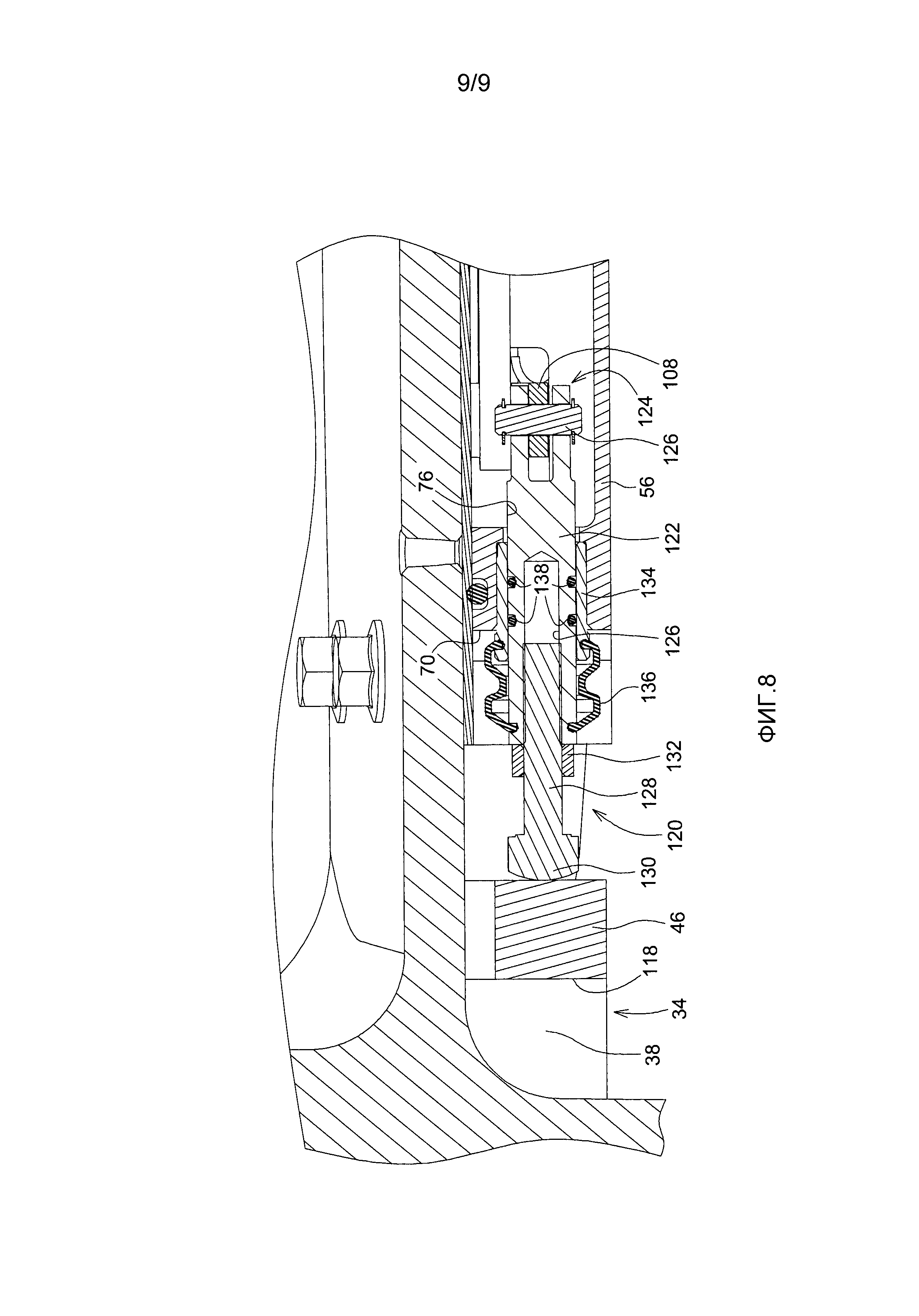
Фиг. 8 представляет собой вид в разрезе по линиям 8-8 на Фиг. 6.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на Фиг. 1, 2 и 3, рама 10 сцепки выполнена с возможностью прикрепления к задней концевой раме рабочего транспортного средства, такого как сельскохозяйственный трактор (не показан). Рама 10 сцепки содержит главный корпус 11 и левую и правую опоры продольной тяги или тяговые проушины 12 и 14. Общепринятая трехточечная сцепка 20 установлена на раме 10 сцепки и содержит левую и правую продольные тяги 24 и 26, которые известным образом соединены с тяговыми проушинами 12 и 14. Общепринятый тяговый брус 28 тянется в продольном направлении под рамой 10 сцепки.
Далее со ссылкой на Фиг. 2А, каждая тяговая проушина 12 и 14 рамы 10 сцепки содержит соответствующую обращенную вперед посадочную поверхность 13 и 15. Рама 10 сцепки образует открывающееся вниз гнездо 17, которое продолжается назад относительно тяговых проушин 12 и 13. Далее со ссылкой на Фиг. 2-4, механизм 30 измерения тягового усилия измеряет тяговые усилия, которые прикладываются к продольным тягам 24 и 26, и генерирует электрический сигнал тягового усилия. Механизм 30 содержит левый и правый L-образные тяговые брусья 32 и 34. Каждый тяговый брус 32, 34 содержит первую или переднюю часть 36, 38, которая прикреплена к посадочной поверхности 13, 15 соответствующей одной из опор 12, 14 тяги. Каждый тяговый брус 32, 34 также имеет вторую часть 44, 46, расположенную сзади и внутри относительно соответствующей первой части 36, 38. Первые части 36, 38 выступают в боковом направлении наружу и друг от друга. Каждая вторая часть 44, 46 продолжается назад от внутреннего конца соответствующей первой части, 36, 38. Каждая первая часть 36, 38 соединена со второй частью 44, 46 посредством соответствующего изогнутого шарнира 48, 50.
Далее со ссылкой на Фиг. 3-5, сенсорный блок или рычажный блок 52 установлен в гнезде 17 и прикреплен к обращенной вниз поверхности 54 рамы 10 сцепки между тяговыми брусьями 32 и 34 и между тяговым брусом 28 и рамой 10 сцепки.
Далее со ссылкой на Фиг. 6, сенсорный блок 52 содержит корпус 56, который образует полость 58. Полость окружена канавкой 60 уплотнения, которая принимает уплотнение 62. Корпус образует левую боковую стенку 64 и правую боковую стенку 66. В левой боковой стенке 64 образовано левое углубление 68, а в правой боковой стенке 66 образовано правое углубление 70. Как углубление 68, так и 70 находятся рядом, но отделены промежутком от заднего конца корпуса 56. Левый канал 74 обеспечивает сообщение полости 58 с левым углублением 68, а правый канал 76 обеспечивает сообщение полости 58 с правым углублением 70. Канал 78 для пучка проводов обеспечивает сообщение полости 58 с углублением 80 для пучка проводов, которое образовано в левой боковой стенке 64 около переднего конца корпуса 56. Углубление 80 закрыто защитой 82 пучка проводов.
Далее со ссылкой на Фиг. 6, 7 и 8, сенсорный блок 52 также содержит пару разнесенных в боковом направлении шарнирных пальцев 90 и 92, которые запрессованы в каналы в корпусе 56. Левые и правые сенсорные рычаги 94 и 96 шарнирно установлены на соответствующих шарнирных пальцах 90 и 92. Крепежная планка 98 принимает оба пальца 90 и 92 и прикручена к корпусу 56 с помощью трех болтов 100. Шарнирный палец 90 разделяет левый рычаг 94 на более длинную часть 102 рычага и более короткую часть 104 рычага. Шарнирный палец 92 разделяет правый рычаг 96 на более длинную часть 106 рычага и более короткую часть 108 рычага. С обеих сторон рычага 94 на палец 90 помещены шайбы 110, и с обеих сторон рычага 96 на палец 92 помещены шайбы 112. Левые короткая часть 104 рычага соединена с концом 114 тягового бруса 32 с помощью левого сенсорного звена 116. Правая короткая часть 108 рычага соединена с концом 118 тягового бруса 34 с помощью правого сенсорного звена 120. Более длинные вторые части 102, 106 рычагов 94, 96 зацепляют концы измерительного преобразователя 119 линейных перемещений. Более длинные вторые части 102, 106 рычагов 94, 96 отодвигаются друг от друга и выходят из зацепления с измерительным преобразователем 119, когда тяговое усилие превышает пороговое значение.
С более длинными частями 102, 106 первого и второго рычагов 94, 96 соединен упругий элемент 121, который содержит пару цилиндрических пружин и смещается, поджимая друг к другу более длинные части 102, 106. Между более длинными частями 102, 106 расположен стопорный элемент 123, который может входить в зацепление с более длинными частями 102, 106, ограничивая перемещение более длинных частей 102, 106 друг к другу.
Сенсорные звенья 116 и 120 продолжаются в поперечном направлении относительно продольного направления. Измерительный преобразователь 119 линейных перемещений имеет первый конец, соединенный с более длинной частью 102 рычага, и второй конец, соединенный с более длинной частью 106 рычага. Измерительный преобразователь 119 генерирует электрический сигнал тягового усилия, поскольку отклонение сенсорных рычагов 94 и 96 является функцией тягового усилия, прикладываемого к тяговым проушинам 12 и 14. Таким образом, сенсорный блок 52 механически суммирует отклонение вторых частей 44, 46 тяговых брусьев 32, 34 и прикладывает суммированное отклонение к измерительному преобразователю 119. Вторые части 44, 46 отодвигаются друг от друга и выходят из зацепления с сенсорными звеньями 116, 120, когда тяговое усилие меньше, чем пороговое значение.
Далее со ссылкой на Фиг. 8, правое сенсорное звено 120 содержит штангу 122 из нержавеющей стали, которая имеет раздвоенный конец 124, который шарнирно соединен с правой короткой частью 108 рычага с помощью шарнирного пальца 126. Штанга 122 содержит резьбовой центральный осевой канал 126, который принимает резьбовой болт 128, который имеет головку 130, которая входит в зацепление с концом 118 тягового бруса 34. Дублирующая гайка 132 накручена на болт 128 для удерживания болта 128 в правильном положении относительно штанги 122. Корпусной канал 7 6 принимает полый бронзовый вкладыш 134, а вкладыш 134 принимает штангу 122 с возможностью скольжения. Сильфонное уплотнение 136 имеет внутренний конец, прикрепленный к вкладышу 134, и внешний конец, прикрепленный к внешнему концу штанги 122. В канавках в наружной поверхности штанги 122 установлена пара кольцевых уплотняющих прокладок 136, которые обеспечивают уплотнение между штангой 122 и вкладышем 134. Сенсорное звено 116 является зеркальным отображением звена 120.
Если смотреть на Фиг. 6, увеличение направленных по существу назад тяговых усилий будет изгибать тяговые проушины 12 и 14 и заставлять концы 114 и 118 тяговых брусьев 32 и 34 двигаться внутрь и друг к другу. Это заставляет более длинные части 102 и 106 рычагов 94 и 96 отодвигаться друг от друга и увеличивать длину измерительного преобразователя 119. В действительности, если тяговые усилия превышают верхнее пороговое значение, более длинные части 102 и 106 будут выходить из зацепления с измерительным преобразователем 119 и посредством этого защищать измерительный преобразователь 119 от перегрузки тягового усилия.
Также если смотреть на Фиг. 6, уменьшение тяговых усилий (или направленное вперед тяговое усилие) будет заставлять концы 114 и 118 тяговых брусьев 32 и 34 двигаться наружу и друг от друга. Это заставляет более длинные части 102 и 106 рычагов 94 и 96 двигаться друг к другу и уменьшать длину измерительного преобразователя 119. В действительности, если тяговые усилия меньше, чем нижнее пороговое значение, концы 114 и 118 будут отцеплять головки 130 болтов сенсорных звеньев 116 и 120, и посредством этого защищать измерительный преобразователь 119 от недостаточной нагрузки тягового усилия. Результатом является система измерения тягового усилия, которая является компактной и которая имеет корпус, который защищает критически важные части от скопления грязи.
Несмотря на то, что изобретение было подробно проиллюстрировано и описано на чертежах и в изложенном выше описании, подобные иллюстрации и описание необходимо рассматривать по своему характеру, как иллюстративное, а не ограничивающее, при этом должно быть понятно, что были показаны и описаны иллюстративные варианты осуществления и что необходимо, чтобы были защищены все изменения и модификации, которые попадают в рамки сущности изобретения. Следует отметить, что альтернативные варианты осуществления предложенного изобретения могут содержать не все описанные признаки и все-таки извлекать пользу по меньшей мере из некоторых из преимуществ подобных признаков. Специалисты в данной области техники легко могут разработать свои собственные варианты осуществления, которые включают один или более признаков предложенного изобретения и попадают в рамки сущности и объема предложенного изобретения, который определяется приложенной формулой изобретения.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения. Система измерения тягового усилия в транспортном средстве с левой и правой продольными тягами для соединения орудия с рамой сцепки содержит корпус. В корпусе установлены первый и второй разнесенные шарнирные пальцы с шарнирно установленными на них первым и вторым рычагом, соответственно. Первый рычаг имеет первую часть, перемещаемую в ответ на тяговое усилие, прикладываемое к левой продольной тяге, и вторую часть. Второй рычаг имеет первую часть, перемещаемую в ответ на тяговое усилие, прикладываемое к правой продольной тяге, и вторую часть. С первым и вторым рычагами соединен упругий элемент, смещенный для поджатия рычагов друг к другу. Между рычагами расположен стопорный элемент, входящий в зацепление с рычагами для ограничения перемещения рычагов друг к другу. Со вторыми частями первого и второго рычагов входит в зацепление измерительный преобразователь, генерирующий электрический сигнал, указывающий расстояние между вторыми частями. Обеспечивается компактность и герметичность системы измерения. 13 з.п. ф-лы, 9 ил.
Комментарии