Инвалидная коляска - RU202676U1
Код документа: RU202676U1
Чертежи
Описание
Полезная модель относится к области специального транспортного машиностроения, в частности к медицинской технике.
Известно моторизованное кресло-каталка [Пат. US 5111899, МПК B60K 1/00, опубл. 1992 г.], содержащее моторно-трансмиссионный узел, выходной вал которого проходит по обе стороны трансмиссионного механизма и содержит на каждом из своих концов ролик; моторно-трансмиссионный узел, несущий опору, на которой закреплены батареи и которая снабжена на своем нижнем переднем конце, по меньшей мере, роликом; корпус, на котором непосредственно установлены сиденье и спинка кресла, выполненные из синтетического материала, и средства быстрой фиксации для соединения и расцепления корпуса с моторно-трансмиссионным узлом, причем средства быстрой фиксации корпуса на моторно-трансмиссионном узле содержат, по меньшей мере, один телескопический элемент, прикрепленный к опоре блоками, причем концы этого телескопического элемента приспособлены для взаимодействия с отверстиями, предусмотренными в корпусе.
Недостатком конструкции является низкий КПД из-за наличия в приводе ходовой части кресла винтового механизма и выступающих в качестве дополнительной опоры передних роликов, а также отсутствия возможности расширения скоростного диапазона движения, что снижает эксплуатационные характеристики инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.
Известна инвалидная коляска, предназначенная для передвижения по лестнице и по горизонтальной поверхности [Пат. RU 103293, МПК A61G 5/00, опубл. 2011 г.], содержащая электропривод с червячным редуктором, раму, кресло. С каждой стороны коляски расположены по три ведущих колеса, закрепленных на кронштейнах под равными углами 120° относительно неподвижной оси. Кронштейны имеют шарниры, на которых они вращаются вокруг неподвижной оси. В задней части коляски есть опорное колесо, которое через стойку соединено с рамой при помощи втулки скольжения. Стойка имеет пружинный ограничитель угла поворота. При подъеме по лестнице угол между стойкой и рамой коляски уменьшается, при спуске увеличивается, что позволяет оставаться креслу все время в горизонтальном положении. Электропривод передает крутящий момент на втулку, на которой жестко посажена ведущая звездочка. Через цепь, крутящий момент распределяется на ведомые звездочки, которые непосредственно связаны с колесами коляски. При движении по горизонтальной поверхности вращаются только колеса, при упоре колес в первую ступеньку начинают вращаться кронштейны вместе с колесами на шарнире вокруг оси, что позволяет коляске передвигаться по лестнице. Переход от движения по горизонтальной плоскости к лестничным маршам происходит без посторонней помощи и дополнительных технических средств. При движении по лестнице, кресло инвалидной коляски сохраняет горизонтальное положение.
Недостатком конструкции является низкий КПД из-за наличия в приводе ходовой части червячного редуктора, цепной передачи и дополнительного опорного колеса, а также отсутствия возможности расширения скоростного диапазона движения, что снижает эксплуатационные характеристики инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.
Известна коляска для людей с ограниченными возможностями в ходьбе [Пат. RU 2688288, МПК A61G 5/00, опубл. 2019 г.], содержащая по два ведущих и ведомых колеса, выполненных в форме «звезды» с тремя равномерно распределенными по окружности «лучами», на концах которых установлены по два опорных колеса. Сиденье установлено на раме с возможностью подъема ее задней части при движении по наклонным поверхностям, включая ступенчатые, за счет двух подвижно присоединенных к ней подъемных винтовых домкратов. Противоположный конец каждого из подъемных винтовых домкратов подключен к установленному на ведущем валу с возможностью осевого перемещения сателлитному редуктору, имеющему подвижное осевое соединение с закрепленным на движителе основным редуктором. От основного редуктора обеспечивается передача вращательного усилия через подвижное осевое соединение и выполненное в сателлитном редукторе шестеренное соединение на подъемный винтовой домкрат. Каждый сателлитный редуктор неподвижно прикреплен к прижимному стакану, установленному на ведущем валу с возможностью осевого перемещения под воздействием подвижно присоединенного к нему прижимного винтового домкрата. Противоположный конец прижимного винтового домкрата подключен к основному редуктору. Прижимной стакан подвижно присоединен к прижимной втулке, выполненной с равномерно распределенными по ее окружности продольными прорезями. В каждой продольной прорези размещен жестко закрепленный на ведущем валу упор. Прижимная втулка снабжена неподвижно прикрепленной к ней ступичной полумуфтой, с помощью которой обеспечивается возможность передачи вращательного усилия от ведущего вала на ступицу ведущего колеса, переводя тем самым ведущее колесо в режим выполнения шагающей функции. Для обеспечения выполнения ведущим колесом вращательной функции ведомый зубчатый шкив, подвижно установленный во внутренней полости его ступицы, снабжен подвижной связью с установленным на ведущем валу ведущим зубчатым шкивом посредством зубчатого приводного ремня и попарно распределенных на равном удалении от ведущего зубчатого шкива направляющих роликов. Направляющие ролики подвижно установлены во внутренней полости ступицы на равном удалении от зубчатого шкива с возможностью регулирования натяжения зубчатого приводного ремня.
Недостатком устройства является низкий КПД из-за наличия в приводе ходовой части цепной передачи, двух ведомых колес, выступающих в качестве дополнительной опоры, сложной трансмиссии, состоящей из редукторов с несоосной передачей и винтовых механизмов, а также из-за отсутствия возможности расширения скоростного диапазона движения, что снижает эксплуатационные характеристики инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.
Наиболее близкой по технической сущности и достигаемому результату является инвалидная коляска для подъема по лестнице на батарейках [Пат. US 6484829 B1, МПК B62D 57/028, опубл. 2002 г.], содержащая раму, сиденье, средство определения угла наклона рамы по отношению к горизонтали, средство регулирования угла наклона рамы по отношению к горизонтали, средство управления углом наклона рамы по отношению к горизонтали, колесно-шагающие движители, выполненные по бортам в виде крестовин, установленных с возможностью вращения вокруг центральной оси коляски, причем каждая крестовина имеет несколько ведущих колес, из которых не более двух находятся в опорном контакте с лестницей. Указанные ходовые крестовины приводятся в движение электрическими двигателями, установленными на раме, через конические передачи. Инвалидная коляска дополнительно включает средство для поворота каждой из двух ходовых крестовин на небольшой угол, причем во время режима движения по ступеням, до такой степени, что только одно ведущее колесо, связанное с данной ходовой крестовиной, находится в контакте с основанием. Инвалидная коляска дополнительно включает ролик, установленный сзади инвалидной коляски, и средства для втягивания ролика таким образом, чтобы сконфигурировать указанную инвалидную коляску для преодоления ступенек лестницы. Инвалидная коляска дополнительно включает в себя средство для определения нагрузки, предназначенное для определения того, когда указанные средства регулирования шага и положения с питанием выдвигаются и подвергаются контактной нагрузке на опорную поверхность. Инвалидная коляска дополнительно включает в себя средство регулировки положения по тангажу, расположенное в носовой части, средство регулировки положения по тангажу, расположенное в кормовой части, и средство определения положения для обнаружения.
К недостаткам устройства относится низкий КПД из-за наличия дополнительных опор в передней и задней частях коляски, а также из-за отсутствия возможности расширения скоростного диапазона движения. Кроме того при перемещении вверх по ступенчатым поверхностям необходим разворот коляски. Все это снижает эксплуатационные характеристики инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.
Задачей представленной полезной модели является повышение КПД инвалидной коляски за счет использования управляемых бортовых планетарных механизмов с возможностью расширения скоростного диапазона и исключения дополнительной опоры при перемещении по горизонтальным, наклонным и ступенчатым поверхностям.
Техническим результатом полезной модели является повышение эксплуатационных характеристик инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.
Указанный технический результат достигается тем, что инвалидная коляска, содержащая раму, сиденье, средство регулирования угла наклона рамы по отношению к горизонтали, корпус привода ходовой части, колесно-шагающие движители, выполненные по бортам в виде крестовин, установленных с возможностью вращения вокруг центральной оси инвалидной коляски, электрические двигатели, расположенные в корпусе привода ходовой части, дополнительно содержит расположенный на раме привод продольного смещения сиденья, при этом каждый электрический двигатель соединен с колесно-шагающим движителем через быстроходную шестерню, входящую в зацепление с зубчатым колесом, жестко связанным с солнечной шестерней бортового планетарного механизма, управляемого посредством ленточного тормоза, контактирующего с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по наклонной или ступенчатой поверхностям, и муфты, соединяющей водило, связанное с солнечной шестерней конечной тихоходной планетарной передачи колесно-шагающего движителя, с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по горизонтальной поверхности, при этом средство регулирования угла наклона рамы по отношению к горизонтали выполнено в виде активного актуатора, шарнирно связанного сверху с рамой, а снизу – с корпусом привода ходовой части, при этом рама шарнирно связана с корпусом привода ходовой части.
Наличие управляемых бортовых планетарных механизмов в приводе ходовой части позволяет расширить скоростной диапазон заявляемой инвалидной коляски с учетом выбора фактического режима движения по горизонтальным, наклонным и ступенчатым поверхностям. Осуществляется это за счет присутствия в конструкции с каждой стороны ленточного тормоза, контактирующего с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по наклонной или ступенчатой поверхностям, и муфты, соединяющей водило, связанное с солнечной шестерней конечной тихоходной планетарной передачи колесно-шагающего движителя, с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по горизонтальной поверхности. Быстроходная шестерня, входящая в зацепление с зубчатым колесом, жестко связанным с солнечной шестерней бортового планетарного механизма, дополнительно способствует увеличению общего передаточного числа привода ходовой части. Система стабилизации положения человека, состоящая из расположенного на раме привода продольного смещения сиденья и активного актуатора, регулирующего угол наклона рамы с сиденьем по отношению к горизонтали, снижает потери энергии, в том числе при шагающем режиме движения по ступеням лестницы, и восполняет отсутствие дополнительной опоры. Все выше перечисленное повышает эксплуатационные характеристики инвалидной коляски, а именно проходимость, подвижность и комфортабельность, при передвижении по горизонтальным, наклонным и ступенчатым поверхностям.
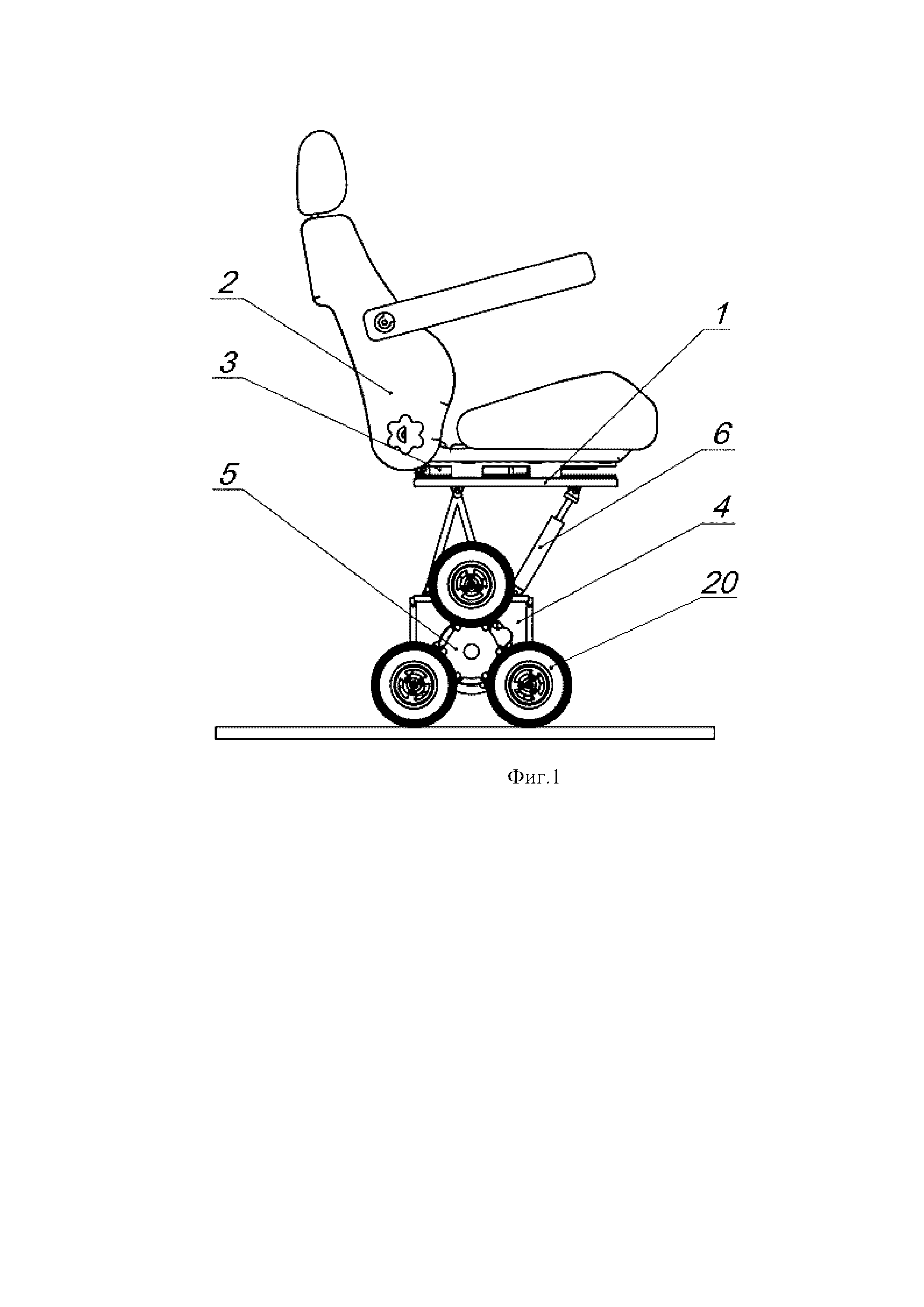
На фиг. 1 представлен общий вид предлагаемой инвалидной коляски.
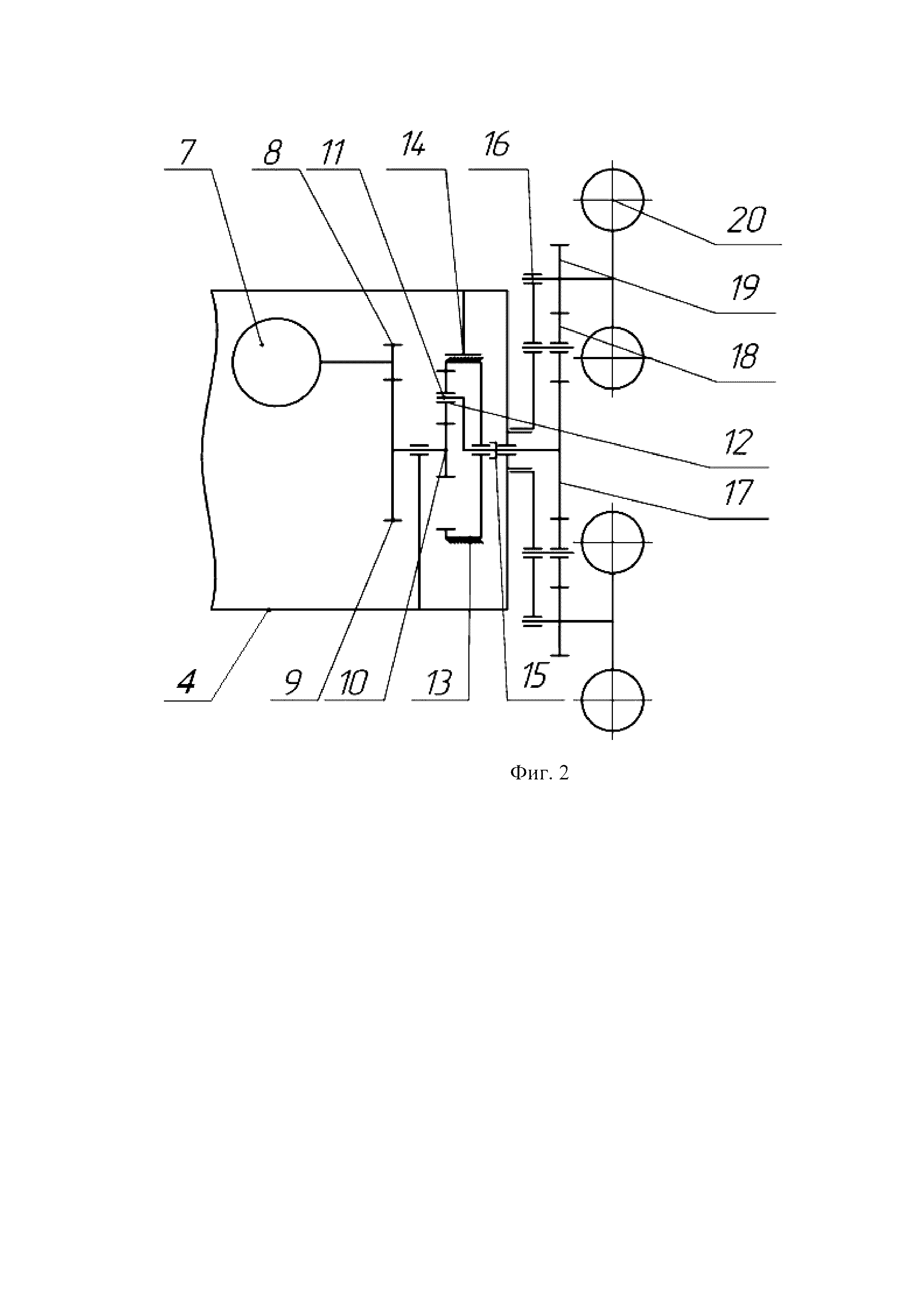
На фиг. 2 представлена схема привода ходовой части предлагаемой инвалидной коляски.
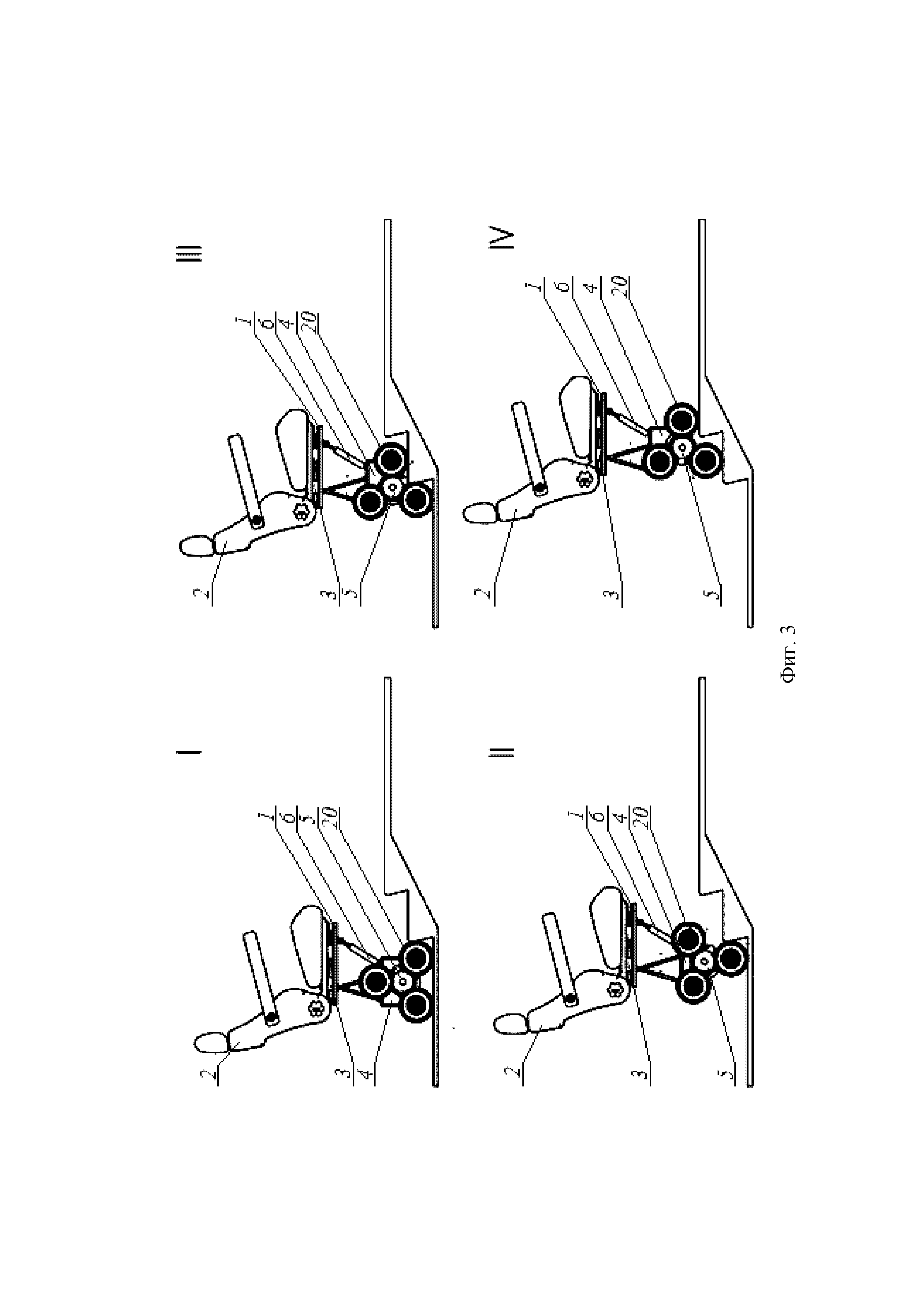
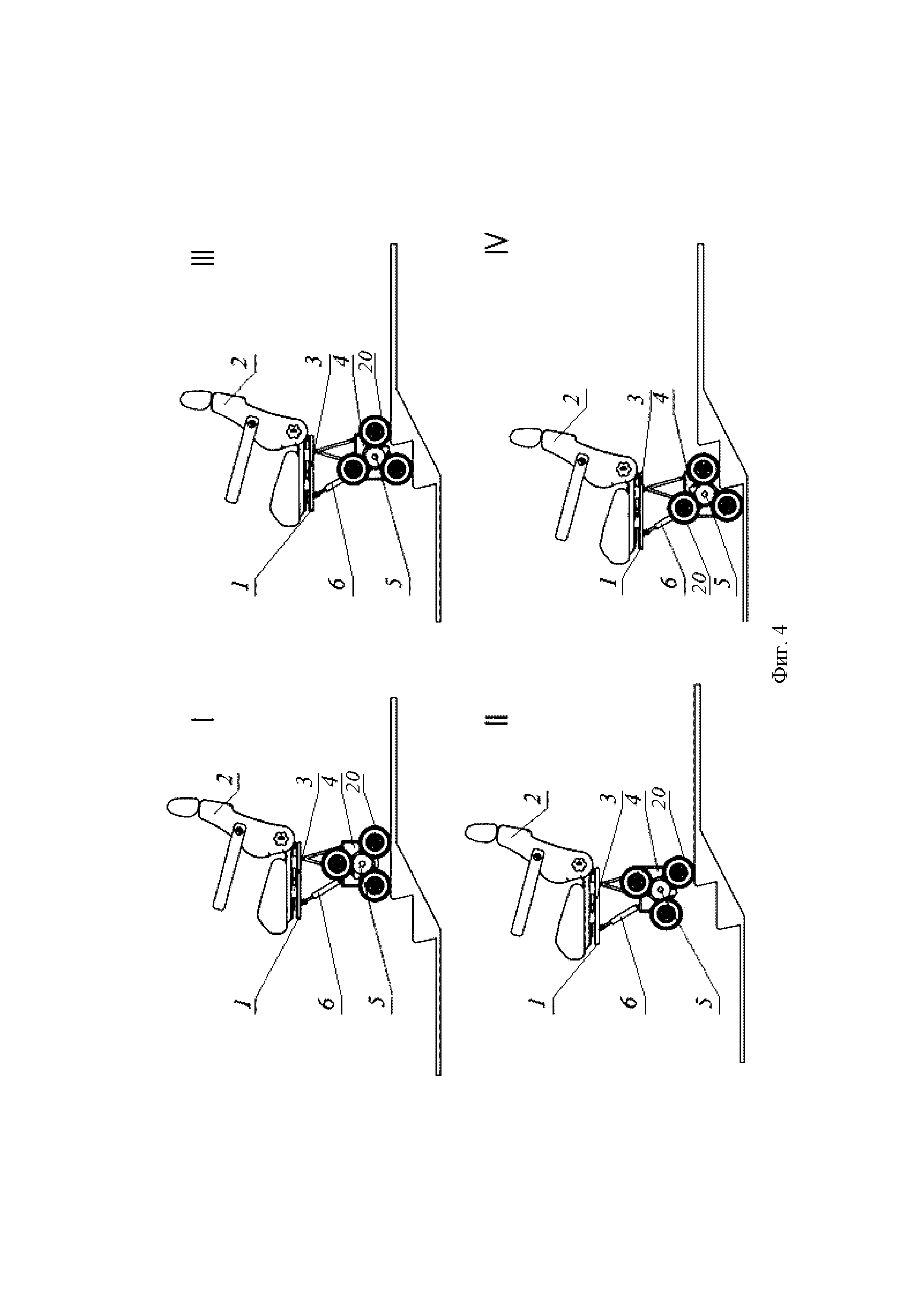
На фиг. 3 и 4 представлены сценарии передвижения при подъеме и спуске по ступенчатой поверхности предлагаемой инвалидной коляски.
Инвалидная коляска (фиг. 1) содержит раму 1, сиденье 2, расположенный на раме 1 привод продольного смещения 3 сиденья 2, корпус привода ходовой части 4, выполненные по бортам в виде крестовин, установленных с возможностью вращения вокруг центральной оси инвалидной коляски, колесно-шагающие движители 5, средство регулирования угла наклона рамы 1 по отношению к горизонтали, выполненное в виде активного актуатора 6. Активный актуатор 6 шарнирно связан сверху с рамой 1, а снизу – с корпусом привода ходовой части 4. Рама 1 шарнирно связана с корпусом привода ходовой части 4. В корпусе привода ходовой части 4 располагаются электрические двигатели 7 (фиг. 2), соединенные с колесно-шагающими движителями 5. Каждый электрический двигатель 7 приводит во вращение быстроходную шестерню 8, которая входит в зацепление с зубчатым колесом 9, жестко связанным с солнечной шестерней 10. Солнечная шестерня 10 в совокупности с водилом 11, сателлитами 12 и коронной шестерней 13 составляют бортовой планетарный механизм. Каждый бортовой планетарный механизм управляется посредством ленточного тормоза 14, контактирующего с коронной шестерней 13 в режиме движения инвалидной коляски по наклонной или ступенчатой поверхностям, и муфты 15, соединяющей водило 11 с коронной шестерней 13 в режиме движения инвалидной коляски по горизонтальной поверхности. Каждый колесно-шагающий движитель 5 включает в себя корпус-водило 16, внутри которого в зубчатом зацеплении последовательно находятся солнечная шестерня 17, связанная с водилом 11, сателлиты 18 и зубчатые колеса 19, связанные с ведущими колесами 20. Корпус-водило 16 в совокупности с солнечной шестерней 17, сателлитами 18 и зубчатыми колесами 19 составляют конечную тихоходную планетарную передачу колесно-щагающего движителя 5.
Предлагаемая инвалидная коляска работает следующим образом. При движении по горизонтальной поверхности расположенный на каждом борту электрический двигатель 7 (фиг. 2) приводит в действие быстроходную шестерню 8, через нее зубчатое колесо 9 и солнечную шестерню 10. На данном режиме работы ленточный тормоз 14 выключен и не контактирует с коронной шестерней 13, а муфта 15 включена. Муфта 15 соединяет водило 11 с коронной шестерней 13. Крутящий момент через солнечную шестерню 10, сателлиты 12 и водило 11 передается на солнечную шестерню 17, через нее на сателлиты 18, зубчатые колеса 19 конечной тихоходной планетарной передачи и далее на ведущие колеса 20. Таким образом, уменьшается передаточное число привода ходовой части и увеличивается скорость перемещения при тех же энергетических затратах электрических двигателей 7. Повышается подвижность инвалидной коляски.
При движении по наклонной поверхности, при котором требуется увеличить проходимость инвалидной коляски, на каждом борту включается ленточный тормоз 14 (фиг. 2), останавливая коронную шестерню 13, а муфта 15 выключается, отсоединяя водило 11 с коронной шестерней 13. На данном режиме увеличивается передаточное число привода ходовой части и крутящий момент на ведущих колесах 20.
В этом режиме инвалидная коляска перемещается и при подъеме по ступенчатой поверхности (фиг. 3). При достижении первой нижней ступени лестничного пролета на каждом борту одно из ведущих колес 20, упираясь в вертикальную поверхность ступени, блокируется, что, в свою очередь, посредством зубчатых передач «солнечная шестерня 17 – сателлиты 18» и «сателлиты 18 – зубчатые колеса 19» приводит во вращение корпус-водило 16 относительно блокируемого ведущего колеса 20 (фиг. 2). Это позволяет перемещаться по ступенчатым поверхностям. Затем данный процесс циклически повторяется вплоть до достижения инвалидной коляской верхней ступени лестницы. В процессе перемещения инвалидной коляски по лестнице положение человека стабилизируется за счет привода продольного смещения 3 сиденья 2 и активного актуатора 6 (фиг. 1), а также за счет резистивного момента привода ходовой части. Происходит смещение центра масс человека в сторону перемещения, что способствует уменьшению затрачиваемого крутящего момента для преодоления ступеней и исключает необходимость в дополнительной опоре.
При спуске по ступенчатой поверхности (фиг. 4) задействуется режим, аналогичный режиму движения по горизонтальной поверхности и предполагающий отключение на каждом борту ленточного тормоза 14 и включение муфты 15 (фиг. 2). Необходимое подрессоривание коляски и стабилизация положения человека при шагающем перемещении вниз по ступеням обеспечиваются пневматическими шинами ведущих колес 20 (фиг. 2), приводом продольного смещения 3 и активным актуатором 6 (фиг. 1). Повышается комфортабельность инвалидной коляски.
Таким образом, за счет наличия расположенного на раме привода продольного смещения сиденья, соединения каждого электрического двигателя с колесно-шагающим движителем через быстроходную шестерню, входящую в зацепление с зубчатым колесом, жестко связанным с солнечной шестерней бортового планетарного механизма, управляемого посредством ленточного тормоза, контактирующего с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по наклонной или ступенчатой поверхностям, и муфты, соединяющей водило, связанное с солнечной шестерней конечной тихоходной планетарной передачи колесно-шагающего движителя, с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по горизонтальной поверхности, средства регулирования угла наклона рамы по отношению к горизонтали, выполненного в виде активного актуатора, шарнирно связанного сверху с рамой, а снизу – с корпусом привода ходовой части, при этом рама шарнирно связана с корпусом привода ходовой части, достигается технический результат по повышению эксплуатационных характеристик (проходимость, подвижность и комфортабельность) инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.
Реферат
Полезная модель относится к области специального транспортного машиностроения, в частности к медицинской технике.Технический результат полезной модели – повышение эксплуатационных характеристик инвалидной коляски, предназначенной для передвижения по горизонтальным, наклонным и ступенчатым поверхностям.Указанный технический результат достигается тем, что инвалидная коляска, содержащая раму, сиденье, средство регулирования угла наклона рамы по отношению к горизонтали, корпус привода ходовой части, колесно-шагающие движители, выполненные по бортам в виде крестовин, установленных с возможностью вращения вокруг центральной оси инвалидной коляски, электрические двигатели, расположенные в корпусе привода ходовой части, дополнительно содержит расположенный на раме привод продольного смещения сиденья, при этом каждый электрический двигатель соединен с колесно-шагающим движителем через быстроходную шестерню, входящую в зацепление с зубчатым колесом, жестко связанным с солнечной шестерней бортового планетарного механизма, управляемого посредством ленточного тормоза, контактирующего с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по наклонной или ступенчатой поверхностям, и муфты, соединяющей водило, связанное с солнечной шестерней конечной тихоходной планетарной передачи колесно-шагающего движителя, с коронной шестерней бортового планетарного механизма в режиме движения инвалидной коляски по горизонтальной поверхности, при этом средство регулирования угла наклона рамы по отношению к горизонтали выполнено в виде активного актуатора, шарнирно связанного сверху с рамой, а снизу – с корпусом привода ходовой части, при этом рама шарнирно связана с корпусом привода ходовой части.
Комментарии