Транспортное средство - RU2605661C1
Код документа: RU2605661C1
Чертежи
Описание
Изобретение относится к мобильным транспортным средствам инерционно-ползающего типа.
Известно транспортное средство, содержащее три опоры, предназначенные для контакта с поверхностью перемещения, три звена, обеспечивающие шарнирное соединение опор, и два электродвигателя с реечной передачей, обеспечивающие угловые смещения между соседними звеньями (Патент на полезную модель №67541, МПК B62D, 2007).
Недостатком данного транспортного средства является то, что взаимные угловые повороты соседних звеньев ограничены длиной реечной передачи. Вследствие этого снижается маневренность транспортного средства.
Наиболее близким из известных технических решений является транспортное средство, содержащее опоры, предназначенные для контакта с поверхностью перемещения, звенья, обеспечивающие шарнирное соединение опор, и два электродвигателя, закрепленных на концах среднего звена, причем концы крайних звеньев закреплены на соответствующих опорах и осях электродвигателей (Патент РФ 2196069, МПК B62D 57/028, F0363/00, 2003).
Недостатком данного транспортного средства является то, что быстрые «инерционные» повороты звеньев необходимо чередовать с медленными «холостыми» поворотами звеньев. Вследствие этого снижается «средняя» поступательная скорость транспортного средства.
Кроме того, поскольку поверхность перемещения не является идеально-горизонтальной, то при жестких звеньях неизбежно возникают перекосы опор. Это приводит к перераспределению сил трения в местах контакта опор с поверхностью перемещения и соответственно затрудняет выполнение транспортным средством необходимых маневров.
Техническая задача, на решение которой направлено изобретение, состоит в повышении маневренности транспортного средства за счет периодического изменения сил трения в местах контакта опор с поверхностью и периодической фиксации взаимного положения соответствующих опор и звеньев.
Техническая задача достигается тем, что транспортное средство, содержащее опоры, предназначенные для контакта с поверхностью перемещения, звенья, обеспечивающие шарнирное соединение опор, и два электродвигателя, закрепленных на концах среднего звена, причем концы крайних звеньев закреплены на соответствующих опорах и осях электродвигателей, в отличие от прототипа оно дополнительно снабжено шариковыми обоймами с электромагнитами, установленными в контактных частях опор, и электромагнитами, предназначенными для периодической фиксации взаимного положения соответствующих звеньев и опор, причем звенья выполнены в виде гибких пластин.
Технический результат заключается в обеспечении различных программируемых вариантов перемещения транспортного средства по поверхности.
Сущность изобретения поясняется чертежами.
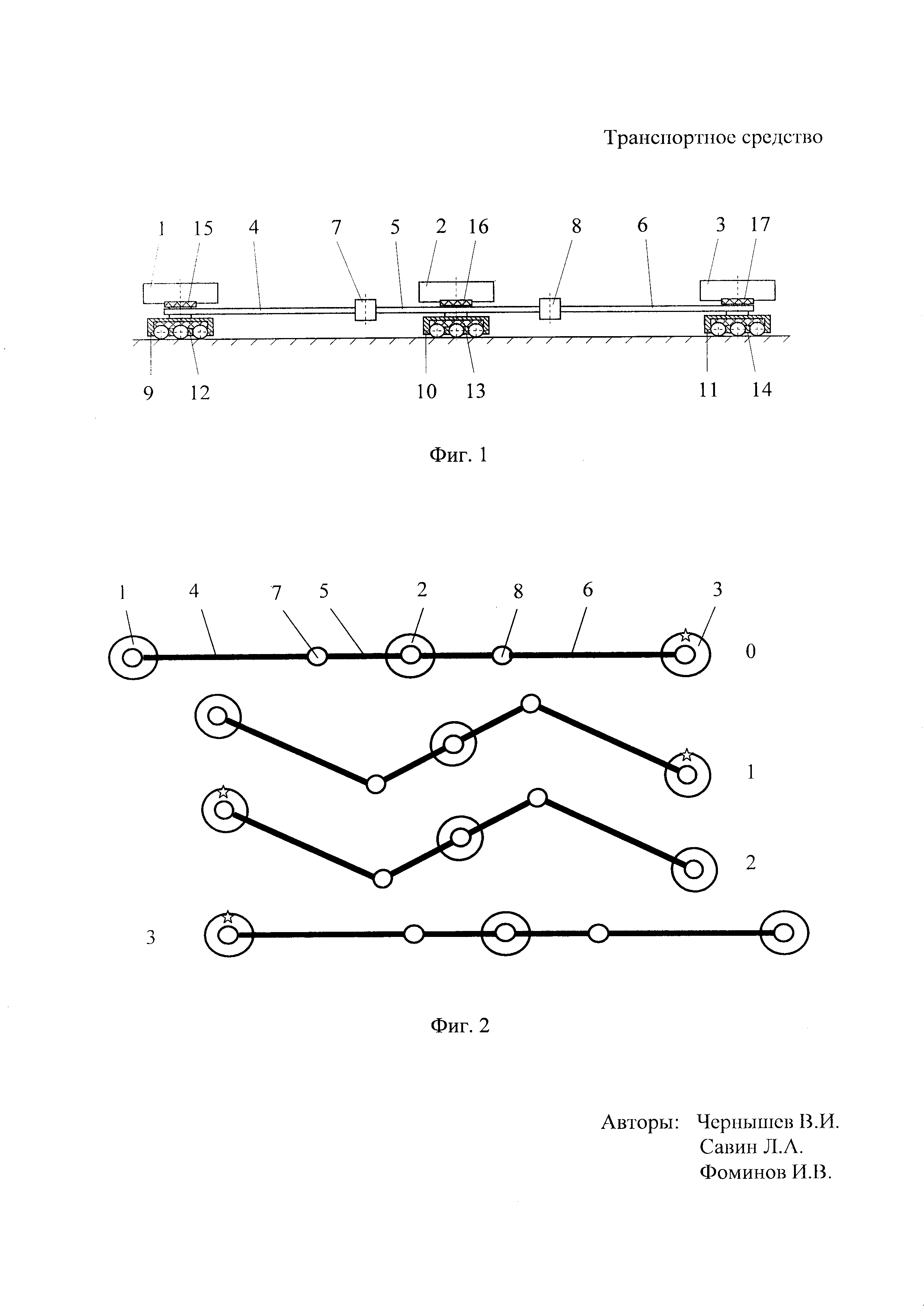
На фиг. 1 изображен общий вид транспортного средства (вид сбоку).
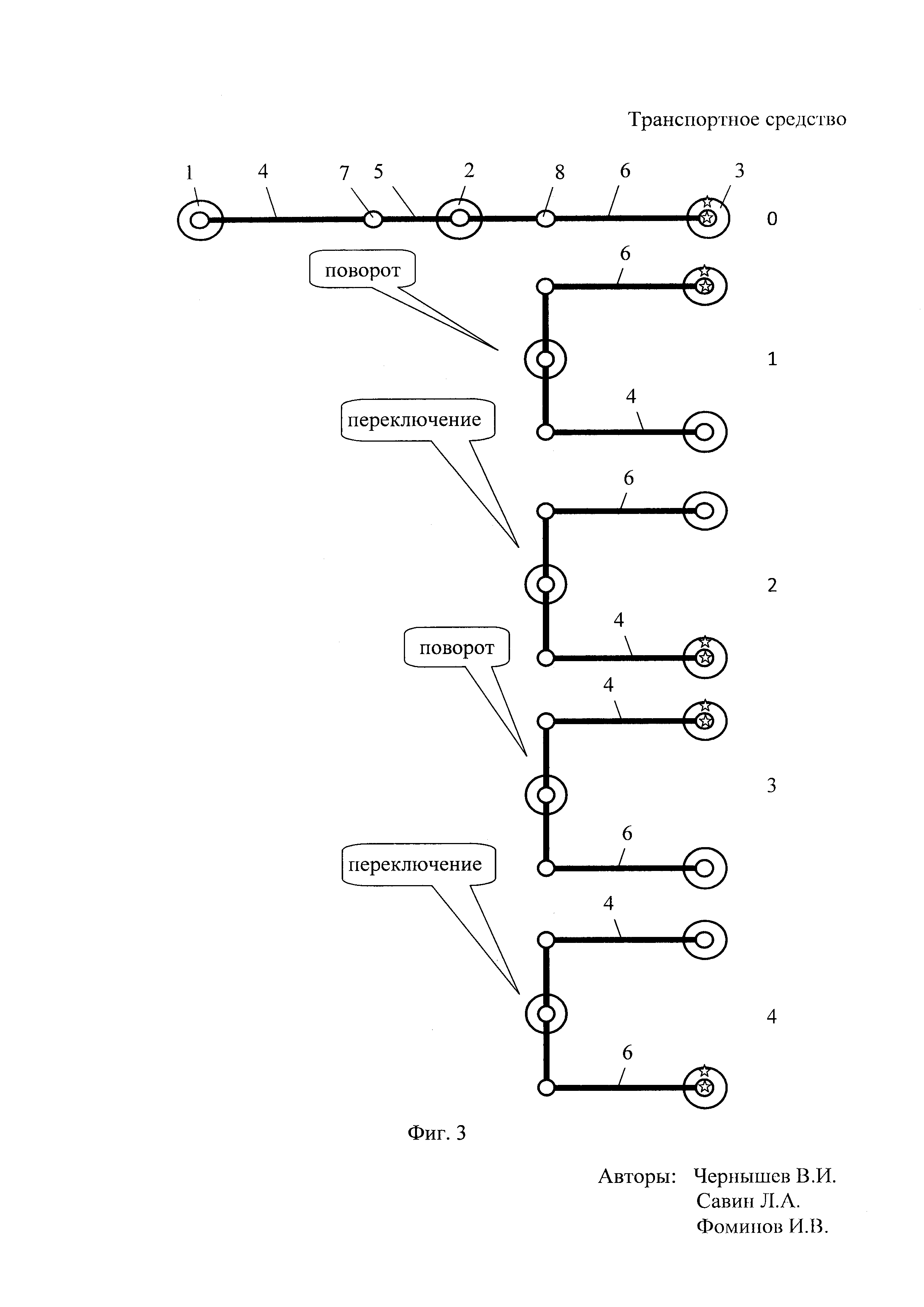
На фиг. 2 схематично изображены последовательные положения и состояния транспортного средства в режиме «безынерционного ползания» при поступательном движении (вид сверху).
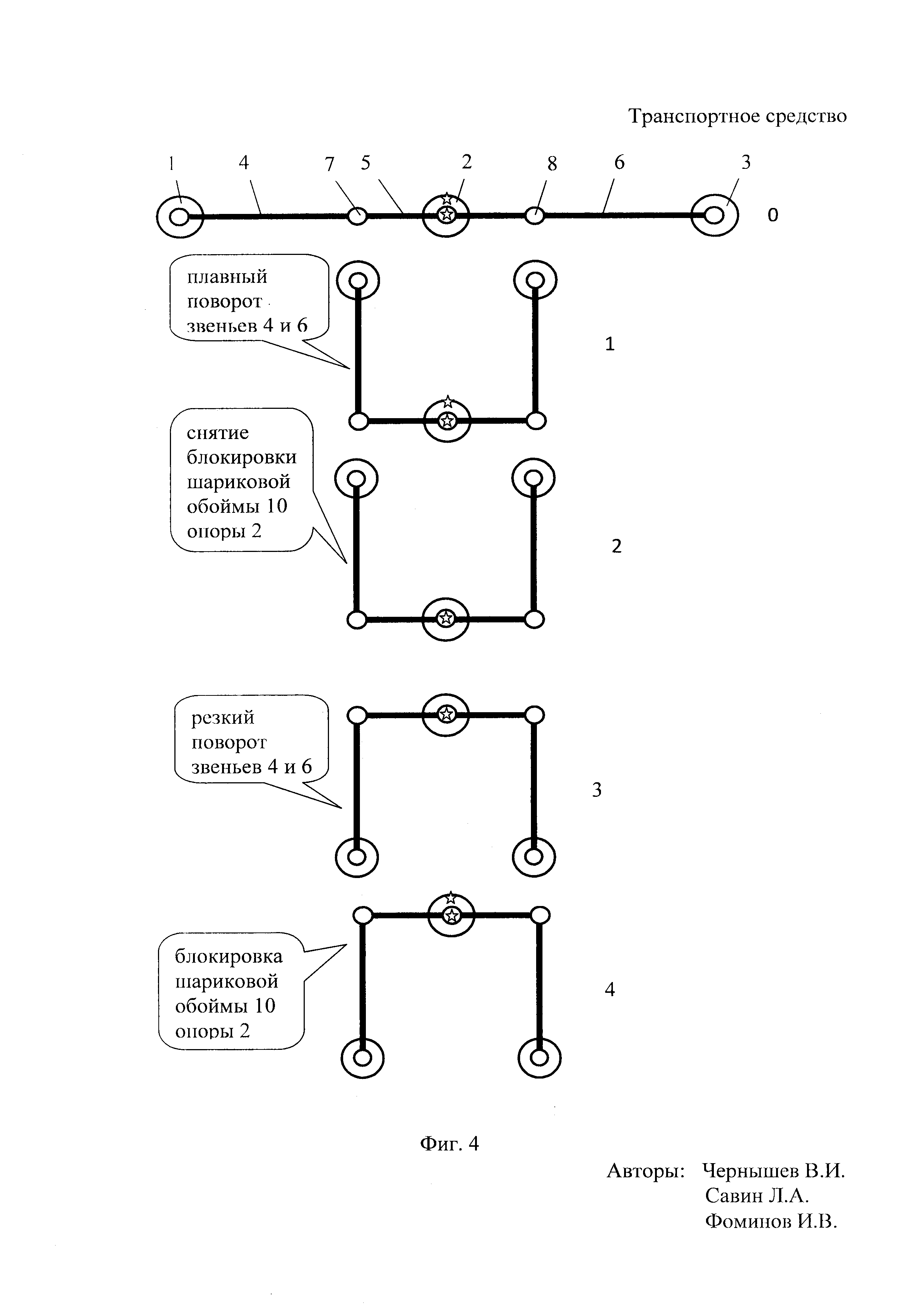
На фиг. 3 схематично изображены последовательные положения и состояния транспортного средства в режиме «безынерционного ползания» при боковом движении (вид сверху).
На фиг. 4 схематично изображены последовательные положения и состояния транспортного средства в режиме периодического инерционного воздействия при поступательном движении (вид сверху).
Транспортное средство содержит опоры 1, 2 и 3, предназначенные для контакта с поверхностью перемещения и крепления на них технологического оборудования или полезного груза, звенья 4, 5 и 6, выполненные в виде гибких пластин, электродвигатели 7 и 8 и электромагниты 12-17.
Электродвигатели 7 и 8 жестко закреплены на концах звена 5. Левый конец звена 4 шарнирно соединен с опорой 1, а правый конец - с осью электродвигателя 7. Соответственно, правый конец звена 6 шарнирно соединен с опорой 3, а левый конец - с осью электродвигателя 8. Звено 5 шарнирно соединено с опорой 2. Данное шарнирное соединение расположено в средней части звена 5.
Контактные части опор 1, 2, 3 выполнены в виде шариковых обойм 9, 10, 11 и снабжены электромагнитами 12, 13, 14, которые предназначены для периодической блокировки этих шариковых обойм.
В шарнирных соединениях между опорами 1, 2, 3 и звеньями 4, 5, 6 установлены электромагниты 15, 16, 17, которые предназначены для периодической фиксации взаимного положения соответствующих звеньев и опор.
Передвижение транспортного средства по горизонтальной поверхности может быть запрограммировано различным образом.
Рассмотрим один из возможных вариантов поступательного движения транспортного средства в режиме «безынерционного ползания» (фиг. 2). В начальном положении (0) включается в работу электромагнит 14. В результате этого происходит блокировка шариковой обоймы 11 (данная операция отмечена появлением звездочки). Поскольку силы трения в месте контакта опоры 3 с поверхностью на порядок превышают силы трения в местах контакта опор 1 и 2 с поверхностью, то при включении в работу электродвигателей 7 и 8 звенья 4, 5 и 6 поворачиваются и транспортное средство переводится из положения (0) в положение (1). После этого электромагнит 14 выключается из работы, а электромагнит 12 включается в работу (данная операция переключения отмечена перестановкой звездочки), и транспортное средство переводится в состояние (2). Поскольку силы трения в месте контакта опоры 1 с поверхностью на порядок превышают силы трения в местах контакта опор 2 и 3 с поверхностью, то при включении в работу электродвигателей 7 и 8 звенья 4, 5 и 6 поворачиваются и транспортное средство переводится из положения (2) в положение (3). Вышеописанный цикл движения можно повторить любое количество раз, пока транспортное средство не переместится на требуемое расстояние.
Рассмотрим также следующий возможный вариант поступательного движения транспортного средства в режиме «безынерционного ползания» (фиг. 3). В начальном положении (0) включаются в работу электромагниты 14 и 17 (данная операция отмечена появлением двух звездочек). В результате этого происходит блокировка шариковой обоймы 11 и фиксация взаимного положения звена 6 и опоры 3. Поскольку силы трения в месте контакта опоры 3 с поверхностью на порядок превышают силы трения в местах контакта опор 1 и 2 с поверхностью, то при включении в работу электродвигателей 7 и 8 звенья 4 и 5 поворачиваются и транспортное средство переводится из положения (0) в положение (1). После этого электромагниты 14 и 17 выключаются из работы, а электромагниты 12 и 15 включаются в работу (данная операция переключения отмечена перестановкой звездочек), и транспортное средство переводится в состояние (2). Поскольку силы трения в месте контакта опоры 1 с поверхностью на порядок превышают силы трения в местах контакта опор 2 и 3 с поверхностью, то при включении в работу электродвигателей 7 и 8 звенья 5 и 6 поворачиваются и транспортное средство переводится из положения (2) в положение (3). Далее, электромагниты 12 и 15 выключаются из работы, а электромагниты 14 и 17 включаются в работу (данная операция переключения отмечена перестановкой звездочек), и транспортное средство переводится в состояние (4). Вышеописанный цикл движения можно повторить любое количество раз, пока транспортное средство не переместится на требуемое расстояние.
Рассмотрим теперь возможный вариант поступательного движения транспортного средства в режиме периодического инерционного воздействия (фиг. 4). В начальном положении (0) включаются в работу электромагниты 13 и 16 (данная операция отмечена появлением двух звездочек). В результате этого происходят блокировка шариковой обоймы 10 и фиксация взаимного положения звена 5 и опоры 2. Поскольку силы трения в месте контакта опоры 2 с поверхностью на порядок превышают силы трения в местах контакта опор 1 и 3 с поверхностью, то при включении в работу электродвигателей 7 и 8 звенья 4 и 6 поворачиваются, и транспортное средство переводится из положения (0) в положение (1). После этого электромагнит 13 выключается из работы (данная операция снятия блокировки шариковой обоймы 10 отмечена удалением звездочки), и транспортное средство переводится в состояние (2). Далее, при включении в работу электродвигателей 7 и 8 происходит резкий поворот звеньев 4 и 6. Транспортное средство воспринимает импульс силы и перемещается из положения (3) в положение (4), где после включения в работу электромагнита 13 происходит блокировка шариковой обоймы 10 опоры 2. Вышеописанный цикл движения можно повторить любое количество раз, пока транспортное средство не переместится на требуемое расстояние.
Выполнение контактной части опор 1, 2, 3 в виде шариковых обойм 9, 10, 11 с установленными в них электромагнитами 12, 13, 14, а также наличие дополнительных электромагнитов 15, 16, 17 позволяет обеспечить реализацию различных программируемых вариантов перемещения транспортного средства по горизонтальной поверхности. Достигается это посредством периодического изменения сил трения (переход от силы трения покоя к силам трения качения и наоборот) и задания требуемых относительных перемещений и скоростей звеньев 4, 5, 6.
Кроме того, выполнение звеньев 4, 5, 6 в виде гибких пластин позволяет существенно уменьшить изгибные моменты (в вертикальной плоскости) и крутильные моменты, которые воздействуют на опоры 4, 5, 6 вследствие их перекосов при движении транспортного средства по реальной поверхности. Как следствие, устраняются нежелательные взаимные перераспределения сил трения в местах контакта опор 4, 5, 6 с поверхностью перемещения.
Реферат
Изобретение относится к транспортному средству с механическими опорами для перемещения транспортного средства. Транспортное средство содержит опоры, предназначенные для контакта с поверхностью перемещения, звенья, обеспечивающие шарнирное соединение опор, два электродвигателя и электромагниты. Звенья выполнены в виде гибких пластин. Электродвигатели жестко закреплены на концах среднего звена. Концы крайних звеньев закреплены на соответствующих опорах и осях электродвигателей. В средней части среднего звена расположено шарнирное соединение с опорой. Контактные части опор выполнены в виде шариковых обойм и снабжены электромагнитами, которые предназначены для периодической блокировки этих шариковых обойм. В шарнирных соединениях между опорами и звеньями установлены электромагниты, которые предназначены для периодической фиксации взаимного положения соответствующих звеньев и опор. Технический результат заключается в обеспечении различных программируемых вариантов перемещения транспортного средства по поверхности. 4 ил.
Комментарии