Узел датчика тягового усилия (варианты) - RU2616793C2
Код документа: RU2616793C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Представленное раскрытие относится к узлу датчика усилия для определения усилий, таких как тяговые усилия, прикладываемых к навесному устройству орудия сельскохозяйственного трактора.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Сельскохозяйственные орудия можно прикреплять к трехточечному навесному устройству сельскохозяйственного трактора. Обычно, трехточечное навесное устройство включает в себя механизм измерения усилия, который предоставляет сигнал тягового усилия в систему управления, которая опускает и поднимает орудие в качестве функции измеренного тягового усилия и, возможно, в качестве функции других измеренных параметров, таких как положение, скорость вращения двигателя, пробуксовка колес и т.д. Некоторые известные производственные механизмы измерения тяги имеют ряд подвижных деталей, которые требуют периодического технического обслуживания. Оно включает удаление земли и скопления грязи и смазывание плунжера датчика тяги для предотвращения попадания влаги и грязи. В определенных условиях накопленные грязь и земля могут препятствовать движению необходимого компонента и могут являться причинами некорректных сигналов тяговых усилий. Будущие конструкции тракторов будут иметь меньше пространства для подобных компонентов датчиков тяги. Таким образом, необходимо иметь датчик тяги, который требует меньшее пространство, который не имеет подвижных деталей, нуждающихся в смазке, и который не нуждается в защите от попадания грязи.
Другие известные механизмы измерения тяги требуют дорогостоящих штифтов для измерения тяги, изгибающихся штанг и валов для измерения тяги. Для штифтов для измерения тяги требуются два инструментальных штифта, которые удваивают стоимость и уменьшают надежность. Известная существующая система измерения тяги на тракторах John Deere с четырьмя ведущими колесами измеряет деформацию накладок крепления продольной тяги. Данные накладки являются большими, и для измерения данного сигнала требуется большое количество деталей. Система также имеет подвижные детали. Системы с изгибающимися штангами и валами измерения тяги имеют подвижные детали и требуют герметичного отделения и значительного количества пространства. Требуется более простой и более надежный механизм измерения тяги с низкой стоимостью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно аспекту представленного раскрытия механизм измерения тяги включает в себя тяговую раму, выполненную с возможностью прикрепления к раме транспортного средства. Тяговая рама имеет левую и правую опоры, выполненные с возможностью соединения с соответствующими левой и правой продольными тягами. Тяговая накладка имеет левый конец, прикрепленный к передней стороне левой опоры, и правый конец, прикрепленный к передней стороне правой опоры. Тяговая накладка может деформироваться в ответ на тяговые усилия, прикладываемые к левой и правой опорам. К тяговой накладке прикреплен датчик тяги. Датчик генерирует сигнал тяги в ответ на деформацию тяговой накладки. Датчик предпочтительно прикреплен к передней стороне тяговой накладки. Тяговая рама имеет центральный корпус, выполненный с возможностью прикрепления к раме транспортного средства. Из левого переднего угла корпуса выступает левая опора, а из правого переднего угла корпуса выступает правая опора. Центральный корпус образует углубление, и данное углубление перекрывает тяговая накладка. Тяговая накладка имеет вертикальный размер больше, чем ее продольный размер. Данный механизм измерения тяги механически усредняет сигнал с помощью только единственного блока измерения, результатом чего является более простая конструкция, пониженная стоимость и повышенная надежность.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
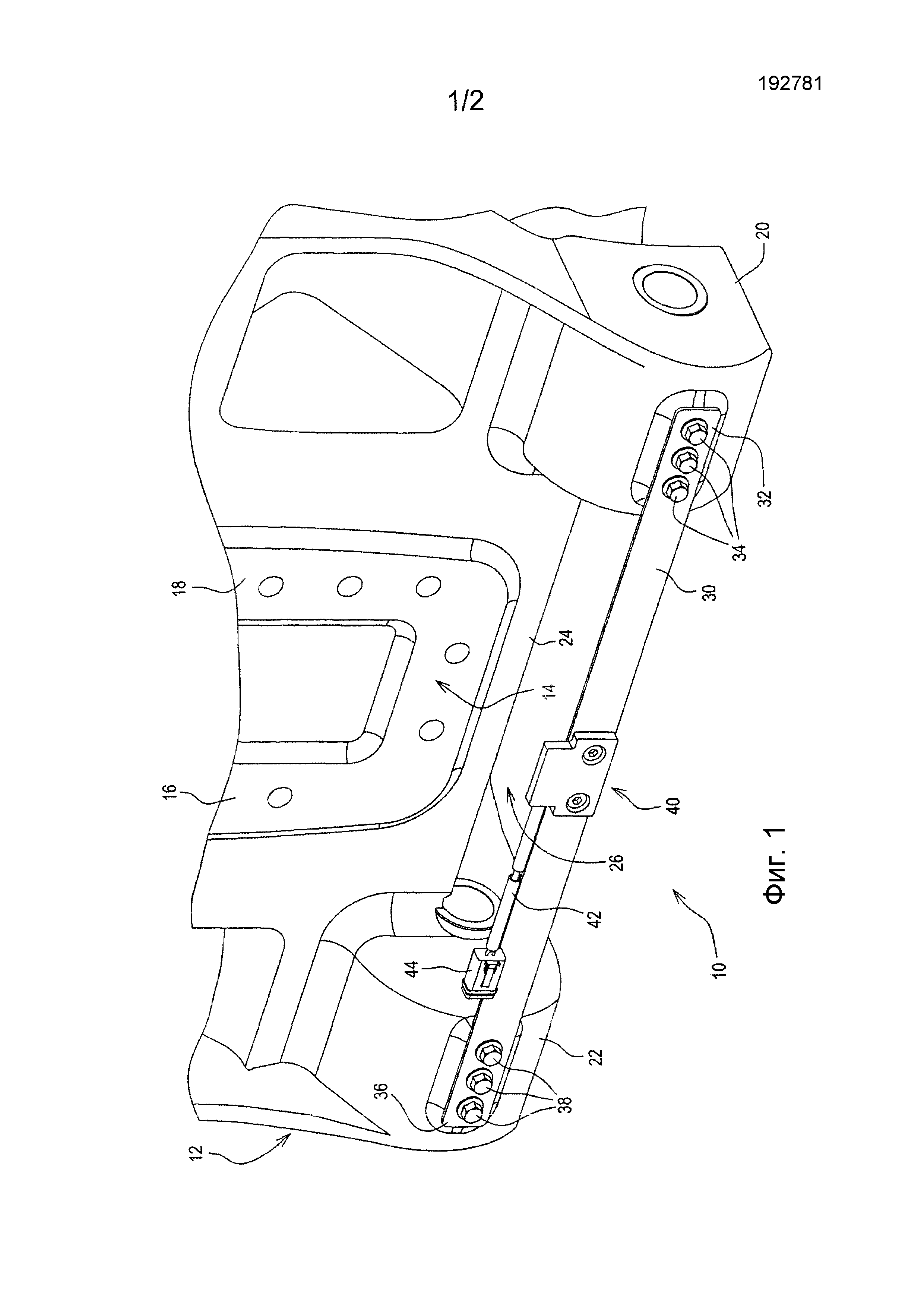
Фиг.1 представляет собой общий вид сбоку механизма измерения тяги, являющегося воплощением изобретения; а
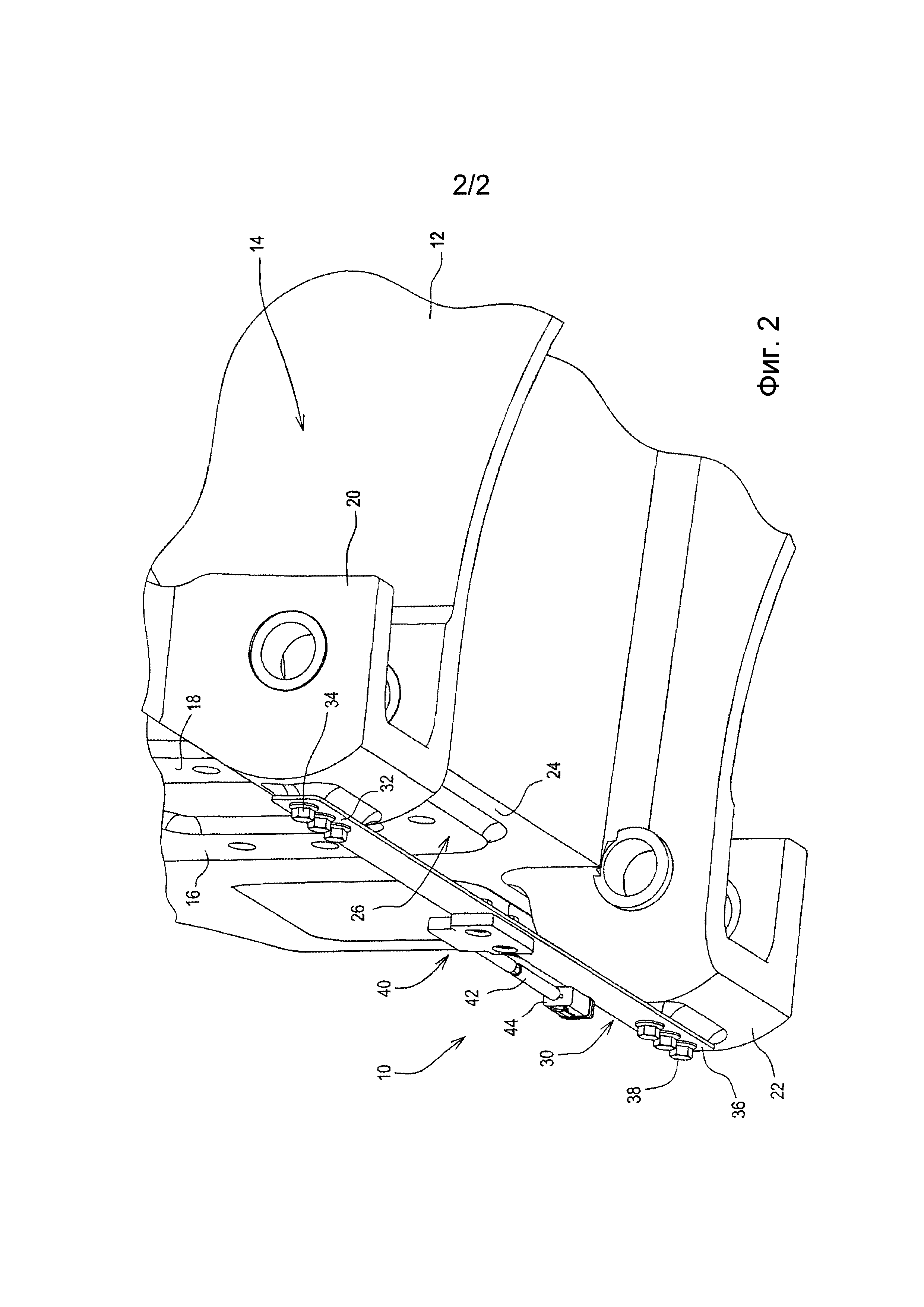
фиг.2 представляет собой вид снизу механизма измерения тяги по фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Со ссылкой на фигуры 1 и 2, механизм 10 измерения тяги прикреплен к тяговой раме 12 рабочего транспортного средства, такого как трактор (не показан). Тяговая рама 12 имеет центральный корпус 14, на котором образованы обращенные вперед монтажные поверхности 16 и 18 для зацепления с обращенными назад монтажными поверхностями (не показаны) рамы трактора (не показана). Тяговая рама 12 также включает в себя левую опору 20 продольной тяги, выступающую из левого переднего угла корпуса 14, и правую опору 22 продольной тяги, выступающую из правого переднего угла корпуса 14. Левая и правая опоры 20 и 22 выполнены с возможностью соединения с соответствующими левой и правой продольными тягами (не показаны). Как лучше всего видно на фиг.1, нижний передний конец 24 корпуса отделен промежутком в направлении назад относительно передних сторон левой и правой опор 20 и 22.
Тяговая накладка 30 имеет левый конец 32, прикрепленный, например, болтами 34, к передней стороне левой опоры 20, и правый конец 36, прикрепленный, например, болтами 38, к передней стороне правой опоры 22. Таким образом, между нижним передним концом 24 корпуса 14 и тяговой накладкой 30 образовано углубление или зазор 26. Также тяговая накладка 30 отделена промежутком в направлении вперед относительно нижнего переднего конца 24 корпуса 14. Тяговая накладка 30 имеет вертикальный размер, больше чем ее продольный размер, а ее жесткость в вертикальном направлении больше, чем ее жесткость в горизонтальном направлении - она является более гибкой в горизонтальном направлении, так что она является более чувствительной к горизонтальным тяговым усилиям. Тяговая накладка 30 будет деформироваться тяговыми усилиями, прикладываемыми к левой и правой опорам 20 и 22.
К передней стороне тяговой накладки 30 клеем и винтами или болтами прикреплен датчик 40 деформации накладки. Например, для присоединения датчика 40 к накладке 30 может быть использован Loctite 638. Предпочтительно датчиком 40 является полный мостовой тензодатчик и предпочтительно многоэлементный прикрепленный болтами датчик деформаций, такой как Series 460 2-Hole Sensor, производимый Datum Electronics. Датчик 40 генерирует сигнал тяги или тягового усилия в ответ на деформацию тяговой накладки 30. Кабель 42 соединяет датчик 40 с традиционным электрическим соединителем 44 для передачи сигнала тяги в систему управления тяги (не показана) трактора (не показан).
Данный механизм 10 измерения тяги механически усредняет горизонтальную тяговую нагрузку между левой опорой 20 продольной тяги и правой опорой 22 продольной тяги. Данная измеренная горизонтальная нагрузка или тяговое усилие используется в качестве входного сигнала в систему управления тягой. Конструкция тяговой рамы 12, левой опоры 20 продольной тяги и правой опоры 22 продольной тяги является гибкой для измерения горизонтальной нагрузки и жесткой в вертикальном направлении нагрузки. Форма тяговой рамы 12 и размещение накладки 30 измерения тяги также помогает максимизации сигнала горизонтальной тяги и минимизации сигнала вертикальной нагрузки. Система измерения тяги требует очень маленького пространства и не требует периодического смазывания и технического обслуживания.
Несмотря на то что раскрытие было подробно проиллюстрировано и описано на чертежах и в приведенном выше описании, подобное иллюстрирование и описание необходимо рассматривать по своему характеру в качестве примерного, а не ограничивающего, причем следует понимать, что были показаны и описаны иллюстративные варианты осуществления и что защиты требуют все изменения и модификации, которые попадают в пределы сущности раскрытия. Следует отметить, что альтернативные варианты осуществления представленного раскрытия могут не включать в себя всех описанных признаков и все-таки получать пользу по меньшей мере от некоторых преимуществ подобных признаков. Рядовые специалисты в данной области легко могут разработать свои собственные варианты осуществления, которые включают один или более признаков представленного раскрытия и попадают в пределы сущности и объема правовых притязаний представленного изобретения, которые определены приложенной формулой изобретения.
Реферат
Изобретение относится к области сельскохозяйственного машиностроения, в частности к устройству для определения тягового усилия, прикладываемого к навесному устройству трактора. Механизм измерения тяги содержит тяговую раму, выполненную с возможностью прикрепления к раме транспортного средства. Тяговая рама имеет левую и правую опоры, выполненные с возможностью соединения с соответствующими левой и правой продольными тягами. Тяговая накладка имеет левый конец, прикрепленный к передней стороне левой опоры, и правый конец, прикрепленный к передней стороне правой опоры. Тяговая накладка может деформироваться в ответ на тяговые усилия, прикладываемые к левой и правой опорам. К тяговой накладке прикреплен датчик тяги. Датчик генерирует сигнал тяги в ответ на деформацию тяговой накладки. Таким конструктивным решением обеспечивается надежность и упрощение его конструкции. 2 н. и 6 з.п. ф-лы, 2 ил.
Комментарии