Приводная система с замкнутой лентой для транспортного средства - RU2378144C2
Код документа: RU2378144C2
Чертежи














Описание
Область техники
Настоящее изобретение относится к приводным системам с замкнутой лентой для транспортных средств и, в частности, к таким приводным системам с замкнутой лентой, которые поворачиваются для управления транспортным средством, к которому они прикрепляются.
Уровень техники
Вседорожные транспортные средства являются транспортными средствами с седлом, называемыми так, потому что они содержат седло, на котором располагается, по меньшей мере, один водитель, сидящий верхом. Как правило, хотя и не обязательно, такие транспортные средства содержат четыре колеса, контактирующие с землей и поддерживающие транспортное средство посредством подвески. Двигатель, поддерживаемый рамой, функционально присоединен к, по меньшей мере, одному колесу для перемещения транспортного средства. Рычаги управления, как правило, шарнирно соединены с рамой перед седлом и функционально соединены с передними колесами для управления транспортным средством. Крылья и обтекатели обеспечивают защиту водителя от вылетающих предметов из-под колес, когда транспортное средство находится в движении.
Как следует из названия, вседорожные транспортные средства предназначены для перемещения по различным типам местностей. Для этой цели они, как правило, оснащены шинами низкого давления (т.е. камерными шинами, в основном имеющими давление менее 138 кПа (или 20 psi)), которые имеют большее пятно контакта с землей. Такое большое контактное пятно снижает давление, оказываемое на грунт шиной. Это низкое давление, приложенное к земле, является преимуществом для таких транспортных средств, так как это позволяет им проходить по таким мягким поверхностям как грязь, песок или снег.
В частности, что касается поверхностей, покрытых снегом, такие камерные шины не всегда являются оптимальными, так как на снегу транспортному средству становится чрезвычайно трудно перемещаться, когда толщина снега на земле становится значительной. Это происходит потому, что, в зависимости от состояния снежной поверхности, может случиться, что давление, приложенное к снежной поверхности даже воздушными шинами, становится слишком большим, чтобы поддерживать транспортное средство. Таким образом, шины начинают утопать в снегу. Чем больше шины утопают в снегу, тем более вероятно, что нижняя часть рамы транспортного средства начнет контактировать со снежной поверхностью. Такая ситуация совершенно нежелательна, так как при соприкосновении рамы со снежной поверхностью на земле начинается непосредственная передача веса транспортного средства на снежную поверхность. Трение между рамой и снегом на земле начинает тормозить транспортное средство при перемещении. Давление, передаваемое на землю шинами, постепенно уменьшается и, следовательно, сила сцепления может снизиться для большего контакта между нижней частью рамы и землей.
Более того, колеса имеют меньшее сцепление при увеличении торможения и их трение со снежной поверхностью уменьшается. Шины начинают скользить по снежной поверхности, в то время как транспортное средство начинает больше и больше поддерживаться рамой, непосредственно контактирующей со снегом на земле, пока шины полностью не потеряют сцепление со снегом - затем транспортное средство застревает.
Известным вариантом в данной области техники является замена колес системой с замкнутой лентой (или гусеничной системой), когда транспортное средство предназначено для использования в условиях снега. Существует множество типов таких систем. Например, некоторые системы с замкнутой лентой предназначены для установки поверх колес вседорожных транспортных средств. Иногда дополнительно требуется установить на существующее транспортное средство либо набор дополнительных колес, либо систему поддержки гусеницы. Другие системы с замкнутой лентой предназначены для полной замены колес.
Замена колес системами с замкнутой лентой обеспечивает большую площадь контакта (пятно) с грунтом по сравнению с размером площади контакта (пятна) колеса с грунтом - даже с камерной шиной низкого давления. Проходимость по снегу увеличивается, а нижняя часть поддерживается на большем расстоянии от поверхности снега. Транспортное средство может использоваться при более глубоком слое снега, поскольку обеспечены проходимость и сцепление.
Такие системы, помимо положительных сторон, имеют свои недостатки. Во-первых, размер пятна контакта также влияет на простоту управления транспортным средством. На колесных или гусеничных транспортных средствах колеса, которые управляют транспортным средством, поворачиваются вокруг точки поворота на земле (более точно вокруг оси управления), зависящей от геометрии рулевого управления транспортного средства. Область контакта колеса или гусеницы, расположенной вокруг точки поворота на земле управляющих колес, противодействует за счет трения вращательному движению колеса или гусеницы вокруг точки поворота. Таким образом, чем больше область контакта на земле, тем больше площадь образования трения, которое противодействует движению вокруг центра поворота, и тем труднее повернуть «пятно» вокруг оси поворота. Следовательно, большая область контакта на земле в результате применения системы с замкнутой лентой влечет за собой увеличение усилия, необходимого для управления транспортным средством.
Другая трудность состоит в том, что некоторые системы с замкнутой лентой жестко соединены с рамой транспортного средства. Это предотвращает повторение системами неровной местности, по которой следует транспортное средство. В известных системах, которые прикреплялись к раме шарнирно, раньше они всегда прикреплялись шарнирно к тому, что было ступицей колеса, если прикреплялось колесо. Это означает, что система должна совершать большие перемещения, чтобы двигаться по форме местности, что еще не является оптимальным. В другом типе системы создаваемая сила сцепления несколько ограничена, так как область контакта замкнутой ленты не способна приспосабливаться к несовершенствам грунта.
В итоге, как правило, данные системы с замкнутой лентой применяются на транспортных средствах, которые предназначены для установки колес. Обычно такие ленточные системы продаются как дополнительное оборудовании, но не самими производителями оборудования. Таким образом, подвеска, трансмиссия, рулевой привод и т.д. были разработаны для соответствия нагрузкам, создаваемым колесами, и не обязательно системами с лентой. Обычно системы с лентой создают большие механические нагрузки, так как они тяжелее, чем колеса, и требуют большего усилия для управления. При некоторых обстоятельствах на некоторых транспортных средствах требуются усовершенствования для удовлетворения таких нагрузок.
Соответственно, остается необходимость в усовершенствовании системы с замкнутой лентой для транспортных средств и, в частности, вседорожных транспортных средств, что исключит некоторые трудности, связанные с системами предшествующего уровня техники.
Краткое описание изобретения
В настоящем изобретении сделаны попытки исключить некоторые из упомянутых выше недостатков. Следует отметить, что в настоящем описании описаны различные признаки настоящего изобретения. Следует понимать, что каждый признак соответствует аспекту настоящего изобретения, при этом настоящее изобретение содержит много аспектов. Таким образом, нет необходимости, чтобы все признаки присутствовали в каждом варианте воплощения настоящего изобретения. По этой причине нет необходимости, чтобы каждый вариант воплощения устранял или улучшал каждый недостаток предшествующего уровня техники, отмеченный далее.
Соответственно, в одном аспекте один или более вариантов воплощений настоящего изобретения предусматривает приводную систему для транспортного средства, которое содержит раму, имеющую переднюю часть, заднюю часть и продольную ось; двигатель, поддерживаемый рамой; сиденье, опирающееся на раму для размещения водителя; управляемое вручную рулевое устройство, шарнирно присоединенное к раме для получения усилия, прилагаемого к рулю, от водителя; приводную систему, включающую в себя раму приводной системы, функционально соединенную с рамой транспортного средства так, чтобы была возможность совершать поворотные движения относительно рамы транспортного средства относительно продольной оси транспортного средства так, чтобы можно было поворачивать приводную систему для управления транспортным средством, приводную систему, функционально присоединенную к рулевому устройству транспортного средства; замкнутую ленту зацепления с грунтом, расположенную на раме приводной системы с возможностью перемещения и функционально соединенную с двигателем для перемещения транспортного средства; и когда приводная система соединена с транспортным средством, и когда транспортное средство находится на ровной местности, приводная система содержит ось управления, вокруг которой поворачивается приводная система для управления транспортным средством, ось нагрузки, образованную результирующей нагрузкой, статически эквивалентной распределению нагрузок по области контакта замкнутого ремня с грунтом, и точка пересечения оси средней нагрузки и грунта находится продольно впереди точки пересечения проекции оси управления на грунт и грунта, в результате чего приводная система имеет отрицательное линейное отставание.
Следует отметить, что хотя настоящее изобретение было описано в связи с вседорожными транспортными средствами, предполагается, что оно может быть установлено на другие типы транспортных средств, имеющих подобные недостатки, такие как тракторы.
Предпочтительно, чтобы продольное расстояние между точкой пересечения оси нагрузки и грунта и точкой пересечения проекции оси управления на грунт и грунта не превышало 250 мм. Более предпочтительно, чтобы данное расстояние не превышало 150 мм. Еще более предпочтительно, чтобы это расстояние было не меньше 10 мм и не больше 100 мм. Наиболее предпочтительно, чтобы данное расстояние было не меньше 40 мм и не превышало 45 мм.
Также предпочтительно, чтобы настоящие приводные системы дополнительно включали в себя направляющую, шарнирно закрепленную на раме приводной системы, вокруг которой расположен замкнутый ремень, при этом направляющая шарнирно закреплена на раме приводной системы вокруг шарнирной оси и ось нагрузки пересекает шарнирную ось. Также является предпочтительным, чтобы поворотное перемещение направляющей вокруг шарнирной оси было ограниченно ограничителем.
Дополнительно, предпочтительно, чтобы натяжитель ремня был связан с замкнутой лентой для поддержания постоянного натяжения, вне зависимости от поворотного движения направляющей.
Также предпочтительно, чтобы угол наклона оси управления был положительным.
Как было сказано ранее, настоящее изобретение применяется, в частности, на вседорожных транспортных средствах, которые включают в себя раму, содержащую переднюю часть, заднюю часть и продольную ось; двигатель, поддерживаемый рамой; седло, опирающееся на раму, для размещения водителя; руль, с возможностью поворота прикрепленный к раме для получения усилия, прилагаемого к рулю, от водителя. При этом приводные системы, описанные выше, находятся как на передней левой стороне, так и на передней правой стороне транспортного средства.
На таких транспортных средствах предпочтительно, чтобы ограничитель угла управления ограничивал угол управления, по меньшей мере, одной приводной системы, и ограничитель угла управления, расположенный на транспортном средстве, был такой, чтобы сцепление управления транспортного средства не подвергалось воздействию усилия, создаваемого при зацеплении ограничителя.
В другом аспекте, один или более вариантов воплощений настоящего изобретения создает приводную систему для транспортного средства, содержащего раму, включающую в себя переднюю часть, заднюю часть и продольную ось; двигатель, поддерживаемый рамой; седло, опирающееся на раму для размещения водителя; и управляемое вручную рулевое устройство, шарнирно прикрепленное к раме для принятия усилия, прилагаемого к рулю, от водителя; причем приводная система включает в себя раму приводной системы, функционально прикрепленную к раме транспортного средства для обеспечения возможности поворотного движения относительно рамы транспортного средства относительно продольной оси транспортного средства так, чтобы приводная система могла поворачиваться для управления транспортным средством, и обеспечения невозможности вращательного движения относительно рамы транспортного средства в плоскости, параллельной продольной оси и нормальной к грунту, когда транспортное средство находится на плоской площадке и управляется по прямой; направляющую, шарнирно прикрепленную к раме приводной системы; замкнутую ленту зацепления с грунтом в подвижном зацеплении с направляющей с тем, чтобы область контакта ленты с грунтом была ниже направляющей, когда транспортное средство находится на плоском грунте, при этом лента функционально соединена с двигателем для перемещения транспортного средства; при этом приводная система функционально соединена с рулевым устройством транспортного средства.
В таких аспектах предпочтительно, чтобы приводная система дополнительно включала в себя множество колес, вокруг которых располагается лента, и чтобы колеса соединялись с направляющей так, чтобы одновременно вращательно перемещаться с ними относительно рамы приводной системы. Ограничитель может ограничивать поворотное перемещение направляющей. Также предпочтительно, чтобы натяжитель ремня был соединен с бесконечной лентой для поддержания натяжения ленты постоянным, вне зависимости от поворотного перемещения направляющей.
Предпочтительно, чтобы направляющая шарнирно прикреплялась к раме приводной системы вокруг поворотной оси и чтобы ось средней нагрузки, которая является нормальной проекцией на грунт точки приложения средней нагрузки нагрузок по области контакта ремня с землей, пересекала поворотную ось.
Как было указано выше, настоящее изобретение применяется, в частности, на вседорожных транспортных средствах, которые включают в себя раму, содержащую переднюю часть, заднюю часть и продольную ось; двигатель, поддерживаемый рамой; седло, опирающееся на раму для размещения водителя; руль, шарнирно соединенный с рамой для принятия усилия, прилагаемого к рулю, от водителя; первую приводную систему, как указано в любом из пунктов формулы изобретения 12-16, на передней левой стороне транспортного средства; и вторую приводную систему, как указано в любом из пунктов формулы изобретения 12-16, на передней правой стороне транспортного средства.
Предпочтительно, чтобы такие транспортные средства имели ограничитель угла управления, ограничивающий угол управления, по меньшей мере, одной из приводных систем, и чтобы ограничитель угла управления располагался на транспортном средстве таким образом, чтобы сцепление управления транспортного средства не подвергалось воздействию усилия, создаваемого при зацеплении ограничителя.
В еще одном аспекте, один или более вариантов воплощений настоящего изобретения предусматривают транспортное средство, включающее в себя раму, содержащую переднюю часть, заднюю часть и продольную ось; двигатель, поддерживаемый рамой; седло, опирающееся на раму для размещения водителя; управляемое вручную рулевое устройство, шарнирно соединенное с рамой, для принятия усилия, прилагаемого к рулю, от водителя; систему подвески, с возможностью перемещения присоединенную к раме и включающую в себя амортизирующий элемент; приводную систему, соединенную с системой подвески и выполненную с возможностью поворотного движения относительно продольной оси рамы для управления транспортным средством, причем приводная система функционально соединена с рулевым устройством и включает в себя множество колес; замкнутую ленту зацепления с грунтом, поворачивающуюся вокруг множества колес; ограничитель угла управления, ограничивающий угол управления приводной системы и расположенный на транспортном средстве так, чтобы сцепление рулевого управления транспортного средства не подвергалось усилию, созданному при зацеплении ограничителя.
Предпочтительно, чтобы приводная система дополнительно включала в себя направляющую, с которой лента находится в подвижном зацеплении.
Предпочтительные положения установки ограничителя находятся на раме, приводной системе и подвеске.
Как было показано ранее, настоящее изобретение применяется, в частности, на вседорожных транспортных средствах, в которых сиденье является седлом, а рулевое устройство - рулем.
Дополнительно и/или в другом варианте преимущества и отличительные признаки настоящего изобретения станут очевидны из следующего подробного описания, которое вместе с прилагаемыми чертежами раскрывают предпочтительные варианты воплощения настоящего изобретения.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения, а также его других целей и отличительных признаков сделана ссылка на следующее описание, которое следует использовать вместе с прилагаемыми чертежами, на которых:
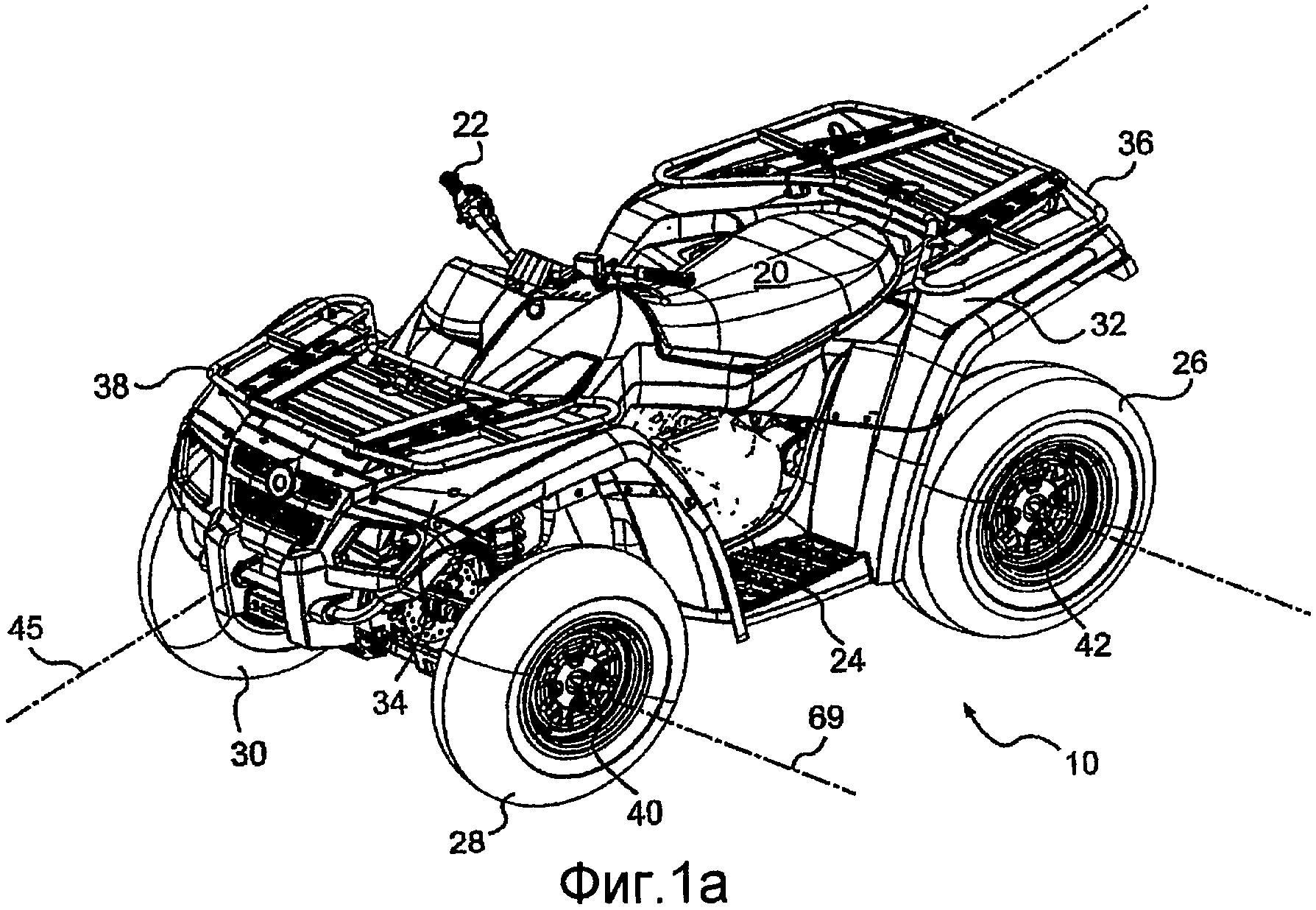
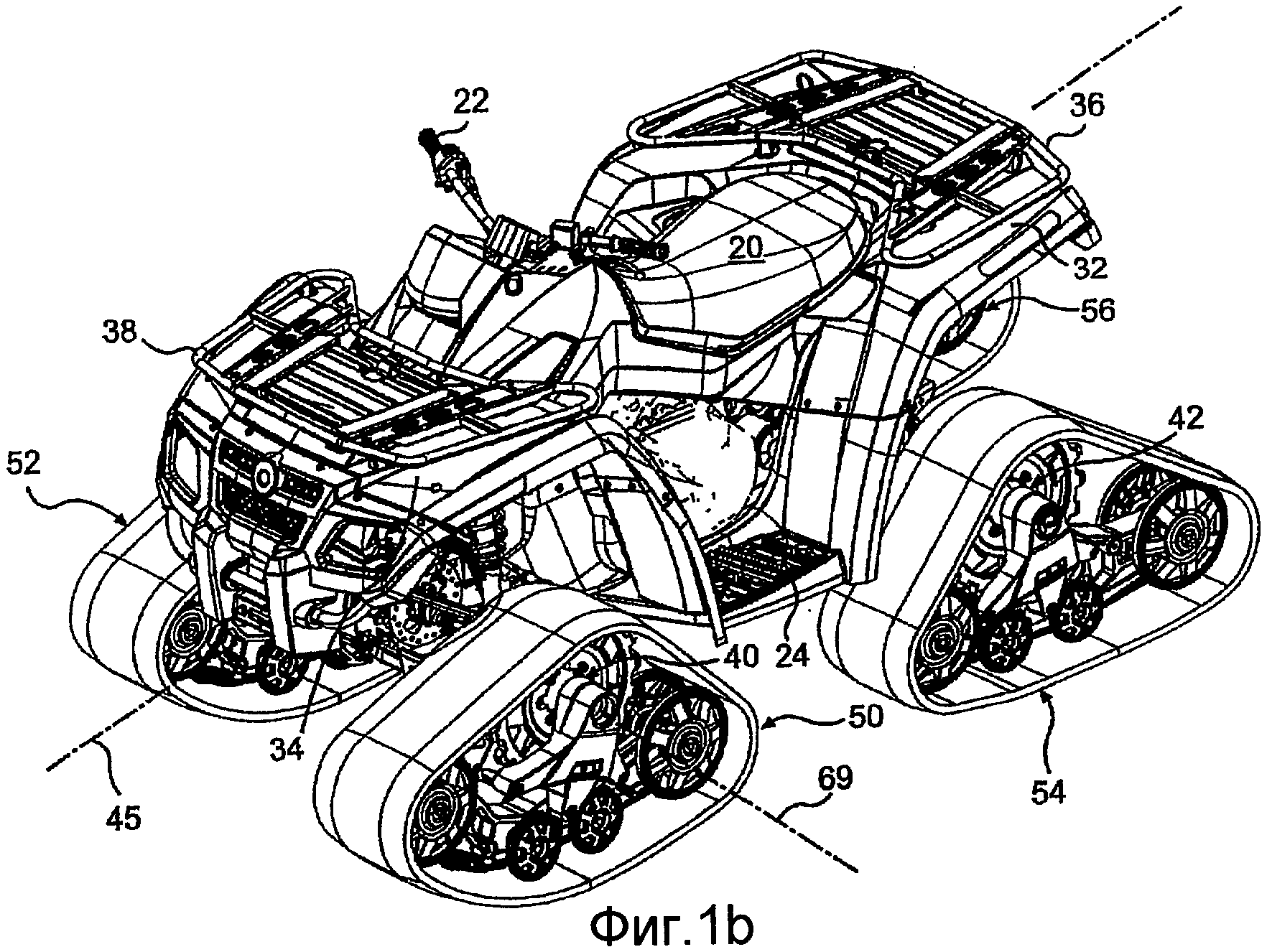
фиг.1a и 1b показывают фронтальную левую боковую вертикальную проекцию вседорожного транспортного средства согласно одному варианту воплощения настоящего изобретения. При этом фиг.1a показывает вседорожное транспортное средство с колесами, а фиг.1b показывает вседорожное транспортное средство с системой с замкнутой лентой, заменяющей колеса;
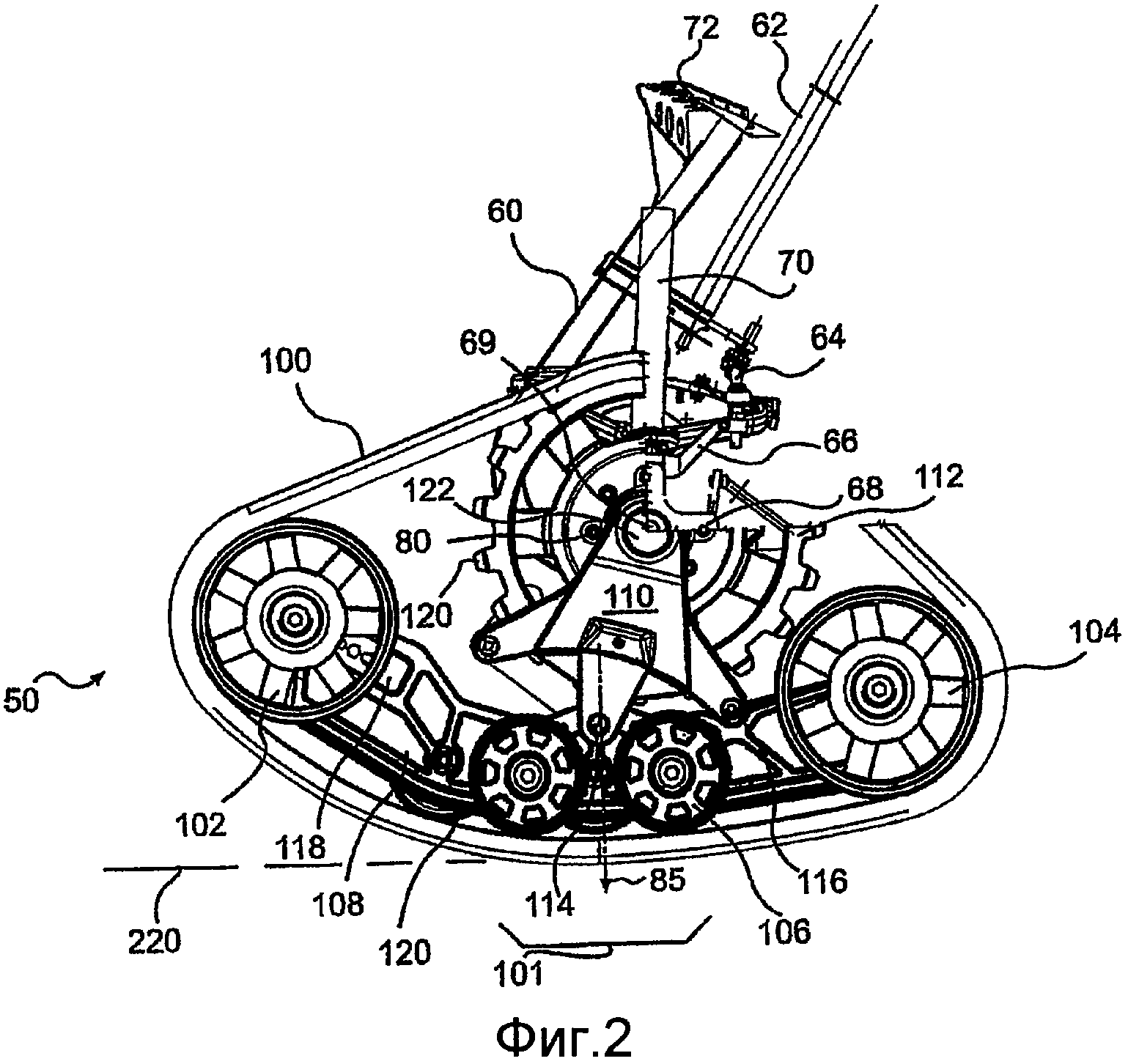
фиг.2 показывает фронтальный левый боковой вид части вседорожного транспортного средства с системой с замкнутой лентой на передней левой части вседорожного транспортного средства с разрезом, позволяющим увидеть рулевое сцепление позади гусеницы;
фиг.3a показывает фронтальную проекцию левой стороны вседорожного транспортного средства с системой с замкнутой лентой, выровненной для установки на переднюю левую ступицу вседорожного транспортного средства, взамен колеса;
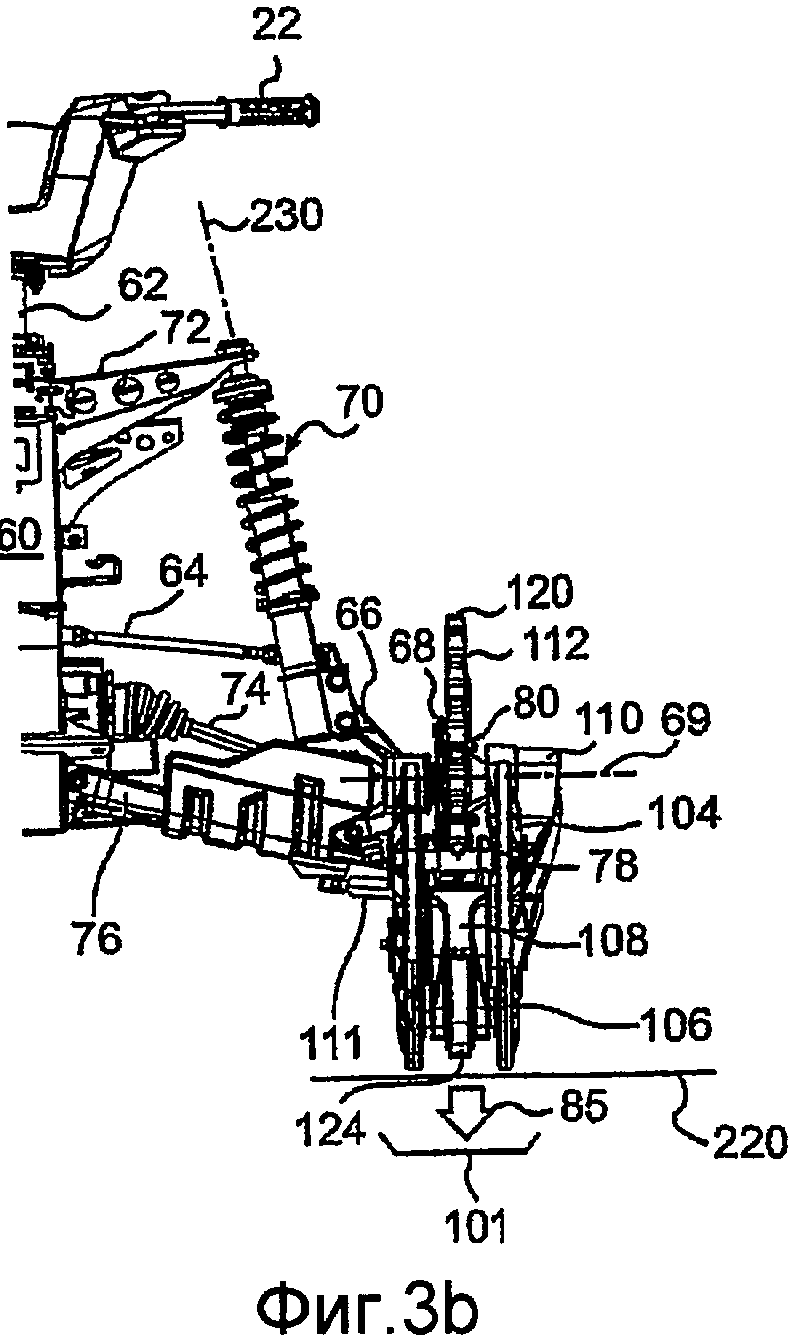
фиг.3b показывает фронтальную проекцию левой стороны вседорожного транспортного средства с подвеской MacPherson с системой с замкнутой лентой, установленной на переднем левом шпинделе;
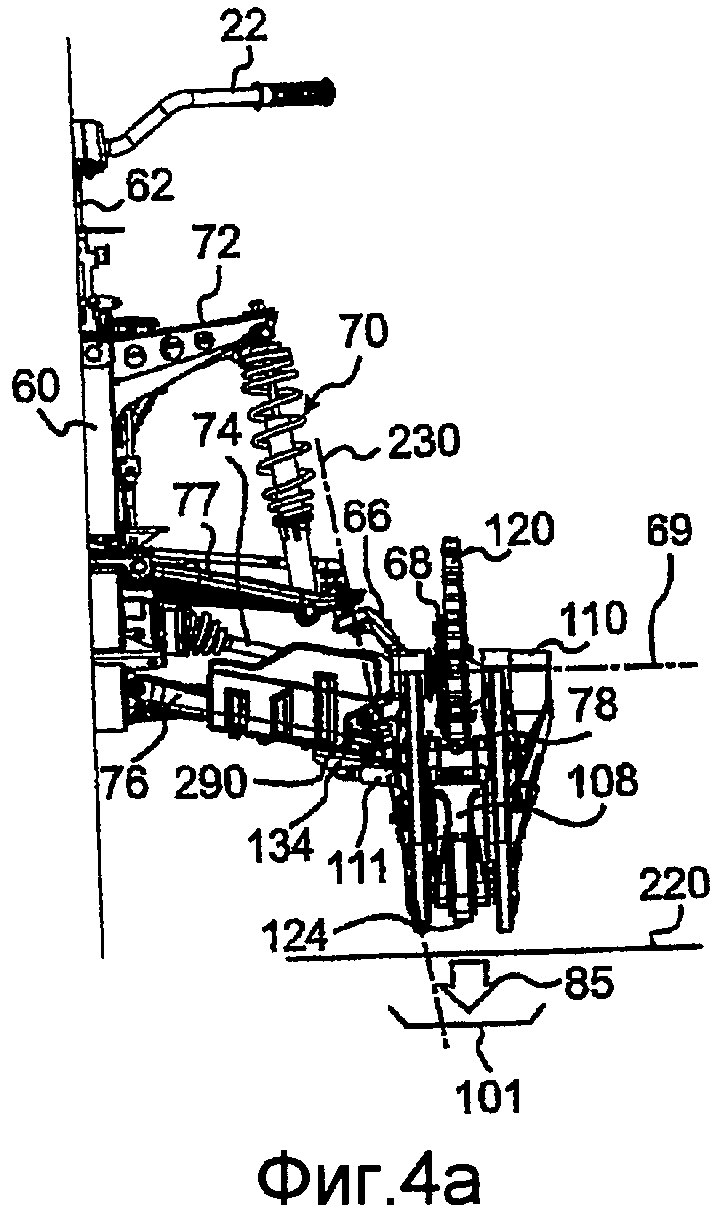
фиг.4a показывает фронтальную проекцию левой стороны вседорожного транспортного средства, имеющего подвеску со сдвоенными А-рычагами с системой с замкнутой лентой, установленной на переднем левом шпинделе;
фиг.4b показывает фронтальную проекцию левой стороны вседорожного транспортного средства, имеющего подвеску MacPherson с колесом, установленным на переднем левом шпинделе;
фиг.5a-5c показывают левую боковую проекцию передней системы с замкнутой лентой, иллюстрируя различные углы для системы с замкнутой лентой и ее контактной области;
фиг.6 показывает вид снизу справа спереди системы с замкнутой лентой, установленной на вседорожном транспортном средстве;
фиг.6a показывает вид сверху левой передней стороны вседорожного транспортного средства с колесом;
фиг.6b показывает вид сверху левой передней стороны вседорожного транспортного средства с управляемым колесом;
фиг.6c показывает вид сверху левой передней стороны вседорожного транспортного средства с замкнутой лентой;
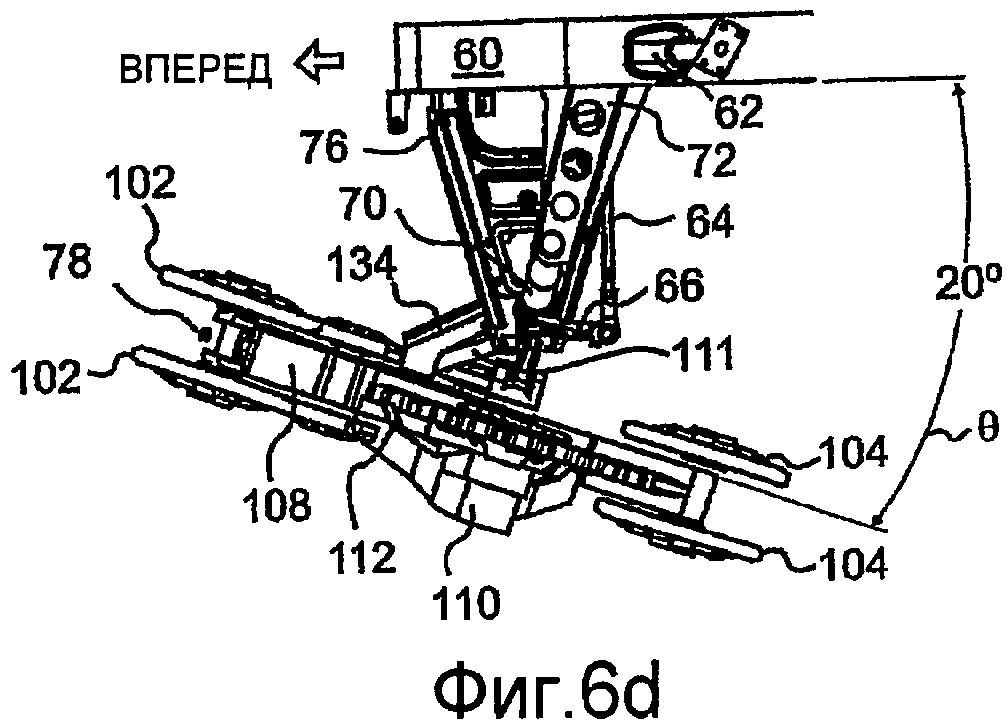
фиг.6a показывает вид сверху левой передней стороны вседорожного транспортного средства с управляемой замкнутой лентой;
фиг.7 показывает вид с разнесением деталей набора передней гусеницы;
фиг.8 показывает вид с разнесением деталей набора задней гусеницы;
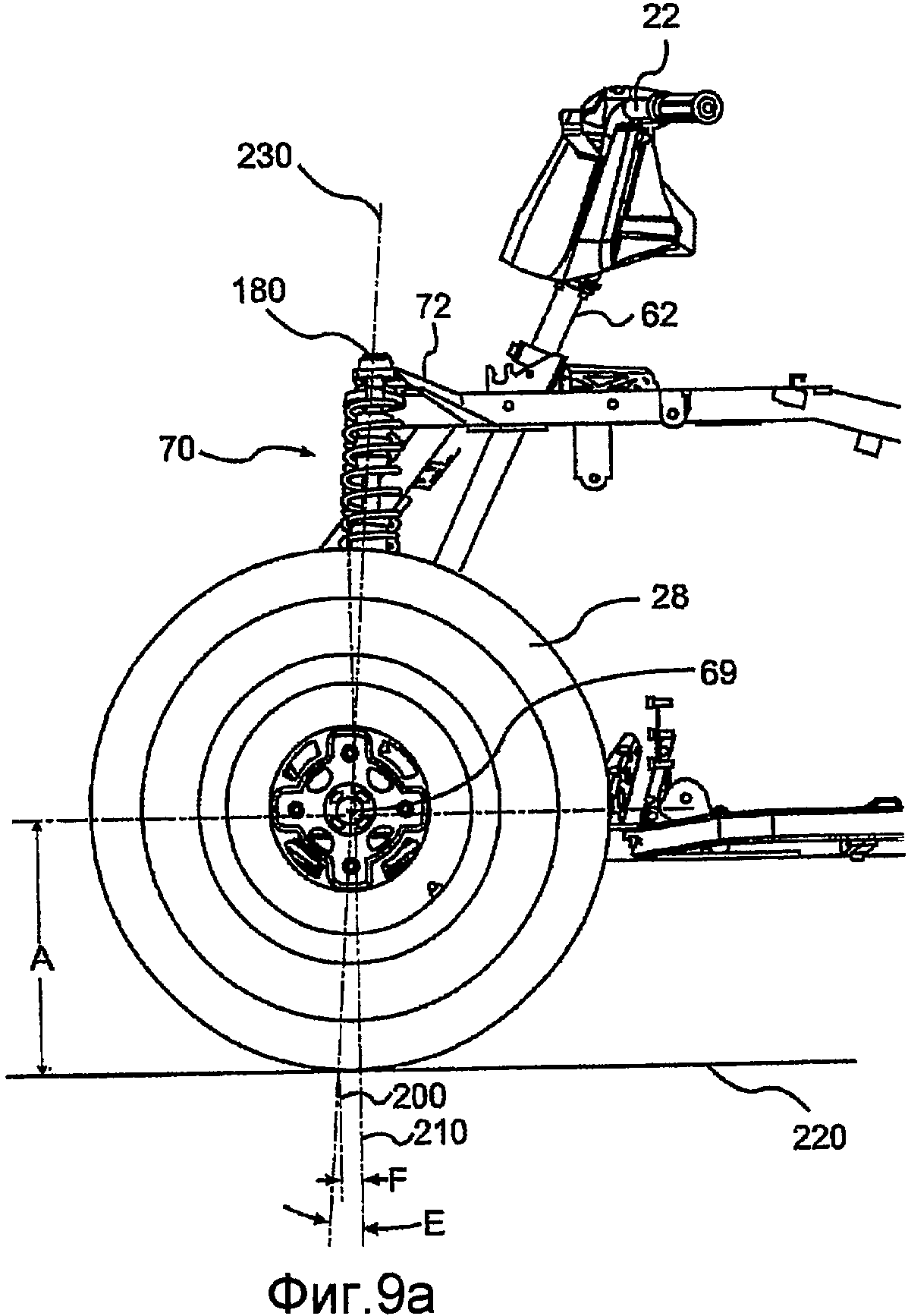
фиг.9a показывает проекцию слева вседорожного транспортного средства с колесом и шиной и показывает различные геометрии рулевого управления и подвески;
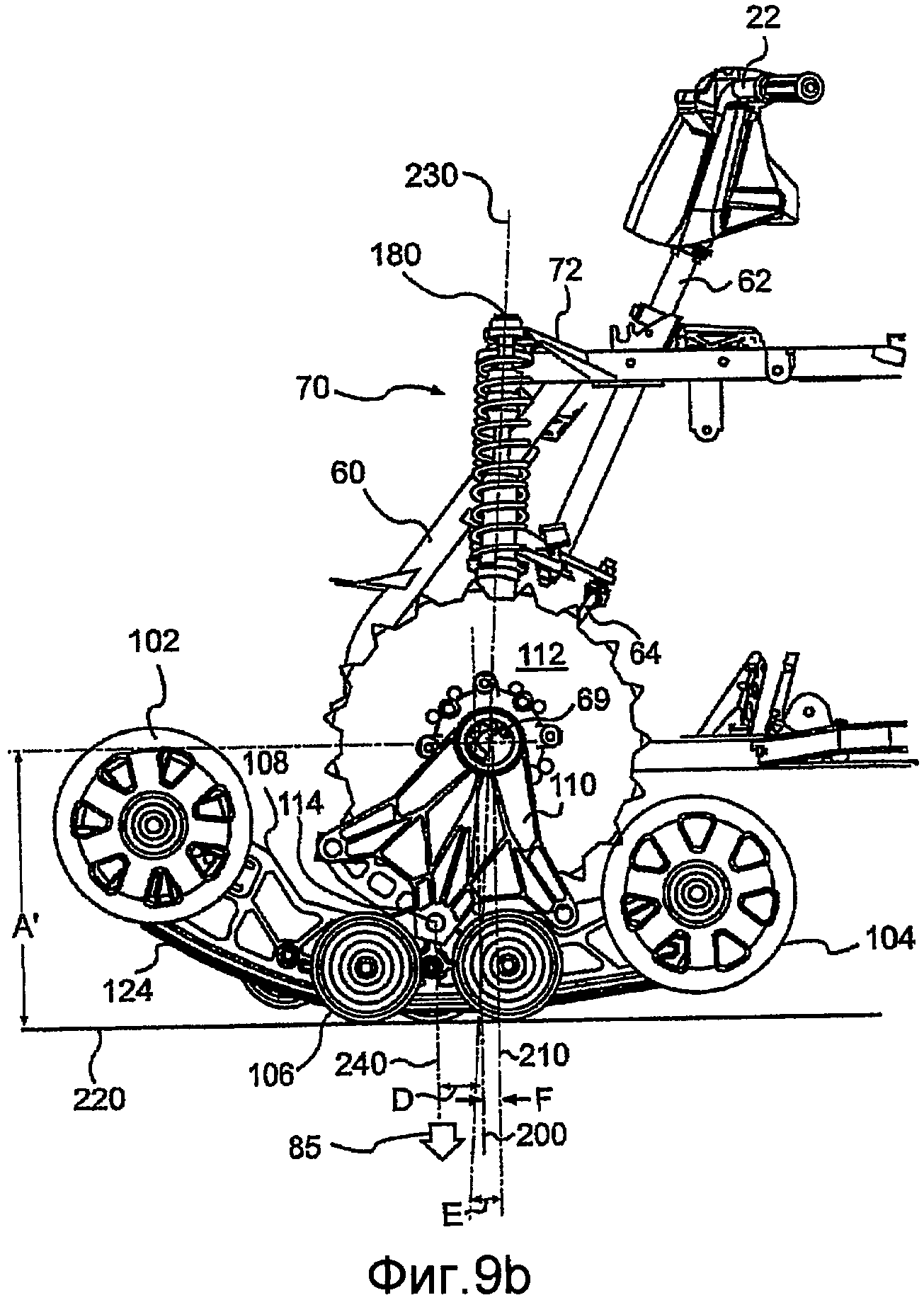
фиг.9b показывает проекцию слева системы с замкнутой лентой, установленной на вседорожном транспортном средстве с удаленной лентой, и иллюстрирует различные геометрии устройства управления и подвески;
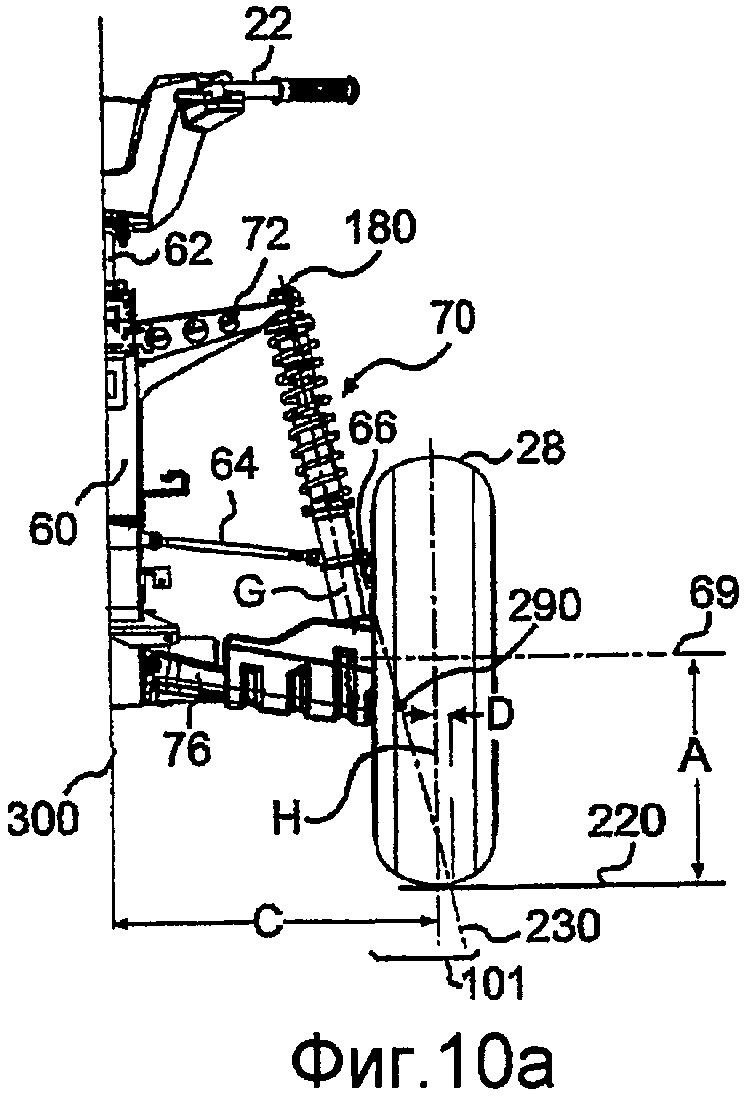
фиг.10a показывает фронтальную проекцию левой стороны вседорожного транспортного средства с установленным колесом и шиной, показывающую геометрии устройства управления и подвески;
фиг.10b показывает фронтальную проекцию левой стороны системы замкнутой ленты, установленной на вседорожном транспортном средстве с удаленной замкнутой лентой, и показывает геометрии устройства управления и подвески;
фиг.11a показывает профиль замкнутой ленты, применяемой для управления транспортным средством; и
фиг.11b показывает профиль замкнутой ленты, не применяемой для управления транспортным средством.
Подробное описание предпочтительных вариантов воплощения настоящего изобретения
Фиг.1a изображает вседорожное транспортное средство 10, содержащее седло 20 для размещения одного или более водителей. Водитель (не показан), сидящий верхом, может держать руль 22 для управления транспортным средством. Рама 60 поддерживается четырьмя колесами (три из них видны на фиг.1a) 26, 28 и 30, находящимися на расстоянии от продольной оси 45 транспортного средства. Передние колеса связаны с передней осью 40 и осью 69 ступицы и функционально связаны с двигателем посредством передней приводной системы, прикрепленной к передней части рамы. Задние колеса связаны с задней осью 42 и функционально связаны с двигателем посредством задней приводной системы, прикрепленной к задней части рамы. При эксплуатации водитель ставит ноги на подножки 24, расположенные на каждой боковой стороне транспортного средства. Водитель защищен от вылетающих предметов из-под колес передними крыльями 34 и задними крыльями 32. Передний и задний багажник 38, 36 предназначены для перевозки груза на транспортном средстве.
Фиг.1b показывает транспортное средство с системой с замкнутой лентой, заменяющей каждое из этих четырех колес. Каждая система с замкнутой лентой может быть (но не всегда обязательно) функционально связана с двигателем для приведения в движение транспортного средства, обеспечения тяги транспортного средства и обеспечения максимальной проходимости и оптимальной тяги на мягком грунте. Система 50 с замкнутой лентой заменила переднее левое колесо, в то время как системы 52, 54 и 56 с замкнутой лентой заменили переднее правое колесо, левое заднее колесо и правое заднее колесо соответственно.
Более точное изображение системы 50 ленты представлено на фиг.2. Система 50 с замкнутой лентой с возможностью разъединения связана со ступицей 68 крепежами 80. Ступица 68 шарнирно удерживается кулачком 66. Ступица 68 предварительно соединяет переднее левое колесо 28 с транспортным средством и обеспечивает вращательное движение колеса. С помощью системы 50 с замкнутой лентой вращательное движение ступицы 68 передается на зубчатое колесо 112, которое поворачивает замкнутую ленту 100 (или гусеницу) вокруг оси 69 ступицы и оси 122 зубчатого колеса посредством головок 120, которые контактируют с соответствующим рельефом на ленте 100, подобно задней приводной системе снегохода. Замкнутая лента 100 удерживается на месте зубчатым колесом 112 у верхней части ленты и угловыми колесами 102, 104 у передней и задней части замкнутой ленты. Угловые колеса угла предпочтительно имеют диаметр 25 см, однако в рамках настоящего изобретения возможны различные диаметры колеса. Поддерживающие колеса 106 удерживают нижнюю часть ленты 100 на месте и ограничивают трение между лентой и направляющей 108 при поддерживании транспортного средства на земле.
Угловые колеса 102, 104 и поддерживающие колеса 106 удерживаются в своем положении посредством направляющей 108 и звена 110 (которое в этом варианте воплощения следует рассматривать как раму). Поддерживающие колеса настоящего варианта воплощения имеют диаметр приблизительно 10-15 см. В рамках настоящего изобретения могут применяться различные диаметры колес. Направляющая шарнирно соединена со звеном 110, таким образом обеспечивая возможность угловых изменений области 101 контакта для прохождения замкнутой ленты по несовершенной или неровной поверхности грунта, по которому может следовать транспортное средство.
Звено 110 изготовлено из алюминия путем литья для достижения низкой стоимости, небольшого веса и сопротивления к коррозии. Могут использоваться волоконные пластмассы (чтобы получить улучшенную жесткость) или другие материалы и/или процессы не выходя за рамки настоящего изобретения. В настоящем варианте воплощения направляющая 108 выполнена из ультравысокомолекулярного материала посредством компрессионного формования.
Область 101 контакта соответствует замкнутой ленте как пятно контакта шине. Область контакта является частью замкнутой ленты, которая большую часть времени контактирует с грунтом и через которую (в большинстве случаев) передается нагрузка (вращательное движение направляющей будет обсуждаться далее по тексту). Звено 110 поддерживается роликовыми подшипниками (не показаны на фиг.2, но показаны на фиг.7) выше оси 69 ступицы, означая, что ступица может поворачивать зубчатое колесо 112, не поворачивая звено 110. Поэтому звено 110 может передавать нагрузку, приложенную к транспортной системе транспортным средством от ступицы 68 и кулачка 66, и защищена от поворота отдельным запорным соединителем 111, присоединенным к транспортному средству посредством втулки 140 (не показана на фиг.2, но показана на фиг.6).
Дополнительно со ссылкой на фиг.2 следует отметить, что в большинстве случаев системы с замкнутой лентой, установленные на передней части транспортного средства, должны быть управляемыми. Рулевая колонка 62, присоединенная на одном конце к рулями 22, а на другом конце - к управляющему звену 64 перемещает кулачок 66, как в случае, когда колеса находились на транспортном средстве. Также со ссылкой на фиг.2 рама 60 показана с верхним соединителем 72 подвески MacPherson.
Фиг.3а показывает разобранную систему 50 с замкнутой лентой, заменяющую колесо 28. Можно видеть крепежи 80 на ступице 68. Ступица вращается посредством полуоси 74, которая передает мощность от двигателя через передний ведущий вал и передний дифференциальный механизм. Можно оценить, что система подвески, представленная в варианте воплощении на фиг.3а является подвеской MacPherson. Этот тип подвески имеет амортизатор 70 (подпорку), присоединенный между рамой 60 (посредством соединителя 72) и нижним А-рычагом 76 (через кулачок 66). У нижней части вала прикреплен ползунок 124, изготовленный из фрикционного материала для снижения большого трения между звеном 110 и замкнутой лентой 100, когда лента не может быть полностью удержана поддерживающими колесами 106. Дополнительно, имеется механизм 78 регулирования для установки натяжения замкнутой ленты 100 посредством разведения переднего и заднего угловых колес. В этом варианте воплощения болт на механизме 78 регулирования может поворачиваться для установки положения оси переднего углового колеса. Это изменяет периферийное расстояние для всех угловых колес, поддерживающих колес и зубчатого колеса. Таким образом, замкнутая лента может быть удалена с механической конструкции гусеничной системы для ее обслуживания и поставлена на место с требуемым натяжением.
Фиг.3b показывает гусеничную систему с фиг.3a, установленную на левой передней ступице вседорожного транспортного средства. Запорный соединитель 111 соединяет звено 110 с нижним А-рычагом 76 для предотвращения относительного движения между звеном и А-рычагом. Соединение запорного соединителя 111 под нижним А-рычагом 76 предпочтительно располагается на одной линии с управляющей осью 230 (будет описана ниже) для исключения других перемещений системы с замкнутой лентой при управлении транспортным средством. Если соединение запорного соединителя 111 находится не на одной линии с управляющей осью 230, то система с замкнутой лентой не будет перемещаться только в соответствии с управляющим перемещением.
Соединение запорного соединителя 111 с рычагом 76 подвески может находиться не на одной линии с управляющей осью 230 и обеспечивать желательный эффект. Например, самоцентрирование управления может быть усилено, если соединение запорного соединителя 111 с транспортным средством расположено рядом с управляющейся осью. При этом звено 110 будет немного поворачиваться вокруг оси 69 ступицы при управлении транспортным средством. В зависимости от расположения запорного соединителя 111 на транспортном средстве, задний угловой ограничитель 116 контактирует с направляющей 108, таким образом перемещая вниз задний конец замкнутой ленты, который находится на внешней стороне, при движении транспортного средства на повороте.
Фиг.4a показывает ту же самую компоновку, как представлено на фиг.3b, но без применения подвески со сдвоенным А-рычагом. Кулачок 66 соединен на его верхней части с верхним концом А-рычага 77. Верхний край амортизатора 70 связан с соединителем 72, а его нижний край соединен с верхним концом А-рычага 77. фиг.4b показывает тот же вид, как представлено на фиг.3b с установленным колесом.
Фиг.5a, 5b и 5c показывают поворотное движение направляющей 108 относительно звена 110. Направляющая может поворачиваться по оси 114 поворота и содержит два угловых ограничителя, которые образуются как ограничитель 118 передней части звена и ограничитель 116 задней части звена. Вращательное движение ограничено, когда либо передний, либо задний ограничитель 118, 116 угла входит в контакт с направляющей 108. Фиг.5a показывает предел на одной стороне вращательного движения; задняя часть 116 звена, находится в контакте с направляющей 108, таким образом обеспечивая α0=0°. Фиг.5b представляет промежуточный угол α при поворотном движении; ни передняя, ни задняя части 118, 116 звена не контактируют с направляющей 108. В этом диапазоне система замкнутой ленты функционирует большую часть времени для соответствия углу области 101 контакта условиям грунта. Фиг.5 с показывает предел поворотного движения на другой стороне; передняя часть 118 звена находится в контакте с направляющей 108, и αmax равно максимальному угловому смещению. В представленном варианте αmax составляет от 22 до 25°. В остальном, на плоской горизонтальной поверхности с областью 101 контакта, по существу параллельной грунту, при α0=0°, задняя часть 116 звена находится в контакте с направляющей 108. Это означает, что угловое смещение, в основном, произошло вперед для повышения стабильности. Угловое смещение α, показанное в этом варианте воплощения, является примером возможного смещения. В рамках настоящего изобретения возможны другие изменения угла α', а также другие средства ограничения перемещения направляющей. Кроме того, направляющая 108 в этом варианте воплощения поддерживает замкнутую ленту в положении на гусеничной системе, позволяя осуществлять угловое изменение области 101 контакта замкнутой ленты. Дополнительно, периферийное расстояние между зубчатым колесом 112, угловыми колесами 104, 104 и поддерживающими колесами 106 остается по существу тем же самым, когда изменяется угол α. Это предотвращает изменение натяжения замкнутой ленты. Кроме того, угол α ограничивается, чтобы исключить взаимодействие замкнутой ленты с защитными крыльями транспортного средства.
Масса 85 транспортного средства не передается по вертикали вдоль оси 69 ступицы. Шарнир 114, шарнирно соединяющий направляющую 108 со звеном 110, расположен там, где нагрузка транспортного средства 85 вертикально передается на грунт, когда значение угла α находится в диапазоне от α0 до αmax. Поэтому ось 85 нагрузки проходит вертикально по линии шарнира 114. Когда направляющая 108 достигает максимальных углов α0 и αmax, ось 85 смещается с оси 114, потому что часть распределения нагрузки между звеном 110 и направляющей 108 проходит через передний или задний угловой ограничитель 118, 116. При нормальной работе больший промежуток времени угол α не достигает своего максимального значения. Фиг.6 показывает нижнюю поверхность гусеничной системы. Запорный соединитель 111 обеспечивает отсутствие вращения гусеничной системы относительно оси 69 ступицы при повороте зубчатого колеса 112. Соединитель 111 соединен на одном конце с нижним А-рычагом 76 и звеном 110 посредством скобы 130. Запорный соединитель регулируется по длине, чтобы можно было изменять угловое положение звена 110 относительно нижнего А-рычага 76. В этом варианте воплощения применяется наконечник для соединения запорного соединителя с А-рычагом для вращения системы с замкнутой лентой при управлении транспортным средством. Также помещается втулка 140 для отделения точки присоединения соединителя 111 к А-рычагу 76. Это позволяет изменять перемещения системы с замкнутой лентой при управлении транспортным средством.
Также со ссылкой на фиг.6, устанавливается ограничитель 134 угла управления, по существу, для уменьшения угла θ управления. На механические части воздействуют большие силы и напряжения при управлении транспортным средством по причине увеличения трения, возникающего при использовании системы с замкнутой лентой (по сравнению с колесом). Система с замкнутой лентой, установленная на транспортном средстве, шире, чем колесо. Увеличенное расстояние между наиболее удаленной частью системы с замкнутой лентой и осью управления изменяет соотношение усилий между рулевыми устройствами и системой с замкнутой лентой. По меньшей мере, по этим причинам рулевой, привод 64 и полуось 74 значительно являются более нагруженными.
Теперь со ссылкой на фиг.6a, 6b, 6c и 6d ограничитель 134 угла управления в настоящем варианте воплощения уменьшает приблизительно на 7° угол θ управления на каждой стороне (например, от нейтрального до полного поворота правой руки). Ограничитель 134 угла управления расположен рядом с транспортной системой для предотвращения высоких механических нагрузок, получаемых от рулевого привода 64 и рулевой колонки 62 при примыкании к скобе 130, которая закреплена на направляющей 108. Можно четко увидеть на фиг.6d ограничитель 134 угла, контактирующий с частью направляющей 108, таким образом ограничивая управляющее движение системы с замкнутой лентой. Другой способ ограничивать угол управления состоит в том, чтобы использовать увеличенный угловой ограничитель на рулевой колонке 64. В последнем случае все усилия, приложенные к системе с замкнутой лентой, будут поддерживаться рулевым сцеплением, что является нежелательным. Кроме того, ограничитель 134 угла управления настоящего варианта воплощения присоединен к нижнему А-рычагу 76, таким образом любые нежелательные силы, возникающие от внезапного воздействия на транспортную систему, будут передаваться на А-рычаг 76, а не на управляющие компоненты 64, 66 и т.д. Поэтому можно удалить ограничитель 134 угла управления для возвращения к первоначальной геометрии управления. Это применяется, когда на транспортном средстве чередуется использование колес и систем с замкнутой лентой в зависимости от грунта.
Фиг.7 является изображением с разнесением деталей системы с замкнутой лентой, разработанной для установки вместо приводных колес. Фиг.8 является изображением с разнесением деталей системы с замкнутой лентой, разработанной для установки вместо неприводных колес (в настоящем варианте на задних осях). Основное различие между системой с замкнутой лентой, заменяющей управляемые колеса, и системой с замкнутой лентой, заменяющей неприводные колеса, состоит в том, что направляющая 108 системы с замкнутой лентой для неприводных колес не соединена шарнирно со звеном 110. Одна или обе из передней и задней частей 116, 118 звена прикреплены к направляющей 108 на системах с замкнутой лентой, которые будут установлены на неприводных колесах. Следовательно, в настоящем варианте воплощения возможно только вращательное движение для систем с замкнутой лентой, установленных вместо управляемых колес для достижения результатов, которые будут описаны ниже по тексту.
Есть три главных параметра для подвески колесного транспортного средства и геометрии управления: схождение колес, развал колес и угол продольного наклона. Системы с бесконечно лентой имеют различные геометрические параметры по сравнению с колесами. Это влияет на управляемость транспортных средств, на которые они устанавливаются. Большая область контакта с грунтом делает транспортные системы тяжелее для поворота относительно оси 230 управления (или оси продольного наклона). Углом продольного наклона является угол, на который ось центра управления отклонена вперед или назад от вертикального положения, если смотреть со стороны. Если ось поворота отклонена назад (то есть верхняя точка расположена дальше по направлению назад, чем нижняя точка), то угол продольного наклона является положительным; если ось поворота отклонена вперед, то угол продольного наклона является отрицательным. Положительный угол наклона имеет тенденцию выправлять колесо, когда транспортное средство едет вперед, и таким образом используется для увеличения устойчивости прямолинейного движения. Силы, которые заставляют колесо следовать оси управления, пропорциональны расстоянию между осью управления и осью нагрузки колеса (которое в контексте настоящего изобретения следует понимать как ось средней нагрузки, которая является нормальной проекцией на грунт точки приложения средней нагрузки от нагрузок по площади контакта с грунтом замкнутой ленты с грунтом или, другими словами, образована результирующей нагрузкой, статически эквивалентной распределению нагрузок), причем, чем больше расстояние, тем больше сила. Это расстояние называется "линейным отставанием". Когда ось управления пересекает грунт перед осью нагрузки, линейное отставание считается положительным, а когда ось управления пересекает грунт позади оси нагрузки, - отрицательным.
Большинство колесных транспортных средств использует положительное линейное отставание по вышеизложенным причинам. Вероятно, что отрицательное линейное отставание на колесном транспортном средстве вызывало бы неустойчивость, потому что управляемые колеса будут иметь тенденцию полностью поворачиваться на 180° вокруг оси управления. Тем не менее, данная сила, заставляющая колесо поворачиваться (с отрицательным линейным отставанием), полезна применительно к транспортным системам. Система с замкнутой лентой сильно отличается, главным образом, своими размерами (высотой, шириной) и большей областью контакта с грунтом. Намного большая область контакта 101 (пятно) системы с замкнутой лентой обеспечивает сопротивление вращательному движению вокруг оси управления. Это сопротивление нежелательно, поскольку оно делает систему с замкнутой лентой трудной для управления, но оно добавляет устойчивости. Отрицательное линейное основание в системе с замкнутой лентой использует это сопротивление, создаваемое трением пятна контакта с грунтом, и противодействует тенденции полного поворота комплекта гусеницы на 180° вокруг оси управления для принятия на себя усилия допустимого уровня. Таким образом, тенденция к полному обороту транспортной системы на 180° вокруг оси управления, создаваемая отрицательным линейным отставанием, гасится с помощью высокого сопротивления, создаваемого большим пятном контакта. Соответствующее отрицательное отставание обеспечивает эффект легкого управления, не вызывая неустойчивость.
Фиг.9a и 9b показывают вид слева сбоку с разнесением деталей переднего управляемого колеса и передней управляемой системы с замкнутой лентой на вседорожном транспортном средстве. На транспортном средстве с колесами на фиг.9a ось 230 управления наклонена под углом Е относительно вертикали 210 от оси 69 ступицы. Ось 230 управления проходит вдоль верхней точки 180 поворота и нижней точки (не показана) поворота стойки подвески MacPherson согласно этому варианту воплощения. Положительное линейное отставание, расстояние перед действительной вертикальной проекцией 210 приложения массы к грунту показано обозначением F. F является расстоянием между вертикальной проекцией 200 оси 230 управления, пересекающей уровень 220 грунта. Расстояние между осью 69 ступицы и грунтом 220 показано обозначением А.
На транспортном средстве с гусеничной системой с фиг.9b ось 230 управления наклонена под углом Е относительно вертикали 210 от оси 69 ступицы. Этот угол не отличается от транспортного средства с колесами, поскольку соединения подвески не изменены системой с замкнутой лентой. Ось 230 управления проходит вдоль верхней точки 180 поворота и нижней точки (не показано) поворота стойки подвески MacPherson в этом варианте воплощения. В отличие от транспортного средства с колесами с фиг.9b нагрузка 85 приложена к грунту в вертикальной проекции 240 нагрузки от шарнира 114. Вертикальная проекция 240 нагрузки рассматривается вместо вертикальной проекции 210, поскольку невращающееся звено 110 толкает вперед по шарниру 114 вертикальное приложение нагрузки транспортного средства к грунту. Отрицательное линейное отставание D является расстоянием между вертикальной проекцией 200 оси 230 управления, пересекающей грунт 220 (или область контакта 201), и проекцией 240 точки приложения нагрузки. Отрицательное линейное отставание D на уровне грунта предпочтительно составляет около 40-45 мм между осью 230 управления и осью 85 приложения нагрузки. Расстояние между осью 69 ступицы и грунтом 220 обозначено А'.
Геометрия запорного соединителя 111 в совокупности с отрицательным линейным отставанием обеспечивает более сбалансированное управление. Отрицательное линейное отставание помогает системам с замкнутой лентой вращаться вокруг оси 230 управления из их прямого положения, а геометрия замкового соединителя 111, наоборот, помогает вернуть управление в прямое положение после поворота.
На фиг.9b, кроме того, можно видеть вертикальный подъем как переднего, так и заднего угловых колес 102, 106. Подъем передних угловых колес 102 от грунта помогает удерживать систему с замкнутой лентой при движении по снегу на грунте, когда транспортное средство движется вперед. Подъем задних угловых колес 104 от грунта помогает удерживать систему с замкнутой лентой на снегу на грунте, когда транспортное средство движется назад. Если бы задние угловые колеса 104 были, по существу, на одном уровне грунта 220, система с замкнутой лентой стремилась бы завязнуть в снегу вместо того, чтобы плыть по снегу при движении назад. Большой диаметр угловых колес 102, 104 также помогает отталкиваться от большего количества снега под областью контакта системы с замкнутой лентой.
Фиг.10a и 10b являются соответственно боковыми видами фиг.9a и 9b. На этих чертежах можно видеть подвеску MacPherson со стойкой 70 подвески, соединенной своей верхней частью с соединителем 72 подвески с помощью верхнего шарнира 180 стойки и шарнирно соединенной своим нижним концом через кулачок 66 с шаровым соединением 290. Ось, образованная верхним шарниром 180 и нижним шаровым соединением 290, является осью 230 управления, вокруг которой колесо или система с замкнутой лентой вращается для управления транспортным средством. Угол В является углом между осью управления и вертикалью 280.
Расстояние D на фиг.10a является расстоянием оси 230 управления до центральной линии колеса 28 на уровне 220 грунта. Расстояние С является расстоянием от центральной линии 300 транспортного средства до центральной линии Н колеса. Применительно к системе с замкнутой лентой на фиг.10b расстояние D' является большим и на противоположной стороне (ближней стороне) центральной линии Н' области контакта системы с замкнутой лентой вследствие большего расстояния С' между центром транспортного средства 300 и центральной линией Н' области контакта. Расстояние А' между осью 69 ступицы и грунтом 220 также больше расстояния А, поскольку система с замкнутой лентой расположена выше, чем колесо. Получившийся больший зазор от грунта помогает циркуляции в глубоком снегу при ограничении трения между рамой транспортного средства и снегом.
Системы с замкнутой лентой, устанавливаемые вместо управляемых колес на вседорожных транспортных средствах, должны поворачиваться вокруг оси управления для управления транспортным средством. Обычно, на большинстве снегоходов механизмы перемещения замкнутой ленты не поворачиваются вокруг оси управления для управления транспортными средствами. Управление обеспечивают лыжи впереди транспортного средства, или, на множестве систем передвижения замкнутой ленты, расположенных сбоку, управление транспортным средством может быть осуществлено за счет разности скоростей между различными системами с замкнутой лентой.
Протектор на управляющих замкнутых лентах может быть разным для улучшения управляемости транспортного средства. Поскольку управляющая замкнутая лента должна поворачиваться вокруг оси управления, боковые стороны протекторов замкнутой ленты расположены под углом ω от поверхности, образованной поверхностью ленты. Как показано на фиг.11a, угол ω уменьшает усилие, необходимое для поворота замкнутой ленты вокруг оси управления. Выступы протектора тем меньше, чем они дальше от оси управления. Используя профиль протектора с углом ω на боковых сторонах, можно способствовать увеличению управляемости, но уменьшить трение на снегу. Использование различных профилей на управляющих системах с замкнутой лентой в отличие от неуправляемых систем (см. фиг.11b) позволяет получить более легкое управление на переднем конце и оптимальную тягу на заднем конце.
Хотя изобретение было раскрыто со ссылкой на то, что в настоящее время считается наиболее применимым и предпочтительным, следует понимать, что изобретение не ограничено описанными вариантами воплощения и элементами, а наоборот, стремится охватить различные модификации, комбинации признаков, эквивалентные устройства и эквивалентные элементы, входящие в идею и объем пунктов формулы изобретения. Кроме того, размеры различных элементов не являются ограничением, и размеры элементов на чертежах могут отличаться от размеров, представленных на чертежах. Таким образом, предполагается, что настоящее изобретение охватывает модификации и вариации изобретения при условии, что они находятся в рамках объема прилагаемой формулы изобретения и их эквивалентов.
Реферат
Предложена система с замкнутой лентой для транспортного средства, имеющего геометрию устройства управления с отрицательным линейным отставанием. Система с замкнутой лентой заменяет колеса, которые управляют транспортным средством, в частности вседорожным транспортным средством для получения улучшенной проходимости по мягкому грунту. Нижняя часть замкнутой ленты, опирающейся на направляющую, обеспечивает поворотную опору для области контакта для увеличения соответствия системы с замкнутой лентой неровному грунту. Система содержит ограничитель для ограничения угла управления системы с замкнутой лентой, который расположен на транспортном средстве таким образом, что управляющее сцепление транспортного средства не несет нагрузки, создаваемой когда ограничитель находится в зацеплении. Технический результат заключается в улучшении управляемости транспортного средства и обеспечении оптимальной тяги. 2 н. и 6 з.п. ф-лы, 23 ил.
Формула
раму приводной системы, функционально соединяемую с рамой транспортного средства, для обеспечения поворотного перемещения относительно рамы и продольной оси транспортного средства, чтобы обеспечить приводной системе возможность поворота для управления транспортным средством, при этом приводная система функционально соединяется с рулевым устройством транспортного средства;
замкнутую ленту зацепления с грунтом, установленную с возможностью перемещения на раме приводной системы и функционально соединенную с двигателем для продвижения транспортного средства, при этом, когда приводная система присоединена к транспортному средству и когда транспортное средство находится на ровной площадке, приводная система имеет ось управления, вокруг которой поворачивается приводная система для управления транспортным средством, ось нагрузки, образованную результирующей нагрузкой, статически эквивалентной распределению нагрузок по области контактирования замкнутой ленты с грунтом, и точка пересечения оси нагрузки и грунта находится продольно впереди точки пересечения проекции оси управления на грунт и грунта, в результате чего приводная система имеет отрицательное линейное отставание.
раму, имеющую переднюю часть, заднюю часть и продольную ось,
двигатель, опирающийся на раму,
седло, опирающееся на раму, для размещения водителя,
руль, прикрепленный к раме, для приема усилия, прилагаемого к рулю водителем, и
первую и вторую приводные системы по любому из предшествующих пунктов на передней левой и передней правой сторонах транспортного средства соответственно.
Комментарии