Система управления колесами полуприцепа - RU2440265C2
Код документа: RU2440265C2
Чертежи








Описание
Изобретение относится к транспортному машиностроению и предназначено, в частности, для использования с тяжелыми транспортными полуприцепами, имеющими группы односкатных колес.
Известно устройство для управления колесами полуприцепа транспортного средства по авт. св. №1049323 [1], содержащее дышло и параллелограммную рамку с двумя параллельными дышлу тягами, соединенными шарнирами с вертикальной осью с одной стороны с тяговой балкой, а с другой - с двуплечим рычагом, укрепленным на дышле с возможностью поворота и соединенным эксцентрично шарниром с тягой, которая шарнирно соединена с осью управляемых колес полуприцепа. С целью повышения устойчивости управляемости движением полуприцепа тяги параллелограммной рамки снабжены дополнительно горизонтальными шарнирами, расположенными на одной оси с шарниром дышла, а двуплечий рычаг укреплен на дышле между горизонтальным шарниром и местом крепления дышла к раме полуприцепа, при этом оси тяговой балки, горизонтальных шарниров и плеч рычага расположены в одной плоскости, а дышло жестко соединено с рамой полуприцепа.
Однако известное устройство не предназначено для управления колесами большегрузного полуприцепа.
Известно устройство для управления колесами полуприцепа по авт. св. 856883, 1979.11.16 [2]. Для достижения цели изобретения - улучшение эксплуатационных качеств полуприцепа путем улучшения маневренности при движении передним и задним ходом и уменьшение динамических нагрузок в тросовом приводе, устройство снабжено подпружиненными ограничителями, установленными в отверстиях поворотного рычага, выполненных в виде пазов, а система управления выполнена в виде двух гидрораспределителей, первый из которых - с механическим управлением гидравлически соединен с гидронасосом и с торцовыми полостями второго гидрораспределителя, выполненного с гидравлическим управлением, причем последний гидравлически соединен с гидронасосом, гидробаком и упомянутым гидроцилиндром, полости которого через дроссели соединены с торцовыми полостями второго гидрораспределителя, при этом золотник и корпус последнего соединены соответственно с полуприцепом и рамой тягача.
Однако все известные из уровня техники (примерно до 2000 года) устройства управления колесами полуприцепов не предназначены для управления колесами большегрузного полуприцепа, не приспособлены для выдерживания максимально полезных нагрузок.
В настоящее время имеется устойчивый и все более растущий спрос на большегрузные перевозки. При этом приблизительно 20% тяжелых транспортных прицепов являются сверхмощными прицепами для транспортировки грузов повышенного веса. Этим прицепам нужна система двухскатных колес, в которой передняя и задняя оси прицепа оснащены соседними парами двухскатных колес для выдерживания избыточных нагрузок. Большинство же (80%) тяжелых прицепов выполнены с возможностью выдерживать максимальные полезные нагрузки с помощью группы односкатных колес. На большинстве прицепов колеса установлены на поперечных осях, сгруппированных спереди и сзади прицепа для обеспечения управления поворотом прицепа и уменьшенного истирания шин. Однако прицепы этого типа имеют ограниченную маневренность. Расположение шин посредине прицепа неприемлемо, поскольку шины будут испытывать сопротивление качению по дороге при каждом повороте прицепа, что будет приводить к большому износу шин, а также износу дороги. Кроме того, шины, расположенные посредине прицепа, будут неспособны успешно проходить бугры и другие неровности на дороге, не разрушая всю подвеску прицепа. Если прицеп опирается только на колеса спереди и сзади, то шасси прицепа, простирающееся между ведущей осью спереди прицепа и задней осью, должно быть достаточно прочным, чтобы выдержать полезные нагрузки посредине прицепа, где нет опоры на колеса.
Из патента РФ №2324616 [3] известно управляющее поворотом средство, включающее в себя два управляющих поворотом узла, закрепленные с возможностью поворота на каждой из передней и задней частей колесной рамы и выполненных с возможностью приведения в действие для независимого смещения передней и задней частей поперек кузова транспортного средства.
Управляющие поворотом узлы представляют собой линейные опорные исполнительные механизмы, имеющие поршень возвратно-поступательного хода, причем такие поршни установлены на раму посредством шарнирного соединения. Опора для шарнира подвески колес, предназначенная для расположения между двумя поворотными элементами, содержит цилиндрическую втулочную опору, ограничивающую центральную ось и имеющую открытые концы с криволинейными поясками. Известное устройство предназначено для повышения маневренности и обеспечения большей полезной нагрузки и меньшего износа шин большегрузных прицепов. Однако для использования в большегрузных полуприцепах известное управляющее поворотом средство обладает избыточностью и сложностью.
По совокупности признаков управляющее поворотом средство по патенту №2324616 [3] выбрано в качестве наиболее близкого аналога.
Техническим результатом заявляемого изобретения является создание системы управления поворотом колес полуприцепа, обеспечивающего прохождение поворотов тягача и полуприцепа по одной траектории. При этом возможно увеличение базовой длины полуприцепов, увеличение количества звеньев автопоезда без риска съезда последних с полосы движения. Существенным отличием заявляемой системы управления от известных технических решений является то, что она не связана с тягачом, а автономно установлена на раме полуприцепа, что упраздняет дополнительное агрегатирование с тягачом.
Сущность изобретения иллюстрируется чертежами.
Фиг.1 - схема заявляемой системы при не работающем (маршевом) положении поворотного устройства.
Фиг.2 - схема заявляемой системы при рабочем положении поворотного устройства.
Фиг.3 - схема заявляемой системы при движении прямо.
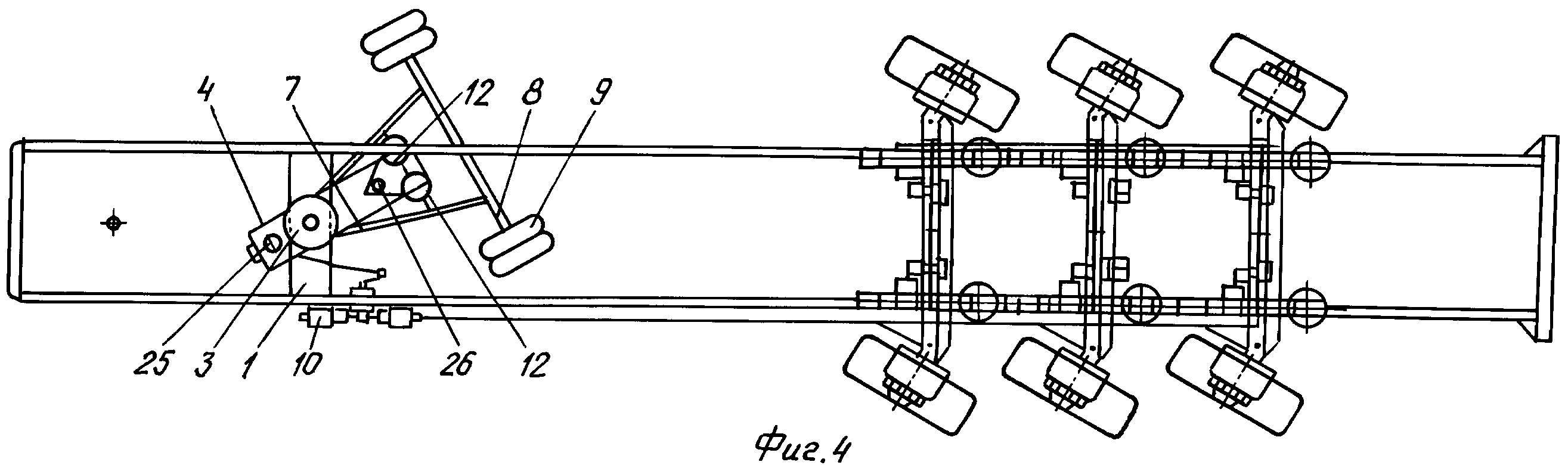
Фиг.4 - схема заявляемой системы при повороте налево.
Фиг.5 - схема заявляемой системы при повороте направо.
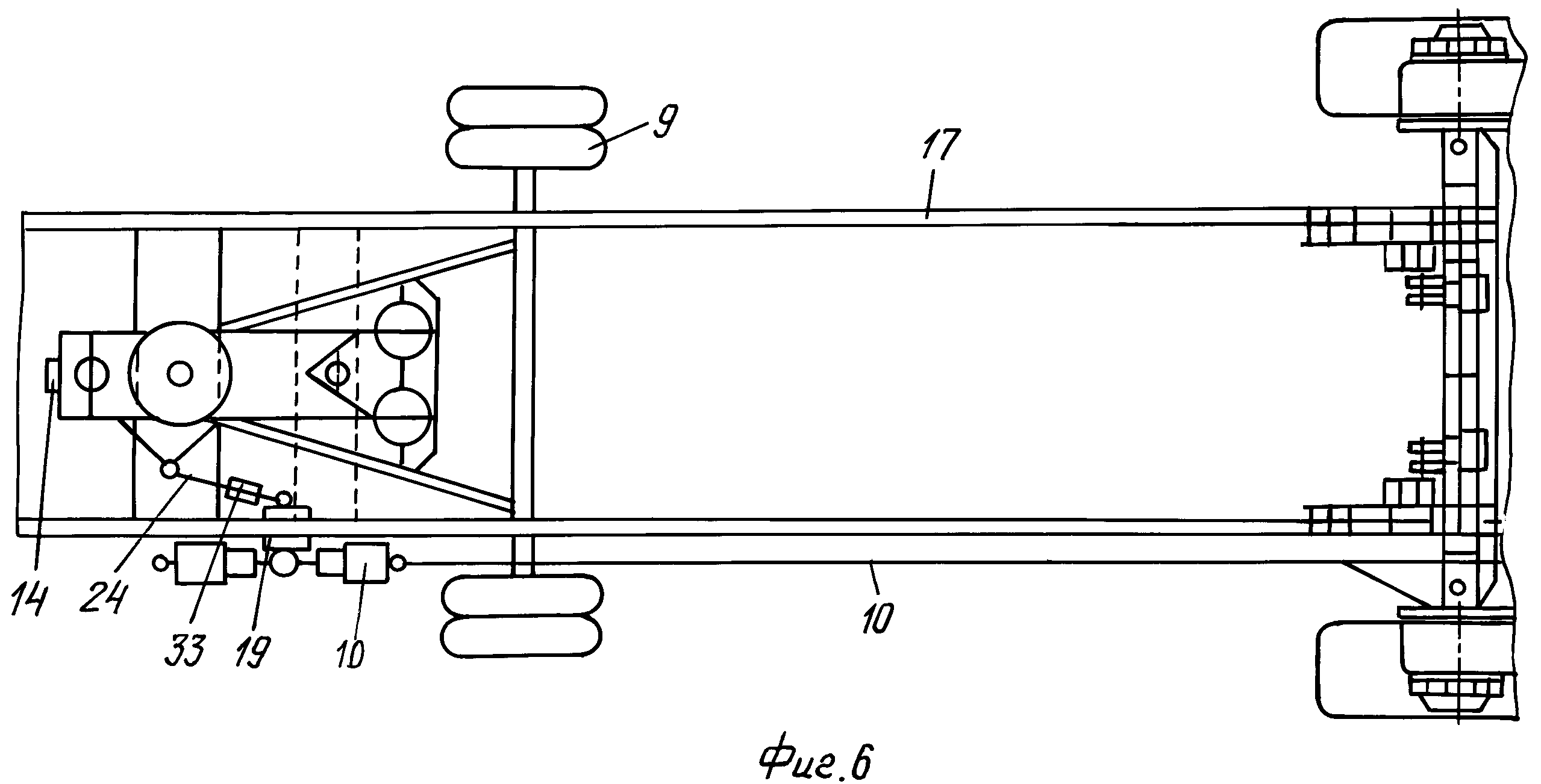
Фиг.6 - схема механизмов заявляемой системы.
Фиг.7 - схема опорно-подъемного механизма.
Фиг.8 - схема фиксирующего механизма.
Фиг.9 - конструкции рам: 9а - V-образная рама 7; 9б - рама 4 поворотного механизма; 9в - подрамник 6.
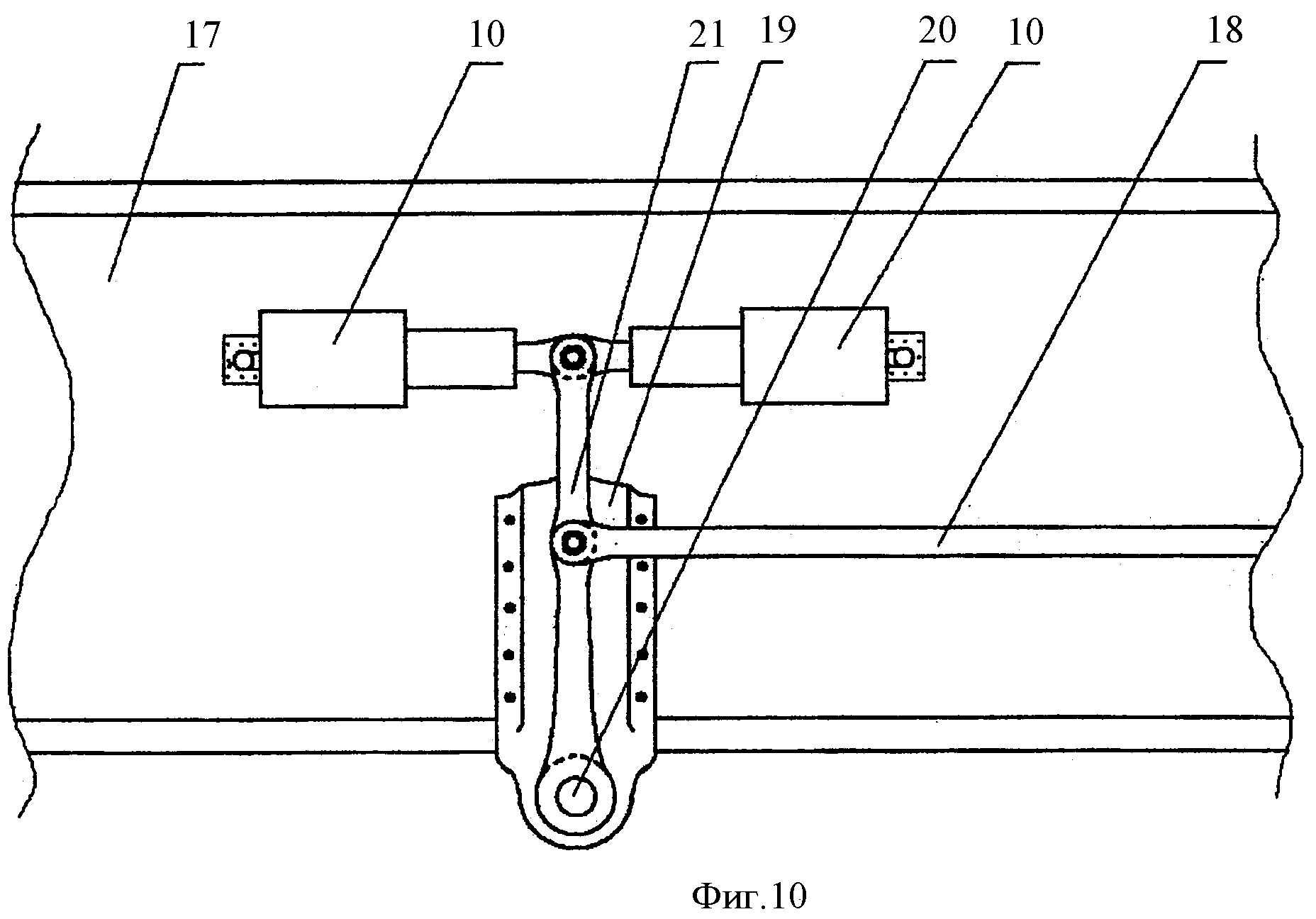
Фиг.10 - схема механизма внешней сошки.
Фиг.11 - схема механизма внутренней сошки.
Фиг.12 - схема взаимного расположения сошек механизма передачи направления поворота (МПНП) колесам полуприцепа.
Расшифровка позиций поворотного устройства:
1 - дополнительная траверса
2 - ось
3 - тормозной барабан
4 - рама поворотного механизма
5 - реактивная тяга
6 - подрамник
7 - подъемная

8 - подъемная ось
9 - поворотные колеса
10 - пневмоусилители сошки
11 - рычаг для ручного управления
12 - пневмоцилиндры
13 - подъемная вилка
14 - кран
15 - ролик
16 - амортизатор
17 - лонжерон
18 - тяга
19 - кронштейн
20 - палец
21 - сошка внешняя
22 - сошка внутренняя
23 - колеса полуприцепа
24 - тяга
25 - пневмоцилиндр
26 - пневмоцилиндр подъемной вилки
27 - пневмоцилиндр
28 - пневмоцилиндр
29 - кран
30 - ∧-образная траверса
31 - пневмокран ∧-образной траверсы 30
32 - паз ∧-образной траверсы
33 - пневмокран.
Заявляемая система управления колесами полуприцепа выполнена с возможностью установки на кузове транспортного средства (полуприцепа), содержащего колесную раму с лонжеронами и траверсами.
В состав системы входит поворотный механизм, включающий опорно-подъемный механизм, механизм возвращения системы в нейтральное положение и механизм передачи направления поворота (МПНП) колесам полуприцепа.
Колесная рама с лонжеронами и траверсами служит опорой поворотному механизму (фиг.3). Для этого она содержит дополнительную траверсу 1 (фиг.3), закрепленную на ней ось 2 (фиг.7) с центральной ступицей (не обозначена), оснащенную тормозным механизмом в виде тормозного барабана 3 (фиг.7). На центральной ступице жестко закреплена поворотная рама 4 (фиг.9б), с которой связаны опорно-подъемный механизм и механизм возвращения системы в нейтральное положение.
Опорно-подъемный механизм (фиг.7) содержит подъемную раму 7, которая может быть выполнена

Механизм возвращения системы в нейтральное положение (фиг.7, 8) включает в себя подъемную вилку 13, шарнирно закрепленную на поворотной раме 4 и оснащенную пневмоцилиндром 26. На вершине вилки 13 закреплен ролик 15. При этом над вилкой 13 между лонжеронами 17 закреплена ∧-образная траверса 30 с пазом 32, снабженная пневмокраном 31.
Механизм передачи направления поворота (МПНП) колесам полуприцепа выполнен в виде внешней 21 и внутренней 22 сошек (фиг.6, 10, 11, 12), жестко закрепленных через кронштейн 19 на лонжероне 17 (фиг.12). Соединение может быть осуществлено через палец 20, проходящий через кронштейн 19 и жестко соединяющий внешнюю 21 и внутреннюю 22 сошки. Внутренняя сошка 22 соединена тягой 24 с поворотной рамой 4. Тяга 24 оснащена пневмокраном 33. Наружная сошка 21 в средней своей части соединена тягой 18 с колесами 23 полуприцепа. На вершине сошки 21 шарнирно закреплены два пневмоусилителя 10, которые крепятся шарнирно к лонжерону 17.
Описание работы механизмов системы управления колесами полуприцепа.
Поворотный механизм имеет два положения управления: нейтральный (фиг.1) и рабочий (фиг.2). Когда механизм находится в нейтральном положении, автопоезд движется с заблокированной системой управления колесами. Когда механизм приведен в рабочее положение, автопоезд имеет возможность маневрирования за счет управления колесами полуприцепа.
Работает система управления колесами полуприцепа следующим образом.
Водитель с пульта управления посылает сигнал пневмокрану 14 (фиг.6) на подачу воздуха пневмоцилиндрам 12, параллельно отключается давление воздуха в пневмоцилиндрах 25 и 26. В результате срабатывания пневмоцилиндров 12
Вращательное движение поворотного механизма через тягу 24 преобразуется в продольное движение сошки 22, которая зеркально передает движение сошке 21 через палец 20, расположенный в кронштейне 19. Сошка 21 передает движение тяге 18, которая управляет поворотом колес 23.
Передача движения тяге 18 обеспечивается усилением пневмоцилиндров 10, расположенных на внешней сошке 21 при командах пневмокрана 33, расположенного на тяге 24.
В случае максимального (аварийного) поворота поворотного механизма в ту или иную сторону пневмокран 14 аварийно сбрасывает давление воздуха из пневмоцилиндров 12 для облегчения бокового скольжения колес 9 на оси 8. При начале возвращения поворотного механизма в исходное положение пневмокран 14 возобновляет подачу воздуха в пневмоцилиндры 12.
Механизм возвращения поворотной системы в нейтральное положение и ее блокировка работает следующим образом. При получении сигнала с пульта управления механизмом поворотных колес на возвращение в нейтральное положение пневмокран 14 отключает пневмоцилиндры 12 и включает пневмоцилиндр 25 на поднятие
При движении задним ходом можно принудительно, вручную, поворачивать колеса 23 полуприцепа при помощи рычагов 11. Для этого приподнимают V-образную раму 7, оторвав колеса 9, соединенные осью 8, от дорожного полотна.
В случае необходимости (при отсутствии давления воздуха в пневмосистеме) поднять
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авторское свидетельство №1049323. Устройство для управления колесами полуприцепа транспортного средства. Опубликовано: 23.10.1983.
2. Авторское свидетельство №856883. Устройство для управления колесами полуприцепа Опубликовано: 1979.11.16.
3. Патент РФ №2324616. Управляемый блок односкатного колеса для прицепов. Опубликовано 2008.05.20 - наиболее близкий аналог.
Реферат
Изобретение относится к транспортному машиностроению. Система управления колесами полуприцепа выполнена с возможностью установки на кузове транспортного средства. Система содержит колесную раму с лонжеронами и траверсами, служащую опорой поворотному механизму, который содержит систему тяг и рычагов, соединенных с возможностью поворота. Поворотный механизм прикреплен с возможностью поворота к колесной раме. Система дополнительно содержит опорно-подъемный механизм, механизм возвращения системы в нейтральное положение и механизм передачи направления поворота колесам полуприцепа. Колесная рама снабжена дополнительной траверсой для крепления поворотного механизма, на которой закреплена ось с центральной ступицей, оснащенной тормозным механизмом. На центральной ступице жестко закреплена рама поворотного механизма, с которой связаны опорно-подъемный механизм и механизм возвращения системы в нейтральное положение. Механизм передачи направления поворота колесам полуприцепа установлен на лонжероне колесной рамы и связан тягой с колесами полуприцепа. Достигается улучшение управляемости полуприцепа. 5 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Управляемый блок односкатного колеса для прицепов
Комментарии