Система принудительного управления - RU2515620C2
Код документа: RU2515620C2
Чертежи

Описание
Изобретение относится к системе принудительного управления, согласно ограничительной части пункта 1 формулы изобретения.
При этом транспортное средство, используемое в качестве тягача, является моторным транспортным средством, а прицеп - безмоторным транспортным средством, выполненным в виде комбинации транспортных средств сочлененного транспорта.
Для обеспечения устойчивости движения безмоторных транспортных средств, в частности прицепов, с помощью тягача, в частности трактора, и улучшения маневренности состоящей из прицепа и тягача комбинации транспортных средств применяют системы принудительного управления.
Системы принудительного управления находят применение в транспортных средствах с несколькими задними мостами и служат для принудительного управления по меньшей мере одним управляемым задним мостом. Эти системы принудительного управления имеют задачу отклонения одного из задних мостов прицепа в зависимости от положения тягача относительно прицепа. За счет этого обеспечивается то преимущество, что при прохождении поворотов тягачом и прицепом лежащие друг за другом колеса нескольких задних мостов, в частности всех мостов прицепа, по меньшей мере по существу катятся в одной колее.
При этом недостатком является то, что при использовании прицепа с отличающимся тягачом, например, когда стандартный тягач находится на техническом обслуживании, в ремонте, изменен и/или заменен, система принудительного управления больше не работает правильно и лежащие друг за другом колеса нескольких задних мостов, в частности всех мостов прицепа, при движении в поворотах катятся без сохранения колеи.
Поэтому задачей изобретения является создание системы принудительного управления указанного в начале вида, с помощью которой можно предотвращать указанные недостатки, и которая при многих различных тягачах обеспечивает возможность качения лежащих друг за другом колес нескольких задних мостов прицепа при движении в поворотах с боковой устойчивостью (удержанием колеи).
Это достигается, согласно изобретению, с помощью признаков пункта 1 формулы изобретения.
При этом обеспечивается то преимущество, что различные сцепные части можно применять для многих различных тягачей. Из этих многих сцепных частей для каждого из многих тягачей может быть предварительно присвоена одна сцепная часть.
При этом предпочтительно, что для каждого прицепа и для каждого тягача предусмотрена возможность предопределенного присвоения подходящих сцепных частей. При этом предпочтительно, что после выбора подходящей сцепной части процесс сцепления можно выполнять обычным образом и тем самым без дополнительных затрат или лишь с небольшими дополнительными затратами, для того чтобы лежащие друг за другом колеса нескольких задних мостов прицепа при движении в поворотах катились в одной колее. Кроме того, изобретение не усложняет область сцепки за счет применения многочисленных переходных элементов между тягачом и прицепом и не увеличивает за счет расположенных по высоте друг за другом элементов вертикальные габариты указанной области, что могло бы привести к уменьшению дорожного просвета.
Изобретение относится также к способу соединения системы принудительного управления согласно ограничительной части пункта 8 формулы изобретения.
В соответствии с этим задачей изобретения является создание такого способа, с помощью которого могут быть предотвращены указанные выше недостатки и который при многих различных тягачах обеспечивает возможность качения лежащих друг за другом колес нескольких задних мостов прицепа при движении в поворотах с удержанием колеи по меньшей мере по существу по одной колее.
Эта задача решена согласно изобретению с помощью признаков пункта 8 формулы изобретения. За счет этого обеспечиваются указанные выше преимущества и предпочтительные эффекты.
Зависимые пункты формулы изобретения, которые так же как и пункты 1 и 8 образуют одновременно часть описания, относятся к другим предпочтительным вариантам выполнения изобретения.
В предпочтительной модификации могут быть предусмотрены признаки пункта 2 формулы изобретения. За счет этого может быть предотвращен поворот тягача за предварительно заданный угол между тягачом и дышлом. При этом предпочтительно, что за счет этого может быть задан максимальный угол между тягачом и дышлом, при этом может быть задано максимальное отклонение системы принудительного управления и тем самым может обеспечиваться, что система принудительного управления не отклоняется за максимально допустимый предельный угол.
Ниже приводится более подробное описание изобретения на основе приведенных лишь в качестве примера предпочтительных вариантов выполнения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг.1 - тягач и прицеп, а также система принудительного управления, согласно первому предпочтительному варианту выполнения, в первом относительном положении, которое по существу соответствует движению по прямой линии, на виде сверху;
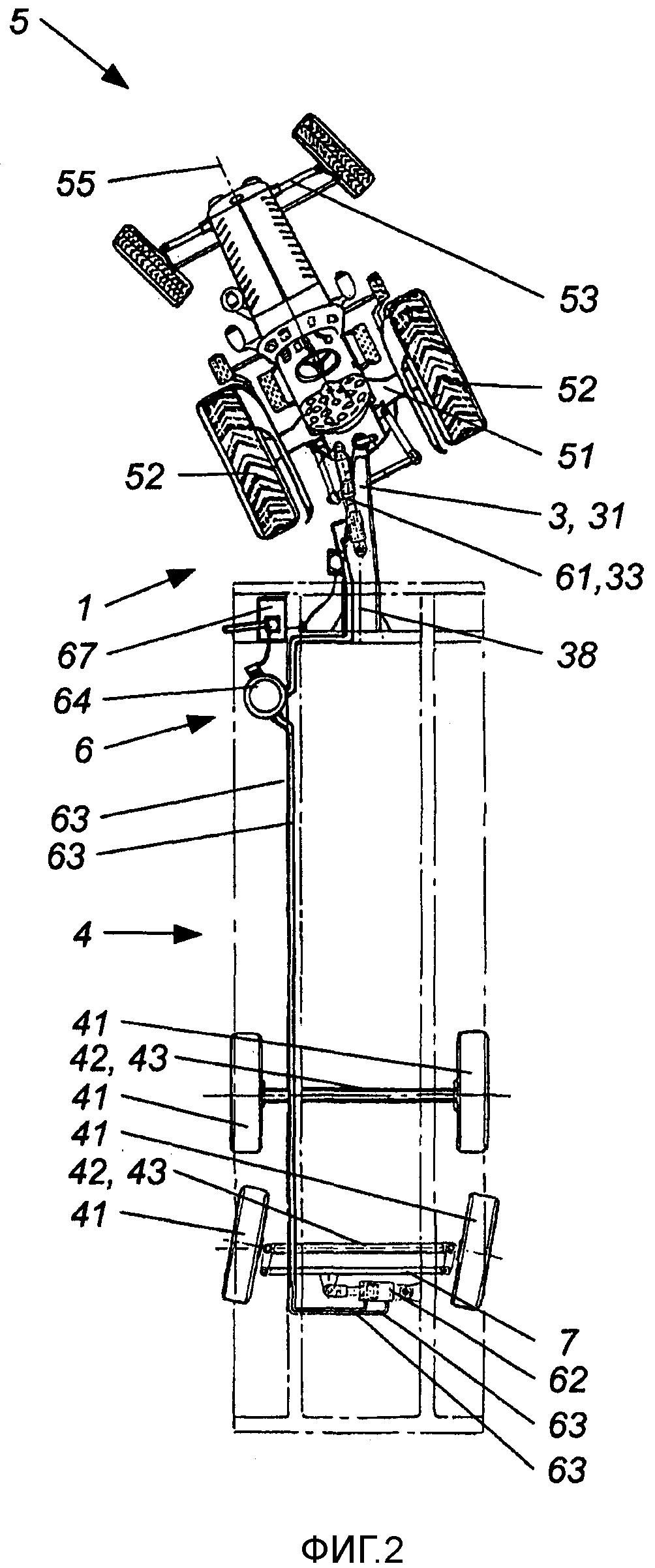
фиг.2 - тягач и прицеп, согласно фиг.1, во втором относительном положении, которое соответствует движению в повороте, на виде сверху;
фиг.3 - сцепная часть и первый гидравлический цилиндр, согласно первому предпочтительному варианту выполнения, в изометрической проекции;
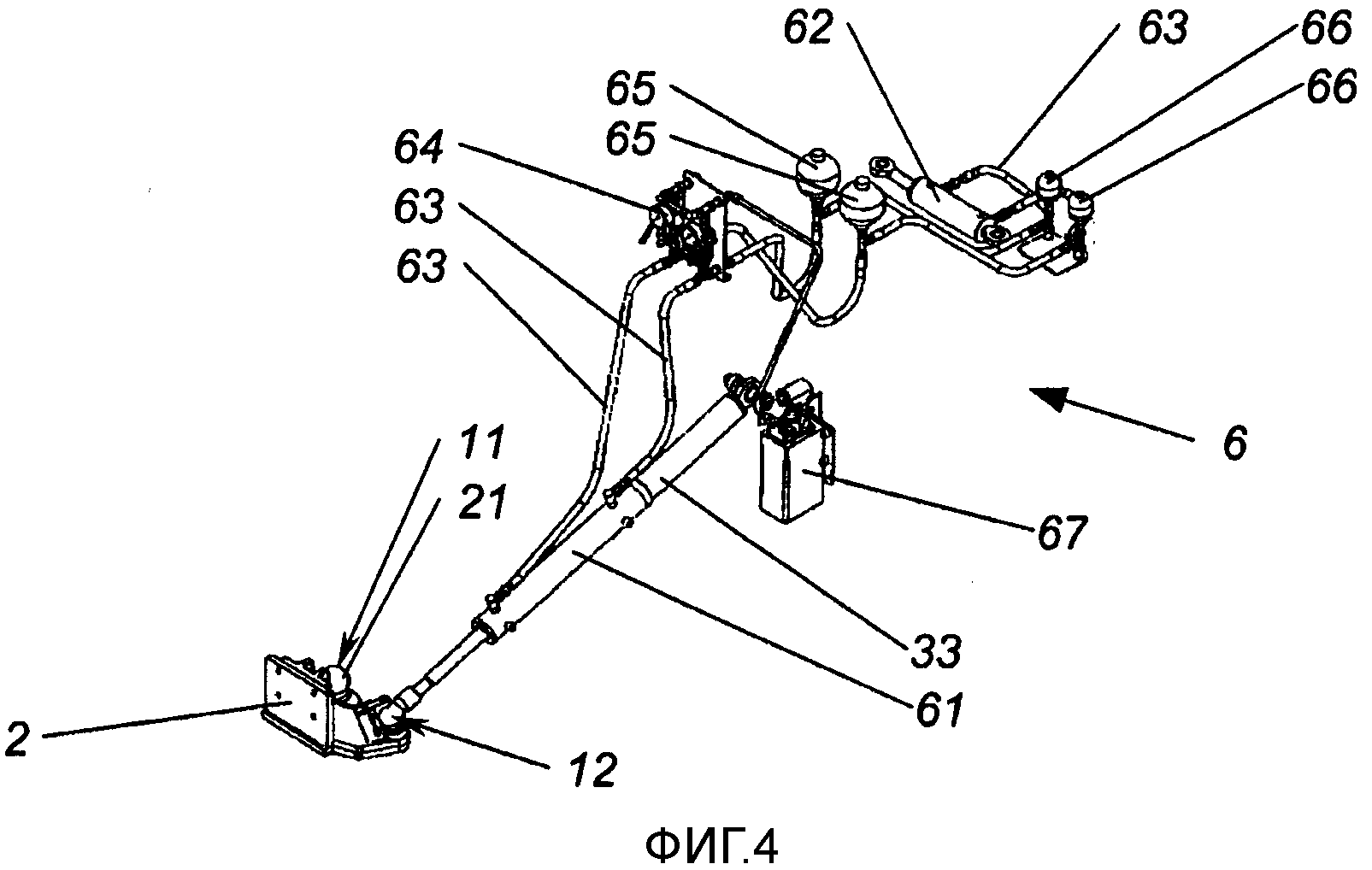
фиг.4 - сцепная часть и гидравлический контур системы принудительного управления, согласно второму предпочтительному варианту выполнения, содержащий первый гидравлический цилиндр, второй гидравлический цилиндр, управляющий блок, ручной насос, два первых выравнивающих давление устройства, а также два вторых выравнивающих давление устройства, в изометрической проекции;
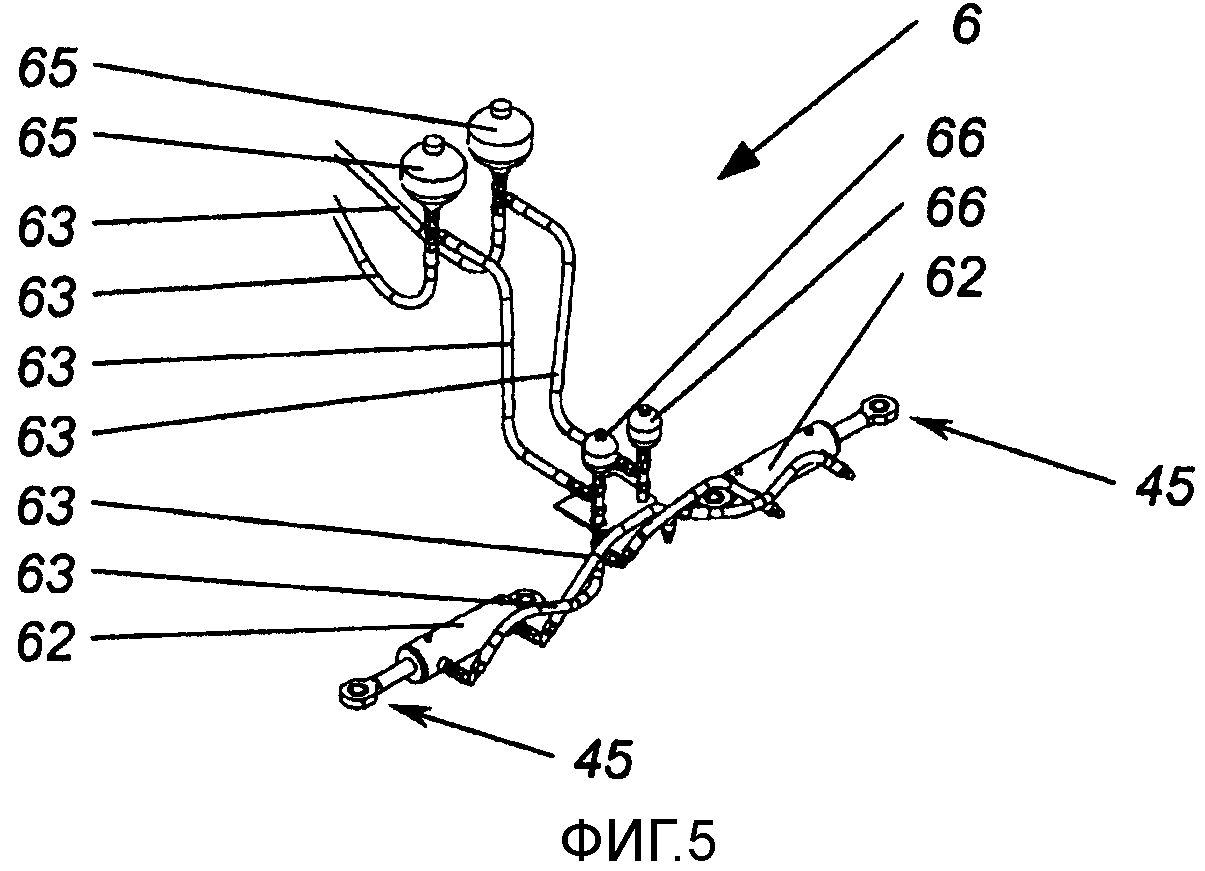
фиг.5 - часть гидравлического контура в зоне второго гидравлического цилиндра системы принудительного управления, согласно третьему предпочтительному варианту выполнения, при этом вместо поперечной рулевой тяги предусмотрены два вторых гидравлических цилиндра; и
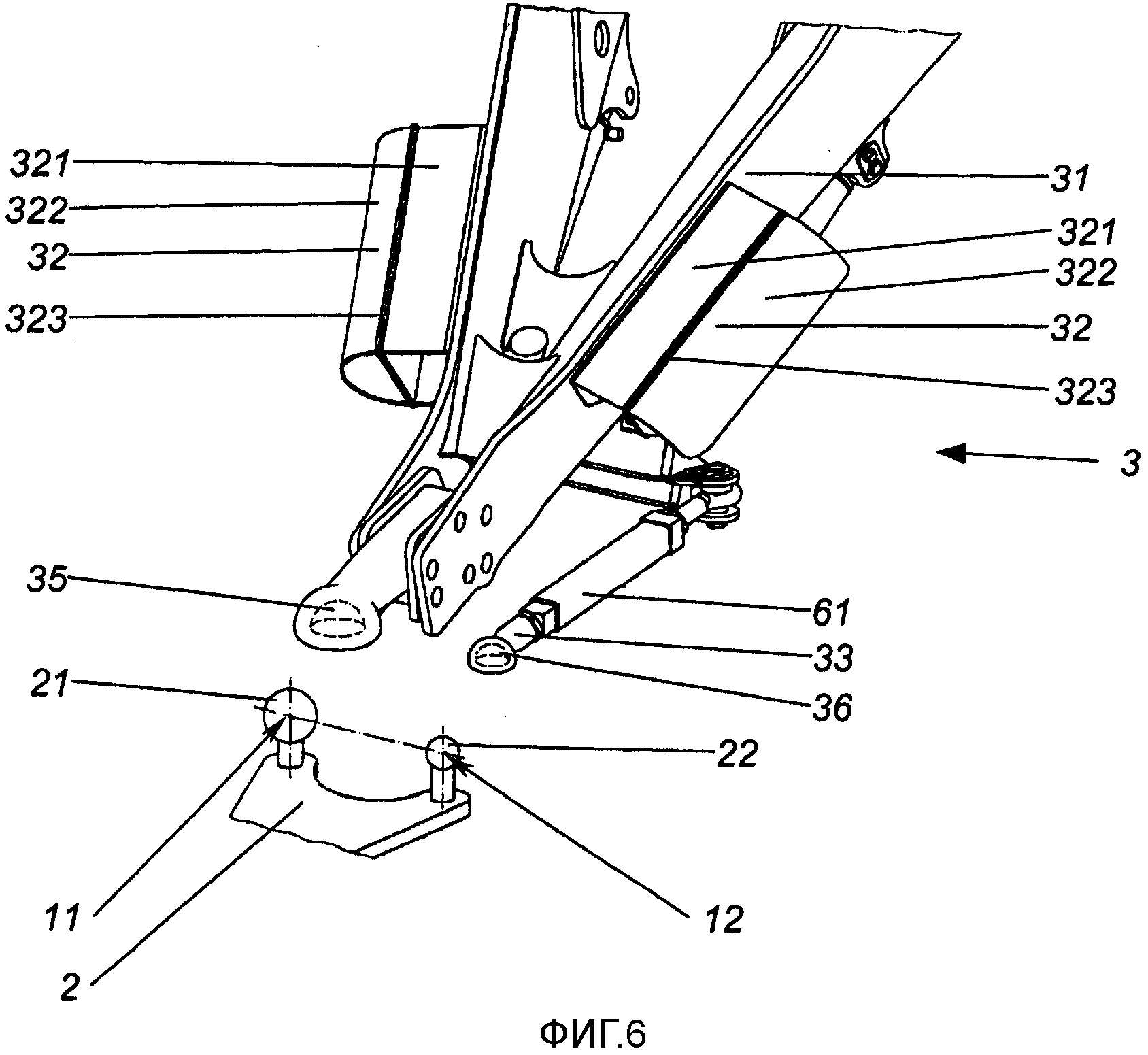
фиг.6 - сцепная петлевая часть, согласно предпочтительному варианту выполнения, содержащая сцепную петлю, дышло и продольную рулевую тягу, при этом продольная рулевая тяга содержит один первый гидравлический цилиндр, а также две распорки, которые образуют комплект распорок предпочтительного варианта выполнения, при этом распорки расположены на сцепной петлевой части, в частности, на дышле, и сцепной петлевой части, содержащей первый сцепной шар и второй сцепной шар, в изометрической проекции.
На фиг.1-6 показаны по меньшей мере части системы 1 принудительного управления для применения по меньшей мере с одним прицепом 4 и несколькими различными тягачами 5, содержащей по меньшей мере одну сцепную часть 2 для расположения на тягаче 5 и сцепную петлевую часть 3 для расположения на прицепе 4, при этом сцепная часть 2 и сцепная петлевая часть 3 предназначены для сцепления друг с другом в точке 11 сцепления и в расположенной на расстоянии от точки 11 сцепления точке 12 шарнирного соединения, для которой предлагается, что на каждом из упомянутого множества различных тягачей 5 с помощью по меньшей мере одной из упомянутой по меньшей мере сцепной части 2 предоставлены точка 11 сцепления и точка 12 шарнирного соединения, соответственно, на заданном расстоянии от заднего моста 51 тягача 5.
На фиг.1 и 2 схематично показаны тягач 5 и выполненное в виде прицепа 4 безмоторное транспортное средство, при этом тягач 5 и прицеп 4 образуют выполненный в виде комбинации транспортных средств автопоезд.
Систему 1 принудительного управления можно применять, в частности, в способе соединения системы 1 принудительного управления для принудительного управления по меньшей мере одним колесом 41 прицепа 4, который может попеременно буксироваться различными тягачами 5. При этом способ содержит этапы:
- расположения одной из предварительно задаваемых сцепных частей 2 на тягаче 5 с целью расположения точки 11 сцепления и точки 12 шарнирного соединения на задаваемом расстоянии до заднего моста 51 тягача 5 в зависимости от упомянутого соответствующего из различных тягачей 5, и
- сцепления друг с другом сцепной петлевой части 3, которая расположена на прицепе 4, с соответствующей сцепной частью 2 в точке 11 сцепления и в расположенной на расстоянии от точки 11 сцепления точке 12 шарнирного соединения.
Система 1 принудительного управления и способ соединения, в частности, системы 1 принудительного управления, обеспечивают указанные выше преимущества и предпочтительные эффекты. В частности, система 1 принудительного управления и способ принудительного управления обеспечивают качение по меньшей мере по существу в одной колее расположенных друг за другом колес 41 нескольких задних мостов 42 даже при различных тягачах 5.
Системы 1 принудительного управления применяются при буксировке транспортных средств с несколькими задними мостами 42 и служат для принудительного управления по меньшей мере одним управляемым задним мостом 44, который в противоположность не управляемым задним мостам выполнен с возможностью управления. Возможность управления в этой связи означает, что положение смонтированных на управляемом заднем мосте 44 колес 41 может принимать заданные различные углы отклонения, при этом управление колесами 41 может называться также отклонением колес 41.
Преимуществом системы 1 принудительного управления является то, что когда система 1 принудительного управления прицепа 4 согласована с тягачом 5, то лежащие друг за другом колеса 41 нескольких задних мостов 42, предпочтительно всех мостов прицепа 4, не только при движении по прямой, как схематично показано на фиг.1, но также при движении в повороте, как схематично показано на фиг.2, катятся в одной колее. Это является предпочтительным, в частности, при движении по полю, пашне, полевой дороге и/или лесной дороге, поскольку лежащие друг за другом колеса 41 прицепа 4 также при движении в повороте создают по существу лишь одну колею. Поскольку при этом урожай поля и/или пашни не сминается, то урожай не страдает. При этом также уплотняется меньшая поверхность почвы поля и/или пашни, за счет чего принудительное управление предпочтительно также для сохранения почвы. Наконец, можно надежно двигаться на узких и трудно проходимых полевых дорогах и/или лесных дорогах, поскольку прицеп следует с большой точностью в колее тягача 5 за счет системы 1 принудительного управления.
Однако проблематичным для системы 1 принудительного управления является смена тягача 5. Поскольку различные тягачи 5, на основании различных расстояний между передним мостом 53 и задним мостом 51 тягача 5 и на основании различной ширины колеи, т.е. расстояния между колесами на оси, имеют различные характеристики отклонения, то необходимо, для оптимального и правильного следования прицепа 4, согласовывать систему 1 принудительного управления с соответствующим используемым в качестве тягача транспортным средством 5. При этом согласование содержит как угловую зависимость, так и прямое положение (для движения по прямой) системы 1 принудительного управления, для чего необходимо согласовывать каждую возможную комбинацию транспортных средств, т.е. заданный прицеп 4 и заданный тягач 5 по отдельности в зависимости от угла и в прямом положении системы 1 принудительного управления.
Прямое положение системы 1 принудительного управления обычно устанавливают посредством установки комбинации транспортных средств, т.е. прицепа 4 и соответствующего тягача 5 на плоской поверхности и соединения как сцепной петли 35, так и управляющей петли 36 на тягаче 5. Для этого открывают управляющие клапаны управляющего блока 64 и устанавливают систему 1 принудительного управления на режим следования. Режим следования системы 1 принудительного управления означает, что обычно обеспечиваемое с помощью гидравлической системы 6 соединение переключается в режим отсутствия передачи сил, и тем самым управляемый задний мост 44 прицепа 4 вместо принудительного управления включается в режим самоуправления, в частности, следования. При движении по прямой управляемый задний мост 44 прицепа также движется прямо. После переключения системы 1 принудительного управления на принудительное управление, т.е. после переключения соединения в режим передачи сил, согласовывают друг с другом положения первого гидравлического цилиндра 61 и второго гидравлического цилиндра 62 для комбинации транспортных средств.
Первый гидравлический цилиндр 61 и/или второй гидравлический цилиндр 62 могут быть предпочтительно цилиндрами двойного действия.
Первый гидравлический цилиндр 61 может быть предпочтительно выполнен в качестве задающего цилиндра, при этом изменение положения первого гидравлического цилиндра 61 преобразуется в движение гидравлической жидкости. Второй гидравлический цилиндр 62 может быть предпочтительно выполнен в качестве ведомого цилиндра, при этом управляемое задающим цилиндром движение гидравлической жидкости вызывает изменение положения ведомого цилиндра.
Для заполнения и установки рабочего давления гидравлической жидкости в системе 1 принудительного управления, которое предпочтительно составляет между 50 бар и 100 бар, т.е. предпочтительно между 5 МПа и 10 МПа, гидравлическая система 6 может предпочтительно содержать ручной насос 67.
В режиме следования, т.е., в частности, в режиме движения вперед, системы 1 принудительного управления обычно не обеспечивается оптимальное следование, т.е., в частности, точное следование в колее прицепа 4 за тягачом 5, поэтому при нормальной работе комбинации транспортных средств предпочтительным является так называемый режим принудительного управления системы 1 принудительного управления.
Предпочтительно, гидравлическая система 6 может содержать шаровой кран для переключения между режимом следования и режимом принудительного управления системы 1 принудительного управления. За счет этого можно особенно просто переключать рабочее состояние системы 1 принудительного управления из режима принудительного управления в режим следования, и наоборот. При этом предпочтительно, что в каждом положении, соответственно, в каждой ситуации движения комбинации транспортных средств, можно переключать рабочее состояние системы 1 принудительного управления из режима принудительного управления в режим следования, при этом может быть разгружена система управления тягача 5. При этом также предпочтительно, что когда тягач не имеет точки 12 шарнирного соединения, можно просто переключать рабочее состояние системы 1 принудительного управления из режима принудительного управления в режим следования. За счет этого при отказе тягача 5 можно буксировать прицеп 4 с помощью другого выполненного в качестве буксировочного транспортного средства тягача 5, при этом предпочтительно можно использовать также буксировочные транспортные средства со сцепками без точки шарнирного соединения.
Согласование зависимости от угла, т.е. углового соотношения между тягачом 5 и сцепной петлей 3 относительно угла управления управляемыми колесами 41 прицепа 4, системы 1 принудительного управления связано с большими трудностями и часто невозможно при обычных сцепках прицепа, поскольку на основании не изменяемого углового соотношения часто невозможно изменение характеристик следования прицепа при обычных системах 1 принудительного управления.
За счет этого управляемые колеса 41 на управляемом заднем мосте 44 при не согласованной комбинации транспортных средств отклоняются не с оптимальным углом. Это приводит часто к тому, что прицеп при движении в повороте следует не оптимально в колее. Это может ограничивать маневренность комбинации транспортных средств (автопоезда), и может приводить дополнительно на поле и/или на пашне к дополнительному сминанию урожая и/или дополнительному уплотнению почвы. При этом система 1 принудительного управления может отклоняться также за максимальный угол, так что система 1 принудительного управления может быть повреждена. Все это может приводить в совокупности к тому, что некоторые комбинации транспортных средств не могут двигаться в режиме принудительного управления системы 1 принудительного управления.
Для предотвращения этих недостатков в одном предпочтительном варианте выполнения системы 1 принудительного управления предусмотрено, что на каждом из множества различных тягачей 5 с помощью по меньшей мере одной сцепной части 2 предоставляется точка 11 сцепления и точка 12 шарнирного соединения на задаваемом расстоянии от заднего моста 51 тягача 5. За счет этого обеспечивается заданное согласование оптимальной угловой зависимости между тягачом 5 и сцепной петлевой частью 3 относительно угла отклонения управляемых колес 41 прицепа 4 для многих различных комбинаций транспортных средств. При этом предпочтительно, что согласование передаточного отношения, которое следует из всех геометрических и определяемых связей, можно вычислять и/или определять с помощью вычислительного устройства.
За счет этого можно для каждого прицепа 4 предварительно определять для различных, в частности, предлагаемых в продаже тягачей 5 различные сцепные части 2 и/или придавать их прицепу 4.
За счет этого можно также для каждого тягача 5 предварительно определять для различных, в частности, предлагаемых в продаже прицепов 4, различные сцепные части 2 и/или придавать их тягачу 5.
В этом случае при замене тягача 5 при том же прицепе 4 можно лишь монтировать на этом тягаче 5 согласованную с этим тягачом 5 сцепную часть 2 и, возможно, устанавливать режим движения по прямой системы 1 принудительного управления, как указывалось выше, за счет чего снижаются затраты при соединении прицепа 4 и обеспечивается боковая устойчивость и маневренность прицепа 4. За счет подходящего выбора сцепной части 2 можно, в частности, при замене первого тягача 5 на другой, отличный от него второй тягач 5, предоставлять точку 11 сцепления и точку 12 шарнирного соединения на втором тягаче 5 так, что нет необходимости в дополнительной настройке системы 1 принудительного управления относительно движения по прямой и отклонения управляемых колес 41. При этом дополнительные затраты при присоединении прицепа 4 особенно малы, при этом согласование характеристик следования прицепа 4 по существу происходит за счет выбора этой комбинации транспортных средств, т.е. согласованной с этой комбинацией прицепа 4 и второго тягача 5 сцепной части 2.
Соединение первого гидравлического цилиндра 61 со сцепной частью 2 схематично показано, в частности, на фиг.3, на которой показан по существу лишь первый гидравлический цилиндр 61 и сцепная часть 2. Кроме того, на фиг.3 показаны точка 11 сцепления, точка 12 шарнирного соединения, первый сцепной шар 22, второй сцепной шар 22 и продольная рулевая тяга 33, которая содержит первый гидравлический цилиндр 61. Сцепная петлевая часть 3 схематично показана, в частности, на фиг.6. При этом сцепная петлевая часть 3 может быть выполнена по существу в виде дышла 31 и содержать продольную рулевую тягу 33. Сцепная петлевая часть 3 содержит сцепную петлю 35 для передачи тяговых усилий от сцепной части, в частности от точки 11 сцепления, на прицеп, а продольная рулевая тяга 33 содержит управляющую петлю 36 для передачи сил управления от сцепной части 2, в частности от точки 12 шарнирного соединения, в систему 1 принудительного управления.
Предпочтительно, многие комбинации транспортных средств, т.е. многие комбинации различных тягачей 5 и/или различных прицепов 4, которые имеют аналогичные характеристики следования прицепа 4, можно сводить в несколько возможных классов в зависимости от сцепной части, при этом количество классов по сцепной части может быть задано. За счет этого можно минимизировать количество применяемых различных сцепных частей 2, так что могут быть уменьшены затраты на изготовление и, в частности, на складское хранение сцепных частей у пользователя.
Предпочтительно, может быть предусмотрено, что с каждым из множества различных тягачей 5 согласован комплект распорок (поддерживающих дистанцию элементов) 32 для крепления на прицепе 4, предпочтительно на дышле 31 и/или на сцепной петлевой части 3, при этом распорка 32 предусмотрена для контактирования с шинами 52 тягача 5 при задаваемом угле между тягачом 5 и прицепом 4. За счет этого можно предотвращать отклонение системы 1 принудительного управления за максимальный угол так, что угол сгиба от тягача 5 к прицепу 4, в частности, относительно сцепной петлевой части 3, предпочтительно относительно дышла 31, может быть ограничен. Угол сгиба, который соответствует углу между тягачом 5 и прицепом 4, и который измеряется между продольной средней осью 55 тягача 5 и проходящей через сцепную петлевую часть 3 продольной средней осью 38 сцепной петлевой части 3, при движении комбинации транспортных средств по прямой, как показано на фиг.1, составляет 0° и может составлять при управлении тягачом 5, как показано на фиг.2, до 90°.
Предпочтительно, максимальный угол сгиба можно ограничивать с помощью комплекта распорок 32 как при отклонении влево, так и при отклонении вправо тягача 5 до 45°-60°, при этом этот вид ограничения угла сгиба показан на фиг.6. При этом предпочтительно, что максимальный угол сгиба соответствует задаваемому углу сгиба между тягачом 5 и прицепом 4, при котором шины 52 заднего моста 51 тягача 5 приходят в контакт с распорками 32. Предпочтительно, при контакте создается шум и сигнализируется максимальный угол сгиба, при этом сцепная петлевая часть 3, дышло 31 и/или шины 52 тягача 5 не повреждаются.
Для этого распорка 32 может быть выполнена из нескольких частей и содержать нижнюю часть 321 распорки и верхнюю часть 322 распорки. За счет этого нижняя часть 321 распорки может быть выполнена для согласования максимального прохождения распорки 32 от сцепной петлевой части 3, в частности от дышла 31, а верхняя часть 322 распорки - для создания шума.
При этом нижняя часть 321 распорки может быть выполнена по существу в форме прямоугольного параллелепипеда и, в частности, по существу из металлического листа.
При этом верхняя часть 322 распорки может быть выполнена по существу полукруглой, изогнутой или в виде перемычки и, в частности, по существу из пластмассы, в частности из эластомера и/или термопласта.
При этом верхняя часть 322 распорки может быть соединена разъемно с крепежным приспособлением на нижней части 321 распорки. За счет этого можно соединять друг с другом различные нижние части 321 распорки и различные верхние части 322 распорки, за счет чего из немногих различных нижний частей 321 распорки и немногих различных верхних частей 322 распорки можно создавать много распорок 32 различной геометрии и различного создания шума при соприкосновении шин 52 и распорок 32.
Предпочтительно может быть предусмотрено, что по меньшей мере одна сцепная часть 2 имеет в точке 11 сцепления первый сцепной шар 21 и в точке 12 шарнирного соединения - второй сцепной шар 22, при этом при сцепке прицепа 4 с тягачом 5 по меньшей мере одна сцепная часть 2 соединяется в точке 11 сцепления с первым сцепным шаром 21, а в точке 12 шарнирного соединения - со вторым сцепным шаром 22. За счет этого можно просто выполнять сцепку прицепа 4 с тягачом 5, и может надежно осуществляться передача силы тяги, а также передача сил управления.
Сцепная петля 35 и управляющая петля 36 могут быть выполнены, как показано на фиг.6, в форме полушаровых чаш в виде не сквозной чаши сцепной петли и чаши управляющей петли для надевания на первый сцепной полушар 21 и/или второй сцепной полушар 22.
В предпочтительной модификации может быть предусмотрено, что сцепная петлевая часть 3 содержит предназначенную для соединения в точке 12 шарнирного соединения продольную рулевую тягу 33, и что продольная рулевая тяга 33 содержит первый гидравлический цилиндр 61. За счет этого можно сцеплять сцепную петлевую часть 3 с продольной рулевой тягой 33 в точке 12 шарнирного соединения и соединять первый гидравлический цилиндр 61 с помощью продольной рулевой тяги 33 с точкой 12 шарнирного соединения. При этом предпочтительно, что обычные системы принудительного управления можно применять также со сцепной частью 2, в частности с различными сцепными частями 2, за счет чего можно обеспечивать правильную работу расположенной на стороне прицепа части системы 1 принудительного управления также без изменения, в частности без изменения конструкции.
Предпочтительно может быть предусмотрено, что по меньшей мере один вызывающий непосредственно отклонение по меньшей мере одного колеса 41 прицепа 4 второй гидравлический цилиндр 62 соединен с помощью трубопроводной системы 63 с первым гидравлическим цилиндром 61. В этой связи принудительное управление отклонением вызывающего непосредственно отклонение по меньшей мере одного колеса 41 прицепа 4 второго гидравлического цилиндра 62 можно осуществлять с помощью первого гидравлического цилиндра 61. Это происходит предпочтительно в режиме принудительного управления системы 1 принудительного управления, при этом первый гидравлический цилиндр 61 механически соединен с точкой 12 шарнирного соединения, первый гидравлический цилиндр 61 соединен гидравлически со вторым гидравлическим цилиндром 62 и второй гидравлический цилиндр 62 соединен механически с управляемыми колесами 41 управляемого заднего моста 44.
В частности, может быть предусмотрено, что второй гидравлический цилиндр 62 находится в зацеплении с поперечной рулевой тягой 7 прицепа, при этом с помощью второго гидравлического цилиндра 62 можно принудительно управлять положением поперечной рулевой тяги 7 прицепа. За счет этого можно с помощью лишь одного второго гидравлического цилиндра 62 управлять углом отклонения обоих управляемых колес 41 управляемого заднего моста 44. Этот предпочтительный вариант выполнения системы 1 принудительного управления показан на фиг.1, 2 и 4.
В другом предпочтительном варианте выполнения вместо одного второго гидравлического цилиндра 62 и поперечной рулевой тяги 7 прицепа 4 могут быть предусмотрены два вторых гидравлических цилиндра 62, как это показано на фиг.5. При этом расположенные на стороне колес концы 45 обоих гидравлических цилиндров 62 по существу непосредственно соединены с управляемыми колесами 41, за счет чего можно отказаться от выполнения поперечной рулевой тяги 7.
Особенно предпочтительно может быть предусмотрено, что трубопроводная система 63 в зоне первого гидравлического цилиндра 61 имеет первое устройство 65 выравнивания давления и/или в зоне второго гидравлического цилиндра 62 второе устройство 66 выравнивания давления. При этом может быть предусмотрено, что пики давления в трубопроводной системе 63 в зоне первого гидравлического цилиндра 61 выравниваются с помощью первого устройства 65 выравнивания давления и/или в зоне второго гидравлического цилиндра 62 с помощью второго устройства 66 выравнивания давления.
При этом предпочтительно, что удары и/или чрезмерные давления в первом гидравлическом цилиндре 61, которые могут возникать при движении, в частности при движении по неровной почве, передаются, в частности, с ослаблением во второй гидравлический цилиндр 61 и/или в трубопроводную систему 63. За счет этого можно предотвращать и/или уменьшать пики напряжения в механических частях и/или в гидравлической жидкости трубопроводной системы 63, второго гидравлического цилиндра 62 и/или в частности, в управляемом заднем мосте 44, содержащем управляемые колеса и, возможно, поперечную рулевую тягу 7. При этом предпочтительно, что может обеспечиваться большой срок службы и/или проходимость системы принудительного управления.
Первое устройство 65 выравнивания давления и/или второе устройство 66 выравнивания давления может быть выполнено в виде аккумулятора давления 80 бар и/или в виде аккумулятора давления 50 бар. При этом аккумулятор давления 80 бар может выравнивать чрезмерное давление, возникающее при слишком большом угле сгиба, например, когда тягач 5 тянет прицеп 4 без комплекта распорок 32 и может, соответственно, сильно отклоняться.
При этом аккумулятор давления 50 бар может выравнивать кратковременные пики напряжения, которые могут передаваться, в частности, при движениях отклонения и/или при неровностях грунта с точки 12 шарнирного соединения в систему 1 принудительного управления.
В этой связи аккумуляторы давления 80 бар и/или аккумуляторы давления 50 бар могут быть выполнены в виде азотных аккумуляторов. Азотный аккумулятор может быть выполнен в виде небольшого, в частности, шарообразного резервуара, в котором образован разделительный слой для пространственного отделения находящегося под давлением азота и гидравлической жидкости. При этом можно задавать давление азота в соответствии с рабочим давлением и/или рабочей точкой азотного аккумулятора. За счет этого можно выполнять первое устройство 65 выравнивания давления и/или второе устройство 66 выравнивания давления просто, дешево, с экономией конструктивного пространства и/или с экономией веса.
Другие варианта выполнения изобретения имеют лишь часть указанных выше признаков, при этом могут быть предусмотрены любые комбинации признаков, в частности, также различных указанных выше вариантов выполнения.
Реферат
Группа изобретений относится к системе принудительного управления для применения с прицепом и несколькими различными тягачами. Система принудительного управления содержит сцепную часть для расположения на тягаче (5) и сцепную петлевую часть (3) для расположения на прицепе (4). Сцепная часть и сцепная петлевая часть (3) предназначены для сцепления друг с другом в точке сцепления и в расположенной на расстоянии от точки сцепления точке шарнирного соединения. На каждом из множества различных тягачей (5) с помощью предварительно согласованной с этим тягачом (5) сцепной части точка сцепления и точка шарнирного соединения расположены соответственно на заданном расстоянии от заднего моста (51) тягача (5) так, что настройка оптимального углового соотношения угла между тягачом (5) и петлевой частью (3) относительно угла отклонения управляемых колес (42) прицепа (4) может быть гарантирована для различных комбинаций транспортных средств. Достигается создание системы принудительного управления без дополнительного оборудования, которая при многих различных тягачах обеспечивает возможность качения лежащих друг за другом колес нескольких задних мостов прицепа при движении в поворотах с боковой устойчивостью. 2 н. и 12 з.п. ф-лы, 6 ил.
Формула
- для расположения точки (11) сцепления и точки (12) шарнирного соединения на задаваемом расстоянии до заднего моста (51) тягача (5) в зависимости от соответствующего тягача (5) из указанных различных тягачей (5) располагают предварительно согласованную с этим тягачом (5) сцепную часть (2) на тягаче (5) так, настройка оптимального углового соотношения угла между тягачом (5) и сцепной петлевой частью относительно угла отклонения управляемых колес (41) прицепа (4) может быть гарантирована для различных комбинаций транспортных средств,
- сцепляют друг с другом сцепную петлевую часть (3), которая расположена на прицепе (4), со сцепной частью (2) в точке (11) сцепления и в расположенной на расстоянии от точки (11) сцепления точке (12) шарнирного соединения.
Комментарии