Рулевой привод транспортного средства с двумя управляемыми мостами - SU1518186A1
Код документа: SU1518186A1
Чертежи
Описание
Изобретение относится к транспортному машиностроению, в частности к транспортным средствам с двумя управляемыми мостами.
Цель изобретения - повышение эффективности рулевого привода за счет возможности реализации различных схем поворота.
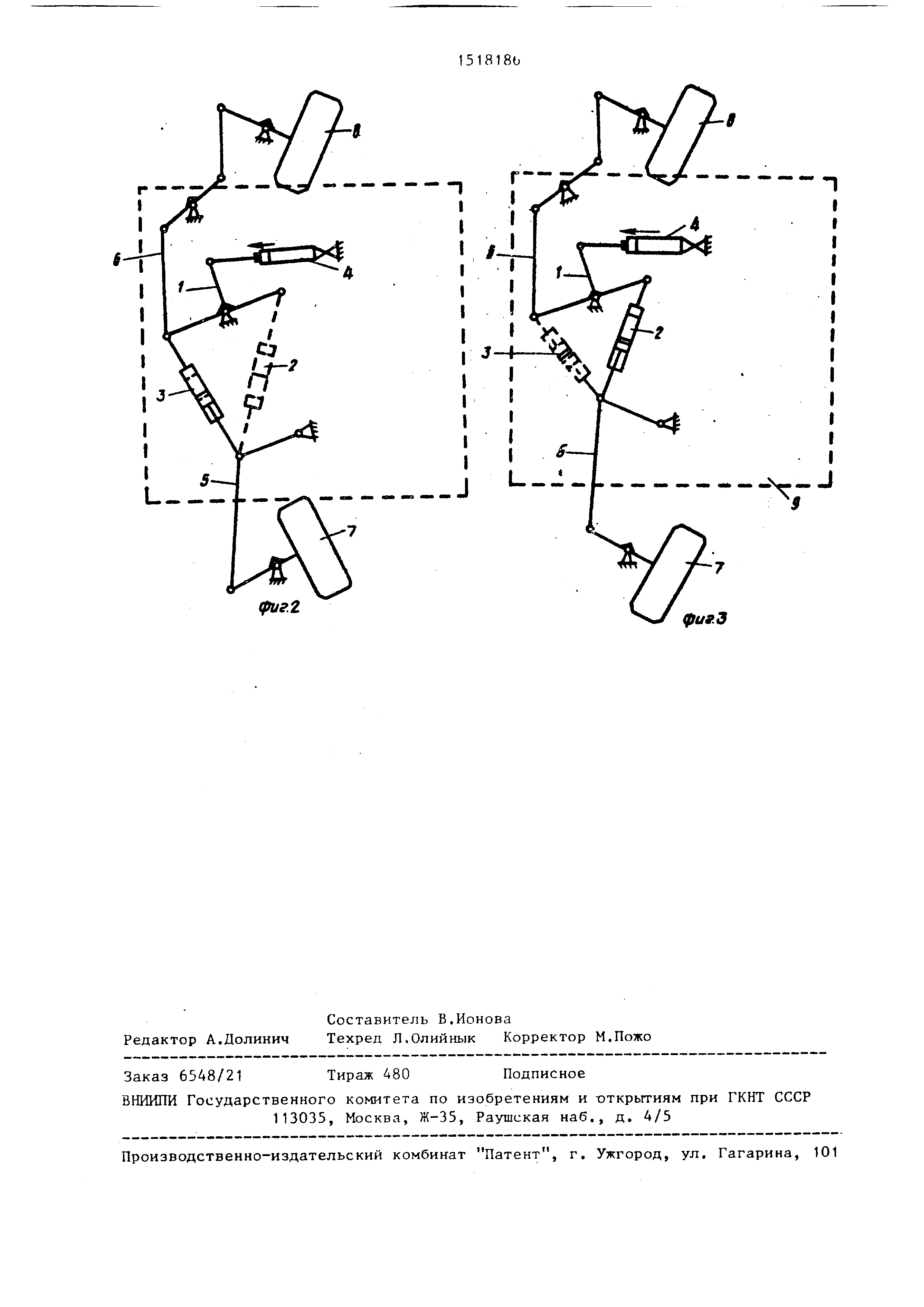
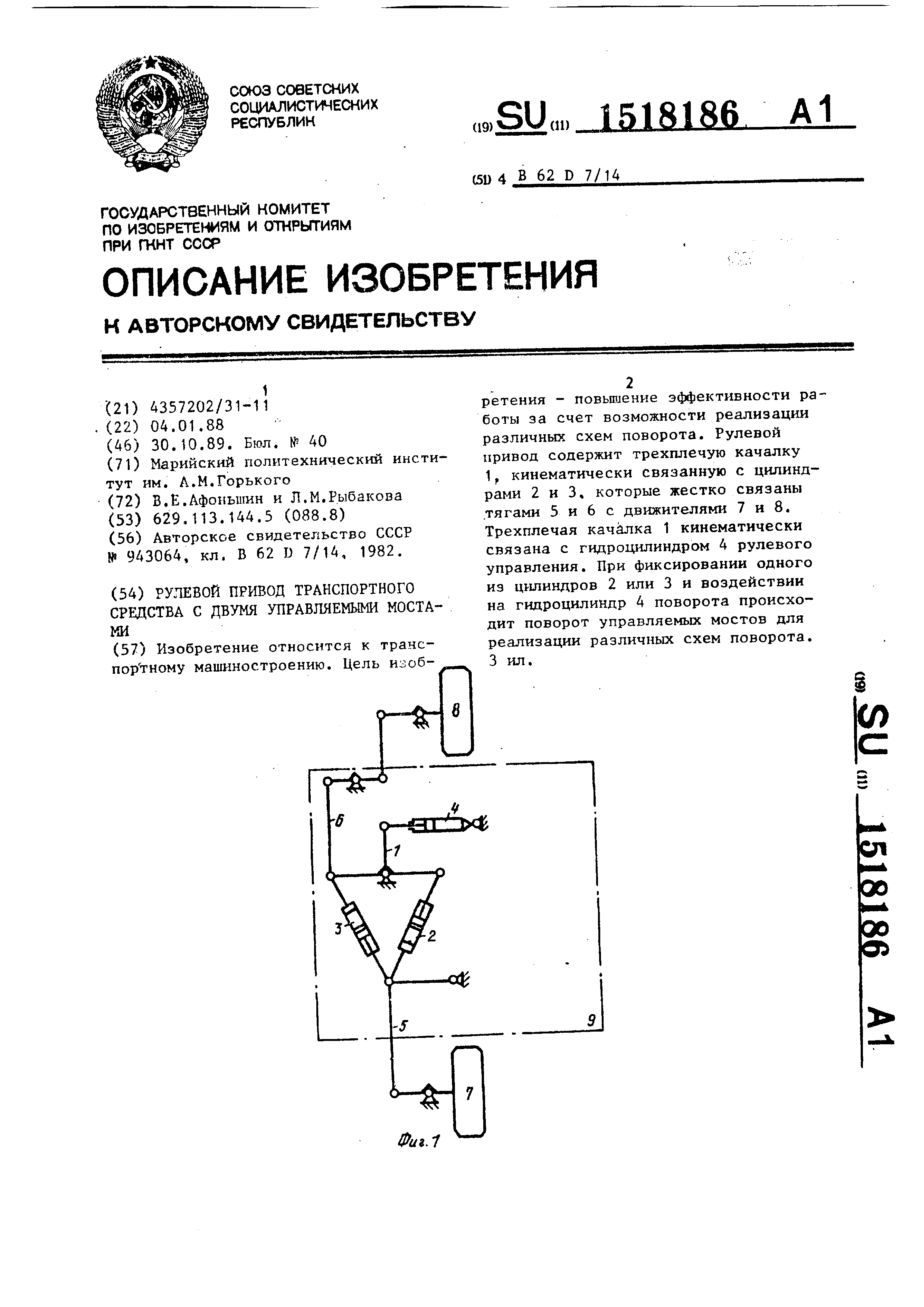
На фиг,1 изображен рулевой привод транспортного средства, например, с двумя движителями; на фиг.2 - поворот оботс управляемых мостов; на фиг.З - положение элементов рулевого привода во время передвижения машины в сторону без изменения направления оси машины.
Рулевой привод содержит трехпле- чую качалку 1, кинематически соединенную с цилиндрами 2 и 3 гидроцилиндра 4, кинематически связанного с трехплечей качалкой 1, цилиндры 2, 3, шарнирно связаны тягами 5, 6 с движителями 7,8. Ось трехплечей качалки 1 шарнирно закреплена на корпусе 9,
Фиксируя штоки в определенном положении , двухцилиндровое звено обеспечивает его работу как жесткого звена определенной длины.
При движении транспортного средства в сторону без изменения направления оси машины (см. фиг.З) гидроцилиндр 4 отклоняет трехплечую качалку 1 от нейтрального положения, при этом цилиндр 2 будет работать как жесткая связь, а цилиндр 3 будет находиться в плавающем положении, тяги 5 и 6 соответственно связанные с движителями 7 и 8, повернут последние в одном направлении на один и тот же угол.
При включении цилиндра 2 в плавающее положение, цилиндра 3 - в жесткую связь отклонение трехплечей качалки 1 от нейтрального положения позволит обеспечить разворот транспортного средства с минимальным радиусом. Положение движителей и элементов рулевого привода во время разворота с минимальным радиусом показаны на фиг.2. Формула изобретения
5 Рулевой привод транспортного средства с двумя управляемыми мостами содержащий рулевые трапеции каждого управляемого моста, кинематически связанные между собой и гидроцилиндр
Q поворота, шарнирно закрепленный одним своим концом на раме транспортного средства, отличающий- с я тем что с целью повьш1ения эффективности работы за счет возмож5 ности реализации различных схем поворота , кинематическая связь трапеции каждого моста выполнена в виде трехплечей качалки ширнирно закрепленной на раме одно плечо которой
Q шарнирно связано с другим концом гидроцилиндра noBopoTaj другое - с рулевой трапецией одного из управляемых мостов и через первый дополнительный цилиндр - с рулевой трапецией другого управляемого моста и шарнирно через рычаг с рамой транспортного средства, а третье - через второй дополнительный цилиндр с рулевой трапецией другого управляемого моста.
5
gnjf.z
-J

Реферат
Изобретение относится к транспортному машиностроению. Цель изобретения - повышение эффективности работы за счет возможности реализации различных схем поворота. Рулевой привод содержит трехплечую качалку 1, кинематически связанную с цилиндрами 2 и 3, которые жестко связаны тягами 5 и 6 с движителями 7 и 8. Трехплечая качалка 1 кинематически связана с гидроцилиндром 4 рулевого управления. При фиксировании одного из цилиндров 2 или 3 и воздействии на гидроцилиндр 4 поворота, происходит поворот управляемых мостов для реализации различных схем поворота. 3 ил.
Формула
Комментарии