Гидравлические системы рулевого управления для колес транспортных средств - RU2766920C1
Код документа: RU2766920C1
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к гидравлическим системам рулевого управления для колес транспортных средств и к транспортным средствам, оборудованным такими системами.
УРОВЕНЬ ТЕХНИКИ
Гидравлические системы рулевого управления обычно используются в таких транспортных средствах как вилочные автопогрузчики. Обычно, гидравлический цилиндр управляет вращением кронштейна колеса главным образом вокруг вертикальной оси поворота. Вытягивание или втягивание соединительного штока цилиндра толкает или тянет точку смешения на кронштейн колеса и вызывает вращение кронштейна вокруг оси поворота, тем самым управляя установленным на кронштейне колесом.
Пример такой системы рулевого управления раскрыт в WO 2014/075921. Раскрыта пара рулевых колес, каждое из которых управляется гидравлическим цилиндром, причем данные цилиндры последовательно соединены так, что они работают синхронно на своих соответствующих колесах. Каждый гидравлический цилиндр неподвижно установлен на шасси транспортного средства и содержит активный соединительный шток, выполненный с возможностью обычным образом совершать возвратно-поступательное движение. Рычаг рулевого управления действует как связующее звено между свободным (дистальным) концом соединительного штока и кронштейном колеса, при этом рычаг рулевого управления соединен с возможностью поворота как с соединительным штоком, так и с кронштейном колеса. Неподвижная установка цилиндра позволяет подсоединять к цилиндру жесткие гидравлические трубопроводы (например металлические трубы) вместо обычных гибких трубопроводов.
Недостатком такой системы является то, что вектор силы, действующий через рычаг рулевого управления, изменяется по направлению во всем диапазоне углов поворота рулевого колеса. В некоторых точках цикла рулевого управления, вектор силы направлен под углом к соединительному штоку, где он имеет значительную поперечную составляющую. Это создает нагрузку на уплотнения цилиндра и может привести к выходу из строя гидравлического уплотнения. Это также требует большего и более прочного соединительного штока для сопротивления критической силе при продольном изгибе и усиленных уплотнений для соединительного штока на цилиндре. Поскольку цилиндры гидравлически связаны, пассивный соединительный шток проходит из задней части каждого гидравлического цилиндра для уплотнения камеры за поршнем, а также передаются поперечные усилия на пассивный соединительный шток и уплотнения в задней части цилиндра. Кроме того, необязательно существует предполагаемое преимущество жестких гидравлических трубопроводов по сравнению с гибкими. Жесткие гидравлические трубопроводы являются более дорогими в изготовлении, более дорогими при замене и они могут быть менее надежными, особенно на самоходном оборудовании из-за вибрации.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В настоящем изобретении предложена система рулевого управления для колеса транспортного средства, содержащая:
кронштейн колеса для установки управляемого колеса, причем кронштейн колеса установлен с возможностью вращения относительно транспортного средства вокруг оси поворота, что позволяет управлять колесом;
гидравлический цилиндр, содержащий поршень и узел жесткого соединительного штока, выходящий из поршня цилиндра;
причем узел жесткого соединительного штока содержит первую секцию, выполненную с возможностью возвратно-поступательного перемещения в цилиндр и из него, и вторую секцию, которая жестко проходит от первой секции к соединению точки поворота, где она соединена с возможностью поворота с кронштейном колеса со смещением от оси поворота; и
причем гидравлический цилиндр установлен с возможностью поворота на транспортном средстве таким образом, что он не может перемещаться поступательно относительно транспортного средства, но может изменять свое положение относительно транспортного средства.
Благодаря оснащению установленного с возможностью поворота гидравлического цилиндра узлом жесткого соединительного штока, который проходит непосредственно к точке поворота, на кронштейне колеса можно избежать использования двухповоротного рычага рулевого управления или рычажного механизма. Гидравлический цилиндр может изменять свое положение, чтобы обеспечить изменение угла положения точки поворота на кронштейне колеса. Таким образом, усилия поперечной потери устойчивости сводятся к минимуму.
Хотя система рулевого управления является гидравлической, ее можно использовать в транспортных средствах, имеющих любую систему привода (другими словами, не только в транспортных средствах с гидравлическим приводом). Так, например, ее можно использовать в грузовиках с гидравлическим приводом, транспортных средствах с двигателями внутреннего сгорания, гибридных транспортных средствах, электромобилях и т. д.
Предпочтительно, указанная первая секция представляет собой прямолинейную секцию штока, и указанная точка поворота расположена линейно соосно с первой секцией.
Таким образом, вектор силы из точки поворота направлен по линии прямого линейного участка соединительного штока и по оси самого гидравлического цилиндра, тем самым полностью устраняя любую дополнительную поперечную деформацию на уплотнениях цилиндра.
Кроме того, указанная точка поворота, точка, в которой вторая и первая секции жестко соединены, ось первой секции, ось цилиндра и местоположение, в котором цилиндр установлен с возможностью поворота на транспортном средстве предпочтительно являются коллинеарными.
Предпочтительно, вторая секция представляет собой изогнутый элемент, проходящий между первой секцией и соединением точки поворота, причем изогнутый элемент определяет вогнутая поверхность, которая может вмещать часть кронштейна колеса.
Эта вогнутая поверхность может расширять диапазон углов поворота рулевого колеса, позволяя вращать точку поворота «вокруг» части кронштейна колеса, такой как втулка или подшипник.
Предпочтительно, вогнутая поверхность вмещает часть кронштейна колеса, когда угол поворота рулевого колеса является максимальным в одном направлении.
Предпочтительно, указанная вторая секция представляет собой дугообразный элемент.
Узел соединительного штока может представлять собой выполненную как единое целое конструкцию, содержащую указанные первую и вторую секции. (Другими словами термин «узел» не подразумевает, что первая и вторая секции должны быть отдельными объектами, соединенными вместе, поскольку элемент, выполненный как единое целое, может быть изготовлен так, чтобы содержать обе секции).
В предпочтительных на данный момент вариантах осуществления, узел соединительного штока содержит соединительный шток в качестве указанного первого элемента и жестко прикрепленный к соединительному штоку удлиненный элемент в качестве указанного второго элемента.
Жесткое крепление удлиненного элемента к соединительному штоку исключает использование шарнирного соединения в этой точке.
Предпочтительно, система рулевого управления дополнительно содержит пассивный шток, который проходит от цилиндра в направлении противоположном соединительному штоку и установлен на общем с ним поршне или поршневом узле, причем пассивный шток уплотняет цилиндр в направлении от колеса и позволяет синхронизировать цилиндр с другим гидравлическим цилиндром по двухтактной схеме.
Если синхронизация не требуется или если необходимо применить альтернативный способ синхронизации можно не использовать такой пассивный шток.
Также система может содержать колесо, установленное на указанном кронштейне колеса.
Предпочтительно, система дополнительно содержит гидравлический контур, содержащий: гидравлический насос, соединительный элемент гидравлического насоса с гидравлическим цилиндром и средство для управления потоком гидравлической жидкости в гидравлическом контуре в ответ на поворот рулевого колеса.
В другом аспекте предложена система рулевого управления транспортного средства, содержащая: первую систему рулевого управления для первого колеса транспортного средства по любому из пунктов 1-9, вторую систему рулевого управления для второго колеса транспортного средства по любому из пунктов 1-9 и гидравлический контур, последовательно соединяющий гидравлические цилиндры первой и второй систем рулевого управления.
Также предложено транспортное средство, содержащее систему рулевого управления по любому из пунктов 1-10.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Теперь изобретение будет проиллюстрировано с помощью последующего описания вариантов его осуществления, приведенных только в качестве примера, со ссылкой на прилагаемые чертежи, на которых:
На Фиг. 1-3 представлены виды в перспективе системы рулевого управления для колеса транспортного средства, показанные при разных углах поворота рулевого колеса;
На Фиг. 4-6 представлены виды сверху системы рулевого управления, показанные при таких же углах поворота рулевого колеса, что и на Фиг. 1-3, соответственно;
На Фиг. 7 представлен вид сверху транспортного средства, оборудованного системой рулевого управления, показанной в штатном режиме рулевого управления.
На Фиг. 8 представлен вид сверху транспортного средства на Фиг. 7, показанного в режиме поворота рулевого управления в сторону;
На Фиг. 9 представлен общий гидравлический контур для системы рулевого управления транспортного средства, используемый в транспортном средстве на Фиг. 7 и 8 в режиме поворота в сторону; и
На Фиг. 10 представлен детальный чертеж гидравлического контура, показанного на Фиг. 9.
Подробное описание предпочтительных вариантов осуществления
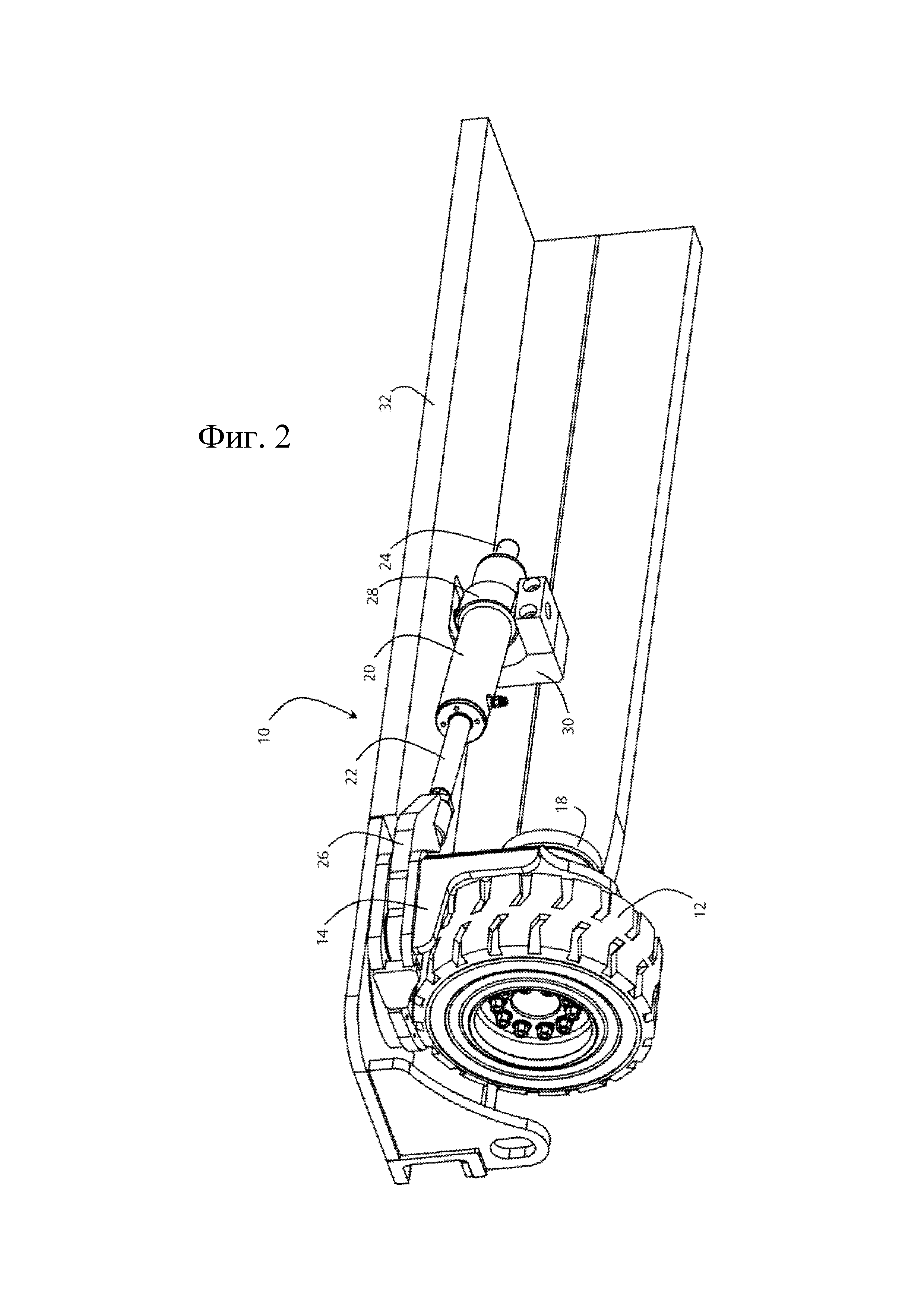
Как показано на Фиг. 1-3, система рулевого управления 10 для колеса транспортного средства 12 показана на виде в перспективе.
На Фиг. 1 показана система, когда колесо 12 повернуто прямо. На Фиг. 2 показана система, когда колесо 12 повернуто под прямым углом, т.е. повернуто на 90° для поворота в сторону. На Фиг. 3 показана система, когда колесо 12 повернуто на его максимальную величину, превышающую 90°, до поворота на угол приблизительно 135°.
Колесо 12 установлено на кронштейне 14 колеса, который, в свою очередь, установлен на подшипнике или втулке 16, что позволяет колесу вращаться вокруг вертикальной оси относительно шасси 32 транспортного средства. Привод 18, который, например, может быть гидравлическим или электрическим, установлен на колесе 12, что позволяет колесу двигаться вперед или в обратном направлении. Следует понимать, что свойство системы привода транспортного средства и соединение системы привода с колесом, не являются существенными для системы рулевого управления и могут быть изменены в соответствии с предпочтениями разработчика или производителя. Так, например, вместо гидравлического или электрического двигателя, установленного на колесе, двигатель может быть соединен с колесом, используя приводной вал или зубчатую передачу. Двигатель может быть двигателем внутреннего сгорания, гибридным или электрическим, гидравлическим или любым другим.
Рулевое управление колеса управляется гидравлическим цилиндром 20, который содержит активный соединительный шток 22 (Фиг. 2 и 3, невидимый на Фиг. 1) и пассивный шток 24. Соединительный шток 22 представляет собой первую секцию узла жесткого соединительного штока и выполнен с возможностью возвратно-поступательного перемещения в цилиндр и из него.
На Фиг. 1 показана система, когда соединительный шток полностью втянут в цилиндр 20, на Фиг. 2 показан соединительный шток 20, который частично выведен из цилиндра, на Фиг. 3 показан соединительный шток при его максимальном выходе из цилиндра.
Вторая секция 26 узла жесткого соединительного штока выполнена в виде жесткой стальной плиты, которая соединена жестко (т.е. без свободы движения, вращения или поворота) с соединительным штоком 22. Таким образом, когда соединительный шток 22 совершает возвратно-поступательное перемещение в цилиндр 20 и из него, вторая секция движется соответственно к цилиндру и прямо от него.
Пассивный шток 24 отсоединен на своем свободном конце и служит для обеспечения возможности гидравлического соединения цилиндра и синхронизации с цилиндром системы рулевого управления для другого колеса по нижеописанной двухтактной схеме. От этого пассивного штока можно отказаться, если не требуется такая синхронизация, или его можно заменить альтернативным механизмом синхронизации, таким как отдельный синхронизирующий цилиндр или соответствующими гидравлическими насосными системами, приводящими в действие механизм рулевого управления на другом колесе.
В поршне предусмотрен заливной клапан (не показан). Как известно из данной области техники, такой заливной клапан полезен для заливки системы при начальном запуске и для поддержания заправки и синхронизации цилиндров при использовании в многоцилиндровой системе, такой как описанная со ссылкой на Фиг. 7-10.
Гидравлический цилиндр установлен с возможностью поворота на транспортном средстве так, что он не может поступательно перемещаться относительно транспортного средства, но может изменять свое положение относительно него. Шарнирное крепление обеспечивается упорным кольцом 28, прикрепленным к внешней стороне цилиндра, при этом кольцо представляет собой опорную цапфу, установленную в стационарном кронштейне 30, приваренном к шасси 32 транспортного средства.
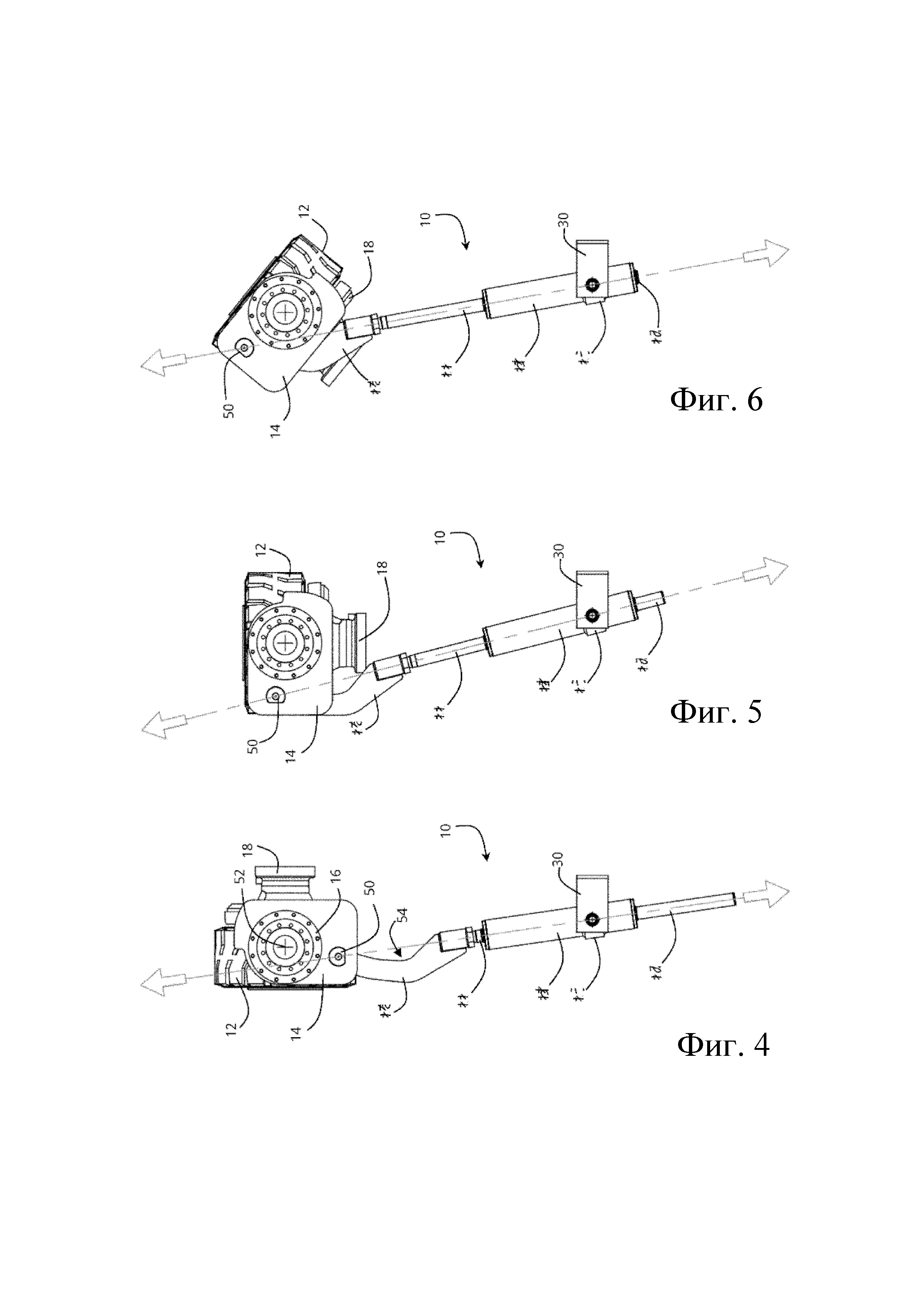
Дополнительно ссылаясь на Фиг. 4-6, работа системы рулевого управления для колеса транспортного средства показана на виде сверху.
Переходя от Фиг. 4 к Фиг. 5 и Фиг. 6 можно увидеть, что узел жесткого соединительного штока 22, 26 постепенно отталкивается от цилиндра. Вторая секция 26, жестко закреплена на первой секции (соединительном штоке) 22, сохраняя свое угловое расположение, и линейно перемещается от цилиндра 20.
Дистальный конец второй секции 26 (т.е. конец, удаленный от цилиндра) соединен с возможностью поворота с кронштейном колеса 14 в точке 50 поворота. Поскольку эта точка 50 поворота смещена от центра вращения 52 подшипника 16, он перемещается в поперечном направлении относительно цилиндра 20 при выдвижении соединительного штока. Вследствие установки с возможностью поворота цилиндра 20 на шасси, положение цилиндра изменяется по мере выдвижения соединительного штока, что можно увидеть при переходе от Фиг. 4 к Фиг. 6.
Отсутствие поперечного перемещения между цилиндром 20, первой секцией 22 и второй секцией 26, устраняет деформации на уплотнениях цилиндра. Кроме того, можно заметить, что все точки цикла рулевого управления, точка 50 поворота, точка, в которой жестко соединены вторая секция 26 и первая секция 22, ось первой секции 22, ось цилиндра 20 и местоположение, в котором цилиндр установлен с возможностью поворота на транспортном средстве (т. е. поворот между кольцом 28 и кронштейном 30) являются коллинеарными. Все векторы силы (обозначенные широкими стрелками на Фиг. 4-6) направлены вдоль этой коллинеарной оси, что обеспечивает отсутствие каких-либо поперечных сил на цилиндре или соединительных штоках 22, 24.
Вторая секция 26 имеет форму изогнутого элемента, проходящего между первой секцией 22 и соединением 50 точки поворота. Изогнутый элемент определяет вогнутая поверхность 54, в которой может находиться часть кронштейна колеса. Это можно увидеть на Фиг. 6, где вогнутая поверхность 54 вмещает часть кронштейна колеса под втулкой, поскольку угол поворота превышает 90° до его максимального угла (в данном варианте) 135°. Таким образом, дугообразная вторая секция 26 передает усилия от точки поворота по прямой линии, проходящей через часть втулки.
В зависимости от выбранных форм и размеров и по желанию разработчика, максимальный угол поворота может быть больше или меньше чем 135°. В альтернативном расположении второй элемент может быть установлен выше кронштейна колеса и вмещать часть втулки или подшипника 16.
В проиллюстрированном варианте осуществления соединительный шток 22 вставлен и жестко закреплен (например с помощью сварки) в гнезде, образованном на проксимальном конце второй секции. Однако могут быть использованы и другие жесткие монтажные приспособления. Кроме того, использование термина «узел» (как узел жесткого соединительного штока) не означает, что первая и вторая секции должны быть отдельными элементами, которые собираются вместе. Узел жесткого соединительного штока может представлять собой выполненный как единое целое элемент с определенными частями, содержащий: первую часть или секцию, выполненную с возможностью возвратно-поступательного перемещения внутри цилиндра и вторую часть или секцию, проходящую от первой части к кронштейну колеса.
Показанная на Фиг. 1-6 система рулевого управления для колеса транспортного средства может быть включена в общую систему рулевого управления колеса как показано на Фиг. 7-10. Рассматриваемое транспортное средство представляет собой вилочный автопогрузчик, но система рулевого управления может быть реализована в любом транспортном средстве, для которого подходит гидравлическое рулевое управление.
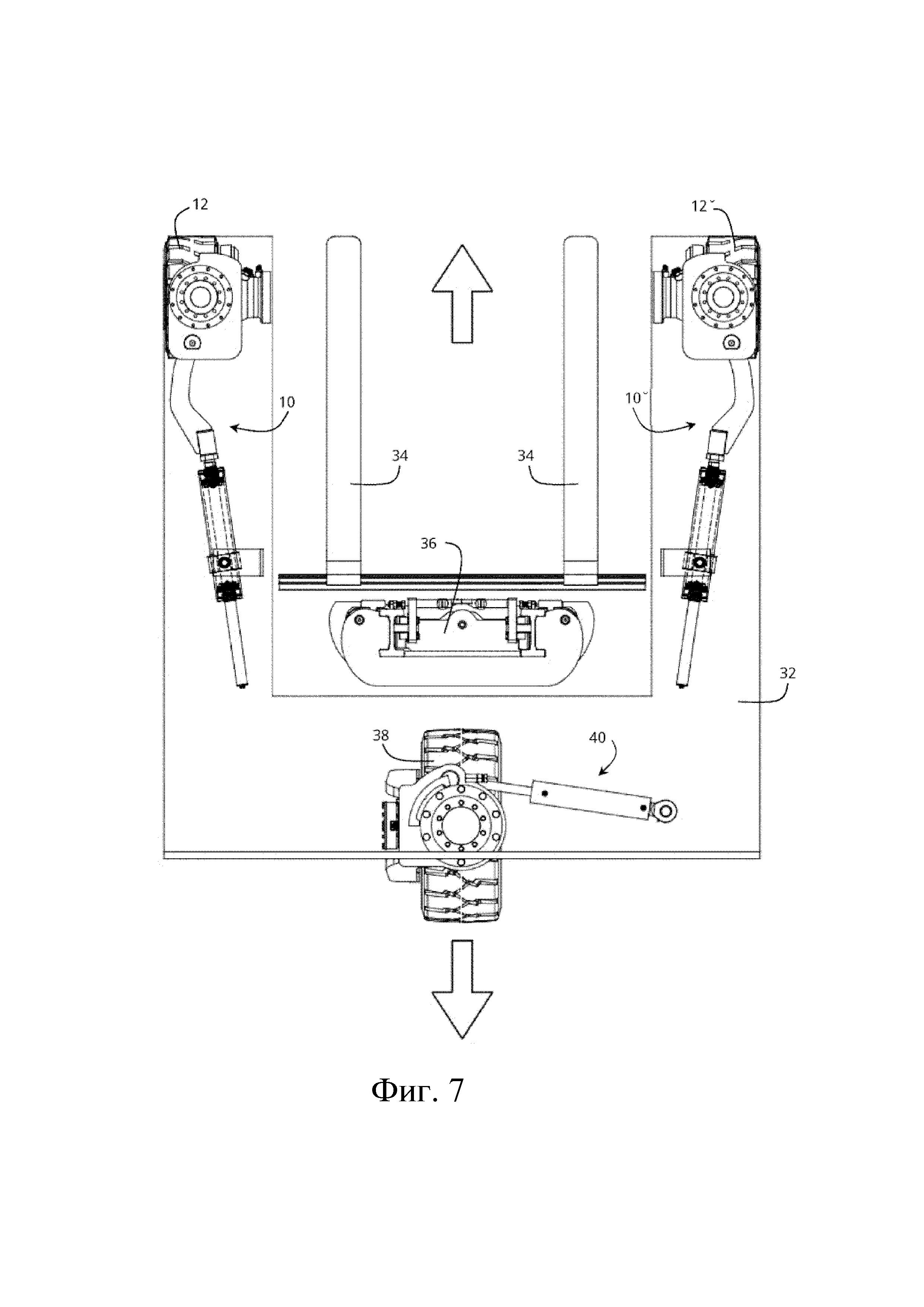
Ссылаясь сначала на Фиг. 7, вилочный автопогрузчик показан на виде сверху. Изображение транспортного средства упрощено для того, чтобы показать шасси 32, вильчатый захват 34, механизм 36 подъема вильчатого захвата, колеса и устройство рулевого управления, которые теперь будут описаны.
Левое переднее колесо 12 и система рулевого управления 10 в точности являются такими как описанные выше в отношении Фиг. 1-6, устанавливаются спереди слева. Правое переднее колесо 12’ управляется системой рулевого управления 10’, которая является зеркальным отображением системы рулевого управления 10. В задней части транспортного средства установлено управляемое ведущее заднее колесо с собственным (общеизвестным) цилиндром 40 рулевого управления. Однако известный цилиндр рулевого управления можно заменить системой рулевого управления колеса транспортного средства в соответствии с изобретением.
На Фиг. 7 показано транспортное средство в штатном режиме рулевого управления. Все три колеса 12, 12’ и 38 выровнены с ведущей осью транспортного средства, т.е. выровнены параллельно вильчатым захватам 34. В этом режиме рулевого управления системы рулевого управления 10, 10’ могут быть неактивными с фиксированными передними колесами, и транспортное средство может управляться одним задним колесом, т.е. выдвигать или вытягивать шток из цилиндра 40 для поворота заднего колеса 38, вокруг его вертикальной оси.
На Фиг. 8 показано транспортное средство в режиме движения в сторону. Заднее колесо 38 было повернуто на 90° для выравнивания перпендикулярно ведущей оси транспортного средства таким образом, что транспортное средство может двигаться в сторону и управляться с помощью передних колес 12, 12’. В этом режиме, заднее колесо 38 зафиксировано в своем положении и движется по дуге, направление кривизны и радиус которой определяются углом передних колес 12, 12’.
Как показано на Фиг. 8 соответствующие цилиндры систем рулевого управления 10, 10’ каждого переднего колеса синхронизированы так, что угол, принимаемый левым передним колесом 12, отображается колесом 12’ в противоположном направлении. Таким образом, две системы рулевого управления для колеса транспортного средства образуют вместе часть общей системы рулевого управления транспортного средства, которая показана на Фиг. 9 и 10.
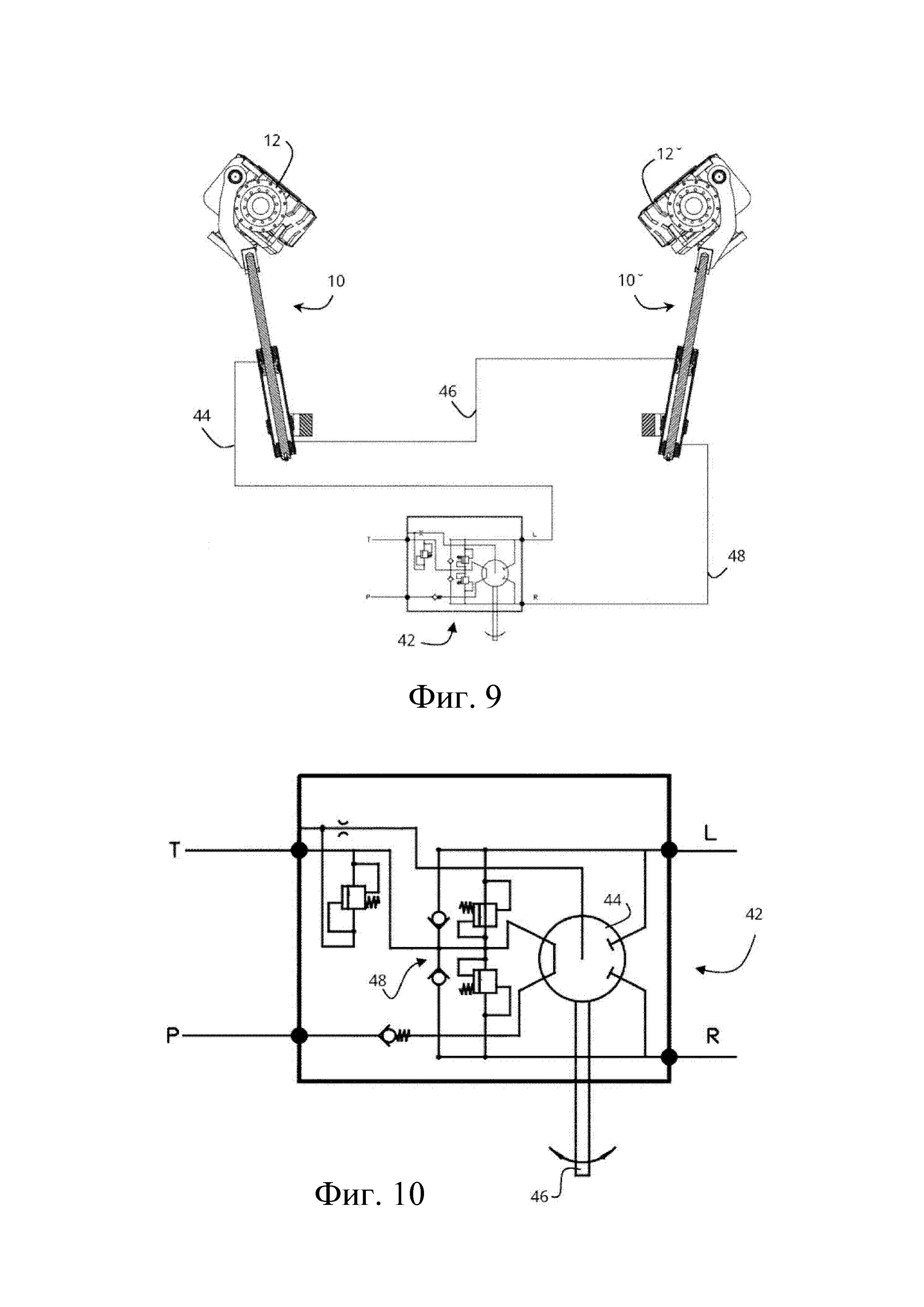
На Фиг. 9 можно увидеть, что цилиндр левой системы 10 соединен с цилиндром правой системы 10’ с помощью гидравлического контура, который содержит схему управления 42, левый напорный трубопровод 44, ведущий к/из порта L схемы управления, трубопровод совместного использования 46 и правый напорный трубопровод 48, ведущий к/из порта R. Каждый цилиндр имеет переднюю камеру (с соединительным штоком 22, см. Фиг. 1-6) и заднюю камеру (с пассивным штоком 24), причем камеры заполнены гидравлической жидкостью и отделены поршнем, на котором установлены штоки.
Передняя камера системы 10 соединена с левым напорным трубопроводом 44. Задняя камера системы 10 соединена с передней камерой системы 10’ трубопроводом совместного использования 46. Задняя камера системы 10’ соединена с правым напорным трубопроводом 48. Объемы цилиндров равны и система сбалансирована так, как показано на Фиг. 9, где оба поршня занимают одинаковое положение вдоль своих соответствующих цилиндров.
Схема управления 42 показана более подробно со ссылкой дополнительно на Фиг. 10. Схема управления имеет порты Р и Т, соответственно соединяющиеся с гидравлическим насосом и резервуаром. Роторный насос 44 управляется валом 46 рулевой колонки так, что вращение рулевой колонки в одном направлении вызывает перекачивание гидравлической жидкости через порт L в трубопровод 44 (и соответствующий объем жидкости возвращается через порт R), в то время как вращение колонки в другом направлении вызывает обратный поток. Система односторонних клапанов и электромагнитных клапанов 48 регулирует возникающий поток гидравлической жидкости в контуре.
Когда левый трубопровод 44 находится под давлением, поршень системы 10 приводится в движение назад, втягивая соединительный шток 22 системы 10 в цилиндр. Это одновременно создает давление на заднюю камеру 10 и жидкость течет через трубопровод совместного использования 46 в переднюю камеру системы 10’, перемещая в той же степени поршень этой системы назад. Образование давления в правом трубопроводе 48 имеет противоположный эффект, при этом потоки жидкости меняются, а поршни в каждом случае двигаются вперед.
Общая система рулевого управления для передних колес транспортного средства с каждой стороны имеет те же преимущества, что и система рулевого управления с одним колесом на Фиг. 1-6, обеспечивая точное рулевое управление более, чем на 90 градусов без воздействия поперечных усилий на уплотнения гидравлических цилиндров.
Изобретение не ограничивается описанными в настоящем документе вариантами осуществления, которые могут изменяться в пределах объема следующей формулы изобретения.
Реферат
Группа изобретений относится к системе рулевого управления 10 для колеса транспортного средства 12, системе рулевого управления транспортным средством и транспортному средству. Система рулевого управления для колеса содержит кронштейн 14 колеса для установки управляемого колеса 12, причем кронштейн 14 колеса установлен с возможностью вращения относительно транспортного средства вокруг оси поворота, что позволяет управлять колесом 12. Гидравлический цилиндр 20 содержит поршень и узел жесткого соединительного штока 22, выходящий из поршня цилиндра 20. Узел 22 жесткого соединительного штока содержит первую секцию 22, выполненную с возможностью возвратно-поступательного перемещения в цилиндр 20 и из него, и вторую секцию 26, которая жестко проходит от первой секции 22 к соединению 50 точки поворота, где она соединена с возможностью поворота с кронштейном 14 колеса со смещением относительно оси поворота. Гидравлический цилиндр 20 установлен с возможностью поворота на транспортном средстве таким образом, что он не может поступательно перемещаться относительно транспортного средства, но может изменять свое положение относительно транспортного средства. Благодаря узлу 22 жесткого соединительного штока и шарнирному соединению с кронштейном колеса 14, а также цилиндру 20, установленному с возможностью поворота на транспортном средстве, предотвращаются поперечные деформации на уплотнениях гидравлического цилиндра 20. 12. Система рулевого управления содержит: первую систему рулевого управления для первого колеса и вторую систему рулевого управления для второго колеса транспортного средства и гидравлический контур, последовательно соединяющий гидравлический цилиндры первой и второй систем рулевого управления. Обеспечивается повышение надежности, снижение стоимости при изготовлении и замене. 3 н. и 10 з.п. ф-лы, 10 ил.

Комментарии