Транспортное средство для любой местности, управляемое посредством заноса - RU2499716C2
Код документа: RU2499716C2
Чертежи





Описание
Область техники
Настоящее изобретение относится к управляемо скользящим при повороте транспортным средствам (вездеходам, ВХ), включающим рулевой механизм, в соответствии с чем вездеход имеет управляемые торможением колеса или гусеничный ход, и рулевой механизм, оборудованный дифференциальной коробкой передач.
Предпосылки создания изобретения
Вездеходы существовали в различных компоновках и с различными системами привода и рулевого управления. Существовали в основном два способа того, как управление направлением движения может быть осуществлено на таких транспортных средствах.
В первой и наиболее распространенной категории таких транспортных средств, транспортное средство управлялось при помощи, по крайней мере, двух колес, которые являются поворотными горизонтально вокруг вертикальной опорной точки. Эти колеса были связаны механически посредством стержня или зубчатыми сцеплениями с рулевым колесом или рулем. Водитель поворачивает руль или рулевое колесо, чтобы повернуть колеса и управлять транспортным средством. Управление направлением движения может быть осуществлено с применением гидравлики или электрики, чтобы уменьшить рулевое усилие, прикладываемого водителем.
Во второй категории таких вездеходов, транспортные средства управляемо скользят при повороте и не имеют горизонтально поворачивающихся колес. Все колеса установлены неподвижно в направлении движения транспортного средства и жестко связаны с системой подвески или непосредственно с кузовом транспортного средства. Это относится к колесным механическим транспортным средствам, либо с 4, 6 или 8 колесами, как на Фиг.2, или применимо для транспортных средств с гусеничным ходом вместо колес. Настоящее изобретение относится к этой второй категории. Такие скользящие при повороте управляемые вездеходы известны у разных производителей в разных классах транспортных средств, начиная с очень тяжелых боевых танков и заканчивая легковыми автомобилями с массой около 1 т максимально, включая коммерческие снегоуборочные транспортные средства и транспортные средства, используемые в строительстве и им подобные.
Настоящее изобретение относится к группе всех возможных скользящих при повороте управляемых транспортных средств, таких как гусеничный вездеход, описанный в патенте США №7131507 того же заявителя или легковесные малые транспортные средства с четырьмя, шестью или восемью колесами, которые присутствуют на рынке. Вес без груза этих транспортных средств составляет приблизительно около тонны.
Один из недостатков вездеходов, являющихся легковесными вездеходами, известными из уровня техники, в дальнейшем называемые МВХ, касается рулевого механизма, в частности, если плавное управление и полная безопасность требовались на более высоких скоростях транспортного средства и особенно, при различном или изменяющемся состоянии грунта.
Эти легкие и относительно небольшие МВХ, как правило, управляются таким образом, что система привода состоит из правых колес или гусениц и из левых колес или гусениц, и так, что если поворотный рулевой механизм был приложен, левые или правые колесные группы (или гусеничные механизмы) отключаются от привода передачи движения с некоторым сцеплением, и тормозное усилие применяется к той же группе колес или гусениц, чтобы замедлить скорость и, в результате разницы скоростей колесных групп или гусеничных механизмов транспортного средства осуществляется поворот транспортного средства.
Недостатком таких систем является то, что торможение, которое необходимо, чтобы управлять транспортным средством во время поворота, уничтожает крутящий момент на одной стороне транспортного средства, например, с внутренней стороны транспортного средства, тогда как на другой стороне транспортного средства, с внешней стороны, больше крутящий момент и скорость гусениц, необходимые для поддержания постоянной скорости транспортного средства. Эта система не является эффективной и не позволяет управлять транспортным средством гладко и безопасно на высоких скоростях, особенно если при движении состояние грунта меняется от жесткого до мягкого, например, от асфальта до снега или грязи, во время вождения при развороте, где эти транспортные средства становятся неуправляемыми, поскольку водитель должен рассчитать применение тормозных сил при таких изменениях условий для компенсации повышенного или пониженного сцепления и сопротивления гусениц или колесных групп, которое практически не контролируется из-за очень короткого времени, отводимого на реакцию.
Для устранения вышеупомянутых недостатков, как известно, был использован дифференциальный рулевой механизм. Существуют очень тяжелые и очень сложные дифференциальные системы рулевого управления для танков и большегрузных транспортных средств, но они не могут быть использованы для сверхлегких и малых транспортных средств из-за сложности, веса, размера и стоимости, как в следующих примерах:
Патент США №6135220 раскрывает гусеничные транспортные средства и приводит модульные системы для поддержки механизма привода. Эта система состоит из двух приводных агрегатов, включающих дифференциал и рулевой механизм, использующий дополнительный дифференциал.
Патент США №4434680 раскрывает дифференциальный рулевой механизм сельскохозяйственного трактора, но этот дифференциальный рулевой механизм не применяется для быстрого перемещения МВХ и слишком сложен для легких и малобюджетных транспортных средств.
WO 97/02975 раскрывает дифференциальную систему управления с двумя дифференциалами и дифференциальным рулевым механизмом.
Сущность изобретения.
Именно в свете вышеупомянутых технических решений задачей настоящего изобретения является обеспечение эффективного, но все же простого и легкого в производстве дифференциального рулевого механизма для скользящих на повороте управляемых МВХ, что позволяет управлять и направлять контролируемым образом движение транспортного средства на более высоких скоростях с высокой безопасностью и гладкостью, даже если состояние земной поверхности резко меняется во время вождения при быстром развороте.
Эта задача решается дифференциальным рулевым устройством, отличающимся тем, что вездеход является легким вездеходом (ЛВХ), в котором дифференциальное рулевое устройство предназначено для получения определенного дифференциала скорости двух приводных агрегатов транспортных средств, связанных с углом поворота рулевого устройства, независимо от состояния поверхности, по которой движется транспортное средство, в котором дополнительные рулевой привод действует на солнечную шестерню дифференциала.
В соответствии с объемом притязаний управляемо скользящее при поворотах транспортное средство (вездеход), включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства и дифференциальное рулевое устройство с солнечной шестерней дифференциала, при этом транспортное средство является легким вездеходом (ЛВХ), в котором дифференциальное рулевое устройство предназначено для получения определенной дифференциальной скорости двух приводных агрегатов транспортного средства, связанной с углом поворота рулевого устройства, независимо от состояния поверхности, по которой движется транспортное средство, при этом дополнительный рулевой привод действует на солнечную шестерню дифференциала, где сухой вес ЛВХ составляет менее одной тонны, его длина меньше приблизительно 3,5 м, а ширина менее приблизительно 1,65 м.
В частности, при этом дифференциальное рулевое устройство приводит к появлению дифференциальной скорости двух приводных агрегатов, которая зависит от усилия, прилагаемого к рулевому устройству, возможно, таким образом, что при повороте транспортного средства его радиус при низкой скорости транспортного средства меньше, чем при высокой, при наличии того же усилия, прилагаемого к рулевому устройству.
При этом двигатель и коробка передач могут быть продольно установлены рядом в передней части транспортного средства, а постоянный регулируемый привод установлен в передней части данной конструкции.
Дифференциальное рулевое устройство при этом может быть установлено в задней части транспортного средства в одну линию с приводами из двух приводных агрегатов.
Дифференциальное рулевое устройство может включать передачу, состоящую из мотора рулевого управления, действующего на нулевом валу, связанном с носителем для работы с солнечными колесами, которые, в свою очередь соединены с мотором двигателя, посредством чего солнечные передача действует с кольцевой передачей, подключенной к соединительным фланцам приводов.
Нулевой вал может быть подключен непосредственно к одному носителю для солнечных колес и к другим носителям для солнечных колес через промежуточный вал для изменения направления.
Движущей машиной в данном транспортном средстве может являться двигатель внутреннего сгорания или электромотор.
В данном транспортном средстве мотор рулевого управления может быть гидравлическим мотором или электрическим мотором.
Транспортное средство (вездеход), управляемое рулем при заносе, может включать в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства и устройство гидропривода руля, содержащее гидравлический насос и мотор гидропривода руля, причем транспортное средство является легким вездеходом (ЛВХ), в котором гидравлический контур включает клапан управления приоритетом потока, управляющий клапаном рулевого управления, соединенным с мотором гидропривода руля, и гидравлический контур дополнительно содержит предохранительный клапан.
В этом случае может составлять менее одной тонны, его длина меньше приблизительно 3,5 м, а ширина менее приблизительно 1,65 м.
При этом клапан управления приоритетом потока работает как клапан управления перепадом давления и контролирует количество масла, протекающего к мотору гидропривода руля независимо от давления в гидросистеме.
В этом случае гидравлический клапан можно использовать для изменения направления гидравлического потока масла в зависимости от того, обратная или прямая передача движения включена.
В этом случае гидравлический насос для руля и для вспомогательного привода могут быть установлены на корпусе двигателя и приводятся в работу непосредственно от коленчатого вала двигателя внутреннего сгорания.
В этом случае также контур может дополнительно содержать вспомогательную рабочую гидравлическую систему, и гидравлическая система рулевого двигателя разработана таким образом, что она всегда имеет приоритет над вспомогательной рабочей гидравлической системой.
В этом случае также мотор гидропривода руля может действовать на солнечную шестерню дифференциала по п.2.
Транспортное средство (вездеход), управляемое рулем при заносе, в одном из вариантов включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства, при этом вездеход является легким вездеходом (ЛВХ), включающим в себя устройство для контроля крутящего момента двигателя с электронной системой управления дроссельной заслонкой, связанной с двигателем и выступающей частью рычага дроссельной заслонки или педалью, где электронная система управления дроссельной заслонкой компенсирует крутящий момент, необходимый для приведения рулевого усилия в соответствие с показаниями датчика давления рулевого управления, управляющего электронной дроссельной заслонкой и тем самым компенсирующего крутящий момент двигателя.
В этом случае электронная система управления дроссельной заслонкой может быть предназначена для компенсации крутящего момента, необходимого для рулевого усилия для обеспечения того, чтобы двигатель держал свой диапазон числа оборотов в минуту стабильным во время управления без воздействия водителем на устройство управления дросселем или на педаль.
В этом случае электронная система управления дроссельной заслонкой может быть предназначена для управления максимальной скоростью транспортного средства по-разному в зависимости от коробки передач без ограничения числа оборотов двигателя.
В этом случае электронная система управления дроссельной заслонкой может быть предназначена для учебного режима, и скорость транспортного средства может быть скорректирована в зависимости от навыков водителя.
В этом случае сухой вес может составлять менее одной тонны, его длина меньше приблизительно 3,5 м, а ширина менее примерно 1,65 м.
Дифференциальное рулевое устройство, гидравлические устройства рулевого управления и устройства компенсации крутящего момента могут быть выполнены так, что позволяют вездеходу повернуться на месте и двигаться по кривой предельно малого радиуса.
В следующем варианте выполнения управляемо скользящее при поворотах транспортное средство (вездеход), включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства и дифференциальное рулевое устройство с солнечной шестерней дифференциала, при этом транспортное средство является легким вездеходом (ЛВХ), в котором дифференциальное рулевое устройство предназначено для получения определенной дифференциальной скорости двух приводных агрегатов транспортного средства, связанной с углом поворота рулевого устройства, независимо от состояния поверхности, по которой движется транспортное средство, при этом дополнительный рулевой привод действует на солнечную шестерню дифференциала, и дифференциальное рулевое устройство включает передачу, состоящую из мотора рулевого управления, действующего на нулевом валу, связанном с носителем для работы с солнечными колесами, которые, в свою очередь соединены с мотором двигателя, посредством чего солнечные передача действует с кольцевой передачей, подключенной к соединительным фланцам приводов.
При этом нулевой вал может быть подключен непосредственно к одному носителю для солнечных колес и к другим носителям для солнечных колес через промежуточный вал для изменения направления.
В другом варианте выполнения транспортное средство (вездеход), управляемое рулем при заносе, включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства, и устройство гидропривода руля, содержащее гидравлический насос и мотор гидропривода руля, причем вездеход (ВХ) является легким вездеходом (ЛВХ), в котором гидравлический контур включает клапан управления приоритетом потока, управляющий клапаном рулевого управления, соединенным с мотором гидропривода руля, при этом сухой вес ЛВХ составляет менее одной тонны, его длина меньше приблизительно 3,5 м, а ширина менее приблизительно 1,65 м.
В следующем варианте выполнения транспортное средство (вездеход), управляемое рулем при заносе, включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства, и устройство гидропривода руля, содержащее гидравлический насос и мотор гидропривода руля, причем вездеход (ВХ) является легким вездеходом (ЛВХ), в котором гидравлический контур включает клапан управления приоритетом потока, управляющий клапаном рулевого управления, соединенным с мотором гидропривода руля, при этом контур дополнительно содержит вспомогательную рабочую гидравлическую систему, и гидравлическая система рулевого двигателя разработана таким образом, что она всегда имеет приоритет над вспомогательной рабочей гидравлической системой.
В следующем варианте выполнения транспортное средство (вездеход), управляемое рулем при заносе, включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства, при этом транспортное средство является легким вездеходом (ЛВХ), включающим в себя устройство для контроля крутящего момента двигателя с электронной системой управления дроссельной заслонкой, связанной с двигателем и выступающей частью рычага дроссельной заслонки или педалью, при этом электронная система управления дроссельной заслонкой предназначена для компенсации крутящего момента, необходимого для рулевого усилия для обеспечения того, чтобы двигатель держал свой диапазон числа оборотов в минуту стабильным во время управления без воздействия водителем на устройство управления дросселем или на педаль.
В следующем варианте выполнения транспортное средство (вездеход), управляемое рулем при заносе, включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства, при этом транспортное средство является легким вездеходом (ЛВХ), включающим в себя устройство для контроля крутящего момента двигателя с электронной системой управления дроссельной заслонкой, связанной с двигателем и выступающей частью рычага дроссельной заслонки или педалью, при этом электронная система управления дроссельной заслонкой предназначена для управления максимальной скоростью транспортного средства по-разному в зависимости от коробки передач без ограничения числа оборотов двигателя.
В следующем варианте выполнения транспортное средство (вездеход), управляемое рулем при заносе, включает в себя два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства, при этом транспортное средство является легким вездеходом (ЛВХ), включающим в себя устройство для контроля крутящего момента двигателя с электронной системой управления дроссельной заслонкой, связанной с двигателем и выступающей частью рычага дроссельной заслонки или педалью, при этом сухой вес ЛВХ составляет менее одной тонны, его длина меньше приблизительно 3,5 м, а ширина менее приблизительно 1,65 м.
Краткое описание чертежей
Дополнительные характеристики и преимущества станут понятны из подробного описания, которое следует со ссылкой на чертежи.
На Фиг.1 показан упрощенный перспективный вид гусеничного вездехода, известного из уровня техники.
На Фиг.2 показан упрощенный вид сбоку колесного МВХ, известного из уровня техники.
На Фиг.2а показан вид сверху легковесного вездехода, изображенного на Фиг.2.
На Фиг.3 показан упрощенный вид сверху рулевого механизма транспортного средства в соответствии с изобретением.
На Фиг.4 схематически показано дифференциальное рулевое устройство в соответствии с изобретением.
На Фиг.5 показан гидравлический блок рулевого механизма в соответствии с изобретением.
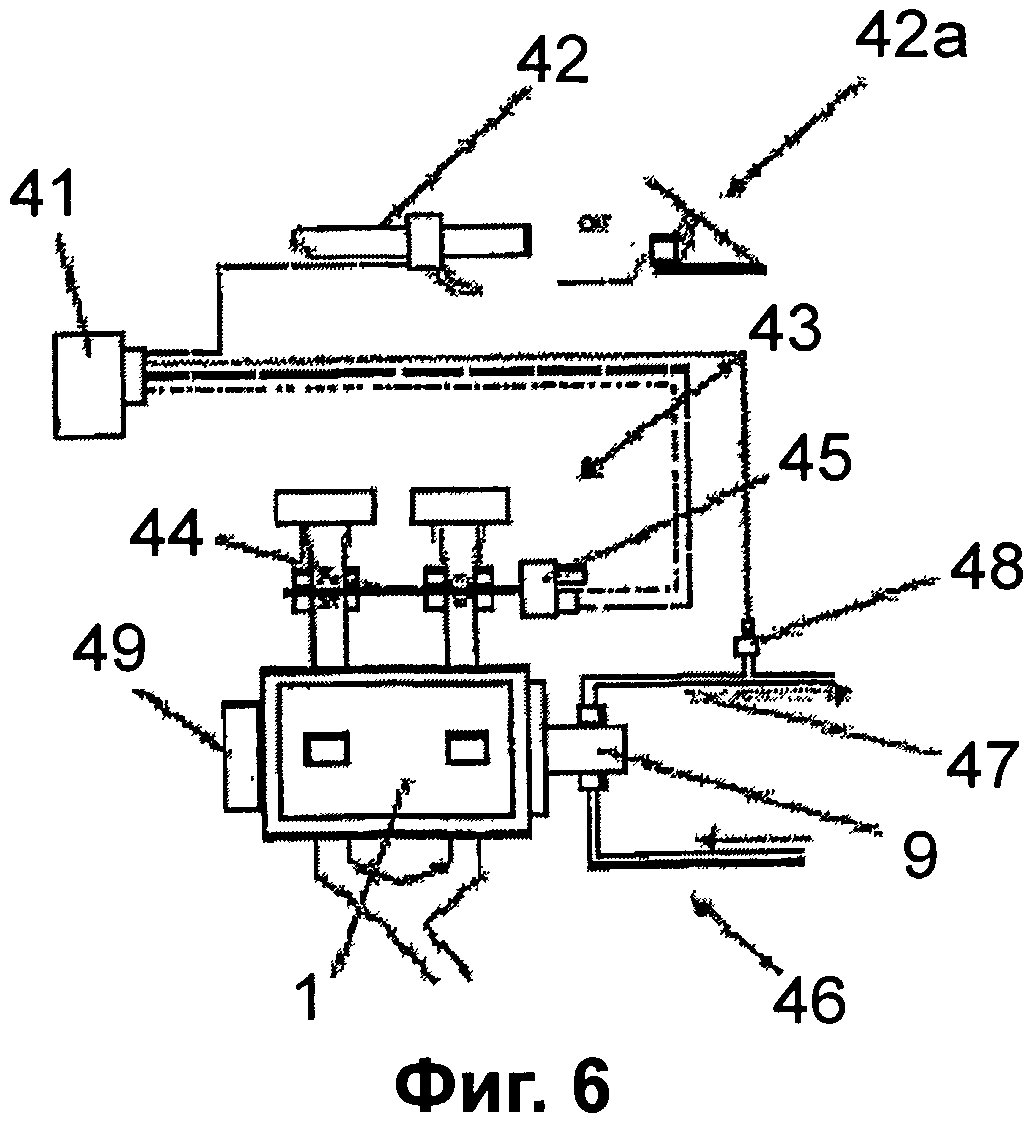
На Фиг.6 показана упрощенная схема электронного дросселя.
Подробное описание изобретения
Как будет подробно описано ниже, новая системы дифференциального рулевого управления, которая в принципе может быть использована на любом управляемо скользящем на поворотах колесном или гусеничном транспортном средстве, позволяет безопасно управлять транспортным средством даже на высоких скоростях, до более чем 60 миль/час (примерно 100 км/час), и держит транспортное средство на ходу, даже если при вождении поверхность грунта резко меняется от асфальта до снега или грязи, во время вождения при развороте.
База новой системы работает таким образом, что движущую силу создает двигатель внутреннего сгорания, который подключен к валу через коробку передач или непосредственно к корпусу дифференциала рулевого механизма. Точная конфигурация приводящего в движение и рулевого блоков не имеет значения, и согласно тому, как это было спроектировано, может быть, например, электрической, гидравлической, механической или их комбинацией.
Если транспортное средство движется прямо вперед, питание подается на обе колесные группы или гусеницы на каждую сторону правого и левого привода транспортного средства, оба привода вращаются с совершенно одинаковой скоростью, независимо от необходимого крутящего момента каждой из сторон, зависящего от поверхности движения. Например, если транспортное средство движется по снегу или грязи, т.е. мягкой и скользкой поверхности, с одной стороны и по бетону или асфальту, т.е. твердой поверхности, с другой стороны.
Если транспортное средство управляется с одной стороны, система рулевого управления в картере рулевого механизма применяет дифференциал скорости к скоростям движения каждого привода, инициируемым гидравлической системой и солнечными шестернями дифференциала. Скорости правого и левого привода отличаются в зависимости от желаемого углового радиуса движения транспортного средства.
Дифференциал скорости двух приводов достигается путем контролируемого изменения передаточного соотношения между двумя приводами, а не путем применения любого управляемого торможения и, следовательно, без уничтожения движущей силы. Весь крутящий момент, подаваемый на привод системы, не меняется в процессе управления; меняется только распределение крутящего момента. Крутящий момент, снижаемый на одной стороне, является добавленным к другой стороне. В результате транспортное средство сохраняет постоянную скорость движения во время управления без подачи дополнительной мощности на приводы для компенсации потерь управления на торможение.
Электронная система управления дроссельной заслонкой, которая будет объяснена ниже, только компенсирует дополнительные мощности, необходимые для гидравлической системы, чтобы инициировать усилие, прилагаемое к рулевому управлению. Эта система позволяет контролировать управляемость транспортного средства на гладкой и легкой для прохождения поверхности, а также в состоянии контролировать ограничение скорости транспортного средства как для различных режимов вождения, т.е. режим учащегося, так и просто для обеспечения безопасности во время вождения транспортного средства плавно задним ходом, имея возможность контролировать ограничение скорости транспортного средства с помощью электронного дросселя вместо любого жесткого силового ограничителя заднего хода. Эта же функция может быть применена к другим этапам передач, т.е. для защиты двигателя от достижения высоких оборотов при низких передаточных отношениях.
Усилие, прилагаемое к рулевому устройству, осуществляется в данном случае рулем мотоциклетного типа, но может быть осуществлено с помощью рулевого колеса, или даже сервоприводом для дистанционного управления транспортным средством. Угол поворота этого устройства определяет дифференциал скоростей двух приводов транспортного средства и, следовательно, радиус поворота транспортного средства в зависимости от скорости транспортного средства, и это вне зависимости от различных условий сцепления на двух приводах.
Из-за схемы размещения рулевой системы, результат поворота зависит от скорости транспортного средства, пропорционально уменьшающей радиус поворота таким образом, что при снижении скорости движения достигается перевод рулевого устройства на более высокий коэффициент дифференциала скорости приводов, и, следовательно, к меньшему радиусу поворота транспортного средства.
При увеличении скорости движения транспортного средства тот же перевод рулевого устройства на более низкое отношение дифференциала скорости приводов вызывает, следовательно, больший радиус поворота. Этот дегрессивный характер изменения обеспечивает высокую маневренность транспортного средства на низких скоростях, но дает гладкую и безопасную реакцию на высоких скоростях. Такие функциональные возможности также известны в автомобильной промышленности, где также вызывают большой интерес.
Если во время поворота, поверхность земли меняется, система компенсирует крутящий момент, необходимый на каждой стороне, и поддерживает то же соотношение дифференциала скорости, которое задано поворотом рулевого устройства. Такое поведение системы рулевого управления является наиболее выгодным и помогает управлять транспортным средством безопасно и точно также на более высоких скоростях транспортного средства и на различных или изменяющихся условиях земной поверхности.
На Фиг.1 показан упрощенный перспективный вид гусеничного вездехода, известного из уровня техники, где два гусеничных механизма 50 поддерживаются посредством натяжных колес 51, которые смонтированы на рычагах подвески. Сиденье седельного типа 53 может разместить одного или двух человек, один за другим. Механизмом управления транспортным средством является руль мотоциклетного типа 52.
На Фиг.2 показан упрощенный перспективный вид колесного вездехода, известного из уровня техники, где колеса 55 установлены обычно непосредственно на кузове транспортного средства 54. Сиденья 56 также предполагают размещение двух человек, но бок о бок, водитель транспортного средства осуществляет управление через рулевые рычаги 57, потянув один рычаг назад для поворота транспортного средства в соответствующую сторону.
На Фиг.3 показан упрощенный вид сверху транспортного средства в соответствии с изобретением, в котором двигатель 1, являющийся в данном случае бензиновым двигателем внутреннего сгорания, обеспечивает движущую силу через регулируемый привод 2 и переключения коробки передач 3 для выбора позиции движения: быстро вперед, пониженной передачи, нейтральной, заднего хода и стоянки. Двигатель может быть также дизельным или использовать любой другой вида топлива. В настоящем варианте воплощения коробка передач является коробкой с ручным переключением передач, которая также может быть автоматической коробкой передач, или применять любой другой вид сцепления и передачи, в том числе с гидростатическим приводом. Коробка передач 3 связана соединительной тягой с валом привода колес 4, который переносит движущую силу на дифференциальную коробку передач 5 в задней части транспортного средства. Выход дифференциальной коробки передач связан с валом главной передачи 6 и тормозами 7 с обеих сторон и обеспечивает движущей силой гусеницы 51 на каждой стороне транспортного средства. Двигатель также приводит в движение гидравлический насос 9, который снабжает гидравлический привод руля 8 в случае поворота руля водителем в соответствии с функциональным описанием на Фиг.5. Данная схема размещения компонентов является примером того, как система может быть выполнена в соответствии с патентом США 7131507 на того же заявителя. В этом контексте, точная схема расположения не важна, двигатель, а также рулевой механизм могут быть организованы по-разному, в результате чего получая те же функциональные возможности системы.
На Фиг.4 схематически показано дифференциальное рулевое устройство в соответствии с изобретением, в котором движущая сила от двигателя идет на муфту 11 и входной вал 10 до углового редуктора и редуктора с зубчатыми передачами 15. Привод редуктора с зубчатыми передачами 15 жестко связан с входным валом 16 солнечных шестерней с обеих сторон и обеспечивает мощность на входную солнечную шестерню 19 дифференциальной коробки скоростей 14, которые являются в этом случае планетарными блоками. Солнечные шестерни также могут быть выполнены как блок углового редуктора или любой другой вид конструкции коробки передач. В данном случае вход осуществляется на солнечную шестерню 19 из планетарного блока, но также может быть осуществлен на любой шестерне планетарной передачи или зубчатого венца в любой конфигурации ввода/вывода, имеющие передаточное отношение, подобранные в зависимости от системы. В настоящем варианте воплощения, движущая сила направлена от ведомой шестерни 12 к выходному валу 20 и фланцевому соединению 13. Усилие, прилагаемое к рулевому управлению, направлено от гидравлического привода руля 8 по шестерням и валам 23, 24, 25, 22, к стойке шестерни планетарной передачи 21 и шестерням планетарной передачи. Во время вождения транспортного средства или в прямом направлении, или задним ходом, без рулевого усилия, все эти компоненты стоят на месте, что приводит к фиксированным отношениям солнечных шестерен, с той же выходной скоростью с обеих сторон. Поэтому обе гусеницы 51 жестко связаны для обеспечения максимальной тяги.
Когда рулевое усилие применяется водителем, солнечные шестерни оказываются исключенными из системы рулевого управления, как например, подробно описано ниже на Фиг.5. В зависимости от величины рулевого усилия, мотор гидропривода руля 8 двигается быстрее или медленнее, в одну или другую сторону относительно требуемого направления вращения, и приводит в движение стойку шестерни планетарной передачи 21 через шестерни и валы 23, 24, 22, 25. Стойка шестерни планетарной передачи 21 приводит в движение шестерню планетарной передачи 17 через вал 18, который изменяет (передаточное число) планетарного блока между солнечной шестерней 19 и ведомой шестерней 12 и создает дифференциальные скорости двух выходных валов 20, Для поддержания постоянной скорости движения транспортного средства, внешний выходной вал 20 и привод должны вращаться быстрее, чем при нейтральной скорости транспортного средства, другая сторона выходного вала на ту же величину медленнее, что достигается путем изменения на обратное направления вращения стойки шестерни планетарной передачи одной стороны промежуточного вала 25, чтобы изменить отношения планетарного блока либо в положительную, либо в отрицательную сторону.
В рамках этой системы, результатом приведения в действие мотора гидропривода руля 8 являются две противоположных вращающихся планетарных стойки передней подвески и, следовательно, в нижней передаточное число выходных валов 20 и главной передачи 13 соответственно выше по отношению к скорости вращения входного вала 10. Большим преимуществом этой системы также является то, что диапазон входной скорости движения механизма поворота планетарной стойки 21, перекрывается диапазоном входной скорости солнечной шестерни входного вала 16, что приводит к зависимости дифференциальной скорости главной передачи 13 от скорости транспортного средства. Как результат, радиус поворота становится шире с увеличением скорости транспортного средства при повороте при том же усилии, прилагаемом к рулевому управлению от руля 52. Это дегресивное поведение руля является наиболее выгодным и позволяет не только контролировать безопасность транспортного средства на высокой скорости, но и позволяет лучше всего маневрировать на малых скоростях транспортного средства.
Другим большим преимуществом этой системы является то, что обе главные передачи 13 всегда являются связанными друг с другом этим переменным отношения, гарантируя, что транспортное средство движется безопасно и беспрепятственно в любых условиях поверхности вождения и сопротивления вождения, без какого-либо влияния того, насколько велик крутящий момент, полученный от водителя.
Отсюда следует, что входной ведущий вал 10 жестко связан через вал 16 с двумя солнечными шестернями дифференциалов, любого вида, по одной с каждой стороны. Выходы этих солнечных шестерней дифференциалов жестко связаны с каждой стороны с ведущим валом 6 колес или гусениц.
Если транспортное средство двигается прямо без каких-либо рулевых усилий, дополнительный мотор гидропривода руля 8, оси и шестерни 2, 4, останавливаются, и оба ведомых колеса и гусеницы вследствие этого являются жестко соединенными друг с другом и с входным ведущим валом 6. В этом случае, трансмиссия является чисто механической без каких-либо дополнительных потерь.
Если рулевое усилие применяется к мотору гидропривода руля 8, мотор начинает вращаться в одном направлении в зависимости от поворота руля, направо или налево. Диапазон числа оборотов в минуту этого мотора зависит от угла поворота рулевого колеса.
При зацеплении вала и шестерни 2, это также может быть, например, ременной привод, солнечные шестерни дифференциалов начинают вращаться, что приводит к дифференциальной скорости выходных валов 20 с обеих сторон. В связи с тем, что одно колесо или гусеница должны вращаться быстрее, чем другие, или, как при повороте на месте в случае стоянки, когда один вал двигается вперед, а другой назад, система шестерней при механизме поворота вынуждает оси и шестерни 4 изменять направление вращения одного стороны привода дифференциальной коробки скоростей.
На Фиг.5 показана система гидропривода руля в соответствии с изобретением, в при которой двигатель внутреннего сгорания 1 приводит в действие гидравлический насос 9 через боковой привод, чтобы производить гидравлическое давления, необходимое для рулевого управления. В настоящем воплощении, двигатель внутреннего сгорания 1 также вызывает движение транспортного средства, которое, однако, не важно для функциональности данной системы. В другом воплощении, гидравлический насос 9 также может быть приведен в действие отдельным электромотором. Клапан 27 контролирует рабочее давление и ограничивает максимальное давления в системе в целях безопасности.
Приоритетный клапан контроля расхода 28 контролирует расход через клапан рулевого управления 29 для того, чтобы снижение давления за клапаном рулевого управления использовать для регулировки давления в системе управления. Приоритетный клапан контроля расхода 28 работает в этой компоновке в качестве баланса давления и выполняет функцию трехстороннего клапана контроля потока. Вследствие этого увеличивается или уменьшается поток через клапан рулевого управления 29 притом, что разница давлений в системе управления остается постоянной все время. Регулировка давления в системе управления достигается переключением клапана 30 на положение одного или другого направления потока в гидравлической системе. В настоящем варианте воплощения системы, этот клапан составляет единое целое с клапаном рулевого управления 29.
Клапан рулевого управления 29 работает, с одной стороны, подобно регулируемому дросселю, а с другой стороны контролирует направление потока по ту сторону мотора гидропривода руля 8 для обеспечения движения вперед или задним ходом в зависимости от рулевого усилия, совершаемого водителем, чтобы повернуть транспортное средство в одну или другую сторону.
При этой схеме размещения результат заключается в постоянной зависимости между расходом потока и открытой площади поперечного сечения, и, следовательно, в соответствующем диапазоне числа об/мин мотора гидропривода руля 8, независимо от текущего давления в системе и объема потока, поступающего из гидравлического насоса 9.
То количество масла, которое не используется рулевым управлением для передачи усилия водителя рулевому управлению, может быть использовано для любых рабочих гидроагрегатов 31 или будет возвращено через обратную магистраль 39 с теплообменником 35 и фильтром 36 обратно в масляный бак 37. Масляный бак имеет отверстия в крышке 28, чтобы препятствовать недостаточному/избыточному давлению в баке.
Рулевой механизм остается постоянно работающим, независимо от давления, используемого для функционирования гидроагрегата, которое контролируется расходным клапаном 32 и клапаном управления давлением в системе 27. Если расхода, доступного в зависимости от диапазона числа об/мин двигателя внутреннего сгорания 1 и насоса 9, не хватает для удовлетворения требований рулевого механизма, рулевой механизм всегда имеет приоритет, вследствие принципа действия приоритетного клапана 28. В таком случае, работающая гидравлическая система просто получает масло, которое не является необходимым для рулевого управления.
Для получения водителем ответной реакции на рулевое усилие от руля мотоциклетного типа или любого другого типа рулевого устройства, дополнительный гидравлический цилиндр 33 может быть добавлен в питающую линию мотора гидропривода руля 8. Эта ответная реакция является взаимосвязанной с давлением, необходимым в системе рулевого управления и, следовательно, показателем силы сцепления двух гусениц или колес транспортного средства.
4-2 клапан 34 используется для обратного вращения мотора гидропривода руля 8 и, таким образом, для сохранения направления поворота руля независимо от прямого движения или движения задним ходом транспортного средства. Этот клапан 34 может переключаться электрическим, гидравлическим или механическим способом, всегда по умолчанию в положение для прямого вождения по соображениям безопасности.
На Фиг.6 показана упрощенная версия электронного управления дроссельной заслонкой в соответствии с настоящим изобретением для управления крутящим моментом двигателя и достижения управляемости транспортного средства. В вездеходах, известных ранее из уровня техники, крутящий момент двигателя контролировался механическим приводом с помощью троса дроссельной заслонки, устройства ввода в виде педали газа 42А или выступающей части рычага дроссельной заслонки 42, которым открывается и закрывается дроссельная заслонка двигателя внутреннего сгорания для контроля крутящего момента при управление транспортным средством.
Устройство ввода в виде педали газа 42А или выступающая часть рычага дроссельной заслонки 42 подает электронный сигнал на блок управления дроссельной заслонки с электроприводом (ЭДЗ) 41. Это блок управления 41 может составлять единое целое с блоком управления двигателем для контроля сжигания топлива в двигателе, системы зажигания и т.д.
В связи с тем, что даже управляемые рулем скользящие при развороте транспортные средства в соответствии с настоящим изобретением используют некоторое увеличение мощности для управления транспортным средством, двигатель необходим, чтобы сообщить некоторый больший крутящий момент, чтобы гарантировать стабильное вождение без каких-либо корректив, сделанных водителем транспортного средства для обеспечения безопасности вождения.
В соответствии с настоящим изобретением, рулевой механизм приводят в действие гидравлической системой, которая контролирует дифференциал скорости гусениц или колес, чтобы направить транспортное средство в нужном направлении. Как показано для гидравлической системы, двигатель внутреннего сгорания 1 с его механизмом отбора мощности 49 приводит в действие гидравлический насос 9, где гидравлическое масло подается насосом через магистраль подвода 46 в насос, а оттуда через нагнетающую магистраль 47 до датчика давления 48. Приоритетный клапан 28 определяет давление гидравлической системы, необходимое для создания требуемого дифференциала скоростей, с учетом воздействия мотора гидропривода руля 8, см. Фиг.5.
Необходимый для рулевого управления крутящий момент является в основном зависимым от состояния поверхности, по которой движется транспортное средство. На твердых поверхностях, таких, как смола или бетон, крутящий момент больше и, поэтому необходимо более высокое давление в гидравлической системе, чтобы позволить транспортному средству управляемо (рулем) скользить в соответствии с запросом (действием) водителя. На мягкой поверхности, такой, как грязь, песок или снег, меньший крутящий момент необходим для достижения того же поворота руля и радиуса поворота транспортного средства. К тому же, передаточное число приводного механизма, установленное коробкой передач, влияет на систему таким же образом. Уменьшение передаточного числа на пониженной передаче требует меньшего крутящего момента двигателя, в то время как для управления транспортным средством на больших передачах используют большее передаточное число.
Для компенсации этого крутящего момента, гасимого двигателем, и чтобы позволить автоматизированное стабильное управление транспортным средством, датчик давления 48 измеряет создаваемое гидравлическое давление и сообщает об этом значение на блок управления дроссельной заслонки с электроприводом 41. Блок управления дроссельной заслонки с электроприводом имеет интегрированные модели и карты для расчета желаемой коррекции открытия дроссельной заслонки и отправки этой информации на привод 45 дроссельной заслонки. Этот привод дроссельной заслонки изменяет корпус дроссельной заслонки 43, открывая мост 44, чтобы открыть один или несколько дросселей. В зависимости от вариантов воплощения это может быть один или несколько дросселей для всех цилиндров или отдельные дроссели для каждого цилиндра; в настоящем варианте воплощения показаны отдельные дроссели на цилиндр, синхронизированные по величине требуемого крутящего момента, отраженные в дополнительном проценте открытии дросселя.
Величина такой компенсации рассчитывается из значения давления на входе датчика давления 48 как базовой функции в зависимости от скорости транспортного средства. Чтобы адаптироваться к различным возможным ситуациям, дополнительные функции компенсации необходимы для стабильного функционирования системы. В настоящем изобретении скорость транспортного средства, диапазон оборотов двигателя, нагрузка на двигатель, положение передачи и гидравлические температуры масла используют для расчета окончательной коррекции процента открытия дроссельной заслонки, а также крутящий момент двигателя, основанный на трехмерных карточных таблицах или двумерных таблицах, в которых также могут быть рассчитаны модели функционирования, как это часто используется в подобных системах современной автомобильной промышленности для электронных систем управления дроссельной заслонкой.
В дополнение к основной функции электронной системы управления дроссельной заслонкой в управляемых при заносе транспортных средствах - компенсации потерь рулевого управления - другие функции, такие, как оптимизация управляемости, учебный режим с понижением мощности двигателя и ограничение скорости движения транспортного средства, плавное и безопасное ограничения скорости транспортного средства в зависимости от выбранной передачи, дистанционное управление при беспилотном вождении или рычаг управления двигателем для работы с дополнительными гидравлическим оборудованием 31, показанным на Фиг.5, могут быть безопасно реализованы без дополнительного электронного оборудования.
Реферат
Изобретения относятся к области транспортного машиностроения. Транспортное средство (вездеход) по первому варианту содержит два приводных агрегата для колес или гусениц на обеих сторонах транспортного средства и дифференциальное рулевое устройство с солнечной шестерней дифференциала. Транспортное средство является легким вездеходом (ЛВХ). Вездеход содержит дополнительный рулевой привод, действующий на солнечную шестерню дифференциала. Сухой вес вездехода составляет менее одной тонны, его длина меньше 3,5 м, а ширина менее 1,65 м. Вездеход по второму варианту содержит устройство гидропривода руля, содержащее гидравлический насос и мотор гидропривода руля. В вездеходе гидравлический контур включает клапан управления приоритетом потока, управляющий клапаном рулевого управления. Клапан рулевого управления соединен с мотором гидропривода руля. Гидравлический контур дополнительно содержит предохранительный клапан. Вездеход по третьему варианту содержит устройство для контроля крутящего момента двигателя с электронной системой управления дроссельной заслонкой. Электронная система управления дроссельной заслонкой связана с двигателем и выступающей частью рычага дроссельной заслонки или педалью и компенсирует крутящий момент, необходимый для приведения рулевого усилия в соответствии с показаниями датчика давления рулевого управления. Вездеход по четвертому варианту содержит дифференциальное рулевое устройство, включающее передачу, состоящую из мотора рулевого управления, действующего на нулевом валу. Нулевой вал связан с носителем для работы с солнечными колесами, которые соединены с мотором дв
Комментарии