Устройство управления рулением транспортного средства и способ управления рулением - RU2571679C1
Код документа: RU2571679C1
Чертежи



Описание
Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к устройству управления рулением транспортного средства и способу управления рулением для поворота поворотного колеса через поворотный мотор на целевой угол поворота в ответ на операцию водителя транспортного средства с рабочим элементом руления, причем тракт передачи крутящего момента между рабочим элементом руления и поворотным колесом механически разъединен.
Уровень техники
[0002] В одной технологии, предусмотрено устройство управления рулением для поворота поворотных колес через поворотный мотор на целевой угол поворота в ответ на операцию с рабочим элементом руления (т.е. рулевым колесом), причем тракт передачи крутящего момента между рабочим элементом руления и поворотными колесами механически разъединен. Такое устройство управления рулением представляет собой устройство, конфигурирующее систему (т.е. SBW-систему), в общем, называемую "рулением по проводам" (в дальнейшем в этом документе, иногда упоминаемую как "SBW").
[0003] SBW-система включает в себя дублирующую муфту, чтобы механически соединять тракт передачи крутящего момента во время отказа системы или отключения системы.
[0004] Чтобы диагностировать состояние вышеописанной дублирующей муфты, зацепление или расцепление дублирующей муфты должно выполняться часто, но во время зацепления или расцепления дублирующей муфты формируется рабочий звук. По этой причине, например, PLT 1 предлагает технологию начала диагностики дублирующей муфты, когда определено то, что водитель транспортного средства не находится в транспортном средстве.
Список библиографических ссылок
Патентные документы
PTL 1. JP 2010-221918 A.
Сущность изобретения
Техническая задача
[0005] В технологии, описанной в PLT 1, дублирующая муфта диагностируется до того, как водитель садится в транспортное средство, запуск двигателя ожидается с расцепленной дублирующей муфтой, и SBW-управление начинается после того, как запускается двигатель. Тем не менее, когда состояние ожидания запуска двигателя продолжается в течение длительного времени после того, как водитель садится в транспортное средство, дублирующая муфта зацепляется, в некоторых случаях, для подавления потребления мощности. В этом случае, дублирующая муфта расцепляется после того, как запускается двигатель, и затем начинается SBW-управление.
[0006] В этом случае, при запуске двигателя, в то время как водитель выполняет руление рабочим элементом руления, состояние, в котором внутренние компоненты, такие как ролик, кулачок и т.п., зацеплены между собой, поддерживается в дублирующей муфте. Следовательно, расцепление дублирующей муфты становится затруднительным в некоторых случаях. Когда SBW-управление начинается в состоянии, в котором расцепление дублирующей муфты является затруднительным, управление поворотным мотором начинается в состоянии, в котором дублирующая муфта зацеплена, и состояние руления рабочего элемента руления может отличаться от намерения водителя.
Настоящее раскрытие сущности осуществлено с учетом вышеизложенных обстоятельств и имеет задачей предоставление устройства управления рулением транспортного средства и способа управления рулением, которые могут не допускать различения состояния руления рабочего элемента руления от намерения водителя при запуске двигателя.
Решение задачи
[0007] Чтобы разрешать вышеописанную проблему, согласно аспекту настоящего раскрытия сущности, дублирующая муфта устанавливается в состояние зацепления при запуске источника приведения в движение для приведения в движение ведущего колеса. Затем, когда крутящий момент руления, определенный после запуска источника приведения в движение, становится равным или меньшим предварительно заданного крутящего момента начала расцепления муфты, дублирующая муфта в состоянии зацепления переключается на состояние расцепления. В данном документе, крутящий момент руления представляет собой крутящий момент, который должен прикладываться к рулевому валу, конфигурирующему тракт передачи крутящего момента между рабочим элементом руления, управляемым водителем, и поворотными колесами.
Помимо этого, когда дублирующая муфта устанавливается в состояние зацепления, крутящий момент содействия при повороте, чтобы содействовать в повороте поворотных колес, выводится из поворотного мотора, в ответ на операцию с рабочим элементом руления. Дополнительно, когда дублирующая муфта в состоянии зацепления переключается на состояние расцепления, крутящий момент поворота в зависимости от целевого угла поворота выводится из поворотного мотора, в ответ на операцию с рабочим элементом руления.
Преимущества изобретения
[0008] Согласно аспекту настоящего раскрытия сущности, даже при запуске источника приведения в движение, в то время как водитель выполняет руление рабочим элементом руления, в то время когда крутящий момент руления, который водитель прикладывает к рулевому валу, превышает крутящий момент начала расцепления муфты, дублирующая муфта поддерживается в состоянии зацепления. Затем, крутящий момент руления, который водитель прикладывает к рулевому валу, становится равным или меньшим крутящего момента начала расцепления муфты, дублирующая муфта в состоянии зацепления переключается на состояние расцепления.
Соответственно, когда дублирующая муфта переключается на состояние расцепления, можно уменьшать воздействие, принимаемое водителем через захват рукой водителя рабочего элемента руления. Следовательно, можно не допускать различения состояния руления рабочего элемента руления от намерения водителя при запуске источника приведения в движение.
Краткое описание чертежей
[0009] Фиг. 1 является видом, иллюстрирующим схематичную конфигурацию транспортного средства, включающего в себя устройство управления рулением, в первом варианте осуществления настоящего раскрытия сущности;
Фиг. 2 является блок-схемой, иллюстрирующей подробную конфигурацию контроллера поворотного мотора;
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей процесс, посредством контроллера муфты, формирования флага управления муфтой и флага переключения управления при повороте;
Фиг. 4 является блок-схемой, иллюстрирующей подробную конфигурацию контроллера мотора для силы противодействия;
Фиг. 5 является временной диаграммой, иллюстрирующей пример операции, которая должна выполняться посредством устройства управления рулением; и
Фиг. 6 является блок-схемой, иллюстрирующей подробную конфигурацию контроллера поворотного мотора, включенного в устройство управления рулением, во втором варианте осуществления настоящего раскрытия сущности.
Описание вариантов осуществления
[0010] Ниже описываются варианты осуществления настоящего раскрытия сущности в отношении прилагаемых чертежей.
Первый вариант осуществления
Ниже описывается первый вариант осуществления (в дальнейшем в этом документе, называемый "настоящим вариантом осуществления") настоящего раскрытия сущности со ссылкой на чертежи.
Конфигурация
Фиг. 1 является видом, иллюстрирующим схематичную конфигурацию транспортного средства, включающего в себя устройство управления рулением транспортного средства (в дальнейшем в этом документе, иногда упоминаемое как "устройство управления рулением") в настоящем варианте осуществления.
Транспортное средство, включающее в себя устройство 1 управления рулением в настоящем варианте осуществления, представляет собой транспортное средство, к которому применяется SBW-система.
В SBW-системе, в данном документе, приведение в действие поворотного мотора управляется в ответ на операцию руления водителя транспортного средства с рабочим элементом руления (т.е. рулевым колесом), и поворот поворотных колес управляется таким образом, чтобы изменять направление движения транспортного средства. Приведение в действие поворотного мотора управляется в состоянии, в котором дублирующая муфта, размещенная между рабочим элементом руления и поворотными колесами, переключается на состояние расцепления, которое является нормальным состоянием, так что тракт передачи крутящего момента между рабочим элементом руления и поворотными колесами механически разъединен.
[0011] Когда анормальность, например, разъединение и т.п. возникает в SBW-системе, дублирующая муфта в состоянии расцепления переключается на состояние зацепления, чтобы механически соединять тракт передачи крутящего момента, так что поворот поворотных колес продолжается посредством использования силы, прикладываемой водителем к рабочему элементу руления.
Как проиллюстрировано на Фиг. 1, устройство 1 управления рулением в настоящем варианте осуществления включает в себя поворотный мотор 2 и мотор 4 для силы противодействия и дублирующую муфту 6. Помимо этого, устройство 1 управления рулением включает в себя детектор 8 инструкций двигателя, детектор 10 крутящего момента руления, детектор 12 скорости транспортного средства, детектор 14 угла руления, детектор 16 угла поворота, контроллер 18 поворотного мотора и контроллер 20 мотора для силы противодействия.
[0012] Поворотный мотор 2 представляет собой мотор, который приводится в действие в ответ на задающий ток поворотного мотора, выводимый из контроллера 18 поворотного мотора, и выводит крутящий момент поворота, чтобы поворачивать поворотные колеса W. Крутящий момент поворота, выводимый из поворотного мотора 2, передается на реечную передачу 24 через выходной вал 22 поворотного мотора, который должен вращаться посредством приведения в действие поворотного мотора 2.
Реечная передача 24 включает в себя вал 26 реечной передачи, смещенный в направлении ширины транспортного средства в соответствии с вращением выходного вала 22 поворотного мотора. Оба конца вала 26 реечной передачи соединены с поворотными колесами W, соответственно.
[0013] Поворотные колеса W представляют собой передние колеса транспортного средства (т.е. левое и правое передние колеса) и поворачивают в соответствии со смещением в направлении ширины транспортного средства вала 26 реечной передачи и изменяют направление движения транспортного средства. Следует отметить, что в настоящем варианте осуществления описывается случай, в котором поворотные колеса W конфигурируются с помощью левого и правого передних колес. В соответствии с этим, на Фиг. 1 поворотное колесо W левого переднего колеса указывается в качестве поворотного колеса WFL, тогда как поворотное колесо правого переднего колеса указывается в качестве поворотного колеса WFR.
Мотор 4 для силы противодействия смещается между рабочим элементом 28 руления и дублирующей муфтой 6.
[0014] Дополнительно, мотор 4 для силы противодействия представляет собой мотор, который приводится в действие в ответ на задающий ток мотора для силы противодействия, выводимый из контроллера 20 мотора для силы противодействия, и допускает вывод силы противодействия при рулении на рулевой вал 30. Таким образом, мотор 4 для силы противодействия выводит силу противодействия при рулении в рабочий элемент 28 руления через рулевой вал 30.
В данном документе, сила противодействия при рулении, которую мотор 4 для силы противодействия выводит в рабочий элемент 28 руления, представляет собой силу противодействия, выводимую на рулевой вал 30 в состоянии, в котором дублирующая муфта 6 переключается на состояние расцепления, и тракт передачи крутящего момента между рабочим элементом 28 руления и поворотными колесами W механически разъединяется.
[0015] Другими словами, сила противодействия при рулении, которую мотор 4 для силы противодействия выводит на рулевой вал 30, представляет собой силу противодействия, которая должна прикладываться в противоположном направлении относительно рабочего направления, в котором водитель выполняет руление за счет рабочего элемента 28 руления.
Кроме того, вычисление силы противодействия при рулении выполняется в соответствии с осевой силой шины, прикладываемой к поворотным колесам W, или с состоянием руления рабочего элемента 28 руления. Соответственно, надлежащая сила противодействия при рулении передается водителю, который выполняет руление рабочим элементом 28 руления.
Дублирующая муфта 6 размещается между рабочим элементом 28 руления, которым управляет водитель, и поворотными колесами W и переключается между состоянием зацепления и состоянием расцепления в зависимости от задающего тока муфты, выводимого из контроллера 18 поворотного мотора. Следует отметить, что дублирующая муфта 6 находится в состоянии расцепления в нормальном состоянии.
[0016] Когда состояние дублирующей муфты 6 переключается на состояние расцепления, один конец рулевого вала 30 отстоит от одного конца вала 32 шестерни. Таким образом, тракт передачи крутящего момента между рабочим элементом 28 руления и поворотными колесами W механически разъединяется, чтобы не передавать операцию руления рабочего элемента 28 руления на поворотные колеса W. Следует отметить, что один конец рулевого вала 30 соединяется с диском 34 муфты на стороне руления во внутренней части дублирующей муфты 6 и соединяет другой конец рулевого вала 30 с рабочим элементом 28 руления, чтобы вращаться с рабочим элементом 28 руления. Кроме того, один конец вала 32 шестерни соединяется с диском 36 муфты на стороне поворота во внутренней части дублирующей муфты 6 и зацепляет шестерню (не проиллюстрирована), размещаемую на другом конце вала 32 шестерни, с реечной передачей 24.
[0017] С другой стороны, когда состояние дублирующей муфты 6 переключается на состояние зацепления, один конец рулевого вала 30 соединяется с одним концом вала 32 шестерни. Соответственно, тракт передачи крутящего момента между рабочим элементом 28 руления и поворотными колесами W механически соединяется, чтобы передавать операцию руления рабочего элемента 28 руления на поворотные колеса W.
Таким образом, рулевой вал 30 конфигурирует часть тракта передачи крутящего момента.
Детектор 8 инструкций двигателя выводит в контроллер 18 поворотного мотора информационный сигнал, включающий в себя состояние двигателя (не проиллюстрирован) (т.е. приведение в действие или остановка двигателя), который представляет собой источник приведения в движение для того, чтобы приводить в движение ведущие колеса. Следует отметить, что в настоящем варианте осуществления, в качестве примера, ведущие колеса представляют собой задние колеса (т.е. левое и правое задние колеса) транспортного средства (не проиллюстрировано). Тем не менее, настоящее раскрытие сущности не ограничивается этим. Поворотные колеса W также могут быть выполнены с возможностью служить в качестве ведущих колес, в качестве передних колес транспортного средства, в одном варианте осуществления. Кроме того, источник приведения в движение не ограничивается двигателем, и любой мотор, допускающий приведение в действие ведущих колес, является применимым в одном варианте осуществления.
[0018] Например, детектор 10 крутящего момента руления предоставляется в рулевой колонке (не проиллюстрирована), поддерживающей с возможностью вращения рабочий элемент 28 руления, и определяет крутящий момент, прикладываемый к рулевому валу 30, когда водитель управляет рабочим элементом 28 руления. Затем, детектор 10 крутящего момента руления выводит информационный сигнал, включающий в себя определенный крутящий момент руления, в контроллер 18 поворотного мотора. Следует отметить, что в нижеприведенном описании, крутящий момент руления упоминается в качестве "значения Vts датчика крутящего момента" в некоторых случаях.
[0019] Детектор 12 скорости транспортного средства представляет собой известный датчик скорости транспортного средства и определяет скорость транспортного средства. Затем, детектор 12 скорости транспортного средства выводит информационный сигнал, включающий в себя определенную скорость транспортного средства, в контроллер 18 поворотного мотора и контроллер 20 мотора для силы противодействия.
Детектор 14 угла руления конфигурируется, например, с круговым датчиком позиции и т.п. и предоставляется в рулевой колонке, идентично детектору 10 крутящего момента руления.
Помимо этого, детектор 14 угла руления определяет текущий угол руления, который является текущим углом поворота рабочего элемента 28 руления (т.е. рабочей величиной руления). Затем, детектор 14 угла руления выводит информационный сигнал, включающий в себя определенный текущий угол руления рабочего элемента 28 руления, в контроллер 18 поворотного мотора и контроллер 20 мотора для силы противодействия. Следует отметить, что в нижеприведенном описании, текущий угол руления упоминается в качестве "текущего угла θs руления" в некоторых случаях.
[0020] Детектор 16 угла поворота конфигурируется, например, с круговым датчиком позиции и предоставляется в поворотном моторе 2.
Помимо этого, детектор 16 угла поворота определяет угол поворота (т.е. угол поворота) поворотного мотора 2. Затем, детектор 16 угла поворота выводит информационный сигнал, включающий в себя определенный угол поворота (в дальнейшем в этом документе, называемый "углом поворота поворотного мотора" в некоторых случаях), в контроллер 18 поворотного мотора. Следует отметить, что в нижеприведенном описании, угол поворота поворотного мотора упоминается в качестве "фактического угла θt поворота" в некоторых случаях.
[0021] Контроллер 18 поворотного мотора вводит и выводит информационные сигналы в/из контроллера 20 мотора для силы противодействия, детектора 8 инструкций двигателя и детектора 12 скорости транспортного средства через линии 38 связи, такие как CAN (т.е. контроллерная сеть).
Помимо этого, контроллер 18 поворотного мотора управляет приведением в действие поворотного мотора 2 на основе информационного сигнала, принимаемого через линии 38 связи, и информационного сигнала, принимаемого из детектора 14 угла руления. Следует отметить, что подробная конфигурация контроллера 18 поворотного мотора описывается ниже.
[0022] Контроллер 20 мотора для силы противодействия вводит и выводит информационные сигналы в/из контроллера 18 поворотного мотора и детектора 12 скорости транспортного средства через линии 38 связи.
Помимо этого, контроллер 20 мотора для силы противодействия управляет приведением в действие мотора 4 для силы противодействия на основе информационных сигналов, принимаемых через линии 38 связи, и информационного сигнала, принимаемого из детектора 14 угла руления. Следует отметить, что подробная конфигурация контроллера 20 мотора для силы противодействия описывается ниже.
[0023] Подробная конфигурация контроллера 18 поворотного мотора
В дальнейшем в этом документе описывается подробная конфигурация контроллера 18 поворотного мотора посредством использования Фиг. 2 и Фиг. 3, наряду с взаимосвязью с другой конфигурацией по Фиг. 2, со ссылкой на Фиг. 1.
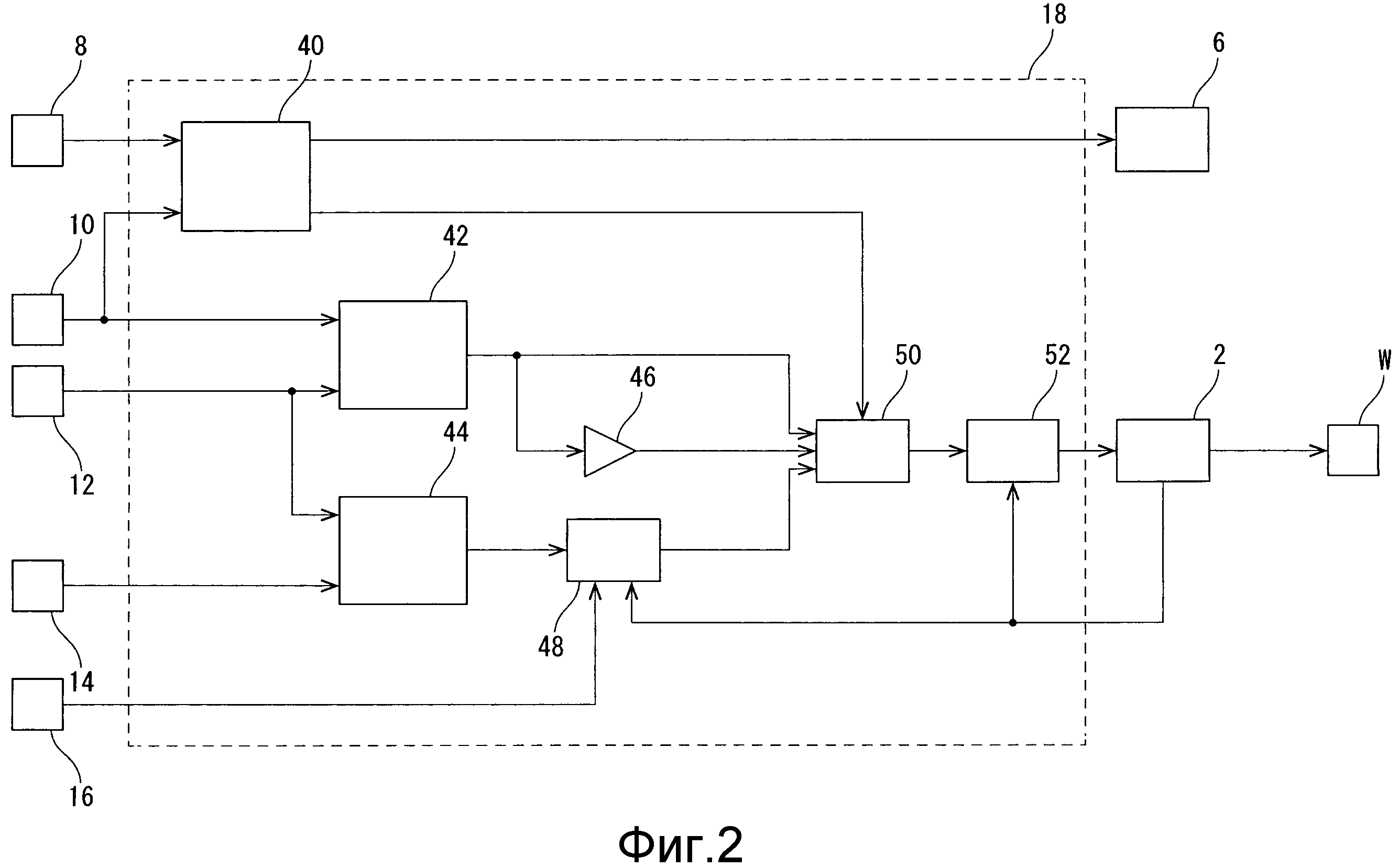
Фиг. 2 является блок-схемой, иллюстрирующей подробную конфигурацию контроллера 18 поворотного мотора.
Как проиллюстрировано на Фиг. 2, контроллер 18 поворотного мотора включает в себя контроллер 40 муфты, EPS-контроллер 42 и модуль 44 вычисления задающего угла SBW-поворота. Дополнительно, контроллер 18 поворотного мотора также включает в себя модуль 46 суммирования коэффициентов усиления, сервоконтроллер 48 позиций поворота, модуль 50 переключения задающего тока поворота и сервоконтроллер 52 задающего тока поворота.
[0024] Контроллер 40 муфты принимает ввод информационного сигнала, выводимого из детектора 8 инструкций двигателя, и ввод информационного сигнала, выводимого из детектора 10 крутящего момента руления. Затем, контроллер 40 муфты формирует флаг управления муфтой и флаг переключения управления при повороте на основе состояния двигателя, включенного в информационный сигнал, выводимый из детектора 8 инструкций двигателя, и значения Vts датчика крутящего момента, включенного в информационный сигнал, выводимый из детектора 10 крутящего момента руления.
[0025] Кроме того, контроллер 40 муфты выводит информационный сигнал, включающий в себя сформированный флаг управления муфтой, в дублирующую муфту 6 в качестве задающего тока муфты. Помимо этого, контроллер 40 муфты выводит информационный сигнал, включающий в себя сформированный флаг переключения управления при повороте, в модуль 50 переключения задающего тока поворота.
В данном документе, флаг управления муфтой является значением команды для переключения задающего тока муфты, который должен выводиться в дублирующую муфту 6, и имеет инструкцию расцепления и инструкцию зацепления.
Дополнительно, флаг переключения управления при повороте является значением команды для переключения задающего тока поворота, который должен выводиться в поворотный мотор 2, и имеет EPS-состояние и SBW-состояние.
[0026] В дальнейшем в этом документе, со ссылкой на Фиг. 3 описывается процесс, посредством контроллера 40 муфты, формирования флага управления муфтой и флага переключения управления при повороте.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей процесс, посредством контроллера 40 муфты, формирования флага управления муфтой и флага переключения управления при повороте.
Блок-схема последовательности операций способа, проиллюстрированная на Фиг. 3, начинается из состояния, в котором двигатель транспортного средства останавливается (т.е. "Начало", указываемое на чертеже).
Сначала, на этапе S10, контроллер 40 муфты обращается к информационному сигналу, выводимому из детектора 8 инструкций двигателя, определяет то, активирован или нет двигатель, который остановлен, и определяет то, запущен или нет двигатель (т.е. "Зажигание включено?", указываемое на чертеже).
[0027] На этапе S10, когда определяется то, что двигатель запущен (т.е. "Y", указываемое на чертеже), процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S20.
С другой стороны, на этапе S10, когда определяется то, что двигатель не запущен (т.е. "N", указываемое на чертеже), контроллер 40 муфты повторяет процесс этапа S10.
На этапе S20, контроллер 40 муфты формирует флаг переключения управления при повороте в качестве EPS-состояния (т.е. "флаг переключения управления при повороте = EPS-состояние", указываемое на чертеже). Когда контроллер 40 муфты формирует флаг переключения управления при повороте в качестве EPS-состояния на этапе S20, процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S30.
[0028] На этапе S30, контроллер 40 муфты обращается к информационному сигналу, выводимому из детектора 10 крутящего момента руления. Затем, определяется то, равно или меньше либо нет абсолютное значение Vts датчика крутящего момента, прикладываемое водителем к рулевому валу 30, предварительно заданного крутящего момента Ts1 начала расцепления муфты (т.е. "|крутящий момент руления|<=Ts1?", указываемое на чертеже). Следует отметить, что в настоящем варианте осуществления, в качестве примера, положительный (+) крутящий момент задается в качестве крутящего момента руления в состоянии, в котором рабочий элемент 28 руления вращается вправо (по часовой стрелке) из нейтрального положения, тогда как отрицательный (-) крутящий момент задается в качестве крутящего момента руления в состоянии, в котором рабочий элемент 28 руления вращается влево (против часовой стрелки) из нейтрального положения.
[0029] В этом случае, крутящий момент Ts1 начала расцепления муфты устанавливается согласно, например, конфигурации транспортного средства, содержащего устройство 1 управления рулением (например, свойствам жесткости рабочего элемента 28 руления и рулевого вала 30). Помимо этого, крутящий момент Ts1 начала расцепления муфты сохраняется в контроллере 40 муфты. Следует отметить, что, например, крутящий момент Ts1 начала расцепления муфты вычисляется, например, посредством эксперимента.
Значение крутящего момента Ts1 начала расцепления муфты (т.е. значение крутящего момента) является значением, при котором воздействие, прикладываемое от рабочего элемента 28 руления к водителю, выполняющему руление рабочим элементом 28 руления через захват руками водителя рабочего элемента 28 руления, является небольшим, когда дублирующая муфта 6 расцепляется.
[0030] Когда на этапе S30 определяется то, что абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts1 начала расцепления муфты (т.е. "Y", указываемое на чертеже), процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S40.
С другой стороны, когда на этапе S30 определяется то, что абсолютное значение Vts датчика крутящего момента превышает крутящий момент Ts1 начала расцепления муфты (т.е. "N", указываемое на чертеже), контроллер 40 муфты повторяет процесс этапа S30.
[0031] На этапе S40, контроллер 40 муфты формирует флаг управления муфтой в качестве инструкции расцепления (т.е. "флаг управления муфтой = инструкция расцепления", указываемое на чертеже). Когда, на этапе S40, когда контроллер 40 муфты формирует флаг управления муфтой в качестве инструкции расцепления, процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S50.
На этапе S50, контроллер 40 муфты обращается к информационному сигналу, выводимому из детектора 10 крутящего момента руления. Затем, определяется то, равно или меньше либо нет абсолютное значение Vts датчика крутящего момента, прикладываемого водителем к рулевому валу 30, предварительно заданного крутящего момента Ts2 оценки расцепления муфты (т.е. "|крутящий момент руления|<=Ts2?", указываемое на чертеже).
[0032] В данном документе, крутящий момент Ts2 оценки расцепления муфты представляет собой крутящий момент ниже крутящего момента Ts1 начала расцепления муфты и устанавливается согласно, например, конфигурации транспортного средства, содержащего устройство 1 управления рулением (например, свойствам жесткости рабочего элемента 28 руления и рулевого вала 30). Помимо этого, крутящий момент Ts2 оценки расцепления муфты сохраняется в контроллере 40 муфты, аналогично крутящему моменту Ts1 начала расцепления муфты. Следует отметить, что крутящий момент Ts2 оценки расцепления муфты вычисляется посредством эксперимента, например, аналогично крутящему моменту Ts1 начала расцепления муфты.
[0033] Когда на этапе S50 определяется то, что абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts2 оценки расцепления муфты (т.е. "Y", указываемое на чертеже), процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S60.
С другой стороны, когда на этапе S50 определяется то, что абсолютное значение Vts датчика крутящего момента превышает крутящий момент Ts2 оценки расцепления муфты (т.е. "N", указываемое на чертеже), процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S70.
[0034] На этапе S60, контроллер 40 муфты активирует таймер, включенный в него (т.е. "таймер = таймер+1", указываемое на чертеже). Соответственно, измерение истекшего времени для определения, которое является периодом в то время, когда абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts2 оценки расцепления муфты, начинается на этапе S60. Когда измерение истекшего времени для определения начинается на этапе S60, процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S80.
[0035] На этапе S70, контроллер 40 муфты не активирует таймер, включенный в него (т.е. "таймер=0", указываемое на чертеже), и процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S80.
На этапе S80, определяется то, равно или превышает либо нет истекшее время для определения, которое измеряется, предварительно заданное время Tm определения SBW-переключения (т.е. "истекшее время для определения>=Tm?", указываемое на чертеже).
[0036] В этом случае, время Tm определения SBW-переключения является периодом от времени начала процесса изменения состояния дублирующей муфты 6 из состояния зацепления в состояние расцепления до оцененного времени, когда дублирующая муфта 6 полностью переключается в состояние расцепления. Помимо этого, время Tm определения SBW-переключения устанавливается согласно, например, конфигурации транспортного средства, содержащего устройство 1 управления рулением (например, свойствам жесткости рабочего элемента 28 руления и рулевого вала 30).
[0037] Дополнительно, время Tm определения SBW-переключения сохраняется в контроллере 40 муфты, аналогично крутящему моменту Ts1 начала расцепления муфты. Следует отметить, что время Tm определения SBW-переключения вычисляется посредством эксперимента, например, аналогично крутящему моменту Ts1 начала расцепления муфты. Когда на этапе S80 определяется то, что истекшее время для определения равно или превышает время Tm определения SBW-переключения (т.е. "Y", указываемое на чертеже), процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S90.
[0038] С другой стороны, на этапе S80 определяется то, что истекшее время для определения меньше времени Tm определения SBW-переключения (т.е. "N", указываемое на чертеже), процесс, который должен осуществляться посредством контроллера 40 муфты, переходит к этапу S50.
На этапе S90, контроллер 40 муфты формирует флаг переключения управления при повороте в качестве SBW-состояния (т.е. "флаг переключения управления при повороте = SBW-состояние", указываемое на чертеже). Когда контроллер 40 муфты формирует флаг переключения управления при повороте в качестве SBW-состояния на этапе S90, процесс, который должен осуществляться посредством контроллера 40 муфты, завершается (т.е. "Конец", указываемое на чертеже).
[0039] Как описано выше, контроллер 40 муфты устанавливает дублирующую муфту 6 в состояние зацепления при запуске двигателя. Помимо этого, когда крутящий момент руления, определенный посредством детектора 10 крутящего момента руления после того, как запускается двигатель, равен или меньше крутящего момента Ts1 начала расцепления муфты, контроллер 40 муфты переключает дублирующую муфту 6 в состоянии зацепления в состояние расцепления.
Кроме того, когда истекшее время для определения равно или превышает время Tm определения SBW-переключения после того, как состояние зацепления дублирующей муфты 6 начинает переключаться на состояние расцепления, контроллер 40 муфты определяет то, что завершено переключение дублирующей муфты 6 из состояния зацепления в состояние расцепления.
[0040] EPS-контроллер 42 принимает ввод информационного сигнала, выводимого из детектора 10 крутящего момента руления, и ввод информационного сигнала, выводимого из детектора 12 скорости транспортного средства. Затем, EPS-контроллер 42 вычисляет ток EPS-содействия во время отказа на основе значения Vts датчика крутящего момента, включенного в информационный сигнал, выводимый из детектора 10 крутящего момента руления, и скорости транспортного средства, включенной в информационный сигнал, выводимый из детектора 12 скорости транспортного средства.
Помимо этого, EPS-контроллер 42 выводит информационный сигнал, включающий в себя ток EPS-содействия во время отказа, который вычислен, в модуль 46 суммирования коэффициентов усиления и модуль 50 переключения задающего тока поворота.
[0041] В данном документе, ток EPS-содействия во время отказа является значением команды управления в соответствии с задающим током поворотного мотора, чтобы выводить крутящий момент содействия при рулении в поворотные колеса W из поворотного мотора 2, когда анормальность, например, разъединение и т.п., возникает в SBW-системе.
В этом случае, крутящий момент содействия при рулении, который поворотный мотор 2 выводит в поворотные колеса W, представляет собой крутящий момент, выводимый в поворотные колеса W в состоянии, в котором дублирующая муфта 6 переключается на состояние зацепления, и тракт передачи крутящего момента между рабочим элементом 28 руления и поворотными колесами W механически соединяется.
[0042] Следует отметить, что в настоящем варианте осуществления, крутящий момент содействия при повороте, выводимый из поворотного мотора 2, при том, что дублирующая муфта 6 установлена в состояние зацепления при запуске двигателя, устанавливается равным такому значению, что крутящий момент руления становится равным или ниже крутящего момента начала расцепления муфты.
Соответственно, значение крутящего момента для крутящего момента содействия при рулении, выводимого из поворотного мотора 2, при том, что дублирующая муфта 6 установлена в состояние зацепления при запуске двигателя, задается такому значению, чтобы стимулировать водителя, который управляет рабочим элементом 28 руления, выполнять операцию руления, при которой крутящий момент руления становится равным или ниже крутящего момента начала расцепления муфты.
[0043] В этом случае, например, дублирующая муфта 6 устанавливается в состояние зацепления, и крутящий момент содействия при рулении, выводимый из поворотного мотора 2, выводится в качестве крутящего момента, противоположного относительно направления руления рабочего элемента 28 руления, управляемого водителем. Такой выходной крутящий момент передается в рабочий элемент 28 руления через тракт передачи крутящего момента.
Следует отметить, что значение крутящего момента для крутящего момента содействия при рулении, чтобы стимулировать водителя, который управляет рабочим элементом 28 руления, выполнять операцию руления, при которой крутящий момент руления становится равным или меньше крутящего момента начала расцепления муфты, вычисляется, например, посредством эксперимента, на основе данных рабочих характеристик и т.п. транспортного средства, содержащего устройство 1 управления рулением.
[0044] Модуль 44 вычисления задающего угла SBW-поворота принимает ввод информационного сигнала, выводимого из детектора 12 скорости транспортного средства, и ввод информационного сигнала, выводимого из детектора 14 угла руления. Затем, модуль 44 вычисления задающего угла SBW-поворота вычисляет задающий угол поворота на основе скорости транспортного средства, включенной в информационный сигнал, выводимый из детектора 12 скорости транспортного средства, и текущего угла θs руления, включенного в информационный сигнал, выводимый из детектора 14 угла руления.
Помимо этого, модуль 44 вычисления задающего угла SBW-поворота выводит информационный сигнал, включающий в себя задающий угол поворота, который вычислен, в сервоконтроллер 48 позиций поворота.
[0045] В данном документе, задающий угол поворота является значением команды управления током для вычисления целевого угла поворота в ответ на операцию водителя с рабочим элементом 28 руления и управляет приведением в действие поворотного мотора 2 в зависимости от целевого угла поворота, который вычислен.
Модуль 46 суммирования коэффициентов усиления принимает ввод информационного сигнала, выводимого из EPS-контроллера 42. Затем, модуль 46 суммирования коэффициентов усиления умножает предварительно заданный коэффициент усиления содействия во время запуска на ток EPS-содействия во время отказа, включенный в информационный сигнал, выводимый из EPS-контроллера 42, чтобы вычислять ток EPS-содействия во время запуска.
[0046] Помимо этого, модуль 46 суммирования коэффициентов усиления выводит информационный сигнал, включающий в себя ток EPS-содействия во время запуска, который вычислен, в модуль 50 переключения задающего тока поворота.
В данном документе, ток EPS-содействия во время запуска является значением команды в ответ на задающий ток поворотного мотора, чтобы выводить крутящий момент содействия при повороте из поворотного мотора 2 на поворотные колеса W при запуске двигателя.
Дополнительно, коэффициент усиления содействия во время запуска устанавливается таким образом, что ток EPS-содействия во время запуска должен превышать ток EPS-содействия во время отказа в соответствии с рабочими характеристиками (т.е. выходной мощностью и т.п.) поворотного мотора 2, и сохраняется в модуле 46 суммирования коэффициентов усиления.
[0047] Как описано выше, крутящий момент содействия при повороте, выводимый из поворотного мотора 2, при том, что дублирующая муфта 6 установлена в состояние зацепления при запуске двигателя, задается таким образом, что он представляет собой крутящий момент, превышающий крутящий момент содействия при повороте, выводимый из поворотного мотора 2, при том, что дублирующая муфта 6 установлена в состояние зацепления во время отказа устройства 1 управления рулением.
Сервоконтроллер 48 позиций поворота принимает ввод информационного сигнала, выводимого из модуля 44 вычисления задающего угла SBW-поворота. Затем, сервоконтроллер 48 позиций поворота вычисляет задающий ток SBW-поворота на основе задающего угла поворота, включенного в информационный сигнал, выводимый из модуля 44 вычисления задающего угла SBW-поворота.
[0048] Помимо этого, сервоконтроллер 48 позиций поворота выводит информационный сигнал, включающий в себя задающий ток SBW-поворота, который вычислен, в модуль 50 переключения задающего тока поворота и сервоконтроллер 52 задающего тока поворота.
В данном документе, задающий ток SBW-поворота является значением команды управления в соответствии с задающим током поворотного мотора, чтобы выводить крутящий момент в зависимости от целевого угла поворота на поворотные колеса W.
Дополнительно, сервоконтроллер 48 позиций поворота принимает ввод информационного сигнала, выводимого из детектора 16 угла поворота, и ввод информационного сигнала, выводимого из сервоконтроллера 52 задающего тока поворота. Помимо этого, сервоконтроллер 48 позиций поворота определяет задающий ток поворотного мотора, который в итоге выведен в поворотный мотор 2. Затем, информационные сигналы, выводимые из детектора 16 угла поворота и сервоконтроллера 52 задающего тока поворота, и задающий ток поворотного мотора, в итоге выводимый в поворотный мотор 2, используются для вычисления задающего тока SBW-поворота. Соответственно, сервоконтроллер 48 позиций поворота выполняет управление с обратной связью для вычисления задающего тока SBW-поворота.
[0049] Модуль 50 переключения задающего тока поворота принимает вводы информационных сигналов, выводимых из контроллера 40 муфты, EPS-контроллера 42, модуля 46 суммирования коэффициентов усиления и сервоконтроллера 48 позиций поворота.
Помимо этого, модуль 50 переключения задающего тока поворота переключает задающий ток поворота на основе флага переключения управления при повороте, включенного в информационный сигнал, выводимый из контроллера 40 муфты. Затем, информационный сигнал, включающий в себя переключенный ток, выводится в сервоконтроллер 52 задающего тока поворота.
[0050] В частности, когда флаг переключения управления при повороте находится в EPS-состоянии, и возникает анормальность в SBW-системе, задающий ток поворота переключается на ток EPS-содействия во время отказа. Следует отметить, что анормальность, возникающая в SBW-системе, определяется, например, посредством модуля мониторинга (не проиллюстрирован), чтобы отслеживать состояние SBW-системы.
Кроме того, когда флаг переключения управления при повороте находится в EPS-состоянии, и не возникает анормальность в SBW-системе, задающий ток поворота переключается на ток EPS-содействия во время запуска.
[0051] Дополнительно, когда флаг переключения управления при повороте находится в SBW-состоянии, задающий ток поворота переключается на задающий ток SBW-поворота.
Сервоконтроллер 52 задающего тока поворота принимает ввод информационного сигнала, выводимого из модуля 50 переключения задающего тока поворота. Затем, сервоконтроллер 52 задающего тока поворота изменяет напряжение, которое должно подаваться в поворотный мотор 2, так что задающий ток поворотного мотора в зависимости от задающего тока поворота, включенного в информационный сигнал, выводимый из модуля 50 переключения задающего тока поворота, должен вводиться в поворотный мотор 2.
Помимо этого, сервоконтроллер 52 задающего тока поворота вводит и выводит информационные сигналы в/из сервоконтроллера 48 позиций поворота. Информационный сигнал, который должен выводиться в сервоконтроллер 48 позиций поворота из сервоконтроллера 52 задающего тока поворота, включает в себя напряжение, которое должно подаваться в поворотный мотор 2.
[0052] Подробная конфигурация контроллера 20 мотора для силы противодействия
В дальнейшем в этом документе описывается конфигурация контроллера 20 мотора для силы противодействия посредством использования Фиг. 4, со ссылкой на Фиг. 1-3, наряду с взаимосвязью с другой конфигурацией по Фиг. 4.
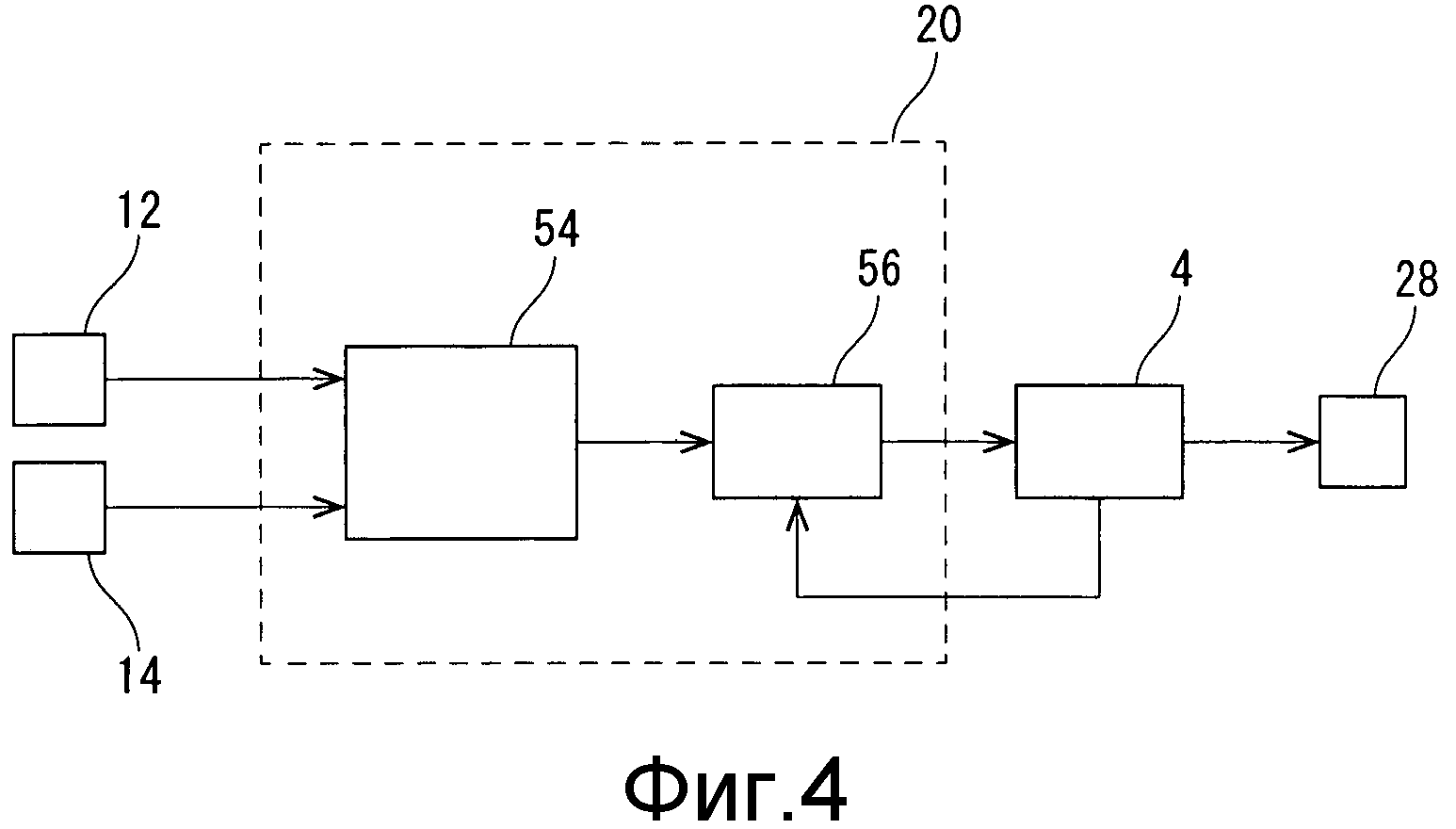
Фиг. 4 является блок-схемой, иллюстрирующей подробную конфигурацию контроллера 20 мотора для силы противодействия.
Как проиллюстрировано на Фиг. 4, контроллер 20 мотора для силы противодействия включает в себя модуль 54 вычисления задающего тока силы SBW-противодействия и сервоконтроллер 56 задающего тока силы противодействия.
Модуль 54 вычисления задающего тока силы SBW-противодействия принимает ввод информационного сигнала, выводимого из детектора 12 скорости транспортного средства, и ввод информационного сигнала, выводимого из детектора 14 угла руления. Затем, модуль 54 вычисления задающего тока силы SBW-противодействия вычисляет задающий ток силы противодействия на основе скорости транспортного средства, включенной в информационный сигнал, выводимый из детектора 12 скорости транспортного средства, и текущего угла θs руления, включенного в информационный сигнал, выводимый из детектора 14 угла руления.
[0053] Помимо этого, модуль 54 вычисления задающего тока силы SBW-противодействия выводит информационный сигнал, включающий в себя задающий ток силы противодействия, который вычислен, в сервоконтроллер 56 задающего тока силы противодействия.
В данном документе, задающий ток силы противодействия является значением команды управления током, чтобы управлять приведением в действие мотора 4 для силы противодействия.
Дополнительно, задающий ток силы противодействия получается, например, посредством умножения фактического угла θt поворота на предварительно заданный коэффициент усиления мотора для силы противодействия. В данном документе, коэффициент усиления мотора для силы противодействия задается заранее посредством использования карты коэффициентов усиления силы противодействия. Следует отметить, что карта коэффициентов усиления силы противодействия является картой в зависимости от скорости транспортного средства и угла руления рабочего элемента 28 руления, создается заранее и сохраняется в модуле 54 вычисления задающего тока силы SBW-противодействия.
[0054] Затем, модуль 54 вычисления задающего тока силы SBW-противодействия выводит информационный сигнал, включающий в себя задающий ток силы противодействия, который вычислен, в сервоконтроллер 56 задающего тока силы противодействия.
Сервоконтроллер 56 задающего тока силы противодействия принимает ввод информационного сигнала, выводимого из модуля 54 вычисления задающего тока силы SBW-противодействия. Затем, сервоконтроллер 56 задающего тока силы противодействия изменяет напряжение, которое должно подаваться в мотор 4 для силы противодействия, так что задающий ток мотора для силы противодействия в зависимости от задающего тока силы противодействия, включенного в информационный сигнал, выводимый из модуля 54 вычисления задающего тока силы SBW-противодействия, должен вводиться в мотор 4 для силы противодействия.
Кроме того, сервоконтроллер 56 задающего тока силы противодействия определяет задающий ток мотора для силы противодействия, который в итоге выведен в мотор 4 для силы противодействия. Затем, задающий ток мотора для силы противодействия, который в итоге выведен в мотор 4 для силы противодействия, используется для управления напряжением, которое должно подаваться в мотор 4 для силы противодействия. Соответственно, сервоконтроллер 56 задающего тока силы противодействия выполняет управление с обратной связью для напряжения, которое должно подаваться в мотор 4 для силы противодействия.
[0055] Работа
Далее описывается пример операции, которая должна выполняться посредством использования устройства 1 управления рулением в настоящем варианте осуществления, посредством использования Фиг. 5, со ссылкой на Фиг. 1-4.
Фиг. 5 является временной диаграммой, иллюстрирующей пример операции, которая должна выполняться посредством использования устройства 1 управления рулением.
Временная диаграмма, проиллюстрированная на Фиг. 5, начинается из состояния ожидания (т.е. "состояния A", указываемого на чертеже), в котором двигатель останавливается, и ожидается операция переключателя зажигания (не проиллюстрирован) водителем, который сидит на водительском сиденье в транспортном средстве. В этом случае, переключатель зажигания конфигурируется, например, с кнопкой (т.е. кнопкой зажигания), которая должна управляться водителем транспортного средства.
[0056] В состоянии A, переключатель зажигания не управляется (т.е. "Выключено", указываемое на чертеже), как проиллюстрировано в столбце "Зажигание", представляющем рабочий режим переключателя зажигания.
Таким образом, в состоянии A, задающий ток поворота равен "0", как проиллюстрировано в столбце "задающий ток поворота", и как проиллюстрировано в столбце "сила противодействия", сила противодействия при рулении, выводимая из мотора 4 для силы противодействия на рулевой вал 30, равна "0".
Помимо этого, как проиллюстрировано в столбце "флаг управления муфтой", флаг управления муфтой является "инструкцией зацепления". Кроме того, как проиллюстрировано в столбце "флаг переключения управления при повороте", флаг переключения управления при повороте находится в "EPS-состоянии".
[0057] В настоящем варианте осуществления, в состоянии A описывается случай, в котором водитель транспортного средства выполняет руление рабочим элементом 28 руления, к примеру, случай, в котором водитель транспортного средства захватывает рабочий элемент 28 руления. Таким образом, в состоянии A, как проиллюстрировано в столбце "крутящий момент руления", значение Vts датчика крутящего момента, определенное посредством детектора 10 крутящего момента руления, превышает состояние, в котором водитель не выполняет руление за счет рабочего элемента 28 руления.
Дополнительно, в состоянии A, поскольку флаг управления муфтой указывает "инструкцию зацепления", дублирующая муфта 6 зацеплена, и тракт передачи крутящего момента между рабочим элементом 28 руления и поворотными колесами W механически соединен.
[0058] По этой причине, в состоянии A, текущий угол θs руления, определенный посредством детектора 14 угла руления, изменяется, как проиллюстрировано в столбце "угол руления", в ответ на операцию руления водителем рабочего элемента 28 руления. Помимо этого, фактический угол θt поворота, определенный посредством детектора 16 угла поворота, изменяется, как указано в "угле поворота".
В состоянии A, когда переключатель зажигания управляется водителем (т.е. "Включено", указываемое на чертеже), и детектор 8 инструкций двигателя определяет активацию двигателя в качестве состояния двигателя, операция, выполняемая посредством использования устройства 1 управления рулением, переключается из состояния A на состояние B.
[0059] В состоянии B, EPS-контроллер 42 вычисляет ток EPS-содействия во время отказа и выводит информационный сигнал, включающий в себя ток EPS-содействия во время отказа, который вычислен, в модуль 46 суммирования коэффициентов усиления и модуль 50 переключения задающего тока поворота. Затем, модуль 46 суммирования коэффициентов усиления умножает ток EPS-содействия во время отказа на коэффициент усиления содействия во время запуска, с тем, чтобы вычислять ток EPS-содействия во время запуска, превышающий ток EPS-содействия во время отказа. Кроме того, модуль 46 суммирования коэффициентов усиления выводит информационный сигнал, включающий в себя ток EPS-содействия во время запуска, который вычислен, в модуль 50 переключения задающего тока поворота.
[0060] Затем, модуль 50 переключения задающего тока поворота переключает задающий ток поворота на ток EPS-содействия во время запуска на основе флага переключения управления при повороте. Дополнительно, модуль 50 переключения задающего тока поворота выводит информационный сигнал, включающий в себя ток EPS-содействия во время запуска, в сервоконтроллер 52 задающего тока поворота.
Затем, сервоконтроллер 52 задающего тока поворота, который принимает ввод информационного сигнала, включающего в себя ток EPS-содействия во время запуска, изменяет напряжение, которое должно подаваться в поворотный мотор 2, так что задающий ток поворотного мотора согласно току EPS-содействия во время запуска должен вводиться в поворотный мотор 2.
[0061] Соответственно, как проиллюстрировано в столбце "задающий ток поворота", задающий ток поворотного мотора, вводимый в поворотный мотор 2, изменяется согласно углу руления рабочего элемента 28 руления, после постепенного увеличения с истечением времени (т.е. "увеличение", указываемое на чертеже).
В данном документе, в настоящем варианте осуществления, ток EPS-содействия во время запуска задается равным большему значению по сравнению с током EPS-содействия во время отказа. Следовательно, можно задавать задающий ток поворотного мотора, вводимый в поворотный мотор 2 при запуске двигателя, так что он превышает задающий ток поворотного мотора, вводимый в поворотный мотор 2, когда возникает анормальность в SBW-системе.
[0062] Помимо этого, по мере того, как увеличивается угол руления рабочего элемента 28 руления, увеличивается угол поворота поворотных колес W. Помимо этого, по мере того, как увеличивается угол руления рабочего элемента 28 руления, сила противодействия при рулении, выводимая из мотора 4 для силы противодействия на рулевой вал 30, изменяется в соответствии с углом руления рабочего элемента 28 руления, после постепенного увеличения с истечением времени (т.е. "увеличение", указываемое на чертеже).
Дополнительно, в состоянии B, флаг управления муфтой поддерживается согласно "инструкции зацепления" аналогично состоянию A, и флаг переключения управления при повороте поддерживается в "EPS-состоянии".
[0063] В состоянии B, крутящий момент руления, который водитель прикладывает к рулевому валу 30, становится более низким, и когда абсолютное значение Vts датчика крутящего момента становится равным или меньшим крутящего момента Ts1 начала расцепления муфты, операция, выполняемая посредством использования устройства 1 управления рулением, переключается из состояния B в состояние C.
В состоянии C контроллер 40 муфты формирует флаг управления муфтой в качестве "инструкции расцепления". Затем, контроллер 40 муфты выводит информационный сигнал, сформированный в качестве "инструкции расцепления", в дублирующую муфту 6 в качестве задающего тока муфты. Дублирующая муфта 6, которая принимает ввод задающего тока муфты, начинает переключение из состояния зацепления в состояние расцепления.
[0064] Помимо этого, в состоянии C, флаг переключения управления при повороте поддерживается в "EPS-состоянии", аналогично состоянию B.
Дополнительно, в состоянии C, мотор 4 для силы противодействия выводит силу противодействия при рулении в соответствии с углом руления рабочего элемента 28 руления на рулевой вал 30, аналогично состоянию B.
Таким образом, после состояния, в котором дублирующая муфта 6 устанавливается в состояние зацепления, и поворотный мотор 2 выводит крутящий момент содействия при повороте, до состояния, в котором дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, контроллер 20 мотора для силы противодействия выводит силу противодействия при рулении на рулевой вал 30.
[0065] По этой причине, в настоящем варианте осуществления, в состоянии C, в котором поворотный мотор 2 выводит крутящий момент содействия при повороте, а мотор 4 для силы противодействия выводит силу противодействия при рулении на рулевой вал 30, дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления.
Соответственно, в настоящем варианте осуществления, воздействие, передаваемое на рабочий элемент 28 руления от дублирующей муфты 6, когда состояние зацепления переключается на состояние расцепления, ниже силы противодействия при рулении, которая должна выводиться посредством мотора 4 для силы противодействия на рулевой вал 30.
[0066] Когда абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts2 оценки расцепления муфты в состоянии C, таймер, включенный в контроллер 40 муфты, активируется, чтобы начинать измерение истекшего времени для определения.
Когда истекшее время для определения становится равным или большим времени определения SBW-переключения, контроллер 40 муфты определяет то, что переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления завершается. Затем, операция, выполняемая посредством использования устройства 1 управления рулением, переключается из состояния C в состояние D.
[0067] В состоянии D, контроллер 40 муфты формирует флаг переключения управления при повороте в качестве "SBW-состояния". Затем, контроллер 40 муфты выводит информационный сигнал, включающий в себя флаг переключения управления при повороте, который сформирован в качестве "SBW-состояния", в модуль 50 переключения задающего тока поворота.
Соответственно, в настоящем варианте осуществления, когда истекшее время для определения меньше времени Tm определения SBW-переключения, определяется то, что не завершается переключение из состояния зацепления в состояние расцепления дублирующей муфты 6, флаг переключения управления при повороте поддерживается в "EPS-состоянии".
[0068] Затем, модуль 50 переключения задающего тока поворота переключает задающий ток поворота с тока EPS-содействия во время запуска на задающий ток SBW-поворота на основе флага переключения управления при повороте. Кроме того, модуль 50 переключения задающего тока поворота выводит информационный сигнал, включающий в себя задающий ток SBW-поворота, в сервоконтроллер 52 задающего тока поворота.
Затем, сервоконтроллер 52 задающего тока поворота, который принимает ввод информационного сигнала, включающего в себя задающий ток SBW-поворота, изменяет напряжение, которое должно подаваться в поворотный мотор 2, так что задающий ток поворотного мотора согласно задающему току SBW-поворота должен вводиться в поворотный мотор 2.
[0069] Другими словами, контроллер 18 поворотного мотора инструктирует поворотному мотору 2 выводить крутящий момент содействия при повороте, когда контроллер 40 муфты задает состояние дублирующей муфты 6 как состояние зацепления. Помимо этого, контроллер 18 поворотного мотора инструктирует поворотному мотору 2 выводить крутящий момент поворота в зависимости от целевого угла поворота, в соответствии с задающим током SBW-поворота, когда контроллер 40 муфты переключает дублирующую муфту 6 в состоянии зацепления в состояние расцепления.
[0070] Кроме того, когда контроллер 40 муфты определяет то, что завершается переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления, контроллер 18 поворотного мотора выводит крутящий момент поворота в зависимости от целевого угла поворота, чтобы управлять приведением в действие поворотного мотора 2.
Соответственно, как проиллюстрировано в столбце "задающий ток поворота", задающий ток поворотного мотора, вводимый в поворотный мотор 2, постепенно увеличивается с истечением времени ("увеличение", указываемое на чертеже) и затем изменяется в соответствии с углом руления рабочего элемента 28 руления.
[0071] Помимо этого, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, обеспечивается переключение из EPS-состояния в SBW-состояние с обеспечением возможности уменьшения воздействия, принимаемого через захват руками водителя рабочего элемента 28 руления.
Дополнительно, в состоянии D, флаг управления муфтой поддерживается согласно "инструкции расцепления" аналогично состоянию C.
[0072] Следует отметить, что, согласно способу управления рулением, который должен выполняться при работе устройства 1 управления рулением, в настоящем варианте осуществления, как описано выше, определяется крутящий момент руления, прикладываемый водителем к рулевому валу 30. Помимо этого, дублирующая муфта 6 устанавливается в состояние зацепления при запуске двигателя, и когда крутящий момент руления, определенный после запуска двигателя, равен или меньше крутящего момента Ts1 начала расцепления муфты, дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления. Кроме того, когда состояние дублирующей муфты 6 устанавливается как состояние зацепления, крутящий момент содействия при повороте выводится из поворотного мотора 2, и когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, крутящий момент поворота в зависимости от целевого угла поворота выводится из поворотного мотора 2.
[0073] Преимущество первого варианта осуществления
В некоторых вариантах осуществления, могут предоставляться преимущества, которые описываются ниже.
(1) Контроллер 40 муфты устанавливает дублирующую муфту 6 в состояние зацепления при запуске двигателя, и когда абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts1 начала расцепления муфты после того, как запускается двигатель, дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления.
Помимо этого, когда контроллер 40 муфты устанавливает состояние дублирующей муфты 6 как состояние зацепления, контроллер 18 поворотного мотора инструктирует поворотному мотору 2 выводить крутящий момент содействия при повороте согласно току EPS-содействия во время запуска. Дополнительно, когда контроллер 40 муфты переключает дублирующую муфту 6 в состоянии зацепления в состояние расцепления, крутящий момент поворота в зависимости от целевого угла поворота выводится из поворотного мотора 2, в соответствии с задающим током SBW-поворота.
[0074] Соответственно, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, обеспечивается переключение из EPS-состояния в SBW-состояние с обеспечением возможности уменьшения воздействия, принимаемого водителем через захват руками водителя рабочего элемента 28 руления.
Как результат, можно подавлять различение состояния руления рабочего элемента 28 руления от намерения водителя при запуске двигателя. Кроме того, можно не допускать при захвате руками водителя рабочего элемента 28 руления потерю управления посредством рабочего элемента 28 руления, и также можно плавно переключаться из EPS-состояния в SBW-состояние.
[0075] (2) Когда абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts1 начала расцепления муфты после того, как запускается двигатель, контроллер 40 муфты переключает дублирующую муфту 6 в состоянии зацепления в состояние расцепления.
Соответственно, можно подавлять свободную вибрацию детектора 10 крутящего момента руления или рулевого вала 30, вызываемую посредством изменения крутящего момента руления, сформированного, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления.
Как результат, можно подавлять шум или вибрацию, сформированную, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, и также можно уменьшать чувство дискомфорта, которое ощущает водитель.
[0076] (3) Контроллер 18 поворотного мотора устанавливает значение крутящего момента для крутящего момента содействия при повороте, выводимого из поворотного мотора 2 в состоянии, в котором дублирующая муфта 6 находится в состоянии зацепления при запуске двигателя, так что оно представляет собой значение, при котором крутящий момент руления становится равным или ниже крутящего момента начала расцепления муфты.
Соответственно, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, обеспечивается переключение из EPS-состояния в SBW-состояние с возможностью уменьшения чувства дискомфорта, возникающего вследствие захвата водителем рабочего элемента 28 руления.
Как результат, можно уменьшать чувство дискомфорта, принимаемое посредством захвата водителем рабочего элемента 28 руления при запуске двигателя, и также можно плавно переключаться из EPS-состояния в SBW-состояние.
[0077] (4) Контроллер 18 поворотного мотора устанавливает крутящий момент содействия при повороте, выводимый во время запуска двигателя, так что он превышает крутящий момент содействия при повороте, выводимый во время отказа устройства 1 управления рулением. Другими словами, ток EPS-содействия во время запуска задается так, что он превышает ток EPS-содействия во время отказа.
Соответственно, можно устанавливать задающий ток поворотного мотора, вводимый в поворотный мотор 2 при запуске двигателя, так что он превышает задающий ток поворотного мотора, вводимый в поворотный мотор 2, когда возникает анормальность в SBW-системе.
Как результат, посредством сокращения времени, в то время как водитель уменьшает крутящий момент руления, прикладываемый к рулевому валу 30 при запуске двигателя, появляется возможность сокращать время, требуемое для переключения дублирующей муфты 6 в состоянии зацепления в состояние расцепления.
[0078] (5) После состояния, в котором дублирующая муфта 6 устанавливается в состояние зацепления, и поворотный мотор 2 выводит крутящий момент содействия при повороте, до состояния, в котором дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, контроллер 20 мотора для силы противодействия выводит силу противодействия при рулении на рулевой вал 30.
Соответственно, можно переключать дублирующую муфту 6 в состоянии зацепления в состояние расцепления, в то время как поворотный мотор 2 выводит крутящий момент содействия при повороте, и мотор 4 для силы противодействия выводит силу противодействия при рулении на рулевой вал 30.
[0079] Как результат, воздействие, передаваемое на рабочий элемент 28 руления через рулевой вал 30 от дублирующей муфты 6, когда состояние зацепления переключается на состояние расцепления, ниже силы противодействия при рулении, выводимой из мотора 4 для силы противодействия на рулевой вал 30. Таким образом, можно уменьшать чувство дискомфорта, такое как изменение силы противодействия и т.п., ощущаемое водителем, который захватывает рабочий элемент 28 руления в ответ на переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления.
[0080] (6) Когда истекшее время для определения равно или превышает время Tm определения SBW-переключения, контроллер 40 муфты определяет то, что переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления завершается. Помимо этого, когда контроллер 40 муфты определяет то, что завершается переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления, контроллер 18 поворотного мотора выводит крутящий момент поворота в зависимости от целевого угла поворота.
[0081] Соответственно, когда истекшее время для определения меньше времени Tm определения SBW-переключения, контроллер 40 муфты определяет то, что не завершается переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления, и флаг переключения управления при повороте поддерживается в "EPS-состоянии".
Как результат, даже после того, как инструкция расцепления выводится в дублирующую муфту 6, в то время когда дублирующая муфта 6 находится в состоянии зацепления, поддерживается состояние, в котором крутящий момент содействия при повороте выводится из поворотного мотора 2. Соответственно, можно повышать достоверность процесса переключения из состояния зацепления дублирующей муфты 6 в состояние расцепления.
[0082] Помимо этого, в качестве способа повышения достоверности процесса переключения дублирующей муфты 6 из состояния зацепления в состояние расцепления, предусмотрен способ установки дублирующей муфты 6 в состояние расцепления с прекращением приведения в действие (т.е. поворота) поворотного мотора 2 и мотора 4 для силы противодействия. Дополнительно, предусмотрен способ взаимодействия за счет приведения в действие (т.е. поворота) поворотного мотора 2 с приведением в действие (т.е. поворота) мотора 4 для силы противодействия.
Тем не менее, в вышеописанных двух способах водитель, который захватывает рабочий элемент 28 руления, испытывает чувство дискомфорта от воздействия при установке дублирующей муфты 6 в состояние расцепления или от взаимодействия поворотного мотора 2 и мотора 4 для силы противодействия.
[0083] Напротив, согласно процессу, выполняемому посредством контроллера 40 муфты в настоящем варианте осуществления, когда дублирующая муфта 6 находится в состоянии зацепления, поддерживается состояние вывода крутящего момента содействия при повороте из поворотного мотора 2. Соответственно, можно уменьшать чувство дискомфорта, ощущаемое водителем, который захватывает рабочий элемент 28 руления, и также можно повышать достоверность процесса переключения из состояния зацепления дублирующей муфты 6 в состояние расцепления.
[0084] (7) В способе управления рулением в настоящем варианте осуществления, определяется крутящий момент руления, который должен прикладываться к рулевому валу 30, когда водитель управляет рабочим элементом 28 руления. Помимо этого, дублирующая муфта 6 устанавливается в состояние зацепления при запуске двигателя. Когда крутящий момент руления, определенный после того, как запускается двигатель, равен или меньше крутящего момента Ts1 начала расцепления муфты, дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления. Кроме того, когда дублирующая муфта 6 устанавливается в состояние зацепления, крутящий момент содействия при повороте выводится из поворотного мотора 2. Когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, крутящий момент поворота в соответствии с углом поворота выводится из поворотного мотора 2.
[0085] Соответственно, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, можно переключаться из EPS-состояния в SBW-состояние с обеспечением возможности уменьшения воздействия, принимаемого водителем через захват руками водителя рабочего элемента 28 руления.
Как результат, можно подавлять различение состояния руления рабочего элемента 28 руления от намерения водителя при запуске двигателя. Помимо этого, можно не допускать при захвате руками водителя рабочего элемента 28 руления потерю управления посредством операции рабочего элемента 28 руления, и также можно плавно переключаться из EPS-состояния в SBW-состояние.
[0086] Соответственно, можно подавлять свободную вибрацию детектора 10 крутящего момента руления или рулевого вала 30, вызываемую посредством изменения крутящего момента руления, сформированного, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления. Как результат, можно подавлять шум или вибрацию, сформированную, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления, и также можно уменьшать чувство дискомфорта, которое ощущает водитель.
[0087] Модификации
(1) В некоторых вариантах осуществления, когда истекшее время для определения равно или превышает время Tm определения SBW-переключения, контроллер 40 муфты определяет то, что переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления завершается. Тем не менее, настоящее раскрытие сущности не ограничено этим.
Другими словами, например, контроллер 40 муфты может осуществлять следующий процесс, который описывается ниже в другом варианте осуществления.
После того, как начинается переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления, когда абсолютное значение Vts датчика крутящего момента становится равным или меньшим крутящего момента Ts2 оценки расцепления муфты, контроллер 40 муфты определяет то, что переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления завершается. Помимо этого, до тех пор, пока истекшее время для определения не равно или превышает время Tm определения SBW-переключения, когда абсолютное значение Vts датчика крутящего момента превышает крутящий момент Ts2 оценки расцепления муфты, дублирующая муфта 6 в состоянии расцепления переключается на состояние зацепления.
При вышеуказанной конфигурации, можно сокращать время, истекшее от EPS-состояния до SBW-состояния, и можно повышать чувствительность устройства 1 управления рулением, а также улучшать ощущение руления, принимаемое водителем.
[0088] Второй вариант осуществления
В дальнейшем в этом документе, описывается второй вариант осуществления (в дальнейшем в этом документе, называемый "настоящим вариантом осуществления") настоящего раскрытия сущности посредством использования Фиг. 6, со ссылкой на Фиг. 1-5. Следует отметить, что в настоящем варианте осуществления, конфигурация является идентичной конфигурации в первом варианте осуществления, за исключением конфигурации контроллера 18 поворотного мотора. Следовательно, опускаются описания, помимо контроллера 18 поворотного мотора. Помимо этого, конфигурации, идентичные конфигурациям первого варианта осуществления, описываются с идентичными ссылками с номерами.
[0089] Конфигурация
Фиг. 6 является блок-схемой, иллюстрирующей подробную конфигурацию контроллера 18 поворотного мотора.
Как проиллюстрировано на Фиг. 6, контроллер 18 поворотного мотора включает в себя контроллер 40 муфты, модуль 44 вычисления задающего угла SBW-поворота, модуль 58 вычисления задающего угла соответствующего EPS-поворота, модуль 60 переключения задающего угла поворота и сервоконтроллер 48 позиций поворота.
Конфигурация контроллера 40 муфты является аналогичной конфигурации первого варианта осуществления, как описано выше, и его описание опускается.
[0090] Модуль 44 вычисления задающего угла SBW-поворота принимает вводы информационного сигнала, выводимого из детектора 12 скорости транспортного средства, и информационного сигнала, выводимого из детектора 14 угла руления. Затем, модуль 44 вычисления задающего угла SBW-поворота вычисляет задающий угол поворота на основе скорости транспортного средства, включенной в информационный сигнал, выводимый из детектора 12 скорости транспортного средства, и текущего угла θs руления, включенного в информационный сигнал, выводимый из детектора 14 угла руления.
Помимо этого, модуль 44 вычисления задающего угла SBW-поворота выводит информационный сигнал, включающий в себя задающий угол поворота, который вычислен, в модуль 58 вычисления задающего угла соответствующего EPS-поворота и модуль 60 переключения задающего угла поворота.
[0091] Модуль 58 вычисления задающего угла соответствующего EPS-поворота включает в себя формирователь 62 коэффициента усиления для вычисления крутящего момента содействия при повороте и модуль 64 коррекции задающего угла поворота.
Формирователь 62 коэффициента усиления для вычисления крутящего момента содействия при повороте принимает информационный сигнал, выводимый из детектора 10 крутящего момента руления. Затем, формирователь 62 коэффициента усиления для вычисления крутящего момента содействия при повороте умножает значение Vts датчика крутящего момента, включенное в информационный сигнал, выводимый из детектора 10 крутящего момента руления, на предварительно заданный поправочный коэффициент крутящего момента содействия при повороте, с тем чтобы формировать коэффициент усиления для вычисления крутящего момента содействия при повороте.
[0092] В данном документе, коэффициент коррекции крутящего момента содействия при повороте задается в зависимости от рабочих характеристик (т.е. выходной мощности и т.п.) поворотного мотора 2 и сохраняется в формирователе 62 коэффициента усиления для вычисления крутящего момента содействия при повороте.
Дополнительно, формирователь 62 коэффициента усиления для вычисления крутящего момента содействия при повороте выводит информационный сигнал, включающий в себя коэффициент усиления для вычисления крутящего момента содействия при повороте, который сформирован, в модуль 64 коррекции задающего угла поворота.
Модуль 64 коррекции задающего угла поворота принимает вводы информационного сигнала, выводимого из модуля 44 вычисления задающего угла SBW-поворота, и информации, выводимой из формирователя 62 коэффициента усиления для вычисления крутящего момента содействия при повороте. Затем, модуль 64 коррекции задающего угла поворота суммирует (т.е. +) коэффициент усиления для вычисления крутящего момента содействия при повороте, сформированный посредством формирователя 62 коэффициента усиления для вычисления крутящего момента содействия при повороте, с задающим углом поворота, включенным в информационный сигнал, выводимый из модуля 44 вычисления задающего угла SBW-поворота, с тем чтобы вычислять задающий угол соответствующего EPS-поворота.
[0093] Кроме того, модуль 64 коррекции задающего угла поворота выводит информационный сигнал, включающий в себя задающий угол соответствующего EPS-поворота, который вычислен, в модуль 60 переключения задающего угла поворота.
В данном документе, задающий угол соответствующего EPS-поворота является значением команды управления током, чтобы управлять приведением в действие поворотного мотора 2 согласно крутящему моменту содействия при повороте.
Как описано выше, модуль 58 вычисления задающего угла соответствующего EPS-поворота вычисляет задающий угол соответствующего EPS-поворота на основе значения Vts датчика крутящего момента, включенного в информационный сигнал, выводимый из детектора 10 крутящего момента руления, и предварительно заданного коэффициента усиления для вычисления крутящего момента содействия при повороте.
[0094] Таким образом, контроллер 18 поворотного мотора в настоящем варианте осуществления корректирует задающий угол поворота, чтобы вычислять крутящий момент поворота в зависимости от целевого угла поворота посредством использования предварительно заданного коэффициента усиления для вычисления крутящего момента содействия при повороте, с тем чтобы вычислять крутящий момент содействия при повороте.
Модуль 60 переключения задающего угла поворота принимает вводы информационных сигналов, выводимых из контроллера 40 муфты, модуля 44 вычисления задающего угла SBW-поворота и модуля 58 вычисления задающего угла соответствующего EPS-поворота.
[0095] Помимо этого, модуль 60 переключения задающего угла поворота переключает задающий угол поворота на основе флага переключения управления при повороте, включенного в информационный сигнал, выводимый из контроллера 40 муфты. Затем, информационный сигнал, включающий в себя задающий угол поворота, который переключен, выводится в сервоконтроллер 48 позиций поворота.
В частности, когда флаг переключения управления при повороте находится в EPS-состоянии, задающий угол поворота переключается на задающий угол SBW-поворота.
[0096] Дополнительно, когда флаг переключения управления при повороте находится в SBW-состоянии, задающий угол поворота переключается на задающий угол соответствующего EPS-поворота.
Сервоконтроллер 48 позиций поворота принимает ввод информационного сигнала, выводимого из модуля 60 переключения задающего угла поворота. Затем, сервоконтроллер 48 позиций поворота вычисляет задающий ток поворота на основе задающего угла поворота, включенного в информационный сигнал, выводимый из модуля 60 переключения задающего угла поворота.
В этом случае, задающий ток поворота, который вычислен посредством сервоконтроллера 48 позиций поворота, является значением команды управления согласно задающему току поворотного мотора для вывода на поворотные колеса W крутящего момента, соответствующего задающему углу поворота, на который выполнено переключение посредством модуля 60 переключения задающего угла поворота.
[0097] Кроме того, сервоконтроллер 48 позиций поворота принимает ввод информационного сигнала, выводимого из детектора 16 угла поворота. Помимо этого, сервоконтроллер 48 позиций поворота определяет задающий ток поворотного мотора, который в итоге выведен в поворотный мотор 2. Затем, информационный сигнал, выводимый из детектора 16 угла поворота, и задающий ток поворотного мотора, который в итоге выведен в поворотный мотор 2, используются при вычислении задающего тока поворота. Соответственно, сервоконтроллер 48 позиций поворота выполняет управление с обратной связью в отношении вычисления задающего тока поворота.
Дополнительно, сервоконтроллер 48 позиций поворота изменяет напряжение, которое должно подаваться в поворотный мотор 2, так что задающий ток поворотного мотора в зависимости от задающего тока поворота, который вычислен, должен вводиться в поворотный мотор 2.
[0098] Работа
Далее, со ссылкой на Фиг. 1 и Фиг. 4-6, описывается пример операций посредством использования устройства 1 управления рулением в настоящем варианте осуществления.
В транспортном средстве, включающем в себя устройство 1 управления рулением в настоящем варианте осуществления, когда водитель управляет переключателем зажигания, чтобы начинать работу, модуль 58 вычисления задающего угла соответствующего EPS-поворота вычисляет задающий угол соответствующего EPS-поворота. Затем, информационный сигнал, включающий в себя задающий угол соответствующего EPS-поворота, который вычислен, выводится в модуль 60 переключения задающего угла поворота.
Контроллер 40 муфты формирует флаг управления муфтой в качестве "инструкции зацепления" и, помимо этого, формирует флаг переключения управления при повороте в качестве "EPS-состояния".
[0099] Затем, модуль 60 переключения задающего угла поворота переключает задающий угол поворота на задающий угол соответствующего EPS-поворота на основе флага переключения управления при повороте. Дополнительно, информационный сигнал, включающий в себя задающий угол соответствующего EPS-поворота, выводится в сервоконтроллер 48 позиций поворота.
Сервоконтроллер 48 позиций поворота, который принимает ввод информационного сигнала, включающего в себя ток EPS-содействия во время запуска, изменяет напряжение, которое должно подаваться в поворотный мотор 2, так что задающий ток поворотного мотора, соответствующий задающему углу соответствующего EPS-поворота, должен вводиться в поворотный мотор 2.
[0100] Когда снижается крутящий момент руления, который водитель прикладывает к рулевому валу 30, и абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts1 начала расцепления муфты, контроллер 40 муфты формирует флаг управления муфтой в качестве "инструкции расцепления". Затем, контроллер 40 муфты выводит информационный сигнал, сформированный в качестве "инструкции расцепления", в дублирующую муфту 6 в качестве задающего тока муфты. Дублирующая муфта 6, которая принимает ввод задающего тока муфты, начинает переключение из состояния зацепления в состояние расцепления.
Следует отметить, что, в этом состоянии, флаг переключения управления при повороте поддерживается в "EPS-состоянии". Помимо этого, мотор 4 для силы противодействия выводит силу противодействия при рулении согласно углу руления рабочего элемента 28 руления на рулевой вал 30.
[0101] Затем, когда абсолютное значение Vts датчика крутящего момента равно или меньше крутящего момента Ts2 оценки расцепления муфты, начинается измерение истекшего времени для определения.
Когда истекшее время для определения, которое измерено, равно или превышает время Tm определения SBW-переключения, контроллер 40 муфты определяет то, что переключение из состояния зацепления дублирующей муфты 6 в состояние расцепления завершается, и формирует флаг переключения управления при повороте в качестве "SBW-состояния". Затем, контроллер 40 муфты выводит информационный сигнал, включающий в себя флаг переключения управления при повороте, который сформирован в качестве "SBW-состояния", в модуль 60 переключения задающего угла поворота.
[0102] Затем, модуль 60 переключения задающего угла поворота переключает задающий угол поворота с задающего угла соответствующего EPS-поворота на задающий угол SBW-поворота на основе флага переключения управления при повороте.
Дополнительно, модуль 60 переключения задающего угла поворота выводит информационный сигнал, включающий в себя задающий угол SBW-поворота, в сервоконтроллер 48 позиций поворота.
Кроме того, сервоконтроллер 48 позиций поворота, который принимает ввод информационного сигнала, включающего в себя задающий угол SBW-поворота, изменяет напряжение, которое должно подаваться в поворотный мотор 2, так что задающий ток поворотного мотора согласно задающему углу SBW-поворота должен вводиться в поворотный мотор 2.
[0103] Как описано выше, в настоящем варианте осуществления, контроллер 18 поворотного мотора корректирует задающий угол поворота, чтобы вычислять крутящий момент поворота в зависимости от целевого угла поворота посредством использования предварительно заданного коэффициента усиления для вычисления крутящего момента содействия при повороте, с тем чтобы вычислять крутящий момент содействия при повороте. Соответственно, когда флаг переключения управления при повороте переключается с "EPS-состояния" на "SBW-состояние", сервоконтроллер 48 позиций поворота должен изменять напряжение, которое должно подаваться в поворотный мотор 2, согласно задающему углу поворота, который не корректируется посредством коэффициента усиления для вычисления крутящего момента содействия при повороте.
Соответственно, в настоящем варианте осуществления, когда флаг переключения управления при повороте переключается с "EPS-состояния" на "SBW-состояние", сервоконтроллер 48 позиций поворота может продолжать сервоуправление углом поворота.
[0104] Преимущества второго варианта осуществления
Согласно устройству 1 управления транспортным средством в настоящем варианте осуществления, предоставляются следующие преимущества.
(1) Контроллер 18 поворотного мотора корректирует задающий угол поворота, чтобы вычислять крутящий момент поворота в зависимости от целевого угла поворота, посредством использования предварительно заданного коэффициента усиления для вычисления крутящего момента содействия при повороте, с тем, чтобы вычислять крутящий момент содействия при повороте.
Соответственно, когда флаг переключения управления при повороте переключается с "EPS-состояния" на "SBW-состояние", сервоконтроллер 48 позиций поворота изменяет напряжение, которое должно подаваться в поворотный мотор 2, в соответствии с задающим углом поворота, который не корректируется посредством коэффициента усиления для вычисления крутящего момента содействия при повороте.
[0105] Как результат, когда флаг переключения управления при повороте переключается с "EPS-состояния" на "SBW-состояние", сервоконтроллер 48 позиций поворота может продолжать сервоуправление углом поворота, и в силу этого можно плавно переключаться из EPS-состояния в SBW-состояние. Соответственно, можно уменьшать чувство дискомфорта, которое ощущает водитель, когда дублирующая муфта 6 в состоянии зацепления переключается на состояние расцепления.
[0106] Раскрытие сущности заявки на патент (Япония) №2012-12621 (поданной 16 мая 2012 года), включающее в себя описание, формулу изобретения, чертежи и реферат, полностью содержится в данном документе по ссылке.
В данном документе, описано только ограниченное число вариантов осуществления. Объем прав настоящего раскрытия сущности не ограничивается вышеописанными вариантами осуществления. Специалистам в данной области техники должно быть очевидным, что в эти варианты осуществления могут вноситься изменения на основе вышеописанного раскрытия сущности.
Список условных обозначений
[0107] 1 - устройство управления рулением
2 - поворотный мотор
4 - мотор для силы противодействия
6 - дублирующая муфта
8 - детектор инструкций двигателя
10 - детектор крутящего момента руления
12 - детектор скорости транспортного средства
14 - детектор угла руления
16 - детектор угла поворота
18 - контроллер поворотного мотора
20 - контроллер мотора для силы противодействия
22 - выходной вал поворотного мотора
24 - реечная передача
26 - вал реечной передачи
28 - рабочий элемент руления
30 - рулевой вал
32 - вал шестерни
34 - пластина муфты на стороне руления
36 - пластина муфты на стороне поворота
38 - линия связи
40 - контроллер муфты
42 - EPS-контроллер
44 - модуль вычисления задающего угла SBW-поворота
46 - модуль суммирования коэффициентов усиления
48 - сервоконтроллер позиций поворота
50 - модуль переключения задающего тока поворота
52 - сервоконтроллер задающего тока поворота
54 - модуль вычисления задающего тока силы SBW-противодействия
56 - сервоконтроллер задающего тока силы противодействия
58 - модуль вычисления задающего угла соответствующего EPS-поворота
60 - модуль переключения задающего угла поворота
62 - формирователь коэффициента усиления для вычисления крутящего момента содействия при повороте
64 - модуль коррекции задающего угла поворота
W - поворотное колесо (левое переднее колесо WFL, правое переднее колесо WFR)
Реферат
Группа изобретений относится к устройству управления рулением транспортного средства и способу управления рулением транспортного средства, в которых можно не допускать различения состояния руления рабочего элемента руления от намерения водителя при запуске источника приведения в движение. Дублирующая муфта, которая является переключаемой между состоянием расцепления, в котором тракт передачи крутящего момента механически разъединен, и состоянием зацепления, в котором тракт передачи крутящего момента механически соединен, устанавливается в состояние зацепления при запуске двигателя. Когда крутящий момент руления, определенный после того, как запускается двигатель, становится равным или меньшим крутящего момента Ts1 начала расцепления муфты, дублирующая муфта в состоянии зацепления переключается на состояние расцепления. Когда состояние дублирующей муфты устанавливается как состояние зацепления, крутящий момент содействия при рулении, содействующий при повороте поворотных колес, выводится из поворотного мотора для поворота поворотных колес в ответ на операцию с рабочим элементом руления. Когда дублирующая муфта в состоянии зацепления переключается на состояние расцепления, крутящий момент поворота в зависимости от целевого угла поворота в ответ на операцию с рабочим элементом руления выводится из поворотного мотора, с тем чтобы управлять приведением в действие поворотного мотора. Обеспечивается точность управления. 2 н. и 5 з.п. ф-лы, 6 ил.
Формула
- источник приведения в движение, выполненный с возможностью приводить в движение ведущее колесо;
- поворотный мотор, выполненный с возможностью поворачивать поворотное колесо;
- дублирующую муфту, выполненную с возможностью переключения между состоянием расцепления с механическим разъединением тракта передачи крутящего момента между рабочим элементом руления, управляемым водителем, и поворотным колесом и состоянием зацепления с механическим соединением тракта передачи крутящего момента;
- детектор крутящего момента руления, выполненный с возможностью определять крутящий момент руления, который должен прикладываться к рулевому валу, включенному в тракт передачи крутящего момента, когда водитель управляет рабочим элементом руления;
- контроллер муфты, выполненный с возможностью устанавливать дублирующую муфту в состояние зацепления при запуске источника приведения в движение и переключать дублирующую муфту в состоянии зацепления в состояние расцепления, когда крутящий момент руления, определенный посредством детектора крутящего момента руления после того, как запускается источник приведения в движение, становится равным или меньшим крутящего момента начала расцепления муфты, который устанавливается заранее; и
- контроллер поворотного мотора, выполненный с возможностью инструктировать поворотному мотору выводить крутящий момент содействия при повороте, чтобы содействовать в повороте поворотного колеса, в ответ на операцию с рабочим элементом руления, когда контроллер муфты устанавливает дублирующую муфту в состояние зацепления, и выполненный с возможностью инструктировать поворотному мотору выводить крутящий момент поворота в зависимости от целевого угла поворота в ответ на операцию с рабочим элементом руления, когда контроллер муфты переключает дублирующую муфту в состоянии зацепления в состояние расцепления,
- при этом контроллер муфты выполнен с возможностью определять то, что изменение состояния дублирующей муфты из состояния зацепления в состояние расцепления завершается, когда истекшее время для определения, которое является периодом в то время, когда крутящий момент руления, определенный посредством детектора крутящего момента руления, который равен или меньше предварительно заданного крутящего момента оценки расцепления муфты, равно или превышает предварительно заданное время определения SBW-переключения после того, как начинается переключение состояния зацепления дублирующей муфты на состояние расцепления,
- при этом контроллер поворотного мотора выполнен с возможностью выводить крутящий момент поворота в зависимости от целевого угла поворота, чтобы управлять приведением в действие поворотного мотора, когда контроллер муфты определяет то, что завершается изменение из состояния зацепления дублирующей муфты в состояние расцепления, и
- при этом крутящий момент оценки расцепления муфты ниже крутящего момента состояния расцепления муфты.
- мотор для силы противодействия, выполненный с возможностью выводить на рулевой вал силу противодействия при рулении, которая должна прикладываться в противоположном направлении относительно рабочего направления рабочего элемента руления, в отношении которого должно выполняться руление водителем; и
- контроллер мотора для силы противодействия, выполненный с возможностью выводить силу противодействия при рулении на рулевой вал, чтобы управлять приведением в действие мотора для силы противодействия, после состояния, в котором дублирующая муфта устанавливается в состояние зацепления, и поворотный мотор выводит крутящий момент содействия при повороте, до состояния, в котором дублирующая муфта в состоянии зацепления переключается на состояние расцепления.
- в котором контроллер муфты выполнен с возможностью определять то, что завершается изменение из состояния зацепления дублирующей муфты в состояние расцепления, когда крутящий момент руления, определенный посредством детектора крутящего момента руления, становится равным или меньшим крутящего момента оценки расцепления муфты после того, как начинается переключение состояния зацепления дублирующей муфты на состояние расцепления, и
- при этом дублирующая муфта в состоянии расцепления переключается на состояние зацепления, когда крутящий момент руления, определенный посредством детектора крутящего момента руления, превышает крутящий момент оценки расцепления муфты, до тех пор пока истекшее время для определения не станет равным или большим времени определения SBW-переключения.
- определяют крутящий момент руления, который должен прикладываться к рулевому валу, включенному в тракт передачи крутящего момента между рабочим элементом руления и поворотным колесом, когда водитель управляет рабочим элементом руления;
- устанавливают дублирующую муфту, выполненную с возможностью переключения между состоянием расцепления с механическим разъединением тракта передачи крутящего момента и состоянием зацепления с механическим соединением тракта передачи крутящего момента, в состояние зацепления при запуске источника приведения в движение для приведения в действие рулевого колеса, и переключают дублирующую муфту в состоянии зацепления в состояние расцепления, когда крутящий момент руления, определенный после того, как запускается источник приведения в движение, становится равным или меньшим крутящего момента начала расцепления муфты, который устанавливается заранее; и
- инструктируют поворотному мотору выводить крутящий момент содействия при повороте, чтобы содействовать в повороте поворотного колеса, в ответ на операцию с рабочим элементом руления, когда дублирующая муфта устанавливается в состояние зацепления, и инструктируют поворотному мотору выводить крутящий момент поворота в зависимости от целевого угла поворота в ответ на операцию с рабочим элементом руления, когда дублирующая муфта в состоянии зацепления переключается на состояние расцепления, с тем чтобы управлять приведением в действие поворотного мотора,
- при этом контроллер муфты выполнен с возможностью определять то, что изменение состояния дублирующей муфты из состояния зацепления в состояние расцепления, когда истекшее время для определения, которое является периодом в то время, когда крутящий момент руления, определенный посредством детектора крутящего момента руления, который равен или меньше предварительно заданного крутящего момента оценки расцепления муфты, равно или превышает предварительно заданное время определения SBW-переключения после того, как начинается переключение состояния зацепления дублирующей муфты на состояние расцепления,
- при этом контроллер поворотного мотора выполнен с возможностью выводить крутящий момент поворота в зависимости от целевого угла поворота, чтобы управлять приведением в действие поворотного мотора, когда контроллер муфты определяет то, что завершается изменение из состояния зацепления дублирующей муфты в состояние расцепления, и
- при этом крутящий момент оценки расцепления муфты ниже крутящего момента состояния расцепления муфты.
Документы, цитированные в отчёте о поиске
Устройство рулевого управления транспортным средством
Комментарии