Монорельсовая направляющая система для автодорожного транспортного средства - RU2136531C1
Код документа: RU2136531C1
Чертежи
Описание
Предлагаемое изобретение касается системы автоматического управления по направлению движения автодорожного транспортного средства вдоль одного рельса.
В настоящее время по экономическим соображениям ведется поиск возможностей сокращения зон, отчуждаемых на проезжей части городских улиц и дорог для движения общественного транспорта.
Одним из потенциально возможных путей решения проблемы является использование устройств, позволяющих жестко направлять движение средств городского общественного транспорта на всем протяжении их маршрута или по меньшей мере на некоторой части этого маршрута.
Применение таких устройств гарантирует возможность уменьшения ширины полос проезжей части улиц и проездов, зарезервированных для движения общественного транспорта.
В то же время, водитель городского средства общественного транспорта постоянно и полностью занят вождением, что влечет за собой быстро нарастающую усталость, которая может оказаться чрезмерной вплоть до одурения, вследствие чего возрастает опасность возникновения дорожно-транспортных происшествий.
Система жесткого и принудительного управления транспортным средством по направлению его движения, по меньшей мере, на части его маршрута позволяет оставить или доверить водителю задачу наблюдения и контроля. Такая работа является менее утомительной, более высокооплачиваемой и более функциональной.
В общем случае выбор конструкции подобной направляющей системы осуществляется между электронными и механическими системами жесткого управления направлением движения данного средства городского общественного транспорта.
В целом ряде случаев механические направляющие системы по многим параметрам являются более предпочтительными, поскольку они обладают различными преимуществами, такими, например, как простота конструкции, надежность в эксплуатации и в конечном счете относительно невысокая стоимость реализации.
Существующие на сегодняшний день направляющие устройства механического типа для упомянутых транспортных средств имеют, однако, многочисленные недостатки, которые мешают их широкому распространению. В частности, существующие конструкции таких устройств не приспособлены для установки на транспортные средства с независимой подвеской направляющих колес переднего моста. Однако, использование жесткой передней оси оказывается невозможным на средствах городского пассажирского транспорта с пониженным расположением уровня пола при том, что указанная особенность конструкции соответствует настоятельному требованию со стороны пассажиров по соображениям облегчения и повышения безопасности при посадке и высадке пассажиров.
Кроме того, существующие механические направляющие устройства не обеспечены соответствующими средствами защиты от непреднамеренного механического разъединения подвижного и неподвижного элементов направляющего устройства или, проще говоря, схода с рельса.
Так, например, из европейского патента N 0062370 известна самонаправляющая система для транспортного средства, содержащая два рычага, на каждом из которых установлен направляющий ролик. Эта система адаптирована к полому рельсу и требует наличия на данном транспортном средстве совершенно специфической конструкции рулевого управления. Связанные друг с другом направляющие рычаги данного устройства смонтированы непосредственно на механизме рулевого управления, что делает затруднительным плавное и безударное вождение данного транспортного средства.
Другой пример реализации механического направляющего устройства транспортного средства описан в европейском патенте N 0496236. Здесь направляющий рычаг, на котором установлен скользящий направляющий орган, смонтирован под данным транспортным средством и адаптирован к полому рельсу, размещенному на дороге.
Данное направляющее устройство не содержит вращающегося направляющего ролика, вследствие чего при его использовании следует опасаться скрежетания и свиста в скользящем контакте. С другой стороны, в данном устройстве отсутствует защита от "схода с рельса". Это устройство в процессе эксплуатации подвергается интенсивному износу, следствием которого становятся нарастающие неточности и неравномерность управления.
Из патента Германии N 1455572 известна система управления направлением движения для автодорожного транспортного средства. В данном случае речь идет о тележке, смонтированной с возможностью поворота относительно некоторой центральной оси, перпендикулярной раме этой тележки.
Эта тележка содержит на каждом из своих концов пару наклонных роликов, располагающихся в форме буквы V, заостренная вершина которой направлена вниз, и находящихся в зацеплении с соответствующим направляющим рельсом.
Такая система управления направлением движения обладает многочисленными недостатками.
Жесткая конструкция рамы данной тележки не подходит для управления транспортным средством на трассах, содержащих крутые повороты.
Каждая пара роликов блокирована по углу наклона при помощи специального замка. Кроме того, в данной конструкции направляющего устройства отсутствуют средства подъема направляющих роликов от рельса. Вследствие этого обстоятельства транспортное средство, оборудованное таким направляющим устройством, не может быть использовано на трассах с достаточно крутыми виражами, а также не может быть использовано в смешанном варианте применения, то есть на трассах, имеющих участки с автоматическим управлением направлением движения с зацеплением упомянутых роликов с направляющим рельсом и участки с обычным ручным управлением движением данного транспортного средства при помощи рулевого колеса или баранки этого транспортного средства.
В основу данного изобретения положена задача устранить отмеченные недостатки, предлагая монорельсовую самонаправляющую систему для автодорожного транспортного средства, которая ведет это транспортное средство вдоль профилированного рельса и может быть задействована в постоянном режиме или временно.
Самонаправляющая система в соответствии с предлагаемым изобретением образована поворотным и убирающимся рычагом, установленным в передней части автодорожного транспортного средства. На этом рычаге друг против друга установлены два наклонных ролика со специфическими периферийными профилями, охватывающие один рельс соответствующей формы.
Самонаправляющая система в соответствии с
предлагаемым изобретением обладает целым рядом преимуществ, а именно:
- использование двух наклонных роликов исключает всякую возможность внезапного и непредвиденного схода с рельса
направляющей системы. Наклон упомянутых роликов благоприятствует выполнению операций ввода направляющей системы в зацепление с рельсом вследствие возможности использования для этого наружных
поверхностей упомянутых наклонных роликов;
- направляющие ролики несут относительно небольшую нагрузку, что способствует снижению из износа в процессе эксплуатации и позволяет монтировать эти
ролики в упругих втулках для снижения шума;
- гомогенная система обычного рулевого управления и управления с использованием направляющего рельса совместима с применением на данном
транспортном средстве переднего моста с независимой подвеской колес и позволяет использовать естественные возможности картера рулевого управления с гидравлическим усилителем для сглаживания вибраций
от управляемых колес;
- функция управления и безопасности системы обеспечивается автоматическим устройством и позволяет устанавливать так называемую систему "мертвого человека";
- несущий относительно небольшую механическую нагрузку направляющий рельс вследствие этого может быть закреплен на грунте через упругую или многослойную прокладку, снижающую уровень шума при
эксплуатации предлагаемой системы.
Другие характеристики и преимущества монорельсовой самонаправляющей системы в соответствии с предлагаемым изобретением будут продемонстрированы в
приведенном ниже описании примера его реализации со ссылками на приведенные в приложении фигуры, среди которых:
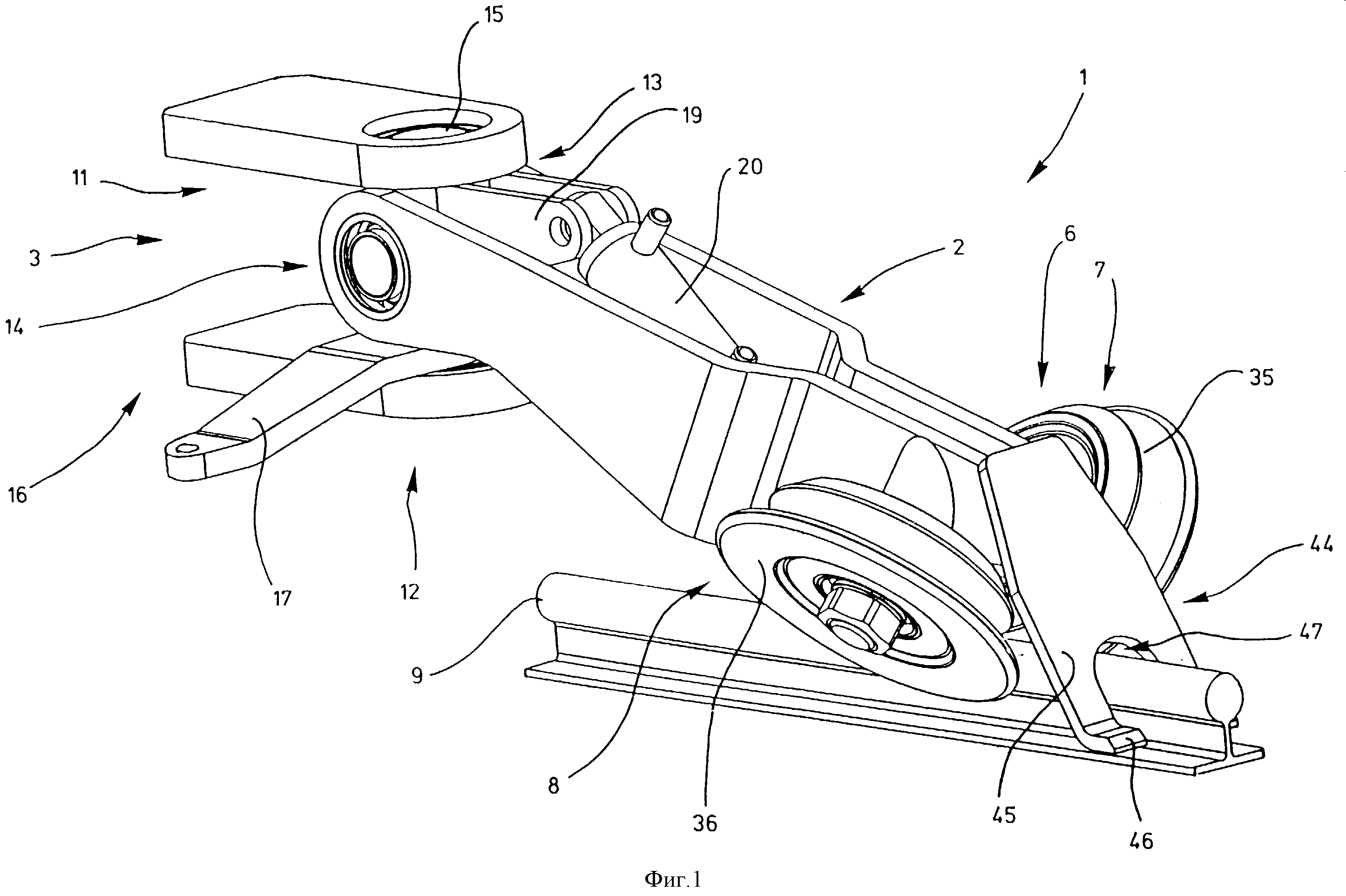
фиг. 1 - прямоугольную диметрическую проекцию самонаправляющей системы,
выполненной в соответствии с предлагаемым изобретением, в положении функционирования во взаимодействии с одним направляющим рельсом;
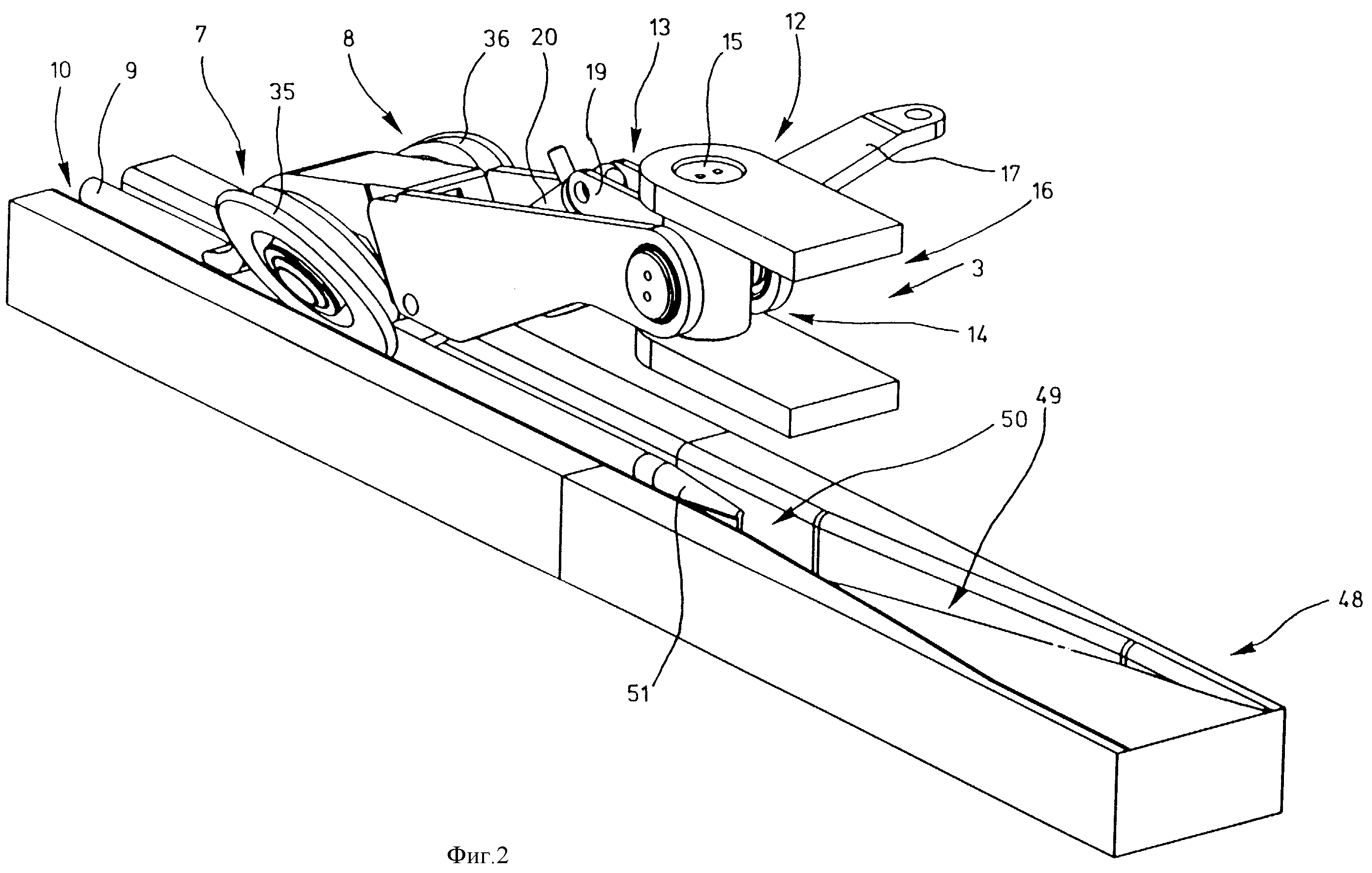
фиг. 2 - прямоугольную диметрическую проекцию той же
самонаправляющей системы, но с другой стороны;
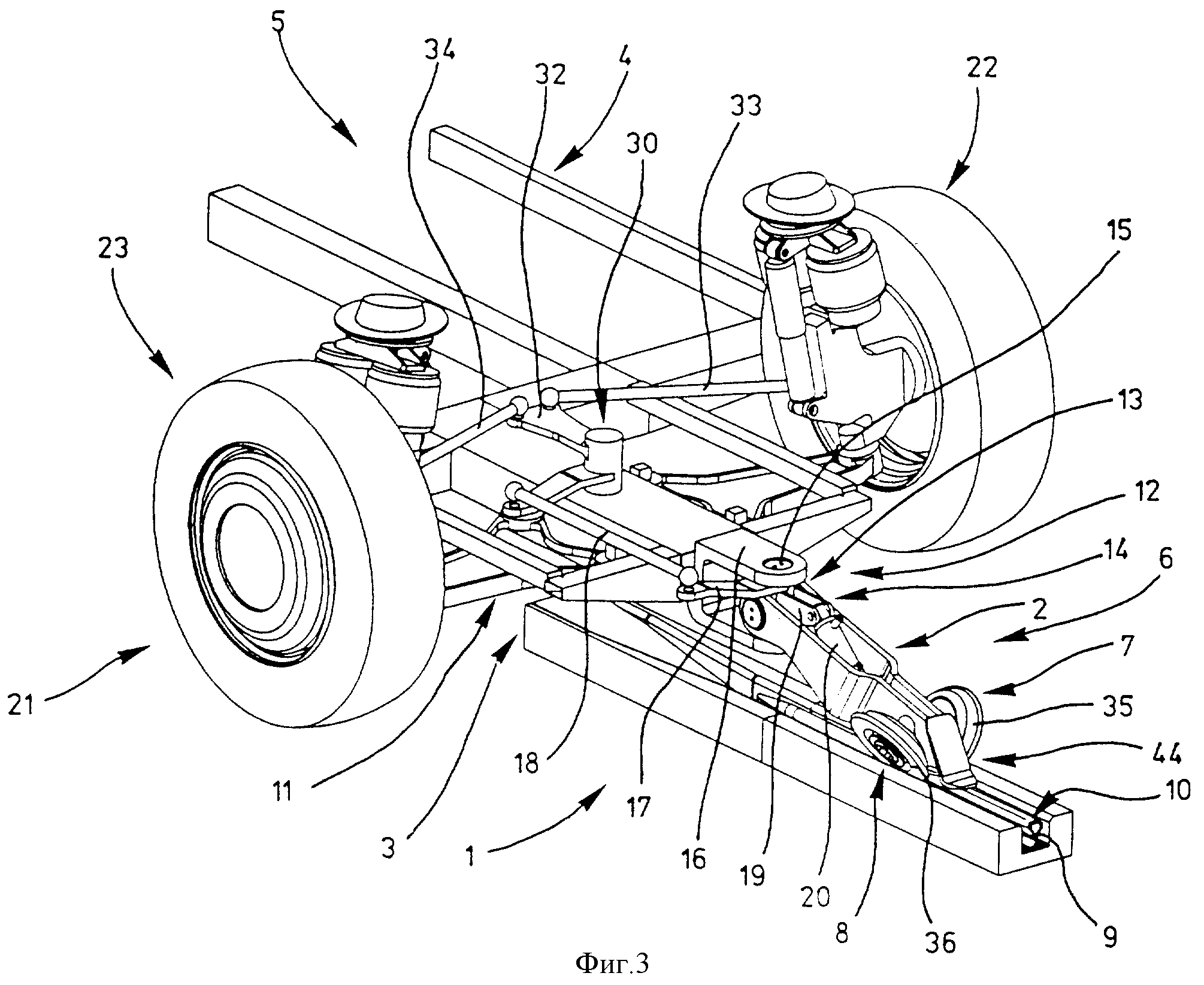
фиг. 3 представляет собой прямоугольную диметрическую проекцию самонаправляющей системы, связанной с мостом управляемых колес транспортного
средства в состоянии его прямолинейного поступательного движения вдоль направляющего рельса;
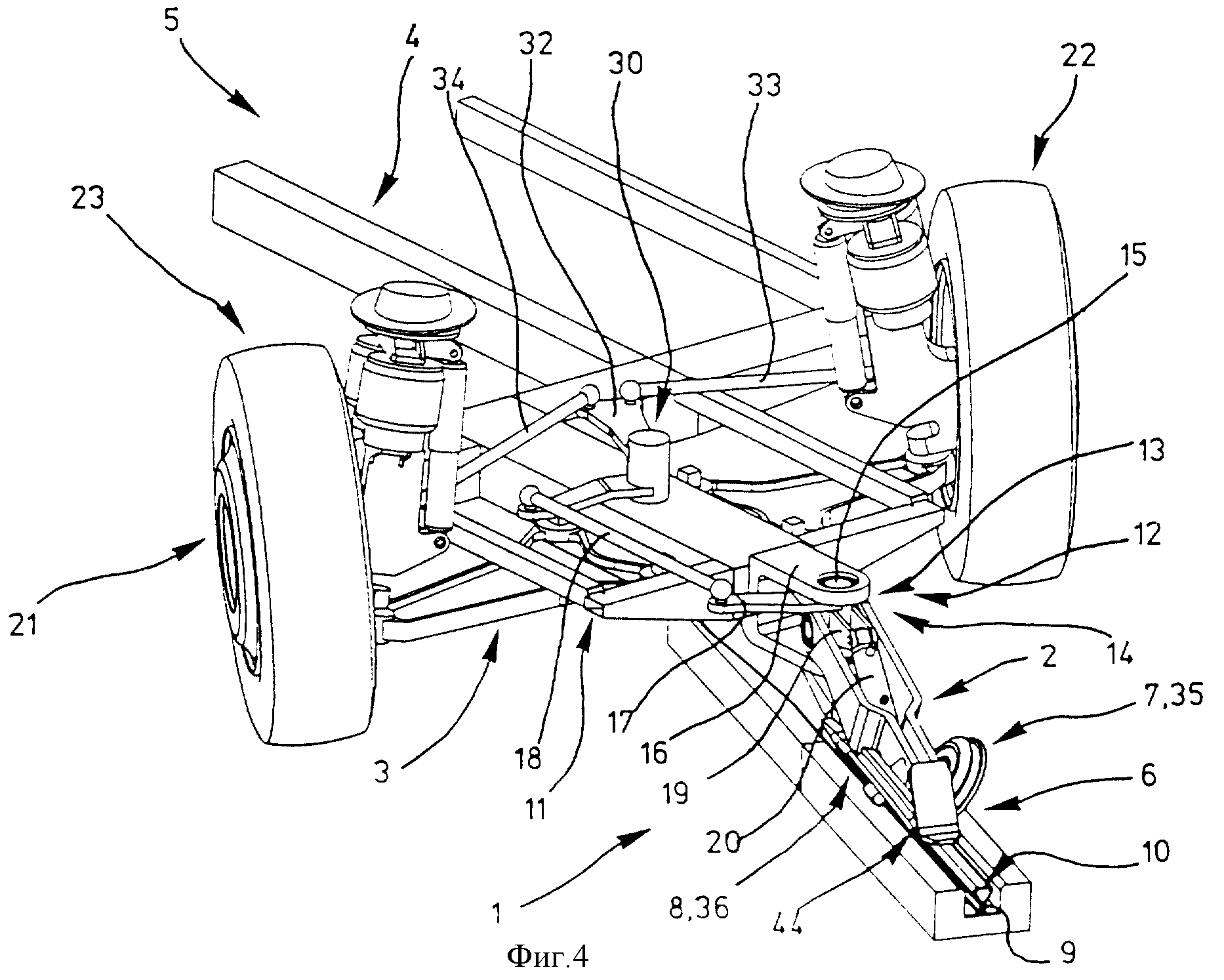
фиг. 4 представляет собой вид, соответствующий виду на фиг. 3, но в состоянии криволинейного
движения данного транспортного средства вдоль направляющего рельса;
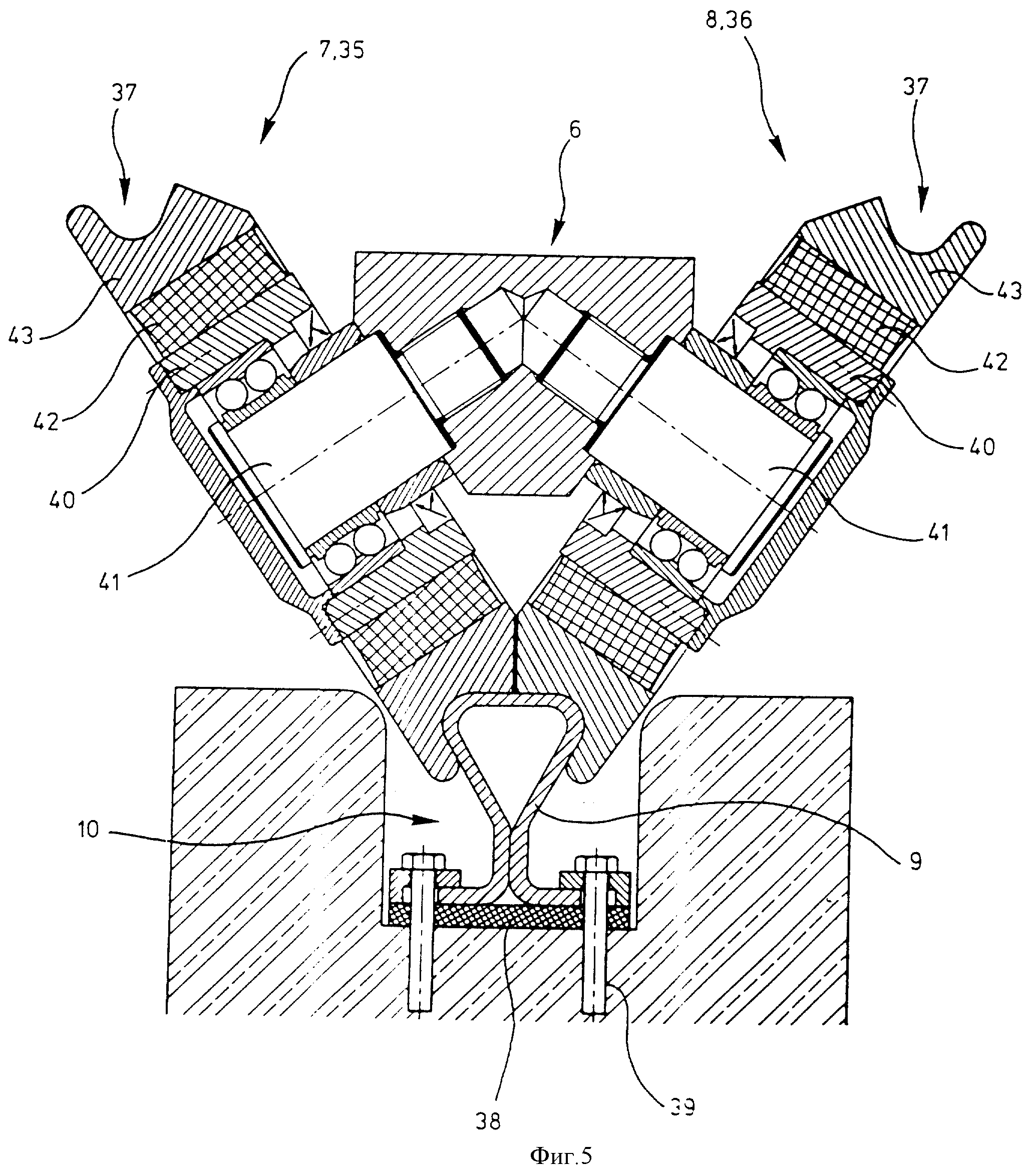
фиг. 5 представляет поперечный разрез предлагаемой направляющей системы и направляющего рельса в рабочем положении
упомянутых элементов;
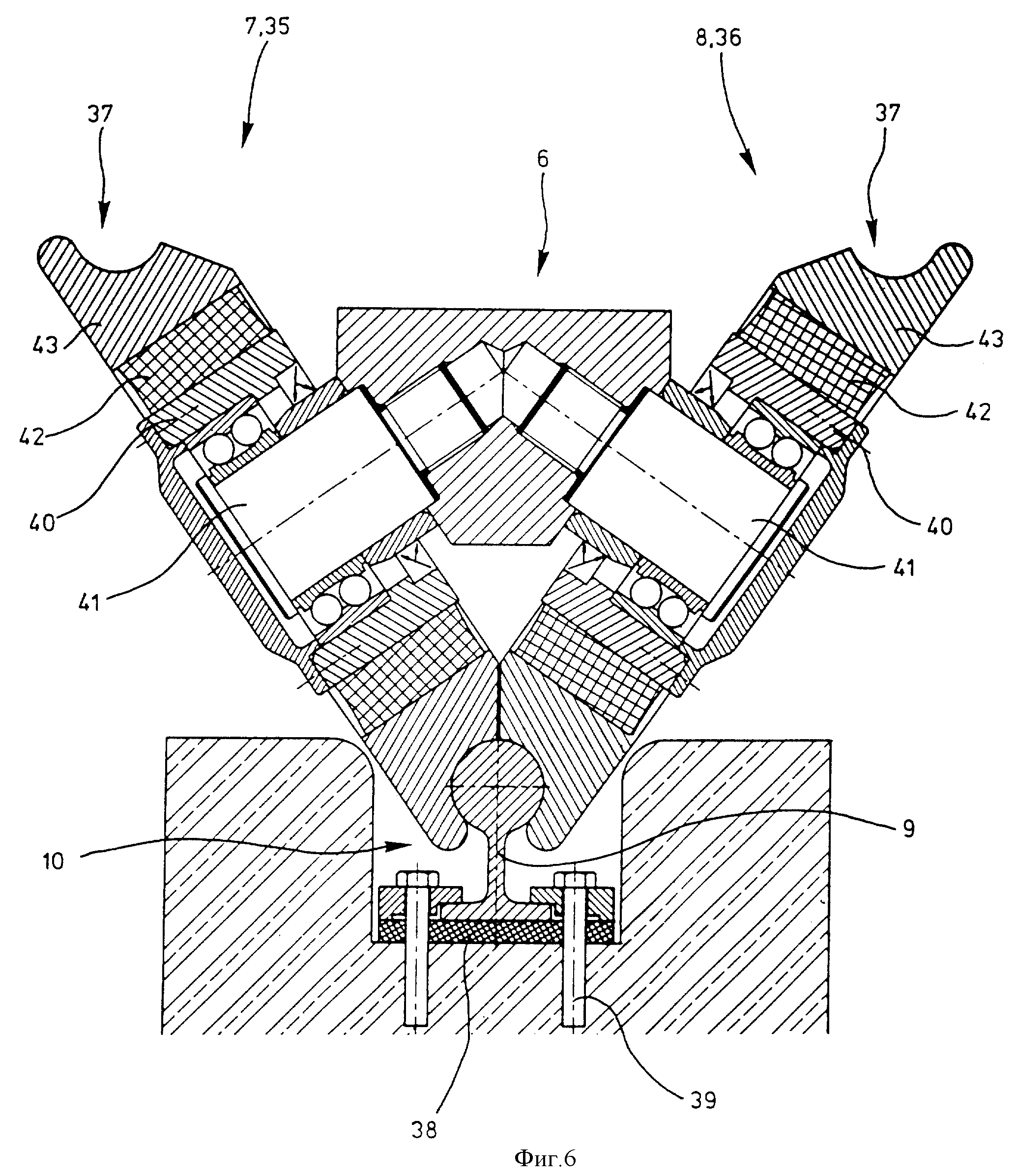
фиг. 6 представляет собой вид, аналогичный виду на фиг. 5, но в другом варианте строения поперечного профиля;
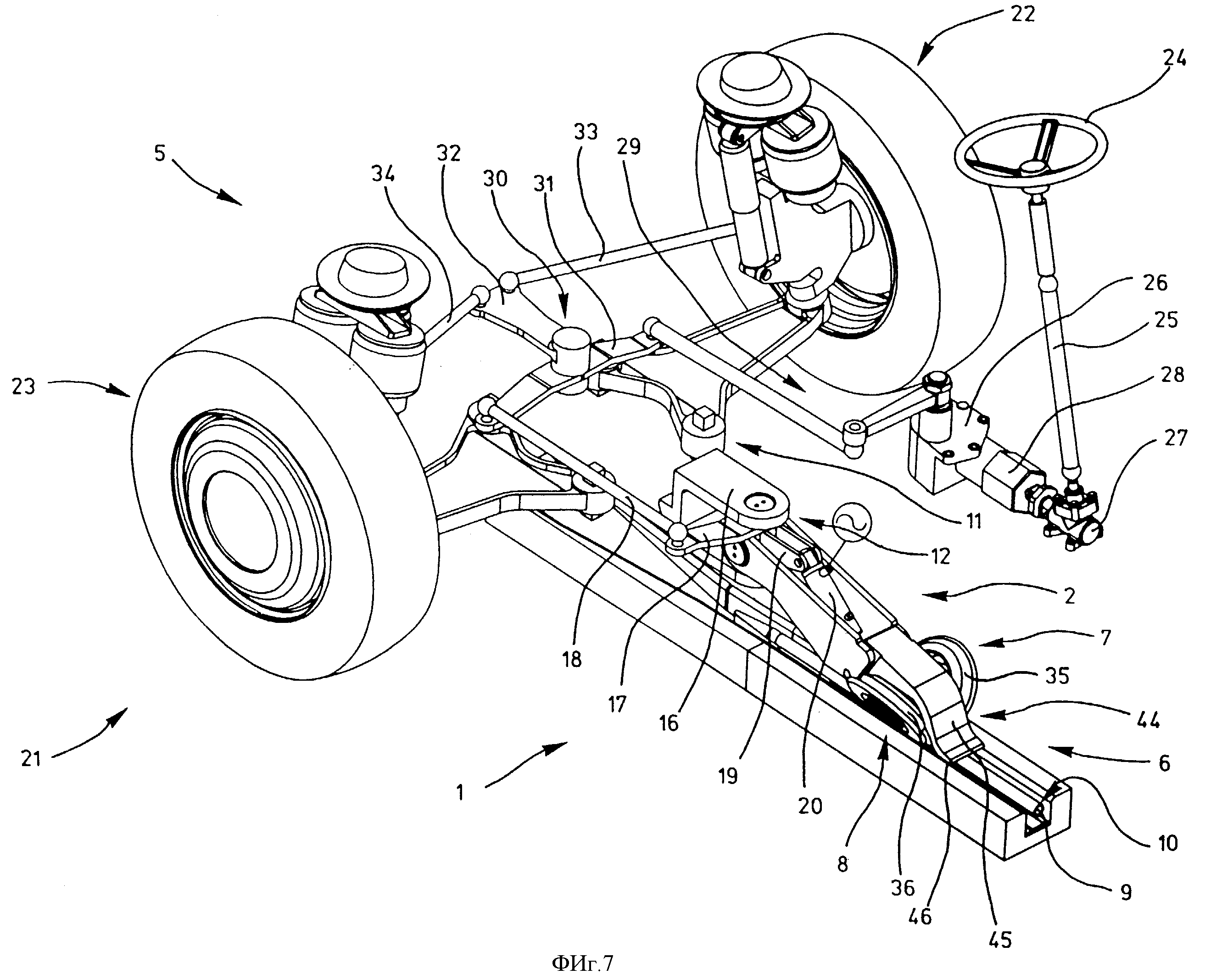
фиг. 7 представляет собой схематическую
прямоугольную диметрическую проекцию механизма рулевого управления в целом, установленного на автодорожном средстве городского транспорта;
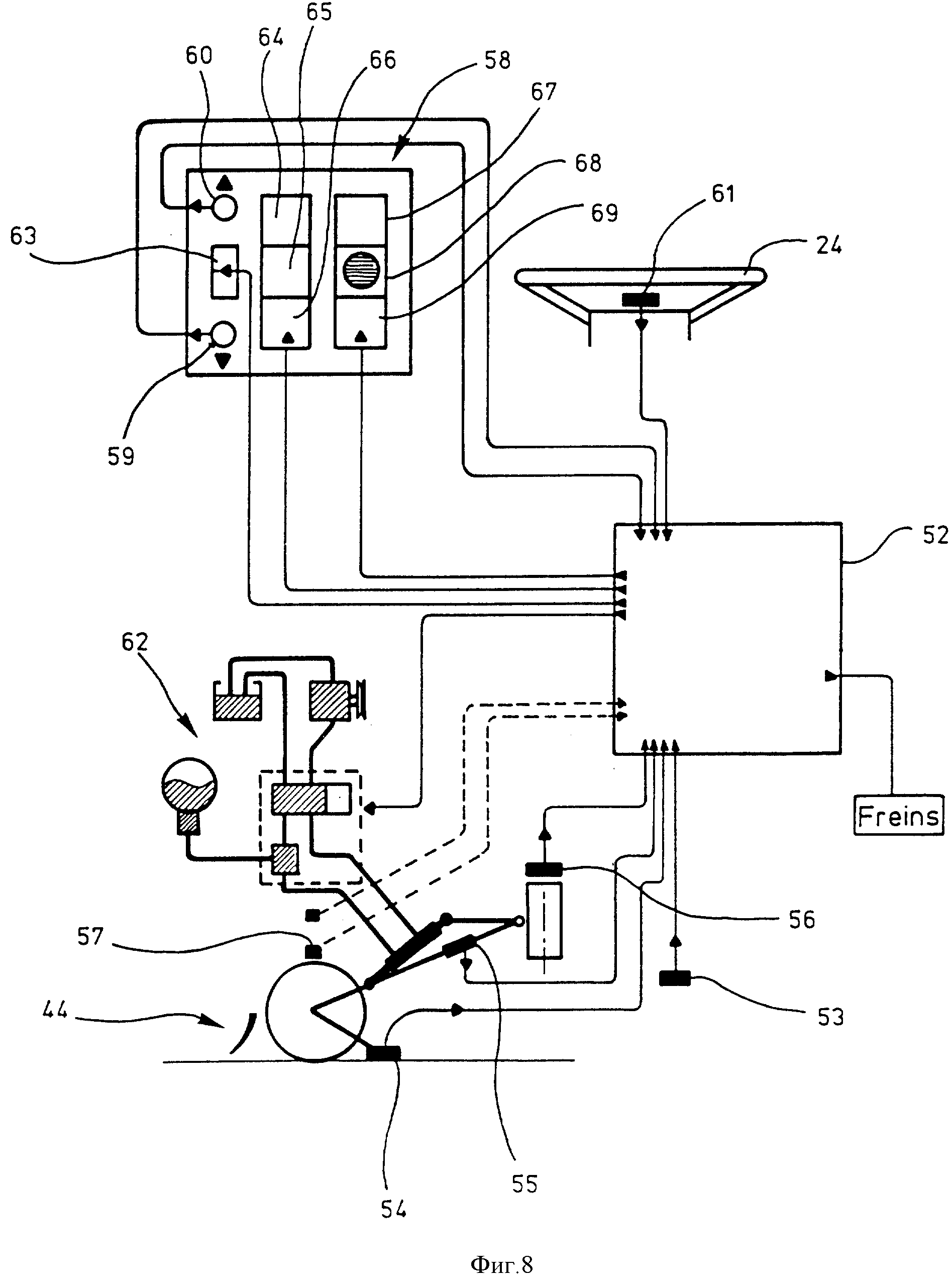
фиг. 8 представляет собой общую функциональную схему
управления транспортного средства, оборудованного монорельсовой самонаправляющей системой в соответствии с изобретением.
Общая идея предлагаемого изобретения состоит в управлении направлением движения транспортного средства автодорожного типа при помощи шарнирно соединенный с ним и поднимаемой системы, содержащей головку с двумя средствами качения, охватывающими направляющий рельс.
На приведенных в приложении фигурах самонаправляющая система, выполненная в соответствии с предлагаемым изобретением, в целом обозначена позицией 1.
Эта система содержит поднимаемый направляющий рычаг 2, смонтированный шарнирным образом на некотором концевом элементе 3 шасси 4 автодорожного транспортного средства 5, причем на приведенных чертежах показаны только элементы, существенно важные для данного изобретения. Упомянутый направляющий рычаг 2 содержит на своем переднем конце головку 6 качения, оборудованную средствами 7, 8 качения для следования по некоторому пути, выполненному в предпочтительном варианте реализации данного изобретения в виде выступающего рельса 9, то есть рельса, уложенного на дорогу или шоссе, или рельса, уложенного на дно канавки 10, устроенной на проезжей части дороги.
Говоря более конкретно, направляющий рычаг 2 смонтирован шарнирным образом на некоторой конструкции переднего конца 11 шасси данного транспортного средства при помощи шарнира, например, карданного шарнира, образованного шкворнем 13 управления и шкворнем 14 качания с перекрещивающимися осями и допускающего осуществление поворотных движений в двух перекрещивающихся плоскостях, например, вертикальной и горизонтальной.
Ось 15 шкворня 13 управления смонтирована на конце вилки 16, жестко связанной с краем шасси данного транспортного средства. Корпус шкворня 13 управления имеет в своей нижней части боковое расширение, образующее боковой рычаг 17 управления, на котором шарнирно закреплена передаточная тяга 18, а в верхней части вильчатый кронштейн, к которому одним из своих концов шарнирно прикреплен домкрат или силовой привод 20 для подъема направляющего рычага.
Качание направляющего рычага в целом осуществляется путем приведения в действие домкрата или силового привода подъема, заставляющего этот рычаг поворачиваться вокруг оси шкворня качания.
Этот направляющий рычаг предназначен для управления поворотными колесами переднего моста 21 данного транспортного средства, например, переднего моста с независимой подвеской поворотных колес 22, 23, посредством изменения их углового положения. Для этого упомянутый рычаг воздействует посредством своего рычага управления на механизм рулевого управления данного транспортного средства.
На фиг. 7 отчетливо различаются отдельные элементы, составляющие функциональную систему рулевого управления автодорожного транспортного средства, начиная с поста или рабочего места водителя и до переднего моста с независимой подвеской поворотных колес или с жесткой осью их зависимой подвески, управляемого в ручном режиме при помощи рулевого колеса 24, вращаемого водителем этого транспортного средства, или в режиме автоматического управления при помощи направляющего рычага, отслеживающего траекторию, задаваемую направляющим рельсом.
На этой фиг. 7 представлены органы, обычно используемые в конструкции механизма рулевого управления, а именно, рулевое колесо, установленное на рулевой колонке 25, регулируемой по высоте и завершающейся в картере 26 усилителя рулевого управления посредством угловой передачи 27 и следующей за ней моноэнергетической трансмиссии 28. Выходное звено картера 26 усилителя рулевого управления соединено при помощи системы 29 рулевых тяг и рычагов с центральным шкворнем 30 механизма рулевого управления. Направляющий шкворень 13, содержащий боковой рычаг 17 управления, шарнирно соединен при помощи передаточной тяги 18 с центральным шкворнем 30. Рычажно-шарнирные связи, идущие от направляющего рычага и от рулевого колеса водителя, механически соединяются по одну и по другую сторону от центрального шкворня 30 при помощи диаметральной пластины 31. Под действием ручных команд или команд автоматического управления центральный шкворень 30 механизма рулевого управления одновременно приводит в движение при помощи сектора 32 рулевую тягу левого колеса 33 и рулевую тягу 34 правого колеса.
Передние средства качения выполнены в виде пары из двух направляющих роликов 35, 36, имеющих возможность свободно вращаться на своих осях и располагающихся рядом друг с другом в одновременном плотном контакте качения с направляющим рельсом.
В соответствии с предпочтительным вариантом расположения эти направляющие ролики установлены с возможностью свободного вращения и симметрично наклонены по отношению к средней вертикальной плоскости упомянутого направляющего рычага. Такое V-образное расположение направляющих роликов дает возможность отслеживать данный рельс, непрерывно опираясь на его боковые выступы или утолщения. Постоянное удерживание рельса этой парой роликов в процессе качения исключает возможность "схода с рельса" и повышает стабильность функционирования системы.
С этой целью направляющие ролики смонтированы достаточно близко друг к другу и плотно охватывают упомянутый рельс. Небольшое отклонение, возможное в результате упругой деформации одной конструктивной детали, позволяет реализовать настоящий контакт с эффектом защемления.
Разумеется, каждый ролик имеет профиль контактного желоба 37, дополняющий с учетом наклона полупрофиль направляющего рельса. Как можно видеть на приведенных в приложении фигурах, этот направляющий рельс может иметь профиль треугольной формы (см. фиг. 3, 4, 5), круглый профиль (см. фиг. 1, 2 и 7) или профиль другой формы. Упомянутый направляющий рельс смонтирован на дне канавки или специального желоба, либо прямо на грунте, и уложен своей подошвой на специальную шумопоглощающую прокладку. Крепление направляющего рельса осуществляется фундаментными болтами 39.
Строение каждого из направляющих роликов может меняться. Этот ролик всегда будет составным, а именно, он будет содержать втулку 40, ось 41 качения, центральный коаксиальный деформируемый элемент 42, обеспечивающий вследствие своей деформации небольшое функциональное отклонение, и металлический обод 43, катящийся своей канавкой или желобом по направляющему рельсу.
Здесь следует отметить, что направляющий рычаг оборудован на своем переднем конце детектором препятствий или путеочистительным башмаком в виде отражателя 44, предназначенного для удаления небольших препятствий, которые могут загромождать проход вдоль направляющего рельса. Этот отражатель 44 может быть выполнен, например, в виде пластины 45, наклоненной по отношению к направляющему рельсу и снабженной спереди небольшим горизонтальным участком 46.
В соответствии с одним из возможных вариантов реализации упомянутая пластина отражателя имеет отверстие 47, позволяющее ей перемещаться вдоль направляющего рельса на минимально возможном расстоянии от него таким образом, чтобы наилучшим образом обеспечить удаление мелких препятствий, застрявших рядом с направляющим рельсом в его канавке.
Все участки маршрута, проходимые данным транспортным средством в режиме автоматического управления по направлению движения, начинаются зоной 48 зацепления или захвата, один из возможных вариантов реализации которой представлен схематически на фиг. 2. Эта зона зацепления или захвата содержит входную полость 49, сходящуюся к центральной части 50, завершающейся концевым наконечником 51 направляющего рельса, облегчающим захват этого рельса направляющими роликами. Завершается рельсовый участок маршрута специальной зоной выхода, которая может быть выполнена, например, аналогичным образом.
В этих зонах захвата и выхода управление движением данного транспортного средства осуществляется при помощи наружных поверхностей роликов с целью последующего выравнивания рычага вдоль конца направляющего рельса.
Функционирование системы управляется автоматом 52, достаточно совершенным для того, чтобы взять на себя принятие некоторых решений, касающихся безопасности, заменяя при этом водителя данного транспортного средства. Общая схема функционирования системы управления транспортным средством на основе упомянутого выше автомата представлена на фиг. 8.
Система автоматического управления направлением движения транспортного средства в соответствии с предлагаемым изобретением имеет в своем составе различные датчики, связанные с упомянутом автоматом и расположенные, в частности, на переднем конце направляющего рычага. Среди этих датчиков можно назвать датчик 53 скорости, датчик 54 для определения наличия или отсутствия направляющего рельса под транспортным средством, датчик 55 для определения положения направляющего рычага, датчик 56 выходящего за допустимые пределы усилия на шарнире направляющего рычага, датчик 57 выходящего за допустимые пределы усилия на управляющих роликах.
С другой стороны, упомянутый автомат имеет возможность принимать команды непосредственно от водителя.
На рабочем месте водителя предусмотрено размещение табло индикации. Это табло индикации кроме того может содержать, например, переключатели 59, 60 опускания и подъема направляющего рычага данного транспортного средства.
С другой стороны, в составе так называемой предохранительной системы "мертвого человека" на втулке рулевого колеса может быть предусмотрена специальная нажимная кнопка.
На основе информации, поступающей от упомянутых выше датчиков, и подаваемых водителем команд упомянутый выше автомат управляет функционированием гидравлического контура 62 приведенная в действие подъемника направляющего рычага, опускающего и поднимающего этот рычаг, а также осуществляет управление функциями безопасности.
Этот автомат может также управлять приведением в действие тормозов в случае превышения некоторой предельно допустимой скорости движения данного транспортного средства или в случае включения процедуры обеспечения безопасности при срабатывании так называемой системы "мертвого человека".
Режим и параметры функционирования системы автоматического управления направлением движения представляются водителю данного транспортного средства на табло индикации при помощи сигнальных ламп или светосигнализаторов, таких, например, как сигнализатор 63 режима автоматического управления направлением движения, предупреждающие сигнализаторы 64, 65 и 66, а также сигнализаторы 67, 68 и 69, относящиеся к упомянутой выше системе "мертвого человека".
Разумеется, в случае необходимости данный автомат может быть связан с системой путевой сигнализации (это техническое решение не представлено на приведенных в приложении фигурах).
Ниже будет приведено описание функционирования системы рулевого управления и автоматического управления направлением движения транспортного средства.
При использовании ручного управления направлением движения данное транспортное средство перемещается без всяких направляющих. При этом водитель крутит соответствующим образом рулевое колесо, которое посредством ручного привода и общего рулевого привода поворачивает управляемые колеса переднего моста.
В этом случае направляющий рычаг находится в верхнем положении, переводя тем самым систему автоматического управления направлением движения в нерабочее состояние, и отслеживает движения, задаваемые механизмом рулевого управления.
Из соображений безопасности направляющий рычаг не может быть опущен, даже при выдаче соответствующей команды водителем данного транспортного средства, в том случае, если скорость движения этого транспортного средства, измеренная упомянутым выше датчиком скорости, превышает некоторую предварительно заданную предельную скорость, на которой возможен безопасный и надежный захват направляющего рельса роликами рычага.
В том случае, если по неосторожности направляющий рычаг будет опущен водителем данного транспортного средства непреднамеренно вне зоны наличия направляющего рельса, например, на остановке, система безопасности, срабатывающая по отсутствию сигнала с датчика наличия этого направляющего рельса после некоторой выдержки по времени, вызовет автоматический подъем направляющего рычага.
Для перехода в режим автоматического управления движением данного транспортного средства по направлению водитель должен подвести свое транспортное средство в зону перехода, обозначаемую горизонтально расположенными средствами сигнализации, на скорости, не превышающей максимально допустимую для этого режима.
Небольшие сходящиеся боковые направляющие соответствующей формы, выполненные на проезжей части, позволяют обеспечить предварительное центрирование данного транспортного средства перед зоной захвата направляющего рельса.
При этом табло сигнализации указывает водителю, что он должен выдать команду на опускание направляющего рычага.
После этого направляющий рычаг по команде водителя опускается и оба направляющих ролика автоматически центрируются против входного наконечника направляющего рельса при помощи их наружных поверхностей, взаимодействующих с зоной захвата. Специально спроектированная сходящаяся форма зоны захвата постепенно устанавливает направляющие ролики рычага по линии расположения направляющего рельса и на входе в собственно зону направляющего рельса внутренние поверхности роликов входят в плотный контакт с поверхностью упомянутого направляющего рельса благодаря наличию на нем специального наконечника и применению в конструкции упомянутых роликов упругих средств.
Предлагаемая форма направляющего рельса, расположение и форма используемых в конструкции направляющего рычага роликов полностью исключают возможность непреднамеренного схода упомянутого рычага "с рельса".
С того момента, как датчик наличия направляющего рельса, например, угольный башмак, располагающийся позади упомянутых направляющих роликов, сигнализирует о наличии такого рельса, данное транспортное средство рассматривается как работающее в режиме автоматического управления направлением его движения.
Для предотвращения любых возможных случайностей, например, превышения предельно допустимой скорости подхода данного транспортного средства к зоне захвата, наличия недопустимого угла наклона направляющего рычага, запоздалого опускания этого рычага и т.п., могущих неблагоприятным образом повлиять на осуществление процесса захвата направляющего рельса роликами направляющего рычага, предусматривается наличие второй зоны захвата аналогичной конструкции, располагающейся на некотором расстоянии от основной зоны захвата направляющего рельса.
В том случае, когда водитель данного транспортного средства не обеспечил необходимых условий для первого захвата направляющего рельса, им может быть осуществлена вторая попытка в этой второй зоне захвата при использовании аналогичной процедуры.
В том случае, когда в конструкции упомянутой системы автоматического управления направлением движения транспортного средства в соответствии с предлагаемым изобретением предусматривается наличие так называемой системы "мертвого человека", вождение в режиме автоматического управления осуществляется обычным образом до тех пор, пока эта система "мертвого человека" не выявит каких-либо ошибок в вождении данного транспортного средства.
Если упомянутая система "мертвого человека" выявляет ту или иную ошибку вождения, автомат управления включает режим осуществления запрограммированной остановки.
В предлагаемую систему автоматического управления направлением движения транспортного средства может быть установлена и другая система безопасности. Речь идет о системе выявления любых превышающих предельно допустимые значения усилий на направляющем рычаге, вызываемые, например, наличием деформации направляющего рельса или его блокированием тем или иным предметом или камнем.
В этом случае специальный датчик, установленный на горизонтальной оси направляющего рычага, выявляет усилие, превышающее некоторое предельно допустимое значение. При получении такого сигнала от упомянутого выше датчика автомат управления системой включает процедуру освобождения или выхода направляющего рычага из зацепления с направляющим рельсом.
При этом к направляющему рычагу со стороны упомянутого выше подъемника или силового привода прикладывается достаточно большое усилие для того, чтобы высвободить ролики из зацепления с направляющим рельсом в результате деформации их упругих средств и перевести систему автоматического управления направлением движения в нерабочее состояние.
Специальный звуковой сигнал предупреждает водителя данного транспортного средства о том, что он должен немедленно взять управление направлением движения на себя и выполнить предусмотренные инструкцией операции.
На выходе из зоны автоматического управления направлением движения данного транспортного средства предусмотрена специальная зона выхода или расцепления, где еще происходит автоматическое управление, а затем, после того, как упомянутый датчик наличия направляющего рельса выявит конец этого рельса, автомат управления выдает команду на уборку или складывание системы автоматического управления. При этом данное транспортное средство оказывается в режиме ручного управления направлением его движения.
Реферат
Изобретение относится к системам автоматического управления направлением движения транспортного средства вдоль одного направляющего рельса. Система содержит направляющий рычаг 2, шарнирно соединенный при помощи карданного шарнира с концом 3 шасси этого транспортного средства. Упомянутый направляющий рычаг 2 имеет на своем переднем конце средства качения 7, 8 по направляющему рельсу 9 в виде пары из двух роликов V-образного расположения, охватывающих и обжимающих направляющий рельс 9 с боков своими поверхностями качения. Кроме того, в предлагаемой системе предусмотрены средства подъема упомянутого направляющего рычага, механическая связь с рулевым управлением данного транспортного средства и различные датчики. Данное изобретение представляет особенный интерес для конструирования средств городского общественного транспорта, поскольку применимо на трассах, имеющих участки с автоматическим управлением направлением движения с зацеплением упомянутых роликов с направляющим рельсом и участки с обычным ручным управлением движением данного транспортного средства при помощи рулевого колеса этого транспортного средства. 7 з.п.ф-лы, 8 ил.
Комментарии