Гидравлическая система рулевого управления с двумя органами рулевого управления и содержащее ее транспортное средство - RU2493995C2
Код документа: RU2493995C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к гидравлическим системам рулевого управления, содержащим первый и второй органы рулевого управления, и к транспортным средствам, содержащим гидравлическую систему рулевого управления в соответствии с ограничительными частями независимых пунктов формулы изобретения.
Уровень техники
Рабочие машины, к которым относится строительное оборудование или строительные транспортные средства, например, экскаваторы или колесные автопогрузчики, представляют собой транспортные средства, предназначенные для использования и используемые на пересеченной местности, где не могут проехать обычные грузовые или пассажирские автомобили, или же если они все-таки будут двигаться в таких условиях, то скорее всего получат повреждения.
Обычно такие рабочие машины снабжаются рулевым колесом и дополнительной ручкой (типа джойстика), которая обеспечивает управление направлением движения в соответствии с логикой "включено"/"выключено". Обычно ручка управления используется для управления рабочим орудием, например, ковшом экскаватора, и устройство рулевого управления устанавливается на ручке управления для обеспечения поворота колес экскаватора.
В патенте US 6,408,977 В1 раскрывается способ рулевого управления передними колесами самоходной рабочей машины. К устройству рулевого управления на дополнительной ручке управления подсоединяется обычное рулевое колесо. Управление с помощью устройства рулевого управления на ручке управления невозможно, когда поворачивается рулевое колесо. В описанном способе используется датчик давления, который формирует выходной сигнал в зависимости от использования рулевого колеса, и этот сигнал запрещает (не допускает) использование устройства рулевого управления на ручке управления. Кроме того, если рулевое колесо не поворачивается, но рабочая машина двигается вперед со скоростью, которая превышает определенное пороговое значение (например, при движении по дороге), использование рулевого управления с помощью ручки управления также запрещается.
Раскрытие изобретения
Целью настоящего изобретения является создание гидравлической системы рулевого управления для транспортного средства, которая обеспечивает повышение удобства оператора и безопасности выполняемых работ. Другой целью изобретения является создание соответствующего способа, который позволяет легко и удобно работать с гидравлической системой рулевого управления транспортного средства.
Указанные цели изобретения достигаются с использованием признаков независимых пунктов формулы изобретения. Другие пункты формулы изобретения и описание раскрывают предпочтительные варианты осуществления изобретения.
В изобретении предлагается гидравлическая система рулевого управления для транспортного средства, содержащая первый орган рулевого управления и второй орган рулевого управления, причем первый орган рулевого управления функционально соединяется с первым клапанным узлом рулевого управления, содержащим первый клапан рулевого управления, и поток гидравлической рабочей среды, подаваемый в один или несколько цилиндров рулевого управления, которые обеспечивают поворот транспортного средства в нужном направлении, регулируется приоритетным клапаном, реализующим приоритет управления первым органом рулевого управления по сравнению со вторым органом рулевого управления в том случае, когда задействован первый орган рулевого управления.
В системе обеспечивается второй клапан рулевого управления, который может работать последовательно с пропорциональным клапаном регулирования потока, причем управление вторым клапаном рулевого управления и/или пропорциональным клапаном регулирования потока осуществляется вторым органом рулевого управления. Предпочтительно такое управление осуществляется с помощью электрического сигнала, гидравлического управляющего сигнала или электромагнитного сигнала.
В предпочтительном варианте управление вторым клапаном рулевого управления осуществляется с помощью первого управляющего сигнала, и управление пропорциональным клапаном регулирования потока осуществляется с помощью второго управляющего сигнала, представляющего собой электрический выходной сигнал второго органа рулевого управления, соответствующего приведению его в действие. Выходной сигнал второго органа рулевого управления может использоваться в качестве входного сигнала электронного блока управления, который будет формировать два управляющих сигнала для передачи в пропорциональный клапан регулирования потока и во второй клапан рулевого управления.
В частности, настоящее изобретение может применяться для целей управления элементами, взаимодействующими с поверхностью земли, рабочей машины, например, передними или задними элементами, взаимодействующими с поверхностью земли, или всеми такими элементами. Элементами, взаимодействующими с поверхностью земли, могут быть колеса, гусеницы и другие, им подобные, устройства. Управление передними и задними колесами экскаватора может осуществляться одновременно согласованным образом при повороте рулевого колеса или при перемещении ручки управления. Следует отметить, что рулевое управление гусеничными рабочими машинами отличается от управления колесными рабочими машинами тем, что, например, левая гусеница двигается против часовой стрелки, в то время как правая гусеница двигается по часовой стрелке (или наоборот), или же когда одна гусеница двигается, другая в это время заблокирована. Самоходная рабочая машина может быть экскаватором.
Первым органом рулевого управления может быть, например, рулевое колесо, и вторым органом управления может быть кнопочный переключатель на ручке управления (джойстике). Рулевое управление с помощью джойстика может использоваться в дополнение к обычному рулевому управлению, осуществляемому с помощью первого органа рулевого управления, например, с помощью рулевого колеса. Однако первым органом управления может быть также ручка управления, ползунок или аналогичное устройство. Настоящее изобретение позволяет улучшить управление и повысить удобство работы оператора, а также повысить безопасность и степень контролируемости функции рулевого управления рабочей машины.
В предпочтительном варианте первый управляющий сигнал представляет собой сигнал типа "включено"/"выключено", который может быть подан на второй клапан рулевого управления в соответствии с направлением поворота, задаваемым вторым органом рулевого управления. В частности, клапан может иметь 3 положения "включение левого поворота", "включение правого поворота" и "выключение левого и правого поворота", которые в более сокращенной форме могут быть записаны как "Вкл. левый", "Вкл. правый" или "Выкл.". Второй сигнал управления может быть сигналом широтно-импульсной модуляции, сигналом частотно-импульсной модуляции или сигналом модуляции по крутизне фронта импульса, который может быть подан на пропорциональный клапан регулирования потока в соответствии с управлением характеристикой поворота (рулевой характеристикой) вторым органом рулевого управления.
В предпочтительном варианте управление двумя клапанами может осуществляться с помощью двух разных электрических сигналов, сформированных из одного сигнала, например, вырабатываемого при приведении в действие второго органа рулевого управления. Второй орган рулевого управления может быть движком, колесиком, кнопочным переключателем (типа "мини-джойстик"), которые могут приводиться в действие большим пальцем оператора. Второй орган управления может быть самоцентрирующимся устройством, которое возвращается в нейтральное положение, когда этот орган управления не задействован (не используется).
В соответствии с другими вариантами второй клапан рулевого управления и пропорциональный клапан регулирования потока могут быть соединены последовательно в отношении потока гидравлической рабочей среды. Пропорциональный клапан регулирования потока может быть расположен между вторым клапаном рулевого управления и гидравлическим насосом, обеспечивающим давление в гидравлической системе.
Второй клапан рулевого управления может быть известным клапаном типа 4/3, что означает, что он имеет 4 прохода для гидравлической рабочей среды и 3 положения. Управление вторым клапаном рулевого управления может осуществляться с помощью одного или нескольких соленоидов, которые обеспечивают перевод клапана в различные положения.
Пропорциональный клапан регулирования потока регулирует величину потока гидравлической рабочей среды, который подается в цилиндры рулевого управления транспортного средства, и управление этим клапаном может осуществляться электронным блоком управления, который обеспечивает различные возможные характеристики управления, такие как агрессивный стиль, плавное управление, линейное и нелинейное управление и другие типы рулевого управления в соответствии с работой второго органа рулевого управления. Например, если второй орган рулевого управления представляет собой ползунок, сдвигаемый пальцем оператора, то характеристика управления поворотом может быть плавной, или резкой (агрессивной), или линейной и т.п. в ответ на перемещение движка.
Совместное использование второго клапана рулевого управления и пропорционального клапана регулирования потока, соединенных последовательно, обеспечивает дополнительную безопасность. Поскольку управление обоими клапанами осуществляется с помощью сигналов разного типа, например, сигнал "включено"/"выключено" в случае второго органа рулевого управления и сигнал широтно-импульсной модуляции в случае пропорционального клапана регулирования потока, то опасность серьезного отказа значительно снижается при предпочтительном последовательном соединении этих клапанов и управлении ими с помощью электрических сигналов. Кроме того, отказоустойчивая конструкция клапанов и логических схем управления ими будет еще больше снижать риск отказа системы, поскольку в этом случае при отказе клапана будет блокироваться проходящий через него поток гидравлической рабочей среды.
В предпочтительном варианте клапан рулевого управления и пропорциональный клапан регулирования потока могут формировать клапанный узел, который включается параллельно первому клапанному узлу рулевого управления, реагирующему на управляющее действие первого органа рулевого управления. Однако также возможны варианты, в которых они располагаются раздельно в разных клапанных узлах. Важно, чтобы эти два клапана функционально работали последовательно, независимо от места их физического размещения в гидравлической системе транспортного средства.
Второй орган рулевого управления предпочтительно встраивается в ручку управления. В предпочтительном варианте второй орган рулевого управления может представлять собой ползунок, колесико, кнопочный переключатель, предпочтительно устанавливается на верхней части ручки управления и может приводиться в действие большим пальцем оператора. Ручка управления может использоваться для управления орудием, присоединенным к транспортному средству, например, ковшом экскаватора. Таким образом, оператор может осуществлять очень точное управление поворотом транспортного средства при использовании рабочего орудия.
В предлагаемой гидравлической системе используется датчик давления, присоединенный к магистральной гидравлической линии между приоритетным клапаном и первым клапанным узлом рулевого управления, причем выход датчика давления подключен ко второму органу управления с возможностью управления активацией второго органа рулевого управления в зависимости от выходного сигнала датчика давления.
Дополнительно к первому датчику давления или вместо него в предлагаемой гидравлической системе используется второй датчик давления, присоединенный к магистральной гидравлической линии между приоритетным клапаном и первым клапанным узлом рулевого управления, причем выход датчика давления подключен ко второму органу управления с возможностью регулирования управляющих сигналов, подаваемых на второй орган рулевого управления и/или пропорциональный клапан регулирования потока, в зависимости от текущего выходного сигнала этого второго датчика давления.
Первый датчик давления может формировать выходной сигнал, который может подаваться на аналоговый вход электронного блока управления, осуществляющего управление приоритетным клапаном. Давление в магистральной гидравлической линии увеличивается в зависимости от перемещения первого органа рулевого управления. Если первый орган рулевого управления не используется, давление в магистральной гидравлической линии низкое, например, равно давлению в резервуаре гидравлической рабочей среды. Поэтому выходной сигнал первого датчика давления может использоваться для отключения электрических сигналов от второго клапана рулевого управления и пропорционального клапана регулирования потока, когда задействован первый орган рулевого управления, и выходной сигнал первого датчика давления изменяется соответствующим образом, обеспечивая, таким образом, дополнительный приоритет первому органу рулевого управления. Это может реализовываться в качестве дополнительного элемента безопасности в программе управления транспортного средства.
Может использоваться также механическая блокировка или запрет действия второго органа рулевого управления, когда используется первый орган рулевого управления, однако обычно это необязательно.
Кроме того, запрет действия второго органа рулевого управления с помощью электрического сигнала также осуществляется, когда транспортное средство находится в режиме работы, в котором оно может двигаться со скоростью, превышающей определенное (заданное) предельное значение скорости, например, при движении по дороге общего пользования.
Одно из достоинств изобретения заключается в том, что система является гибкой и может изменять выполняемые функции без необходимости вносить серьезные изменения в конструкцию механических компонентов.
Используя одно и то же оборудование, а именно, второй клапанный узел рулевого управления, изобретение обеспечивает два разных рабочих режима. Как уже указывалось, в соответствии с первым рабочим режимом второй орган рулевого управления и второй клапанный узел рулевого управления могут использоваться для поворота элементов, взаимодействующих с поверхностью земли, рабочей машины, когда первый орган рулевого управления не задействован.
Во втором рабочем режиме второй клапан рулевого управления действует в качестве сервопривода первого органа рулевого управления. В этом предпочтительном альтернативном варианте использования второго клапанного узла рулевого управления выходной сигнал первого и/или второго датчика давления может использоваться для регулирования электрического сигнала управления вторым клапаном рулевого управления и пропорциональным клапаном регулирования потока, чтобы изменять реакцию цилиндра рулевого управления путем добавления части всего перепускаемого потока гидравлической рабочей среды в нормальный поток гидравлической рабочей среды, который может обеспечить приоритетный клапан для той же самой величины давления в магистральной гидравлической линии. Этот признак может рассматриваться как автоматическое изменение (функция сервопривода) перемещения органа рулевого управления, обеспечивающая изменение необходимого числа оборотов рулевого колеса для перемещения цилиндра рулевого управления из одного крайнего положения в другое. В том случае, когда для этой цели используется первый или второй датчик давления, второй клапанный узел рулевого управления не будет отключаться, когда задействован первый орган управления. В этом случае будет целесообразно использовать датчик направления поворота, который определяет направление поворота первого органа управления, а именно, должно ли транспортное средство быть развернуто налево или направо.
Для различения двух альтернативных рабочих режима в соответствии с изобретением второй рабочий режим может быть реализован с возможностью его задания оператором, например, с помощью переключателя, рычажка или другого аналогичного устройства, или же блок управления транспортным средством просто может распознавать наличие датчика направления поворота или нахождение его в активном рабочем состоянии. Такой датчик направления поворота может присутствовать, однако необязательно для вышеупомянутого первого альтернативного рабочего режима. Второй клапанный узел рулевого управления может использоваться в этих двух альтернативных режимах с одним и тем же оборудованием, что безусловно относится к достоинствам изобретения.
В предпочтительном варианте для управления вторым клапаном рулевого управления и/или пропорциональным клапаном регулирования потока обеспечивается электронный блок управления.
В изобретении также предлагается способ управления гидравлической системой рулевого управления для транспортного средства, содержащей первый орган рулевого управления, функционально соединенный с первым клапанным узлом рулевого управления, и второй орган рулевого управления, причем поток гидравлической рабочей среды, подаваемый в один или несколько цилиндров рулевого управления, которые обеспечивают поворот транспортного средства в нужном направлении, регулируется приоритетным клапаном, реализующим приоритет управления первым органом рулевого управления по сравнению со вторым органом рулевого управления, когда задействован первый орган рулевого управления.
В системе используется второй клапан рулевого управления, который может работать последовательно с пропорциональным клапаном регулирования потока, причем управление вторым клапаном рулевого управления и/или пропорциональным клапаном регулирования потока осуществляется вторым органом рулевого управления.
Предпочтительно такое управление осуществляется с помощью электрического сигнала, гидравлического управляющего сигнала или электромагнитного сигнала.
В предпочтительном варианте из электрического выходного сигнала, соответствующего работе второго органа рулевого управления, извлекается первый и второй управляющие сигналы, с помощью которых осуществляется управление вторым клапаном рулевого управления и пропорциональным клапаном регулирования потока, соответственно, причем оба клапана реагируют на действие второго органа рулевого управления.
Настоящее изобретение относится, в частности, к способу скоординированного поворота передних и или задних колес колесного экскаватора, как это известно в технике, с использованием управляющего органа на ручке управления. Управление поворотом с помощью ручки управления (джойстика) осуществляется в дополнение к нормальному управлению с помощью рулевого колеса.
Управление вторым клапаном рулевого управления может осуществляться сигналом "включено"/"выключено" (в частности, "включение левого поворота", "включение правого поворота", "выключение") для поворота транспортного средства в нужном направлении. Управление пропорциональным клапаном регулирования потока может осуществляться с помощью сигнала широтно-импульсной модуляции для управления рулевой характеристикой. Также могут использоваться и другие типы модуляции сигналов: частотно-импульсная модуляция и модуляция по крутизне фронта импульса.
В соответствии с первым рабочим режимом, если обнаружено управляющее перемещение первого органа рулевого управления, то давление в магистральной гидравлической линии между вторым клапаном рулевого управления и пропорциональным клапаном регулирования потока увеличивается. В соответствии с этим увеличением давления приоритетный клапан направляет часть потока гидравлической рабочей среды, которая определяется по меньшей мере сигналом давления в магистральной гидравлической линии, в первый клапан рулевого управления, в результате чего обеспечивается управление, например, колесами экскаватора с помощью первого органа рулевого управления. В предпочтительном варианте в качестве приоритетного клапана рулевого управления используется пропорциональный клапан. Выход клапана пропорционален задающему сигналу из первого клапана рулевого управления.
Второй клапанный узел рулевого управления отключается с помощью электрического сигнала, если давление в магистральной гидравлической линии равно заданной предельной величине или превышает ее.
Эти две особенности обеспечивают приоритет действия первого органа рулевого управления.
Если первый орган рулевого управления не используется, и при этом обнаруживается управляющее действие второго органа рулевого управления, то может быть включен второй клапанный узел рулевого управления, причем одновременно осуществляется управление вторым клапаном рулевого управления для обеспечения нужного направления поворота, указанного управляющим действием второго органа рулевого управления.
В предпочтительном варианте управление поворотом транспортного средства во втором рабочем режиме и его скорость связаны между собой. В зависимости от исходной ситуации, если второй рабочий режим задается на низкой передаче трансмиссии транспортного средства, для которой допустимо использование второго рабочего режим, то будет невозможно переключиться на более высокую передачу, для которой не разрешается использование второго рабочего режима, в результате чего эффективно ограничивается возможная скорость движения транспортного средства, поскольку если транспортное средство двигается со скоростью превышающей определенную предельную величину (или если включена передача, на которой возможно движение на такой высокой скорости), то второй рабочий режим не может быть задан. Таким образом, скорость движения транспортного средства автоматически ограничивается скоростями, не превышающими определенной верхней предельной величины, при задании режима управления, в котором используется второй орган рулевого управления. Таким образом, исключается возможность задания скорости движения транспортного средства, которая превышает определенную предельную величину скорости, одновременно с режимом управления, в котором используется второй орган рулевого управления.
Безопасность работы транспортного средства может быть улучшена, если выполняется по меньшей мере одно из нижеуказанных условий:
- высокая скорость движения транспортного средства, превышающая пороговое значение, запрещает задание режима рулевого управления, в котором используется второй орган рулевого управления;
- задание режима рулевого управления, в котором используется второй орган рулевого управления, запрещает достижение высокой скорости движения транспортного средства, превышающей пороговое значение;
- задание передачи, не совместимой с режимом рулевого управления, в котором используется второй орган рулевого управления, запрещает задание такого режима;
- задание режима рулевого управления, в котором используется второй орган рулевого управления, запрещает задание передачи, не совместимой с таким режимом.
Изобретение может использоваться предпочтительно в любом транспортном средстве или в строительном оборудовании, содержащем гидравлическое рулевое управление. В особенности изобретение подходит для использования в рабочих машинах, таких как колесные экскаваторы.
Настоящее изобретение в особенности подходит для применения в транспортных средствах, в частности в строительном оборудовании, в котором а) поворачиваются либо передние, либо задние колеса, или скоординированным образом поворачиваются вместе передние и задние колеса, аналогично тому, как это происходит в колесных экскаваторах, или левые и правые гусеницы гусеничных экскаваторов и т.п., или б) транспортное средство или строительное оборудование представляет собой шарнирно-сочлененную машину, такую как колесный автопогрузчик или шарнирно-сочлененный самосвал, колеса которого не поворачиваются.
Настоящее изобретение позволяет повысить удобство работы оператора по управлению самоходной рабочей машиной путем обеспечения его средствами рулевого управления, которые удобны в использовании, обеспечивают плавное и пропорциональное регулирование скорости поворота, повышают безопасность работы путем обеспечения диагностических возможностей для устройства, обеспечивающего приоритетность в рулевом управлении, и обеспечивают дополнительные особенности и функциональные возможности путем использования электронного блока управления и электронного управления пропорциональным клапаном регулирования потока гидравлической рабочей среды дополнительно ко второму клапану рулевого управления.
Краткое описание чертежей
Настоящее изобретение вместе с вышеупомянутыми и другими его целями и достоинствами можно будет лучше всего понять из нижеприведенного подробного описания вариантов осуществления изобретения, которые не ограничивают его объем, со ссылками на чертежи, на которых показано:
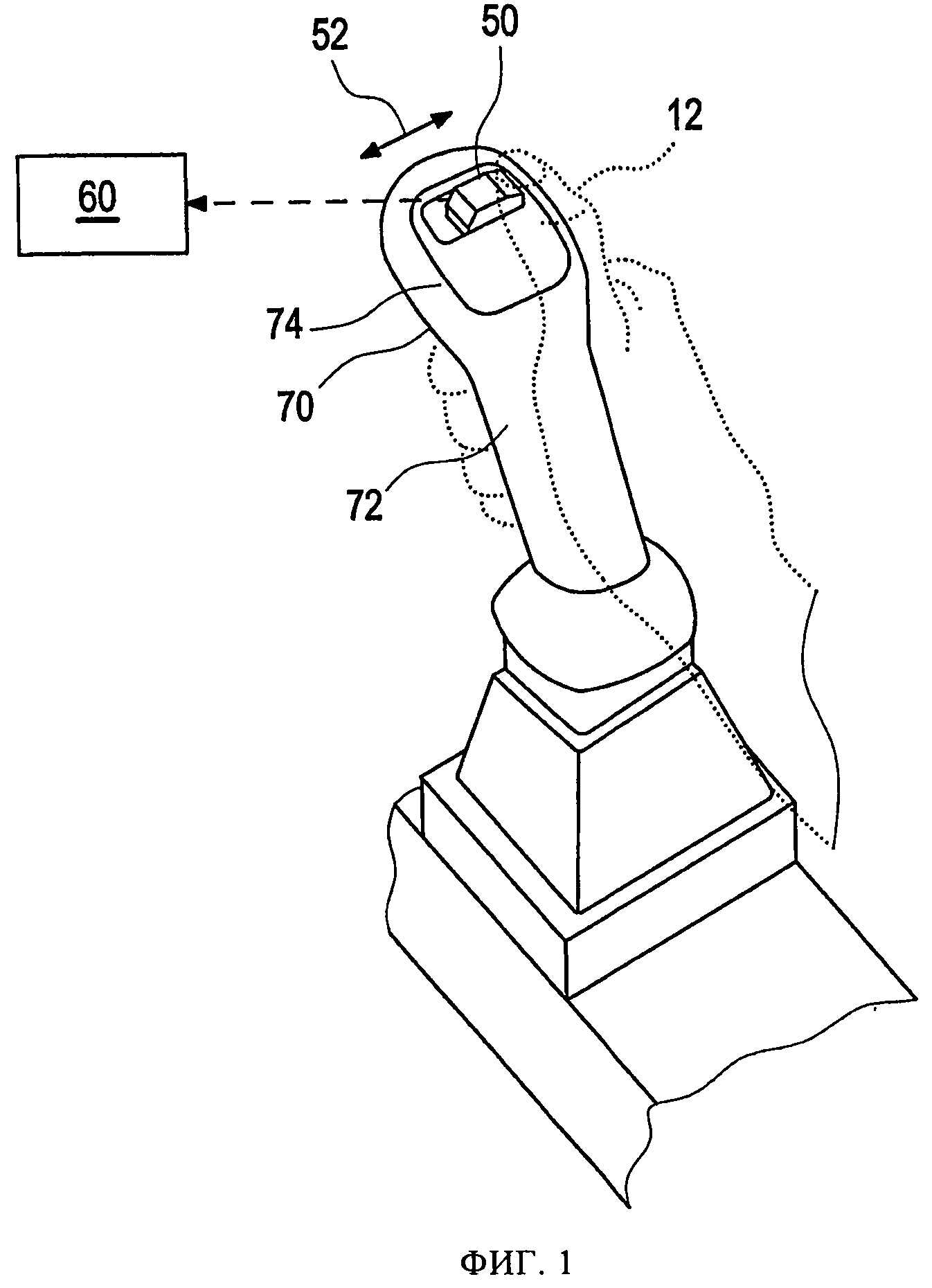
на фиг.1 - вид в перспективе ручки управления (джойстика), содержащей второй орган рулевого управления в соответствии с предпочтительным вариантом осуществления изобретения;
на фиг.2 - схема предпочтительного варианта гидравлической системы, встроенной в транспортное средство по настоящему изобретению;
на фиг.3 - блок-схема алгоритма, иллюстрирующая действие включения и отключения второго органа рулевого управления по настоящему изобретению;
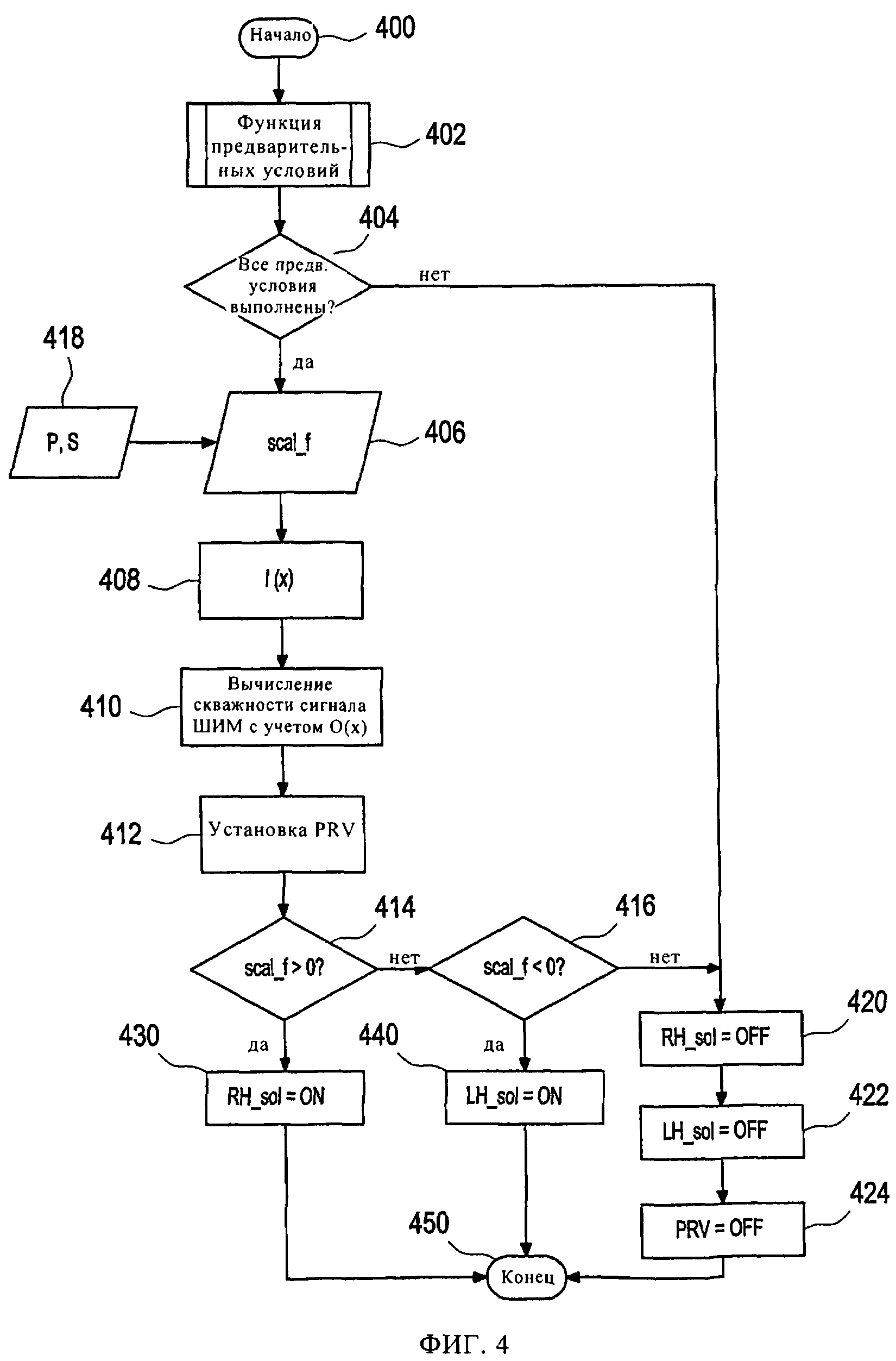
на фиг.4 - блок-схема алгоритма, иллюстрирующая изменение управляющего действия первого органа рулевого управления, вызываемое вторым органом управления, по настоящему изобретению.
Осуществление изобретения
Одинаковые или сходные элементы указываются на чертежах одинаковыми ссылочными номерами. Чертежи являются всего лишь схематическими иллюстрациями, не предназначенными для точного отображения конкретных характеристик изобретения. Кроме того, чертежи предназначены для представления только типичных вариантов осуществления изобретения и поэтому не должны рассматриваться как ограничивающие объем изобретения.
На фиг.1 показана в перспективе ручка 70 управления, содержащая орган 50 рулевого управления для управления поворотом транспортного средства (указано 210 на фиг.2), таким как самоходная рабочая машина, по предпочтительному варианту осуществления изобретения. Транспортное средство 210 снабжено элементами, взаимодействующими с поверхностью земли, которые в рассматриваемых ниже вариантах представляют собой колеса, но также могут быть гусеницами и им подобными элементами, и транспортное средство в рассматриваемом ниже варианте является колесным экскаватором.
Управление элементами, взаимодействующими с поверхностью земли, транспортного средства осуществляется с помощью первого органа рулевого управления (элемент 10 рулевого управления на фиг.2), который в нижеприведенном варианте указывается как рулевое колесо 10, но может быть также ручкой управления, движком или им подобным устройством, воздействующим на первый клапанный узел (указан 30 на фиг.2). Кроме того, на транспортном средстве имеется второй орган 50 рулевого управления, который может быть установлен, например, на ручке 70 управления (см. фиг.1). Второй орган 50 рулевого управления обеспечивается дополнительно к первому органу 10 рулевого управления (фиг.2), который имеет более высокий приоритет в управлении элементами, взаимодействующими с поверхностью земли, по сравнению со вторым органом 50 рулевого управления. Это означает, что только в том случае, когда рулевое колесо 10 не поворачивается активно оператором, колесами экскаватора можно управлять с помощью второго органа 50 рулевого управления.
Текущее положение первого органа 10 рулевого управления, например, рулевого колеса, не влияет на работу системы в соответствии с настоящим изобретением, поскольку первый клапанный узел 30 рулевого управления не вызывает поворота рулевого колеса (тип рулевого устройства "без обратной связи"). В первом рабочем режиме в соответствии с изобретением второй орган 50 рулевого управления может управлять элементами, взаимодействующими с поверхностью земли, только в том случае, если первый орган 10 рулевого управления не используется оператором.
Таким образом, в предварительных условиях, описанных ниже в отношении фиг.3 и 4, транспортное средство 210 (см. фиг.2) предпочтительно может переключаться на управление с помощью второго органа 50 рулевого управления (и в предпочтительном варианте осуществления изобретения на управление с помощью клапанного узла 100 рулевого управления (фиг.2)) только в том случае, когда транспортное средство 210 находится в режиме, когда это действие разрешается, например, рабочий режим/пользовательский режим, и не разрешается в другом режиме, таком как режим движения, используемый для вождения транспортного средства 210 по дорогам общего пользования. Другое предпочтительное предварительное условие (фиг.3, 4) заключается в том, что на транспортном средстве 210 не включена передача для движения по дороге, позволяющая ему превышать пороговое значение скорости, например, 9 км/час. Если оператор использует второй орган 50 рулевого управления и переключается на более высокую передачу (до 35 км/час), то транспортное средство 210 в действительности не будет переключаться на эту высокую передачу, пока используется второй орган 50 рулевого управления.
Первый 10 и второй 50 органы рулевого управления используются для управления поворотом колес (например, передних или задних колес) колесного экскаватора. На таком экскаваторе используется одна или несколько ручек для управления движением нескольких частей или орудий машины, например, ковшом экскаватора, устройством стрелы и др. Оператор держит обе свои руки на этих ручках управления, когда управляет экскаватором и этими частями или орудиями в рабочем режиме экскаватора (не в режиме движения машины по дороге). Предпочтительно второй орган 50 рулевого управления встроен в одну из таких ручек управления, так что оператор может использовать функцию рулевого управления, не убирая рук с ручек управления. В качестве примера на фиг.1 показано, как рука оператора удобно охватывает рычаг 72 такой ручки 70 управления.
Второй орган 50 рулевого управления расположен в верхней части 74 рычага 72 ручки 70 управления, и оператор может легко перемещать его большим пальцем 12 (предпочтительно, как показано на фиг.1, в двух направлениях: в первом основном направлении налево или направо, от оператора). В другом варианте второй орган 50 управления может быть установлен на ручке 70 управления таким образом, чтобы его можно было перемещать в двух направлениях: а) в другом основном направлении, по вертикали относительно первого основного направления, и в направлении от оператора или к нему, или же б) в любом направлении между двумя вышеуказанными основными направлениями. Путем перемещения второго органа 50 рулевого управления, как показано на фиг.1, влево или вправо от оператора обеспечивается поворот колес экскаватора, соответственно, налево или направо, то есть, управление с помощью дополнительного органа управления осуществляется оператором интуитивно, например, перемещение органа рулевого управления влево вызывает поворот колес экскаватора также влево, и наоборот, при перемещении органа управления вправо.
Рулевое управление может осуществляться путем преобразования действия второго органа 50 рулевого управления, например, перемещения движка большим пальцем в пределах диапазона его перемещения или вращения колесика в электрический сигнал, который передается в электронный блок 60 управления Направление перемещения второго органа 50 рулевого управления показано на фиг.1 двухсторонней стрелкой 52. Скорость, с которой будет изменяться угол поворота колеса экскаватора относительно их положения прямо вперед, является функцией амплитуды смещения движка относительно его нейтрального положения посередине его рамки. Эта функция может быть линейной или любой нелинейной монотонно изменяющейся функцией. Например, перемещение ползунка из одного конца рамки через нейтральное положение в другой конец рамки (такое типичное перемещение может составлять ±1 см относительно нейтрального положения в середине рамки) может, в зависимости от выбранной функции управления, вызывать соответствующий поворот колес экскаватора между двумя крайними угловыми положениями (соответствуют поворотам колес экскаватора на максимальный угол налево или направо относительно их положения прямо вперед).
На фиг.2 приведена схема предпочтительного варианта гидравлической системы транспортного средства 210 (показанного лишь двумя колесами 212R, 212L с гидравлической системой 200 рулевого управления) в соответствии с настоящим изобретением. Транспортное средство 210 может быть любым типом транспортного средства, таким как строительное оборудование или строительная машина, например, колесный экскаватор. Для упрощения в дальнейшем рассмотрении предполагается, что транспортное средство 210 является колесным экскаватором.
Первый орган 10 рулевого управления, представляющий собой (как уже упоминалось) рулевое колесо, изображенное в упрощенном виде, соединен функционально с первым клапанным узлом 30 рулевого управления, содержащим первый клапан (изображен в общем виде) и другие компоненты. Клапанный блок 30 рулевого управления представляет собой обычное устройство, известное в технике, и поэтому здесь подробно не описывается. Может использоваться любое такое устройство, известное в технике, которое обеспечивает рулевое управление колесами с использованием гидравлических компонентов.
Как известно в технике, приведение в действие первого устройства 10 рулевого управления, например, поворот рулевого колеса, оператором экскаватора 210 приводит к тому, что гидравлическая рабочая среда поступает в одну из гидравлических линий 34L или 34R, обеспечивая подачу гидравлической энергии в соответствующую сторону 40R или 40L цилиндра 40 рулевого управления, в результате чего колеса 212L, 214R поворачиваются по часовой стрелке или против часовой стрелки. Колеса 212L, 212R могут быть снабжены тормозами 214R, 214L для фиксации колес при выполнении рабочих операций экскаватора 210. Давление гидравлической рабочей среды в системе поддерживается известным образом с помощью насоса 80 и может достигать 200 бар. Для сброса давления гидравлическая рабочая среда выпускается в гидравлический резервуар 90, в котором поддерживается низкое давление, например, 2 бара, или же в резервуаре 90 может быть атмосферное давление. Насос 80 соединяется с резервуаром 90 с использованием соответствующей линии.
Между насосом 80 и клапанным узлом 30 рулевого управления расположен приоритетный клапан 20. Насос 80 подсоединяется к входу Р приоритетного клапана 20. Приоритетный клапан 20 соединяется с первым клапанным узлом 30 рулевого управления: а) по магистральной гидравлической линии 32 между выходом LS приоритетного клапана 20 и соответствующим входом LS клапанного узла 30 рулевого управления и б) по линии 22 между выходом CF приоритетного клапана 20 и входом Р первого клапанного блока 30 рулевого управления. В системе используется датчик-сигнализатор 38 давления, предназначенный для предупреждения оператора о падении давления на входе Р первого клапанного узла 30 рулевого управления ниже заданной величины, например, ниже 5 бар, что указывает на нарушение подачи гидравлической рабочей среды, например, гидравлческой жидкости, от насоса 80.
Приоритетный клапан 20 и, соответственно, клапанный узел 30 рулевого управления реагируют на управляющее действие первого органа 10 рулевого управления.
К магистральной гидравлической линии 32 между выходом LS приоритетного клапана 20 и соответствующим входом LS первого клапанного узла 30 рулевого управления подсоединен датчик 36 давления.
Выход EF приоритетного клапана 20 соединяется по гидравлической линии 24 с входом Р второго клапанного узла 100 рулевого управления, который имеет выходы А и В. Выход А второго клапанного узла 100 рулевого управления соединяется с правым входом (правая сторона 40R) цилиндра 40 рулевого управления для поворота колес 212R и 212L направо (по часовой стрелке, если смотреть сверху), и выход В второго клапанного узла 100 рулевого управления соединяется с левым входом (левая сторона 40L) цилиндра 40 рулевого управления для поворота колес 212R и 212L налево (против часовой стрелки, если смотреть сверху).
Второй клапанный узел 100 рулевого управления содержит клапан 110 рулевого управления (указывается далее как "второй клапан 110 рулевого управления" для отличия его от соответствующего "первого клапана рулевого управления", входящего в состав первого клапанного узла 30 рулевого управления), и пропорциональный клапан 120 регулирования потока, гидравлически соединенный последовательно со вторым клапаном 110 рулевого управления. В рассматриваемом варианте второй клапан 110 рулевого управления и пропорциональный клапан 120 регулирования потока соединены последовательно и входят в состав второго клапанного узла 100 рулевого управления. Однако они могут быть расположены отдельно друг от друга при условии, что функционально они действуют последовательно.
Также пропорциональный клапан 120 регулирования потока может быть расположен в другом конструктивном блоке, в результате чего клапаны 110, 120, а также компенсатор 130 давления в линии 102 и клапан 140 сброса давления в линии 104 могут быть соединены как отдельные компоненты.
Клапан 110 рулевого управления выполнен по схеме 4/3, в которой: а) в первом (среднем положении, как показано на фиг.2) он перекрывает поток гидравлической рабочей среды; б) во втором положении открывает подачу гидравлической рабочей среды в соответствующие стороны 40R и 40L цилиндра 40 рулевого управления в одном направлении; и в) в третьем положении клапан меняет направление подачи гидравлической рабочей среды в соответствующие стороны 40R и 40L цилиндра 40 рулевого управления, в результате чего обеспечивается поворот колес 212R и 212L колесного экскаватора 210 вправо или влево для движения машины, соответственно, вправо или влево.
Избыток гидравлической рабочей среды может перепускаться в обход пропорционального клапана 120 регулирования потока компенсатором 130 давления в линии 102, который включается гидравлической рабочей средой между пропорциональным клапаном 120 регулирования потока и вторым клапаном 110 рулевого управления и отводит гидравлическую рабочую среду через выход Т в резервуар, который в предпочтительном варианте является тем же самым резервуаром 90, который соединен с первым клапанным узлом 30 рулевого управления. Пропорциональный клапан 120 регулирования потока защищен от избыточного давления клапаном 140 сброса давления в линии 104. Обратная линия 108, соединяющая второй клапан 110 рулевого управления, с резервуаром 90 для гидравлической рабочей среды, содержит дросселирующий элемент 106, который поддерживает определенное обратное давление, когда гидравлическая рабочая среда, например гидравлическая жидкость, вытекает из соответствующей стороны 40R или 40L цилиндра 40 рулевого управления, в результате чего предотвращается нежелательные движения, когда элементы 212R и 214L, взаимодействующие с поверхностью земли, двигаются.
Управление вторым клапаном 110 рулевого управления и пропорциональным клапаном 120 регулирования потока осуществляется с помощью электрических сигналов электронным блоком 60 управления.
Первый клапан рулевого управления (входит в состав первого клапанного узла 30 рулевого управления) и второй клапан 110 рулевого управления (входит в состав второго клапанного узла 100 рулевого управления) соединяются по соответствующим линиям 34L и 34R с соответствующими сторонами 40L и 40R цилиндра 40 рулевого управления: первый клапан рулевого управления - через выходы L и R первого клапанного узла 30 рулевого управления, и второй клапан 110 рулевого управления - через выходы А и В второго клапанного узла 100 рулевого управления.
Рабочее состояние приоритетного клапана 20 определяет, какая величина потока гидравлической рабочей среды будет направлена из насоса 80 в традиционный клапан первого клапанного узла 30 рулевого управления, соединенный с выходом CF приоритетного клапана 20, причем остальная часть потока гидравлической рабочей среды, поступающая из насоса 80, будет направляться во второй клапан 110 рулевого управления второго клапанного узла 100 рулевого управления, соединенный с выходом EF приоритетного клапана 20.
Гидравлическая система 200 может использоваться в двух альтернативных рабочих режимах.
В первом рабочем режиме второй клапанный узел 100 рулевого управления может использоваться только в том случае, когда первый орган 10 рулевого управления, который функционально соединен с первым клапанным узлом 30 рулевого управления, не задействован, то есть, обеспечивается безопасность работы.
Во втором рабочем режиме второй клапанный узел 100 рулевого управления может использоваться одновременно с первым клапанным узлом 30 рулевого управления, когда задействован первый орган 10 рулевого управления.
Во втором рабочем режиме второй клапан 110 рулевого управления может успешно использоваться для изменения скорости поворота в качестве сервопривода, например, усиливая или поддерживая управляющее перемещение первого органа рулевого управления (рулевое колесо 10 на фиг.2). Такое изменение скорости поворота, когда задействованы первый 30 и второй 100 клапанные узлы рулевого управления, осуществляется системой автоматически, в то время как оператор использует только первый орган рулевого управления, то есть, поворачивает рулевое колесо 10. Если в этом режиме изменения скорости поворота (второй рабочий режим) оператор будет использовать второй орган 50 рулевого управления, а именно, ползунок 50 на ручке 70 управления, параллельно с управлением с помощью рулевого колеса 10, то работа второго органа 50 будет запрещена или же он не будет оказывать никакого влияния на работу рулевого управления. Состояние активации второго клапанного узла 100 рулевого управления предпочтительно может быть задано с помощью вычислительной системы и может быть независимым от текущего положения второго органа 50 рулевого управления. Практически движение первого органа 10 рулевого управления будет формировать соответствующий выходной сигнал датчика 36 давления, соединенного с магистральной гидравлической линией 32, который может использоваться (например, через электронный блок управления 60) для изменения состояния второго клапанного узла 100 рулевого управления. Направление поворота для второго клапана 110 рулевого управления может определяться выходным сигналом датчика 42, который может быть механическим датчиком или датчиком Холла, установленным на управляемой оси или на рулевой колонке, связанной с рулевым колесом 10. Пропорциональный сигнал, переданный в пропорциональный клапан 120 регулирования потока, может определяться выходным сигналом датчика 36 давления.
В первом рабочем режиме предлагаемой в настоящем изобретении гидравлической системы, в котором рулевое управление может осуществляться с помощью второго органа 50 рулевого управления, могут различаться два рабочих состояния.
1. В первом рабочем состоянии в рамках первого рабочего режима предлагаемой в настоящем изобретении гидравлической системы рулевое колесо 10 поворачивается оператором для управления направлением движения рабочей машины. В этом случае повышается давление в магистральной гидравлической линии 32 между традиционным (первым) клапанным узлом 30 рулевого управления и приоритетным клапаном 20. Приоритетный клапан 20 переключает поток гидравлической рабочей среды на традиционный (первый) клапанный узел 30 рулевого управления пропорционально текущему давлению в магистральной гидравлической линии 32. Увеличение давления определяется датчиком 36 давления.
В первом варианте осуществления изобретения (используемого в рамках первого рабочего режима предлагаемой в изобретении гидравлической системы) выходной сигнал датчика 36 давления, отражающий увеличение давления в магистральной гидравлической линии 32, приводит к отключению второго клапанного узла 100 рулевого управления путем снятия электрического напряжения с соленоида, который управляет клапанным узлом 100, а именно, второго клапана 110 рулевого управления путем перемещения его в первое (среднее) положение (как показано на фиг.2), в результате чего: а) выход пропорционального клапана 120 регулирования потока по линии 108 соединяется с резервуаром 90, и б) перекрываются соединения с выходами А и В. Пропорциональный клапан 120 регулирования потока будет также отключен, так что поток гидравлической рабочей среды будет направлен в резервуар 90 через клапан 130 и линию 102 при низком давлении, например, 7 бар. Таким образом, имеются два условия, обеспечивающие приоритетное управление с помощью первого органа 10 рулевого управления (например, рулевого колеса) относительно управления с помощью второго органа 50 рулевого управления, установленного, например, на ручке 70 управления (фиг.1).
Оба клапана 110, 120 второго клапанного узла 100 рулевого управления предпочтительно должны отключаться одновременно. Если отключить только пропорциональный клапан 120 регулирования потока, то одна сторона, 40L или 40R, то есть, одна из линий 34L или 34R, будет оставаться подключенной к резервуару 90 через второй клапан 110 рулевого управления, то есть, возникает нежелательная ситуация, поскольку будет невозможно поворачивать рулевое колесо 10 в противоположном направлении. Если отключить только второй клапан 110 рулевого управления, то поток гидравлической рабочей среды через пропорциональный клапан 120 регулирования потока будет сбрасываться через дроссель 106 и линию 108 в резервуар 90, что также нежелательно, поскольку такой сброс приводит к нежелательным потерям энергии.
2. Во втором рабочем состоянии (в рамках первого рабочего режима предлагаемой в настоящем изобретении гидравлической системы) оператор не поворачивает первый орган 10 рулевого управления, например, рулевое колесо, однако использует второй орган 50 рулевого управления. В этом случае пропорциональный клапан 120 регулирования потока второго клапанного узла 100 рулевого управления соединяется с выходом EF приоритетного клапана 20, и на вход Р клапана 120 подается гидравлическая рабочая среда под высоким давлением, создаваемым насосом.
Управление вторым клапаном 110 рулевого управления и пропорциональным клапаном 120 регулирования потока осуществляется электронным блоком 60 управления, который получает: а) сигнал давления от датчика 36 давления, указывающий на то, что первый орган 10 рулевого управления не задействован, то есть, не используется оператором экскаватора, а также б) электрический сигнал, соответствующий управляющему действию второго органа 50 рулевого управления на ручке 70 управления экскаватора 210. Таким образом, второй клапан 110 рулевого управления и пропорциональный клапан 120 регулирования потока второго клапанного узла 100 рулевого управления включаются электрическими сигналами и могут принимать последующие электрические сигналы из электронного блока 60 управления.
Одновременно второй клапан 110 второго клапанного узла 100 рулевого управления переводится в одно из двух положений, расположенных по обеим сторонам от среднего положения, в зависимости от необходимого направления поворота колес 212R и 212L экскаватора 210, задаваемого соответствующим образом электронным блоком 60 управления. Из электрического сигнала, формируемого вторым органом 50 рулевого управления, извлекается сигнал ("включение левого поворота", "включение правого поворота", "выключение поворота") для задания направления поворота вторым клапаном 110 рулевого управления и сигнал широтно-импульсной модуляции для управления пропорциональным клапаном 120 регулирования потока. Первый сигнал ("включение левого поворота", "включение правого поворота", "выключение поворота") указывает направление поворота машины, то есть, левую или правую сторону, 40L или 40R, цилиндра 40, в которую должно быть подан поток гидравлической рабочей среды. Таким образом, второй клапан 110 рулевого управления перемещается во второе или третье положение в соответствии с первым сигналом ("включение левого поворота", "включение правого поворота", "выключение поворота").
Когда второй орган 50 рулевого управления перемещается в сторону от своего среднего (нейтрального) положения, колеса 212R, 212L должны поворачиваться по часовой стрелке, то есть, направо, если смотреть сверху на фиг.1. Таким образом, сигнал "включение" означает, что соответствующий сигнал "включение" сформирован для перевода второго клапана 110 рулевого управления в соответствующее положение, открывающее подачу гидравлической рабочей среды в одну из двух сторон, 40R или 40L, цилиндра 40 рулевого управления, и отток гидравлической рабочей среды из другой стороны, 40L или 40R, соответственно, цилиндра 40 рулевого управления. Когда оператор перемещает второй орган 50 рулевого управления таким образом, что колеса 212R, 212L должны поворачиваться против часовой стрелки, то есть, налево, если смотреть сверху, то второй клапан 110 рулевого управления перемещается в соответствующее другое положение, обеспечивая обратный поток гидравлической рабочей среды.
Сигнал "выключено" соответствует ситуации, в которой отсутствует сигнал "включено" для левого или правого соленоида второго клапана 110 рулевого управления, в результате чего клапан остается в среднем положении (удерживается в центре пружиной). Более конкретно, если отсутствуют сигналы "включение левого поворота" и "включение правого поворота", то клапан 110 остается в среднем положении. Если сформирован сигнал "включение правого поворота" (и "выключение левого поворота"), то клапан 110 переводится в соответствующее крайнее положение (из двух имеющихся). Если сформирован сигнал "включение левого поворота" (и "выключение правого поворота"), то клапан 110 переводится в соответствующее другое крайнее положение.
Второй орган 50 рулевого управления, реализованный, например, в форме движка, сдвигаемого большим пальцем, предпочтительно имеет три различных состояния: нейтральное, когда он находится посередине рамки, в пределах которой он может перемещаться, что соответствует среднему положению второго клапана 110 рулевого управления; состояние левого поворота, когда он перемещен влево, что соответствует левому положению второго клапана 110, и состояние правого поворота, когда он перемещен вправо, что соответствует правому положению второго клапана 110. Выходные сигналы, соответствующие этим трем состояниям второго органа 50 рулевого управления, всегда будут существовать в базовом варианте осуществления изобретения, поскольку оператор способен механически сдвинуть второй орган 50, ползунок в рамке, даже если он в этом время поворачивает рулевое колесо 10. Однако электронный блок 60 управления обеспечивает логику работы, при которой эти выходные сигналы не оказывают влияния на второй клапанный узел 100 рулевого управления, то есть, два клапана 110 и 120 клапанного узла выключены, если работает рулевое колесо 10.
Широтно-импульсный сигнал определяет характеристики поворота, в особенности скорость поворота, например, с какой быстротой будут поворачиваться колеса 212L и 212R экскаватора. Этот сигнал пропорционален степени отклонения второго органа 50 рулевого управления, например, пропорционален боковому смещению движка вправо или влево от нейтрального положения посередине рамки движка или же, в альтернативном варианте, вращательному перемещению колесика, вращаемого большим пальцем оператора. Таким образом, пропорциональный клапан 120 регулирования потока только передает во второй клапан 110 рулевого управления количество гидравлической рабочей среды, пропорциональное степени отклонения второго органа 50 рулевого управления. Избыток гидравлической энергии, то есть, гидравлической рабочей среды спускается компенсатором 130 давления через линию 102 в резервуар 90.
Во втором варианте осуществления изобретения (используется в рамках второго рабочего режима предлагаемой гидравлической системы) для обеспечения изменения скорости поворота, когда гидравлическая система 200 находится в первом рабочем состоянии, может использоваться датчик 36 давления.
Когда используется первый орган 10 рулевого управления (первое рабочее состояние), приоритетный клапан 20 будет подавать требуемый поток гидравлической рабочей среды из насоса 80 в первый клапан 30 рулевого управления в соответствии с уровнем давления, измеренным датчиком 36 давления в магистральной гидравлической линии 32. В этом случае избыток потока гидравлической рабочей среды, выходящего из насоса 80, будет направлен во второй клапан 110 рулевого управления через выход EF приоритетного клапана 20.
В отличие от рассмотренного выше первого варианта осуществления изобретения, в котором второй клапанный узел 100 рулевого управления отключается в первом рабочем состоянии, и, соответственно, избыток потока гидравлической рабочей среды сбрасывается в резервуар 90, во втором варианте этот избыток гидравлической рабочей среды может использоваться для подачи дополнительного потока среды в цилиндр 40 рулевого управления через второй клапанный узел 100, когда используется первый орган 10 рулевого управления.
Сигнал, передаваемый в пропорциональный клапан 120 регулирования потока, будет соответствовать величине давления, измеренной датчиком 36 давления. Дополнительный датчик 42, например, механический датчик или датчик Холла, который может быть установлен на управляемой оси или на рулевой колонке (см. фиг.2) может давать направление движения первого органа 10 рулевого управления (направо или налево) для обеспечения передачи соответствующего сигнала управления ("включение левого поворота", "включение правого поворота") во второй клапан 110 рулевого управления.
В другом варианте датчик 42 рулевого управления может использоваться для определения направления поворота машины и скорости перемещения первого органа 10 рулевого управления. В этом случае величина давления, измеренная датчиком 36 давления, может быть успешно заменена величиной скорости, измеренной датчиком 42 рулевого управления, в качестве входного сигнала, управляющего пропорциональным клапаном 120 регулирования потока.
На фиг.3 приведена блок-схема программы, обеспечивающей осуществление способа по первому варианту изобретения, для отключения второго органа 50 рулевого управления (фиг.1), в котором приоритетным является первый орган 10 рулевого управления (фиг.2), как это уже было описано со ссылками на фиг.1 и 2. Эта программа предпочтительно может выполняться в электронном блоке управления 60.
Выполнение программы начинается на стадии 300. В подпрограмме "Функция предварительных условий" на стадии 302 проверяются предварительные условия для активации второго клапанного узла 100 рулевого управления (фиг.2). В предпочтительных вариантах предварительными условиями могут быть: работа двигателя экскаватора (транспортного средства, в более общем случае) и/или наличие достаточного давления гидравлической рабочей среды, а также неиспользование первого органа 10 рулевого управления. Другим предварительным условием может быть разрешенный рабочий режим, заданный для экскаватора (транспортного средства), если в управлении экскаватором (транспортным средством) обеспечивается один или несколько таких рабочих режимов, например, рабочий режим, в котором активирован ковш колесного экскаватора. Еще одним предварительным условием может быть активация разрешенного режима управления движением по дороге при условии, что такой режим движения обеспечивается в системе управления экскаватором (транспортным средством). Кроме того, другие предохранительные и/или защитные устройства, которые должны быть активированы, также могут рассматриваться в качестве предварительных условий, например, управляющий рычаг блокировки, который должен быть расположен в определенном положении, если оператор находится в экскаваторе (транспортном средстве). Кроме того, предварительное условие, которое должно выполняться, может заключаться в том, что включена определенная передача трансмиссии транспортного средства, или величина скорости не превышает максимального предельного значения для этого транспортного средства, при превышении которого возможно использование только рулевого колеса 10 и невозможно использование второго органа 50 рулевого управления. Если одно из предварительных условий не выполняется, электрический выходной сигнал второго органа 50 рулевого управления все равно будет передаваться в электронный блок 60 управления. Однако в этом случае электронный блок 60 управления принимает решения выключить или запретить включение второго клапанного узла 100 рулевого управления.
Если выполнены все проверяемые предварительные условия, то в электронном блоке 60 управления может быть установлен соответствующий флажок, который устанавливается в состояние "1", если выполнены все предварительные условия, и в "0", если одно или несколько условий не выполнены.
На стадии 304 проверяется выполнение всех предварительных условий. Если получен отрицательный ответ (указано "Нет" на фиг.3), то все выходы второго клапанного узла 100 рулевого управления перекрываются. В частности, на стадиях 320, 322, 324 отключаются клапаны 110, 120. На стадии 320 выключается напряжение на соленоиде правой стороны (RH_sol на фиг.3) второго клапана 110 рулевого управления, в результате чего золотник второго клапана 110 рулевого управления возвращается назад в нейтральное положение под действием пружины, расположенной на противоположной стороне. На стадии 322 выключается напряжение на соленоиде левой стороны (LH_sol на фиг.3) второго клапана 110 рулевого управления, в результате чего золотник второго клапана 110 рулевого управления возвращается назад в нейтральное положение под действием пружины, расположенной на противоположной стороне, и на стадии 324 выключается напряжение на соленоиде (PRV на фиг.3) пропорционального клапана 120 рулевого управления, в результате чего золотник пропорционального клапана 120 рулевого управления возвращается назад в закрытое положение под действием пружины, расположенной на противоположной стороне золотника, и выполнение программы заканчивается на стадии 350.
Если на стадии 304 определяется, что выполнены все необходимые предварительные условия (указано "Да" для стадии 304 на фиг.3), то на стадии 306 вычисляется коэффициент scal_f пересчета для второго клапанного узла 100 рулевого управления в соответствии с текущим положением второго органа 50 рулевого управления (фиг.1). Это выполняется только в том случае, если сигнал из второго органа 50 рулевого управления указывает на то, что второй орган 50 смещен из нейтрального положения (x=0). В этом варианте используется отношение 1:1 между крайними положениями (относительно нейтрального положения) второго органа 50 рулевого управления, то есть, если x≠0, то величина сигнала также отлична от нуля.
На стадии 308 из запоминающего устройства считывается токовая характеристика I(x), соответствующая предварительно заданному соотношению между текущим положением x второго органа 50 рулевого управления и током I, которая будет рассчитываться в электронном блоке управления, например, в форме линейной или нелинейной монотонной функции. На стадии 310 по выбранной характеристике I(x), скорректированной пропорционально коэффициенту scal_f пересчета, вычисляется скважность сигнала импульсно-широтной модуляции (ШИМ). На стадии 312 электронный блок управления передает выходной сигнал (Set PRV) в пропорциональный клапан 120 регулирования потока в соответствии со скважностью сигнала ШИМ.
На стадии 314 проверяется условие scal_f>0. Если результат проверки отрицательный (указано "Нет" для стадии 314 на фиг.3), то на стадии 316 проверяется условие scal_f<0. Если результат проверки отрицательный (указано "Нет" для стадии 316 на фиг.3), то выполняются вышеупомянутые стадии 320, 322, 324, и второй клапанный узел 100 рулевого управления отключается. В этом случае коэффициент scal_f пересчета равен 0. Выполнение программы заканчивается на стадии 350.
Если scal_f<0 (указано "Да" для стадии 316 на фиг.3), то на стадии 340 включается соленоид (LH_sol) левой стороны второго клапана 110 рулевого управления, то есть подается давление в левую сторону 40L цилиндра 40 рулевого управления. Если scal_f>0 (указано "Да" для стадии 314 на фиг.3), то на стадии 330 включается соленоид (RH_sol) правой стороны второго клапана 110 рулевого управления, то есть подается давление в правую сторону 40R цилиндра 40 рулевого управления. Выполнение программы заканчивается на стадии 350.
На фиг.4 приведена блок-схема программы, соответствующей второму варианту осуществления изобретения для использования второго клапанного узла 100 (фиг.2) рулевого управления в качестве устройства изменения скорости поворота, при использовании первого органа 10 рулевого управления.
Для управления сигналом, подаваемым в пропорциональный клапан 120 регулирования потока, может использоваться датчик 36 давления (фиг.2), и датчик 42 направления может использоваться для управления сигналом, подаваемым во второй клапан 110 рулевого управления.
В другом варианте датчик 42 может использоваться для получения информации о точной скорости первого органа 10 рулевого управления и, соответственно, для обеспечения более точного управления дополнительным потоком гидравлической рабочей среды, который должен быть направлен в цилиндр 40 рулевого управления через пропорциональный клапан 120 регулирования потока.
Выполнение программы начинается на стадии 400. В подпрограмме "Функция предварительных условий" на стадии 402 проверяются предварительные условия для активации второго клапанного узла 100 рулевого управления (фиг.2). В предпочтительных вариантах предварительными условиями могут быть: работа двигателя экскаватора (транспортного средства, в более общем случае) и/или наличие достаточного давления гидравлической рабочей среды, а также неиспользование первого органа 10 рулевого управления. Другим предварительным условием может быть разрешенный рабочий режим, заданный для экскаватора (транспортного средства), если в управлении экскаватором (транспортным средством) обеспечивается один или несколько таких рабочих режимов, например, рабочий режим, в котором активирован ковш колесного экскаватора. Другим предварительным условием может быть активация разрешенного режима управления движением по дороге при условии, что такой режим движения обеспечивается в системе управления экскаватором (транспортным средством). Кроме того, другие предохранительные и/или защитные устройства, которые должны быть активированы, также могут рассматриваться в качестве предварительных условий, например, управляющий рычаг блокировки, который должен быть расположен в определенном положении, если оператор находится в экскаваторе (транспортном средстве). Кроме того, предварительное условие, которое должно выполняться, может заключаться в том, что включена определенная передача трансмиссии транспортного средства, или величина скорости не превышает максимального предельного значения для этого транспортного средства, при превышении которого возможно использование только рулевого колеса 10 и невозможно использование второго органа 50 рулевого управления. Если одно из предварительных условий не выполняется, электрический выходной сигнал второго органа 50 рулевого управления все равно будет передаваться в электронный блок 60 управления. Однако в этом случае электронный блок 60 управления принимает решения выключить или запретить включение второго клапанного узла 100 рулевого управления.
Если выполнены все проверяемые предварительные условия, то в электронном блоке 60 управления может быть установлен соответствующий флажок, который устанавливается в состояние "1", если выполнены все предварительные условия, и в "0", если одно или несколько условий не выполнены.
На стадии 404 проверяется выполнение всех предварительных условий. Если получен отрицательный ответ (указано "Нет" для стадии 404 на фиг.4), то все выходы второго клапанного узла 100 рулевого управления перекрываются. В частности, на стадиях 420, 422, 424 отключаются клапаны 110, 120. На стадии 420 выключается напряжение на соленоиде правой стороны (RH_sol на фиг.4) второго клапана 110 рулевого управления, в результате чего золотник второго клапана 110 рулевого управления возвращается назад в нейтральное положение под действием пружины, расположенной на противоположной стороне. На стадии 422 выключается напряжение на соленоиде левой стороны (LH_sol на фиг.4) второго клапана 110 рулевого управления, в результате чего золотник второго клапана 110 рулевого управления возвращается назад в нейтральное положение под действием пружины, расположенной на противоположной стороне, и на стадии 424 выключается напряжение на соленоиде (PRV на фиг.4) пропорционального клапана 120 рулевого управления, в результате чего золотник пропорционального клапана 120 рулевого управления возвращается назад в закрытое положение под действием пружины, расположенной на противоположной стороне золотника, и выполнение программы заканчивается на стадии 450.
Если на стадии 404 определяется, что выполнены все необходимые предварительные условия (указано "Да" для стадии 404 на фиг.4), то на стадии 406 вычисляется коэффициент scal_f пересчета для второго клапанного узла 100 рулевого управления в соответствии с положением второго органа 50 рулевого управления (фиг.1), если он используется оператором, или же в соответствии с величиной Р давлением, измеряемой датчиком 36 давления, и направлением S поворота ("вправо" или "влево"), измеряемым датчиком 42 первого органа рулевого управления, если оператором используется первый орган 10 рулевого управления. На стадии 418 обеспечиваются сигналы Р и S в качестве входных параметров для стадии 406.
В другом варианте коэффициент scal_f пересчета может быть вычислен в соответствии с величиной скорости перемещения первого органа 10 рулевого управления.
На стадии 408 из запоминающего устройства считывается токовая характеристика I(x), соответствующая предварительно заданному соотношению между величиной scal_f и током I, которая будет рассчитываться в электронном блоке управления, например, в форме линейной или нелинейной монотонной функции. На стадии 410 по выбранной функции I(x) вычисляется скважность сигнала ШИМ. На стадии 412 электронный блок управления передает выходной сигнал (Set PRV) в пропорциональный клапан 120 регулирования потока в соответствии с величиной O(x) скважности сигнала ШИМ. O(x) - это характеристическая функция, которая изменяет скважность сигнала ШИМ (в %) для заданной кривой I(x) и коэффициента scal_f пересчета, причем коэффициент scal_f пересчета может изменяться в зависимости от величины Р давления, измеряемой датчиком 36 давления, и направления S поворота, в отличие от расчета скважности сигнала ШИМ, осуществляемого в варианте, схема которого приведена на фиг.3. Термин "скважность" означает отношение в % продолжительности импульсов тока к продолжительности промежутков между импульсами тока в одном цикле (100% означает постоянную передачу тока).
На стадии 414 проверяется условие scal_f>0. Если результат проверки отрицательный (указано "Нет" для стадии 414 на фиг.4), то на стадии 416 проверяется условие scal_f<0. Если результат проверки отрицательный (указано "Нет" для стадии 416 на фиг.4), то выполняются вышеупомянутые стадии 420, 422, 424, и второй клапанный узел 100 рулевого управления отключается. В этом случае коэффициент scal_f пересчета равен 0. Выполнение программы заканчивается на стадии 450.
Если scal_f<0 (указано "Да" для стадии 416 на фиг.4), то на стадии 440 включается соленоид (LH_sol) левой стороны второго клапана 110 рулевого управления, то есть подается давление в левую сторону 40L цилиндра 40 рулевого управления. Если scal_f>0 (указано "Да" для стадии 414 на фиг.4), то на стадии 430 включается соленоид (RH_sol) правой стороны второго клапана 110 рулевого управления, то есть подается давление в правую сторону 40R цилиндра 40 рулевого управления. Выполнение программы заканчивается на стадии 450.
Гидравлическая система 200 рулевого управления и соответствующий способ существенно повышают удобство работы оператора на транспортном средстве, таком как самоходная рабочая машина, в которой используются две системы рулевого управления, например, одна при движении машины по дороге, и другая при работе орудия рабочей машины или на скорости движения, не превышающей заданной максимальной скорости для этой машины.
Изобретение не ограничивается рассмотренными выше вариантами его осуществления. Например, гидравлическая система, схема которой приведена на фиг.2, может быть легко адаптирована для применения на шарнирно-сочлененном транспортном средстве (например, на колесном погрузчике или на шарнирно-сочлененном самосвале), в котором поворачиваются не колеса, а целиком вся передняя часть транспортного средства относительно его задней части. В этом случае цилиндр 40 рулевого управления будет использоваться не для поворота задних или передних колес, а для поворота одной части шарнирно-сочлененного транспортного средства (передней или задней части вместе с колесами) относительно другой части, в результате чего транспортное средство будет двигаться налево или направо.
Кроме того, гидравлическая система, схема которой приведена на фиг.2, может использоваться для управления несколькими цилиндрами 40 рулевого управления. Например, рассмотренный вариант может быть доработан для управления несколькими цилиндрами рулевого управления, каждый из которых управляет поворотом одного колеса четырехколесного транспортного средства (два впереди и два сзади) или шестиколесного транспортного средства (два впереди и четыре сзади), и процессы управления поворотом каждого из колес координируются соответствующим образом (с использованием одного или нескольких электронных блоков управления) для обеспечения необходимого движения транспортного средства наиболее оптимальным образом.
Реферат
Изобретение относится к области транспортного машиностроения. Гидравлическая система рулевого управления для транспортного средства содержит первый и второй органы рулевого управления. Первый орган соединен с первым клапанным узлом, содержащим первый клапан рулевого управления. Поток гидравлической рабочей среды, подаваемый в один или несколько цилиндров рулевого управления, регулируется приоритетным клапаном, реализующим приоритет между первым и вторым органом рулевого управления. Второй клапанный узел содержит второй клапан рулевого управления. Приоритетный клапан соединен со вторым клапанным узлом по магистральной гидравлической линии. Второй клапан может действовать последовательно с пропорциональным клапаном регулирования потока. Способ управления гидравлической системой рулевого управления транспортного средства включает два рабочих режима. В первом рабочем режиме, когда первый орган рулевого управления не используется, управление вторым клапаном и/или пропорциональным клапаном регулирования потока осуществляют вторым органом рулевого управления. Во втором рабочем режиме второй и первый клапанные узлы рулевого управления используются одновременно, когда используют первый орган рулевого управления. Транспортное средство содержит упомянутую гидравлическую систему рулевого управления. Блок управления обеспечивает управление гидравлической системой рулевого управления транспортного средства и содержит машиночитаемую программу, при исполнении которой осуществляются операции способа управления гидравлической системой. Достигается удобство пользования рулевым управлением и
Комментарии