Тележка с изменяемой конфигурацией - RU2718245C1
Код документа: RU2718245C1
Чертежи
























Описание
Перекрестные ссылки на родственные заявки
Заявка на патент испрашивает приоритет и все преимущества предварительной патентной заявки № 62/312,149, поданной 23 марта 2016 года, которая включена в настоящее описание посредством ссылки в полном объеме.
Уровень техники
Мобильность транспортных средств, велосипедов и т.д. может быть ограничена в городских условиях, особенно в загруженной городской среде. Кроме того, людям в таких городских условиях может потребоваться перевозка грузов, что может быть затруднено из-за трудностей с мобильностью в такой загруженной городской среде.
Кроме того, пассажиры в городской среде могут столкнуться с проблемой «последней мили», в которой поездка может быть относительно не перегруженной до последней мили пути, где скопление увеличивается, так как многие пассажиры приближаются к одному и тому же месту назначения. Охват общественного транспорта, такого как автобусы или метро, часто не распространяется до конечного пункта назначения пользователя. Таким образом, пользователь сталкивается с проблемой перемещения от ближайшей остановки на общественном транспорте до своего конечного пункта назначения.
Краткое описание чертежей
На фиг. 1 показан вид в перспективе тележки в положении езды.
На фиг. 2 показан другой вид в перспективе, если тележка находится в положении езды.
На фиг. 3 показан вид в перспективе тележки в положении ручной тележки.
На фиг. 4 показан вид сбоку тележки в положении ручной тележки.
На фиг. 5 показан вид в перспективе тележки в сложенном положении.
На фиг. 6 показан вид в перспективе штифта тележки.
На фиг. 7 показан изолированный вид сбоку бокового вида руля тележки вдоль линии 7 на фиг. 10А.
На фиг. 8 показан изолированный вид сбоку второго сегмента рамы тележки вдоль линии 8 на фиг. 10А.
На фиг. 9 показан изолированный вид сбоку ступицы и первого сегмента рамы вдоль линии 9 на фиг. 10А.
На фиг. 10А показан поперечный разрез части тележки со штифтом в заблокированном положении и рамой в положении езды/ положении ручной тележки.
На фиг. 10В показан вид в поперечном разрезе части тележки со штифтом в первом разблокированном положении и рамой в положении езды/положении ручной тележки.
На фиг. 10С показан поперечный разрез части тележки со штифтом в первом разблокированном положении и вторым сегментом рамы, перемещающимся в положение грузовой тележки/сложенное положение.
На фиг. 10D показан поперечный разрез части тележки со штифтом в первом разблокированном положении и рамой в положении грузовой тележки/сложенном положении.
На фиг. 10Е показан поперечный разрез части тележки со штифтом во втором разблокированном положении и рамой в положении грузовой тележки/сложенном положении.
На фиг. 10F показан поперечный разрез части тележки со штифтом во втором разблокированном положении и рулем, перемещающимся в сложенное положение.
На фиг. 10G показан поперечный разрез части тележки со штифтом во втором разблокированном положении, а также рамой и рулем в сложенном положении.
На фиг. 11А показан поперечный разрез другого варианта осуществления части тележки со штифтом в заблокированном положении и рамой в положении езды/положении ручной тележки.
На фиг. 11В показан вид в разрезе варианта осуществления по фиг.11А со штифтом в первом разблокированном положении и рамой в положении езды/положении ручной тележки.
На фиг. 11С показан вид в разрезе варианта осуществления по фиг.11А со штифтом в первом разблокированном положении и вторым сегментом рамы, перемещающимся в положение грузовой тележки/сложенное положение.
На фиг. 11D показан вид в поперечном разрезе варианта осуществления по фиг. 11А со штифтом в первом разблокированном положении и рамой в положении грузовой тележки/сложенном положении.
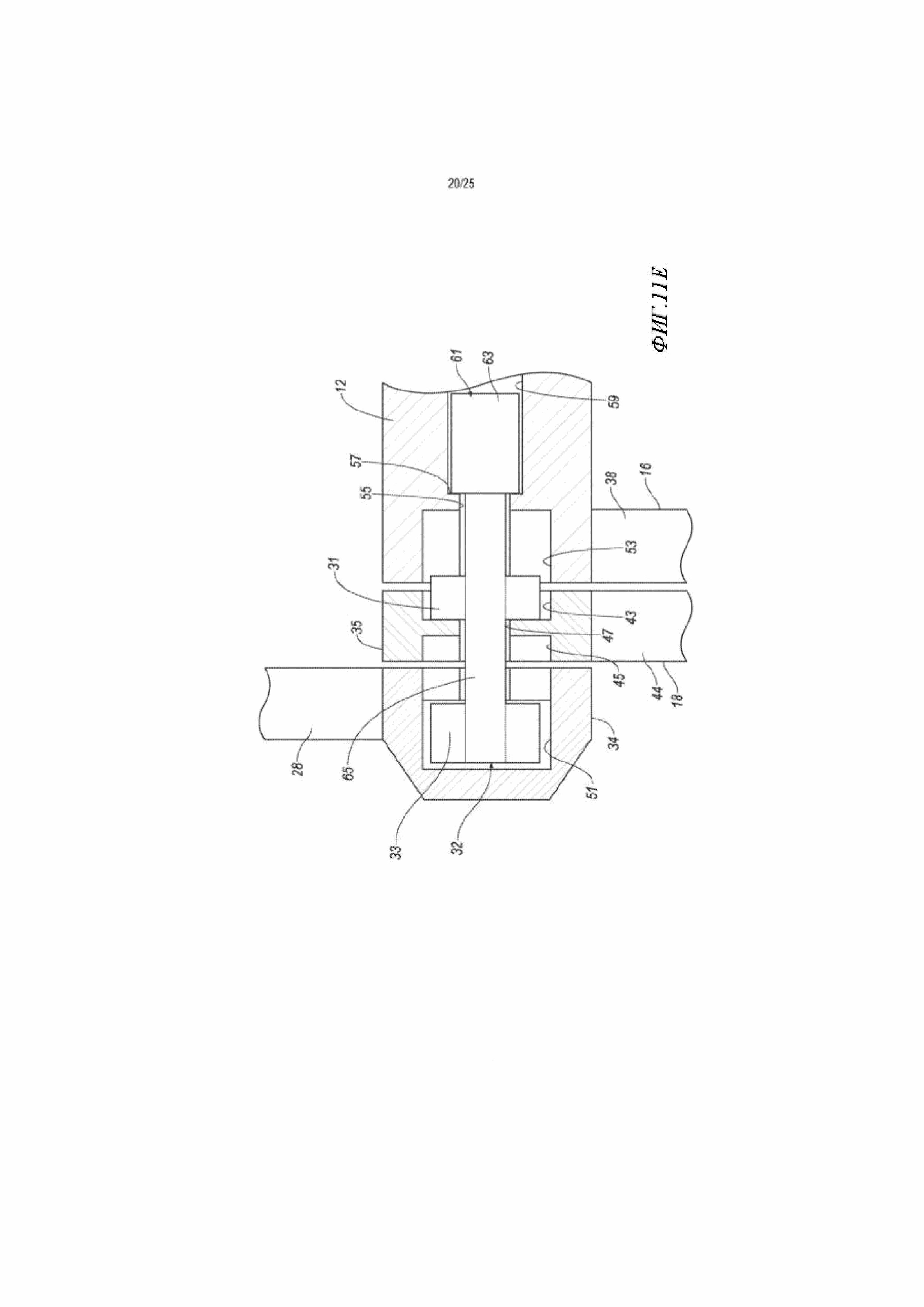
На фиг. 11Е показан вид в поперечном разрезе варианта осуществления по фиг.11А со штифтом во втором разблокированном положении и рамой в положении грузовой тележки/сложенном положении.
На фиг. 11F показан вид в поперечном разрезе варианта осуществления по фиг.11А со штифтом во втором разблокированном положении и рулем, перемещающимся в сложенное положение.
На фиг. 11G показан вид в поперечном разрезе варианта осуществления по фиг.11А со штифтом во втором разблокированном положении, а также рамой и рулем в сложенном положении.
На фиг. 12 показан -поперечный разрез первого сегмента рамы тележки и седла, соединенного с первым сегментом.
На фиг. 13 показана схема системы управления тележкой.
На фиг.14 показана блок-схема, включающая этапы, выполняемые системой управления.
Подробное описание сущности изобретения
Со ссылкой на фигуры, на которых одинаковые цифры обозначают одинаковые части на протяжении нескольких видов, складная тележка 10 включает в себя ступицу 12 и раму 14, имеющую первый сегмент 16 и второй сегмент 18, каждый из которых может вращаться вокруг ступицы 12. По меньшей мере один руль 26, 28 проходит от ступицы 12. Седло 24 закреплено на первом сегменте 16 рамы 14. Колеса 20 закреплены на первом сегменте 16 и втором сегменте 18 рамы 14. По меньшей мере один двигатель 22 приводит в движение по меньшей мере одно из колес 20. Один вариант осуществления ступицы 12 и рамы 14 показан на фиг. 1–10G, а другой вариант осуществления ступицы 12 и рамы 14 показан на фиг 11А–11G. Одинаковые цифры используются для определения общих признаков на фиг. 1–10G и 11A–11G.
Рама 14, руль 26, 28 и/или седло 24 могут перемещаться между двумя или более положениями для различных целей. Например, как показано на фиг. 1 и 2, рама 14, руль 26, 28 и седло 24 могут быть перемещены в положение езды так, что пассажир может быть размещен на седле 24 и захватить рули 26, 28. Как показано на фиг. 3, рама 14, руль 26, 28 и седло 24 могут быть перемещены в положение ручной тележки, так что пользователь может захватить рули 26, 28 и идти сзади рамы 14. Как показано на фиг. 4, рама 14, руль 26, 28 и седло 24 могут быть перемещены в положение грузовой тележки так, что пользователь может захватить рули 26, 28 и идти спереди или сзади рамы 14. Как показано на фиг.5, рама 14, руль 26, 28 и седло 24 могут быть перемещены в сложенное положение.
Складная тележка 10 может включать в себя по меньшей мере один штифт 30, 32, соединенный со ступицей 12. В частности, со ссылкой на фиг. 9–11G, ступица 12 может иметь отверстие 55, которое с возможностью перемещения принимает штифт 30, 32. Как описано ниже, ступица 12 может включать в себя замочную шпоночный паз 53 и полость 59. Шпоночный паз 53 и полость 59 могут быть выполнены соосно друг с другом. Стенка 57 может определять отверстие 55 и может отделять шпоночный паз 53 от полости 59. Стенка 57 может удерживать штифт 30, 32 в полости 59.
Как показано на фиг.1–3, в качестве одного примера, рама 14 может включать в себя два вторых сегмента 18 и два руля 26, 28, а складная тележка 10 может включать в себя первый штифт 30 и второй штифт 32. Втулка 12 может определять первую ось A1 вращения и вторую ось A2 вращения. Первый штифт 30 и второй штифт 32 могут быть расположены на расстоянии друг от друга и могут быть расположены на противоположных концах ступицы 12. Первый штифт 30 может проходить вдоль первой оси A1 вращения, а второй штифт 32 может проходить вдоль второй оси A2 вращения.
Первый сегмент 16 рамы 14 может входить в зацепление с возможностью поворота как с первым штифтом 30, так и со вторым штифтом 32. Один из вторых сегментов 18 и один из рулей 26, 28 могут входить в зацепление с возможностью поворота с первым штифтом 30, а другой из вторых сегментов 18 и другой из рулей 26, 28 может входить в зацепление с возможностью поворота со вторым штифтом 32. В частности, первый сегмент 16 и второй сегменты 18 могут выборочно вращаться вокруг осей A1, A2 вращения. В качестве альтернативы двум штифтам 30, 32, показанным на фигурах, складная тележка 10 может включать в себя только один из штифтов 30, 32 или больше, чем два штифта 30, 32. Один вариант осуществления штифтов 30, 32 показан на фиг. 1–10G, а второй вариант осуществления штифтов 30, 32 показан на фиг. 11А–11G. Только одна половина ступицы 12, рама 14 и штифт 32 показаны на фиг. 10А–10G, а другая половина может быть зеркальным отображением. Аналогично, только одна половина ступицы 12, рамы 14 и штифта 32 показана на фиг. 11А–11G, а другая половина представляет собой зеркальное отображение.
Оси A1, A2 вращения могут располагаться поперечно друг к другу, то есть быть не параллельными. В этом случае второй сегмент 18 может вращаться вокруг осей A1, A2 вращения до компактных положений в сложенном положении, как показано на фиг. 5, а вторые сегменты 18 могут разделиться во время вращения вокруг осей A1, A2 вращения для увеличения колесной базы складной тележки 10 в положении тележки и ручной тележки, как показано на рисунках 1–3. В качестве другого примера оси A1, A2 вращения могут быть параллельны друг другу. Например, оси A1, A2 вращения могут быть коллинеарными по отношению друг к другу.
Первый штифт 30 и второй штифт 32 выполнены, например, имеют размер, форму и положение, с возможностью вращения поддерживать первый сегмент 16, второй сегмент 18 и/или рули 26, 28. Например, как показано на фигурах, первый сегмент 16 может быть прикреплен к ступице 12, а второй сегмент 18 и рули 26, 28 закреплены с возможностью вращения на ступице 12 с помощью первого штифта 30 и второго штифта 32. В качестве другого примера один из первого сегмента 16, второй сегмент 18 и рули 26, 28 могут быть прикреплены к ступице 12, а другие два из первого сегмента 16, второй сегмент 18 и рули 26, 28 могут быть закреплены с возможностью вращения на ступице 12 с помощью первого штифта 30 и второго штифта 32.
Первый штифт 30 и/или второй штифт 32 могут быть сформированы так, чтобы выборочно позволять второму сегменту 18 и рулям 26, 28 вращаться относительно ступицы 12, как указано ниже. Второй сегмент 18 и рули 26, 28 могут включать в себя кольца 34, 35, которые принимают первый штифт 30 и/или второй штифт 32 и которые избирательно вращаются вокруг первого штифта 30 и/или второго штифта 32. В конфигурации, показанной на фигурах, рули 26, 28 включают в себя кольца 34, которые принимают первый штифт 30 и второй штифт 32, соответственно. Второй сегмент 18 включает в себя кольца 35, которые принимают первый штифт 30 и второй штифт 32, соответственно.
Первый штифт 30 и второй штифт 32 могут перемещаться относительно ступицы 12 между блокированным положением и по меньшей мере одним разблокированным положением. В заблокированном положении, как показано на фиг. 10А и 11А, первый штифт 30 и второй штифт 32 предотвращают перемещение второго сегмента 18 и рулей 26, 28 относительно ступицы 12. В по меньшей мере одном разблокированном положении второй сегмент 18 и/или рули 26, 28 могут вращаться относительно ступицы 12. В частности, штифты 30, 32 могут быть перемещены в первое разблокированное положение, как показано на фиг. 10B–10D и 11B–11D, и могут быть перемещены во второе разблокированное положение, как показано на фиг. 10E–10G и 11E–11G. В первом разблокированном положении второй сегмент 18 может свободно вращаться вокруг ступицы 12, а рули 26, 28 заблокированы относительно ступицы 12, то есть не вращаются относительно ступицы 12. Во втором разблокированном положении рули 26, 28 могут свободно вращаться вокруг ступицы 12, а второй сегмент 18 заблокирован относительно ступицы 12.
Как показано на фиг. 6, 10А–G и 11А–G, каждый штифт 30, 32 может включать в себя штырь 52. Штифт 30, 32 может включать в себя по меньшей мере одну шпонку 31, 33, прикрепленную к штырю 52 для зацепления с кольцами 34, 35 и/или ступицей 12. Например, штифт 30, 32 может включать в себя первую шпонку 31 и вторую шпонку 33, расположенные на расстоянии друг от друга в осевом направлении вдоль штифта 52. Первая шпонка 31 и вторая шпонка 33 могут иметь любую подходящую форму и могут быть сформированы одинаково друг с другом или отличаться друг от друга. В качестве примера первая шпонка 31 и вторая шпонка 33 имеют цилиндрический центральный стержень 65 и два плоских выступа 67, проходящих в противоположных направлениях от цилиндрического центрального стержня 65. Два плоских выступа 67 могут быть параллельны друг другу, как показано на фигурах, или могут быть расположены под углом друг к другу. Угловое положение двух плоских выступов 67 относительно друг друга определяет относительное положение первого сегмента 16, второго сегмента 18 и рулей 26, 28 вокруг осей A1, A2 вращения.
В варианте осуществления по фиг. 1–10А и, в частности, со ссылкой на фиг. 6, каждый штифт 30, 32 может включать в себя головку 36. Головка 36 может иметь любую подходящую форму, например коническую форму, как показано на фиг. 6. Головка 36 может иметь размер и форму, чтобы позволить пользователю вытаскивать штифты 30, 32 в осевом направлении из ступицы 12 между заблокированным положением и первым и вторым разблокированными положениями, как изложено ниже. В заблокированном положении головка 36 может упираться в ступицу 12. Каждый штифт 30, 32 может включать в себя буртик 37, проходящий от головки 36.
Продолжая ссылаться на вариант осуществления, показанный на фиг.1–1-A, штифт 30, 32 может включать в себя пластину 36, расположенную на расстоянии от головки 36 в осевом направлении вдоль штыря 52. Пластина 36 может находиться на конце штифта 30, 32 напротив головки 36.
Со ссылкой на фиг. 7 и 10А–10G, кольца 34 рулей 26, 28 включают в себя отверстие 51 и замочную шпоночный паз 49. Как показано на фиг. 10А, в заблокированном положении отверстие 51 принимает буртик 37 штифта 30, 32, а шпоночный паз 49 принимает вторую шпонку 33 (а шпоночный паз 53 ступицы 12 принимает первую шпонку 31), чтобы заблокировать рули 26, 28 на ступице 12. Как показано на фиг. 10А–10D, в первом заблокированном положении шпоночный паз 49 принимает вторую шпонку 33 (а шпоночный паз 53 ступицы 12 принимает первую шпонку 31) для блокировки рулей 26, 28 на ступице 12. Как показано на фиг. 10E–G, во втором разблокированном положении отверстие 51 принимает вторую шпонку 33, позволяющий рулям 26, 28 вращаться относительно ступицы 12 вокруг осей A1, A2 вращения. Шпоночный паз 49 может иметь одинаковую форму со второй шпонкой 33.
Со ссылкой на фиг. 8 и 10А–10G кольца 35 второго сегмента 18 включают в себя первый шпоночный паз 43, второй шпоночный паз 45 и отверстие 47, разделяющее первый шпоночный паз 43 и второй шпоночный паз 45. Штырь 52 проходит через отверстие 47, а первая шпонка 31 и вторая шпонка 33 находятся на противоположных сторонах отверстия 47. Как показано на фиг. 10А, в заблокированном положении второй шпоночный паз 45 принимает вторую шпонку 33 для блокировки второго сегмента 18 на ступице 12. В первом разблокированном положении, как показано на фиг. 10В–D, первая шпонка 31 выходит из зацепления с первым шпоночным пазом 43, а вторая шпонка 33 выходит из зацепления со вторым шпоночным пазом 45, чтобы второй сегмент 18 мог вращаться относительно рулей 26, 28 и ступицы 12. Во втором разблокированном положении, как показано на фиг. 10E–G, первая шпонка 31 входит в зацепление с первым шпоночным пазом 43 и шпоночным пазом 53 ступицы 12 для блокировки второго сегмента 18 на ступице 12. Первый шпоночный паз 43 может иметь одинаковую форму с первой шпонкой 31, а второй шпоночный паз 45 может иметь одинаковую форму со второй шпонкой 33.
В варианте осуществления на фиг. 11А–11G первый сегмент 16 и второй сегмент 18, включая кольца 35, идентичны тем, которые показаны на фиг. 10А–10G. Рули 26, 28 варианта осуществления 11А–11G включают в себя закрытые колпачки (не пронумерованы), которые закрывают отверстие 51 и шпоночный паз 49 кольца 34 рулей 26, 28.
Блокировочный механизм 61 может разъемно фиксировать раму 14 относительно ступицы 12. Например, первый сегмент 16 и/или второй сегмент 18 могут вращаться относительно ступицы 12 и относительно друг друга между двумя или более положениями, например, положением тележки, показанным на фиг. 1–2, и положением ручной тележки, показанный на фиг. 3, положением грузовой тележки, показанным на фиг. 4, и сложенным положением, показанным на фиг. 5. Блокировочный механизм 61 может разъемно фиксировать первый сегмент 16 и/или второй сегмент 18 относительно ступицы 12. Другими словами, блокировочный механизм 61 может автоматически перемещать штифты 30, 32 в заблокированное положение, как показано на фиг. 10А и 11А.
В качестве одного примера блокировочный механизм 61 может приводиться в действие механическим способом. В качестве одного примера, как показано на фиг. 10А–10G, блокировочный механизм 61 может включать в себя пластину 39, штырь 65 и пружину 41 в полости 59 ступицы 12. Пружина 41 удерживается в полости 59 между пластиной 39 и стенкой 57. Пружина 41 смещает штифт 30, 32 в положение блокировки. В частности, пружина 41 смещает пластину 39 от стенки 57, которая смещает торцевую пластину 36 к соответствующему рулю 26, 28. Пользователь может перемещать штифт 30, 32 из заблокированного положения в первое и второе разблокированные положения, захватывая торцевую пластину 36 и вытягивая штифт 30, 32 от соответствующего руля 26, 28, чтобы преодолеть смещение пружины 41.
В качестве другого примера блокировочный механизм 61 может приводиться в действие электронным способом. В качестве другого примера блокировочный механизм может представлять собой электромагнит 63, соединенный со штифтом 30, 32 для перемещения штифта 30, 32 между заблокированными, первым разблокированным и вторым разблокированными положениями. В качестве другого примера блокировочный механизм 61 может быть одним или несколькими электромагнитами, расположенными в ступице 12 и/или на штифте 30, 32 для перемещения штифта 30, 32 между заблокированным, первым разблокированным и вторым разблокированными положениями.
Торцевые пластины 36 могут также поддерживать и/или направлять тележку 10, когда тележка загружается в место хранения, например, могут вращаться посредством электродвигателя. Рама 14 может включать в себя функцию бампера, например, включающую в себя преобразователь давления, который запускает разблокировку рамы 14 и ступицы 12, когда тележка 10 приближается к транспортному средству. Во избежание непреднамеренного складывания, функция бампера может быть запрограммирована только на то, чтобы рули 26, 28 были сначала перемещены в опущенное, например, горизонтальное положение.
На фиг. 10А–10G и 11А–11G показаны различные перемещения штифта 30, 32 между заблокированным, первым разблокированным и вторым разблокированными положениями, а также различные перемещения первого сегмента 16, второго сегмента 18 и рулей 26, 28 между положением тележки/положением ручной тележки, положением грузовой тележки и сложенным положением. На фиг. 10А штифт 32 находится в заблокированном положении, а рама 14 и ручки 26, 28 находятся в положении корзины / ручной тележки.
На фиг. 10В и 11В штифт 32 находится в первом разблокированном положении, в котором первая шпонка 31 и вторая шпонка 33 выходят из зацепления с первым шпоночным пазом 43 и вторым шпоночным пазом 45, соответственно, позволяя второму сегменту 18 вращаться вокруг соответствующей оси A1, A2 из положения тележки/положения ручной тележки в положение грузовой тележки/сложенное положение. На фиг. 10B–D и 11B–D показано поступательное перемещение второго сегмента 18, вращающегося вокруг соответствующей оси A1, A2 из положения тележки/положения ручной тележки в положение грузовой тележки/сложенное положение.
На фиг. 10Е и 11Е показана шпонка 32 во втором разблокированном положении, в котором первая шпонка 31 входит в зацепление с первым шпоночным пазом 43 кольца 35 и шпоночным пазом 53 ступицы, а вторая шпонка 33 находится в отверстии 51, что позволяет рулю 28 вращаться вокруг соответствующей оси A1, A2 из положения тележки/положения ручной тележки в положение грузовой тележки/сложенное положение. На рисунках 10E–G и 11E–G показано поступательное перемещение руля 28, вращающейся вокруг соответствующей оси A1, A2 из положения тележки/положения ручной тележки в сложенное положение.
Со ссылкой на фиг. 1–5 первый сегмент 16 рамы 14 может включать в себя по меньшей мере один рычаг 38, соединенный с возможностью вращения со ступицей 12. Например, как показано на фигурах, первый сегмент 16 может включать в себя два рычага 38, каждый из которых включает в себя кольцо 34, соединенное с возможностью вращения со ступицей 12.
Продолжая ссылаться на фиг. 1–5, корпус 40 может проходить между рычагами первого сегмента 16 и соединять их. Корпус 40 может содержать батарейный отсек. Рычаги и корпус 40 могут быть выполнены из любого подходящего материала, например алюминия, стали, композиционных материалов, таких как термопластик, армированный углеродным волокном, и т.д.
Первый сегмент 16 включает в себя, по меньшей мере, одну вилку 42, соединенную с одним из колес 20. Например, два рычага 38 определяют вилку 42, принимающую колесо 20.
Продолжая ссылаться на фиг. 1–5, второй сегмент 18 может включать в себя по меньшей мере один рычаг 44, соединенный с возможностью вращения со ступицей 12. Например, как показано на фигурах, второй сегмент 18 может включать в себя два рычага 44, каждый из которых включает в себя кольцо 35, соединенное с возможностью вращения со ступицей 12. Рычаги 44 могут быть расположены на расстоянии друг от друга вдоль ступицы 12. Рычаги 44 могут перемещаться вместе как блок относительно ступицы 12. Например, рычаги 44 могут быть связаны в ступице 12 для передачи движения одного из рычагов 44 к другому из рычагов 44. В альтернативном варианте осуществления рычаги 44 могут перемещаться независимо относительно ступицы 12. Рычаги 44 могут быть выполнены из любого подходящего материала, например алюминия, стали, композиционных материалов, таких как термопластик, армированный углеродным волокном, и т.д.
Первый сегмент 16 и/или второй сегмент 18 могут выдвигаться, так что первый сегмент 16 и/или второй сегмент 18 могут быть удлинены для использования и отведены для разных целей использования и/или хранения. Например, рычаги 38 первого сегмента 16 и рычаги 44 второго сегмента могут каждый выдвигаться, то есть иметь один элемент, с возможностью скольжения в другом элементе. Выдвижение первого сегмента 16 и/или второго сегмента 18 может обеспечить требуемый угол наклона пассажира.
Батарея 46 может поддерживаться в батарейном отсеке корпуса 40. Батарея 46 может быть любого подходящего типа. В дополнение к, или в качестве альтернативы, аккумулятору 46 в батарейном отсеке, тележка 10 может содержать одну или несколько батарей, например, расположенных в рычагах 38, 44 и/или ступице 12.
Со ссылкой на фиг.1–4, тележка 10 может содержать фару 48. Фара 48 может быть соединена с возможностью вращения со ступицей 12 и может вращаться относительно ступицы 12. Например, фара 48 может включать в себя втулку, которая принимает ступицу 12 и световые приборы, установленные на втулке. Световые приборы могут иметь электрическую связь с батареей 46. Например, фара 48 может быть перемещена в первое положение, чтобы указывать в сторону от пассажира, сидящего на седле 24, например, как показано на фиг. 1 и 2. В качестве другого примера фара 48 может быть перемещена во второе положение, чтобы указывать в сторону от пассажира за вторым сегментом 18, когда тележка 10 находится в положении ручной тележки, показанной на фиг. 3.
Седло 24 может быть закреплено с возможностью перемещения на первом сегменте 16 рамы 14. Как показано на фиг. 2–3, первый сегмент 16 может включать в себя направляющую 50, которая принимает седло 24. В частности, седло 24 может включать в себя стойку 52, принимаемую направляющей 50, и платформу 54, прикрепленную к стойке 52. Как показано на фиг. 12, храповой механизм может быть расположен между седлом 24 и первым сегментом 16 рамы 14. В качестве одного примера, как показано на фиг. 12, первый сегмент 16 может включать в себя ряд зубцов 56 в первом сегменте 16, а стойка 52 седла 24 может включать в себя штифт 58, который разъемно входит в зацепление с рядом зубцов 56. Штифт 58 может быть подпружинен.
Как показано на фиг. 12, первый сегмент 16 может включать в себя вторую направляющую 69, а седло 24 может включать в себя второй штифт 71, принимаемый с возможностью скольжения во второй направляющей 69. Вторая направляющая 69 расположена на расстоянии от направляющей 50, а второй штифт 71 расположен на расстоянии от штифта 58. Зацепление второго штифта 71 во второй направляющей 69 позволяет седлу 24 скользить вдоль первого сегмента 16, когда штифт 58 выходит из зацепления с зубьями 56.
Седло 24 может иметь конфигурацию двустворчатой раковины. В частности, седло 24 может включать в себя основание 60 и два удлинителя 62, подвижные относительно основания 60. Удлинители 62 могут быть выдвинуты относительно основания 60 в выдвинутое положение, как показано на фиг. 3, и могут быть втянуты относительно основания 60 в отведенное положение, как показано на фиг. 1, 2 и 5. В выдвинутом положении седло 24 может работать как платформа для поддержки груза. В отведенном положении седло 24 может работать как сиденье для пассажира. Удлинители 62 могут складываться и/или скользить относительно основания 60 между выдвинутым положением и отведенным положением. Седло 24 может включать в себя ручку, предназначенную для помощи в загрузке тележки 10 в место для хранения, например транспортное средство.
Удлинители 62 могут включать в себя первую поверхность 64, которая открывается, когда удлинители 62 находятся в выдвинутом положении, и вторую поверхность 66, которая открывается, когда удлинители 62 находятся в отведенном положении. В отведенном положении первая поверхность 64 каждого удлинителя 62 упирается в основание 60. Первая поверхность 64 скрыта, когда удлинители 62 находятся в отведенном положении, и пассажир тележки 10 не входит в контакт с первой поверхностью 64 и, следовательно, не подвергается воздействию грязи, загрязнений и т.д., которые могут накапливаться на первой поверхности 64 во время транспортировки груза. В выдвинутом положении первые поверхности 64 удлинителей 62 могут быть параллельны верхней поверхности основания 60, как показано на фиг. 3. Первая поверхность 64 и вторая поверхность 66 могут быть выполнены из разных материалов и/или могут быть покрыты различными материалами.
Удлинители 62 могут быть соединены с основанием 60 любым подходящим способом. Например, удлинители 62 могут быть шарнирно прикреплены к основанию 60, например, с помощью механического шарнира, гибкого шарнира и т.д.
Тележка 10 может включать в себя одну или несколько подножек 68, шарнирно соединенных со ступицей колес 20. В альтернативном варианте осуществления подножки 68 могут быть шарнирно соединены с рычагами 38 первого сегмента 16 и/или второго сегмента 18. Подножки 68 могут складываться относительно рамы 14, как показано на фиг. 3 и 5, и могут раскладываться, как показано на фиг. 1 и 2.
Как показано на фигурах, тележка 10 может включать в себя три колеса 20, в частности, одно колесо на первом сегменте 16 рамы 14 и два колеса 20, то есть первое колесо 70 и второе колесо 72, на втором сегменте 18 рамы 14. Другими словами, в этой конфигурации тележка 10 может представлять собой трицикл. В альтернативном варианте осуществления тележка 10 может включать в себя любое подходящее количество колес 20.
Рама 14 может быть выполнена с возможностью изменения положения колес 20 на 180 градусов, то есть для приложения мощности в обратном направлении посредством изменения положения колес 20 относительно рамы. Например, рычаги 38 первого сегмента 16 и рычаги 44 второго сегмента 18 могут быть выполнены с возможностью изменения положения колес 20. В этой конфигурации тележка 10 может работать в первом режиме, когда колеса 20 находятся в первом положении относительно рамы 14 и может работать во втором режиме, когда колеса 20 находятся во втором положении относительно рамы 14. Система 90 управления тележкой 10, как указано ниже, может переключаться между этими режимами, когда изменяют положение колеса 20.
Колеса 20 могут быть любого подходящего типа. Колеса 20 могут обеспечивать линейное перемещение тележки 10 и/или могут обеспечивать нелинейное перемещение тележки 10. В качестве одного примера колеса 20 могут быть роликом или колесом, которое поступательно перемещается и вращается в нескольких степенях свободы. В качестве другого примера, колеса 20 могут управляться системой управления с помощью наклона. Система управления с помощью наклона может иметь фиксированное заднее колесо.
Как указано выше, по меньшей мере один двигатель 22 соединен по меньшей мере с одним колесом 20. Двигатель 22 приводит в движение по меньшей мере одно из колес 20. Другими словами, одно или более колес 20 могут приводиться в движение, например, с помощью электрического привода. В частности, колеса 20 могут включать в себя ступицу 12, двигатель 22, закрепленный на ступице 12, и шину, закрепленную на двигателе 22. Двигатель 22 может приводить в движение шину относительно ступицы 12 для приведения в движение тележки. Двигатель 22 может быть электродвигателем 22 или любым другим подходящим типом двигателя 22. В качестве одного примера два колеса 20 на втором сегменте 18 рамы 14 могут приводиться в движение, а одно колесо на первом сегменте 16 рамы 14 может свободно вращаться, то есть без механического привода. Как указано выше, двигатели 22 двух колес 70, 72 на втором сегменте 18 рамы 14 могут независимо управляться.
Тележка 10 может включать в себя два руля, то есть первый руль 26 и второй руль 28. Рули 26, 28 выполнены с возможностью подачи команды регулирования тяги и торможения на двигатель 22. Например, пользовательский ввод на первом руле 26 может обеспечивать подачу команды регулирования тяги и торможения на двигатель 22 первого колеса 70, а пользовательский ввод на втором руле 28 может обеспечивать подачу команды регулирования тяги и торможения на двигатель 22 второго колеса 72. Как указано ниже, один или более датчиков могут воспринимать перемещение и/или усилие на первом руле 26 и втором руле 28. Например, первый датчик 74 может воспринимать перемещение и/или усилие на первом руле 26, а второй датчик 76 может воспринимать перемещение и/или усилие на втором руле 28. Первый датчик 74 и второй датчик 76 могут представлять собой, например, потенциометр 78 (как изложено ниже), преобразователь силы 80 (как указано ниже) или любой подходящий тип датчика.
В качестве одного примера рули 26, 28 могут вращаться вокруг ступицы 12, а потенциометр 78 может быть расположен между каждым рулем 26, 28 и ступицей 12, чтобы обнаруживать величину перемещения каждого руля 26, 28 относительно ступицы 12. Двигатель 22 первого колеса 70 может управляться на основании обнаруженной величины и направления перемещения первого руля 26, а двигатель 22 второго колеса 72 может управляться на основании обнаруженной величины и направления перемещения второго руля 28. Например, когда первый руль 26 перемещается к пользователю, двигатель 22 первого колеса 70 может приводиться в действие в прямом направлении пропорционально величине перемещения первого руля 26. Аналогичным образом, когда второй руль 28 перемещается к пользователю, двигатель 22 второго колеса 72 может приводиться в действие в прямом направлении пропорционально величине перемещения второго руля 28. Когда первый руль 26 и второй руль 28 перемещаются от пользователя, двигатели 22 первого колеса 70 и второго колеса 72, соответственно тормозятся пропорционально величине перемещения первого руля 26 и второго руля 28, соответственно. Рулевое управление тележки 10 можно контролировать посредством перемещения первого руля 26 и второго руля 28 относительно друг друга.
В качестве другого примера первый руль 26 и второй руль 28 могут быть закреплены относительно ступицы 12, а преобразователь 80 усилия может поддерживаться в каждом из первого руля 26, второго руля 28 и ступицы 12. Преобразователи 80 усилия могут измерять величину усилия, прилагаемого к первому рулю 26, и величину усилия, прилагаемого ко второму рулю 28, а двигатели 22 первого колеса 70 и второго колеса 72 могут управляться в зависимости от направления и величины усилия, приложенного к первому рулю 26 и второму рулю 28.
В качестве другого примера вращающаяся рукоятка 82 может быть закреплена с возможностью вращения на первом руле 26 и втором руле 28. Двигатели 22 первого колеса 70 и второго колеса 72 могут управляться на основании направления и величины вращения рукояток 82 относительно первого руля 26 и второго руля 28, соответственно. Направление и величина вращения рукояток 82 могут быть обнаружены потенциометром 78. В качестве альтернативы вращению рукояток 82 рукоятки 82 могут быть неподвижными относительно рулей 26, 28, а двигатели 22 могут управляться на основании усилия на рулях 26, 28, измеряемого преобразователем 80 усилия. Рукоятки 82 могут проходить в поперечном направлении к рулям 26, 28 или могут проходить в осевом направлении с рулями 26, 28.
В качестве альтернативы захватам 82 на первом руле 26 и втором руле 28, управляющим двигателями 22 первого колеса 70 и второго колеса 72, соответственно, рули 26, 28 могут управлять одним из торможения и ускорения, а рукоятки 82 могут управлять другим из торможения и ускорения. Например, перемещение/усилие на рулях 26, 28 может управлять одним из ускорения и торможения двигателей 22, а перемещение/усилие на рукоятках 82 может управлять другим из ускорения и торможения.
Как показано на фиг. 13, тележка 10 может включать в себя один или несколько датчиков, запрограммированных для определения положения тележки, то есть положения езды, положения ручной тележки, положения грузовой тележки и т.д. Например, тележка 10 может включать в себя датчик 84 положения седла, запрограммированный для определения положения седла 24 относительно первого сегмента 16 рамы 14, датчик 86 положения руля, запрограммированный для определения положения рулей относительно ступицы 12 и/или датчик положения рамы 88, запрограммированный для определения положения первого сегмента 16 и/или второго сегмента 18 рамы 14 относительно ступицы 12.
Продолжая ссылаться на фиг. 13, тележка 10 может включать в себя систему 90 управления, которая управляет работой тележки 10 на основе пользовательского ввода. Система 90 управления включает в себя память и процессор 92. Память может хранить команды, исполняемые процессором 92.
Как показано на фиг. 10, процессор 92 может быть запрограммирован на прием сигнала от датчика 84 положения седла (блок 102), сигнала от датчика 86 положения руля (блок 104) и сигнала датчика 88 положения рамы (блок 106). Со ссылкой на блок 108, процессор 92 может быть запрограммирован на определение положения тележки, то есть положения езды, положения ручной тележки, положения грузовой тележки и т.д., основанного по меньшей мере на сигнале от датчика 84 положения седла, датчика 86 положения руля и/или датчика 88 положения рамы. Со ссылкой на блок 110, процессор 92 может быть запрограммирован на прием входного сигнала от первого датчика 74 и второго датчика 76.
Со ссылкой на блок 112, процессор 92 может быть запрограммирован на управление первым двигателем 22 и вторым двигателем 22 на основании по меньшей мере положения тележки 10 и сигналов от первого датчика 74 и/или второго датчика 76. В частности, как указано выше, первый датчик 74 и второй датчик 76 могут воспринимать перемещение первого руля 26 и второго руля 28/усилие на первом руле 26 и втором руле 28, соответственно. Процессор 92 может быть запрограммирован на регулирование тяги и торможение двигателей 22 первого колеса 70 и второго колеса 72 на основании по меньшей мере входного сигнала от первого датчика 74 и второго датчика 76.
Процессор 92 может быть запрограммирован приложение тяги в обратном направлении, когда тележка 10 перемещается в разные положения. Другими словами, в некоторых положениях тележка 10 может перемещаться вперед в первом направлении, то есть с первым сегментом 16 рамы 14 впереди второго сегмента 18. В других положениях тележка 10 может перемещаться вперед во втором направлении, то есть со вторым сегментом 18 рамы 14 впереди первого сегмента 16. Соответственно, процессор 92 может быть запрограммирован на регулирование тяги и торможение двигателей 22 первого колеса 70 и второго колеса 72 в соответствующем направлении на основании обнаружения положения тележки 10.
Процессоры, такие как процессор 92, обсуждаемые здесь в целом, каждый включают в себя команды, исполняемые одним или более процессорами, такими как указанные выше, и для выполнения блоков или этапов процессов, описанных выше. Например, блоки процесса, описанные выше, могут быть реализованы в виде машиноисполняемых команд.
В целом, описанный процессор 92 может использовать любую из ряда компьютерных операционных систем, включая, но не ограничиваясь версиями и/или разновидностями приложения Ford SYNC®, промежуточного программного обеспечения AppLink/Smart Device Link, операционной системы MICROSOFT® Automotive, операционной системы Microsoft WINDOWS®, операционной системы Unix (например, операционной системы SOLARIS®, распространяемой корпорацией Oracle Redwood Shores, Калифорния), операционной системы AIX UNIX, распространяемой International Business Machines из Армонка, штат Нью-Йорк, операционной системы Linux, операционных систем Mac OSX и iOS, распространяемых Apple Inc. из Купертино, штат Калифорния, операционной системы BlackBerry, распространяемой Blackberry, Ltd. из Ватерлоо, Канада, и операционной системы Android, разработанной Google, Inc. и Open Handset Alliance или платформы QNX® CAR для информационно-развлекательных систем, предлагаемой QNX Software Systems. Примеры процессоров включают в себя, без ограничения, бортовой компьютер, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный компьютер или карманный компьютер или другую вычислительную систему и/или устройство.
Процессоры, такие как процессор 92, обычно включают в себя машиноисполняемые команды, причем команды могут исполняться одним или более процессорами, такими как перечисленные выше. Машиноисполняемые команды могут быть скомпилированы или обработаны на основании компьютерных программ, созданных с использованием различных языков программирования и/или технологий, в том числе, без ограничения этим, по отдельности или в сочетании, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. Некоторые из этих приложений могут быть скомпилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik и т.п. В целом, процессор (например, микропроцессор) принимает команды, например, из памяти, машиночитаемого носителя и т.д. и исполняет эти команды, таким образом выполняя один или более процессов, включая один или более процессов, описанных в этом документе. Такие команды и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей.
Машиночитаемый носитель (также называемый считываемым процессором носителем) включает в себя любой энергонезависимый (например, материальный) носитель, который участвует в предоставлении данных (например, команд), которые могут быть прочитаны компьютером (например, процессором компьютера). Такой носитель может иметь различные формы, в том числе, но без ограничения этим, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое обычно представляет собой основную память. Такие команды могут передаваться одним или несколькими средствами передачи, включая коаксиальные кабели, медный провод и волоконную оптику, включая провода, которые содержат системную шину, соединенную с процессором компьютера. Общие формы машиночитаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную перфоленту, любой другой физический носитель с набором отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж памяти, или любой другой носитель, с которого компьютер может считывать информацию.
Базы данных, хранилища данных или другие устройства для хранения данных, описанные здесь, могут включать в себя различные типы механизмов для хранения, доступа и получения различных видов данных, включая иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в патентованном формате, реляционную систему управления базами данных (RDBMS) и т.д. Каждое такое устройство для хранения данных обычно входит в состав вычислительного устройства, использующего компьютерную операционную систему, такую как одна из упомянутых выше, и к нему обращаются через сеть любым одним или более из различных способов. Файловая система может быть доступна из операционной системы компьютера и может включать файлы, хранящиеся в различных форматах. RDBMS обычно использует язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и исполнения хранимых процедур, такой как упомянутый выше язык PL/SQL.
В некоторых примерах системные элементы могут быть реализованы как машиночитаемые команды (например, программное обеспечение) на одном или более процессорах (например, на серверах, персональных компьютерах и т.д.), которые хранятся на машиночитаемых носителях, связанных с ними (например, дисках, и т.д.). Компьютерный программный продукт может содержать такие команды, хранящиеся на машиночитаемом носителе для выполнения описанных здесь функций.
Настоящее изобретение было описано в иллюстративном виде, и следует понимать, что используемая терминология предназначена для использования в качестве определений для описания, а не ограничения. Многие модификации и варианты настоящего изобретения возможны в свете вышеизложенных идей, и настоящее изобретение может быть осуществлено на практике иначе, чем конкретно описано.
Реферат
Тележка включает в себя ступицу, раму и по крайней мере один руль. Рама включает в себя первый сегмент и второй сегмент, причем первый сегмент, второй сегмент и руль закреплены на ступице. Ступица определяет ось вращения, и по меньшей мере два из первого сегмента, второго сегмента и руля вращаются вокруг оси вращения относительно друг друга и ступицы. По крайней мере одно колесо расположено на первом сегменте и по крайней мере одно колесо расположено на втором сегменте. Также тележка содержит двигатель, соединенный с по меньшей мере одним из колес и процессор, запрограммированный для управления мощностью, подводимой к двигателю, на основе пользовательского ввода с руля. При этом рама выполнена с возможностью перемещения между отдельными положениями, а процессор запрограммирован для управления мощностью, подводимой к двигателю, на основании по меньшей мере положения рамы. 2 н. и 12 з.п. ф-лы, 26 ил.
Комментарии