Усовершенствованная система управления - RU2222453C2
Код документа: RU2222453C2
Чертежи

Описание
Область изобретения
Изобретение относится к усовершенствованной системе управления для ручных средств
перевозки и особенно, хотя и не исключительно, к усовершенствованной системе управления всеми колесами для таких средств.
Ссылка на родственную заявку
Изобретение по этой
заявке особенно полезно в сочетании с изобретением, описанным в нашей предыдущей заявке на патент Австралии РР1990, поданной 26 февраля 1998 г. (наша "предыдущая заявка"), на содержание которой мы
будем ссылаться в настоящей заявке. Настоящее изобретение, однако, не ограничивается использованием в средствах перевозки той категории, которая описана в нашей предыдущей заявке.
Определения
В настоящем описании под средством перевозки подразумеваются все ручные средства перевозки основной категории, описанной в нашей предыдущей заявке.
В данном описании систему привода следует понимать как систему, включающую все формы системы привода основной категории, как описано в нашей предыдущей заявке.
Предпосылки изобретения
В
нашей предыдущей заявке описана система управления многочисленными колесами, обычно четырьмя, для небольших ручных средств перевозки, таких как тележки в супермаркете, рабочие тележки и им
подобные. В
определенных обстоятельствах необходима система компенсации, например, для того, чтобы угол поворота радиально расположенных внешних колес отличался от угла поворота радиально
расположенных внутренних
колес. Это особенно важно в таких устройствах, как тележка в супермаркете, которая может вплотную огибать углы, чтобы преодолеть проходы в супермаркете. Поэтому необходим
дифференцирующий механизм,
обеспечивающий такое перемещение без истирания покрышек колес.
Кроме того, хотя изобретение по нашей предыдущей заявке будет приводить к стабилизации движения колес, на неровной местности могут возникать удары, передаваемые от одного колеса через систему привода. При наличии компенсирующего механизма будет введена способность компенсировать ограниченное нежелательное обратное перемещение отдельного колеса или колес.
Таким образом, основной целью настоящего изобретения является компенсирующее устройство для средства перевозки (как определено выше), такое, чтобы система привода (как определено выше) обеспечивала различные радиусы поворота разных колес.
Краткое описание изобретения
С
вышеописанной и другими целями в настоящем
изобретении предлагается компенсирующее устройство для компенсации различных углов поворота колес в средствах перевозки (как определено выше), причем
средство перевозки имеет множество колес, по
крайней мере, два из которых соединены посредством системы привода (как определено выше), чтобы поворачиваться одновременно; компенсирующее устройство,
приспособленное для использования с системой
привода; компенсирующее устройство, содержащее первое поворотное устройство для вращения вокруг центральной оси, второе поворотное устройство для вращения
вокруг центральной оси, причем первое и
второе поворотные устройства соосны, и соединительное устройство, соединяющее первое и второе поворотные устройства для ограниченного относительного углового
перемещения между ними.
Предпочтительно, таким средством перевозки является тележка в супермаркете. Более предпочтительно, чтобы она имела четыре колеса, и все они были соединены посредством системы привода. Система привода, преимущественно, выполняется в виде троса, ремня, клиновидного ремня или тому подобного.
Первое поворотное устройство может быть цилиндрическим барабаном, также как и второе поворотное устройство. Предпочтительно, чтобы центральная ось выступала над вторым поворотным устройством.
Соединительное устройство может содержать штырь, закрепленный на первом поворотном устройстве и проходящий через длинную дугообразную прорезь во втором поворотном устройстве. Более предпочтительно, чтобы штырь выступал над вторым поворотным устройством.
Может быть использована нагружающая система, содержащая два, как правило, параллельных и разнесенных в пространстве, рычага, закрепленных на втором поворотном устройстве с возможностью поворота с одной его стороны и выступающих с другой стороны; пружину, соединяющую эти два рычага, центральную ось и штырь, размещенные между этими двумя рычагами и взаимодействующие с ними.
Предпочтительно, чтобы компенсирующее устройство было установлено на средстве перевозки посредством рычага, закрепленного на средстве перевозки с возможностью поворота и на компенсирующем устройстве, причем рычаг имеет пружину между ним и этим средством перевозки.
Описание чертежей
Чтобы изобретение было полностью
понятно, здесь будет описано несколько вариантов, содержащих основные
особенности настоящего изобретения, со ссылками на сопроводительные демонстрационные чертежи, в которых:
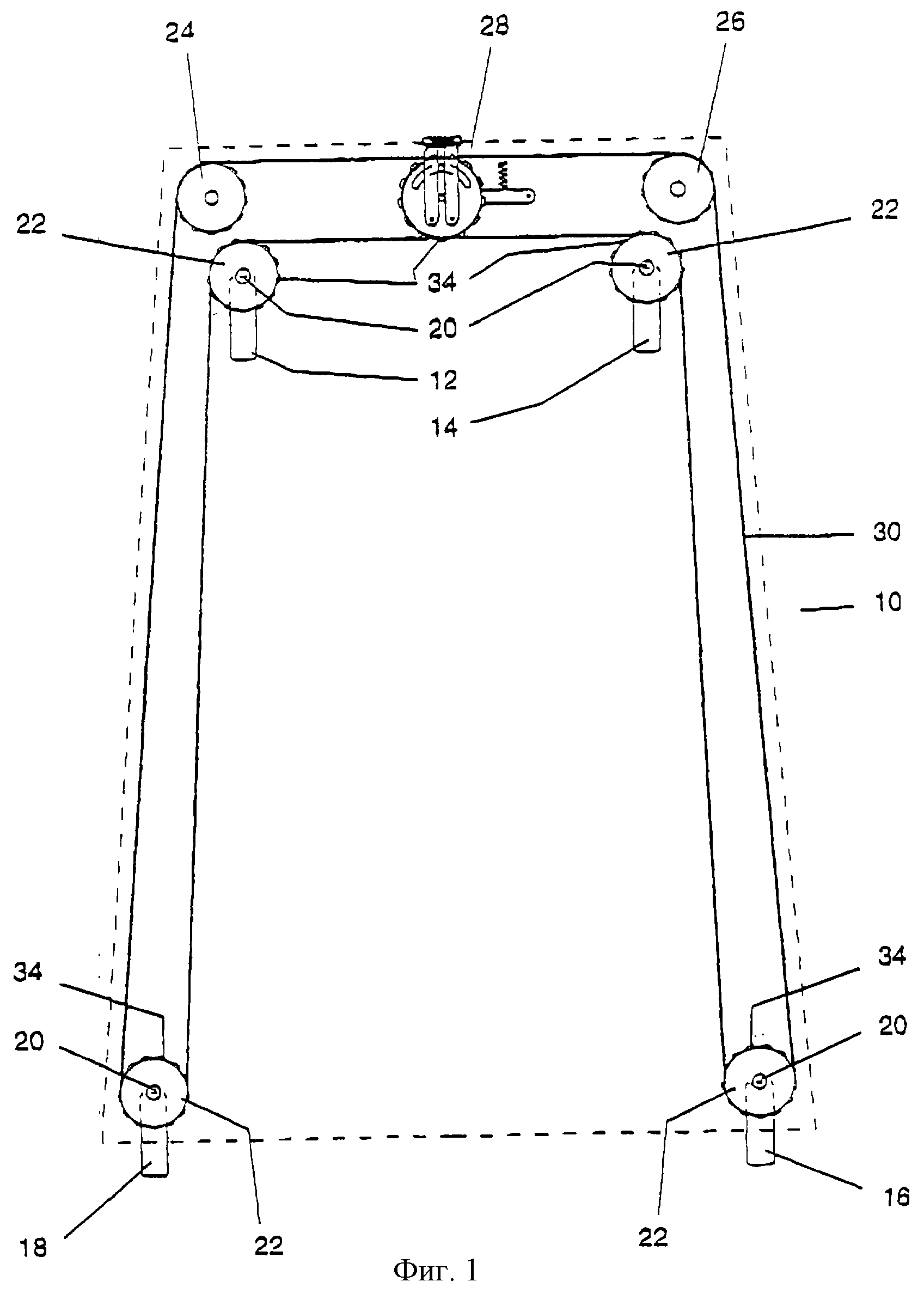
на фиг. 1
показан вид сверху компенсирующего устройства по настоящему изобретению;
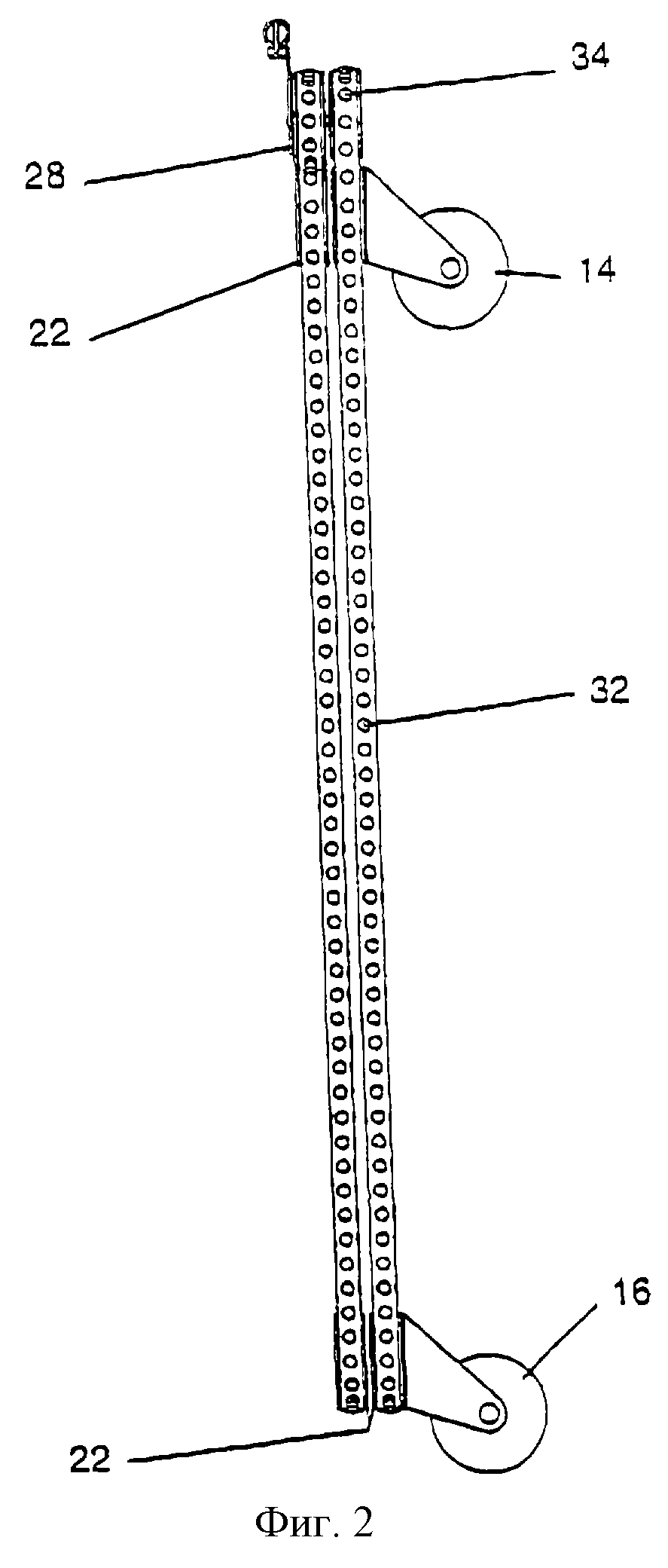
на фиг. 2 показан вид сбоку компенсирующего устройства, представленного на фиг.1;
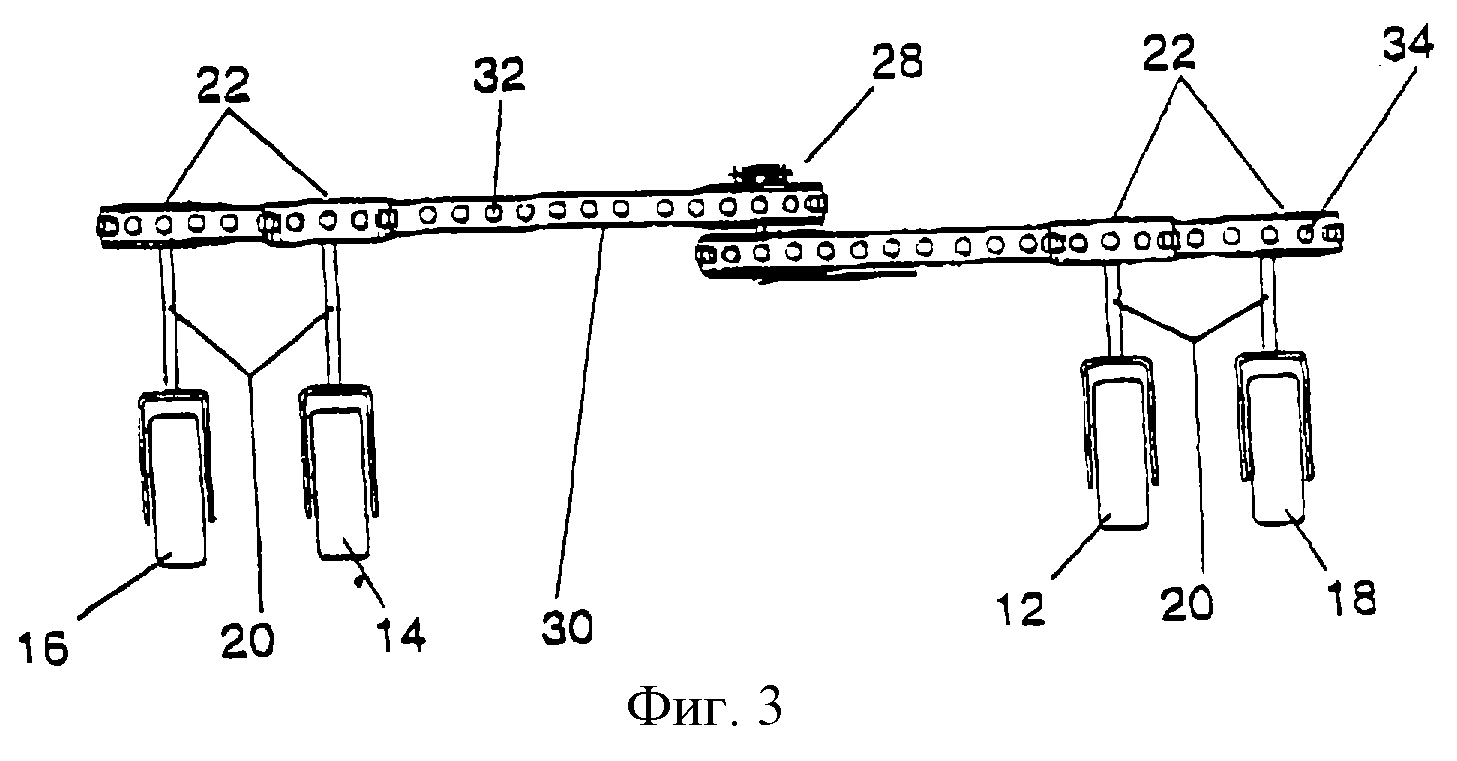
на фиг.3 показан вид
спереди компенсирующего устройства, представленного на фиг.1 и 2;
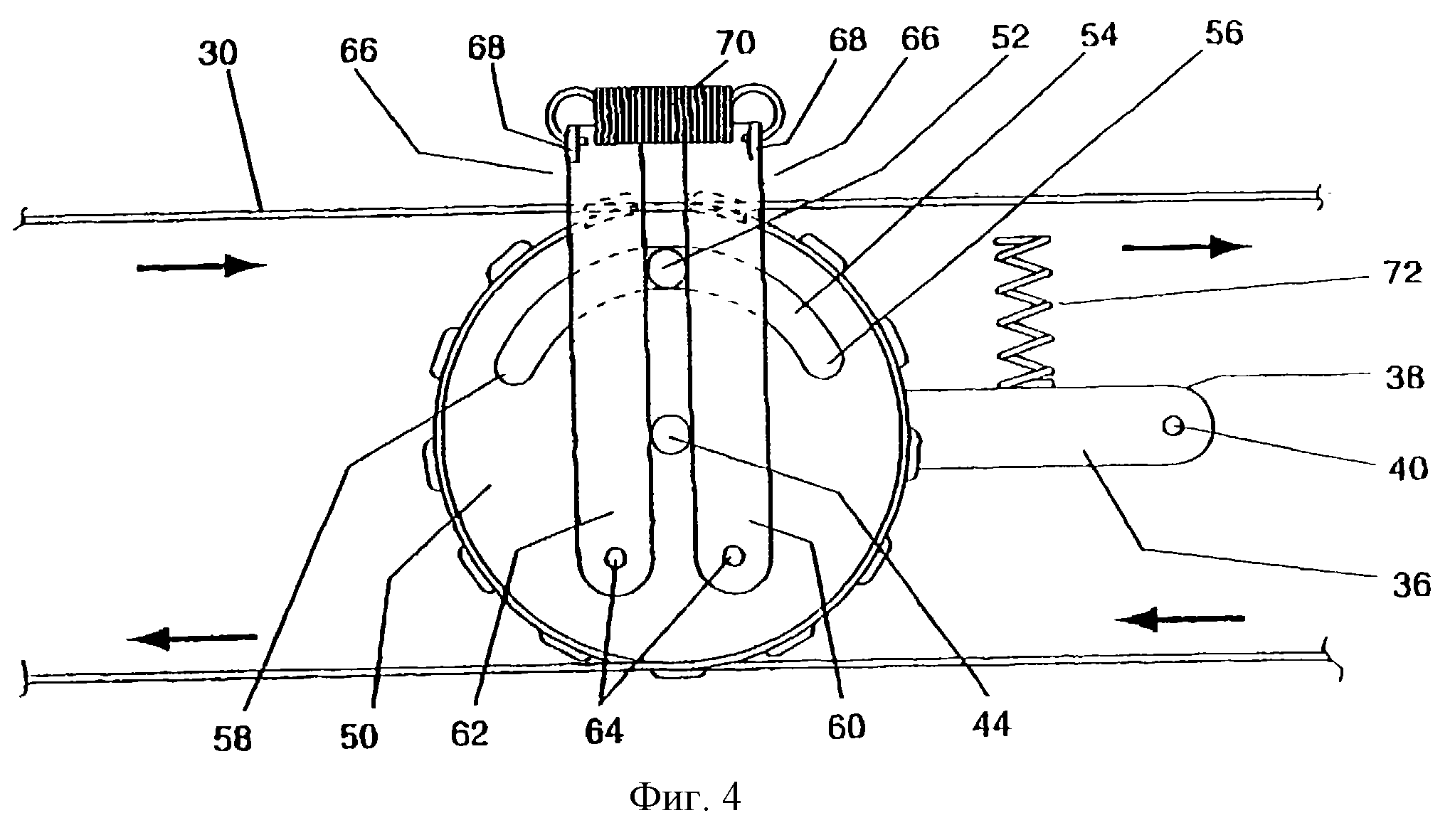
на
фиг.4 показан в увеличенном масштабе вид сверху компенсирующего устройства, представленного на фиг.1-3;
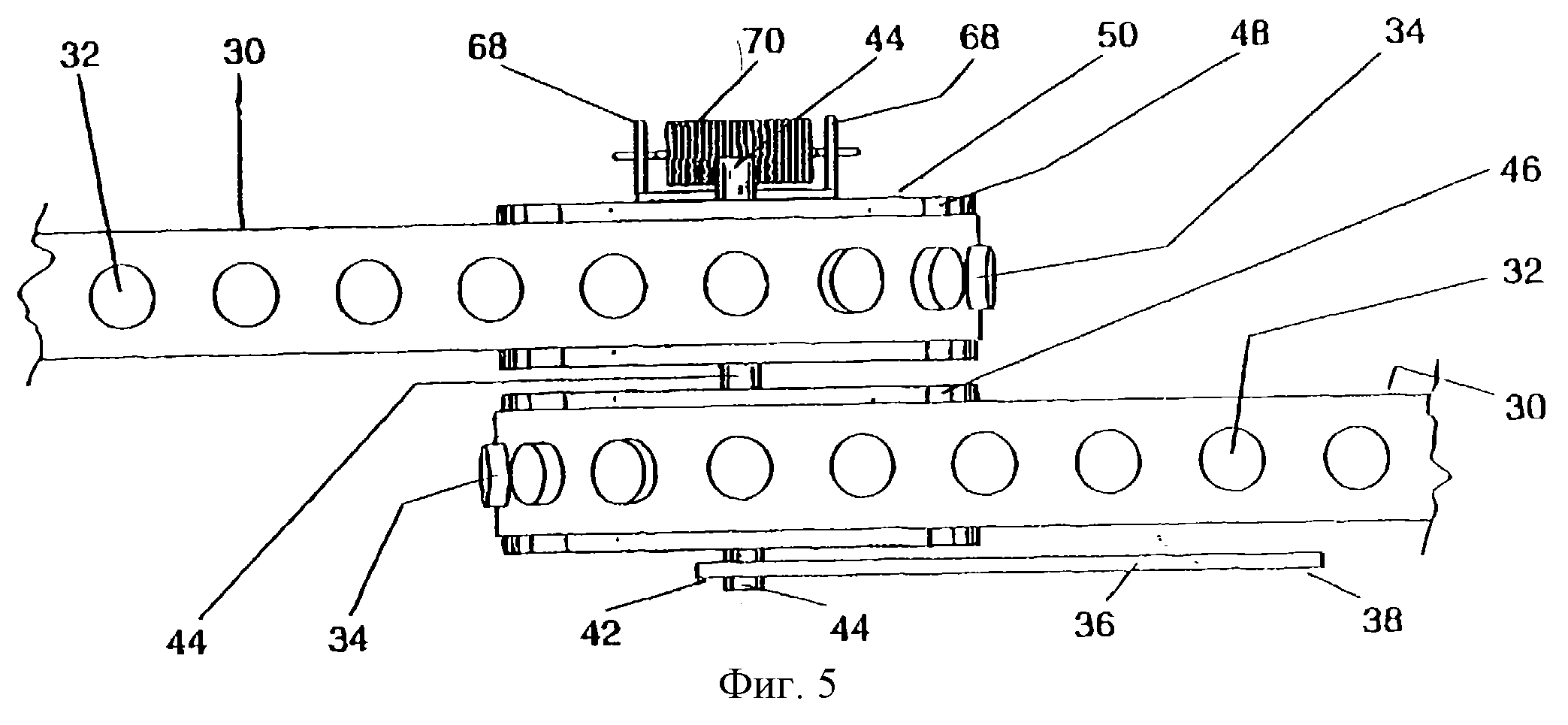
на фиг.5
представлен вид спереди, соответствующий фиг.4;
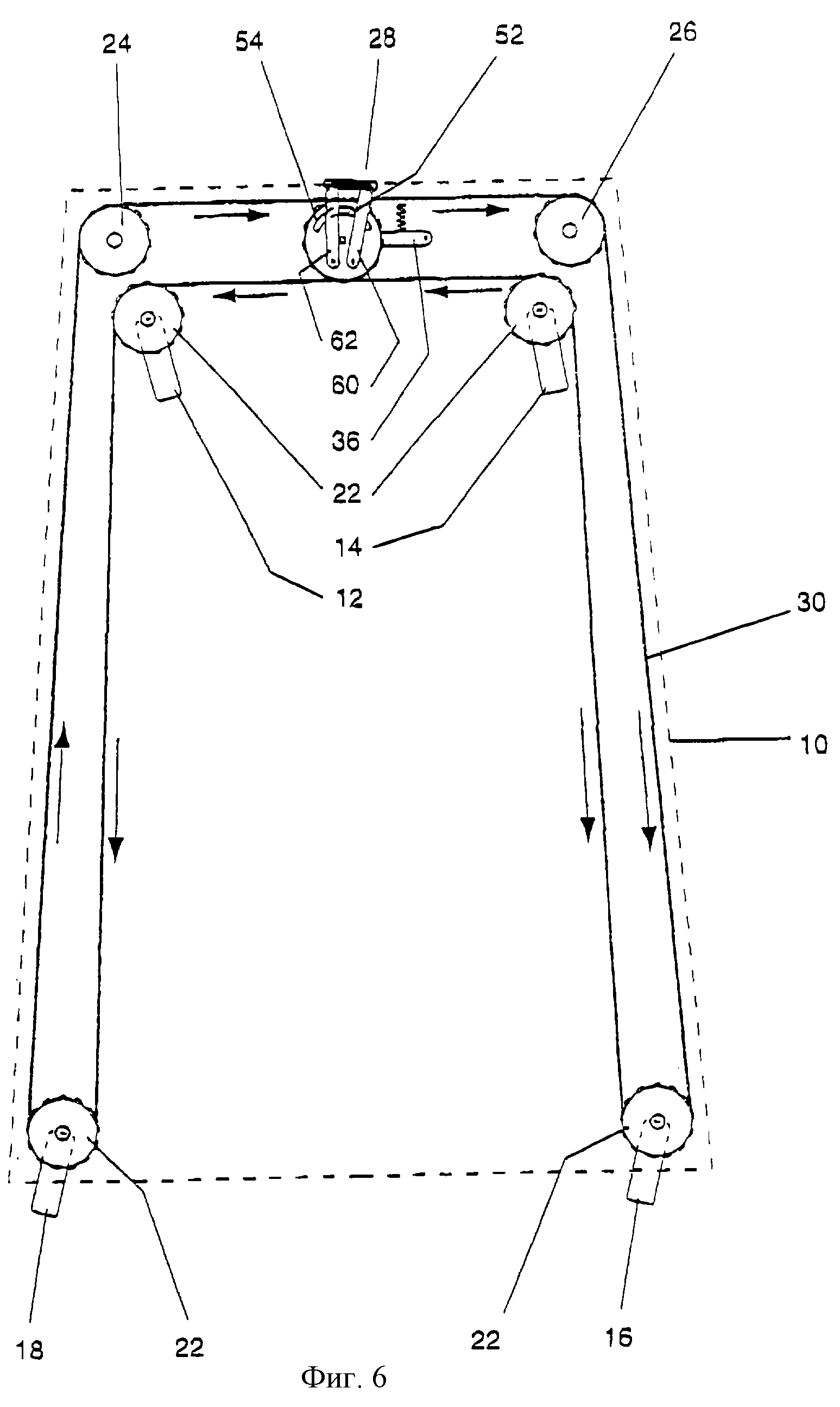
на фиг.6 представлен
вид, соответствующий фиг.1, и показывающий относительные углы при левом повороте;
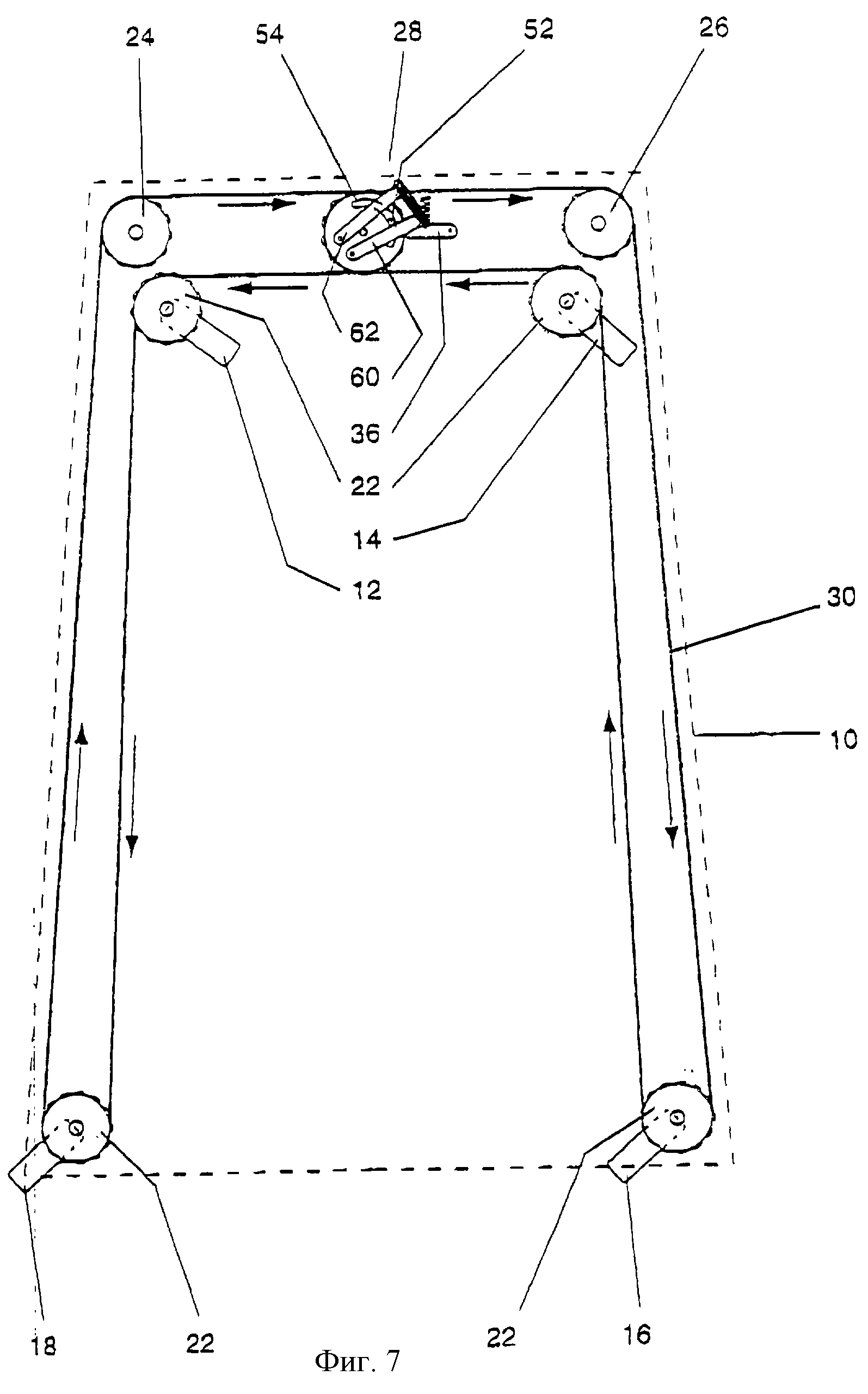
на фиг.7 представлен вид,
соответствующий фиг.6, но без указанных углов и показывающий крутой левый поворот;
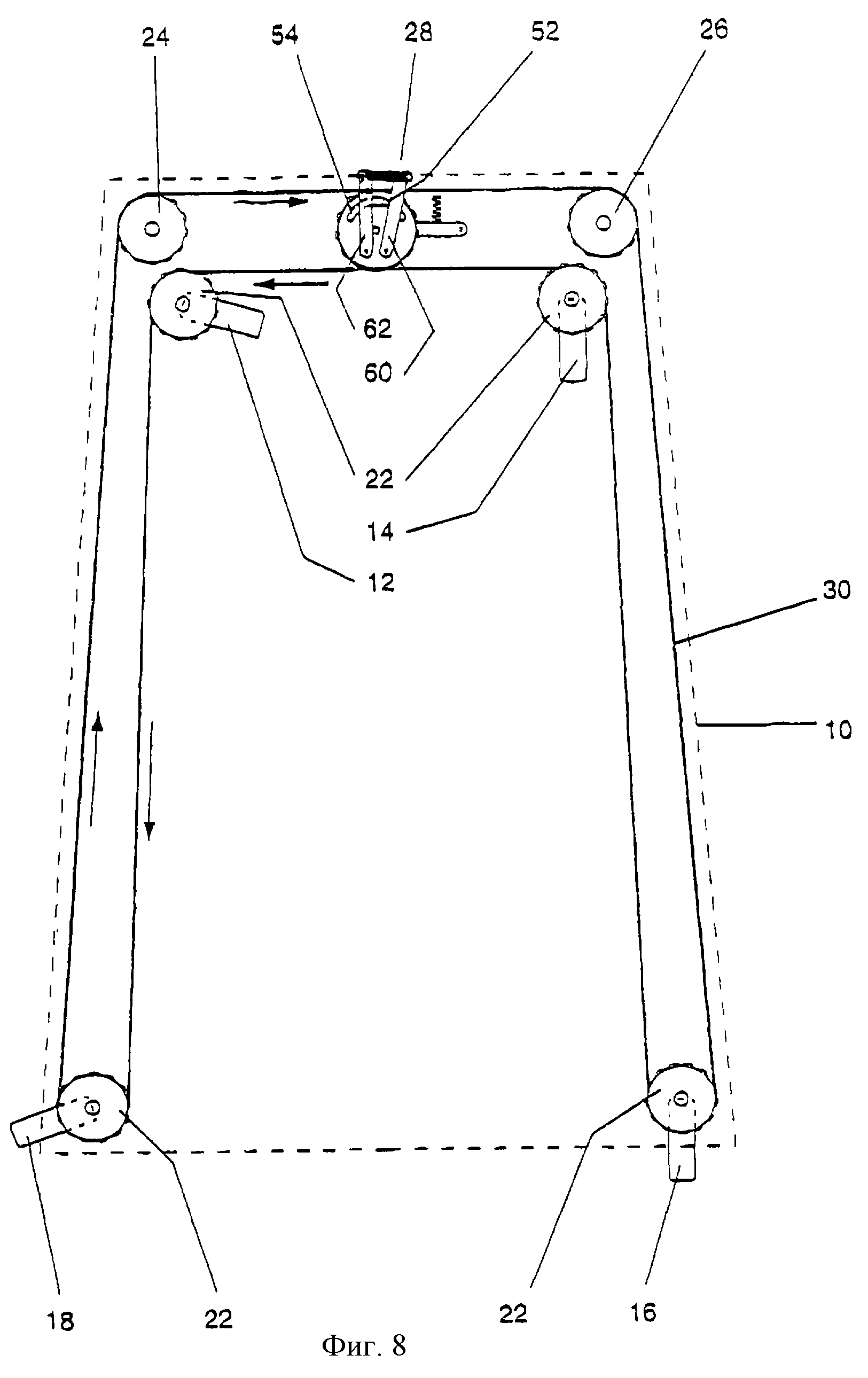
на фиг. 8 показан вид, соответствующий фиг.7, но с независимым перемещением колес;
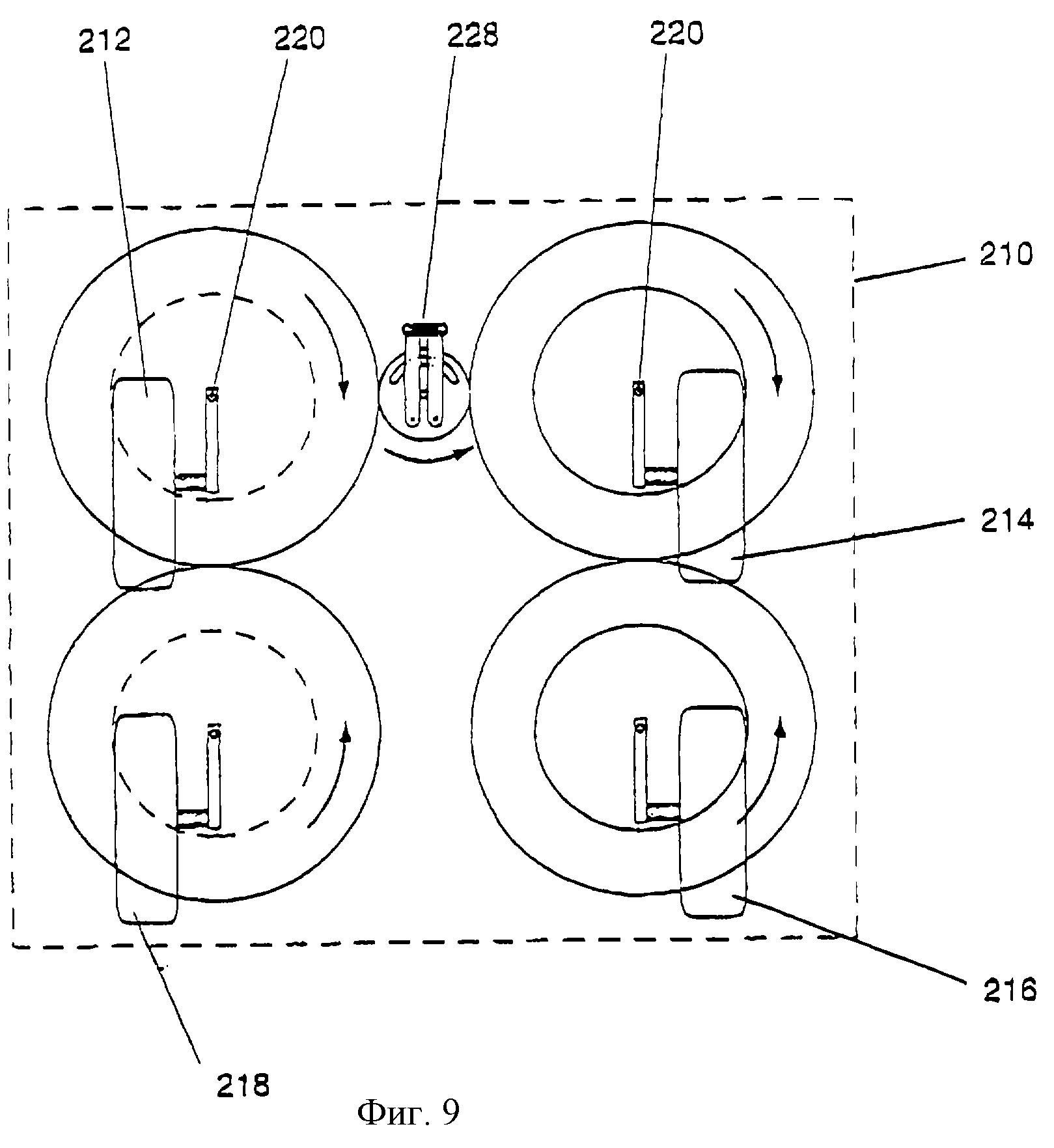
на фиг.9
приведен вид сверху второго варианта настоящего изобретения;
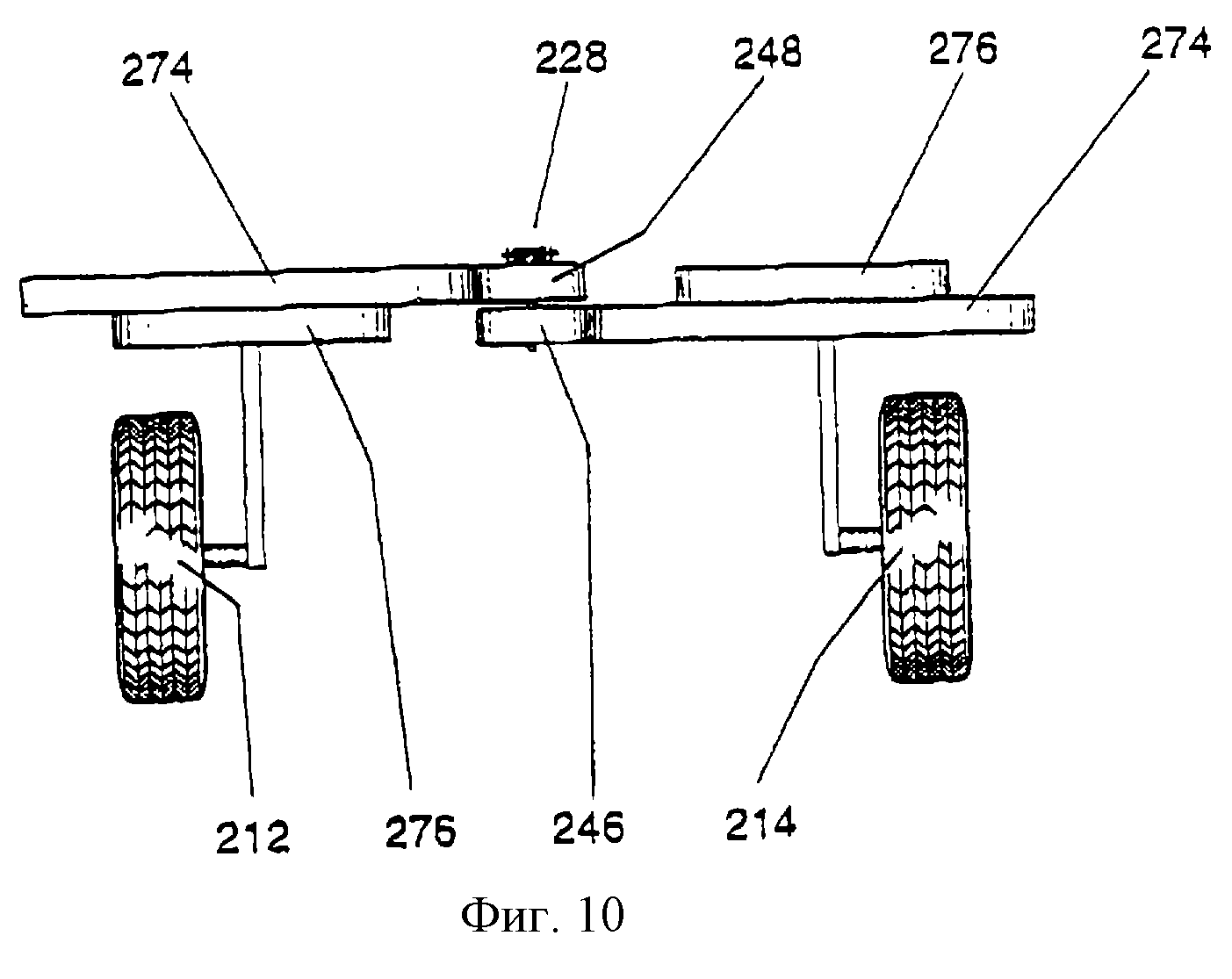
на фиг.10 показан
вид сзади варианта, представленного на фиг.9;
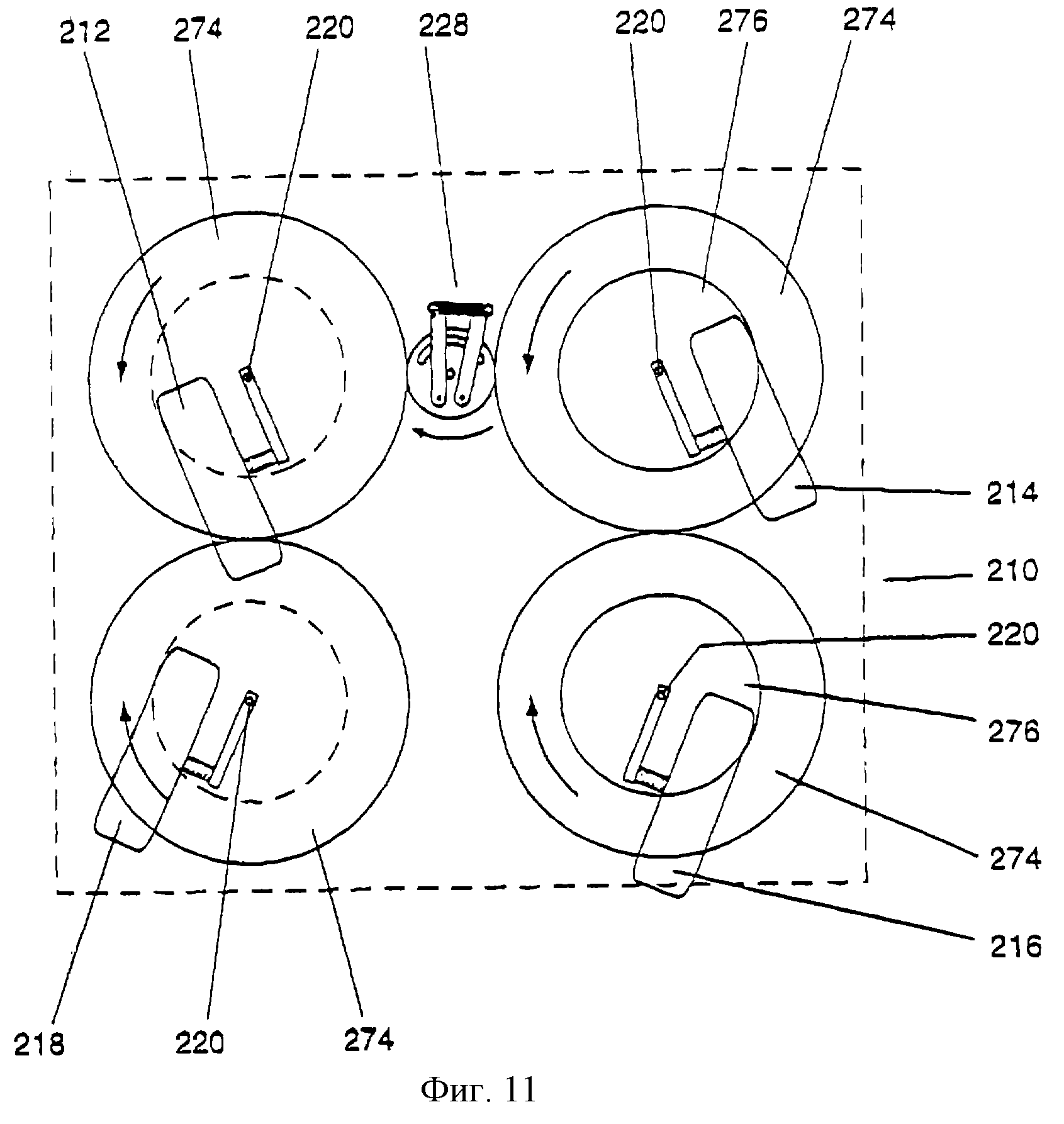
фиг.11 показывает вариант, представленный на фиг.9 и 10,
в положении левого поворота; и
на фиг. 12 приведен вид, соответствующий фиг.11,
но в положении правого поворота.
Описание предпочтительных вариантов
На фиг.1, 2 и 3
показано средство перевозки, обозначаемое как 10, которое в данном примере должно
представлять общее устройство, такое как тележка в супермаркете.
Средство перевозки 10 имеет четыре колеса 12, 14, 16 и 18, каждое из которых установлено на вертикальном вертлюге или колесной оси 20, и которая соосно закреплена на шестерне или барабане 22. Имеются две другие направляющие шестерни 24 и 26. Показано также компенсирующее устройство, обозначаемое везде как 28. Непрерывный ремень 30 огибает шестерни 22, 24, 26 и компенсирующее устройство 28 (будет описано ниже) таким образом, что осуществляется управление четырьмя колесами в соответствии с нашей предыдущей заявкой.
Ремень 30 предпочтительно выполняется в виде ремня с многочисленными равноотстоящими друг от друга отверстиями 32 по всей его длине, при этом шестерни 22, 24, 26 имеют выступы 34, предназначенные для зацепления отверстий 32 так, что ремень 30 может приводить в движение шестерни 22, 24, 26, и наоборот. Таким образом, поворот любого из колес 12, 14, 16, 18 вокруг своей оси 20 будет вызывать перемещение ремня 30 посредством шестерни 22 для этого отдельного колеса, и это заставит поворачиваться также другие шестерни 22, 24, 26 для того, чтобы осуществить управление.
На фиг. 4 и 5 представлено подробное изображение компенсирующего устройства 28. Имеется рычаг 36, который одним концом 38 прикреплен с возможностью поворота к средству перевозки 10 посредством короткого стержня 40. Другим своим концом 42 рычаг 36 жестко закреплен на центральной оси 44. На центральной оси 44 закреплено с возможностью поворота первое поворотное устройство 46, которое, как показано, является цилиндрическим барабаном с диаметром, превышающим высоту. В данном случае высота первого поворотного устройства 46 несколько больше ширины ремня 30. Первое поворотное устройство 46 имеет многочисленные выступы 34, которые предназначены для зацепления отверстий 32 на ремне 30. Поэтому перемещение ремня 30 будет вызывать вращение первого поворотного устройства 46, и наоборот.
На центральной оси 44 установлено также второе поворотное устройство 48, обычно такое же, как первое поворотное устройство 46, хотя это необязательно. Центральная ось 44 выступает над верхней поверхностью 50 второго поворотного устройства 48.
Второе поворотное устройство 48 также имеет многочисленные выступы 34, которые входят в зацепление с отверстиями 32 на ремне 30. Поэтому перемещение ремня 30 аналогично будет вызывать перемещение второго поворотного устройства 48, и наоборот. Следует отметить из фиг.1-5, что ремень 30 огибает первое поворотное устройство 46 в противоположном направлении по отношению ко второму поворотному устройству 48.
К первому поворотному устройству 46 жестко прикреплен выступающий над ним штырь 52. Штырь 52 проходит через удлиненную дугообразную прорезь 54 во втором поворотном устройстве 48. У прорези 54 есть первый конец 56 и второй конец 58. Штырь 52 выступает над верхней поверхностью 50 второго поворотного устройства 48.
На верхней поверхности 50 установлены два, обычно параллельных, рычага 60, 62, закрепленных с возможностью поворота с помощью коротких стержней 64. Рычаги 60, 62 проходят через значительную часть верхней поверхности 50 и выступают за край второго поворотного устройства 48. На внешних концах 66 обоих рычагов 60, 62 имеется выступающая вверх проушина 68, к которой присоединяется один конец пружины 70. Между рычагами 60, 62 расположен верхний конец центральной оси 44 и штырь 52.
Предпочтительно, чтобы рычаг 36 смещался относительно средства перевозки посредством второй пружины 72.
Как можно видеть из фиг.6, если средство перевозки 10 движется по кривой, то радиус кривизны для колес 12, 18 будет совершенно другим, чем для колес 14, 16. В данном случае предполагается, что радиус кривизны для колеса 12 составляет 1,53 метра - довольно обычный радиус для ситуации в супермаркете. Как можно видеть, этот радиус кривизны обычно проходит через ось 20 колеса 18. Однако радиус кривизны для колеса 14 составляет 2,12 метра для стандартной тележки в супермаркете. Это означает, что угол поворота, необходимый для колеса 14 будет отличаться от угла поворота, необходимого для колеса 12. При наличии заданных радиусов угол, необходимый для колеса 12, составит 16 градусов относительно продольной оси. Для колеса 14 он составляет 11 градусов. Аналогичный угол в 11 градусов необходим для колеса 16, и снова угол 16 градусов необходим для колеса 18.
Поэтому, когда средство перевозки 10 поворачивается в положение, показанное на фиг.6, колесо 12 будет поворачиваться налево, как и колесо 14. Колеса 16, 18 поворачивают направо. Таким образом, ремень перемещается в направлении, показанном стрелками.
На фиг.4, куда перенесены и стрелки, когда ремень 30 перемещается в указанном направлении, то первое поворотное устройство 46 будет приводиться в движение ремнем 30 по часовой стрелке. Вследствие этого штырь 52 будет взаимодействовать с рычагом 60 таким образом, что штырь 52 будет скользить в прорези 54 к концу 56. Рычаг 60 будет поворачиваться вокруг штыря 64 и займет положение, показанное на фиг.6. Рычаг 62, движущийся аналогичным образом вокруг своей оси 64, будет испытывать сопротивление благодаря воздействию на верхний конец центральной оси 44. Поэтому рычаг 62 не последует за рычагом 60. Однако благодаря тому, что рычаг 60 прикреплен ко второму поворотному устройству 48, он вызовет некоторый поворот второго поворотного устройства 48. Поэтому ремень 30 с правой стороны компенсирующего устройства 28 переместится, но в меньшей степени. Это объясняется тем, что эта часть ремня проходит вокруг второго компенсирующего устройства 48. Как таковой, угол поворота колес 14, 16 будет меньше угла поворота колес 12, 18, тем самым обеспечивается необходимая компенсация.
Степень различия в этом перемещении будет изменяться в соответствии с длинами рычагов 60, 62 и, в частности, соответствующих расстояний между штырем 64 и центральной осью 44 и между центральной осью 44 и верхним концом 66 рычагов 60, 62. Важно также сопротивление растяжению пружины 70.
Как показано на фиг.7 для крутого левого поворота, степень перемещения означает, что сопротивление пружины 70 в значительной степени преодолевается, и поэтому второе поворотное устройство 48 повернется вокруг центральной оси 44 почти настолько же, как и первое поворотное устройство 46. Таким образом, различие в угле между колесами 14, 16 против колес 12, 18 будет меньше в процентном отношении от полного углового перемещения. Разница в 5 градусов при 16 градусах гораздо больше в процентном отношении, чем разница в 6 градусов при 45 градусах.
На фиг. 8 показан сбой, который может случиться, если одно из колес (в данном случае колесо 12) испытывает внезапное резкое перемещение, такое как при попадании в выемку, трещину и т.п.. В этом случае сопротивление пружины 70 в значительной степени преодолевается, так что колеса 14, 16 остаются по существу в положении "езды вперед", хотя колеса 12, 18 могут двигаться к соответствующему положению. Ясно, что после преодоления выемки, трещины и т. п. колеса 12, 18 возвратятся в положение "езды вперед".
Действие пружины 70 будет стремиться привести оба поворотных устройства 46, 48 в положение, показанное на фиг.1-3, - в положение "езды вперед". Поэтому после завершения поворота пользователю нет необходимости возвращать средство перевозки 10 в положение "езды вперед", оно будет принимать это положение автоматически.
Пружина 72 поддерживает натяжение ремня 30 во всех случаях и может также выступать в качестве амортизатора при внезапном воздействии на одно или большее количество колес.
На фиг.9-12 показан второй вариант. В этом втором варианте похожие компоненты имеют те же индексы, но с добавлением префикса 2.
Имеется средство перевозки 210 с четырьмя колесами 212, 214, 216 и 218. Каждое колесо установлено на этом средстве перевозки посредством вертлюга или оси 220. Колеса 212, 218 расположены в виде пары переднее колесо - заднее колесо, и колеса 214, 216 также расположены в виде пары переднее колесо - заднее колесо. Компенсирующее устройство 228 находится между колесами 212, 214.
У каждого колеса 212, 214, 216, 218 есть диск большего диаметра 274 и диск меньшего диаметра 276. Можно видеть, что у левой пары колес 212, 218 диски большего диаметра 274 находятся над дисками меньшего диаметра 276, и они контактируют друг с другом. Таким образом, если колесо 212 поворачивает направо, то колесо 218 поворачивает налево. Аналогичная ситуация происходит и с колесами 214, 216, за исключением того, что их диск меньшего диаметра 276 находится над диском большего диаметра 274, но диски большего диаметра 274 все же контактируют друг с другом, так что происходит такое обратное угловое перемещение.
При таком расположении вместо ремня 30, контактирующегося с первым и вторым поворотными устройствами 46, 48, с поворотными устройствами 246 и 248 контактируют диски большего диаметра 274. Во всем остальном компенсирующее устройство 228 работает так же, как компенсирующее устройство 28.
Если обратиться к фиг.11 и 12, то можно видеть, что при левом и правом повороте колеса 212, 218 поворачиваются на одинаковый угол, а колеса 214, 216 поворачиваются на свой угол, который может отличаться от угла для колес 212, 218, но компенсирующее устройство 228 будет обеспечивать необходимое изменение угла.
Данное изобретение, естественно, не ограничивается устройствами привода, показанными в двух вариантах, и может использоваться любая форма устройства привода, включая цепь или другой подходящий элемент. Кроме того, колес может быть меньше четырех, данное изобретение применимо как для системы управления с тремя колесами, так и для системы управления с количеством колес, большим 4.
Хотя в вышеприведенном описании рассмотрены предпочтительные варианты усовершенствованной системы управления для ручного средства перевозки, специалистам в данной области понятно, что в рамках настоящего изобретения может быть выполнено множество вариантов и модификаций, касающихся деталей общего устройства или конструкции.
Понятно также, что изобретение, раскрытое в данном описании, распространяется на все альтернативные комбинации двух или более отличительных особенностей, указанных или очевидных из текста или рисунков. Все эти различные комбинации составляют различные альтернативные аспекты этого изобретения.
Также понятно, что термин "состоит" (или его грамматические варианты), использованный в этом описании, эквивалентен термину "содержит" и не должен пониматься как исключающий присутствие других элементов или особенностей.
Реферат
Изобретение относится к системам управления, а именно к компенсирующим устройствам для компенсации различных углов поворота колес в средствах перевозки со множеством колес, из которых, по крайней мере, два соединяются посредством системы привода так, чтобы поворачиваться одновременно. Устройство приспособлено для использования с системой привода. Компенсирующее устройство содержит первое поворотное устройство для вращения вокруг центральной оси 44, второе поворотное устройство для вращения вокруг центральной оси 44 и соединительное устройство 52, 54, соединяющее первое поворотное устройство и второе поворотное устройство для ограничения относительного углового перемещения между ними. При этом первое и второе поворотные устройства соосны. Технический результат заключается в улучшении управляемости за счет компенсации ограниченного нежелательного обратного перемещения колес и обеспечения различных радиусов поворота колес. 9 з.п. ф-лы, 12 ил.
Комментарии