Устройство идентификации местоположения для системы управления персональной скоростной перевозки - RU2137643C1
Код документа: RU2137643C1
Чертежи

Описание
Настоящее изобретение касается устройства идентификации местоположения для персональной скоростной перевозки (ПСП), которая представляет собой систему пассажирской перевозки, в которой маленькие средства передвижения автоматически приводятся в движение по сети наземных направляющих для обеспечения безостановочного транспортного обслуживания от начального пункта до конечного пункта для отдельных лиц или маленьких групп, чтобы получить достаточную пропускную способность по линиям, средства передвижения должны приводиться в движение с короткими интервалами времени, равными 0,5 секунды или больше.
Более конкретно, система управления для работы с такими короткими интервалами времени требует постоянного высокоточного определения местоположения и скорости каждого средства передвижения в системе, чтобы каждое средство передвижения могло сохранять определенный интервал по отношению к другим средствам передвижения и избегало столкновений во время соединения и других маневров.
Предшествующий уровень
техники
В системах перевозки по стационарным направляющим используются различные типы устройств идентификации местоположения. Однако эти системы перевозки работают с существенными интервалами
между средствами передвижения или поездами, а от системы идентификации местоположения не требуется чрезвычайной точности.
В обычных системах перевозки со стационарными направляющими типа железнодорожных путей, подземной железной дороги, системы монорельсового городского транспорта и некоторых автоматизированных систем перевозок по направляющим используется система рельсовой цепи для обнаружения местоположения поездов или средств передвижения. Рельсовый путь делится на участки, называемые блок-участками, которые изолированы друг от друга. Длина каждого блок-участка изменяется в соответствии с расчетной эксплуатационной скоростью и длиной типичных поездов. Типичные длины блок-участков составляют примерно 2000 м. Системы подземной железной дороги стремятся делать более медленными и они имеют более короткие длины блок-участков от 300 м до 1000 м. Как только поезд или средство передвижения поступает на участок рельсового пути, это можно обнаружить оборудованием управления перегоном, и затем наличие поезда передается на центральную управляющую вычислительную машину для преобразования в сигнал управления поездом. В этом типе систем поезда приводятся в движение с интервалами 60-300 секунд, поэтому относительная неточность системы обнаружения местоположения (± один отрезок блок-участка) не слишком важна.
Высокоскоростные поезда и подземные железные дороги с короткими интервалами времени требуют более высокой точности, поэтому в этих системах используются подвижные системы блок-постов, которые также позволяют использовать непрерывные стальные рельсы. Рельсовую цепь можно располагать в виде индуктивного кольца, и электровоз или другие вагоны можно монтировать с устройством индукции, которое приводит в действие рельсовую цепь. Этот подход исключает неточность, вызываемую длиной поезда, которая часто составляет более 400 м.
В другом средствеа определения местоположения используется глобальная система определения местоположения (ГСОМ), которая использует передачи спутника на геостационарной орбите для определения местоположения средства передвижения в пределах 25 м или около этого. Точность этой системы представляет основное преимущество по сравнению с традиционной рельсовой цепью или системами подвижных блок-постов, но ее нельзя использовать в туннелях подземной железной дороги, внутри некоторых экранированных строений и в некоторых географических местоположениях.
Ни одна из этих систем не подходит для системы персональной скоростной перевозки СКАЙКАР, поскольку степень точности недостаточна для величин, изменяющихся от 2 до 4, то есть в 100-10000 раз больше, чем точность, требуемая для ПСП. В соответствии с той же логикой, ни в одной из существующих транспортных систем не использовано штриховое кодирование для образования системы управления поездом или средством передвижения, т.к. они не требуют высокой степени точности определения местоположения.
При идентификации средств передвижения или транспортируемых материалов по станционарной направляющей широко используются также штриховые коды и лазерные сканирующие устройства. Например, штриховые коды используются при определении местоположения железнодорожных грузовых вагонов. Этот штриховой код прикрепляют к вагону, а считывающее устройство на полосе отчуждения передает идентификацию вагона в центр управления. Штриховые коды используют также в багажных системах аэропортов для направления багажных тележек в автоматизированных багажных системах. Штриховые коды используют только на упаковках, транспортируемых ленточными транспортерами с неподвижно расположенными устройствами считывания штрихового кода рядом с лентой. Считывающие устройства штрихового кода устанавливают также рядом с промышленными сборочными линиями для контроля и управления прохождения деталей, снабженных штриховым кодом.
Нам неизвестна промышленная или транспортная система, в которой используется устройство сканирования штрихового кода, смонтированное на подвижном средстве передвижения, и расположение штрихового кода на последовательной полосе в направляющей. Настоящее изобретение касается именно этого вопроса.
Описание сущности изобретения
Типичная система ПСП перемещается со скоростью от 45 км в час (12,5 м/с) до 60
км в час (16,67 м/с). Точность определения местоположения, требуемая для управления средством передвижения, составляет порядка 100 мм, поэтому определение местоположения каждого средства перемещения
следует фиксировать каждые 6-8 миллисекунд, что эквивалентно 100 мм расстояния следования.
Каждое средство передвижения должно фиксировать свое местоположение каждые 6-8 миллисекунд и передавать информацию идентификации и местоположения на управляющее устройство участка направляющей и последующим средствам передвижения в направляющей и средствам передвижения, поступающим на линии перехода. Каждое средство передвижения должно иметь возможность принимать данные идентификации, местоположения и скорости средства передвижения, следующего впереди, и тот же тип данных от средств передвижения, поступающих на линии перехода.
В основу настоящего изобретения поставлена задача создания системы определения местоположения средств передвижения, которая обеспечивает необходимую степень точности и которая не требует квалифицированного обслуживания, но экономична и надежна в эксплуатации, в которой использован новый способ применения лазерной техники считывания штрихового кода для систем управления перевозкой.
Полоску со штриховым кодом прикрепляют к каждой боковой стороне внутренней части направляющей 10 персональной скоростной перевозки (ПСП) СКАЙКАР. На полоске нанесены цифры со специальной последовательностью с интервалами 100 мм. Каждое средство передвижения 80, состоящее из шасси 40 и корпуса 30, снабжено двумя лазерными сканирующими устройствами 60a и 60b штрихового кода, которые расположены на каждой боковой стороне шасси 40 средства передвижения для считывания последовательности штриховых кодов. Номера полос штрихового кода 50a и 50b на каждой боковой стороне направляющей идентичны в каждом местоположении. Это позволяет системе работать с избыточностью. Будет контролироваться повреждение сканирующего устройства 60a и 60b штрихового кода, так что в том случае, если сканирующее устройство выйдет из строя, средство передвижения 80 будет запрограммировано на возвращение в депо технического обслуживания. Вероятность выхода из строя второго сканирующего устройства 60 в течение короткого интервала времени, которое требуется для возвращения, в действительности очень мала, поскольку вероятность составляет СВБР • СВБР, где СВБР - среднее время безотказной работы может составлять 10000 часов. Это дает СВБР идентификации местоположения средства передвижения, равное 100 000 000 часов, что эквивалентно 27 000 годам работы, а контроль отказа расширяет эту характеристику.
Каждое считывание штрихового кода преобразуется в цифровой формат и передается на встроенные вычислительные системы 72 средства передвижения, где можно измерить интервал между настоящим считыванием местоположения и предыдущим считыванием местоположения. Простой расчет дает скорость средства передвижения. Если скорость средства передвижения 80 увеличивается или уменьшается, простой расчет также дает степень ускорения или замедления. Если последовательные считывания дают одну и ту же запись местоположения, то средство передвижения 80 неподвижно.
Идентичность, местоположение, скорость и состояние ускорения-замедления средства передвижения можно передавать в каналы связи 21a и 21b направляющей в пределах микросекунды, в течение которой средство передвижения 80 должно пройти только 0,0125 мм. Эти данные передаются каналами связи 21a и 21b направляющей на управляющее устройство участка направляющей (не показано) и на другие соседние средства передвижения (не показаны).
Преимущества этой системы состоят в том, что она экономична при изготовлении и в работе, надежна и обеспечивает считывание единственного местоположения без вероятности ошибок или неоднозначностей. Средство передвижения 80 ПСП состоит из шасси 40, которое движется внутри направляющей 10, и корпуса для размещения пассажиров 30, который смонтирован на шасси 40 с внешней стороны направляющей 10. Шасси 40 состоят из рамы, на которой смонтированы поддерживающие колеса 42 и направляющие колеса 41, линейные двигатели сообщения движения 44a и 44b, механизмы выключения 46, тормоза (не показаны), система управления 70 средством передвижения, оборудование преобразования энергии (не показано) и другое вспомогательное оборудование (не показано).
Сканирующие устройства 60a и 60b штрихового кода закрепляют на боковых сторонах шасси 40, напротив каналов управления и связи 21a и 21b, которые прикреплены к каждой боковой стороне направляющей 10 внутри нее.
Сканирующие устройства 60a и 60b смонтированы на каждой боковой стороне шасси 40 на одной боковой оси с боковыми направляющими колесами 41.
Эта особенность устраняет любое изменение при считывании расстояния, которое может произойти, когда средство передвижения 80 проходит по небольшому радиусу кривизны направляющей 10.
Штриховые коды выгравированы на пластмассовой полоске 50 шириной примерно 100 мм, с сигналами, следующими через каждые 100 мм. Полоски 50a и 50b с штриховым кодом прикрепляют цементом к каналам 21a и 21b управления и связи, которые расположены внутри направляющей 10 на каждой боковой стороне.
Каждое сканирующее устройство 60a и 60b штрихового кода монтируют на мягко пружинящей подвеске 63, 64 и 66, которую крепят к шасси 40. Это изолирует сканирующие устройства 60a и 60b штрихового кода от вибрации, которая могла бы повредить механизмы. Источники вибрации состоят из динамических вибраций направляющей 10 и вибрации подвески средства передвижения 80.
Встроенные управляющие вычислительные машины 72a и 72b средства передвижения прикрепляют к шасси 40 рядом с устройствами сканирования 60a и 60b штрихового кода. Управляющие вычислительные устройства 72 продублированы и контролируют неисправности. Они сконструированы для работы с избыточностью на случай выхода из строя одной вычислительной машины.
Блок связи направляющей (БСН) (не показан), состоящий из передающих устройств и приемных устройств для управления, передачи данных связи и местоположения средства передвижения, монтируют на каждой боковой стороне шасси 40, напротив каналов управления 21a и 21b.
В этой конструкции система определения местоположения штриховым кодом не подвергается радио, микроволновым, инфракрасным или электромагнитным передачам или излучениям от встроенного оборудования средства передвижения 80 или других источников, внешних по отношению к направляющей 10.
Внутренняя часть направляющей 10 ПСП СКАЙКАР защищена от погодных условий и мусора покрытием 13 и парой гибких уплотняющих полос 18, которые закрывают прорезь 14 в верхней части направляющей, через которую проходит ребро 45 поддержания корпуса средства передвижения. Это устройство сохраняет штриховые коды 50a и 50b чистыми и свободными от мусора, пыли, дождя и других веществ, которые в противном случае могли бы затемнить штриховой код 50a и 50b или повредить лазерное сканирующее устройство 60a и 60b штрихового кода.
Система ПСП СКАЙКАР оборудована средством передвижения контроля направляющей (не показано) и средством передвижения технического обслуживания направляющей (не показано). Средство передвижения контроля направляющей среди других функций считывает штриховые коды в отношении признаков загрязнения или повреждения на регулярной основе и по меньшей мере один раз в день. Это средство передвижения имеет рычаг очистителя (не показан), который имеет возможность вытирать штриховые коды 50a и 50b, очищать любую грязь, которая может накапливаться в небольших областях в течение суток. Средство передвижения технического обслуживания направляющей проходит всю сеть ПСП не в часы пик и когда система закрывается для технического обслуживания. Это средство передвижения будет оборудовано для чистки всей системы штрихового кода периодически.
Штриховые коды 50a и 50b будут заменяться каждые несколько лет, в зависимости от степени полученного ухудшения. Здесь не будет происходить износ поверхности штрихового кода за исключением его периодической чистки.
Пластмассовая полоска будет выгравирована таким образом, чтобы штриховой код 50a и 50b сохранялся в течение многих лет мягкой чистки. Ожидается, что вероятный срок службы штрихового кода составит по меньшей мере пять лет. Штриховые коды 50a и 50b можно удалять и заменять отрезками во время программы периодических технических обслуживаний.
Краткое описание чертежей
В дальнейшем изобретение
поясняется описанием конкретных вариантов его воплощения со ссылками на сопровождающие чертежи, на которых:
фиг. 1 изображает часть системы ПСП со средством передвижения, устройство
идентификации местоположения, закрепленное на средстве передвижения 80, и штриховые коды 50 на каналах 21 управления, согласно изобретению;
фиг. 2 изображает общий вид части "A" канала
управления с прикрепленным штриховым кодом, согласно изобретению;
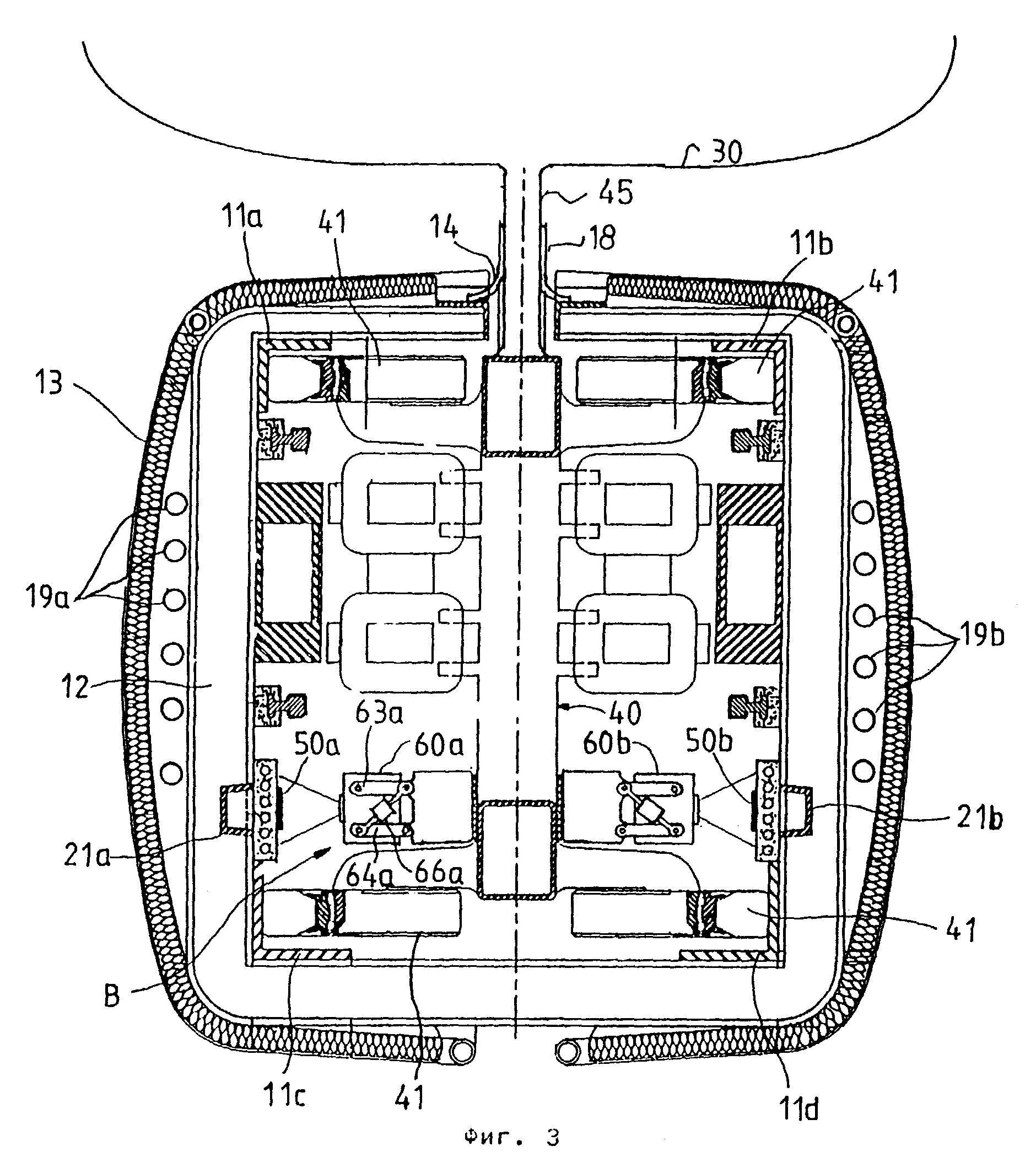
фиг. 3 изображает разрез направляющей и шасси средства передвижения по линии Ш-Ш на фиг. 1, согласно изобретению;
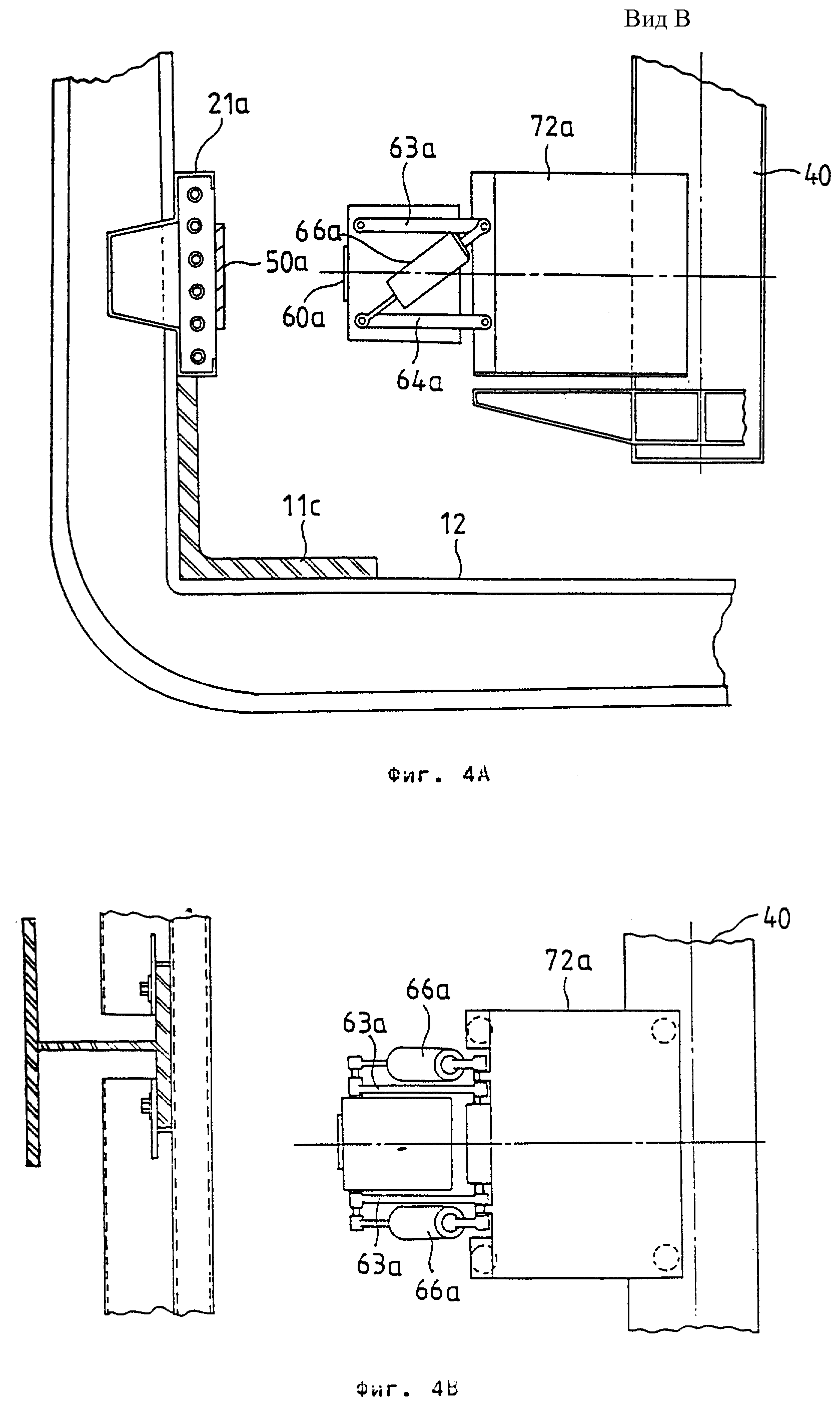
фиг. 4A изображает поперечный разрез вида по стрелке "B" на фиг. 3, сканирующее устройство штрихового кода; фиг. 4B изображает вид сверху сканирующего устройства штрихового кода, согласно изобретению;
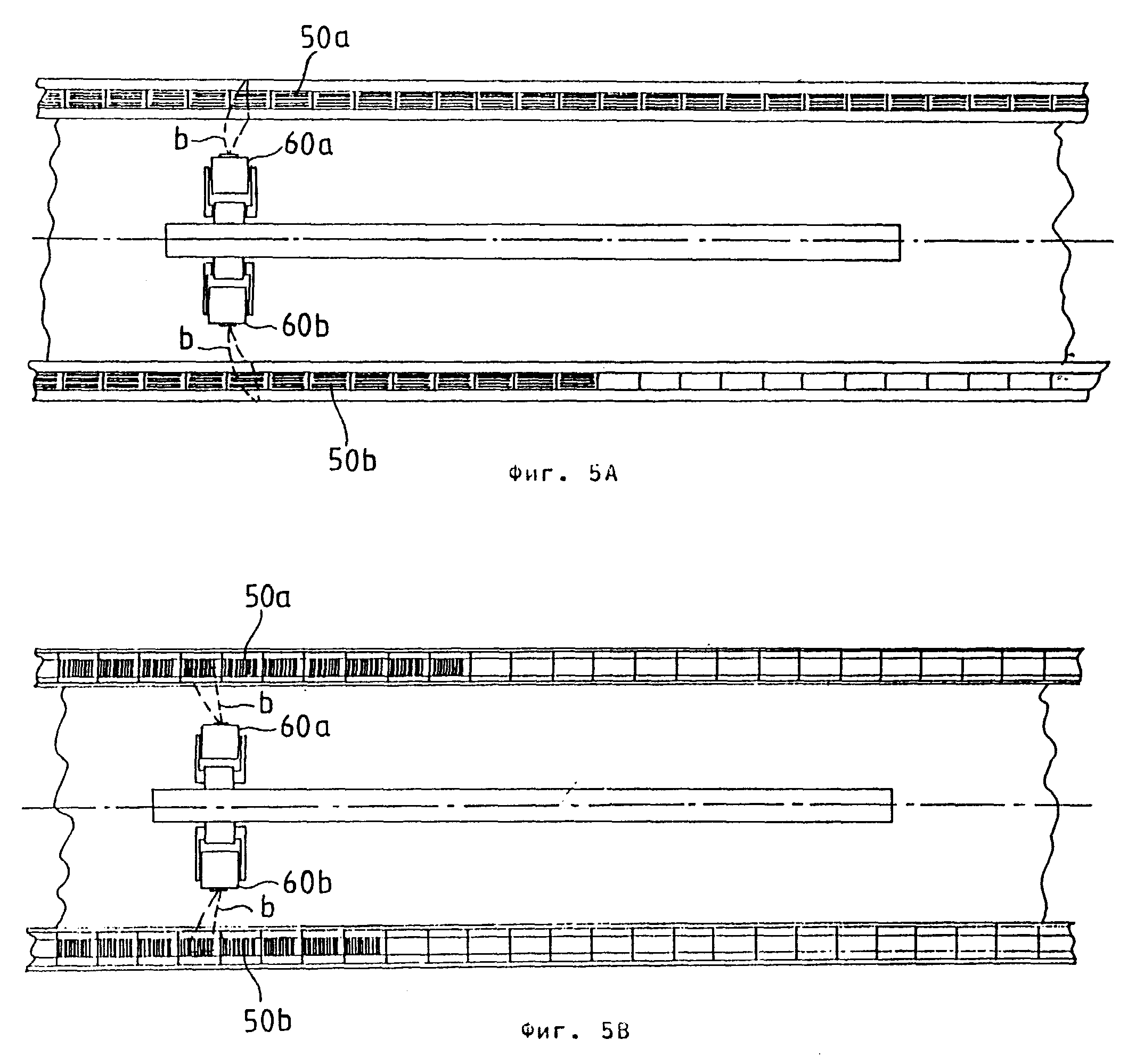
фиг. 5A и 5B изображают два альтернативных варианта нанесения штриховых кодов, подлежащих нанесению на каналы управления, вертикально или горизонтально, согласно изобретению;
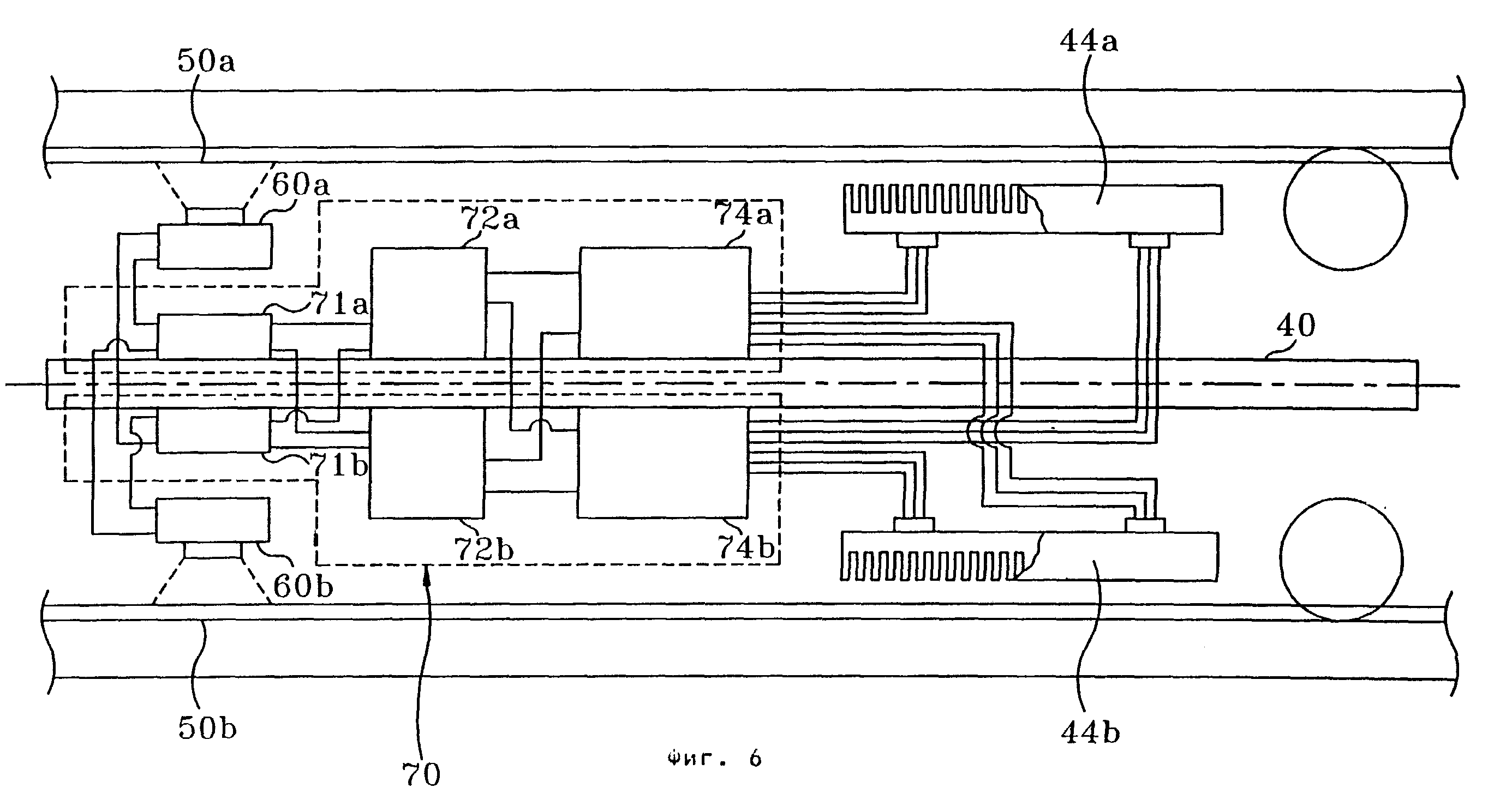
фиг. 6
изображает схему управляющего устройства для средства перемещения ПСП, согласно изобретению.
Описание лучшего варианта выполнения изобретения
Система персональной скоростной
перевозки (ПСП) будет кратко описана в предпочтительном варианте выполнения.
Система персональной скоростной перевозки (далее называемая ПСП) представляет собой систему перевозки пассажиров, в которой небольшие средства передвижения 80 (фиг. 1) приводятся в движение автоматически по сети большей частью надземных направляющих 10 для обеспечения обслуживания безостановочной перевозки от места отправления к месту назначения для лиц или групп, передвигающихся между автономными станциями. Чтобы получить достаточную пропускную способность по направляющей 10, средства передвижения 80 должны приводиться в движение с короткими интервалами времени (интервал времени определяется как временной интервал, завершающийся между последовательными средствами передвижения, проходящими данную точку), равными 0,5 секунды или больше. Этот тип работы требует высокоточного контроля местоположения средства передвижения 80 и скорости, чтобы выполнять различные операции, требуемые при слиянии двух линий движения автотранспорта, подходящих к независимым станциям и отходящих от них, и другие маневры.
Чтобы получить требуемую точность определения местоположения, используется устройство идентификации местоположения. Настоящий вариант этого устройства является уникальным для системы ПСП, сконструированной для целей, которые более подробно будут описаны ниже.
Система персональной скоростной перевозки будет кратко описана в предпочтительном варианте.
Система персональной скоростной перевозки содержит направляющую 10 средства передвижения, имеющую стальной кожух, установленный в воздухе в форме сети в районе деловой части города, и небольшое средство передвижения 80, которое может двигаться по направляющей 10 средства передвижения с высокой скоростью. Направляющая 10 содержит основной путь 10a и расходящиеся пути 10b и 10c, отходящие от основного пути 10a, в верхней средней части которых образована направляющая прорезь 14 для движения небольшого средства передвижения 80.
Главный корпус в раме кожуха направляющей 10 уплотняют покрытием 13, и покрытие 13 располагают на всей направляющей 10, исключая только направляющую прорезь 14, а к направляющей прорези 14 прикрепляют гибкую покрывающую полоску 18, чтобы предотвратить попадание через нее веществ извне. Покрытие 14 изолировано для устранения проникновения шума, электронных волн, микроволн и электромагнитных помех, когда небольшое средство передвижения 80 проходит по направляющей 10.
Направляющие рельсы 11a - 11d, которые расположены на четырех кромках поперечной рамы 12, имеющей почти квадратную □ форму, жестко закреплены вдоль направляющей 10 и выполняют роль направляющей рельсы маленького средства перемещения 80. Между покрытием 13 и поперечной рамой 12 направляющей 10 расположены кабели связи 19a и кабели источника электропитания 19b. На внутренней стороне поперечной рамы 12 в направляющей 10 вдоль нее расположены каналы связи 21a и 21b. Небольшое средство передвижения 80 быстро перемещается по прорези 14 направляющей 10 линейным двигателем 44a и направляющими колесами 41 и 42. Линейный двигатель 44a, управление которого осуществляется в управляющем устройстве 70, осуществляет перемещение шасси 40 назад или остановку. Ниже будет приведено подробное описание конструкции управляющего устройства 70.
Система персональной скоростной перевозки содержит устройство идентификации местоположения для управления местоположением и скоростью передвижения 80 по направляющей 10. Устройство идентификации местоположения средств передвижения 80 состоит из лентообразных элементов 50a и 50b штрихового кода, на которых напечатаны штриховые коды у и сканирующих устройств 60a и 60b. Элементы 50a и 50b штриховых кодов жестко прикреплены к поверхности каналов связи 21a и 21b, установленных в направляющей 10. Как показано на фиг. 5 элементы 50a и 50b штрихового кода можно прикреплять в горизонтальном направлении или в вертикальном направлении. Предпочитают, чтобы направления положений штрихов элементов 50a и 50b штрихового кода можно было видоизменять в соответствии с направлением лазерных лучей от сканирующих устройств 60a и 60b. Как показано на фиг. 5A, когда лазерные лучи b сканирующих устройств 60a и 60b проходят в вертикальном направлении, полоску элементов 50a и 50b штрихового кода прикрепляют в горизонтальном направлении, являющимся ортогональным лазерным лучом b. В противоположность этому, когда лазерные лучи b (фиг. 5B) сканирующих устройство 60a и 60b проходят в горизонтальное направление, полоску элементов 50a и 50b штрихового кода прикрепляют в вертикальном направлении, являющимся ортогональной лазерным лучам b. Элементы 50a и 50b штрихового кода имеют ширину порядка 10 см, на которых располагают и печатают цифры, показывающие интервал 10 см и участки направляющей 10. Сканирующие устройства 60a и 60b, расположенные напротив элементов 50a и 50b штрихового кода, считывают соответственные участки и цифровые местоположения, установленные на элементах 50a и 50b штрихового кода, и передают считанные данные на описываемое ниже устройство управления вычислительной машиной.
Сканирующие устройства 60a и 60b, расположенные напротив элементов 50a и 50b штрихового кода, прикреплены к обеим боковым сторонам шасси 40, соответственно. Предпочитают, чтобы сканирующие устройства 60a и 60b (фиг. 3) располагались на середине элементов 50a и 50b штрихового кода для обеспечения легкости идентификации местоположения от элементов 50a и 50b штрихового кода. Сканирующие устройства 60a и 60b жестко поддерживаются платами 72a и 72b центрального процессора в управляющем устройстве 70, установленном на шасси 40 средства передвижения 80.
На фиг. 4A изображен вид по стрелке "B" на фиг. 3. На фиг. 4B показан вид сверху на фиг. 4A. Сканирующее устройство 60a поддерживается парой опорных соединений 63a и 63b, расположенных на правой и левой сторонах, которые перемещаются вверх и вниз по панели 72a центрального процессора (ЦП), закрепленной на шасси 40. Сканирующее устройство 60a содержит также пружинные амортизаторы 66a на обеих боковых сторонах для поглощения толчков вибрации от вертикального направления средства передвижения 80. В частности, пружинные амортизаторы 66a, которые установлены в диагональном направлении, снижают вибрацию сканирующего устройства 60a от панели 72a ЦП. Благодаря этому сканирующее устройство 60a равномерно сохраняет высоту относительно штриховых кодов 50a, прикрепленных к внутренней стороне направляющей 10, при этом минимизируется неправильное функционирование сканирующего устройства 60a.
В этом варианте описана только подвешивающая конструкция, прикрепленная на одной боковой стороне сканирующего устройства 60a, поскольку подвешивающая конструкция других сканирующих устройств, прикрепленных на другой боковой стороне, аналогична.
На фиг. 6 схематически показано управляющее устройство средства передвижения для приведения в действие систем и идентифицирования местоположения, которое установлено в устройстве идентификации местоположения для персональной скоростной перевозки в соответствии с настоящим изобретением. Управляющее устройство 70 включает в себя сетевые панели 71a и 71b, которые электрически соединены со сканирующими устройствами 60a и 60b, соответственно, панели 72a и 72b ЦП, электрически соединены с сетевыми панелями 71a и 71b, и инверторы 74a и 74b, соединенные с панелями 72a и 72b ЦП, которые соединены с линейными двигателями 44a и 44b, обеспечивающими движущей силой средство передвижения.
Сетевые панели 71a и 71b выполняют роль информирования других средств передвижения о местоположении и скорости средства передвижения, полученных от сканирующих устройств 60a и 60b, а также получения данных о направлении и скорости средств передвижения, поступающих от центрального диспетчерского пункта на панели 72a и 72b ЦП, которые имеют проводные или радиосети.
Одно из сканирующих устройств 60a и 60b, расположенное у передней части шасси 40, и пример соединения с управляющим устройством 70 описаны ниже. Описание другого сканирующего устройства, расположенного у задней части шасси 40, будет опущено, поскольку оно аналогично первому.
Причина установки двух панелей ЦП и сканирующих устройств на обеих боковых сторонах шасси 40, соответственно, состоит в том, чтобы выполнять функцию идентификации местоположения и управления, когда одна из них имеет какие-либо повреждения.
Во-первых, шасси 40 (фиг. 1) средства передвижения 80 автоматически движется с высокой скоростью по направляющим рельсам 11a - 11d направляющей 10 на направляющих колесах 41 и 42 под действием силы, вырабатываемой линейными двигателями 44a и 44b. Во время движения средства 39 по направляющей сканирующего устройства 60a и 60b, расположенные на шасси 40 испускают лазерные лучи b, необходимые для считывания участков и направлений направляющей 10, расположенных на элементах 50a и 50b штрихового кода по направлению к элементам 50a и 50b штрихового кода, расположенных на противоположной стороне относительно сканирующих устройств 60a и 60b. Текущее местоположение, воспринимаемое лазерными лучами b от сканирующих устройств 60a и 60b или аналогичные данные, поступают от других средств передвижения на платы 72a и 72b ЦП, расположенные в вычислительной машине (не показана). Затем вычислительные машины обрабатывают собранные данные и управляет ускорением или замедлением силы тяги линейных двигателей 44a и 44b обработанными данными через инверторы 74a и 74b. Способ управления управляющим устройством 70 линейных двигателей 44a и 44b средства передвижения 80 данными, обнаруживаемыми сканирующими устройствами 60a и 60b, можно осуществлять в различных модификациях.
Ниже приводится подробное описание элементов настоящего изобретения.
Элементы направляющей ПСП
Направляющая ПСП содержит раму 10 стального кожуха, которая имеет
четыре продольных элемента направляющих и опор 11a, 11b, 11c и 11d. Эти продольные элементы 11 связаны диагональными элементами (не показаны) и усилены против скручивания поперечными рамами 12. Шасси
40 средства передвижения движутся внутри рамы 10 кожуха. Рама 10 кожуха имеет прорезь 14 на верхней части, через которую проходит узкое опорное ребро 45 для поддержания корпуса 30 средства
передвижения.
Связь для системы управления осуществляется в каналах 21a и 21b, расположенных на обеих боковых сторонах направляющей. Штриховые коды 50a и 50b для идентификации местоположения смонтированы на внутренних лицевых поверхностях каналов связи 21a и 21b. Штриховые коды 50a и 50b выгравированы на пластмассовой ленте со слегка переменными промежутками, чтобы из-за искривленных участков направляющей, сканирующие устройства 60a и 60b на каждой боковой стороне средства передвижения считывали одно и то же местоположение. Конструкция направляющей полностью заключена в поликарбонатовое покрытие 13, которое монтируют с использованием звукоизолирующего материала и экранируют от передачи микроволн и электромагнитного излучения от внешних и внутренних источников. На верхней части покрытий направляющей расположена гибкая уплотняющая полоска 18 с каждой боковой стороны прорези, чтобы не допустить попадания пыли, мусора, снега и дождя. Уплотняющая полоска 18 разделяется на части, когда ребро поддержания корпуса средства передвижения проходит по направляющей и закрывается позади него. Таким способом внутренняя часть направляющей 10 защищается от поступления грязи и пыли, которые могут влиять на сканирующие устройства 60a и 60b штрихового кода. Электрические силовые кабели 19a и волоконно-оптические кабели 19b связи расположены между покрытием 13 направляющей и поперечными рамами 12 направляющей. Волоконно-оптические кабели связи 19 в обеспечивают всю связь от контроллеров участка (не показаны) к центральному пункту управления (не показан). Волоконно-оптические кабели 19b не подвергаются воздействию электромагнитных помех или микроволновых передач.
Элементы шасси средства передвижения ПСП
Полоски 50 штрихового
кода, которые прикреплены к направляющей 10, должны иметь уникальную идентичность местоположения, которая программируется в логику системы управления 70 средством передвижения. Это позволяет любому
средству передвижения 80 идентифицировать свое местоположение в пределах микросекунд при любых рабочих условиях.
Поскольку средства передвижения 80 движутся со скоростями 12,5-16,67 м/с, сканирующие устройства 60 штрихового кода должны иметь очень высокую скорость сканирования и сопротивление, к вибрации, наводимой в направляющей 10 и в средствах передвижения 80.
Направление, сообщение движения и перевод средств передвижения ПСП
Средства передвижения ПСП продвигаются и тормозятся линейными двигателями 44a и 44b, смонтированными на каждой боковой
стороне шасси 40 средства передвижения. Средства передвижения направляются горизонтальными направляющими колесами 41, смонтированными у верхней и нижней частей шасси на каждой боковой стороне.
Средство передвижения поддерживается вертикальными ходовыми колесами 42 на каждом конце шасси. Средства передвижения переводятся с левого пути направляющей 10b или с правого пути направляющей 10c на
главный путь направляющей 10a посредством применения электромагнитных переключателей (не показаны), смонтированных на шасси 40. Приведение в действие левосторонних электромагнитов (не показаны)
обеспечивает движение средства передвижения по левосторонней стенке направляющей 10, а для перевода направо - наоборот.
Система управления средством
передвижения ПСП
Средство
передвижения 80 ПСП приводится в действие асинхронной управляющей системой, в которой каждое средство передвижения маневрирует независимо по направляющей для достижения станции назначения. Система
управления ПСП состоит из четырех основных компонентов;
1) Центральный пункт управления, отвечающий за общее управление быстродвижущимся средством передвижения и за контроль станций и линий
связи направляющей.
2) Контроллеры станций, отвечающие за движение пассажиров и средств передвижения в зоне станции.
3) Контроллеры зон направляющей, отвечающие за управление движением отдельных средств передвижения 80 на любом данном участке направляющей 10.
4) Устройство управления 70 средством передвижения на панели каждого средства передвижения 80, отвечающее за управление величиной и направлением тягового усилия линейного двигателя 44, также отвечающее за переключение, соответствующее командам, принимаемым от контроллеров зон направляющей.
Каждое средство передвижения определяет свое местоположение и скорость посредством устройства идентификации местоположения, в котором используются лазерные сканирующие устройства 60 для считывания местоположения на направляющей со штрихового кода 50. Эти данные передаются от средства передвижения 80 на местный контроллер зоны направляющей (не показан) через блок связи направляющей (не показан) и канал 21 связи направляющей. Контроллер зоны направляющей рассчитывает маневры, требуемые для того, чтобы средство передвижения следовало за предыдущим средством передвижения на безопасной дистанции или маневрировало таким образом, чтобы другие средства передвижения 80 могли безопасно перейти на линию. Команды передаются на средство передвижения 80 через блок связи направляющей, откуда они передаются в систему управления средством передвижения 70. Система управления 70 средством передвижения состоит из избыточных блоков обработки расчета (БОР) 72a и 72b, которые затем выдают необходимые команды на контроллеры 74a и 74b линейного двигателя средства передвижения, являющиеся дублированными инверторами регулируемого напряжения, регулируемой частоты (РНРЧ), или на электромагнитные переключатели (не показаны).
Конфигурация штрихового кода
Индивидуальные штриховые коды 50 можно располагать таким образом, чтобы считывать в двух
различных направлениях - в вертикальном и горизонтальном.
1. Вертикальные штриховые коды
Когда полоски штрихового кода расположены вертикально, механизм 60 сканирования
штрихового кода движется с той же скоростью, что и средство передвижения, и лазерное считывающее устройство должно сканировать штриховой код 50 в горизонтальном направлении в пределах имеющегося
времени считывания 6-8 миллисекунд, а скорость сканирования должна быть как можно ближе к скорости средства передвижения, то есть 12,5-16,67 м/с. Это является высокой скоростью сканирования по
промышленным стандартам.
Расположение полосок вертикального штрихового кода имеет то преимущество, что вертикальные вибрации средства передвижения не оказывают какого-то существенного влияния на точность устройства считывания 60 штрихового кода, поскольку основная амплитуда вибраций лежит в одном направлении с штрихами.
2. Горизонтальные штриховые коды
Когда полоски штрихового кода расположены горизонтально, механизм 60 сканирования штрихового кода движется с такой же скоростью, как и средство передвижения, но лазерное считывающее устройство
штрихового кода может сканировать штриховой код в вертикальном направлении с гораздо меньшей скоростью. Имеющееся время считывания должно все же составлять 6-8 миллисекунд, но расстояние считывания
через штриховой код должно быть только 20-30 мм, в зависимости от толщины линий штрихового кода.
Лазерное сканирующее устройство на самом деле следует по диагонали через штриховой код, поскольку путь следования соответствует результирующей скорости средства передвижения 80 и расстояния следования сканирующего устройства 60. Позволяя осуществлять допустимую вибрацию и отклонение подвесной системы, вертикальное расстояние следования лазерного сканирующего устройства не может превышать 30-40 мм.
Горизонтальное расположение полосок штрихового кода имеет такой недостаток, что вертикальные вибрации средства передвижения 80 делают более трудным считывание штрихового кода 50, если сканирующее устройство 60 штрихового кода не может в достаточной степени стабилизироваться. Проблему представляет вибрация, потому что основная амплитуда располагается поперек полосок штрихового кода. Предлагается монтировать сканирующее устройство 60 мягким упругим соединением с демпфированием для защиты механизма и ограничения частоты и амплитуды вибраций сканирующего устройства.
Местоположение штрихового кода
Штриховые коды должны
располагаться на направляющей 10 таким образом, чтобы их можно было считывать с любой стороны средства передвижения 80.
Это важно, поскольку средство передвижения, входящее на стрелку, отодвигается от штрихового кода на противоположной боковой стороне ответвления.
Полоска 50 штрихового кода должна защищаться от грязи и мусора, поэтому определение местоположения на уровне поверхности движения направляющей 10 оказывается невыполнимым.
Хорошо определять местоположение на боковых стенках. Для обнаружения штрихового кода имеются две альтернативных непрерывных вертикальных поверхности.
1) Рельс противодействия линейного двигателя на алюминиевой пластине противодействия, которая не соприкасается с главным двигателем или колесами поддержания зазора. Этот рельс подвергается непрерывной вибрации и неисправность колеса поддержания зазора может допускать скобление электромагнитными выключателями или якорем линейного двигателя поверхности рельса противодействия. Повреждение штрихового кода необходимо полностью избегать.
2) Канал системы управления и связи, который не имеет соприкосновения со средством передвижения вообще. Это является одной из предпочтительных поверхностей штрихового кода, поскольку она может быть изолирована от вибраций.
Описание сканирующего устройства штрихового
кода
Коммерческие сканирующие устройства штрихового кода с высокой скоростью развертывания растра являются подходящими для системы идентификации местоположения. Однако, они должны быть
приспособлены или видоизменены для удовлетворения рабочим условиям ПСП, которые включают в себя динамическое перемещение, вибрации, температурные экстремальные значения, воздействие электромагнитных
полей, воздействие радиопомех различных типов и требование в отношении высокой надежности, которую можно интерпретировать как высокое среднее время безотказной работы (СВБР). Обычно для такого
сканирующего устройства 60 требуется СВБР, равное 10 000 часов.
Расстояние сканирования штрихового кода
Расстояние сканирования штрихового кода между штриховыми кодами 50 на
канале 21 связи направляющей и лицевой поверхностью сканирующего устройства 60 не превышает 200 мм и должно быть не меньше 100 мм. Оптимальное расстояние будет определяться посредством подробного
исследования поля при реальных рабочих условиях. Оптимальное расстояние сканирования будет определяться шириной поля считывания, размером линий штрихового кода и вибрацией.
Считывающее устройство 60 штрихового кода для сканирования штрихового кода 50 требуется располагать рядом с шасси. Когда средство передвижения поступает на стрелку, расстояние между противоположной стенкой направляющей и шасси 40 увеличивается до 900 мм, прежде чем будет достигнута точка расхождения стрелки и вновь появятся две направляющих стенки. Диапазон штрихового кода на противоположной направляющей стенке увеличивается по мере движения средства передвижения 80 по стрелке.
Система автоматического фокусирования
Ситуация, возникающая, когда одно сканирующее
устройство 60a выходит из строя при обслуживании, не имеет серьезного значения на участках линии направляющей 10, поскольку сканирующее устройство 60b на противоположной стороне может считывать
штриховой код 60b. Однако, когда средство передвижения 80 входит на участок стрелки, расстояние от шасси 40 до противоположной стенки направляющей увеличивается примерно до 900 мм, прежде чем вновь
появится один участок направляющей 10. Необходимо, чтобы одно сканирующее устройство 60b могло продолжать считывать штриховой код 60в на противоположной стенке направляющей в случае выхода из строя
сканирующего устройства 60a на боковой стороне стрелочного перевода. Поэтому сканирующее устройство 60 должно снабжаться автоматической фокусировкой. Диапазон фокусирования должен составлять от 100 мм
до 1200 мм.
Автоматическое фокусирование должно иметь возможность последовательного считывания штриховых кодов, диапазон считывания которых изменяется в сторону увеличения или уменьшения на 15 мм в течение 6-8 миллисекунд.
Поле считывания штрихового кода
Поле считывания штрихового кода для большинства высокоскоростных коммерческих сканирующих
устройств связано с расстоянием сканирования и шириной линий штрихового кода. В случае узких штрихов типичные расстояния 100-200 мм требуют толщину штрихов 0,15-0,30 мм. Ширина поля обычно составляет
100-200 мм. Угол поля сканирования, как правило, составляет порядка 65 градусов.
Источник электрической энергии
На сканирующее устройство штрихового кода будет подаваться
напряжение 12 вольт постоянного тока непосредственно от аккумуляторных батарей средства передвижения. Эти аккумуляторные батареи держатся полностью заряженными. Источник электроэнергии будет
дублироваться.
Потребление электроэнергии
Обычное потребление электроэнергии составляет 4 Вт на каждое сканирующее устройство.
Источник света сканирующего
устройства штрихового кода
В качестве источника света будет использован обычный лазерный диод, работающий в видимой области спектра.
Максимальная разрешающая способность
Максимальная разрешающая способность сканирующего устройства составляет 0,15-0,30 мм, однако штриховой код ПСП оказывается по существу больше для минимизирования действий вибраций и грязи на
точность считывания. Максимальное количество подлежащих считыванию цифр, закодированных штриховым кодом, составляет шесть. Их можно делать достаточно толстыми для покрытия ширины фокусного
расстояния.
Угловая апертура сканирующего устройства штрихового кода
Обычно угловая апертура составляет 65 градусов.
Растровая развертка
В случае
конфигурации вертикального сканирования штрихового кода, путь сканирования будет представлять результирующую между скоростью средства передвижения в горизонтальном направлении и скоростью считывания
сканирующего устройства в вертикальном направлении. Поскольку максимальная скорость средства передвижения составляет 12,5-16,7 м/с, а типичная скорость сканирования составляет 5,0 м/с, тангенс
растровой развертки составляет 0,4-0,3. Однако, скорость средства передвижения оказывается переменной, поэтому тангенс растровой развертки должен быть переменным. Сканирующее устройство 60 должно
иметь возможность приспосабливаться к переменным тангенсам растровой развертки, при которых кажущаяся толщина линий изменяется. Растровая развертка является важным элементом устройства идентификации
местоположения.
Удобочитаемые коды
Большинство коммерческих сканирующих устройств 60 штрихового кода можно конструировать для чтения до 15 типов кодов. В системе обнаружения
местоположения СКАЙКАР требуется только один код. Большинство коммерческих сканирующих устройств могут иметь до 5 различных кодов, но в заявленном устройстве требуется только один код.
Размеры считывающего устройства штрихового кода
На рынке имеются различные сканирующие устройства. Типичные подходящие модели имеют размеры 101 мм • 84 мм • 66 мм.
Вес считывающего устройства штрихового кода
Типичный вес блока сканирующего устройства 60, исключая монтажную оснастку, составляет 0,70 кг.
Материал корпуса
Корпус сканирующего устройства 60 конструируют для всепогодной работы и защиты блоков от удара и проникновения посторонних предметов. Подходящие материалы корпуса включают литой алюминий,
композиционные материалы типа углеродистого волокна и прочных поликарбонатов. Корпус должен быть обеспечен экраном для устранения электромагнитных помех.
Рабочая температура
Сканирующее устройство 60 штрихового кода конструируют для удовлетворительной работы при температурах в диапазоне 0 - +45oC. В корпус будет включен обогреватель для работы в зимнее время
при температурах ниже 0 градусов. В корпусе будет установлен вентилятор для поддержания температуры ниже верхнего предела +45oC.
Температура хранения
Допустимые
пределы температуры хранения составляют +70 - -20 градусов по шкале Цельсия. Средства передвижения 80 обычно будут храниться под покрытием и удерживаться в этих пределах температур. Средства
передвижения, хранящиеся на направляющей вне депо хранения, можно охлаждать или нагревать, при необходимости, используя напряжение 12 вольт постоянного тока от аварийной аккумуляторной батареи.
Пределы влажности
Пределы влажности должны поддерживаться ниже 90% без конденсирования.
Устойчивость к вибрациям
Сканирующее устройство 60 штрихового кода
должно иметь возможность выдерживать, без повреждения или снижения технических характеристик, вибрации, эквивалентные FC 1,5 теста 68-2-6 Международной электротехнической комиссии (МЭК) на частотах
10-55 Гц, в течение двух часов по каждой оси. Поскольку это транзитное средство передвижения подвергается использованию в течение тысяч часов, для коммерческого использования будет определено
специально сконструированное виброустойчивое сканирующее устройство.
Сканирующее устройство 60 штрихового кода будет монтироваться на шасси 40 средства передвижения на мягких изоляционных пружинах 66, снабженных амортизаторами 66. Их будут конструировать для изолирования сканирующего устройства 60 от всех, кроме малых, вибраций.
Направляющая 10 будет подвергаться вибрациям, создаваемым последовательными подвижными нагрузками, ударными нагрузками средств передвижения 80, ветровыми нагрузками и, возможно, случайными столкновениями. Естественная частота вибраций средства передвижения составляет 5 Гц. Амплитуда отклонения направляющей составляет ±30 мм.
Средство передвижения 80 подвергается также вибрациям, создаваемым неровностями поверхности движения средства передвижения, резонансом с вибрациями средства передвижения, овальностью колес 41 и 42, силами реакции сообщения движения, ветровыми нагрузками и, возможно, но очень редко, соударениями между колесами.
Средство передвижения 80 имеет систему подвески, состоящую из полиуретановых колес 41 и 42, смонтированных на высокоэластичных подпружиненных монтажных рычагах.
Сопротивление удару
Должно удовлетворять требованиям EA 30G теста МЭК 68-2-27, 11 мс при трех ударах по каждой оси.
Класс
защиты
Класс защиты должен по меньшей мере удовлетворять требованию 1Р54.
Чувствительность к ЭМП
Лазерное считывающее устройство 60 штрихового кода должно работать в
непосредственной близости к источникам электромагнитных помех (ЭМП), включая линейные двигатели, электромагниты и другое оборудование постоянного и переменного тока.
На лазерное сканирующее устройство 60 и его управляющее устройство 70 не должны оказывать влияние источники или эти устройства следует полностью экранировать.
Чувствительность к ЭМС
Лазерное считывающее устройство 60 штрихового кода должно работать в непосредственной близости к электромагнитным силам (ЭМС) прерывистого и непрерывного характера. Эти силы будут создаваться
электромагнитами, линейными индукционными двигателями 44 и другими типами электрического оборудования, включая трансформаторы, инверторы РНРЧ 74 и электродвигатели вращательного движения.
На лазерное сканирующее устройство 60 и его управляющее устройство 70 это не должно оказывать влияния или эти устройства должны иметь возможность полностью экранироваться от их влияний.
Защита сканирующего устройства и штрихового кода от грязи и пыли
Сам штриховой код 50 необходимо все время поддерживать чистым, чтобы из бежать погрешностей считывания. Лазерное
сканирующее устройство также все время необходимо поддерживать чистым, чтобы избежать погрешностей сканирования.
То, что направляющую 10 закрывают, и что шасси 40 средства передвижения движутся внутри направляющей 10, является важным элементом настоящей конструкции. Без защиты от погодных условий и накопления грязи и мусора представление о местоположении штрихового кода не может быть реальным.
Требование в отношении покрытия направляющей и другие меры
Дополнительно к вышеупомянутой защите покрытием 13 направляющей, будут экранированы колеса
41 и 42 средства передвижения таким образом, чтобы они не отбрасывали брызги от поверхности движения направляющей 10. Возможны два источника брызг:
1) Дождевая вода, попадающая в направляющую
10, где уплотняющая полоска (18) не вполне непроницаема. Проникший снег является другим источником влаги.
2) Подбрасываемая колесами смазка направляющей. Считают, что смазка направляющей желательна по причине снижений изнашивания колес, сопротивления качению и так далее. Поэтому негустая консистентная смазка может быть лучше, чем жидкая смазка. Рассматривается также вариант разбрызгивания смазки.
3) Внутри направляющей может образовываться пыль от трения между шинопроводами и токосъемными башмаками. Эта пыль состоит из углеродо-графитового соединения, которое является высокоадгезивным под действием электрического заряда. С течением времени эта пыль может затемнять штриховые коды 50 или по меньшей мере вызвать местами неправильное их считывание сканирующим устройством 60.
Меры защиты от брызг и пыли
Колеса поддержания средства передвижения будут устанавливаться с крышками для сдерживания поднятых брызг
колесами, когда поверхность направляющей влажная. Покрытие направляющей держится вне большей части влаги в условиях открытой прорези, и фактически - всей влаги в условиях работы с уплотненной
прорезью.
Поперечные направляющие колеса также снабжены легкими покрытиями, где возможно создание брызг от влажной направляющей. Верхние направляющие колеса будут хорошо защищены от поступления воды посредством покрытия направляющей, и поэтому расположение штрихового кода находится в верхней части направляющей.
Поступающая в направляющую из атмосферы пыль представляет постоянную проблему, которую можно решить посредством использования уплотнений на прорези направляющей. Во время сухих летних периодов можно работать без покрытий.
Пыль, создаваемая контактом между шинопроводом и токосъемными башмаками, смонтированными на средстве передвижения, представляет серьезную проблему, которую минимизируют несколькими способами.
Шинопроводы изготовлены из алюминия с покрытием из нержавеющей стали. При использовании такого материала и частиц из нержавеющей стали износ не появляется или появляется незначительней, поэтому проблема устраняется посредством ежедневной чистки штрихового кода.
Токосъемные башмаки, изготавливаемые из традиционного углеродо-графитового состава, используемого в пантографах и токосъемных башмаках подземной железной дороги, не подходят для этой системы из-за высокого уровня пыли, создаваемой износом башмаков. Эта пыль черная и обычно электрически заряжена, что вызывает ее прилипание к любой соседней поверхности. При накапливании достаточного количества, она может также образовывать короткое замыкание.
Токосъемные башмаки выполняют из медного сплава, который объединяет высокую проводимость с хорошими свойствами разряда для минимизации износа с одновременным достижением надежного контакта с шинопроводом. Башмаки подвешивают на мягких пружинах, устанавливаемых с амортизаторами, для минимизации постоянного контакта с шинопроводом.
Техническое обслуживание системы определения местоположения штрихового кода
направляющей и средства передвижения
Важно осуществлять техническое обслуживание системы определения местоположения средства передвижения для надежного и точного управления средством
передвижения. Частью конструирования системы является следующая методика технического обслуживания.
Чистка направляющей
Блок автоматизированной чистки направляющей будет
приводиться в действие по всей направляющей по меньшей мере один раз каждый день.
Блок чистки можно приводить в действие во время эксплуатации, и он работает на одинаковой скорости с пассажирским средством передвижения 80. Блок обслуживания оптически сканирует штриховые коды 50 на каждой боковой стороне направляющей 10 и контролирует накопление пыли и брызг. Где необходимо, будет автоматически применяться разбрызгивание чистящего средства и специальное приспособление для чистки подверженной воздействию части.
Более тщательную чистку будут выполнять в конце каждого рабочего дня, при которой весь штриховой код 50 будет осторожно чиститься на низкой скорости. Для удаления пыли будет использоваться блок вакуумной чистки, снабженный щетками.
Сканирующее устройство 60 будут чистить и проверять ежедневно в депо стоянки и технического обслуживания. Каждое сканирующее устройство 60 будет испытываться диагностически и функционально. Чистка крышек объективов будет проводиться каждый раз, иногда средство передвижения входит в депо и выходит из него. СТОСП (система технического обслуживания средства передвижения) контролирует характеристики сканирующего устройства 60 на ежедневной основе для проверки ухудшения характеристик.
Требование в отношении избыточности
Принцип конструирования ПСП состоит в
том, чтобы сделать все основные системы управления и сообщения движения избыточными. Это означает, что выход из строя любого основного компонента не вызывает повреждения системы персональной
скоростной перевозки (ПСП). Устройство идентификации местоположения является основной частью и поэтому дублируется наличием сканирующих устройств 60 на каждой боковой стороне средства передвижения 80
и штрихового кода 50 на каждой боковой стороне направляющей 10. Среднее время безотказной работы системы с избыточностью представляет собой СВБР • СВБР, которое оказывается очень большим
числом. Средства передвижения 80 ПСП программируют для возвращения в депо технического обслуживания сразу же после выхода из строя любого одного из основных компонентов, так что вероятность выхода из
строя второго компонента в пределах времени, необходимого для достижения депо, на самом деле очень мала.
Требование в отношении контроля повреждений
Средства передвижения 80
будут оборудованы системой контроля повреждений, которая проверяет на надежность систему обнаружения местоположения средства передвижения.
Устройство контроля повреждений обнаруживает любое повреждение для считывания конкретного местоположения. Это может происходить по разным причинам.
1) Грязь на штриховом коде 50 в данном местоположении. /Это не обязательно является серьезным фактором, если только затемнены один-пять участков штрихового кода (100-500 мм), не влияющих на все средства перемещения/.
2) Грязь на крышке объектива сканирующего устройства 60 (серьезное и предполагаемое основное повреждение, требующее возвращения средства передвижения в депо).
3) Неисправность в блоке сканирующего устройства 60 или в электронном блоке обработки сканирующего устройства. (Серьезная и требующая запрограммированного возвращения средства передвижения в депо). Для определения местоположения, средство передвижения 80 должно полагаться на избыточное устройство сканирования на противоположной боковой стороне.
Средство управления средством передвижения
Настоящее изобретение касается
использования считывающих устройств 60 штрихового кода, установленных для перемещения средств передвижения 80 с короткими интервалами по направляющей 10, снабженной штриховым кодом 50 для определения
их местоположения с высокой степенью точности.
Считывания штрихового кода будут передаваться на блок обработки вычислительной машины 72, встроенный в средстве передвижения 80, где они будут использоваться для расчета местоположения средства передвижения по сети направляющих, его скорости и степени ускорения или замедления. Эти данные будут использоваться для управления скоростью средства передвижения 80 в соответствии с требованиями к управлению. Данные будут передаваться на контроллеры зон направляющей для каждого участка направляющей 10, и данные будут также передаваться на соседние средства передвижения 80, чтобы регулировать их скорость относительно друг друга.
Сама конструкция системы управления 70 не является предметом настоящего изобретения, однако требования системы управления 70 описаны для объяснения важности точного определения местоположения средства передвижения 80 для системы ПСП.
Промышленная применимость
Настоящий вариант осуществления отличается от существующего промышленного варианта сканирующих устройств штрихового кода на железных дорогах и других системах транспортирования, типа линейных
транспортеров, где штриховой код закрепляют на подвижном средстве передвижения или компоненте, а сканирующее устройство закрепляют неподвижно около рельсового пути или линейного транспортера. В таких
случаях сканирующие устройства штрихового кода используются для идентификации прохождения средств передвижения или компонентов мимо неподвижной точки, но не используются для расчета их местоположения
в любой точке в системе транспортирования или для расчета их скорости.
Настоящий вариант осуществления устройства идентификации местоположения позволяет точно определять местоположение любого средства передвижения ПСП с точностью в пределах 100 мм (±50 мм), и позволяет насчитывать скорость с точностью ± 1% в любом месте в большой сети направляющих. Место и скорость можно насчитывать каждые 6-8 миллисекунд, обеспечивая тем самым установление точного интервала между средствами передвижения и заранее предотвращая любое столкновение между средствами передвижения.
Реферат
Устройство предназначено для персональной скоростной перевозки. Оно включает направляющую средства передвижения, которая расположена над железнодорожными путями в центре города, и маленькие средства передвижения, которые перемещаются по направляющей. Интервалы составляют единицы секунды для скоростной перевозки малой группы пассажиров. Устройство содержит средство определения местоположения, состоящее из цифровых полосок с цифровым кодом. Полоски расположены в виде непрерывной ленты. Штриховые коды нанесены посредством гравирования. Элементы штрихового кода прикреплены к каналам управления на обеих боковым сторонах направляющей. Участки и соответствующие местоположения направляющей обозначаются в виде цифр или букв для определения местоположения при перемещении средства передвижения вдоль направляющей. Напротив средства определения местоположения средств передвижения установлено средство идентификации местоположения. Оно предназначено для считывания и идентификации текущего местоположения средств передвижения со штриховых кодов в средство определения местоположения и передачи сигналов идентифицирования местоположения средств передвижения в средство управления. Средство управления расположено рядом со средством идентификации местоположения. Технический результат - экономичность при изготовлении и в работе, надежность, обеспечение считывания местоположения без ошибок или неоднозначностей. 13 з.п.ф-лы, 6 ил.

Комментарии