Хвостовое устройство контроля целостности поезда - RU2764478C1
Код документа: RU2764478C1
Чертежи

Описание
Настоящее изобретение относится к измерительной и управляющей технике, используемой на железнодорожном транспорте, а именно к устройствам контроля целостности поезда.
Необходимость контроля целостности поезда обусловлена необходимостью обеспечения безопасности движения железнодорожного транспорта. В частности, контроль целостности поезда необходим при организации движения по технологии «подвижного» или «плавающего» межпоездного интервала (далее блок-участка). Длина такого блок-участка определяется в реальном времени в зависимости от местоположения (координат) начала (локомотива) и конца (хвостового вагона) попутно следующих поездов, их типа и характеристик.
Традиционными системами интервального регулирования движения поездов являются системы, в основе которых лежит принцип существования блок-участков фиксированной длины, не привязанных к координатам составов. Так, известны устройства проверки целостности подвижного состава, основанные на счете числа осей проходящих поездов [Устинский А.А., Степенский Б.М., Цыбуля Н.А. Автоматика, телемеханика и связь на железнодорожном транспорте. - М.: Транспорт, 1985 г., с. 17-23, 139-140.]. Устройства, реализующие способ счета осей подвижного состава, могут снабжаться первичным датчиком различного типа. На с. 18 описана конструкция педали рельсовой саморегулирующейся просадочной. На с. 20 представлена трансформаторно-компенсационная педаль типа ТКП (используется на сортировочных станциях). На с. 21 представлены магнитоэлектронный датчик типа МЭД и бесконтактная магнитная педаль типа ПБМ-56.
К недостаткам таких устройств относятся:
1) необходимость размещения напольной аппаратуры, протягивания линий связи и электропитания;
2) низкая помехозащищенность системы контроля от ложных срабатываний в результате воздействия на напольные контрольные датчики волочащихся за подвижным составом предметов, колебаний подвижного состава и т.д.;
3) формирование сигнала целостности состава возможно только в отдельных жестко заданных точках пути;
4) резкое увеличение количества напольной аппаратуры с увеличением числа точек проверки целостности подвижного состава;
5) информация от данного устройства бортовой аппаратурой не используется;
6) низкая информативность применяемых устройств;
7) напольная аппаратура может стать объектом вандализма.
Известно устройство контроля целостности подвижного состава, состоящее из пассивного датчика, закрепляемого на хвосте сформированного поезда, и напольного активного датчика, монтируемого в контрольной точке пути [Устинский А.А., Степенский Б.М., Цыбуля Н.А. Автоматика, телемеханика и связь на железнодорожном транспорте. - М.: Транспорт, 1985 г., с. 17-23, 139-140.]. В устройстве применяют активный датчик типа индуктор.
Основными недостатками устройств контроля целостности подвижного состава, состоящих из пассивного датчика, закрепляемого на хвосте сформированного поезда, и напольного активного датчика, монтируемого в контрольной точке пути, являются следующие:
1) индуктор, изготавливаемый из металла, имеет значительную массу, что затрудняет обслуживание поездов;
2) низкая помехозащищенность системы контроля от ложных срабатываний в результате воздействия на напольные контрольные датчики волочащихся за подвижным составом предметов;
3) отсутствие контроля полносоставности при движении поезда на участках маршрута, расположенных между точками контроля целостности подвижного состава, из-за отсутствия информации от индуктора в тех местах, где отсутствует напольная приемная аппаратура;
4) информация от данного датчика бортовой аппаратурой не используется, а используется только диспетчерским пунктом;
5) низкая информативность применяемых устройств.
Важно отметить, что любой подход, основанный на организации блок-участков фиксированной длины, имеет ограничения минимального интервала следования поездов по участку пути и не позволяет гибко оптимизировать пропускную способность участков при выполнении заданных требований по безопасности.
Решением указанной задачи является использование систем интервального регулирования по технологии «подвижных» или «плавающих» межпоездных интервалов. Данный подход подразумевает высокоточное определение координаты хвоста впередиидущего поезда и контроль его состояния. Применение данной технологии позволяет выявлять такие опасные ситуации как разрыв поезда (вагоны остаются на участке ЖД пути и становятся препятствием для движения попутно следующих поездов), сход тележки хвостового вагона с рельс (происходит разрушение строения пути, что, в свою очередь, также является препятствием для безопасного движения поездов).
Известно устройство контроля целостности подвижного состава, содержащее локомотивный пневмоэлектрический датчик, узел отображения состояния подвижного состава и исполнительный узел. Пневмоэлектрический датчик представляет собой корпус, разделенный на две полости при помощи мембранной перегородки, снабженный узлом контроля положения мембраны в виде микровыключателя и катушкой. Одна полость датчика сообщается с каналом дополнительной разрядки магистральной части воздухораспределителя, другая - с каналом тормозного цилиндра. Узел отображения состояния подвижного состава представляет собой сигнальную лампу, а исполнительный узел - контакты реле [З. Иноземцев В.Г. Тормоза железнодорожного подвижного состава. - М.: Транспорт, 1979 г., с. 242-243.].
Недостатками данного устройства контроля целостности подвижного состава являются:
1) низкая информационная емкость;
2) отсутствие дополнительных диагностических функций;
3) контроль целостности состава только с одного конца тормозной магистрали не обеспечивает безопасности движения, так как возможны ситуации, при которых обрыв тормозной магистрали при отцепе хвостового вагона не приводит к торможению состава автоматически.
Последнее характерно для длинных поездов, наиболее склонных к обрывам хвостовой части [3. Иноземцев В.Г. Тормоза железнодорожного подвижного состава. - М.: Транспорт, 1979 г., с. 242-243.]. С учетом изношенности парка вагонов возможны также ситуации, когда за одну поездку происходят два неблагоприятных события: закупорка или засорение тормозной магистрали и последующий обрыв вагона или группы вагонов, расположенных дальше места первой неисправности, по направлению от головы к хвосту поезда.
Из уровня техники известно устройство контроля целостности подвижного состава, содержащее локомотивный пневмоэлектрический датчик, узел отображения состояния подвижного состава и исполнительный узел [3. Иноземцев В.Г. Тормоза железнодорожного подвижного состава. - М.: Транспорт, 1979 г., с. 242-243.].
Также из уровня техники известно устройство контроля целостности подвижного состава, содержащее локомотивный пневмоэлектрический датчик, узел отображения состояния подвижного состава и исполнительный узел [патент РФ RU2240243]. Устройство содержит также хвостовой пневмоэлектрический датчик, соединенный с передатчиком, который связан посредством приемника сигналов хвостового пневмоэлектрического датчика с узлом обработки информации датчиков, к другому входу которого подключен выход локомотивного пневмоэлектрического датчика. Выход узла обработки информации датчиков связан со входом узла отображения состояния подвижного состава, входом узла внешней связи и исполнительным узлом. В результате повышается достоверность контроля целостности подвижного состава. Однако данное решение имеет некоторые недостатки:
1) Контроль целостности поезда осуществляется по единственному параметру - величине давления сжатого воздуха в тормозной магистрали поезда, измеренного в хвостовом вагоне и величине давления в локомотиве (голове поезда). Это может приводить к ложным срабатываниям устройства, или наоборот, к пропуску факта разрыва поезда при различных поездных ситуациях, например, в случае, когда производится штатное управление пневматическими тормозами поезда (когда давления в локомотиве и последнем вагоне поезда будут иметь разное значение);
2) Неспособность выполнять свои функции в коротких поездах, при маневровой работе, когда отсутствует подключение состава к тормозной магистрали локомотива;
3) Отсутствие возможности определения точной координаты хвоста оторванной части поезда, что может привести к потенциальной ситуации столкновения идущего следом поезда и оторванной частью состава.
Также из уровня техники известен блок хвостового вагона 034, ТУ 3184-134-05756760-2012, ОАО «МТЗТрансмаш» (далее БХВ) [http://catalog-mtz.ru/#/prodnct/blok-livostovogo-vagona]. БХВ предназначен для управления давлением в тормозной магистрали поезда по командам от локомотивной системы безопасности и управления, либо иной другой совместимой системы. Область применения БХВ: грузовой подвижной состав железных дорог.БХВ состоит из:
- платы индикатора, предназначенной для обеспечения работоспособности и вывода сообщения об информационном состоянии БХВ;
- АКБ, предназначенной для автономной работоспособности БХВ;
- части пневматической, предназначенной для обеспечения разрядки тормозной магистрали (ТМ) служебным или экстренным темпом;
- соединительной головки, предназначенной для подсоединения БХВ к тормозной магистрали вагона;
- антенны БХВ, предназначенной для приема и передачи информации.
БХВ устанавливается на конструктивные элементы автосцепки грузового вагона. Блок БХВ имеет дисплей, на который выводятся следующие данные:
- наличие связи по основному и резервному каналам;
- процент оставшейся емкости и напряжение аккумулятора;
- давление в тормозной магистрали;
- номер канала, на котором работает БХВ
Помимо недостатков, сходных с недостатками решения, изложенного в [патент РФ RU2240243], следует учесть, что данное решение предназначено исключительно для управления давлением в тормозной магистрали поезда с хвоста состава и напрямую не осуществляет контроль целостности поезда.
Ближайшим аналогом заявленного изобретения является хвостовой полукомплект подсистемы TIMS, Bombardier Transportation [http://daikenautomacao.com.br/home/automacao_uft_en.php]. Данное устройство предназначено для обеспечения безопасности движения поездов в поездной и маневровой работе на участках железных дорог с автономной и электрической тягой постоянного и переменного тока, оборудованных устройствами интервального регулирования движения поездов на базе цифрового радиоканала.
TIMS работает с бортовой локомотивной системой управления и безопасности и обеспечивает функцию по определению положения хвостового вагона и подтверждения целостности поезда. TIMS устанавливается на последний вагон и имеет крепление на рычаге автосцепки и обеспечивает информационный обмен с бортовой локомотивной системой управления и безопасности.
Однако данное устройство имеет ряд существенных недостатков при использовании в целях определения целостности подвижного состава (поезда), а также в целях определения межпоездного интервала в технологии подвижных («плавающих») блок участков. К таким недостаткам относятся следующие:
1) хвостовой блок TIMS, информационно связан только с локомотивной системой управления, причем, для связи с локомотивной системой управления использует единственный канал радиосвязи - радиоканал дальнего поля действия, связь по которому нередко имеет длительные сбои под действием помех, нарушение связи со стационарными ретрансляторами из-за рельефа местности, отсутствия зоны устойчивой радиосвязи или движения поезда в тоннелях;
2) Для определения своего точного местоположения хвостовой блок TIMS использует координаты, полученные от спутниковой навигационной системы (СНС) с корректировкой этой координаты по данным с акселерометра. Однако устойчивый прием информации от спутниковой навигационной системы затруднителен при движении поезда в тоннелях, на сложном рельефе местности;
3) хвостовой блок TIMS не позволяет осуществлять автономную самостоятельную оценку полученных и измеренных параметров на предмет детектирования опасных поездных ситуаций (таких, например, как разрыв поезда), а лишь отправляет полученные от собственных датчиков данные в локомотивную систему управления, где и осуществляется оценка этих параметров;
4) хвостовой блок TIMS не обладает собственными устройствами предотвращения обнаруженных опасных поездных ситуаций;
5) в хвостовом блоке TIMS отсутствует функционал приема управляющих команд и приема актуальных данных о параметрах поезда, текущего режима движения поезда;
6) в хвостовом блоке TIMS отсутствует механизм передачи собранных им данных и оценок этих данных на удаленные диспетчерские центры;
7) в хвостовом блоке TIMS отсутствует механизм регистрации и хранения собранных данных, а также результатов их анализа.
Таким образом, техническим результатом заявленного изобретения является повышение безопасности движения поезда и поездопотока, а также повышение пропускной способности железнодорожных линий.
Технический результат обеспечивает устройство контроля целостности подвижного состава, включающее в себя приемник-передатчик радиосигналов дальнего поля действия, приемник-передатчик радиосигналов ближнего поля действия, приемник сигналов спутниковых навигационных систем, микропроцессорный модуль приема и обработки информации, датчик температуры, датчик давления, акселерометр, гироскоп, магнетометр, клапан сброса давления, часы реального времени, контроллер питания, преобразователи напряжений, батарею питания, генератор переменного тока, информационно управляющую шину, шину питания. При этом датчик температуры соединен с микропроцессорным модулем приема и обработки информации, датчик давления соединен с микропроцессорным модулем приема и обработки информации, акселерометр соединен с микропроцессорным модулем приема и обработки информации, гироскоп соединен с микропроцессорным модулем приема и обработки информации, магнетометр соединен с микропроцессорным модулем приема и обработки информации, клапан сброса давления, соединен с микропроцессорным модулем приема и обработки информации, часы реального времени соединены с микропроцессорным модулем приема и обработки информации, приемник-передатчик радиосигналов дальнего поля действия соединен с приемником-передатчиком радиосигналов ближнего поля действия посредством информационно управляющей шины, приемник-передатчик радиосигналов дальнего поля действия соединен с приемником сигналов спутниковых навигационных систем посредством информационно управляющей шины, приемник-передатчик радиосигналов дальнего поля действия соединен с микропроцессорным модулем приема и обработки информации посредством информационно управляющей шины, приемник-передатчик радиосигналов дальнего поля действия соединен с контроллером питания посредством информационно управляющей шины, приемник-передатчик радиосигналов ближнего поля действия соединен с приемником сигналов спутниковых навигационных систем посредством информационно управляющей шины, приемник-передатчик радиосигналов ближнего поля действия соединен с микропроцессорным модулем приема и обработки информации посредством информационно управляющей шины, приемник-передатчик радиосигналов дальнего поля действия соединен с контроллером питания посредством информационно управляющей шины, приемник сигналов спутниковых навигационных систем соединен с микропроцессорным модулем приема и обработки информации посредством информационно управляющей шины, приемник сигналов спутниковых навигационных систем соединен с контроллером питания посредством информационно управляющей шины, микропроцессорный модуль приема и обработки информации соединен с контроллером питания посредством информационно управляющей шины, приемник-передатчик радиосигналов дальнего поля действия соединен с микропроцессорным модулем приема и обработки информации посредством шины питания, приемник-передатчик радиосигналов дальнего поля действия соединен с преобразователями напряжений посредством шины питания, приемник-передатчик радиосигналов ближнего поля действия соединен с микропроцессорным модулем приема и обработки информации посредством шины питания, приемник-передатчик радиосигналов ближнего поля действия соединен с преобразователями напряжений посредством шины питания, приемник сигналов спутниковых навигационных систем соединен с микропроцессорным модулем приема и обработки информации посредством шины питания, приемник сигналов спутниковых навигационных систем соединен с преобразователями напряжений посредством шины питания, микропроцессорный модуль приема и обработки информации соединен с преобразователями напряжений посредством шины питания, контроллер питания соединен с батареей питания, батарея питания соединена с преобразователями напряжений, генератор переменного тока соединен с контроллером питания.
Как вариант, заявленное изобретение может дополнительно включать терминал чтения смарт-ключа. При этом терминал чтения смарт-ключа соединяется с радиомодемом ближнего поля действия посредством информационно управляющей шины, терминал чтения смарт-ключа соединяется с радиомодемом дальнего поля действия посредством информационно управляющей шины, терминал чтения смарт-ключа соединяется с приемником сигналов спутниковых навигационных систем посредством информационно управляющей шины, терминал чтения смарт-ключа соединяется с микропроцессорным модулем приема и обработки информации посредством информационно управляющей шины, терминал чтения смарт-ключа соединяется с контроллером питания посредством информационно управляющей шины, терминал чтения смарт-ключа соединяется с микропроцессорным модулем приема и обработки информации посредством шины питания, терминал чтения смарт-ключа соединяется с преобразователями напряжений посредством шины питания.
В качестве акселерометра в составе заявленного изобретения может быть использован трехосевой акселерометр, например, инерциальный измерительный элемент ADIS16488A по технологии iMEMS или любой другой акселерометр со схожими характеристиками.
В качестве генератора переменного тока в составе заявленного изобретения может быть использован пневмогенератор.
В качестве гироскопа в составе заявленного изобретения может быть использован трехстепенной гироскоп, например, инерциальный измерительный элемент ADIS16488A по технологии iMEMS или любой другой акселерометр со схожими характеристиками.
В качестве датчика температуры в составе заявленного изобретения может быть, например, использован цифровой датчик температуры и влажности МТН02 или любой другой датчик температуры со схожими характеристиками.
В качестве часов реального времени в составе заявленного изобретения может быть, например, использована микросхема M41T64Q6F или любые другие часы реального времени со схожими характеристиками.
В качестве магнитометра в составе заявленного изобретения может быть, например, использован инерциальный измерительный элемент ADIS16488A по технологии iMEMS или любой другой магнитометр со схожими характеристиками.
В качестве датчика давления в составе заявленного изобретения может быть, например, использован датчик давления Trafag 8293.78.23.17 или любой другой датчик давления со схожими характеристиками.
В качестве клапана сброса давления в составе заявленного изобретения может быть, например, использован электропневматический клапан Camozzi CFB15P-R1 или любой другой клапан сброса давления со схожими характеристиками.
В качестве приемопередатчика ближнего поля действия в составе заявленного изобретения может быть, например, использован приемопередатчик типа LPWAN, WPAN или любой другой приемопередатчик ближнего поля действия со схожими характеристиками.
В качестве приемопередатчика дальнего поля действия в составе заявленного изобретения может быть, например, использован приемопередатчик TETRA, GSM, GSM-R или любой другой приемопередатчик со схожими характеристиками.
В качестве преобразователя напряжения в составе заявленного изобретения может быть, например, использован преобразователь напряжения DC/DC 24-3.3 (5) или любой другой преобразователь напряжения со схожими характеристиками.
В качестве контроллера питания в составе заявленного изобретения может быть, например, использована микросхема L6924 или любой другой контроллер питания со схожими характеристиками.
Информационно управляющая шина представляет собой цифровой проводной интерфейс приема-передачи информации с возможностью подключения множества устройств - приемников-передатчиков информации. Информация, поступающая на информационно управляющую шину, становится доступной для всех устройств, подключенных к информационно управляющей шине. Таким образом информационно управляющая шина обеспечивает высокую степень синхронизации обмена информацией между устройствами в составе заявленного изобретения. Как вариант, в качестве информационно-управляющей шины в составе заявленного изобретения может быть использована шина последовательного интерфейса Ethernet, CAN, RS485, MVB или любая другая со схожими характеристиками.
Заявленное изобретение устанавливается на автосцепку хвостового вагона поезда, соединяется с тормозной магистралью штатным рукавом и обеспечивает:
1) Выявление нарушения целостности поезда и занятости блок участка за счет:
- оценки длины поезда по положению хвостового вагона относительно локомотива;
- определения текущего точного местоположения поезда на участке движения;
- оценки изменения скорости и координаты хвоста поезда по отношению к такому же изменению в голове поезда;
- контроля давления в тормозной магистрали хвостового вагона;
- контроля векторов ускорений и динамики изменений напряженности магнитных полей, полученных от инерциальной измерительной подсистемы;
- контроля текущих географических координат и скорости движения с использованием спутниковой навигационной системы;
- информационного обмена с использованием беспроводного соединения повышенной надежности за счет реализации возможности прямого обмена с устройством, расположенным в локомотиве (транковая связь по технологии DMO или информационный обмен по протоколам LPWAN, или технологии УКВ-радиосвязи), а также за счет информационного обмена с соединением, использующим базовые станции (транковая связь, технологии семейства GSM) с возможностью приема передачи информации и управляющих команд с централизованной системой обеспечения безопасности движения или диспетчерским центром;
2) Выявление превышения вибрационных и ударных нагрузок различной природы возникновения, с привязкой к временной и географической метке появления подобного превышения, за счет специализированных многоосевых датчиков измерения вибрации и ускорений, с последующей передачей этой информации по радиоканалу в локомотивную систему управления и удаленные централизованные системы обеспечения безопасности движения или диспетчерские центры.
3) Самостоятельную оценку интенсивности и периодичности возникновения вибрационных и ударных нагрузок, превышающих допустимые уровни для выявления опасных ситуаций схода вагона с рельс, критического состояния пути и других потенциально опасных ситуаций.
4) Самостоятельное или по команде, полученной по радиоканалу, управление торможением подвижного состава за счет наличия пневматического клапана для выпуска воздуха из тормозной магистрали.
Полностью автономная работа заявленного изобретения обеспечивается собственным источником питания (аккумуляторная батарея и электрогенератор, например, на основе альтернативных источников энергии).
Выявление собственных отказов и сбоев в работе заявленного изобретения осуществляется за счет алгоритмов внутреннего тестирования.
Съемное конструктивное исполнение позволяет осуществлять установку заявленного изобретения на вагон непосредственно перед поездкой (при формировании состава).
Идентификация и привязка заявленного изобретения к локомотивному оборудованию, его привязка к текущему номеру поезда и регистрация устройства на новом составе может осуществляться, например, при помощи смарт-ключа.
От ближайшего аналога заявленное изобретение отличается следующим образом:
- помимо доступа к радиоканалу дальнего поля действия заявленное изобретение имеет доступ к радиоканалу ближнего поля действия. Это позволяет напрямую осуществлять связь с локомотивной системой управления минуя стационарные ретрансляторы;
- помимо приемника сигналов спутниковой навигационной системы и акселерометра заявленное изобретение имеет в своем составе магнитометр, который позволяет корректировать текущую координату с частичной потерей информации от спутниковых навигационных систем (СНС);
- заявленное изобретение имеет в своем составе микропроцессорный блок, который осуществляет обработку поступающей от датчиков информации, а также обработку информации от удаленных диспетчерских центров. На основании этих оценок производится детектирование опасных поездных ситуаций;
- заявленное изобретение имеет встроенную (независимую от локомотивной) систему управления тормозной системой поезда. Это необходимо в целях предотвращения зафиксированных опасных поездных ситуаций путем применения служебного пневматического торможения (ступенчатого и/или экстренного);
- в целях более точного детектирования и оценки опасных поездных ситуаций заявленное изобретение осуществляет прием информации от удаленных диспетчерских центров и/или локомотивной системы управления, осуществляет прием и отработку управляющих команд на активацию пневматического торможения поезда от удаленных диспетчерских центров и/или локомотивной системы управления;
- заявленное изобретение позволяет передавать синхронизированные измеренные величины, оценки этих величин на удаленные диспетчерские центры в реальном времени;
- в заявленном изобретении микропроцессорный модуль содержит энергонезависимую память, для хранения всей собранной информации и ее последующей оценки.
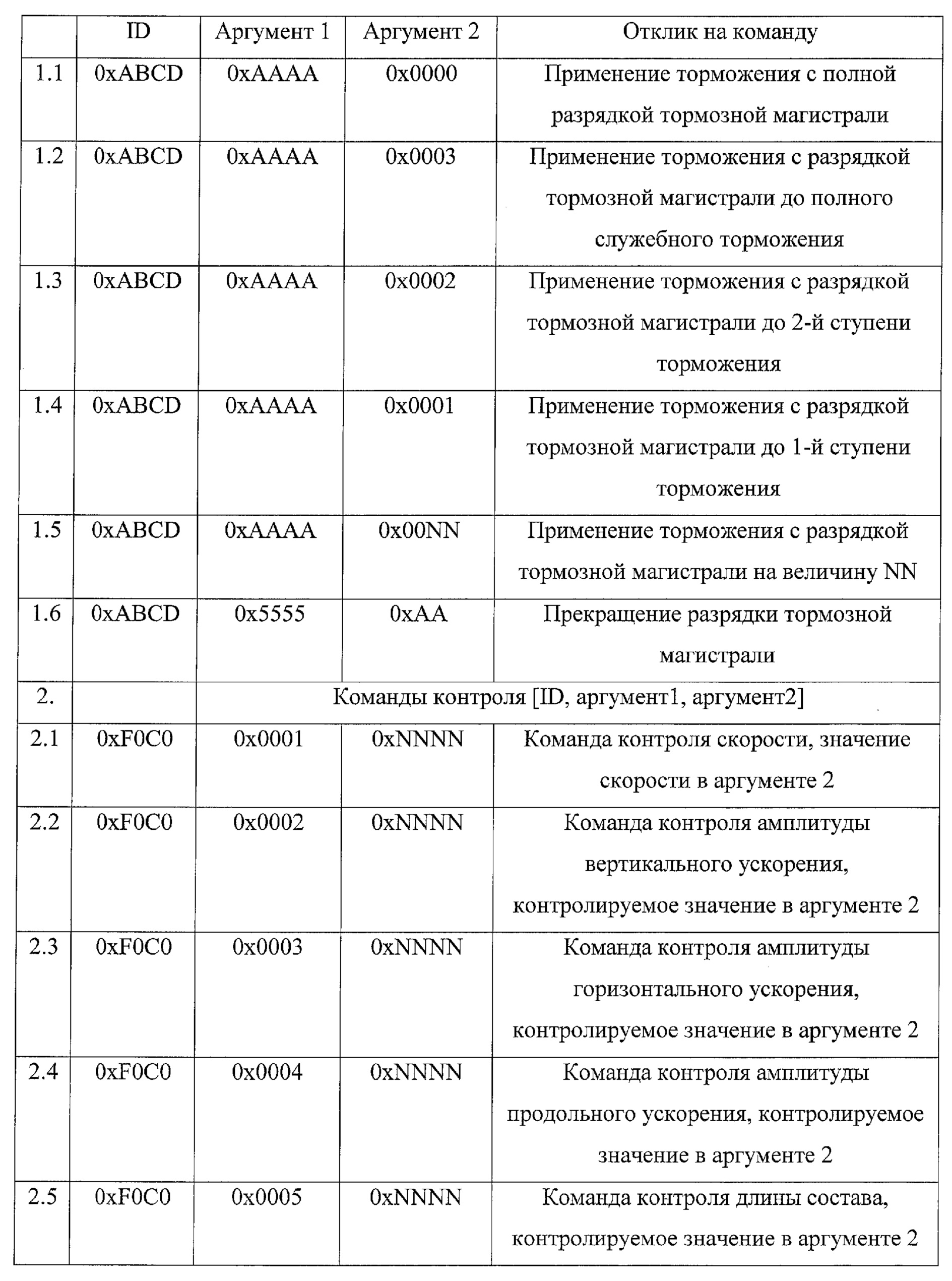
Заявленное изобретение функционирует следующим образом. В основном режиме работы (режим измерений и оценки) по собственным цифровым, дискретным или аналоговым цепям посредством заявленного изобретения обеспечивается непрерывный процесс получения информации от измерительных датчиков (датчика температуры, гироскопа, магнитометра, давления, акселерометра и часов реального времени), входящих в состав устройства. При этом электрическое питание датчиков осуществляется непосредственно от схемы электрического питания, в которую входят генератор, батарея питания, контроллер питания и преобразователь напряжения. Параллельно с получением информации от измерительных датчиков между микропроцессорным модулем посредством приемника сигналов СНС устанавливается и поддерживается канал связи для получения текущих географических координат и текущей скорости движения. По этим данным, а также с учетом информации от датчиков акселерометра и магнитометра, в микропроцессорном модуле происходит расчет уточненных текущих координат и текущей скорости движения поезда. Параллельно с этим через информационно-управляющую шину микропроцессорный модуль осуществляет трансляцию измеренных и сформированных величин в удаленные диспетчерские центры и локомотивную систему управления посредством радиоприемников/передатчиков ближнего и дальнего поля действия. По этим же каналам радиосвязи микропроцессорный блок получает от локомотивной системы управления и удаленных диспетчерских центров служебную информацию (координаты локомотива, скорость движения, давление в тормозной магистрали и др., параметры движения поезда, контролируемые пороги формируемых показателей), а также управляющие торможением команды. По всей совокупности получаемой информации, микропроцессорный блок формирует критические показатели параметров движения и функционирования поезда, осуществляет оценку этих параметров с учетом известных их пороговых значений, производит их комплексирование для формирования интегрального показателя, определяющего вероятность наступления одной из опасных для эксплуатации поезда ситуаций (ситуации указаны в таблице 1). Все результаты оценок и измерений, а также признаки детектирования опасных ситуаций микропроцессорный модуль передает посредством радиоприемников/передатчиков ближнего и дальнего поля действия в удаленные диспетчерские центры и локомотивную систему управления в целях дальнейшего принятия решения об изменении режима движения поезда. При этом микропроцессорный модуль по ряду признаков выполняет сценарий с применением пневматического торможения посредством клапана сброса давления из тормозной магистрали поезда. Также микропроцессорный модуль, независимо от результатов оценки интегральных показателей посредством управления клапаном сброса давления из тормозной магистрали выполняет команды на торможение, поступающие по радиоканалу ближнего или дальнего радиуса действия от диспетчерских центров или локомотивной системы управления. Список внешних команд, используемых для управления заявленным изобретением, приведен в таблице 2.


Работа заявленного изобретения в режиме настройки и конфигурирования включает:
- привязку идентификатора устройства к грузовому поезду, на котором оно установлено;
-загрузку в микропроцессорный модуль параметров поезда (длина, максимально допустимая скорость для данного поезда, вес поезда и др.), а также пороговых значений измеряемых и рассчитываемых устройством параметров;
Хранение конфигурационной информации осуществляется в памяти микропроцессорного модуля.
Перечень используемых устройств для детектирования и предотвращения опасных с точки зрения обеспечения безопасного движения ситуаций приведен в таблице 1.

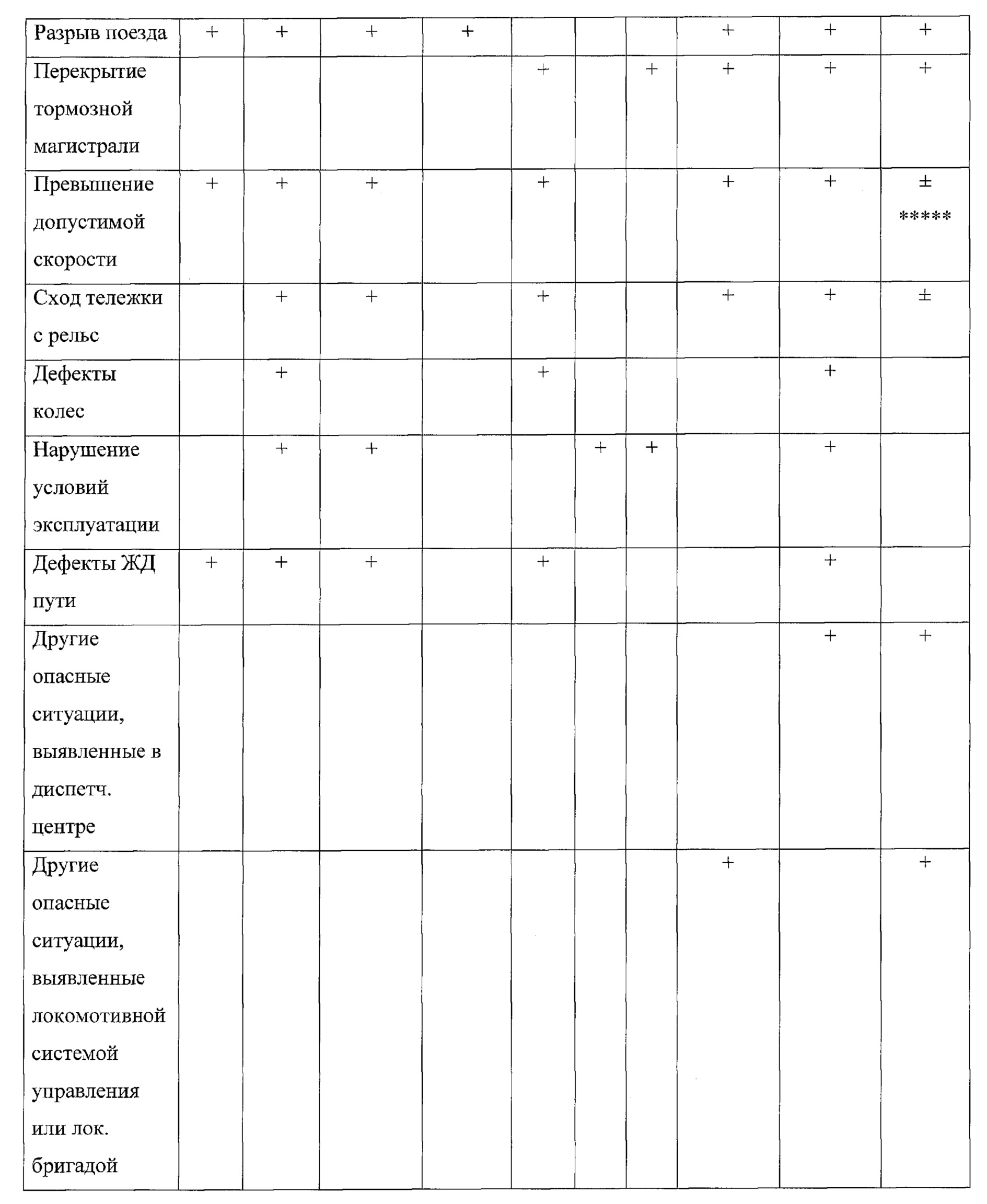
* - спутниковая навигационная система; ** - приемник-передатчик радиосигналов ближнего поля действия; *** - приемник-передатчик радиосигналов дальнего поля действия; **** - клапан сброса давления в тормозной магистрали; ***** - может быть задействован в некоторых режимах работы изобретения.
На фиг. 1 представлена структурная схема заявленного изобретения. Схема включает приемник-передатчик радиосигналов дальнего поля действия (1), приемник-передатчик радиосигналов ближнего поля действия (2), приемник сигналов спутниковых навигационных систем (3), терминал чтения смарт-ключа (4) микропроцессорный модуль приема и обработки информации (5), преобразователь напряжений (6), батарея питания (7), контроллер питания (8), генератор переменного тока (9), датчик температуры (10), акселерометр (11), гироскоп (12), магнетометр (14), часы реального времени (15), клапан сброса давления (16), шину питания (17), информационно управляющую шину (18), тормозную магистраль (19). Также на фиг. 1 изображен вариант расположения некоторых элементов устройства на платах (сенсорная палата (20) и плата (21)).
Заявленное решение иллюстрируется нижеследующими примерами реализации.
Пример 1. Работа устройства при обнаружении опасного события (разрыв поезда).
Причина события
При движении поезда по участку движения произошло самопроизвольное разъединение сцепного устройства между вагонами в поезде.
Работа изобретения
Заявленное изобретение непрерывно в режиме реального времени получает от собственных устройств приема информации спутниковой навигационной системы текущую географическую координату, микропроцессорный модуль производит ее корректировку по данным от датчиков (магнитометр и 3-х осевой акселерометр) и, в итоге, формирует точную географическую координату своего текущего расположения (хвоста поезда). Затем устройство передает эту координату по каналам радиосвязи в локомотивную систему управления и удаленный диспетчерский центр по контролю занятости блок участков. При этом, по каналам радиосвязи ближнего действия (напрямую с локомотива), по радиоканалу дальнего поля действия (из диспетчерского пункта) поступает информация о текущей координате локомотива (головы поезда) и длине поезда (статическая длина поезда), полученной при формировании состава.
По радиоканалу заявленное изобретение получает команду на осуществление контроля текущей длины состава. Команда выглядит следующим образом:
0xF0C0 0x0005 0x0320,
где первые два байта - идентификатор типа команды (команда контроля), вторые два байта - идентификатор контролируемого параметра (контроль длины состава), третий байт - значение контролируемого параметра (максимальная длина состава в метрах).
Полученные таким образом координаты головы и хвоста поезда являются основой для вычисления микропроцессорным модулем текущей длины поезда с учетом радиусов возможных кривых ЖД пути. Полученная длина поезда сравнивается со статической длиной поезда, и, при этом, в случае увеличения текущей расчетной длины поезда относительно статической длины более чем на ΔL [задаваемый параметр - допуск длины всего поезда) устройство интерпретирует это событие как разрыв поезда. По каналам радиосвязи дальнего и ближнего поля действия устройство передает уведомление об опасной ситуации, а также передает в локомотив команду на применение торможения и производит торможение поезда собственными техническими средствами (клапан сброса давления и датчик давления). При этом информация от заявленного изобретения, переданная по каналу дальнего поля действия, позволяет диспетчерскому пункту отследить текущее местоположение оторванной хвостовой части поезда для корректировки режима движения следующего позади поезда для недопущения столкновения с оторвавшимися вагонами. Коррекция режима движения поезда от диспетчерского центра осуществляется путем передачи соответствующей команды по радиоканалу дальнего поля действия. По радиоканалу заявленное изобретение получает команду на применение пневматического торможения. Команда выглядит следующим образом:
0xABCD 0хАААА 0x0000, где первые два байта - идентификатор типа команды (команда управления торможением), вторые два байта - идентификатор действия (применение торможения), третий байт - ступень торможения (экстренное торможение). Таким образом, при разрыве поезда устройство обеспечивает детектирование этого события в реальном времени (время детектирования этого события можно регулировать величиной ΔL), производит самостоятельное торможение хвостовой части поезда и отправляет команду на торможение в локомотивные системы управления, тем самым обеспечивая возможность автоматического торможения всего поезда. При этом в целях предотвращения возможного столкновения позади идущего поезда и оставшихся на путях оторванных вагонов устройство предоставляет информацию в диспетчерские службы. Использование заявленного изобретения позволяет повысить безопасность движения поезда и поездопотока, а также повысить пропускную способность железнодорожных линий.
Пример 2. Событие - перекрытие тормозной магистрали (ТМ) в поезде.
Причина события
Перемерзание тормозной магистрали, перекрытие концевых кранов ТМ вагона или локомотива.
Работа изобретения
Заявленное изобретение непрерывно в режиме реального времени получает от собственных устройств (датчика давления) измеренное значение давления в тормозной магистрали вагона по месту его установки. Одновременно с этим по каналам радиосвязи ближнего действия (напрямую с локомотива), по радиоканалу дальнего поля действия (из диспетчерского пункта) поступает информация о текущем давлении в тормозной магистрали (ТМ) локомотива. В случае применения пневматического торможения поезда с локомотива происходит снижение давления в ТМ. Информация об этом поступает в микропроцессорный модуль.
По радиоканалу заявленное изобретение получает команду на осуществление контроля текущего давления в тормозной магистрали. Команда выглядит следующим образом:
0xF0C0 0хАААА 0x0320, где первые два байта - идентификатор тип команды (команда контроля), вторые два байта - идентификатор контролируемого параметра (контроль давления), третий байт - значение контролируемого параметра (значение давления в МПа* 100).
Производится сравнение текущего значения давления в ТМ по месту его установки со значением давления в ТМ, полученным от локомотива. Затем производится оценка времени прохождения воздушной волны по ТМ от локомотива до хвостового вагона. В случае, если в течение времени Δt в тормозной магистрали вагона по месту установки не произойдет соответствующее снижение давления, то изобретение зафиксирует опасное событие - перекрытие тормозной магистрали. При этом изобретение автоматически производит торможение поезда собственными техническими средствами (клапан сброса давления и датчик давления). По каналам радиосвязи дальнего и ближнего поля действия изобретение передает сигнал об опасной ситуации, а также команды для локомотивной системы управления о применении торможения и запретом включения тяги. Также устройство может получить команду на торможение из диспетчерского центра по радиоканалу. Команда выглядит следующим образом:
0xABCD 0хАААА 0x0001,
где первые два байта - идентификатор тип команды (команда управления торможением), вторые два байта - идентификатор действия (применение торможения), третий байт - ступень торможения (первая ступень торможения).
Таким образом, при перекрытии тормозной магистрали в поезде заявленное изобретение обеспечивает детектирование этого события в реальном времени и производит торможение поезда с хвоста состава, как по команде из диспетчерского центра, так и по собственным критериям, тем самым предотвращая опасную ситуацию, при которой происходит нарушение работы тормозной системы поезда. Также заявленное изобретение не позволяет начать или продолжить движение поезда без устранения выявленной опасной ситуации. Использование заявленного изобретения позволяет повысить безопасность движения поезда и поездопотока, а, также повысить пропускную способность железнодорожных линий.
Пример 3. Событие - прекращение или нарушение безопасного управления поезда машинистом или локомотивной системой безопасности и управления.
Причина события
Нарушение в работе локомотивных систем управления или нарушения в работе локомотивной бригады.
Работа изобретения
Заявленное изобретение непрерывно в режиме реального времени получает от собственных устройств приема информации спутниковой навигационной системы текущую фактическую скорость движения поезда, микропроцессорный модуль производит ее корректировку по данным от акселерометра, и, в конечном итоге, формирует значение точной текущей скорости движения поезда, которое передается по каналу радиосвязи дальнего поля действия в диспетчерский центр, при этом, по каналам радиосвязи изобретение может получать значение текущей допустимой скорости движения поезда.
По радиоканалу заявленное изобретение получает команду на осуществление контроля текущей скорости движения. Команда выглядит следующим образом:
0xF0C0 0x0001 0x0050,
где первые два байта идентификатор - тип команды (команда контроля), вторые два байта - идентификатор контролируемого параметра (контроль максимальной скорости движения), третий байт - значение контролируемого параметра (значение скорости в км/ч).
В случае явного превышения фактической скорости движения поезда, рассчитанной изобретением и переданной в диспетчерский центр, изобретение по команде из диспетчерского центра или по собственно сформированному критерию, производит пневматическое торможение поезда.
Таким образом, в случае нарушения в работе локомотивных систем управления или нарушения в работе локомотивной бригады заявленное изобретение обеспечивает детектирование этого события в реальном времени и производит торможение поезда с хвоста состава, по команде из диспетчерского центра или по собственным критериям, тем самым предотвращая чрезвычайно опасную ситуацию превышения допустимой скорости движения поезда. Использование заявленного изобретения позволяет повысить безопасность движения поезда и поездопотока, а, также повысить пропускную способность железнодорожных линий.
Пример 4. Событие - сход тележки вагона с рельс
Причина события:
Неудовлетворительное техническое состояние тележки вагона, нарушение режимов движения или условий эксплуатации.
Работа изобретения
Заявленное изобретение непрерывно в режиме реального времени получает от собственных устройств (акселерометр и гироскоп) информацию о вибрационных и ударных воздействиях и углах наклона по месту установки, эти данные передается по каналам радиосвязи в локомотивную систему управления и в диспетчерский центр, где они анализируются и пронимаются решения по режиму ведения поезда. Параллельно, изобретение непрерывно оценивает поступающие данные от указанных датчиков и, в том случае, если в течение времени At превышают полученные значения превышают заложенные допуски, то изобретение производит пневматическое торможение поезда.
По радиоканалу заявленное изобретение получает команду на осуществление контроля текущих амплитудных значениях ускорений в трех плоскостях. Команда выглядит следующим образом:
0xF0C0 0x0002 0x0280,
где первые два байта - идентификатор типа команды (команда контроля), вторые два байта - идентификатор контролируемого параметра (контроль максимальной амплитуды вертикального ускорения), третий байт - значение контролируемого параметра (значение ускорения в м/с2 * 100.)
Таким образом, при угрозе схода тележки вагона с рельс заявленное изобретение обеспечивает детектирование этого события в реальном времени, передает параметры и оценки этих параметров по радиоканалам в диспетчерский центр и в локомотивную систему управления для принятия решения о дальнейшем режиме движения поезда. Также, сопоставляя получаемые значения с заложенными допусками, изобретение может произвести пневматическое торможение поезда, как по команде от диспетчерского центра, так и самостоятельно, тем самым предотвращая дальнейшее развитие аварии до возможного крушения поездов с человеческими жертвами и существенными материальными потерями. Использование заявленного изобретения позволяет повысить безопасность движения поезда и поездопотока, а также повысить пропускную способность железнодорожных линий.
Пример 5. Управление поезд опотоком с использованием заявленного изобретения.
Заявленное изобретение непрерывно в режиме реального времени получает от собственных устройств приема информации спутниковой навигационной системы текущую географическую координату, микропроцессорный модуль производит ее корректировку по данным от магнитометра и акселерометра, формируя точную географическую координату своего текущего расположения (хвоста поезда). Затем изобретение передает эту координату по каналам радиосвязи в удаленный диспетчерский центр по контролю занятости блок участков. Локомотивная система безопасности и управления идущего следом поезда получает из диспетчерского центра информацию о координате хвоста впередиидущего поезда и рассчитывает допустимую скорость движения и тормозные траектории исходя из текущего расстояния до хвоста впередиидущего поезда.
Таким образом, при наличии в заявленного изобретения в составе поездов, находящихся на одном участке движения, управление поездопотоком может осуществляться по технологии «плавающих» блок участков. При организации поездопотока использована информация о точной координате последних вагонов каждого поезда в составе поездопотока. Использование заявленного изобретения позволяет повысить безопасность движения поезда и поездопотока, а также повысить пропускную способность железнодорожных линий.
Реферат
Изобретение относится к средствам контроля целостности поезда. Устройство включает в себя приемник-передатчик радиосигналов дальнего поля действия, приемник-передатчик радиосигналов ближнего поля действия, приемник сигналов спутниковых навигационных систем, микропроцессорный модуль приема и обработки информации, датчик температуры, датчик давления, акселерометр, гироскоп, магнетометр, клапан сброса давления, часы реального времени, контроллер питания, преобразователи напряжений, батарею питания, генератор переменного тока, соединенные посредством информационно управляющей шины и шины питания. Достигается повышение безопасности движения. 6 з.п. ф-лы, 1 ил.
