Описание схемы параллельных путей - RU2676597C2
Код документа: RU2676597C2
Чертежи




Описание
ОБЛАСТЬ ИССЛЕДОВАНИЯ
[0001] Рассматриваемые варианты изобретения представляют способ для увеличения возможности улучшения безопасности путем предоставления информации, связанной с переключением курса/маршрута поезда с использованием путевой сигнализации.
УРОВЕНЬ ТЕХНИКИ
[0002] Различные известные системы обеспечения безопасности движения поезда разрабатываются во всем мире с целью предоставить технические железнодорожные устройства для обеспечения безопасной эксплуатации в случае ошибке по вине человека.
[0003] Положительный Контроль Движения Поезда (РТС) относится к известной технологии, которая разработана для предотвращения столкновения между поездами, схода с рельсов из-за превышения скорости, несчастных случаев или ранений работников железнодорожного полотна, работающих в пределах разрешенных ограничений, в результате несанкционированного вторжения поезда, и также предотвратить движения поездов по стрелке, оставленной в неправильном положении. Хотя системы РТС сильно различаются в сложности и степени детализации, основанной на уровне автоматизации и функционала, который они выполняют, используемой архитектуре системы и уровню контроля поезда, которому они могут соответствовать, системы РТС нетерпимы к противоречиям, в том, что это системы сигнализации и контроля поездов на базе процессора (см. Заголовок 49 Свода нормативных актов, Часть 236, Глава Н), которые используют и компьютерные, и радио каналы связи для осуществления функций РТС, таких как наблюдение и контроль за движениями поезда для обеспечения повышенной безопасности.
[0004] Более конкретно, РТС предусматривает, что поезд получает информацию о своем местоположении и о том, где разрешен безопасный проезд, т.е. "команду на движение". Оборудование в поезде улучшает эти команды на движение и при этом препятствует небезопасному движению. Системы РТС часто используют Глобальную Спутниковую Навигационную систему (GPS) для отслеживания движения поезда или задействуют другой механизм для расчета своего местонахождения. Таким образом, РТС используется для обеспечения интервального регулирования поездов или предотвращения столкновений, контроля максимальной скорости, временного ограничения скорости и гарантии безопасности работников железнодорожного полотна.
[0005] Однако другие различные преимущества могут быть получены в результате использования РТС; например, информация, полученная и проанализированная РТС системой, может разрешить встроенным или внешним системам контролировать поезд и входящий в его состав локомотив для увеличения топливной эффективности и осуществления диагностики локомотива для усовершенствования обслуживания. Так как данные, используемые РТС системой, передаются беспроводным способом, другие приложения также могут использовать эти данные.
[0006] Ранее системы обеспечения безопасности движения поезда обозначались как "остановки поезда", что до сих пор используется в различных системах метрополитена. В таких вариантах осуществления, помимо того, что каждый сигнал представляет собой подвижной зажим, который контактирует с клапаном проходящего мимо поезда, если сигнал красный, и открывает тормозную магистраль, таким образом, позволяя поезду экстренно затормозить; если сигнал зеленый, зажим развернут в другую сторону и не препятствует движению поезда.
[0007] Другие системы включают в себя систему Integra-Signum, где на поезда оказывается воздействие только в определенном местоположении, например, даже если поезд игнорирует красный сигнал, применяется система экстренного торможения, и двигатели локомотива прекращают работу. Также, такие системы часто требуют, чтобы машинист подтвердил предупредительные сигналы (например, Непрерывная Автоматическая Система Оповещения, CAWS), показывающие знаки "стоп" или "внимание"; если машинист не ответит на сигнал, произойдет остановка поезда. Такой вариант осуществления обеспечивает соответствующую длину тормозного пути для поездов, следующих друг за другом; однако такие системы на основе подтверждения не всегда предотвращают аварии на станциях, где пересекаются железнодорожные пути, так как расстояние от красного сигнала до следующего препятствия может быть слишком короткое, чтобы поезд успел затормозить до полной остановки.
[0008] Более усовершенствованные системы, например PZB или Indusi, представляют прерывистую локомотивную сигнализацию и систему обеспечения безопасности движения поезда, которая рассчитывает тормозную кривую, которая определяет, остановится ли поезд до следующего красного сигнала, и, если поезд не может этого сделать, тормозит. Один недостаток в этом подходе заключается в том, что если сигнал переключается на зеленый, не допускается ускорение поезда перед сигналом. Для решения этой проблемы, некоторые системы, такие как Linienzugbeeinflussung, разрешают размещение дополнительных магнитов между предупреждающими и проходными сигналами или непрерывную передачу данных от системы сигнализации на встроенный компьютер.
[0009] Новейшие известные системы обеспечения безопасности движения поезда РТС используют локомотивную сигнализацию, отличающуюся тем, что поезда постоянно получают информацию об их взаимном расположении относительно других поездов. В таких системах встроенные процессоры используют программное обеспечение, показывающее машинисту, с какой скоростью он может вести поезд, вместо того, чтобы он полагался на внешние сигналы. Системы такого типа используются повсеместно для высокоскоростных поездов, где скорость поездов затрудняет или не позволяет машинисту прочитать внешние сигналы, а длины составов или расстояний между предупреждающими и проходными сигналами слишком коротки, чтобы поезд мог затормозить.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0010] В соответствии с рассматриваемыми вариантами осуществления, представлены система и способы, которые позволяют или дают возможность машинисту обнаружить, когда его поезд изменит или уже изменил маршрут или путь. В соответствии с рассматриваемыми вариантами осуществления, система и способы могут работать автоматически, реагируя на переключение маршрута или пути поезда, не задействуя машиниста.
[0011] Рассматриваемые варианты осуществления позволяют автоматически определять маршрут, на котором находится поезд в текущий момент, и маршрут, на который поезд собирается переключиться.
[0012] Также, рассматриваемые варианты допускают возможность рассчитать переключение маршрута/пути, прежде чем оно осуществится. Таким образом, рассматриваемые варианты осуществления созданы так, чтобы как можно более эффективно предоставить необходимые инструкции по управлению поездом в связи с изменением маршрута/пути, помимо только реагирования на изменение маршрута/пути.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] ФИГ. 1 иллюстрирует систему железнодорожных путей, где рассматриваемые варианты могут применяться для усовершенствования поезда и стрелочной навигации;
[0014] ФИГ. 2 иллюстрирует вариант стрелки, которой можно управлять в соответствии с рассматриваемыми вариантами;
[0015] ФИГ. 3 иллюстрирует второй вариант стрелочной схемы, которой можно управлять в соответствии с рассматриваемыми вариантами;
[0016] ФИГ. 4 иллюстрирует третий вариант стрелочной схемы, которой можно управлять в соответствии с рассматриваемыми вариантами;
[0017] ФИГ. 5 иллюстрирует вариант интерфейса пользователя, представленного для системы управления поездом, контроля поезда и системы помощи машинисту;
[0018] ФИГ. 6 иллюстрирует четвертый вариант стрелочной схемы, которой можно управлять в соответствии с рассматриваемыми вариантами;
[0019] ФИГ. 7А-С иллюстрируют способ, представленный в соответствии с рассматриваемыми вариантами, для усовершенствования стрелочной навигации;
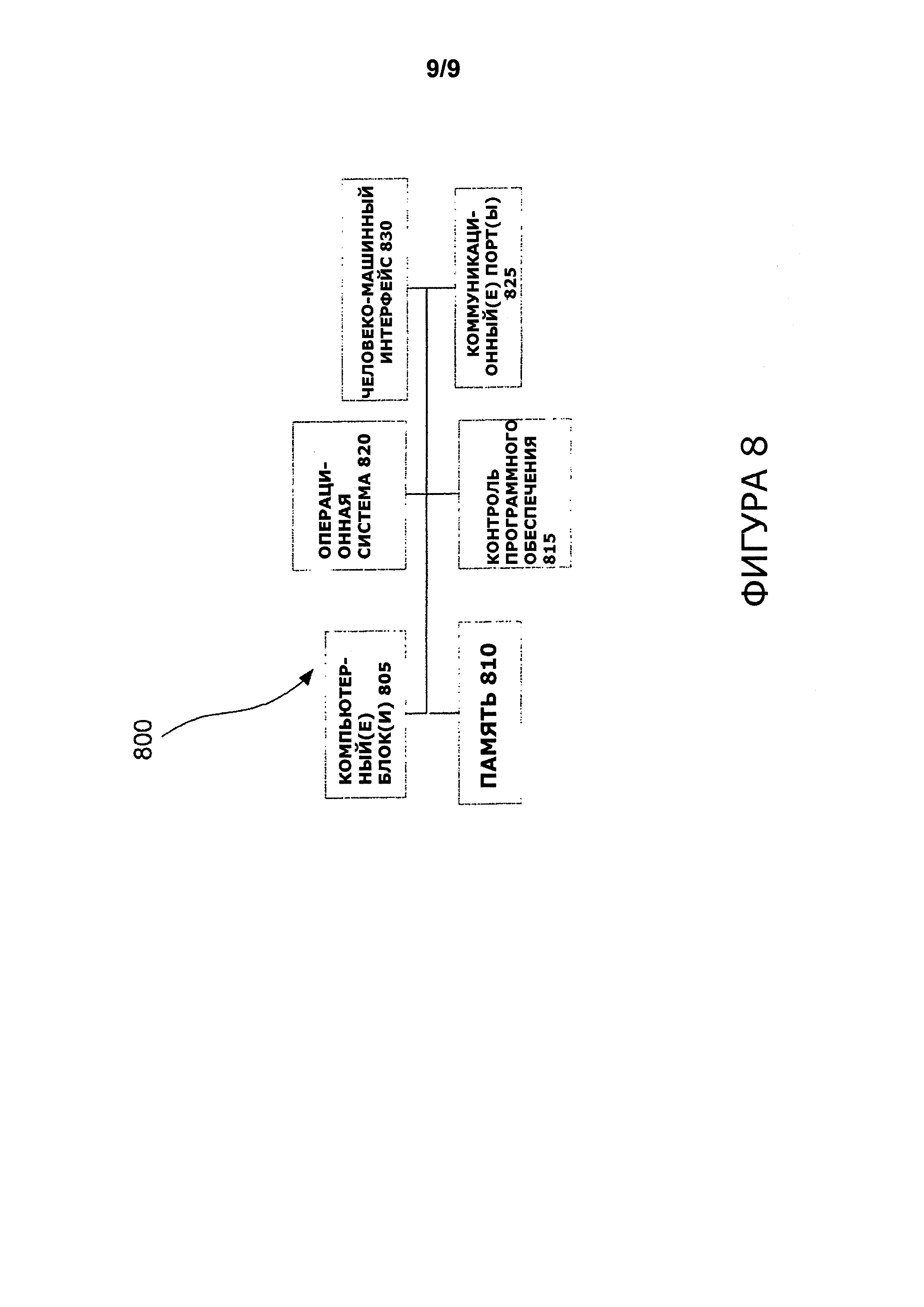
[0020] ФИГ. 8 иллюстрирует вариант устройства, которое может использоваться для обеспечения рассматриваемых вариантов осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Рассматриваемые варианты улучшают возможность машиниста обнаружить, когда его поезд переключится или уже переключился на маршрут или путь. В соответствии с рассматриваемыми вариантами осуществления, система и способы могут работать автоматически, реагируя на переключение маршрута или пути поезда, не задействуя машиниста.
[0022] Согласно настоящему рассмотрению, описания относятся к сигналам и особенностям Автоматического Обеспечения Защиты Движения Поезда (АТР). Должно быть понятно, что настоящие рассматриваемые варианты осуществления могут использоваться вместе с системами АТР и/или другими системами РТС, используемыми во всем мире. В связи с этим, любая отсылка к особенностям как АТР, так и РТС системы только лишь иллюстративна и не ограничивает практическую ценность настоящих рассматриваемых вариантов осуществления.
[0023] Повсеместное использование технологии определения местоположения Глобальной Навигационной Системы (GPS) для определения переключения маршрута/пути не используется на практике по ряду причин. Во-первых, при реализации технология GPS не различает гарантированно параллельные пути, находящиеся близко друг к другу. Также GPS не может предусмотреть переключение маршрута; таким образом, использование технологии GPS не обеспечивает машинисту гарантированную помощь в управлении поездом.
[0024] Для решения этих проблем, рассматриваемые варианты осуществления могут быть реализованы для улавливания сигналов на перегоне и выбора подходящего маршрута, исходя из полученной информации. Также, рассматриваемые варианты осуществления позволяют автоматически определять маршрут, на котором находится поезд в текущий момент, и маршрут, на который поезд собирается переключиться.
[0025] Таким образом, рассматриваемые варианты осуществления улавливают информацию сигналов на перегоне и выбирают подходящий маршрут в соответствии с полученной информацией для автоматического определения маршрута, на котором находится поезд в данный момент, и маршрута, на который поезд собирается переключиться, когда приближается одна или несколько стрелок (то есть местоположение удобного момента, чтобы переключиться на другой путь или маршрут). Таким образом, рассматриваемые варианты осуществления улучшают возможность рассчитать переключение маршрута/пути до того, как оно произойдет, и предоставить инструкции по управлению поездом машинисту в соответствии с изменением маршрута/пути, помимо только лишь реагирования на изменения маршрута/пути.
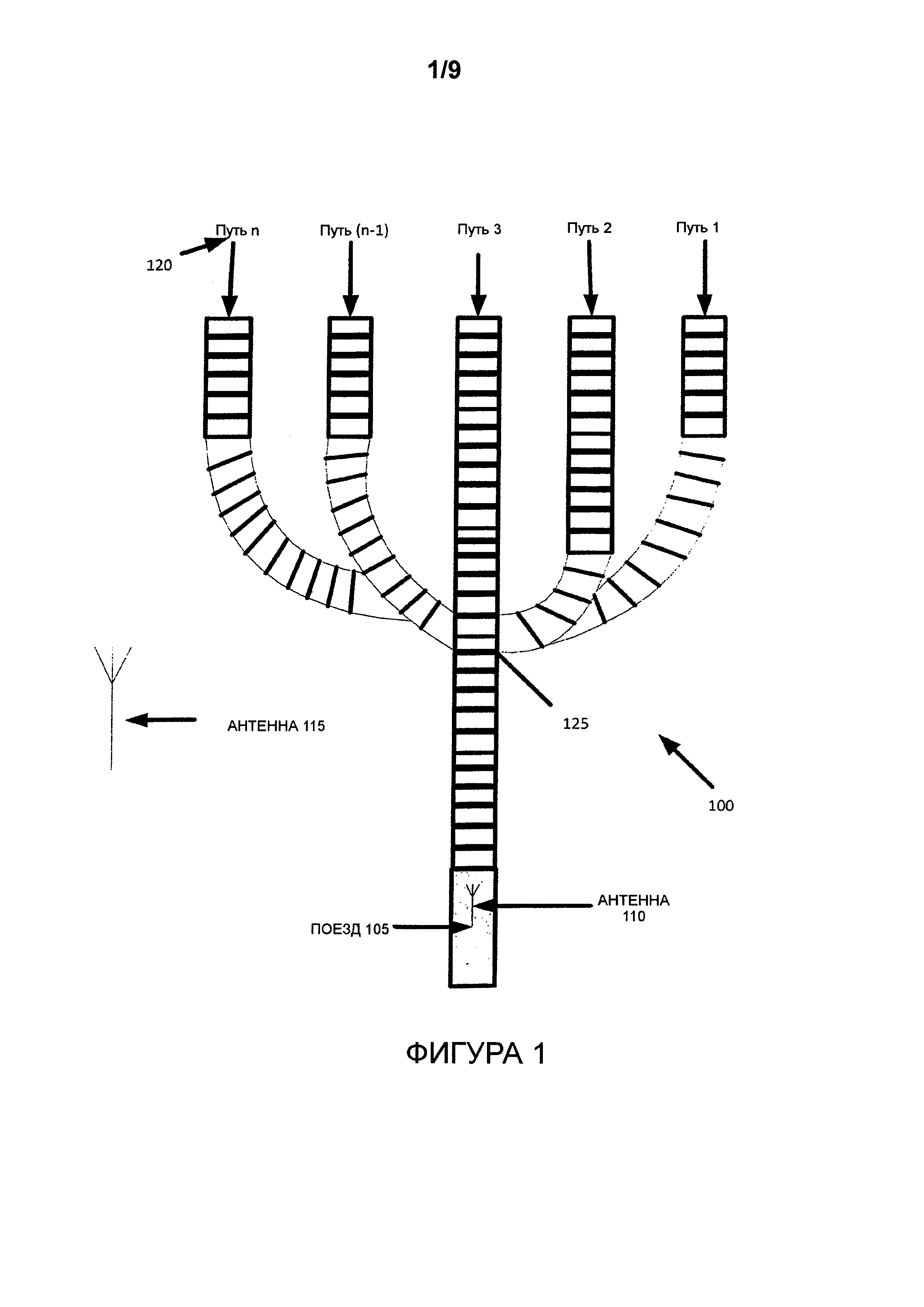
[0026] Например, как показано на ФИГ. 1, внутри системы железнодорожных путей 100, поезд 105 может идти по пути, включающему различные альтернативные пути 120 (пути 1-n). Рассматриваемые варианты осуществления используют связь сигналов между антенной 110, расположенной на поезде, и одной или несколькими перегонными антеннами 115, для определения местоположения поезда относительно местоположения приближающейся стрелки 125, где поезд может переключиться на другой путь 120.
[0027] В общем, системы РТС, также как и Автоматическое Обеспечение Защиты Движения Поезда (АТР), представляют три типа знаков на стрелку: Магистраль (означающее, что поезду дан сигнал оставаться на Магистральном Пути (ML)), Левая Стрелка (означающее, что поезду дан сигнал повернуть на приближающуюся Левую Стрелку (LT) и Правая Стрелка (означающее, что поезду дан сигнал повернуть на приближающуюся Правую Стрелку (RT)).
[0028] Используя различные известные системы АТР (или РТС), знак на стрелку может быть получен от команд кабины машиниста, которые могут контролироваться внутренней блокировкой. Например, они могут посылаться на частоте 40 Гц по железнодорожным путям и приниматься катушками, расположенными перед передними колесами. В такой ситуации может быть 4 различных команды кабины машиниста: код-LoA = конец следующего участка); код-75 (Следующий "сигнал" у "стоп", т.е. LoA = конец текущего участка); код 120 (Следующий "сигнал" у "осторожно", т.е. LoA = конец следующего участка); код-180 (Следующий "сигнал" у "чисто", т.е. LoA = не определен до конца следующего участка). Таким образом, в такой реализации, когда программа кабины машиниста выдает код-50, система АТР может определить информацию о повороте как "LT", так и "RT", на Левую Стрелку или на Правую Стрелку соответственно. Для других команд, информация о стрелке может быть "ML" для Магистрали.
[0029] Информация о стрелке применяется к следующему маршруту после следующего сигнала по направлению движения. Так, знак на стрелку АТР может в принципе рассматриваться как предварительный знак на стрелку или инструкция.
[0030] В соответствии с по крайней мере одним из рассматриваемых вариантов осуществления, знаки на стрелку передаются на программное обеспечение контроля поезда через сигналы связи, передающиеся с каждой сигнальной антенны перегона 115 на антенну 110 на поезде. Таким образом, знаки на стрелку доступны для чтения на протяжении всей длины маршрута и могут меняться после прохождения мимо каждого сигнала, полученного с каждой из множества антенн (например, антенны 115), представленных на всем перегоне пути.
[0031] Используя информацию о сигнале с перегонной антенны, программное обеспечение, работающее на поезде, лучше определит настоящее местоположение поезда объективно и относительно различных маршрутов/путей 120, как и получит предварительные знаки на стрелку для стрелок, приближающихся на пути 120 на основании текущего профиля поезда, где текущий профиль определяется как текущий определенный маршрут по сети путей, по которому поезд собирается следовать. Однако текущий профиль может меняться на любой стрелке или пересечении в сети путей.
[0032] Более того, благодаря использованию информации о сигнале на перегоне, системы контроля, реализуемые в программном обеспечении поезда, способны получать, обрабатывать и отвечать на изменения знака на стрелку, когда поезд приближается к стрелке. Это может происходить потому, что маршрут фактически способен меняться, пока поезд движется согласно маршруту, когда присутствует изменение статуса следующего маршрута, например, из-за АТР, которое основано на различных полевых условиях, таких как дефект пути или обновленное состояние пути. В результате, знак на стрелку АТР может измениться, когда поезд приблизится к следующему маршруту.
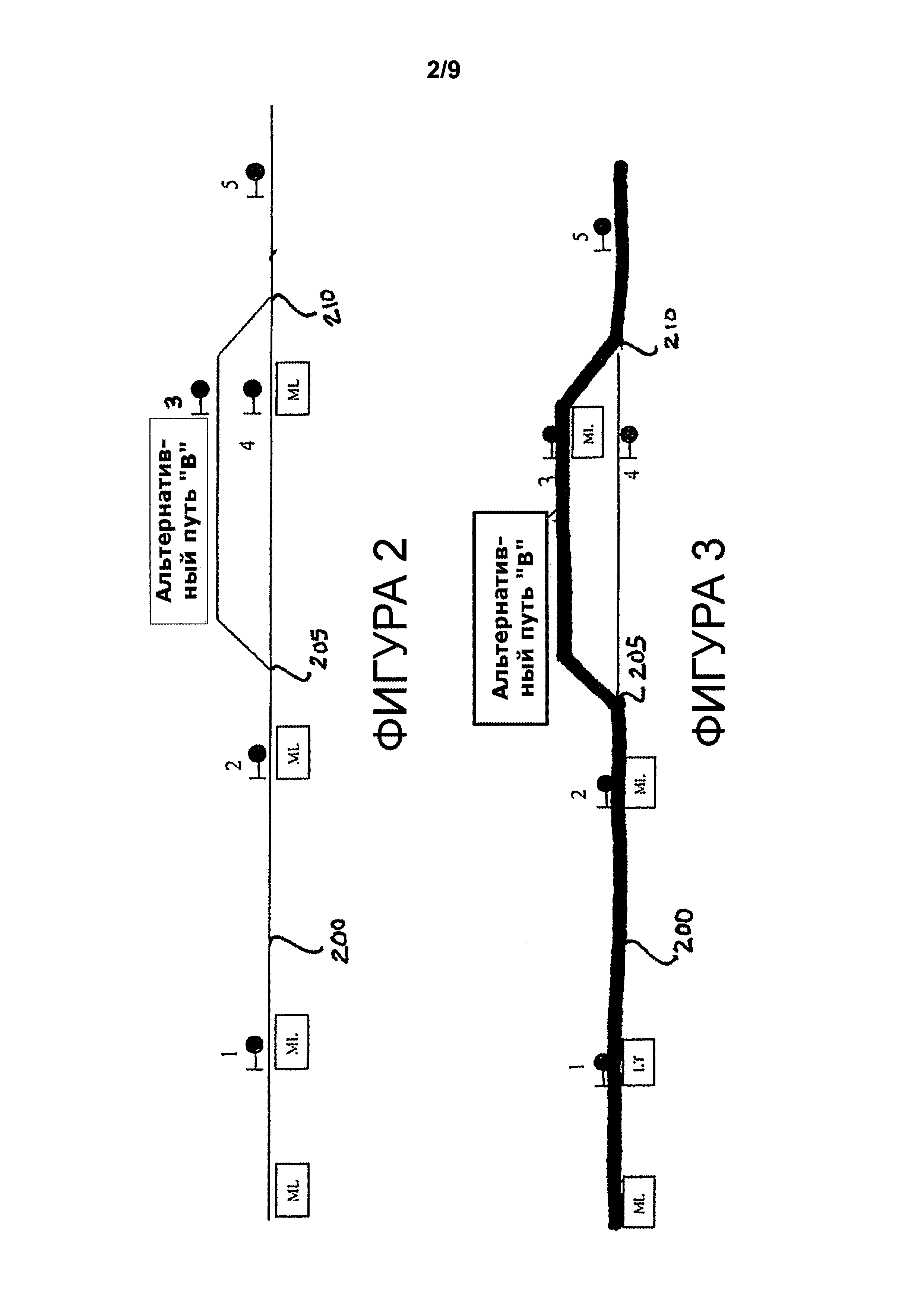
[0033] ФИГ. 2 показывает отображенный на дисплее знак на стрелку АТР, когда поезд двигается на Магистрали (ML). Ячейка с "ML", "RT" или "LT", расположенная под путем 200, показывает машинисту отображенный на дисплее знак на стрелку, полученный с антенны (например, антенны 115, показанной на ФИГ. 1) в данном местоположении. Следует отметить, что поезд не переключается на Альтернативный путь "В" на стрелке 205, так как поезду был дан сигнал оставаться на Магистрали (ML) с помощью Сигналов (например, со связанных придорожных антенн) 1, 2 и 4.
[0034] ФИГ. 3 иллюстрирует, как отображается на дисплее знак на стрелку АТР, когда поезд поворачивает на Левую Стрелку около обгонных путей и продолжает движение. Следует обратить внимание, что поезд, который принял Сигнал 1, поворачивает на Левую Стрелку. Однако знак на стрелку меняется обратно на "ML" после прохождения Сигнала 2, когда машинист уже проинформирован о том, что стрелка LT находится между Сигналом 1 и Сигналом 2. Далее, этот Магистральный сигнал ML удерживается на Сигнале 3, и поезд возвращается на Магистраль ML с Резервного Пути "В" на стыке путей 210.
[0035] Должно быть понятно, что можно ожидать сигналы для продолжения движения по LT после того, как голова поезда миновала начало Резервного пути В. В другом случае, поезду может быть дан сигнал ML перед тем, как поезд начнет движение по LT; таким образом, с другой стороны, можно ожидать, что поезд уже не повернет на перекрестке и останется на ML. Возможна любая реализация, и точка, в которой меняется сигнал, может настраиваться по предпочтительным требованиям безопасности или может быть установлена системой.
[0036] В соответствии с рассматриваемыми вариантами осуществления программное обеспечение контроля поезда должно сохранять Текущий Путь как Резервный Путь "В" до того, как конец поезда закончит выход из петли (например, Резервный Путь В вместе с той частью "А" Магистрали ML, которая параллельна Резервному Пути "В"), так что натурный лист поезда отображается отчетливо в петле, и применяются правильные ограничения по скорости от АТР.
[0037] Однако в то же время разрешенное изменение знака на стрелку на пути между Сигналом 1 и Сигналом 2 потребует, чтобы Текущий Путь был установлен соответственно. Таким образом, рассматриваемые варианты осуществления используют установку ретрансляторов АТР, связанных с Сигналом; в соответствии с рассматриваемыми вариантами осуществления, система управления поезда, контроля поезда и система помощи машинисту (например, коммерчески доступные системы марки New York Air Brake торговой марки "LEADER") в поезде, которые, минуя данные ретрансляторы, принимают информацию с ретрансляторов с помощью сообщения Ретранслятора АТР. Таким образом, система управления поездом, контроля поезда и система помощи машинисту могут использоваться для определения типа изменения знака на стрелку. Например, если знак на стрелку меняется перед Сигналом 2, показанным на ФИГ. 3, значение Текущего Пути может незамедлительно поменяться. Впоследствии, если знак на стрелку меняется после Сигнала 2 (который всегда возвращается на "ML"), значение Текущего Пути может быть проигнорировано, и значение Текущего Пути может быть установлено обратно на 'А', пока конец поезда закончит выход из петли.
[0038] В соответствии с рассматриваемыми вариантами осуществления, система управления поездом, контроля поезда и система помощи машинисту, использующие рассматриваемые варианты, могут использовать максимальную скорость АТР на перегоне и максимальной скорости поезда АТР для помощи машинисту.
[0039] Одно ограничение традиционного использования информации о стрелке АТР состоит в том, что система управления поездом, контроля поезда и системы помощи машинисту не могут устанавливать различие между несколькими маршрутами "RT" или несколькими маршрутами "LT", где более двух маршрутов могут присутствовать на одном сигнале.
[0040] Более конкретно, рассмотрим вариант схемы, показанный на ФИГ. 4. Как показано в данной фигуре, если два маршрута "LT" 410, 415 ведут к двум различным пунктам назначения, например к шахтам, тогда каждый вариант должен иметь различный профиль в системе управления поездом, контроля поезда и системе помощи машинисту. Соответственно, последующие маршруты в различных профилях будут, вероятно, иметь фактически различные ограничения по скорости, однако, система управления поездом, контроля поезда и система помощи машинисту не будут иметь возможности определить это заранее, основываясь только на АТР знаке на стрелку "LT" перед Сигналом 1, показанным в ФИГ. 1.
[0041] В результате, традиционная система управления поездом, контроля поезда и системы помощи машинисту не будут способны представить правильные настройки регулятора/тормоза, ведущие к Сигналу 1, пока не подтвердится статус переключения после обнаружения нескольких ретрансляторов на заведомо другом профиле. Это происходит потому, что любое выполнение с предвидением "Look Ahead", которое осуществляется с прогнозированием будущей динамики движения поезда, включающим: скорость, ускорение, тормозные силы и внутрипоездные силы, установленные текущими настройками контроля поезда (т.е. настройки регулятора, реостатного тормоза и пневматического тормоза) и их последующее сравнение с параметрами пути (т.е. ограничениями скорости и параметрами движения) по системе управления поездом, контролю поезда и системе помощи машинисту, не может в действительности включать правильные ограничения скорости.
[0042] Один из вариантов для решения данного вопроса состоит в том, чтобы затребовать у машиниста определять любое изменение пункта назначения, используя интерфейс пользователя системы управления поездом, контроля поезда и системы помощи машинисту. Как показано на ФИГ. 5, такой механизм для системы управления поездом, контроля поезда и системы помощи машинисту может быть представлен для того, чтобы затребовать у машиниста поезда выбрать две иконки для выбора другого пункта назначения.
[0043] Таким образом, как показано на ФИГ. 5, интерфейс пользователя 500 может включать иконку 505 "Изменение Пункта Назначения" в основном ряду сенсорных клавиш действий, представленных на экранном интерфейсе пользователя. Таким образом, после того, как сделан выбор иконки "Изменение Пункта Назначения" машинистом поезда, система управления поездом, контроля поезда и система помощи машинисту может работать для определения направления движения (например, основываясь на увеличении расстояния или уменьшении расстояния) поезда и, в зависимости от направления движения, выводить на дисплей список возможных пунктов назначения, связанных с этим направлением движения, основываясь на данных системы поезда, доступных для системы управления поездом, контроля поезда и системы помощи машинисту (например, в сохраненной встроенной памяти и доступной одному или нескольким процессорам, работающим на программном обеспечении для реализации системы управления поездом, контроля поезда и системы помощи машинисту, или доступной через получение данных, хранящихся вне поезда, через интерфейс коммуникации, реализуемый в системе управления поездом, контроля поезда и системе помощи машинисту).
[0044] После выбора нового направления, связанного с одним из отображенных на дисплее возможных направлений, система может затем обновить текущий профиль и переключиться на него, чтобы обеспечить машинисту поезда помощь, основываясь на этом профиле.
[0045] Соответственно, рассматриваемые варианты осуществления дают возможность увеличить степень частичного совпадения с другими маршрутами, так что выполнение с предвидением "Look Ahead" в системе управления поездом, контроля поезда и системе помощи машинисту дает доступ к ограничениям скорости, отмеченным системой АТР для другой магистрали, когда приближается перекресток. Это возможно благодаря схеме профиля путей и поддержки бэк-офиса (например, информации и инфраструктуры, управляемые и используемые пользователями, которые работают на поездах системы путей, где реализуются рассматриваемые варианты осуществления). Например, каждый другой маршрут, представляющий собой пересечение путей, может иметь свою часть пути, простирающуюся на, например, 3 мили, чтобы обеспечить предвиденную дистанцию "Look Ahead". Таким образом, когда программное обеспечение бэк-офиса получает данные об ограничении скорости, тогда программное обеспечение системы управления поездом, контроля поезда и системы помощи машинисту может создать ограничения по скорости для другого участка пути. Это позволяет системе управления поездом, контроля поезда и системе помощи машинисту с программным обеспечением Look Ahead использовать ограничения скорости в заданном профиле, когда знак на стрелку АТР уведомляет систему управления поездом, контроля поезда и систему помощи машинисту о приближающемся стрелочном съезде, как показано на ФИГ. 6.
[0046] Рассматриваемые варианты осуществления могут использовать заданную скорость АТР и расстояние, чтобы задать значение для обеспечения Помощи Машинисту. Более конкретно, когда определено заданное местоположение, АТР может вести обратный отсчет расстояния до цели, что было в сообщении АТР об Обновлении Экрана. Таким образом, система управления поездом, контроля поезда и система помощи машинисту могут рассчитать ближайшее заданное местоположение, например, на 5% ближе. Так, когда АТР ведет обратный отсчет расстояния до заданного местоположения, система управления поездом, контроля поезда и система помощи машинисту могут обновить целевое местоположение, если новое рассчитанное целевое местоположение ближе и составляет 5% от расстояния до цели, становясь ближе, когда поезд приближается к цели, следовательно, возможность рассчитанного целевого местоположения становится все дальше. Однако, если рассчитанное целевое местоположение дальше от текущего местоположения, более 1 км, тогда возможно допустить, что это подлинная протяженность Предела Разрешенного Ограничения (который может предоставить определенное местоположение текущего пути/маршрута, по которому поезду разрешено следовать, но не выходить за его пределы), и целевое местоположение может быть обновлено.
[0047] В соответствии с рассматриваемыми вариантами осуществления, стрелочный съезд между Магистралью в Восточном направлении (MLE) и Магистралью в Западном направлении (MLW) может быть также проведен более эффективно. В дополнение можно сказать, что отдельная схема (схожая с этапом принятия решения или таблицей переключения, используемой в системе управления поездом, контроля поезда и системе помощи машинисту) может определить целевой профиль в конце стрелочного съезда. Более того, ограничения по скорости в целевом профиле могут использоваться программным обеспечением с функцией предвидения Look Ahead системы управления поездом, контроля поезда и системы помощи машинисту, в то время, как поезд приближается к стрелочному съезду.
[0048] Однако подходящая навигационная система, используемая в системе управления поездом, контроля поезда и системе помощи машинисту, также запрашивает разрешенное изменение знака на стрелку, в месте приближения к стрелке (например, на участке между Сигналами 1 и 2 в ФИГ, 2-3), которое должно вести к Текущему Пути, установленному в соответствии с системой управления поездом, контроля поезда и системой помощи машинисту.
[0049] Соответственно, если изменение на стрелку меняется перед Сигналом 2, Текущий Путь меняется незамедлительно. Однако, если изменение на стрелку меняется после Сигнала 2 (который всегда будет возвращаться на "ML"), то изменение знака будет проигнорировано (таким образом, как показано на ФИГ. 2-3, текущий Путь будет установлен обратно на 'А', как только конец поезда закончит выход из петли.
[0050] В соответствии с рассматриваемыми вариантами осуществления, местоположение Сигнала 2 может быть определено с помощью небольшого дорожного знака или MP, где дорожный знак представляет собой определенное местоположение текущего значения профиля пути/маршрута, связанного с сигнальным элементом в сохраненных данных для сети путей, которые содержат ограничения по скорости для текущего пути и местоположения важных элементов для сети путей, таких как местоположения стрелок, ретрансляторов, "горячих" букс и т.д. В другом случае, местоположение может быть определено по значению небольшого MP, связанного с сигналом в файле схемы, используемой системой управления поездом, контроля поезда и системой помощи машинисту.
[0051] Для того, чтобы вычислить ошибки внутри системы управления поездом, контроля поезда и системы помощи машинисту, может быть представлено более раннее действительное местоположение сигнала (например, ближе к приближающемуся поезду), например, на 500 м ранее (это значение может изменяться в соответствии с работой системы управления поездом, контроля поезда и системой помощи машинисту).
[0052] В соответствии с рассматриваемыми вариантами осуществления, система управления поездом, контроля поезда и система помощи машинисту может быть выполнена с возможностью использовать сообщения ретрансляторов АТР для переключения профилей поезда. Должно быть понятно, что ретранслятор в железнодорожной системе может относиться к нулю или нескольким профилям путей системы управления поездом, контроля поезда и системы помощи машинисту. Сопоставляя ретранслятор со списком профилей путей системы управления поездом, контроля поезда и системы помощи машинисту, ретранслятор может быть обнаружен в конфигурационном файле, и система управления поездом, контроля поезда и система помощи машинисту способна автоматически переключить профиль пути, когда она получает сигнал ретранслятора с системы АТР.
[0053] Такой конфигурационный файл системы управления поездом, контроля поезда и системы помощи машинисту может удалить определенные лишние элементы, пользуясь тем преимуществом, что несколько ретрансляторов могут относиться к одной группе. Соответственно, группа ретрансляторов может определяться несколькими линиями маршрута АТР, Номером Группы Альтернативного Ретранслятора и рядом Мест Пути в группе. Таким образом, группа ретрансляторов может быть связана с набором профилей, где она обнаружена.
[0054] Более того, стандартный профиль пути может быть выбран для каждой группы ретрансляторов. Например, группа ретрансляторов на Западной Магистрали может иметь свой стандартный профиль, установленный как *MLW. Данный символ (*) может использоваться для выбора наиболее подходящего профиля, когда происходит переключение с MLE при том же отправлении и пункте назначения. Например, когда происходит переключение с 7M-BF через MLE после обнаружения ретранслятора, чьим стандартным профилем является *MLW, новый профиль может быть выбран в виде 7M-BF через MLW.
[0055] Принцип действия стандартного профиля может также использоваться при отклонении от узловой станции, там, где на пути следования находится много узловых станций, например, когда конечный пункт назначения поезда еще не известен. Сигнал может быть принят для связи со всеми параллельными маршрутами на этом участке.
[0056] Рассматриваемые варианты осуществления могут быть реализованы, по крайней мере отчасти, при помощи управления переходными состояниями для переменных данных. Управление следующими переходными состояниями может входить в обязанность текущего состояния. Таким образом, установка или очистка любого переменного состояния может также входить в обязанность текущего состояния перед переходными состояниями.
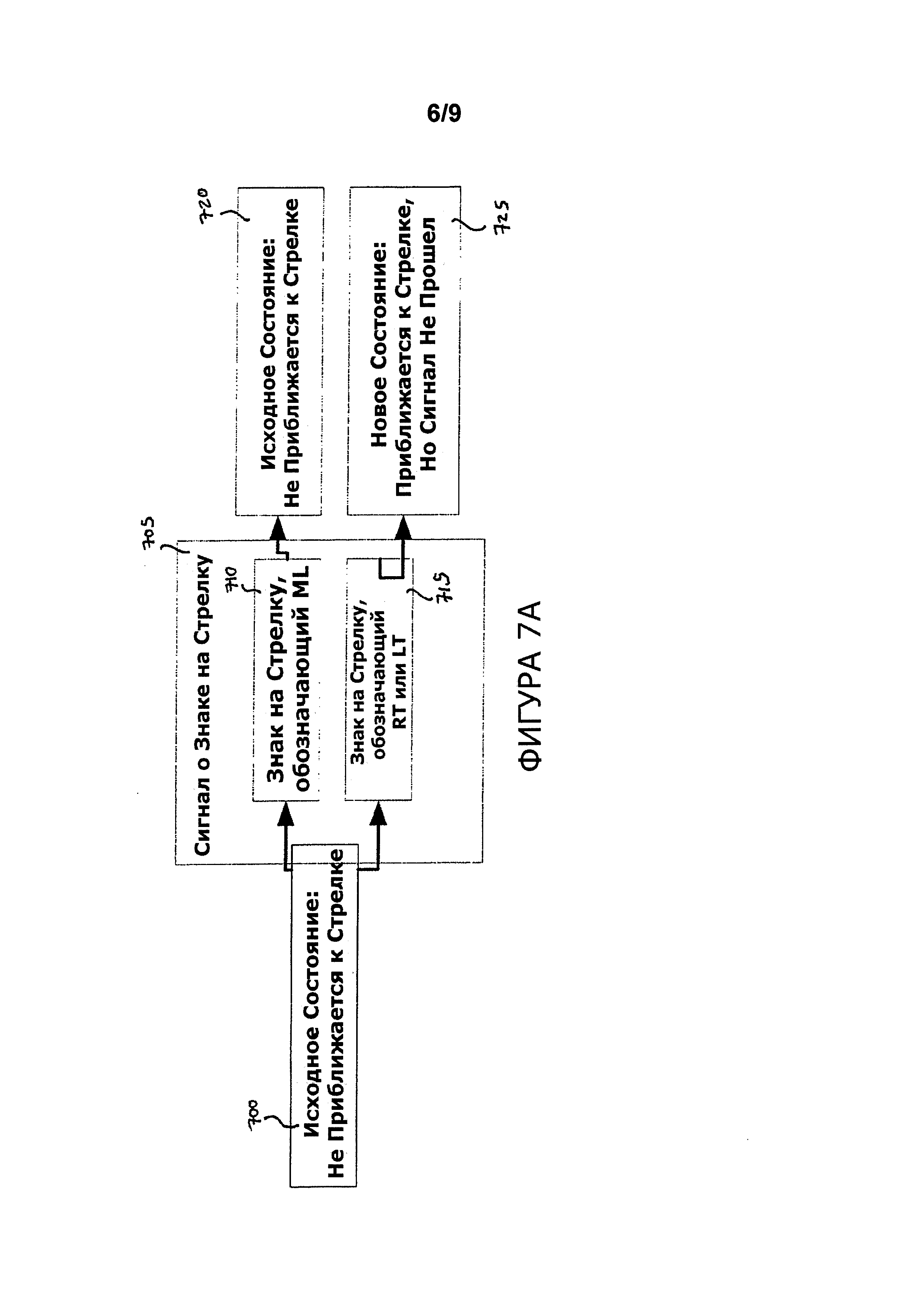
[0057] ФИГ. 7А-С иллюстрируют способ, представленный в соответствии с рассматриваемыми вариантами, для усовершенствования стрелочной навигации, где используются такие переходные состояния. Как показано на ФИГ. 7А, исходное состояние 700 может представлять собой момент, когда поезд не приближается к стрелке. Как только система управления поездом, контроля поезда и система помощи машинисту получает сигнал о знаке на стрелку 705 с придорожного ретранслятора, должно быть определено, является ли знак на стрелку ML (Магистралью) 710 или RT (Правой Стрелкойу/LT (Левой Стрелкой)715. Если знаком на стрелку является ML, то исходное состояние остается в виде "не приближается к стрелке" 720. Однако, если знаком на стрелку является RT/LT, то состояние переходит на "приближение к стрелке, но сигнал на стрелку не прошел" 725.
[0058] При этом состоянии 725, также показанном на ФИГ. 7В, при получение другого сигнала знака на стрелку 730 можно обнаружить два уведомления: знаком на стрелку является ML, или неопределенное значение 740, или знаком на стрелку является RT/LT 745. Если знаком на стрелку является ML или неопределенное значение, возможно, что приближение знака на стрелку было ошибочно, таким образом, состояние переходит обратно на "исходное состояние: не приближается к стрелке" 700.
[0059] С другой стороны, если знаком на стрелку было RT/LR 745, то определяется, находится ли текущее местоположение поезда перед местоположением стрелки 750, или после местоположения стрелки (плюс значение допуска, например, 1 км, для подтверждения точности переходного состояния). Если текущее местоположение поезда перед местоположением стрелки, состояние остается в виде "приближение к стрелке, но сигнал на стрелку не прошел" 725; однако, если текущее местоположение поезда после стрелки, плюс значение допуска, состояние переходит на новое состояние "получен сигнал на стрелку" 760.
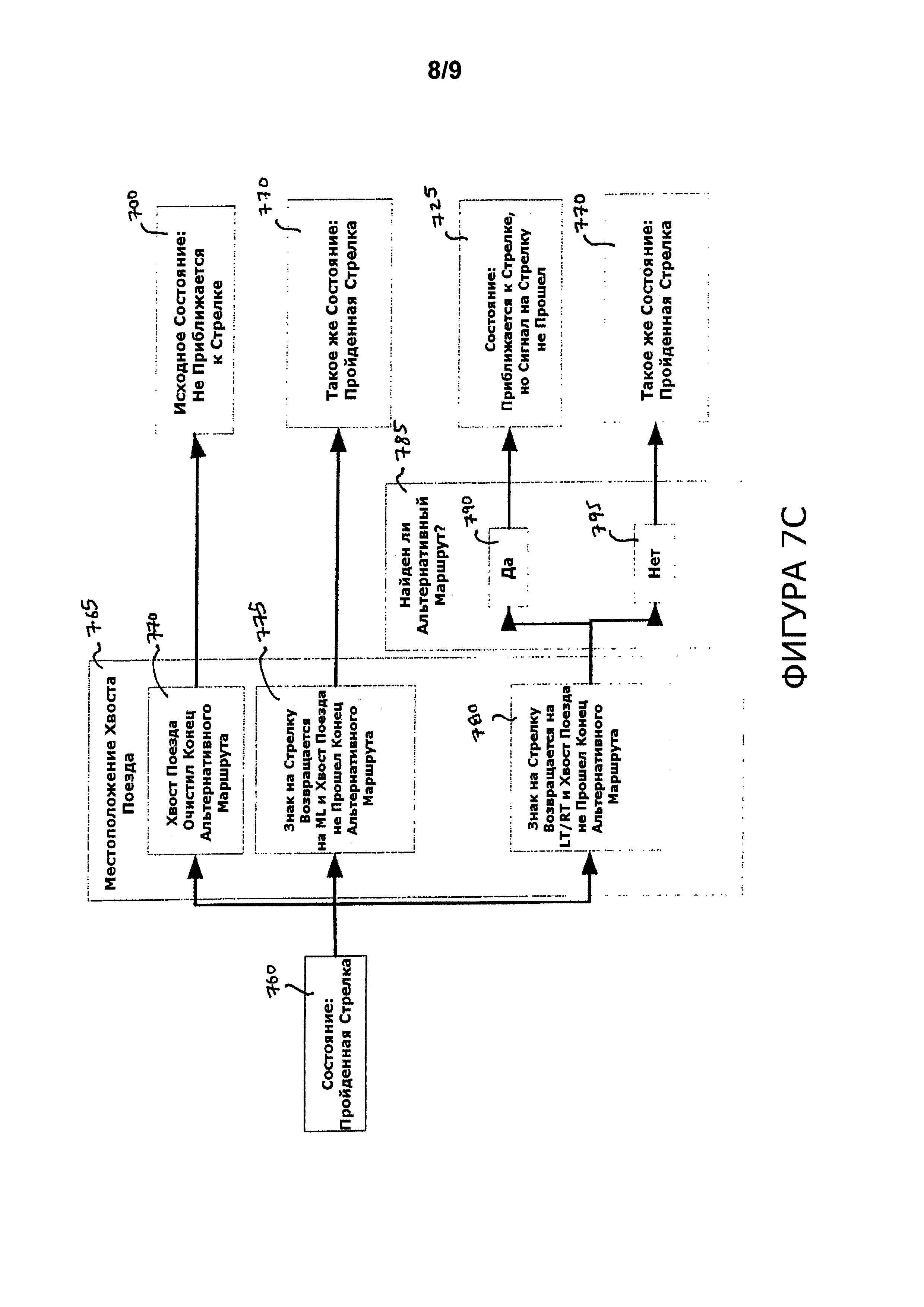
[0060] При этом состоянии 760, также показанном на ФИГ. 1С, определение осуществляется в соответствии с местоположением хвоста поезда 756, основываясь на полученных сигналах придорожного ретранслятора. Это определение включает в себя три характеристики: хвост поезда очистил конец альтернативного маршрута (например, Альтернативного Маршрута В, показанного в ФИГ. 2-3) 770, хвост поезда не прошел конец альтернативного маршрута и знак на стрелку возвращается на Магистраль (ML) 775, и хвост поезда не прошел конец альтернативного маршрута, но знак на стрелку возвращается на LT/RT 780. Если хвост поезда очистил конец альтернативного маршрута при 770, состояние переходит обратно в исходное состояние "не приближается к стрелке" 700. Если хвост поезда не прошел конец альтернативного маршрута и знак на стрелку сигнализирует возвращение на ML, то состояние остается в виде "пройденная стрелка" 770.
[0061] Определение при 780 проверяет вероятность наличия нескольких стрелок, и, в результате, наличие нескольких альтернативных маршрутов. Более конкретно, файловые данные, сохраненные в поезде или доступные поезду, могут использоваться программным обеспечением, реализуемым в системе управления поездом, контроля поезда и системе помощи машинисту, для обнаружения интересующих элементов в сети путей; такие интересующие области могут быть внесены в сохраненные данные, связанные с различными профилями пути. Обычно, идентификаторы на этих местоположениях определяют вероятность нескольких маршрутов и позволяют системе принять это во внимание, когда поезд находится в этих областях. Таким образом, на 780 определено, найден ли другой альтернативный маршрут 790, или нет 795. Если другой альтернативный маршрут найден на 790, состояние переход обратно на "приближение к стрелке, но сигнал на стрелку не прошел" 725 показан на ФИГ. 7А-В. Если альтернативный маршрут не найден, остается состояние "пройденная стрелка" 770 до тех пор, пока не получен сигнал от другого придорожного ретранслятора. Такие придорожные ретрансляторы (связанные с антенной 115, показанной на ФИГ. 1) часто могут располагаться каждые 10-15 км на протяжении железнодорожного пути.
[0062] Рассматриваемые варианты осуществления могут быть реализованы совместно с различными системами управления поездом, контроля поезда и системами помощи машинисту и их компонентами. Таким образом, должно быть понятно, что рассматриваемые варианты могут быть встроены или соединены с компонентами системы управления поездом, контроля поезда и системы помощи машинисту, которые включают, например, модуль системы РТС, который может включать аппаратное оборудование, программное обеспечение, встроенное ПО или какие-либо их комбинации, которые предусматривают индикацию скорости, регулятор скорости, по крайней мере, либо на локомотиве, либо на поезде, компонент, который динамически информирует регулятор скорости об изменении маршрута или состояний сигнала, и встроенную навигационную систему и базу данных профиля маршрута, применяемых для обеспечения установленных пределов скорости на всем маршруте следования поезда, двухсторонний канал связи, настроенный для того, чтобы информировать сигнальное оборудование о наличии поезда так, чтобы поддерживать связь с центральными системами РТС, которые настроены непосредственно дать команду на движение поездам.
[0063] Таким образом, вышеуказанные параметры могут применяться в различных комбинациях вышеуказанного аппаратного оборудования, программного обеспечения и встроенного ПО. Соответственно, для осуществления данных видов задач интеллектуальная система поезда, обеспечивающая осуществление этих задач, может включать (но не ограничиваться) оборудование, показанное на ФИГ. 8. Как показано в этой фигуре, интеллектуальная система поезда 800 может присутствовать в поезде 105 (показано на ФИГ. 1). Относительно реализации, интеллектуальная система поезда 800 может включать один или несколько компьютерных блоков обработки данных 805, которые могут быть соединены с памятью 810 (применяемой в качестве общеизвестных и коммерчески доступных программируемых и/или доступных только для чтения или перепрограммированных устройств памяти). Память 810 может служить для хранения компьютерных инструкций, связанных с или реализующих и контроль программного обеспечения 815, и операционной системы, или окружающей среды 820 для предоставления задач, включенных в одно или несколько компьютерных приложений, и закодированный пакет программного обеспечения и/или различные названные или включенные подпрограммы. Эти инструкции могут использоваться для осуществления инструкций, включенных в способы и определения, описанные выше.
[0064] Более того, интеллектуальная система поезда может также включать один или несколько коммуникационных портов 825, что позволяет и принимать, и передавать сообщения и сигналы (такие как сигналы, полученные с придорожных ретрансляторов), данные и диспетчерские команды в соответствии с рассматриваемыми вариантами осуществления. Далее, интеллектуальная систем поезда 800 может включать человеко-машинный интерфейс 830, который может включать, например, дисплей, позволяющий оператору получать и просматривать данные, используемые или выработанные интеллектуальной системой поезда 800, предоставлять инструкцию или вводить указания для контроля над программным обеспечением 815, получать доступ к данным, включенным в память 810, и т.д. В результате, человеко-машинный интерфейс 830 может также включать другие общеизвестные характеристики, включая клавиатуру, мышь, сенсорную панель, различные кнопки и переключатели, и т.д.
Реферат
Изобретение относится к области железнодорожной автоматики и телемеханики для управления движением поездом. Техническое решение включает систему управления поездом для встраивания в поезд, причем система управления поездом включает процессор, базу данных, связанную с процессором, которая включает профиль пути, имеющий заранее определенные параметры в отношении того, каким образом поезду следует работать на конкретном маршруте, и антенну для приема сигнала на знак на стрелку с придорожного ретранслятора. Причем процессор определяет местоположение поезда из сигнала на знак на стрелку и на оценку того, требуется ли изменение работы поезда в результате изменения конкретного маршрута, указанного сигналом на знак на стрелку, а также использует сигнал с придорожного ретранслятора для различия параллельных железнодорожных путей, находящихся поблизости друг от друга. Достигается повышение безопасности движения поездов. 2 н. и 17 з.п. ф-лы. 9 ил.
Комментарии