Способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для распознавания сигналов в железнодорожном движении, в частности рельсовом движении - RU2711556C1
Код документа: RU2711556C1
Чертежи


Описание
Изобретение относится к способу распознавания сигналов в железнодорожном движении, согласно ограничительной части пункта 1 формулы изобретения, к устройству для распознавания сигналов в железнодорожном движении, согласно ограничительной части пункта 13 формулы изобретения, и к железнодорожному транспортному средству для распознавания сигналов в железнодорожном движении, согласно ограничительной части пункта 30 формулы изобретения.
Железнодорожные транспортные средства являются составляющей частью современной транспортной инфраструктуры рельсовых средств сообщения и транспортных средств, которые движутся например, при качении по или под одной или двумя направляющими рельсами (рельсовыми путями), во взвешенном состоянии над или под магнитным полем или при подвеске на стальных тросах. Из указанных привязанных к колее средств сообщения и транспортных средств наиболее распространенными являются рельсовые транспортные средства, которые основаны на колесно-рельсовой системе, которые либо имеют собственный привод (моторный вагон) или тянуться или толкаются локомотивом, и в которых преимущественно стальные колеса направляются с помощью гребня бандажа на двух стальных рельсах, соответственно, путях.
Такие рельсовые транспортные средства в ближнем или дальнем сообщении, в противоположность не имеющим машиниста поездам метро или поездам для соединения с воздушными терминалами, зависят от того, что машинист должен оценивать предварительные сигналы и главные сигналы, такие как, например, путь свободен или путь занят, и выводить из них соответствующую тактику движения.
За счет этого обычно в управляемых машинистом железнодорожных транспортных средствах и особенно в рельсовых транспортных средствах могут возникать следующие сценарии:
Сценарий 1
Машинист моторного транспортного средства, как и все другие люди, иногда не внимательны или совершают ошибки в восприятии и поэтому инициируют иногда опасные для жизни действия, такие как ускорение транспортного средства или невыполнение процесса торможения транспортного средства.
Сценарий 2
Машинисты моторного транспортного средства не всегда имеются в распоряжении (например, из-за болезни, забастовки, непредвиденных дополнительных заказов транспортных услуг и т.д.), так что железнодорожные перевозки могут отменяться.
Возникновение этих указанных сценариев может быть устранено за счет автоматического распознавания сигналов, что, однако, до настоящего времени невозможно из-за следующих проблем:
А. Состояние сигналов не может распознаваться надежно, без выполнения устройства связи между перегоном, соответственно, центральным постом и рельсовым транспортным средством.
В. Неправильные сигналы, такие как, например, поврежденные сигналы или временные сигналы в местах строительства, не могут распознаваться.
С. Релевантные сигналы не могут надежного отличаться от нерелевантных сигналов (например, бокового пути или противоположного направления).
Предпринимались попытки решения названных проблемы при осуществлении автоматизированного распознавания сигналов и соответствующего влияния на движение железнодорожного транспортного средства, соответственно, рельсового транспортного средства, за счет дополнительных инвестиций в путевую инфраструктуру, таких как индукционные петли, вычислители вдоль пути и установки связи между поездом и компонентами пути. Поэтому соответствующие решения являются экономичными лишь на путях обозримой длины, таких как, например, линии метро или пути между воздушными терминалами.
Положенная в основу изобретения задача состоит в создании способа, устройства и железнодорожного транспортного средства, в частности рельсового транспортного средства, для распознавания сигналов в железнодорожном сообщении, в частности рельсовом сообщении, в которых сигналы в железнодорожном сообщении, когда железнодорожные транспортные средства находятся на участке железной дороги железнодорожной сети, распознаются автоматически.
Эта задача решена, исходя из указанного в ограничительной части пункта 1 способа распознавания сигналов, с помощью указанных в отличительной части пункта 1 формулы изобретения признаков.
Кроме того, задача решена, исходя из определенного в ограничительной части пункта 13 формулы изобретения устройства для распознавания сигналов, с помощью указанных в отличительной части пункта 13 формулы изобретения признаков.
Кроме того, задача решена, исходя из определенного в ограничительной части пункта 30 формулы изобретения железнодорожного транспортного средства, с помощью указанных в отличительной части пункта 30 формулы изобретения признаков.
Лежащая в основе изобретения, согласно независимым пунктам 1, 13 и 30 формулы изобретения, идея состоит в том, что на основании
(i) занесенной в память в качестве опорных данных, измеренной вдоль участка пути в железнодорожной сети относительно географического окружения и управления сигналами железнодорожного движения, соотнесенной с местом опорной информация в виде опорной информации места и опорной информации состояния сигналов, полученной в контексте измерения контекстной и индикаторной информация и, возможно, дополнительной относящейся к этому метаинформации, а также
(ii) сравнения измеренной в режиме распознавания сигналов на основании данных положения рабочей информации места с занесенными в память опорными данными, распознается сигнал и/или состояние сигнала для управления железнодорожным движением на участке пути, при этом это за счет оценки релевантности и содержания информации признается верным тогда, когда при сравнении измеренной рабочей информации состояния сигналов для распознавания сигналов установлено, что полученная относительно рабочей информации места и соответствующая ей опорная информация места соответствуют содержащейся в опорных данных опорной информации состояния сигналов с учетом содержащейся в опорных данных контекстной и указательной информации, а также возможно имеющейся дополнительной метаинформации.
С помощью этого таким образом автоматически распознанного сигнала и/или состояния сигнала можно, согласно пп. 2, 3 и 14, 15 формулы изобретения, предпочтительно вычислять или выводить с учетом находящейся в памяти информации участка пути и информации железнодорожного транспортного средства, которые имеются в рельсовом транспортном средстве в виде информации рельсового участка пути и информации рельсового транспортного средства и относятся к техническому регулирующему механизму железнодорожного транспортного средства, соответственно, рельсового транспортного средства, а также к атрибутам и свойствам железнодорожного транспортного средства, соответственно, рельсового транспортного средства, по меньшей мере одну акцию движения. Эта вычисленная или выведенная акция движения может указываться машинисту транспортного средства в кабине машиниста железнодорожного транспортного средства, соответственно, рельсового транспортного средства, для поддержки его служебной деятельности в качестве рекомендации на индикаторном устройстве, или может использоваться в качестве подтверждения его путевого листа. Однако в качестве альтернативы можно также передавать вычисленную или выведенную акцию движения в автоматическую систему движения железнодорожного транспортного средства, соответственно, рельсового транспортного средства, для автоматического выполнения акции движения (в смысле автономного движения).
Кроме того, согласно п. 11 формулы изобретения, при динамическом управлении сигналами железнодорожного транспортного средства, когда подлежат распознаванию изображения сигналов с мигающими частями, предпочтительно повторяется распознавание сигналов для определенного положения, например, координаты места пути, согласно признакам а)-е) в п. 1 формулы изобретения, с коротким интервалом времени.
Вывод: За счет разумного сравнения измеренной в режиме распознавания сигналов рабочей информации места и состояния сигналов с находящимися в памяти опорными данными может достигаться, что
- надежно автоматически распознаются сигналы вдоль участков железной дороги без больших инвестиций в инфраструктуру;
- могут автоматически обрабатываться также аномальные сигналы, например, вследствие вандализма;
- могут различаться релевантные для данного железнодорожного транспортного средства, соответственно рельсового транспортного средства, сигналы от не релевантных сигналов;
- способ, согласно изобретению, соответственно устройство, согласно изобретению, со временем работают все лучше и надежнее;
- сигналы при неблагоприятных условиях видимости могут распознаваться более надежно, чем машинистом в уровне техники; и
- машинист не является необходимым для движения, так что независимо от его присутствия может выполняться движение.
Другие предпочтительные модификации изобретения указаны в остальных зависимых пунктах формулы изобретения.
Так, например, когда согласно пп. 14 и 16 формулы изобретения, измеренная для определенных данных положения (например, координат места пути или координат места на рельсах) рабочая информация места для компенсации неточностей измерения, например, потому что измерение происходит не всегда в точно одном и том же месте, опорной информации места в хранящихся опорных данных и рабочей информации места для указанной компенсации информации изменяется тем, что она с помощью технических средств искажается.
Кроме того, предпочтительно, когда, согласно пп. 7 и 19 формулы изобретения, для распознавания сигналов, наряду с измеренной информацией и полученной в контексте распознавания посредством оценки информации, привлекается также метаинформация, которая в соответствии со значением слова относится к признакам или свойствам измеренной информации и полученной в контексте распознавания посредством оценки информации, и содержит соответствующие данные. Кроме того, с помощью этой метаинформации может указываться, каким образом осуществляется управление сигналами с помощью генерированной информации калибровки, применяемой для управления сигналами установки относительно типа сигнальной установки и состояний сигнальной установки.
Кроме того, предпочтительно, когда согласно пп. 8 и 20 формулы изобретения, опорные данные создаются и запоминаются статически во время пробных поездок или на основании целенаправленного измерения географического окружения и управления сигналами персоналом железнодорожного транспортного средства на участке пути в железнодорожной сети, и, согласно п.п. 8 и 20, уже внесенные в память опорные данные динамически дополняются с помощью измеренной рабочей информации места и измеренной рабочей информации состояния сигналов. В частности, с помощью указанной последней меры может со временем достигаться все более лучшее и надежное распознавание сигналов.
Кроме того, предпочтительно, когда согласно пп. 12 и 28 формулы изобретения, статически созданные опорные данные или статически созданные опорные данные и соответствующие динамически дополненные созданные рабочие данные сравниваются внешне с соответствующими данными других железнодорожных средств всего флота железнодорожных транспортных средств и распределяются.
Кроме того, предпочтительно, согласно п. 24 формулы изобретения, с целью повышения достоверности измеренной информации (полученных данных) и тем самым распознавания сигналов, когда используются два измерительных приспособления, например, в одном устройстве распознавания сигналов.
Особенно простой, дешевый и эффективный метод (смотри пп. 10 и 22-27 формулы изобретения) измерения географического окружения и управления сигналами железнодорожного движения на участке железной дороги обеспечивается с помощью записывающего изображения прибора, который выполнен, например, в виде обычной видеокамеры или инфракрасной камеры, в виде изображения, например, в виде изображений окружающего ландшафта и сигнальной установки, при этом прибор записи изображений
а) выполнен с возможностью поворота,
b) имеет корректирующий компонент, который осуществляет оценку материала изображений с помощью также данных погоды и освещения,
с) имеет компонент изменения фокусного расстояния, который в зависимости от расстояния до сигнала выбирает правильный угол съемки, с целью оптимальной поддержки тем самым многократной оценки сигнала. За счет этого может учитываться не только расстояние до сигнала, но также различные ситуации съемки. Например, в этом случае могут выполняться съемки как на свободном участке (где требуется съемка на большом расстоянии, с целью обеспечения возможности своевременного реагирования при большой скорости движения), так и в зоне вокзалов (где требуются изображения с большой шириной),
d) имеет осветительный компонент, например прожектор, который работает в видимом и невидимом человеком диапазоне; за счет этого улучшается качество снимаемого ночью или при плохой погоде изображений.
Другие преимущества изобретения следуют из приведенного ниже описания примера выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг. 1 - измерение относящейся к месту опорной информации в железнодорожном движении относительно географического окружения и управления сигналами железнодорожного движения на частично изображенном участке железной дороги железнодорожной сети в опорном режиме с помощью устройства распознавания сигналов в железнодорожном транспортном средстве относительно определенного географического положения железнодорожного транспортного средства на участке железной дороги;
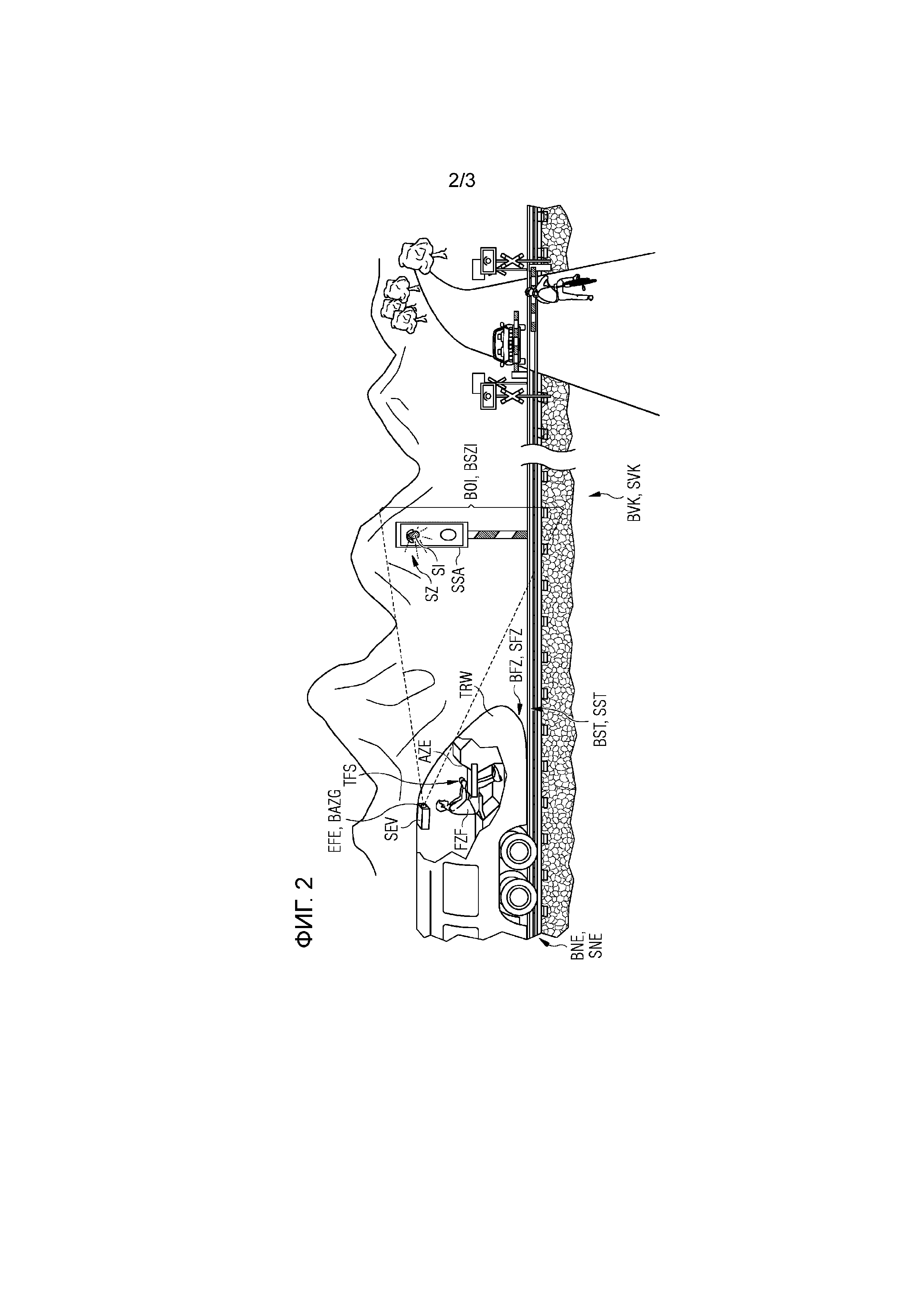
фиг. 2 - исходя из фиг. 1, измерение в режиме распознавания сигналов железнодорожного транспортного средства на отрезке участка железной дороги железнодорожной сети для определенной координаты места железнодорожного транспортного средства на участке железной дороги, рабочей информации места относительно географического окружения и рабочей информации состояния сигналов относительно управления сигналами железнодорожного движения с помощью устройства распознавания сигналов в железнодорожном транспортном средстве;
фиг. 3 - принципиальная схема устройства распознавания сигналов и состояний сигналов установки управления сигналами на основании измеренной опорной информации в опорном режиме, согласно фиг. 1, и измеренной рабочей информации в режиме распознавания сигналов, согласно фиг. 2.
На фиг. 1 показано измерение в опорном режиме относящейся к месту опорной информации в железнодорожном движении BVK относительно географического окружения и управления сигналами железнодорожного движения на изображенном частично участке BST железной дороги железнодорожной сети BNE с помощью устройства SVE распознавания сигналов в движущемся по участку BST железнодорожном транспортном средстве BZF и относительно определенного географического положения железнодорожного транспортного средства BFZ на участке BST железной дороги.
Согласно этому примеру выполнения, участок BST железнодорожной сети BNE рельсового пути SST рельсовой сети SNE, на которой движется рельсовое транспортное средство SFZ для измерения относящейся к месту опорной информации в рельсовом движении SVK. Вместо показанного рельсового движения SVK с движущимся на рельсовом участка SST рельсовой сети SNE рельсового транспортного средства SFZ возможна на основании указанного выше также любая другая удлиненная система железнодорожного движения в качестве другого примера выполнения изобретения. Так, например, это может быть система дороги на магнитной подушке (Transrapid, Maglev и т.д.) с соответствующей сравнимой инфраструктурой, состоящей из железнодорожной сети, участка железной дороги и железнодорожного транспортного средства.
В показанной на фиг. 1 системе рельсового движения в моторном вагоне TRW рельсового транспортного средства SFZ с пультом управления TFS и интегрированным индикаторным устройство AZE, в котором находится рабочее место машиниста FZF транспортного средства, установлено устройство SEV распознавания сигналов для измерения относящейся к месту опорной информации. Для этого устройство SEV распознавания сигналов содержит измерительное приспособление EFE, которое предпочтительно выполнено в виде прибора BAZG для записи изображений, например, в виде обычной видеокамеры, инфракрасной камеры и т.д.
С помощью этого измерительного приспособления EFE, соответственно прибора BAZG для записи изображений, измеряются, например, во время особой поездки рельсового транспортного средства SFZ по рельсовому участку SST рельсовой сети SNE относящаяся к месту опорная информация в виде опорной информации ROI места (см. также фиг. 3) относительно географического окружения и в виде опорной информации RSZI состояния сигналов (см. также фиг. 3) относительно управления сигналами рельсового движения SVK на изображенном отрезке рельсового участка SST с помощью установки SSA управления сигналами относительно пересекающейся с рельсовым участком SST автомобильной дороги (железнодорожный переезд со шлагбаумом на фиг. 1). С помощью измерения опорной информации состояния сигналов по существу измеряется (автоматически) состояние SZ сигнала с характерным сигналом SI установки SSA управления сигналами.
Как показано на фиг. 1, сигнал SI установки SSA управления сигналами не является изменяющимся во времени сигналом, например, мигающим сигналом, используемым для динамического управления сигналами железнодорожного движения BVK, SVK, а сигналом, с помощью которого осуществляется статическое управление железнодорожным движением BVK, SVK. Однако, если подлежат распознаванию сигналы с мигающими частями, то способ распознавания сигналов, согласно изобретению, для определенного места железной дороги следует, согласно п. 1 формулы изобретения, повторять предпочтительно с короткими интервалами времени.
Однако относящаяся к месту опорная информация может создаваться другим образом, а не с помощью специальных поездок. Так, например, с помощью соответствующего подходящего, зависящего от рельсового транспортного средства способа записи или на основании целенаправленного измерения географического окружения и управления сигналами персоналом железнодорожного транспортного средства, соответственно рельсового транспортного средства, на участке железной дороги, соответственно рельсовом участке, в железнодорожной сети, соответственно рельсовой сети (измерение вручную).
Измерение опорной информации места и опорной информации состояния сигналов установки SSA управления сигналами осуществляется для или относительно определенного географического положения рельсового транспортного средства SFZ на рельсовом участке SST, т.е. относительно места, посредством соответствующего включения измерительного приспособления EFE, соответственно, прибора BAZG записи изображений, как только рельсовое транспортное средство SFZ по существу достигнет определенного и заданного положения. Как осуществляется это включение, поясняется в связи с описанием фиг. 3.
Поэтому в случае прибора BAZG записи изображений после процесса разрешения географического окружения и установки SSA управления сигналами делается съемка по меньшей мере одного изображения и за счет этого, наряду с географической информацией места измеряется состояние SZ сигнала с характеристическим сигналом SI установки SSA управления сигналами, например, в виде нескольких изображений.
Это относящееся к месту, предпочтительно в виде изображения измерение может осуществляться для различных состояний SZ сигнала установки SSA управления сигналами (например, во время нескольких специальных поездок), за счет чего увеличивается количество опорной информации состояния сигналов для распознавания сигналов, и за счет этого улучшается при некоторых обстоятельствах вероятность распознавания.
В случае прибора BAZG записи изображений, когда делается съемка по меньшей мере одного изображения окружающего ландшафта или установки управления сигналами, прибор BAZD записи изображений предпочтительно выполнен с возможностью поворота, с целью компенсации угла прибора съемки относительно установки SSA управления сигналами.
Кроме того, независимо от того, находится ли в моторном вагоне TRW рельсового транспортного средства SFZ измерительное приспособление EFE или прибор BAZG записи изображений, предпочтительно, когда используется больше одного измерительного приспособления EFE или прибора BAZG записи изображений. За счет этого, например, когда измерительное приспособление EFE или прибор BAZG записи изображений выходит из строя вследствие повреждения или загрязнения, может быть в любом случае продолжено измерение опорной информации. Дополнительно к этому возможно, что при параллельной работе, например, двух измерительных приспособлений EFE, соответственно двух приборов BAZG записи изображений, повышается достоверность измеренной опорной информации.
Другие подробности устройства SEV распознавания сигналов с измерительным приспособлением EFE или прибором BAZG записи изображений, например, как они детально выполнены относительно дополнительных возможностей дальнейшей обработки, снова поясняются в связи с описанием фиг. 3.
Указанным образом можно измерять все прохождения участков BST, соответственно, рельсовых участков в железнодорожной сети BNE, соответственно рельсовой сети SNE, по меньшей мере частично и по существу относительно географического положения и управления сигналами движения на железнодорожном участке BST, соответственно на рельсовом участке SST, с привязкой к месту в виде опорной информации места и опорной информации состояния сигналов. За счет этого генерируется огромный объем опорной информации, который образует основу для распознавания сигналов в железнодорожном движении BVK железнодорожной сети BNE.
Этот объем информации может быть расширен любой вторичной информацией, с целью оптимизации распознавания сигналов в регулярном режиме движения отдельного железнодорожного транспортного средства. Этот специальный режим движения называется в дальнейшем режимом распознавания сигналов.
В связи с описанием фиг. 3 указывается и поясняется предпочтительная, рациональная и целесообразная вторичная информация. Однако перед этим приводится описание и пояснение режима распознавания сигналов со ссылками на фиг. 2.
На фиг. 2 показано выполняемое в соответствии с режимом распознавания сигналов измерение относящейся к месту рабочей информации в железнодорожном движении BVK относительно географического окружения и управления сигналами железнодорожного движения на том же участке BST железнодорожной сети BNE, как и на фиг. 1, с помощью устройства SVE распознавания сигналов в проезжающем по участку BST железнодорожном транспортном средстве BFZ.
Участок BST железнодорожной сети BNE снова, как и на фиг. 1, является рельсовым участком SST рельсовой сети SNE, на котором рельсовое транспортное средство SFZ находится в пути для измерения относящейся к месту рабочей информации в рельсовом движении SVK. Вместо изображенного рельсового движения SVK с движущимся по рельсовому участку SST рельсовой сети SNE рельсовым транспортным средством SFZ может быть, как указывалось выше, также любая другая длинная система железнодорожного движения в качестве другого примера выполнения изобретения. Так, например, это может быть система дороги на магнитной подушке (Transrapid, Maglev и т.д.) с соответствующей сравнимой инфраструктурой, состоящей из железнодорожной сети, участка железной дороги и железнодорожного транспортного средства.
В показанной на фиг. 2 системе рельсового движения в моторном вагоне TRW рельсового транспортного средства SFZ с пультом управления TFS и интегрированным индикаторным устройством AZE, в котором находится рабочее место машиниста FZF транспортного средства, установлено устройство SEV распознавания сигналов для измерения относящейся к месту рабочей информации. Для этого устройство SEV распознавания сигналов содержит снова измерительное приспособление EFE, которое предпочтительно выполнено в виде прибора BAZG для записи изображений, например, в виде обычной видеокамеры, инфракрасной камеры и т.д.
С помощью этого измерительного приспособления EFE, соответственно прибора BAZG для записи изображений, измеряются, например, во время регулярной рабочей поездки рельсового транспортного средства SFZ по рельсовому участку SST рельсовой сети SNE (например, в соответствии с расписанием движения) относящаяся к месту рабочая информация в виде рабочей информации BOI места (см. также фиг. 3) относительно географического окружения и в виде рабочей информации состояния сигналов BSZI (см. также фиг. 3) относительно управления сигналами рельсового движения SVK на изображенном отрезке рельсового участка SST с помощью установки SSA управления сигналами относительно пересекающейся с рельсовым участком SST автомобильной дороги (железнодорожный переезд со шлагбаумом на фиг. 2). С помощью измерения рабочей информации состояния сигналов по существу измеряется (автоматически) состояние SZ сигнала с характеристическим сигналом SI установки SSA управления сигналами.
Как показано на фиг. 2, сигнал SI установки SSA управления сигналами не является изменяющимся во времени сигналом, например, мигающим сигналом, используемым для динамического управления сигналами железнодорожного движения BVK, SVK, а сигналом, с помощью которого осуществляется статическое управление железнодорожным движением BVK, SVK. Однако, если подлежат распознаванию сигналы с мигающими частями, то способ распознавания сигналов, согласно изобретению, для определенного места железной дороги следует, согласно п. 1 формулы изобретения, повторять предпочтительно с короткими интервалами времени.
Измерение рабочей информации места и рабочей информации состояния сигналов установки SSA управления сигналами осуществляется относительно определенной координаты места рельсового транспортного средства SFZ на рельсовом участке SST с помощью соответствующего включения измерительного приспособления EFE, соответственно, прибора BAZG записи изображений, как только рельсовое транспортное средство SFZ по существу достигнет определенного и заданного положения. Как осуществляется это включение, поясняется в связи с описанием фиг. 3.
Поэтому в случае прибора BAZG записи изображений после процесса разрешения географического окружения и установки SSA управления сигналами делается съемка по меньшей мере одного изображения и за счет этого, наряду с географической информацией места, измеряется состояние SZ сигнала с характеристическим сигналом SI установки SSA управления сигналами, например, в виде нескольких изображений. При этом прибор BAZG записи изображений снова предпочтительно выполнен с возможностью поворота, с целью компенсации угла прибора съемки относительно установки SSA управления сигналами.
Кроме того, также в режиме распознавания сигналов, как перед этим в опорном режиме, независимо от того, находится ли в моторном вагоне TRW рельсового транспортного средства SFZ измерительное приспособление EFE или прибор BAZG записи изображений, предпочтительно, когда используется больше одного измерительного приспособления EFE или прибора BAZG записи изображений. За счет этого можно, например, когда измерительное приспособление EFE или прибор BAZG записи изображений выходит из строя вследствие повреждения или загрязнения, в любом случае продолжать измерение рабочей информации. Дополнительно к этому возможно, что при параллельной работе, например, двух измерительных приспособлений EFE, соответственно двух приборов BAZG записи изображений, повышается достоверность измеренной рабочей информации.
Другие подробности устройства SEV распознавания сигналов с измерительное приспособление EFE или прибором BAZG записи изображений, например, как они детально выполнены относительно дополнительных возможностей дальнейшей обработки, снова поясняются в связи с описанием фиг. 3.
На фиг. 3 показана принципиальная схема устройства SVE распознавания сигналов для распознавания измеренных с помощью измерения опорной информации в опорном режиме, согласно фиг. 1, и с помощью измерения рабочей информации в режиме распознавания сигналов, согласно фиг. 2, сигналов SI и состояний SZ сигналов установки SSA управления сигналами.
При этом исходную точку для этого распознавания сигналов, согласно выкладкам к фиг. 1 и 2, составляет измерительное приспособление EFE, соответственно прибор BAZG записи изображений, которые измеряют опорную информацию ROI места и рабочую информацию BOI места относительно географического окружения, а также опорную информацию RSZI и рабочую информацию BSZI состояния сигналов относительно установки SSA управления сигналами.
Как указывалось выше при описании фиг. 1 и 2, измерение информации в опорном режиме может осуществляться предпочтительно автоматически, но также и вручную, в то время как измерение информации в режиме распознавания сигналов предпочтительно выполняется всегда автоматически. В то время как при измерении вручную измерительное приспособление EFE, соответственно прибор BAZG записи изображений, включаются вручную, то при автоматическом измерении требуется соответствующее внешнее воздействие.
Для этого устройство SVE распознавания сигналов имеет, наряду с измерительным приспособлением EFE, соответственно прибором BAZG записи изображений, еще определяющее положение приспособление, которое определяет географическое положение железнодорожного транспортного средства, соответственно рельсового транспортного средства, на проезжаемом участке железной дороги, соответственно рельсовом участке, и определяет проезжаемый участок железной дороги, соответственно рельсовый участок. Способ определения положения имеет второстепенное значение для пояснения примера выполнения изобретения и может осуществляться известным обычным образом. Так, например, на основе системы GPS или технологии GPS.
Таким образом, с помощью приспособления РВЕ определения положения можно, в частности в режиме распознавания сигналов, для любого места на участке железной дороги, на котором может двигаться железнодорожное транспортное средство, определять координату ВОК места железнодорожной сети, соответственно координату SOK рельсовой сети. С помощью этой координаты ВОК, соответственно координаты SOK, обеспечивается возможность достаточного задания положения транспортного средства.
Относительно упомянутого выше воздействия для измерительного приспособления EFE, соответственно прибора BAZG записи изображений, с помощью приспособления РВЕ определения положения генерируется информация BSI участка железной дороги или информация SSI рельсового участка, которая подается в измерительное приспособление EFE, соответственно прибор BAZG записи изображений, для указанной цели. Измерительное приспособление EFE, BAZG имеет для этого управляющий интерфейс STSS. С помощью информации BSI участка железной дороги, соответственно информации SSI рельсового участка, обеспечивается возможность управления измерительным приспособлением EFE, BSZG так, что оно измеряет
(i) рабочую информацию BOI места относительно географического окружения и рабочую информацию BSZI состояния сигналов относительно выполненного с помощью установки управления сигналами управления сигналами железнодорожного движения в зависимости от информации BSI, SSI участка железной дороги для сообщенной в ней координаты ВОК места железной дороги, соответственно, сообщенной в ней координаты SOK рельсового участка (при автоматическом измерении в режиме распознавания сигналов; опция I), или
ii) рабочую информацию BOI места относительно географического окружения и рабочую информацию BSZI состояния сигналов относительно выполненного с помощью установки управления сигналами управления сигналами железнодорожного движения в зависимости от информации BSI, SSI участка железной дороги для сообщенной в ней координаты ВОК места железной дороги, соответственно, сообщенной в ней координаты SOK рельсового участка, и опорную информацию места ROI относительно географического окружения и рабочую информацию BSZI состояния сигналов относительно выполненного с помощью установки управления сигналами управления сигналами железнодорожного движения в зависимости от информации BSI, SSI участка железной дороги для сообщенного в ней географического положения железнодорожного транспортного средства BFZ, SFZ (при автоматическом измерении в режиме распознавания сигналов и в опорном режиме; опция I и опция II).
Измерительное приспособление EFE, BAZG предпочтительно выполнено так, что для оценки географического окружения и управления сигналами железнодорожного движения в контексте измерения учитывается точное положение и/или угол измерения географического окружения и управления сигналами железнодорожного движения на участке железной дороги относительно железнодорожного транспортного средства.
Кроме того, в измерительном приспособлении EFE, BAZG содержится обрабатывающий компонент ВКО, с помощью которого оценивается географическое окружение и управление сигналами железнодорожного движения, в частности установка управления сигналами, в контексте измерения и, в частности, снабжаются дополнительной маркировкой. Обрабатывающий компонент ВКО имеет для этого, например, не изображенный явно на фиг. 3 интерфейс пользователя, с помощью которого измеренная опорная информация, например снятые изображения, оцениваются экспертом, например, машинистом транспортного средства, и точное положение установки управления сигналами, а также ее состояние маркируется в снятом изображении.
В результате оцененного в контексте измерения и, в частности, снабженного дополнительной маркировкой географического окружения и управления сигналами железнодорожного движения, в частности установки управления сигналами, обрабатывающий компонент ВКО поставляет соответствующую привязанную к месту контекстную и индикаторную информацию KHI.
Эта привязанная к месту контекстная и индикаторная информация KHI образует, вместе с опорной информацией ROI места и опорной информацией состояния сигналов, а также, возможно, полезной для распознавания сигналов и поставляемой измерительным приспособлением EFE, BAZG относящейся к месту и контексту измерения метаинформацией MI, относящиеся к месту опорные данные RDA, которые для распознавания сигналов запоминаются в памяти SPE.
Опорные данные RDA предпочтительно создаются статически в специальных поездках или на основе целенаправленного измерения географического окружения и управления сигналов персоналом транспортного средства на участке железнодорожной дороги в железнодорожной сети и вносятся в память. Статическое измерение вносимых в память опорных данных RDA может быть предпочтительно оптимировано тем, что эти статические данные динамически дополняются с помощью соответствующей измеренной рабочей информации BOI места и соответствующей измеренной рабочей информации BSZI состояния сигналов, и заносятся в память.
В качестве места запоминания опорных данных RDA запоминающее приспособления SPE либо согласовано снаружи (опция А) с устройством распознавания сигналов SEV, например, в виде банка данных памяти в моторном вагоне, с измерительным приспособлением EFE, BAZG, соответственно, выполнено с возможностью соединения с ним (опция В), или в качестве компонента измерительного приспособления EFE соединено с измерительным приспособлением EFE, BAZG.
Метаинформация MI поставляется, предпочтительно не обязательно, измерительным приспособлением EFE, с целью лучшего и более надежного распознавания состояния сигналов и подаваемых сигналов с помощью установки управления сигналами. В качестве дополнительной метаинформации может использоваться, например, тип установки управления сигналами и для соответствующего типа установки управления сигналами калибрированные изображения (например, из специальной лаборатории изображений) различных состояний сигналов соответствующей установки управления сигналами. Метаинформация MI является в целом информацией, которая, в соответствии со значением слова, относится к признакам или свойствам измеренной информации и полученной в контексте измерения с помощью оценки информации, и она указывает, каким образом осуществляется управление сигналами с помощью генерируемой калибровочной информации, например, с помощью установки SSA управления сигналами, относительно типа сигнальной установки и состояния сигнальной установки.
В качестве примера выполнения изобретения, прибор BAZG записи изображений в качестве предпочтительного выполнения измерительного приспособления EFE, BAZG, предпочтительно содержит для улучшения измерения опорной информации ROI места и рабочей информации BOI места относительно географического окружения, а также опорной информации RSZI состояния сигналов и рабочей информации ВSZI состояния сигналов относительно установки SSA управления сигналами, еще три других компонента, а именно, компонент КОК коррекции, компонент BVK изменения фокусного расстояния и компонент BLK освещения.
С помощью компонента КОК коррекции, при оценке изображений используются данные погоды и освещенности.
С помощью компонента BVK изменения фокусного расстояния выбирается в зависимости от расстояния до сигнала правильный угол съемки, с целью оптимальной поддержки многократной оценки сигнала. Таким образом, может учитываться не только расстояние до сигнала, но также различные ситуации съемки. Например, в этом случае можно выполнять съемку как на свободном участке (необходима съемка изображения с дальнего расстояния, с целью обеспечения своевременной реакции с учетом скорости), так и в зоне вокзалов (необходимы изображения с большой шириной).
С помощью компонента BLK освещения, который выполнен, например, в виде прожектора, который работает внутри или вне воспринимаемого человеком спектра, улучшается качество изображений, получаемых с помощью прибора BAZG записи изображений, ночью или при плохой погоде.
После приведенного выше в описании устройства SEV распознавания сигналов, согласно фиг. 3, с учетом выкладок к фиг. 2 и 3, подробного описания его принципа действия относительно режима распознавания сигналов и относительно опорного режима, ниже приводится подробное описание, как происходит распознавание сигналов в режиме распознавания сигналов устройства SEV распознавания сигналов на основании измеренной с помощью измерительного приспособления EFE, BAZG рабочей информации.
Измеренные с помощью измерительного приспособления EFE, BAZG на основе определяемых с помощью приспособления РВЕ определения положения рабочих координат ВОК, SOK места, - предпочтительно в виде нескольких снятых с короткими интервалами времени изображений географического окружения и управления сигналами железнодорожного движения, в частности, установки управления сигналами, - рабочая информация BOI места и рабочая информация ВSZI состояния сигналов вместе с рабочей координатой BOK, SOK места подаются в приспособление PAUE компенсации положения. Приспособление PAUE компенсации положения, которое для распознавания сигналов включено перед приспособлением РАЕ сравнения положения, в котором для распознавания сигналов выполняется сравнение информации между рабочей информацией и относящейся к месту опорной информацией, предпочтительно изменяет измеренную для определенной координаты ВОК, SOK с помощью измерительного приспособления EFE, BAZG рабочую информацию BOI места для компенсации неточности измерения опорной информации ROI места и рабочей информации BOI места для сравнения информации. При этом осуществляемое в приспособлении РАUЕ компенсации положения изменение выполняется с помощью технических мер искажения.
Относительно поставляемых прибором BAZG записи изображений это означает, что возможно необходимые искажения изображений определяются, если имеющиеся изображения банка данных изображений не сняты точно с того места, как снятые при специальной поездке изображения. Таким образом, при необходимости вычисляется компенсация снятых изображений на основании информации положения, т.е. изображения, возможно, немного искажаются.
Измененная рабочая информация BOI места и рабочая информация ВSZI состояния сигналов подаются затем для уже упомянутого сравнения информации в приспособление РАЕ сравнения положения. В этом приспособлении РАЕ сравнения положения обе рабочие информации, а именно, предпочтительно измененная рабочая информация BOI места и рабочая информация ВSZI состояния сигналов, сравнивается с находящимися в памяти SPE относящимися к месту опорными данными RDA. Это сравнение осуществляется так, что рабочая информация BOI места сравнивается с опорной информацией ROI места и рабочая информация ВSZI состояния сигналов сравнивается с опорной информацией RSZI состояния сигналов относительно рабочей информации BOI места и соответствующей опорной информации ROI места на основании находящихся в памяти опорных данных RDA так, что измеренная рабочая информация ВSZI состояния сигналов для распознавания сигналов, при котором сигнал SI и/или состояние SZ сигнала для управления железнодорожным движением на участке железной дороги подлежит распознаванию для определенных координат ВОК, SOK, считается найденной, когда рабочая информация ВSZI состояния сигналов относительно рабочей информации BOI места и соответствующей опорной информации ROI места соответствует содержащейся в опорных данных RDA опорной информации RSZI состояния сигналов с учетом содержащейся в опорных данных RDA контекстной и индикаторной информации KHI, соответственно, контекстной и индикаторной информации KHI и метаинформации MI.
Относительно изображений, поставляемых прибором BAZG записи изображений, это означает, что снятые во время регулярной рабочей поездки изображения сравниваются с оцененными, например, экспертами, соответственно машинистом транспортного средства, и маркированными изображениями, а также возможно другими метаданными и калиброванными изображениями, с целью обеспечения возможности распознавания сигнала и/или состояния сигнала. При этом применяется маркировка, с целью возможно точного задания релевантного участка изображения, а также различения между релевантными и не релевантными сигналами (например, побочного участка железной дороги). Для сравнения цвета возможно применяются заметные элементы изображения в окружении сигнала, такие как белые щиты.
Затем распознанный сигнал SI и/или распознанное состояние SZ сигнала передается в управляющее приспособление STE устройства SEV распознавания сигналов. Управляющее приспособление STE выполнено так, что оно из распознанного с помощью приспособления РАЕ сравнения положения сигнала SI и/или состояния SZ сигнала, а также с учетом хранящейся в банке DAB данных, который образует, например, с запоминающим приспособлением SPE конструктивный и функциональный блок, информацией BSBFI участка железной дороги и железнодорожного транспортного средства, предпочтительно в случае рельсового движения, с информацией SSSFI рельсового участка и рельсового транспортного средства, которые относятся к железнодорожному, соответственно, рельсовому регулировочному механизму, а также к атрибутам и свойствам железнодорожного транспортного средства, в частности, к атрибутам и свойствам рельсового транспортного средства, вычисляется, соответственно, выводится по меньшей мере одна акция FAK движения.
Кроме того, управляющее приспособление STE выполнено так, что вычисленная или выведенная акция FAK движения указывается машинисту FZF транспортного средства на пульте TFS машиниста железнодорожного транспортного средства BFZ, SFZ в качестве рекомендации на индикаторном приспособлении AZE, используется в качестве подтверждения команды движения, или передается в автоматическую систему AFS движения железнодорожного транспортного средства BFZ, SFZ для автоматического выполнения акции FAK движения.
Используемое, как указано и пояснено выше, для опорного и рабочего распознавания сигналов в железнодорожном транспортном средстве BFZ, SFZ и применяемое для распознавания сигналов устройство SEV распознавания сигналов состоит по существу из аппаратных средств и компонентов программного обеспечения и может быть интегрировано в виде отдельно изготавливаемого и продаваемого блока в существующую инфраструктуру железнодорожного транспортного средства BFZ, SFZ.
В этом состоянии устройство SEV распознавания сигналов может быть как соединено с внешним обрабатывающим центром (AWS), так и образовывать с внешним обрабатывающим центром AWS такой функциональный блок, что статически созданные опорные данные RDA или статически созданные опорные данные RDA и созданные соответствующие динамически дополненные рабочие данные BOI, ВSZI сравниваются с соответствующими данными других железнодорожных транспортных средств общего флота железнодорожных транспортных средств и распределяются.
Внешний обрабатывающий центр AWS предпочтительно соединен с помощью мобильной радиосвязи с устройством SEV распознавания сигналов в железнодорожном транспортном средстве BFZ, SFZ.
Кроме того, возможно также, что устройство SEV распознавания сигналов выполнено и работает в качестве виртуальной машины в смысле ʺSoftware Defined Signal Recognition of Rail Traffic Systemʺ (определяемое программным обеспечением распознавание сигналов системы рельсового движения).
Реферат
Изобретение относится к железнодорожной автоматике для распознавания путевых сигналов. В способе, когда транспортные средства (BFZ, SFZ) движутся на участках (BST, SST) в железнодорожной сети (BNE, SNE), на основе а) запоминаемой в качестве опорных данных (RDA), измеренной вдоль участка (BST, SST) в железнодорожной сети относительно географического окружения и управления сигналами железнодорожного движения опорной информации в виде опорной информации (ROI) и опорной информации (RSZI) состояния сигналов места, полученной в контексте измерения контекстной и индикаторной информации (KHI) и дополнительной метаинформации (MI), а также (b) сравнения измеренной в режиме распознавания сигналов на основании данных (BOK, SOK) положения рабочей информации (BOI) места и рабочей информации (BSZI) состояния сигналов c находящимися в памяти опорными данными (RDA) распознавать сигнал (SI) и состояние (SZ) сигнала для управления железнодорожным движением (BVK, SVK) на железнодорожном участке (BST, SST), за счет оценки релевантности и содержания информации обеспечивается тогда, когда при сравнении найдена измеренная рабочая информация (BSZI) состояния сигналов для распознавания сигналов, которая относительно информации (BOI) и соответствующей ей опорной информации (ROI) места соответствует содержащейся в опорных данных (RDA) опорной информации (RSZI) состояния сигналов с учетом содержащейся в опорных данных контекстной и индикаторной информации (KHI), и имеющейся метаинформации (MI). Достигается повышение надежности автоматического распознавания сигналов на железнодорожном транспорте. 3 н. и 27 з.п. ф-лы, 3 ил.
Комментарии