Радиотехнический датчик прохода колёс с определением направления движения подвижного состава - RU169465U1
Код документа: RU169465U1
Чертежи
Описание
Настоящая полезная модель относится к железнодорожному транспорту, а именно к системам автоматики и телемеханики, использующим сигналы контроля прохождения колесных пар подвижных железнодорожных единиц (вагонов) через точку с известными координатами.
В структуру железнодорожных систем автоматики и телемеханики, контролирующих подвижной состав, входят устройства (датчики), фиксирующие момент прохождения колеса вагона через точку с известными координатами на рельсовой нити. В известной литературе, например [1], эти устройства называются «датчик электронной системы счета осей» и «датчики прохода колес». На железных дорогах России применяются несколько магнитных датчиков прохода колес (ДПК), отличающихся конструктивными особенностями, но одинакового принципа действия.
Конструктивно магнитные ДПК состоят из постоянного магнита (сердечника) и обмотки из медного провода. Датчики крепятся струбциной внутри колеи на подошве рельса.
Магнитный ДПК работает следующим образом: при подходе гребня колеса к датчику магнитный поток возрастает и в обмотке индуцируется электродвижущая сила (ЭДС), создающая в нагрузке импульс напряжения колоколообразной формы положительной полярности. Когда гребень колеса оказывается над датчиком, ЭДС в обмотке меняет полярность и при дальнейшем движении колеса формируется отрицательный импульс. Амплитуда и длительность сигнала, сформированного ДПК, зависит от скорости изменения магнитного потока, т.е. от скорости поступательного движения колеса вагона.
Достоинства магнитного датчика прохода колес:
- простота конструкции;
- невысокая стоимость;
- высокая надежность работы.
Однако существующие недостатки магнитных ДПК ограничивают их применение [2].
К таким недостаткам магнитного датчика прохода колес, относятся:
1) необходимость специального кабеля для передачи выходного сигнала датчика с целью использования в системах железнодорожной автоматики и телемеханики;
2) неудовлетворительные, с точки зрения развития современных технологий, энергетические и массогабаритные показатели:
- большая (около 80 Вт) мощность электрической энергии, потребляемая датчиком;
- малая мощность (около 0,0013 Вт) генерируемого датчиком сигнала, что ограничивает его передачу на расстояние более 100 м;
- высокое (около 1 кг) содержание медного провода;
- относительно большая масса (около 5 кг);
3) невозможность работы датчика при скоростях движения менее 5 км/ч;
4) существенная чувствительность к помехам, возникающим за счет воздействия магнитного поля, создаваемого тяговым током;
5) размагничивание магнита с течением времени эксплуатации;
6) невозможность автоматической координатной привязки места установки ДПК.
Также известны электронные ДПК [3, 4], принцип работы которых заключается в регистрации момента срыва колебаний генератора при внесении приближающимся колесом затухания в колебательный контур генератора.
Недостатками этих датчиков являются:
1) сложность температурной компенсации изменений параметров катушек колебательных контуров, что необходимо для сохранения точности фиксации прохода колеса над заданной точкой рельсового пути;
2) необходимость специального кабеля для передачи выходного сигнала датчика с целью использования в системах железнодорожной автоматики и телемеханики;
3) малая мощность сигнала ДПК, ограничивающая его передачу на расстояние более 100 м;
4) несовместимость с микропроцессорной техникой обработки сигналов;
5) невозможность автоматической координатной привязки места установки датчика.
От указанных недостатков свободен заявленный ДПК. Работа заявленного ДПК основана на определении момента времени и направления прохода колеса вагона над датчиком по анализу последовательного изменения амплитуд колебаний измерительных генераторов путем их синхронного детектирования на двух синхронных детекторах (совместно с колебаниями одного опорного генератора) с последующим формированием (в микропроцессоре) информационного сигнала о факте и скорости прохода колеса над датчиком с известными координатами, кодированием информационного сигнала и передачей его по радиоканалу потребителям в системы:
а) централизованной автоблокировки;
6) интервального регулирования движения поездов;
в) автоматизированного контроля подвижного состава на ходу поезда.
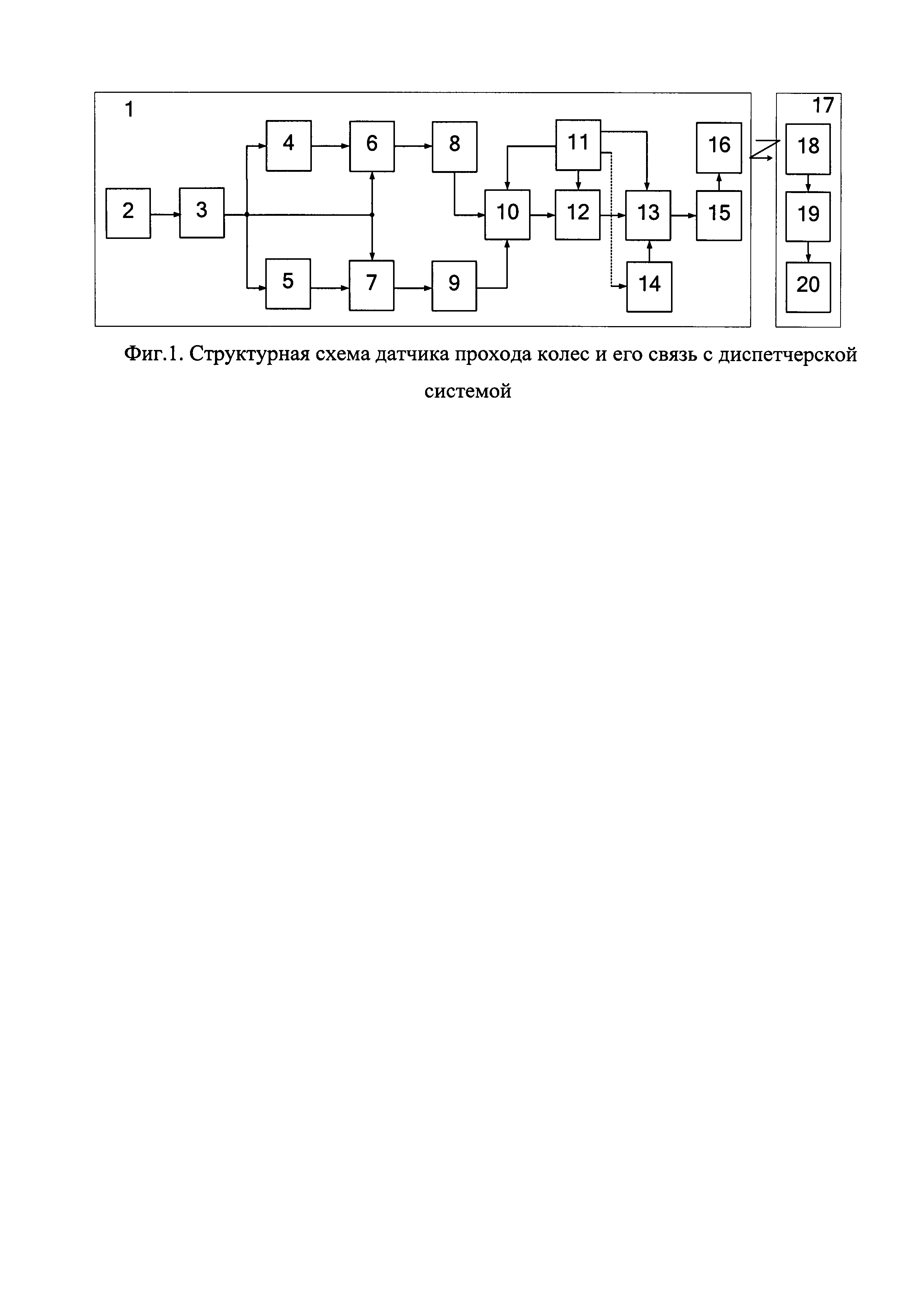
Структурно, заявленный ДПК 1 состоит (фиг. 1) из прецизионного кварцевого автогенератора гармонических опорных колебаний 2, амплитудного ограничителя 3, двух измерительных генераторов с внешним возбуждением 4 и 5, двух синхронных детекторов (СД) 6 и 7, двух формирователей импульсов 8 и 9, счетчика импульсов 10, приемника глобальной спутниковой навигационной системы (ГЛОНАСС) 11, аналогово-цифрового преобразователя (АЦП) 12, специализированного микропроцессора обработки сигналов датчика (СМОСД) 13, программируемого постоянного запоминающего устройства (ППЗУ) 14, передатчика 15, передающей антенны 16.
Конструктивно элементы схем электронных устройств 2÷15 (фиг. 1), за исключением катушек индуктивности L4 и L5 колебательных контуров измерительных генераторов 4 и 5, заключены, для защиты от электромагнитных помех, в ферромагнитный экран.
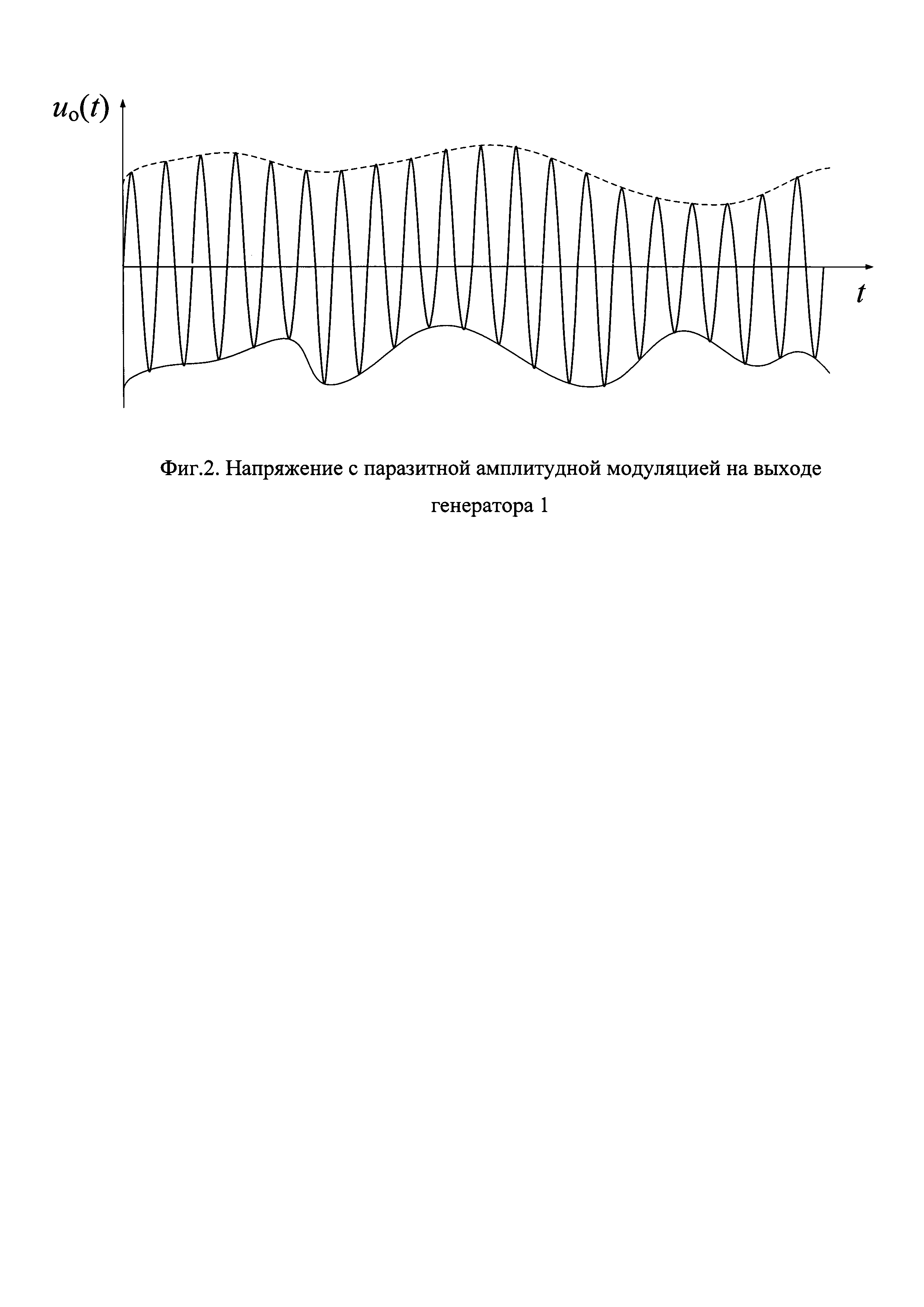
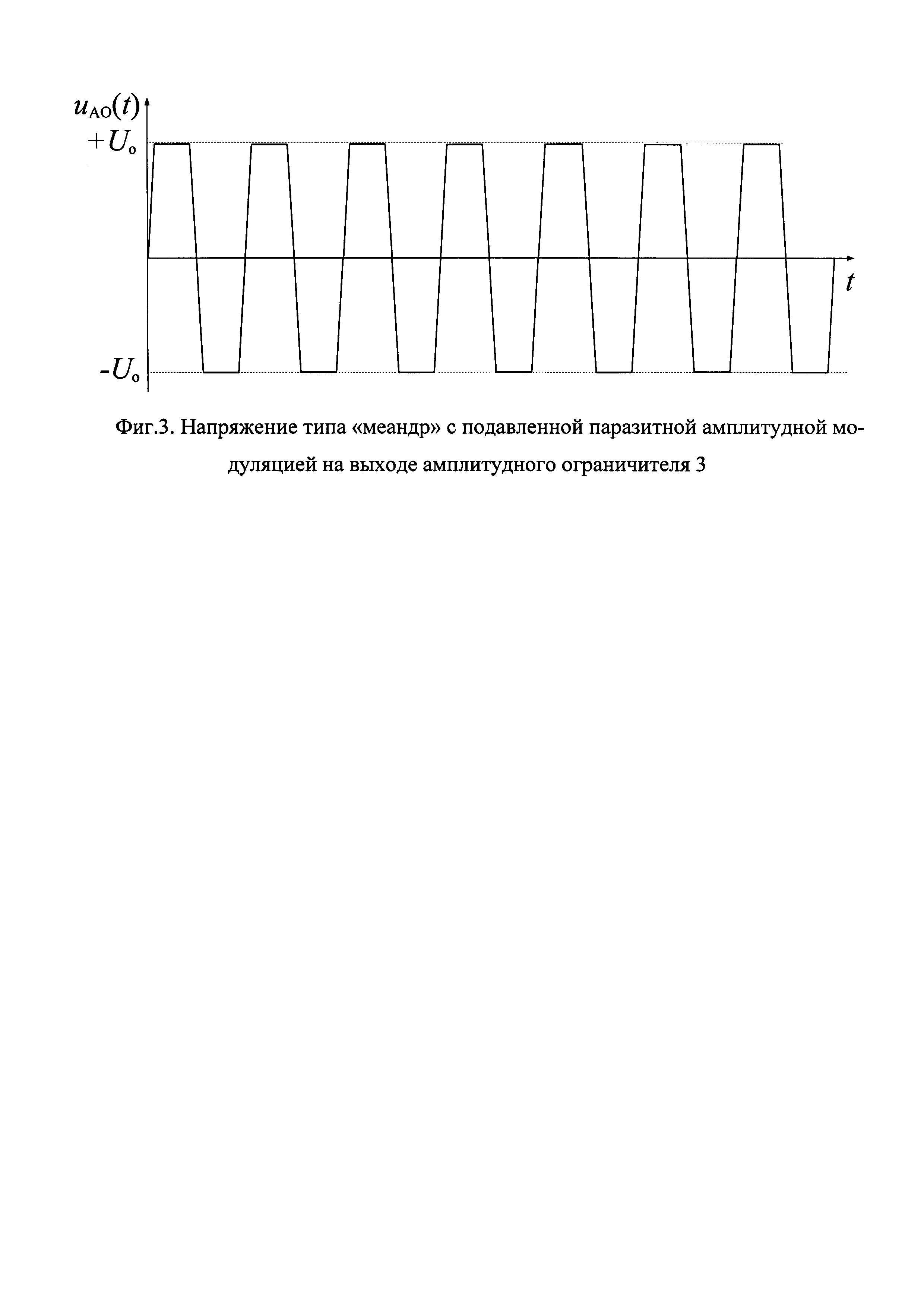
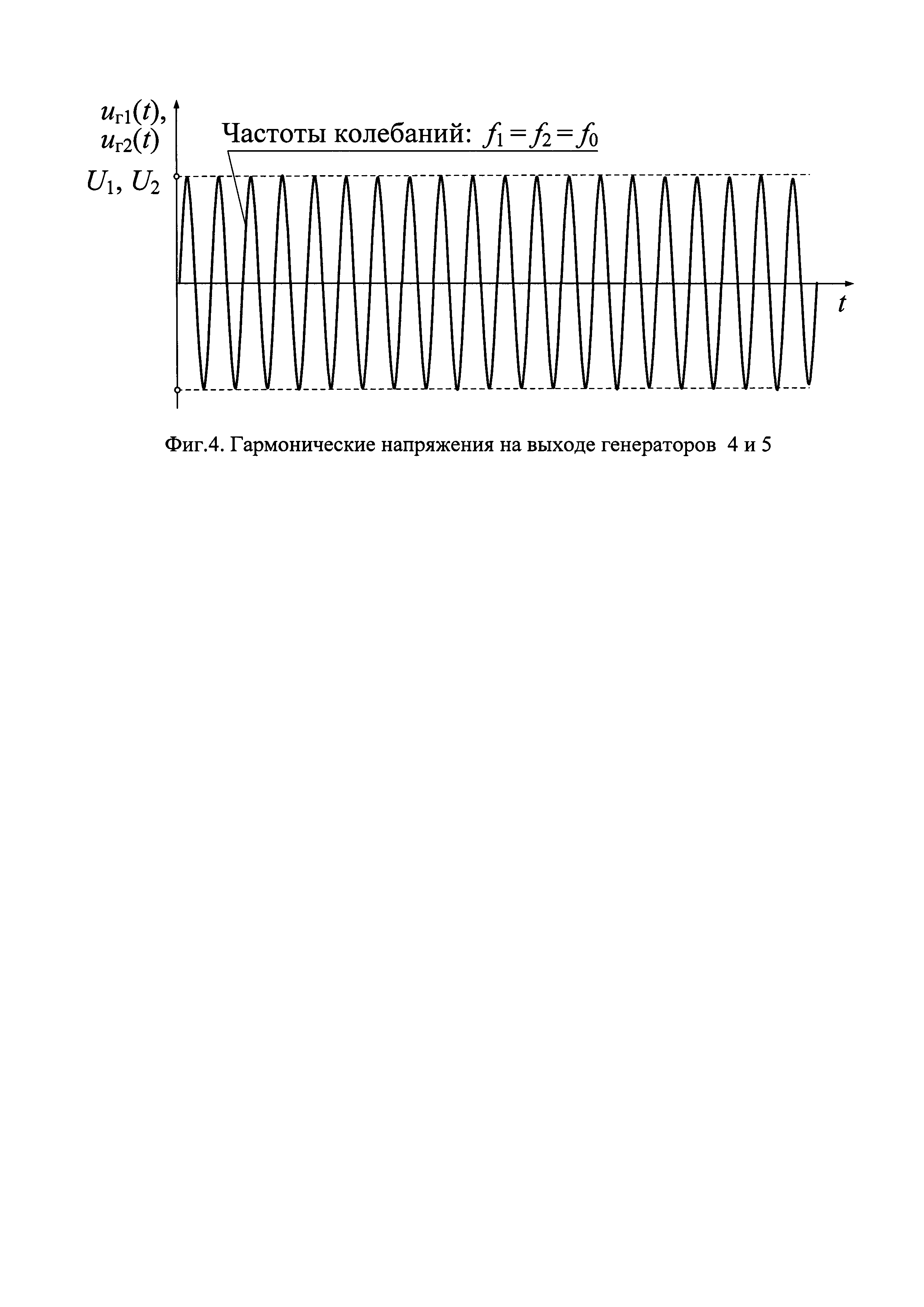
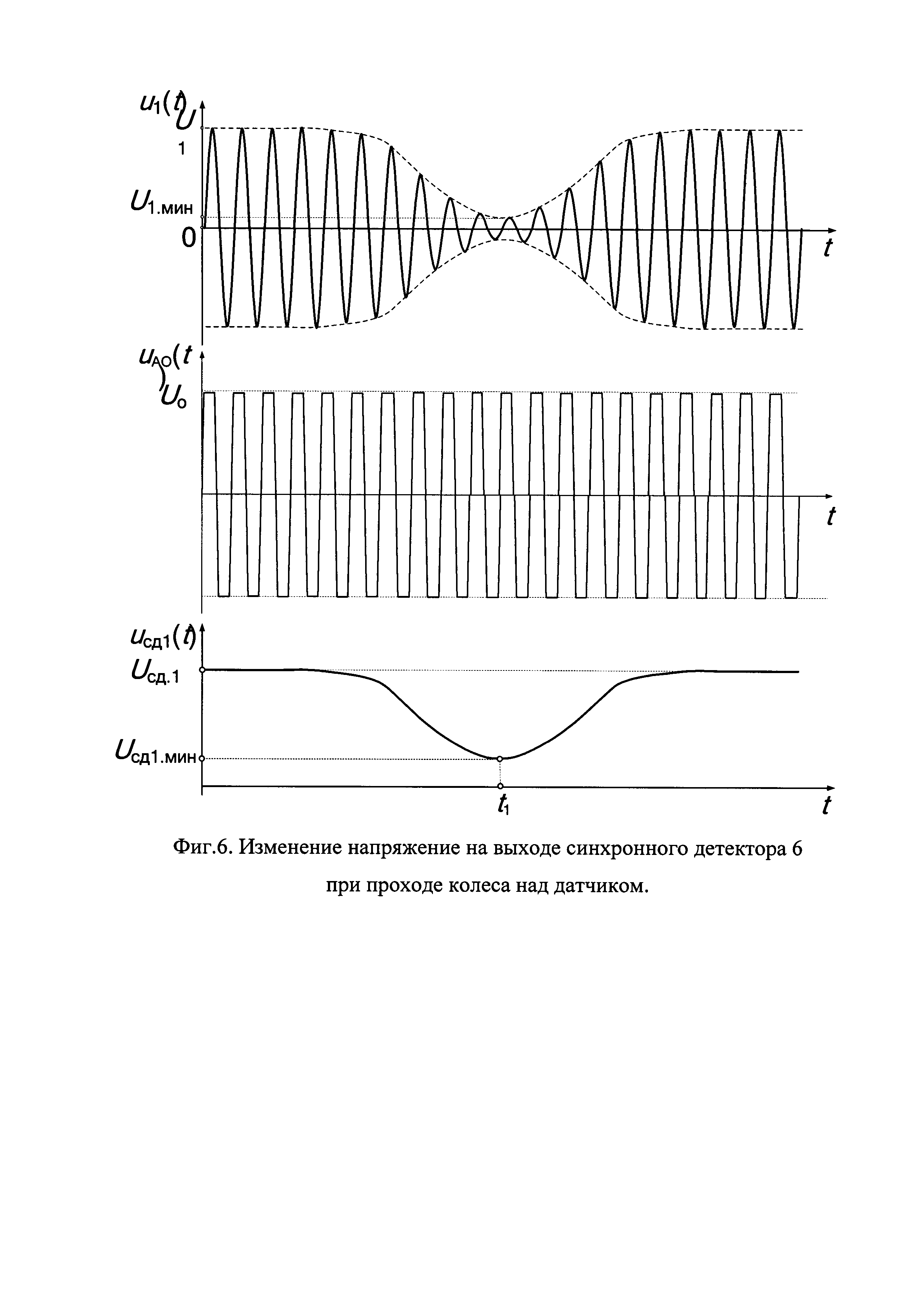
Принцип функционирования заявленного ДПК заключается в следующем. Кварцевый генератор 2 вырабатывает опорные гармонические колебания uo(t) на частоте ƒo, с высокой кратковременной стабильностью частоты δƒo. Вследствие возмущений и помех они имеют паразитную амплитудную модуляцию (фиг. 2). Для подавления паразитной амплитудной модуляции колебаний опорного генератора 2 предназначен амплитудный ограничитель 3, на выходе которого образуются колебания типа «меандр» uAO(t) с подавленной паразитной амплитудной модуляцией, которые подаются на входы измерительных генераторов с внешним возбуждением 4 и 5 в качестве возбуждающих колебаний (фиг. 3). Измерительные генераторы 4 и 5 вырабатывают гармонические колебания соответственно u1(t) и u2(t) на частотах ƒ1 и ƒ2. Благодаря внешнему возбуждению частоты колебаний ƒ1 и ƒ2 измерительных генераторов 4 и 5 равны частоте колебаний ƒo автогенератора 2, а их стабильность равна стабильности δƒ0 генератора 2.
Нагрузки измерительных генераторов 4 и 5 колебательные контура, в которые включены неэкранированные катушки индуктивности L4 и L5. Частоты колебаний выходных напряжений u1(t) и u2(t) измерительных генераторов 4 и 5 также совпадают с резонансными частотами ƒ10 и ƒ20 их колебательных контуров (фиг. 4). Начальные фазы ϕ1 и ϕ2 колебаний u1(t) и u2(t) соответственно измерительных генераторов 4 и 5 отличаются от фазы колебаний uo(t) генератора 2 на величину динамического запаздывания фазы в процессе возбуждения колебаний u1(t) и u2(t). Эта величина мала, поэтому можно считать ϕ1=ϕ2≈0 [5].
Колебания напряжений u1(t) и u2(t) с выходов измерительных генераторов 4 и 5 соответственно поступают параллельно на первые входы синхронных детекторов 6 и 7, на вторые входы которых поступают опорные колебания uo(t) типа «меандр» (фиг. 3), снимаемые с амплитудного ограничителя 3, на частоте ƒo, равной частоте колебаний напряжения uo(t) опорного генератора 2.
Выходные напряжения Uсд1 и Uсд2 синхронных детекторов 6 и 7, при условии малости начальных фаз ϕ1 и ϕ2, определяются соответственно по формулам [6]:


где k1 и k2 - коэффициенты передачи синхронных детекторов 6 и 7; Uo - амплитуда напряжения на выходе амплитудного ограничителя 3; U1 и U2 - амплитуды гармонических напряжений u1(t) и u2(t) соответственно на выходах измерительных генераторов 4 и 5.
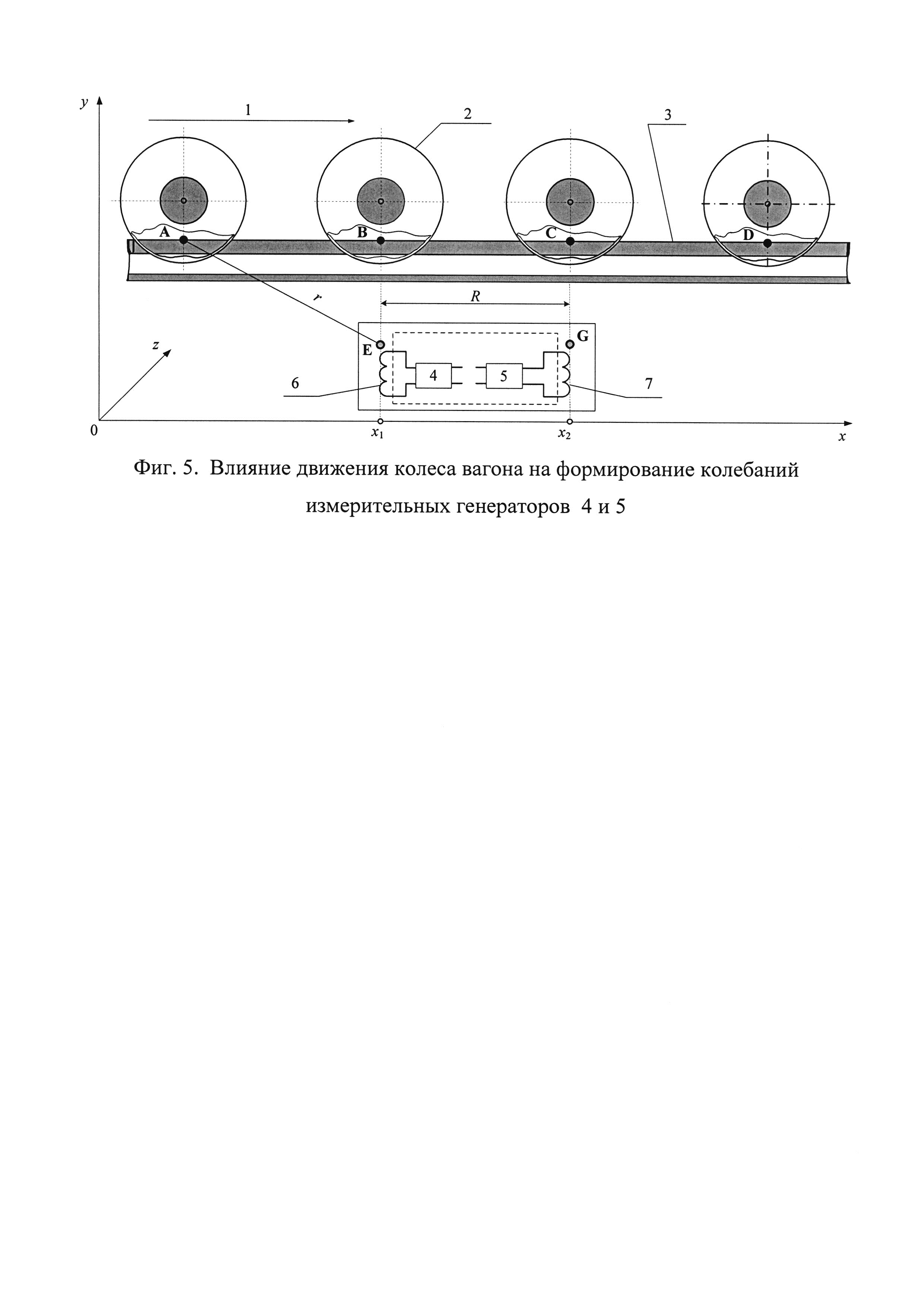
При направлении движения поезда 1 (фиг. 5) стальное (ферромагнитное) колесо вагона 2 по рельсовой линии 3 подходит к точке A. В точке A начинает сказываться его влияние на величину индуктивности L4 6 неэкранированной катушки (фиг. 5). Влияние сказывается в увеличении индуктивности L4 6, которое возникает за счет внесения ферромагнитного вещества в магнитное поле катушки. Вследствие этого уменьшается резонансная частота ƒ01 и увеличивается затухание колебательного контура измерительного генератора 4. Это приводит к уменьшению амплитуды U1 выходного напряжения измерительного генератора 4. При уменьшении расстояния AE=r(t), где E - точка расположения неэкранированной катушки индуктивности L4 6, происходит дальнейшее уменьшение амплитуды U1. Это уменьшение продолжается до подхода колеса к точке B. В момент t1, когда колесо находится в точке B, амплитуда колебаний u1(t) генератора 4 уменьшается до величины U1.мин. Соответственно напряжение Uсд1 (1) на выходе синхронного детектора 6 уменьшается до величины Uсд1.мин (фиг. 6). После прохода точки B влияние колеса на величину индуктивности L4 6 уменьшается, и при подходе колеса к точке C на рельсовой линии оно становится таким же, как и в точке A, а при подходе к точке D - практически исчезает (фиг. 5). В результате восстанавливается выходное напряжение синхронного детектора 6 (фиг. 1) до величины Uсд1.
Аналогичные процессы, только с поправкой на запаздывание из-за разноса катушек индуктивности L4 6, и L5 7, вдоль рельсовой линии 3 на расстояние R
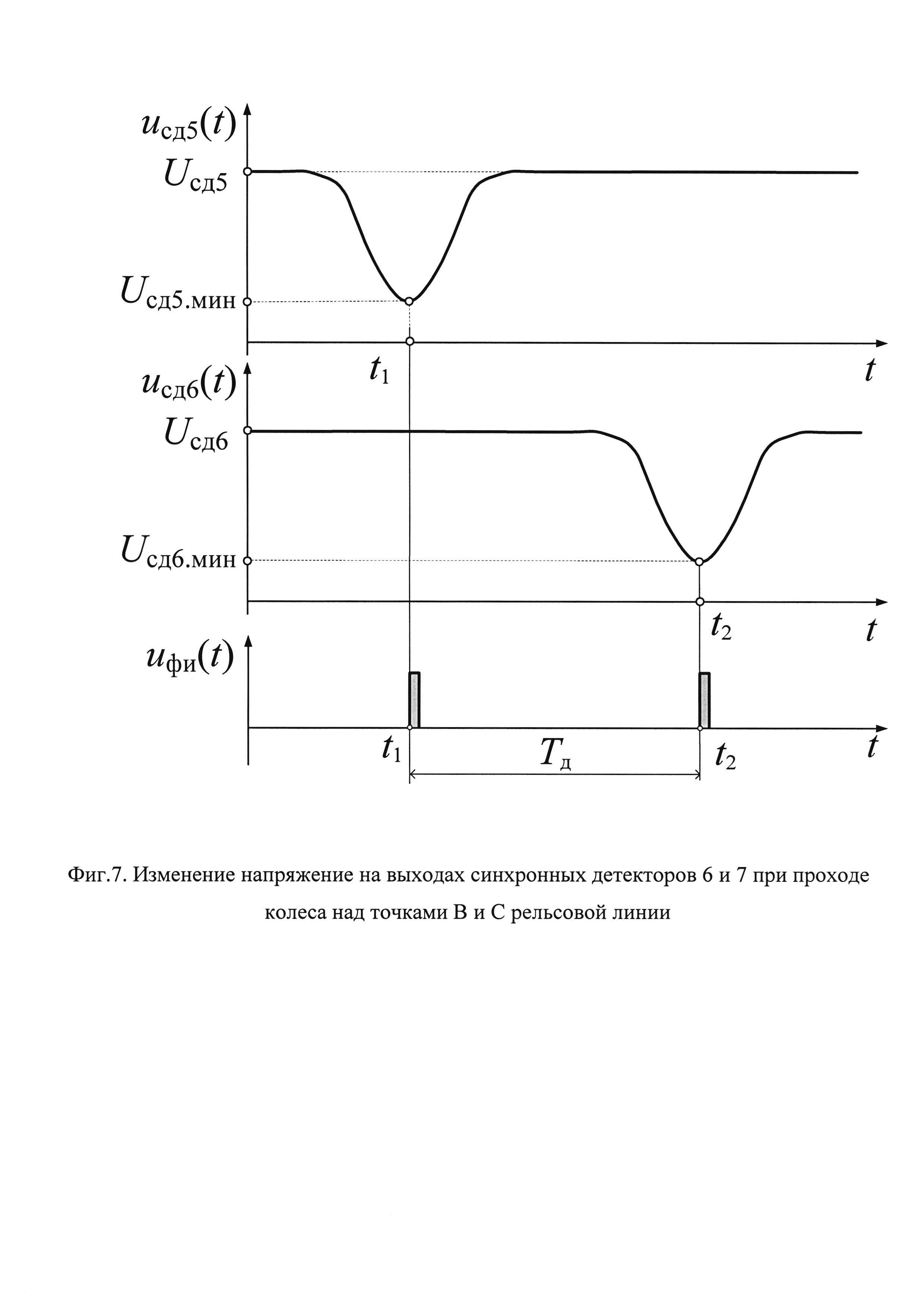
Временной промежуток Tд между минимумами выходных напряжений Uсд1 и Uсд2 синхронных детекторов 6 и 7 определяется по формуле:

где t1 и t2 - моменты времени достижения минимумов напряжениями с выходов соответственно синхронных детекторов 6 и 7 (фиг. 7); Vкд - скорость поступательного движения колеса над датчиком.
Таким образом, падение напряжений (1) и (2) на выходах синхронных детекторов 6 и 7 до уровней соответственно Uсд1.мин и Uсд2.мин, с последующим восстановлением исходного уровня, служит признаком прохода колеса вагона над датчиком. Измерение модуля временного промежутка Tд позволяет согласно формуле (3) вычислить скорость Vкд поступательного движения колеса над датчиком. Знак результата (3) - признак направления движения поезда, т.е. последовательности прохождения колесом вагона точек на рельсовой линии: A, B, C, D - прямое движение поезда; D, С, B, A - обратное движение.
Перепады напряжений с выходов синхронных детекторов 6 и 7 запускают формирователи импульсов 8 и 9 (фиг. 7), которые формируют нормированные прямоугольные однополярные импульсы uфи(t) в моменты достижения минимумов сигналами uсд1(t) и uсд2(t) синхронных генераторов 6 и 7 (фиг. 6).
Появление одного из импульсов - признак того, что колесо прошло одну из точек B или C и находится на рельсовой линии 3 в интервале x∈[x1, x2], т.е. между катушками индуктивности L4 6 и L5 7, что соответствует интервалу времени t∈[t1, t2].
Импульсные сигналы с выходов формирователей 8 и 9 приходят в качестве стартстопных на счетчик импульсов 10, на второй вход которого подаются счетные импульсы, снимаемые с синхронизатора, входящего в состав встроенного в ДПК приемника глобальной спутниковой навигационной системы (ГЛОНАСС) 11 [7].
Снимаемые со счетчика 10 счетные импульсы, существующие только на промежутке времени Tд (между двумя минимумами напряжений uсд1(t) и uсд2(t)), поступают на аналого-цифровой преобразователь (АЦП) 12. Снимаемый с АЦП 12 сигнал в виде цифрового двоичного кода промежутка времени Tд поступает на специализированный микропроцессор обработки сигналов датчика (СМОСД) 13. Одновременно в микропроцессор 13 поступают сигналы временной синхронизации и координаты ДПК с приемника ГЛОНАСС 11. Специализированный микропроцессор обработки сигналов датчика 13 выполняет обработку данных с АЦП 12 и ГЛОНАСС 11 согласно алгоритму, записанном в виде программы в программируемом постоянном запоминающем устройстве (ППЗУ) 14.
Алгоритм цифровой обработки сигналов ДПК в СМОСД 13 включает:
а) ввод исходных данных;
б) привязку моментов времени t1 и t2 к времени по шкале Госэталона Координированного Всемирного Времени UTC (SU) и формирование их цифрового представления


в) вычисление модуля и знака промежутка времени Tд;
г) вычисление скорости движения Vк колеса вагона над ДПК;
д) кодирование помехоустойчивым кодом:
- значений (по абсолютной шкале) моментов времени


- промежутка времени Tд,
- скорости движения колеса Vк;
е) формирование кодовых слов;
ж) вывод результатов обработки (кодовых слов) на выход СМОСД 13.
Кодовое слово, формируемое СМОСД 13, представляет собой кодированные помехоустойчивым кодом данные, подлежащие передаче с ДПК в информационную систему контроля и управления движением поездов. Кодовое слово состоит из разделенных по времени синхрогруппы (СГ) и информационной группы (ИГ) кодированных данных.
Синхрогруппа длительностью Tсг содержит:
а) последовательность синхронизирующих импульсов, предназначенных для синхронизации устройства приема кодированных сигналов;
б) импульсные посылки, представляющие собой ключ кода, необходимый для подготовки приемного устройства к декодированию информационной группы.
В информационную группу длительностью Tиг входят:
1) подгруппа служебных данных, состоящая из кодированных значений:
а) номера ДПК в номенклатуре датчиков структурно и функционально законченного комплекса систем и устройств железнодорожной автоматики и телемеханики;
б) координат ДПК, которые при установке датчика измеряются ГЛОНАСС 11 и вводятся в ППЗУ 14;
в) абсолютного времени tUTC, соответствующего моменту начала синхрогруппы сигналов ДПК;
2) подгруппа содержательных данных, включающая кодированные данные:
а) значений моментов времени


б) скорости движения Vк колеса вагона над ДПК;
в) значения промежутка времени Tд.
С выхода СМСОД 13 кодовое слово, поступает на передатчик 15 ДПК. В передатчике 15 импульсы кодового слова преобразуются в сверхвысокочастотный (СВЧ) сигнал с относительной фазовой манипуляцией и излучаются антенной 16 на несущей частоте диапазона СВЧ.
Излученные сигналы поступают на антенный вход диспетчерской системы 17, принимаются приемной антенной 18 и обрабатываются в приемнике 19. Диспетчерская система 17 распределяет данные, полученные с ДПК, по системам железнодорожной автоматики и телемеханики 20 для реализации алгоритмов их функционирования.
Таким образом, применение заявленной полезной модели позволяет устранить недостатки, присущие магнитным датчикам. А именно:
а) выполнить основные электронные узлы датчика по интегральной технологии, благодаря чему становится возможным их сопряжение с цифровой микропроцессорной техникой обработки сигналов;
б) обеспечить формирование датчиком сигнала о проходе колес со скоростями подвижного состава менее 5 км/ч в плоть до нулевой;
в) формировать совокупность служебных данных, присущих только данному ДПК: его номера, координат установки, привязку формируемых сигналов к абсолютному времени;
г) достичь, благодаря применению интегральной технологии, улучшения массогабаритных и энергетических показателей;
д) реализовать, на основе кодирования и применения относительной фазовой манипуляции, беспроводную, по радиоканалу, устойчивую к электромагнитным помехам и с соблюдением электромагнитной совместимости, передачу данных на расстояния, большие, чем с использованием специальных кабелей.
Предлагаемое устройство может служить базисом для создания беспроводной аппаратуры в области железнодорожной автоматики и телемеханики.
Литература
1. В.И. Шелухин. Датчики измерения и контроля устройств железнодорожного транспорта. М. Транспорт, 1990. 119 с.
2. Министерство путей сообщения РФ «Датчик магнитный ДМ-95Н» Техническое описание и инструкция по эксплуатации ВР3.253.002 ТО МПС РФ, 1995 г., 19 с.
3. Патент ФРГ N 3307689, опубл. 6.09.84 г., кл. B6 L 1/16, 33.
4. Патент N 3410014, опубл. 25.07.85 г., кл. H03K 17/95.
5. Шахтильдян В.В. Радиопередающие устройства Учебник для вузов / Шахтильдян В.В. Козырев В.Б. и др. - М.: Радио и связь, 2003.
6. Марюхненко B.C. Радиоприемные устройства. Часть 1. Учеб. пособие. - Иркутск.: ИВАИИ, 2001. -531 с.
7. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. - М.: Изд-во ИПЖР, 1998. - 400 с.
Реферат
Радиотехнический датчик прохода колес с определением направления движения предназначен для устранения недостатков, присущих известным магнитным датчикам прохода колес, а именно: выполнить основные электронные узлы датчика по интегральной технологии, благодаря чему становится возможным их сопряжение с цифровой микропроцессорной техникой обработки сигналов, обеспечить формирование датчиком сигнала о проходе колес со скоростями подвижного состава менее 5 км/ч вплоть до нулевой, формировать совокупность служебных данных, присущих только данному ДПК: его номера, координаты установки, привязку формируемых сигналов к абсолютному времени, достичь, благодаря применению интегральной технологии, улучшения массогабаритных и энергетических показателей, реализовать, на основе кодирования и применения относительной фазовой манипуляции, беспроводную, по радиоканалу, устойчивую к электромагнитным помехам и с соблюдением электромагнитной совместимости, передачу данных на расстояния, чем с использованием специальных кабелей.Предлагаемое устройство может служить базисом к применению беспроводной аппаратуры в области железнодорожной автоматики и телемеханики.
Комментарии