Способ и устройство управления для определения длины по меньшей мере одного участка пути - RU2560211C1
Код документа: RU2560211C1
Описание
В связи с эксплуатацией и управлением сооружениями для обеспечения железнодорожных перевозок по разным причинам может потребоваться или может быть целесообразным определение длины одного или нескольких участков пути. Это относится, в частности, к управлению маневровыми работами на сортировочных горках, поскольку здесь точное знание длины участков пути, по которым скатываются единицы подвижного состава, имеет большое значение для надежного и эффективного управления сооружением. Так, например, длина участков пути между вагонными замедлителями сортировочной горки является важной входной величиной для прогнозирования характеристики время-путь скатывающихся единиц подвижного состава и, тем самым, для максимально эффективного и одновременно надежного управления всей сортировочной горкой.
В принципе, возможность определения длины участков пути заключается в их оптическом измерении, например, в начале проекта. Эти действия имеют, однако, тот недостаток, что, в частности, измерение эффективных длин кривых через стрелки и замедлители подвержено ошибкам и, тем самым, соответствующие результаты измерений являются сравнительно неточными.
В основе изобретения лежит задача создания особенно производительного и одновременно сравнительно легко реализуемого способа определения длины по меньшей мере одного участка пути.
Эта задача решается, согласно изобретению, посредством способа определения длины по меньшей мере одного участка пути, при котором регистрируются сообщения о прохождении, вызванные прохождением по меньшей мере одного участка пути несколькими рельсовыми транспортными средствами и созданные ограничивающими соответствующий участок пути рельсовыми контактами, а длина по меньшей мере одного участка пути определяется посредством статистической оценки, учитывающей временные промежутки между зарегистрированными сообщениями о прохождении и межосевые расстояния рельсовых транспортных средств.
Предложенный способ позволяет использовать предпочтительным образом тот факт, что участки пути, длину которых следует определить, на практике зачастую ограничены рельсовыми контактами. При этом соответствующие рельсовые контакты могут представлять собой, например, такие, которые служат для измерения скорости или подтверждения присутствия рельсовых транспортных средств. В рамках предложенного способа рельсовыми контактами называются любые датчики, подходящие для обнаружения отдельных колес или осей рельсовых транспортных средств. В отношении принципа действия речь может идти при этом, например, о рельсовых контактах механического, гидравлического, пневматического, магнитного, индуктивного или же оптического действия.
За счет прохождения по меньшей мере одного участка пути несколькими рельсовыми транспортными средствами рельсовые контакты, ограничивающие соответствующий участок или соответствующие участки пути, создают сообщения о прохождении, которые на первом этапе способа регистрируются. При этом, с одной стороны, существует, например, возможность создания и регистрации для каждой отдельной оси или каждого отдельного колеса рельсового транспортного средства отдельного сообщения о прохождении. С другой стороны, также возможны сбор со стороны рельсовых контактов информации о нескольких осях или колесах рельсового транспортного средства и создания для этих осей или колес одного общего сообщения о прохождении. В этом случае, как правило, потребуется, чтобы со стороны рельсовых контактов с соответствующим сообщением о прохождении была создана информация в моменты обнаружения отдельных осей или колес.
На втором этапе способа длина по меньшей мере одного участка пути определяется посредством статистической оценки, учитывающей временные промежутки между зарегистрированными сообщениями о прохождении и межосевые расстояния рельсовых транспортных средств. При этом временной промежуток между зарегистрированными сообщениями о прохождении может определяться, с одной стороны, например, за счет того, что со стороны принимающего сообщения о прохождении устройства, которое может представлять собой, например, устройство управления, протоколируются, а затем используются моменты соответствующего приема сообщений о прохождении. В частности, в случае временной синхронизации внутри системы, кроме того, в принципе, возможно также, чтобы временной промежуток между зарегистрированными сообщениями о прохождении брался из содержащихся в самих сообщениях о прохождении сведений, например в виде штемпелей времени.
Способ дает то преимущество, что с помощью временного промежутка между зарегистрированными сообщениями о прохождении и межосевых расстояний рельсовых транспортных средств с неожиданно низкими затратами возможно сравнительно точное определение длины по меньшей мере одного участка пути. При этом предпочтительным образом длина по меньшей мере одного участка пути и, тем самым, расстояние между соответствующими рельсовыми контактами или определенным образом также их положение определяются с помощью сообщений и прохождении самих рельсовых контактов. Вследствие этого исключены возможные различия между определенной длиной соответствующего участка пути и фактическими «местами действия» рельсовых контактов или «активного расстояния» между ними, которые могли бы возникнуть, например, при оптическом определении длины по меньшей мере одного участка пути. Благодаря этому при последующих прохождениях по меньшей мере одного участка пути другими рельсовыми транспортными средствами активной становится длина по меньшей мере одного участка пути, которую можно назвать также эффективной длиной и которая была предварительно определена с помощью зарегистрированных сообщений о прохождении.
Кроме того, способ предпочтителен также в том отношении, что за счет статистической оценки данных компенсируются неточности в регистрации движения рельсовых транспортных средств. Так, неточности в отношении измеренных значений для отдельного рельсового транспортного средства возникают, например, за счет того, что его межосевые расстояния, как правило, имеются в распоряжении лишь с ограниченной точностью. Кроме того, следует учесть, что характер движения соответствующего рельсового транспортного средства на соответствующем участке пути известен неполностью и поэтому возникает возможность того, что соответствующее рельсовое транспортное средство будет двигаться в пределах участка пути, длину которого следует определить, неравномерно или с неравномерным ускорением. Вследствие этого в отношении отдельного рельсового транспортного средства определение длины по меньшей мере одного участка пути возможно лишь в виде оценки со сравнительно большой ошибкой. Предполагая, что возникающие в отношении отдельных рельсовых транспортных средств ошибки статистически одинаково распределены, можно, однако, за счет статистического рассмотрения достаточно большого числа отдельных результатов, т.е. с учетом достаточно большого числа рельсовых транспортных средств, определить фактическое значение длины по меньшей мере одного участка пути со сравнительно высокой точностью. То же справедливо и в отношении временных промежутков между сообщениями о прохождении, которые, как правило, уже только за счет дискретной регистрации измеренных значений, будут иметь определенную нечеткость, которая может составлять, например, порядка миллисекунд.
В рамках способа, в принципе, возможно взятие межосевых расстояний рельсовых транспортных средств из соответствующей базы данных, например в виде системы предупреждений. Однако такие действия имеют на практике нередко тот недостаток, что соответствующие значения имеют сравнительно большую неточность и, кроме того, не гарантировано, что все межосевые расстояния, предоставляемые в распоряжение базой данных, были измерены единой системой с единой ошибкой.
Преимущественно способ осуществляется таким образом, что межосевые расстояния рельсовых транспортных средств определяются по меньшей мере одним сенсорным устройством, а длина по меньшей мере одного участка пути определяется с учетом полученных межосевых расстояний. В соответствии с предыдущими пояснениями это дает то преимущество, что для межосевых расстояний рельсовых транспортных средств используются едино полученные значения, в основном, с единой ошибкой при определении длины по меньшей мере одного участка пути.
Преимущественно способ может осуществляться также таким образом, что в случае расположенного на сортировочной горке участка пути регистрируются сообщения о прохождении, вызванные прохождением по нему рельсовых транспортных средств в виде скатывающихся вагонов или групп вагонов и созданные ограничивающими соответствующий участок пути рельсовыми контактами. Это предпочтительно, поскольку сортировочные горки имеют обычно большое число ограниченных рельсовыми контактами участков пути, длину которых следует точно определить для эффективного и надежного управления сортировочной горкой. В этой связи способ позволяет во время ее эксплуатации определить с помощью сообщений о прохождении, вызванных прохождением путей движения сортировочной горки скатывающимися вагонами или группами вагонов, длину соответствующего участка пути не требующим больших затрат образом со сравнительно высокой точностью, которая может лежать, например, в диапазоне нескольких сантиметров. При этом предпочтительным образом видны, в частности, и такие изменения длин участков пути, которые возникают во время эксплуатации сортировочной горки, например, на основе изменений положения отдельных рельсовых контактов. За счет того, что соответствующие изменения могут регистрироваться как качественно, так и количественно, перерабатывающая способность и безопасность эксплуатации сортировочной горки предпочтительно не зависят от того, что соответствующие изменения включаются в проектные данные сортировочной горки и, тем самым, могут учитываться при управлении ею.
Согласно другому, особенно предпочтительному варианту, в отношении соответствующего рельсового транспортного средства по временным промежуткам между сообщениями о прохождении определяются значения скорости и полученные значения скорости, а также межосевые расстояния рельсового транспортного средства контролируются на их совместимость. При этом определение значений скорости может осуществляться, с одной стороны, с учетом межосевых расстояний рельсового транспортного средства, а, с другой стороны, также с учетом исходного значения длины соответствующего участка пути. Если в рамках контроля совместимости полученных значений скорости и межосевых расстояний рельсового транспортного средства в отношении межосевых расстояний в пределах одной тележки соответствующего рельсового транспортного средства возникает слишком большое отклонение, или, например, полученные значения скорости имеют резкие отклонения, то соответствующий набор данных, т.е. полученные для соответствующего рельсового транспортного средства данные, преимущественно исключается/исключаются из дальнейшего расчета.
Согласно одному особенно предпочтительному варианту способа, по отношению к соответствующему рельсовому транспортному средству с учетом эталонного значения межосевого расстояния в пределах одной тележки осуществляется корректировка межосевых расстояний. Так, например, стандартизированная Международным союзом железных дорог тележка Y25, которая по меньшей мере в Европе, является наиболее распространенной тележкой грузовых вагонов, имеет межосевое расстояние 1,8 м. Если межосевое расстояние сообщается или измеряется, например, в диапазоне 1,7-1,9 м, то можно, как правило, исходить из того, что оно корректным образом соответствует эталонному значению межосевого расстояния в пределах одной тележки. Благодаря этому можно не только изменять соответствующее межосевое расстояние до эталонного значения, но и, кроме того, осуществлять соответствующее перешкалирование для остальных межосевых расстояний.
Преимущественно способ может осуществляться также таким образом, что по отношению к соответствующему рельсовому транспортному средству по межосевым расстояниям и временным промежуткам между сообщениями о прохождении определяется кривая место-время. Это предпочтительно, поскольку соответствующая кривая место-время содержит всю информацию, необходимую для наилучшей оценки зарегистрированных для соответствующего рельсового транспортного средства данных. Преимущественно определение кривой место-время может осуществляться с учетом исходного значения длины соответствующего участка пути.
Согласно другому, особенно предпочтительному варианту способа, по отношению к соответствующему рельсовому транспортному средству с помощью кривой место-время определяется по меньшей мере одно корректировочное значение длины по меньшей мере одного участка пути. При этом, предполагая постоянную скорость рельсового транспортного средства, кривая место-время может быть образована по имеющимся в распоряжении значениям места и времени полиномом нулевого порядка или же более сложными полиномами более высокого порядка, которые согласовываются с данными преимущественно за счет алгоритмов Левенберга-Марквардта. Преимущественно при этом помимо по меньшей мере одного корректировочного значения длины по меньшей мере одного участка пути можно определить дополнительно корректировочные значения соответствующих межосевых расстояний.
В части устройства управления для определения длины по меньшей мере одного участка пути в основе изобретения лежит задача создания устройства управления, которое способствовало бы сравнительно простой реализации особенно производительного способа определения по меньшей мере одного участка пути.
Эта задача решается, согласно изобретению, посредством устройства управления для определения длины по меньшей мере одного участка пути, причем оно выполнено с возможностью регистрации сообщений о прохождении, вызванных прохождением по меньшей мере одного участка пути рельсовым транспортным средством и созданных ограничивающими соответствующий участок пути рельсовыми контактами, и определения длины по меньшей мере одного участка пути посредством статистической оценки, учитывающей временные промежутки между зарегистрированными сообщениями о прохождении и межосевые расстояния рельсовых транспортных средств.
Преимущества предложенного устройства управления соответствуют преимуществам предложенного способа, так что в этом отношении следует сослаться на приведенные выше рассуждения. То же относится к приведенным ниже предпочтительным вариантам выполнения устройства управления касательно соответствующего предпочтительного варианта способа, так что и в этом отношении следует сослаться на приведенные выше пояснения.
Согласно одному особенно предпочтительному варианту для определения межосевых расстояний рельсовых транспортных средств, устройство управления содержит по меньшей мере одно сенсорное устройство и выполнено с возможностью определения длины по меньшей мере одного участка пути с учетом полученных межосевых расстояний.
Преимущественно устройство управления в случае участка пути, расположенного на сортировочной горке, выполнено с возможностью регистрации сообщений о прохождении, вызванных прохождением по нему рельсовых транспортных средств в виде скатывающихся вагонов или групп вагонов и созданных ограничивающими соответствующий участок пути рельсовыми контактами.
Согласно другому предпочтительному варианту, по отношению к соответствующему рельсовому транспортному средству устройство управления выполнено с возможностью определения по временным промежуткам между сообщениями о прохождении значений скорости и контроля полученных значений скорости, а также межосевых расстояний рельсового транспортного средства на их совместимость.
Предпочтительным образом устройство управления может быть также выполнено с возможностью корректировки межосевых расстояний по отношению к соответствующему рельсовому транспортному средству с учетом эталонного значения межосевого расстояния в пределах одной тележки.
Преимущественно устройство управления выполнено с возможностью определения по отношению к соответствующему рельсовому транспортному средству кривой место-время по межосевым расстояниям и временным промежуткам между сообщениями о прохождении.
Согласно другому, особенно предпочтительному варианту, управления выполнено с возможностью определения по отношению к соответствующему рельсовому транспортному средству с помощью кривой место-время по меньшей мере одного корректировочного значения длины по меньшей мере одного участка пути.
Изобретение включает в себя далее систему управления сортировочной горкой, содержащую предложенное устройство управления или устройство управления в соответствии с одним из описанных выше вариантов предложенного устройства управления, а также ограничивающие соответствующий участок пути рельсовые контакты для создания сообщений о прохождении, вызванных прохождением по меньшей мере одного участка пути несколькими рельсовыми транспортными средствами.
Изобретение более подробно поясняется ниже на примере его осуществления. На единственной фигуре чертежа для пояснения примера осуществления способа изображена схема с примером выполнения устройства управления.
Рельсовое транспортное средство 10 включает в себя две сцепленные между собой единицы в виде грузовых вагонов 20, 30. В рамках данного примера предположим, что рельсовое транспортное средство 10 движется слева направо по спускному пути сортировочной горки.
Следует указать на то, что в отличие от изображения на чертеже рельсовое транспортное средство 10 может включать в себя, разумеется, также только одну единицу или же более двух сцепленных между собой единиц 20, 30.
Вдоль проходимого рельсовым транспортным средством 10 пути расположены ограничивающие участки L1-L3 пути рельсовые контакты K1-K4. Они отличаются тем, что выполнены любым известным образом для обнаружения осей или колес А1-А8 рельсового транспортного средства 10. В пределах сортировочной горки рельсовые контакты K1-K4 могут быть предусмотрены, например, для обнаружения состояния занятости участка пути, например за счет замедлителя, или для определения скорости рельсового транспортного средства 10.
За счет прохождения участков L1-L3 пути рельсовым транспортным средством 10 рельсовые контакты K1-K4 создают сообщения о прохождении. Они передаются рельсовыми контактами K1-K4 через коммуникационные соединения 41-44 на устройство управления 50, которое может представлять собой, например, компьютер для управления работой сортировочной горки. При этом устройство управления 50 включает в себя предпочтительно компоненты аппаратного обеспечения, например в виде процессоров и средств памяти, и компоненты программного обеспечения, например в виде программного кода.
Сообщения о прохождении могут представлять собой, в принципе, сигналы любого рода; к ним относятся, в частности, цифровые и аналоговые сигналы.
В рамках описанного примера предположим, что со стороны рельсовых контактов K1-K3 на устройство управления 50 передаются сообщения о прохождении в виде аналоговых импульсов или сигналов. Регистрация сообщений о прохождении устройством управления 50 обозначена графами в нем, схематично изображающими зарегистрированные им сообщения о прохождении или сигналы SK1-SK3 рельсовых контактов K1-K3 в качестве функции времени t. При этом для каждого рельсового контакта Ki и каждой обнаруженной соответствующим рельсовым контактом оси Aj рельсового транспортного средства 10 возникает сообщение о прохождении или сигнал SKiAj. Для каждого из сообщений о прохождении устройство управления 50 регистрирует момент его поступления, что обозначено временем t в качестве входной величины устройства управления 50. Если время передачи сообщений о прохождении разных рельсовых контактов K1-K4 отличается, то это, при необходимости, следует учитывать в рамках оценки.
В изображенной ситуации все оси А1-А8 рельсового транспортного средства 10 прошли первый в направлении движения рельсовый контакт K1, так что видны восемь импульсов или сообщений о прохождении. По сравнению с этим второй рельсовый контакт K2 еще не обнаружил самую заднюю в направлении движения ось A8. Рельсовый контакт K3 уже обнаружил самую переднюю в направлении движения ось A1 и собирается обнаружить также ось A2 и передать на устройство управления 50 соответствующее сообщение о прохождении. Что касается рельсового контакта K4, то еще отсутствует прохождение рельсовым транспортным средством 10, так что здесь графическое изображение также отсутствует. Во избежание недоразумений следует указать на то, что обозначенные в устройстве управления 50 графы представляют собой лишь схематичное изображение, так что, в частности, моменты сообщений о прохождении не совсем точно соответствуют тем, которые фактически возникли бы для рельсового транспортного средства 10 в показанном положении рельсовых контактов K1-K4.
Следует обратить внимание на то, что в отличие от изображенного примера также рельсовые контакты K1-K4 могли бы определять момент обнаружения соответствующей оси и передавать на устройство управления 50 с соответствующим сообщением о прохождении. В этом случае, как правило, будет целесообразным или потребуется синхронизация по времени рельсовых контактов K1-K4.
В частности, в случае сообщения о прохождении в виде цифрового сигнала оно может содержать однозначную идентификацию соответствующего рельсового контакта K1-K4, чтобы независимо от соответствующих коммуникационных соединений 41-44 однозначно соотнести сообщение о прохождении с соответствующим рельсовым контактом K1-K4.
Коммуникационные соединения 41-44 могут быть выполнены проводными и беспроводными, т.е., например, на радиооснове. Кроме того, рельсовые контакты K1-K4 и устройство управления 50 могут быть соединены между собой, например, системой шин.
Следует указать на то, что сигналы SKiAj показаны лишь схематично, и в зависимости от соответствующей реализации могут, разумеется, возникать и другие их характеристики. Сюда относится, в частности, случай, когда сообщения о прохождении или передающие их сигналы в отличие от изображенных на чертеже могут изображаться в качестве функции времени t в виде вертикальных штрихов и происходит либо лишь точечная передача соответствующего сообщения о прохождении, либо устройство управления 50 определяет относящийся к каждому принятому сообщению о прохождении момент.
С учетом зарегистрированных сообщений о прохождении способ определения длины участков L1-L3 пути может осуществляться таким образом, что для всех учтенных при этом рельсовых транспортных средств 10 сначала записываются соответственно межосевые расстояния рельсового транспортного средства 10, которые контролируются на их достоверность или совместимость с сообщениями о прохождении. Это может происходить, например, в таком виде, что для межосевых расстояний в пределах одной тележки осуществляется контроль того, соответствует ли расстояние между соответствующими осями эталонному значению. Кроме того, для осей, расположенных не в пределах одной или одной и той же тележки, может осуществляться контроль того, не превышено ли минимальное межосевое расстояние. При этом, например, возможно, чтобы на основе рассмотрения соответствующих межосевых расстояний обычных грузовых вагонов принималось соответствующее минимальное значение 7 м, кроме того, по временным промежуткам между сообщениями о прохождении может осуществляться определение значений скорости, т.е. средних скоростей, а за счет сравнения полученных значений скорости с межосевыми расстояниями рельсового транспортного средства - контроль совместимости. Если при этом неожиданно возникают большие отклонения или недостоверности, то рассмотрение соответствующего рельсового транспортного средства или полученных о нем данных прерывается, т.е. соответствующее рельсовое транспортное средство 10 исключается из дальнейшего расчета.
С учетом эталонных значений межосевого расстояния в пределах одной тележки, которое в зависимости от соответствующих условий может составлять, например, 1,8 м, можно, кроме того, осуществить корректировку межосевых расстояний рельсового транспортного средства 10 за счет соответствующего перешкалирования. Благодаря этому можно осуществить более точное и, в целом, совместимое согласование межосевых расстояний по отношению к межосевым расстояниям, сообщенным системой предупреждения и/или измеренным в зоне горба горки.
На следующем этапе в петле через все сообщения о прохождении к соответствующему рельсовому транспортному средству 10 можно осуществить запись взятого, например, из сообщений о прохождении времени прохождения рельсовых контактов K1-K4 ко всем осям рельсового транспортного средства 10 и на основе соответствующих исходных значений соотнести с соответствующими местами расположения рельсовых контактов K1-K4.
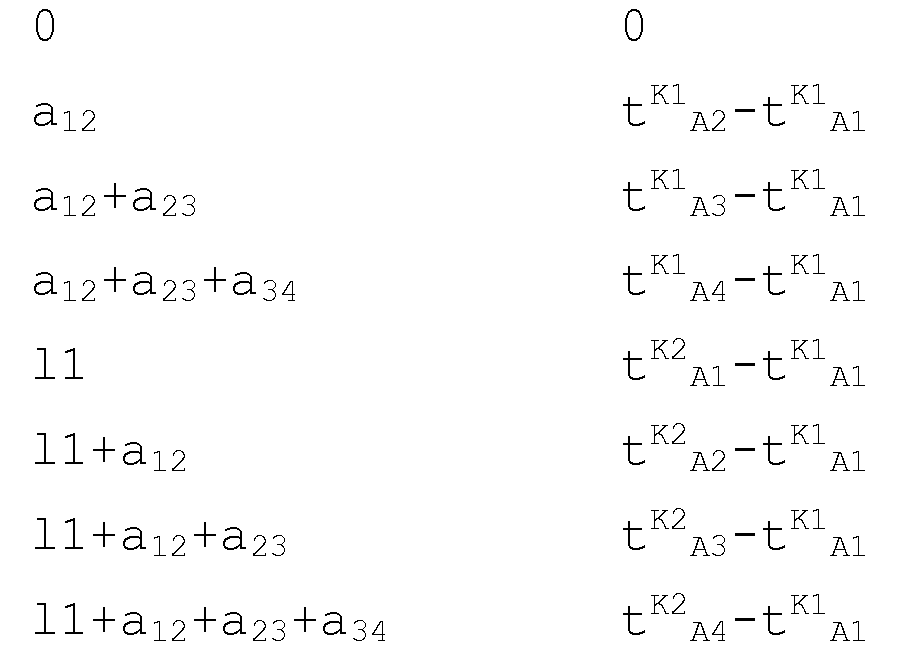
В рамках описанного примера далее по отношению к соответствующему рельсовому транспортному средству 10 по межосевым расстояниям, исходному значению длины соответствующего участка L1-L3 пути и временным промежуткам между сообщениями о прохождении определяется кривая место-время. Для этого сначала по межосевым расстояниям и расстоянию между соответствующими местами расположения рельсовых контактов K1-K4 создается соотношение места и времени. Это соотношение в случае упрощенного по сравнению с изображенным примера рельсового транспортного средства 10 только с четырьмя осями А1-А4 с расстояниями а12, а23, а34 между ними и с ограничивающими участок L1 пути длиной l1 рельсовыми контактами K1, K2 на расстоянии l1 с измеренным временем их прохождения tK1A1-tK1A4 и tK2A1-tK2A4 может выглядеть, например, следующим образом:
С помощью значений места и времени можно согласовать кривую место-время, чтобы за счет этого определить межосевые расстояния и длину участка L1 пути или при полном рассмотрении всех сообщений о прохождении - соответствующую длину участков L1-L3 пути. В качестве метода расчета соответствия данных для согласования в зависимости от выбранной ступени полинома подходят либо элементарные методы, например в виде полинома нулевого порядка при предположении постоянной скорости рельсового транспортного средства 10, либо, например, также прогрессивные алгоритмы Левенберга-Марквардта. В результате при этом по отношению к соответствующему рельсовому транспортному средству 10 с помощью кривой место-время определяются корректировочные значения межосевых расстояний и длины соответствующего участка L1-L3 пути.
Описанные выше этапы осуществляются для нескольких, преимущественно для большого числа рельсовых транспортных средств 10. Это может осуществляться в рамках штатной работы сортировочной горки для скатывающихся единиц в виде вагонов или групп вагонов. При этом за счет статистического рассмотрения или статистической оценки полученных для отдельных рельсовых транспортных средств 10 значений длины соответствующего участка L1-L3 пути предпочтительным образом можно исключить такие отдельные результаты, которые, например, на основе проведенной корректировки межосевых расстояний привели к неправильному оптимуму согласования кривой место-время.
За счет статистической оценки действующих расстояний между рельсовыми контактами, например, с помощью максимально допустимого разброса результатов определения длины соответствующего участка L1-L3 пути описанным способом предпочтительно можно, несмотря на возможное в отдельном случае относительно неточное определение длины соответствующего участка L1-L3 пути, осуществить в результате сравнительно точное определение длины по меньшей мере одного участка L1-L3 пути.
Описанный способ отличается, тем самым, в частности, тем, что неточности в регистрации движения рельсовых транспортных средств или отцепов в виде скатывающихся вагонов или групп вагонов компенсируются за счет статистической оценки данных. При этом предпочтительным образом можно контролировать образованные рельсовыми контактами K1-K4 участки L1-L3 пути по отношению к их длине в рамках штатной работы сортировочной горки. Кроме того, существует возможность нового определения длины соответствующего участка пути в отношении смещенных в своем положении или заново добавленных рельсовых контактов. Кроме того, за счет охватывающей, включающей в себя несколько участков пути движения оценки можно отличить смещение одного отдельного рельсового контакта от смещения целого, ограниченного рельсовыми контактами узла, например в виде стрелки или замедлителя. Способ позволяет также измерить любые положения на пути движения за счет временной установки рельсового контакта и последующего прохождения, например движущихся вдоль сортировочной горки вагонов или групп вагонов.
Кроме того, способ имеет то принципиальное преимущество, что длина участков L1-L3 пути определяется по отношению к рельсовым контактам K1-K4, расстояние между которыми имеет значение в рамках, например, способа управления сортировочной горкой, и что, тем самым, отпадают возможные отличия между оптически измеренной и «технически эффективной» длинами соответствующего участка L1-L3 пути.
Реферат
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте и может использоваться для определения длины участка пути. Техническое решение заключается в определении длины по меньшей мере одного участка пути, регистрации сообщений о прохождении, вызванных прохождением по меньшей мере одного участка пути несколькими рельсовыми транспортными средствами и созданных ограничивающими соответствующий участок пути рельсовыми контактами. Длина участка пути определяется устройством управления посредством статистической оценки, учитывающей временные промежутки между зарегистрированными сообщениями о прохождении и межосевые расстояния рельсовых транспортных средств. Достигается повышение точности определения длины участка железной дороги. 3 н. и 22 з.п. ф-лы, 1 ил.
Формула
- регистрируют сообщения о прохождении, вызванные прохождением по меньшей мере одного участка (L1, L2, L3) пути несколькими рельсовыми транспортными средствами (10) и созданные ограничивающими соответствующий участок (L1, L2, L3) пути рельсовыми контактами (K1, K2, K3, K4), а длину по меньшей мере одного участка (L1, L2, L3) пути определяют посредством статистической оценки, учитывающей временные промежутки между зарегистрированными сообщениями о прохождении и межосевые расстояния рельсовых транспортных средств (10).
- регистрируют сообщения о прохождении, вызванные прохождением по нему рельсовых транспортных средств (10) в виде скатывающихся вагонов или групп вагонов и созданные ограничивающими соответствующий участок (L1, L2, L3) пути рельсовыми контактами (K1, K2, K3, K4).
- по временным промежуткам между сообщениями о прохождении определяют значения скорости и
- полученные значения скорости, а также межосевые расстояния рельсового транспортного средства (10) контролируют на их совместимость.
- по временным промежуткам между сообщениями о прохождении определяют значения скорости и
- полученные значения скорости, а также межосевые расстояния рельсового транспортного средства (10) контролируют на их совместимость.
- по временным промежуткам между сообщениями о прохождении определяют значения скорости и
- полученные значения скорости, а также межосевые расстояния рельсового транспортного средства (10) контролируют на их совместимость.
- по временным промежуткам между сообщениями о прохождении определяют значения скорости и
- полученные значения скорости, а также межосевые расстояния рельсового транспортного средства (10) контролируют на их совместимость.
- регистрации сообщений о прохождении, вызванных прохождением по меньшей мере одного участка (L1, L2, L3) пути рельсовым транспортным средством (10) и созданных ограничивающими соответствующий участок (L1, L2, L3) пути рельсовыми контактами (K1, K2, K3, K4), и
- определения длины по меньшей мере одного участка (L1, L2, L3) пути посредством статистической оценки, учитывающей временные промежутки между зарегистрированными сообщениями о прохождении и межосевые расстояния рельсовых транспортных средств (10).
- содержит по меньшей мере одно сенсорное устройство и
- выполнено с возможностью определения длины по меньшей мере одного участка (L1, L2, L3) пути с учетом полученных межосевых расстояний.
- определения по временным промежуткам между сообщениями о прохождении значений скорости и
- контроля полученных значений скорости, а также межосевых расстояний рельсового транспортного средства (10) на их совместимость.
- определения по временным промежуткам между сообщениями о прохождении значений скорости и
- контроля полученных значений скорости, а также межосевых расстояний рельсового транспортного средства (10) на их совместимость.
- устройство управления (50) по любому из пп. 14-24 и
- ограничивающие соответствующий участок (L1, L2, L3) пути рельсовые контакты (K1, K2, K3, K4) для создания сообщений о прохождении, зарегистрированных устройством управления (50) и вызванных прохождением по меньшей мере одного участка (L1, L2, L3) пути несколькими рельсовыми транспортными средствами (10).
Комментарии