Устройство для неразрушающего контроля и профилометрии рельсов - RU195883U1
Код документа: RU195883U1
Чертежи

Описание
Полезная модель относится к области профилометрии и неразрушающего контроля, в том числе, с помощью ультразвуковых волн для визуализации внутреннего строения объекта и обнаружения внутренних дефектов, в частности, в отдельных сечениях рельсов, в сварных стыках, в том числе с помощью оптических волн для определения геометрических параметров рельсов при выборочном контроле.
Известно устройство для контроля железнодорожных рельсов по патенту на изобретение №2309402 (опубликован 27.10.2007), на поверхность катания рельса устанавливают ультразвуковой измерительный блок, содержащий несколько измерительных элементов, каждый из которых по соответствующим схемам прозвучивания способен обнаружить дефекты в определенной зоне сварного стыка рельса, последовательно зондируют сварной стык рельса измерительными элементами, для чего излучают зондирующие и принимают отраженные от возможных дефектов ультразвуковые сигналы, при этом на выбранные участки поверхности рельса устанавливают несколько ультразвуковых измерительных блоков, которые неподвижно закрепляют на них, выбирают дополнительные схемы прозвучивания между измерительными элементами, схемы прозвучивания измерительных элементов выбирают так, чтобы они совместно позволяли обнаружить дефекты во всем сечении сварного стыка рельса с заданной разрешающей способностью, при зондированиях измеряют амплитуды и временное положение отраженных сигналов, вычисляют пространственное положение дефекта, объединяют и отображают результаты всех зондирований, по которым оценивают их и принимают решение о качестве сварного стыка.
Недостатком устройства является большое количество измерительных блоков (УЗ-преобразователей), что увеличивает время на настройку устройства, а также низкое качество измерений, обусловленное неподвижностью системы позиционирования преобразователей, что ведёт к возможному пропуску и отсутствию оценки дефектов, так как дефекты могут иметь различную геометрическую ориентацию и положение в сварном шве, в том числе отсутствие профилометрии, как метода неразрушающего контроля.
Технический результат, на получение которого направлена полезная модель повышение достоверности обнаружения и оценки дефектов за счет реализации точного позиционирования и возможности продольного и поперечного перемещения зондов неразрушающего контроля относительно рельса.
Технический результат достигается в устройстве, которое содержит, по крайней мере, один сканирующий модуль, выполненный с возможностью обеспечения перемещения в процессе измерений, по крайней мере, одного зонда неразрушающего контроля вдоль поперечного контура видимой части рельса, и выполнено с возможностью перемещения в процессе измерений сканирующего модуля вдоль рельса.
В одном из вариантов выполнения устройства сканирующий модуль содержит гибкий привод, на котором закреплен, по крайней мере, один зонд неразрушающего контроля, причем гибкий привод кинематически связан с внешним приводом, а направляющие гибкого привода, выполнены с возможностью обеспечения движения гибкого привода и закрепленного на нем зонда неразрушающего контроля вдоль видимой части поперечного контура рельса.
В одном из вариантов выполнения устройства гибкий привод выполнен в виде цепного привода.
В одном из вариантов выполнения устройства внешний привод выполнен в виде цепного механизма ручного привода, связанного через редуктор с цепью сканирующего модуля.
В одном из вариантов выполнения устройства внешний привод цепи сканирующего модуля выполнен в виде мотор-редуктора.
В одном из вариантов выполнения устройства, по крайней мере, один сканирующий модуль подвижно закреплен на направляющих, расположенных вдоль рельса и неподвижно закрепленных, по крайней мере, на двух фиксирующих опорах.
В одном из вариантов выполнения устройства, фиксирующие опоры выполнены с возможностью их вертикального перемещения с целью компенсации вертикального износа рельса и обеспечения траектории движения зонда неразрушающего контроля вдоль поперечного контура рельса.
В одном из вариантов выполнения устройства вертикальное перемещение фиксирующих опор осуществляется с помощью регулировочных винтов.
В одном из вариантов выполнения устройства сканирующий модуль с помощью винтовой передачи, выполненной с внешним приводом, соединен, по крайней мере, с одной фиксирующей опорой, с возможностью перемещения вдоль направляющих.
В одном из вариантов выполнения устройства внешний привод винтовой передачи выполнен в виде ручного привода.
В одном из вариантов выполнения устройства внешний привод винтовой передачи выполнен в виде мотор-редуктора.
В одном из вариантов выполнения устройство обеспечивает движение зонда неразрушающего контроля по траектории вдоль видимой части поперечного контура рельса с обеспечением егоплотного прилегания к поверхности рельса.
В одном из вариантов выполнения, устройство выполнено с возможностью обеспечения движения зонда неразрушающего контроля по траектория вдоль поперечного контура рельса с обеспечением акустического контакта с поверхностью рельса.
В одном из вариантов выполнения, зонды неразрушающего контроля для обеспечения непрерывного акустического контакта расположены в подпружиненных вилках.
Предпочтительно выполнения устройства, по крайней мере, с двумя энкодерами.
В одном из вариантов выполнения устройства, по крайней мере, один зонд неразрушающего контроля выполнен ультразвуковым.
В одном из вариантов выполнения устройства, по крайней мере, один зонд неразрушающего контроля выполнен вихретоковым.
В одном из вариантов выполнения устройства, по крайней мере, один зонд неразрушающего контроля выполнен магнитным.
В одном из вариантов выполнения устройства, по крайней мере, один зонд неразрушающего контроля выполнен оптическим.
В одном из вариантов выполнения устройство выполнено с двумя сканирующими модулями, в которых концы винтовых передач модулей связаны муфтой с возможностью независимого или одновременного вращения.
Установка заявляемого устройства на поверхность рельса, обеспечивающего механическое перемещение одного и более зондов неразрушающего контроля по профилю железнодорожного рельса в продольном и поперечном направлениях с помощью линейного привода вдоль продольной оси рельса и гибкого привода по контуру рельса, позволяет провести дефектоскопию всего сечения рельса сложного по форме объекта, каковым является рельс, и тем самым повысить скорость контроля, достоверность обнаружения и оценки результатов контроля.
Сущность полезной модели поясняется чертежами.
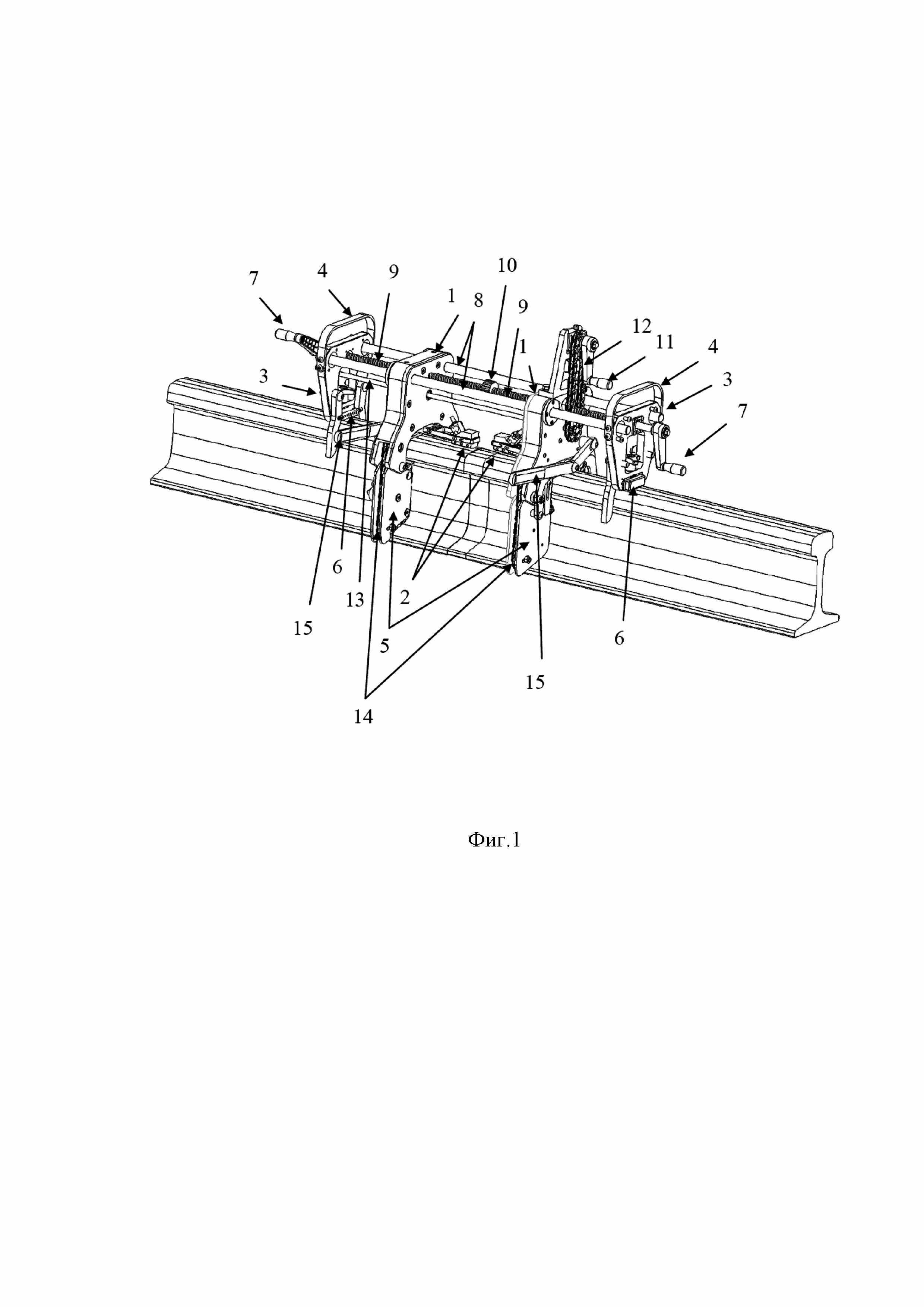
На фиг. 1 показан общий вид устройства, содержащего два сканирующих модуля, в сборе с двумя зондами неразрушающего контроля.
1 - сканирующий модуль;
2 - блок зонда неразрушающего контроля;
3 - фиксирующие опоры;
4 - ручки для установки и переноса сканера;
5 - направляющие цепной передачи,
6 - компенсаторы вертикального износа рельса;
7 - рукоятка привода продольного перемещения;
8 - направляющие продольного перемещения сканирующих модулей;
9 - вал шарико-винтовой передачи;
10 - соединительная муфта;
11 - рукоятка привода поперечного перемещения зондов;
12 - цепной механизм привода редуктора поперечного перемещения блоков зондов;
13 – приводная ось вращения;
14 – цепная передача для перемещения зонда неразрушающего контроля.
15 – рычажный механизм для разведения направляющих цепной передачи.
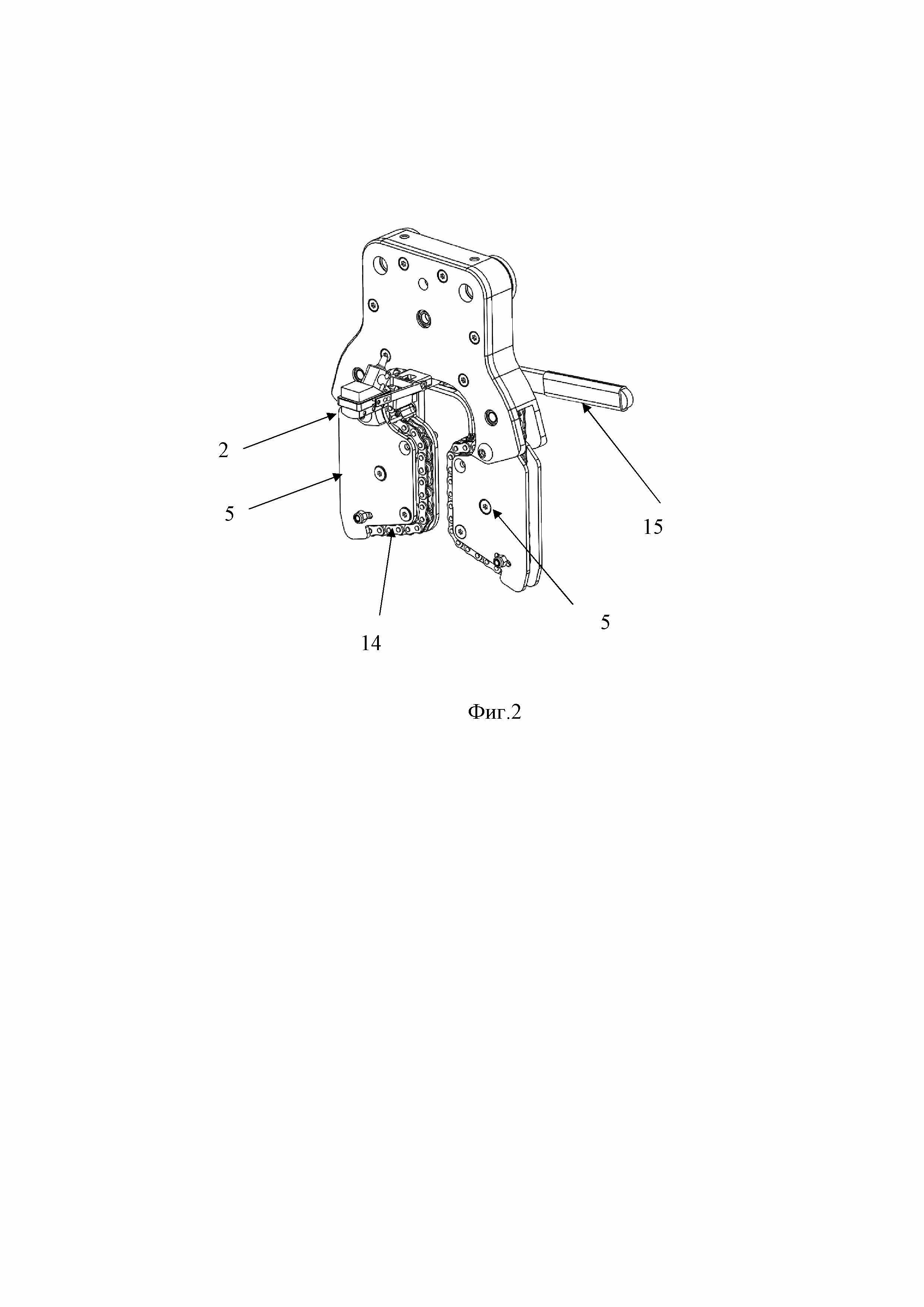
На фиг. 2 показан сканирующий модуль.
На фиг. 3 показана фиксирующая опора.
Полезная модель может быть реализована в устройстве, которое содержит два сканирующих модуля 1, с блоками зондов неразрушающего контроля 2, расположенными в подпружиненных вилках для обеспечения непрерывного акустического контакта, направленными друг к другу, в каждом из которых находится по одному многоэлементному УЗ-преобразователю на фазированных решетка, направленному к оси шва, фиксирующие опоры 3 позволяющие отневелировать сканирующие модули по горизонтали, механизма линейного перемещения по оси рельса и блоков зондов неразрушающего контроля 2 по контуру рельса. В состав устройства также входят ручки 4, с помощью которых устройство может переноситься и устанавливаться на фиксирующие опоры 3 над исследуемым сварным стыком железнодорожных рельсов. В составе устройства выполнены направляющие цепной, передачи 5, выполненные с возможностью разведения с помощью рычажного механизма 15 при установке устройства на рельс. В фиксирующих опорах 3 содержатся компенсаторы вертикального износа рельса 6, для регулировки, при необходимости, прилегания направляющих цепной, передачи 5 к перьям подошвы рельсов. Рукоятки приводов продольного перемещения 7, по направляющим продольного перемещения сканирующих модулей 8, с помощью валов шарико-винтовых передач 9, соединенных муфтой 10, обеспечивающей возможность их независимого или одновременного вращения, предназначены для независимой установки сканирующих модулей 1 в положения, при котором клеммные болты рельса не будут мешать прилеганию сканирующих модулей 1 к рельсу, а также располагать зонды 1 по отношению друг к другу. Рукоятка привода поперечного перемещения 11 через цепной механизм 12 и приводную ось вращения 13 связывающую цепные передачи 14 сканирующих модулей 1, что обеспечивает синхронное перемещение с блоков зондов неразрушающего контроля 2 в направлении поперечном к рельсу.
Устройство работает следующим образом. С помощью ручек 4 устройство переносится и устанавливается на исследуемый сварной стык, или иное конкретное место в железнодорожных рельсах на фиксирующие опоры 3. При этом направляющие цепной, передачи 5 предварительно разведены с помощью рычажного механизма 15. После установки устройства на рельс их сводят с помощью рычажного механизма 15, и с помощью компенсаторов вертикального износа 6, при необходимости, регулируют прилегание направляющих цепной передачи 5 к перьям подошвы рельсов. Рукоятками привода продольного перемещения 7, по направляющим 8 независимо выставляют сканирующие модули 1 в положения, при котором клеммные болты не мешают прилеганию зондов неразрушающего контроля 2 сканирующих модулей 1 к рельсу. Рукояткой привода поперечного перемещения 11 через цепной механизм привода редуктора поперечного перемещения 12 перемещают блоки зондов неразрушающего контроля 2 в поперечном рельсу направлении.
Таким образом, достигается технический результат полезной модели, поскольку с помощью механизма продольного перемещения возможно изменение положения зондов относительно оси объекта контроля, а комбинируя управление приводами продольного и поперечного перемещения можно задать любую траекторию сканирования исследуемой области рельса, причем зонды неразрушающего контроля можно перемещать вдоль рельса и/или вдоль контура рельса (не перемещая при этом устройство и не меняя положение устройства на рельсе), что позволяет повысить скорость контроля, достоверность обнаружения и оценки результатов.
Реферат
Использование: для профилометрии и неразрушающего контроля. Сущность полезной модели заключается в том, что устройство для неразрушающего контроля и профилометрии рельсов содержит, по крайней мере, один сканирующий модуль, при этом устройство выполнено с возможностью установки и фиксации на конкретное место в железнодорожных рельсах, содержит направляющие, выполненные с возможностью перемещения по ним вдоль рельса сканирующего модуля в процессе измерений, а также выполнено с возможностью обеспечения перемещения, по крайней мере, одного зонда неразрушающего контроля в процессе измерений вдоль поперечного контура видимой части рельса, причем сканирующий модуль содержит гибкий привод, на котором закреплен, по крайней мере, один зонд неразрушающего контроля, причем гибкий привод кинематически связан с внешним приводом, а направляющие гибкого привода выполнены с возможностью обеспечения движения гибкого привода, и закрепленного на нем зонда неразрушающего контроля вдоль поперечного контура видимой части рельса с обеспечением его плотного прилегания к поверхности рельса. Технический результат: повышение достоверности обнаружения и оценки дефектов. 17 з.п. ф-лы, 3 ил.
Комментарии