Автоматизированная система контроля инвентарных номеров вагонов - RU2682126C1
Код документа: RU2682126C1
Чертежи
Описание
Автоматизированная система контроля инвентарных номеров вагонов предназначена для применения на объектах железной дороги и предприятий, пользующихся услугами железнодорожного транспорта. Использование автоматизированной системы контроля инвентарных номеров вагонов необходимо для решения актуальных задач регулирования и контроля транспортных потоков, при этом распознавание и регистрация инвентарных номеров вагонов позволяют осуществлять мониторинг движения грузов, поиск «потерянных» транспортных единиц и контроль правильности комплектования поездов.
Известна автоматизированная система контроля инвентарных номеров вагонов (АСКИН), поставляемая ОАО НПП «Альфа-Прибор» (Россия, г. Тула), предназначенная для автоматического считывания номеров вагонов пребывающих или отправляющихся составов, их распознавания, формирования справки и ее передачи в АСУ сортировочной станции, где результаты распознавания проверяются на соответствие телеграмме-натурному листу (ТГНЛ) поезда (АСКИН. Автоматизированная система контроля инвентарных номеров вагонов. Буклет ОАО НПП «Альфа-Прибор». 2011 г.).
АСКИН содержит:
- пост считывания с телевизионными камерами, установленными на стойках по разные стороны железнодорожного пути, и комплектом оборудования счета осей вагонов на основе индукционных датчиков;
- сервер распознавания номеров на основе специализированного системного блока;
- АРМ оператора, оснащенные программным обеспечением «Инспектор АСКИН».
К недостатку системы АСКИН следует отнести недостаточную надежность ее работы, обусловленную применением закрепленных на рельсах индукционных датчиков счета осей вагонов, используемых в системе определения порядковых номеров вагонов в поезде. Индукционные датчики имеют определенные недостатки, к которым можно отнести:
-возможность повреждения датчика и обеспечивающего его работу кабельного комплекта различными агрессивными жидкостями (кислоты), топливом и химическими реактивами, которые могут при движении из-за расплескивания вытекать из цистерн через неисправные запорные устройства люков;
-высокая вероятность повреждения при проведении работ по обслуживанию железнодорожных путей (подбивка пути и т.п.).
Выход из строя или пропуск срабатывания указанных датчиков при прохождении над ними колесных осей приводит к нарушению работы подсистемы счета вагонов, неправильному определению порядкового номера вагона в поезде и, соответственно, к нарушению определенного АСКИН соответствия порядкового и инвентарного номеров вагонов. В результате данные по составу, приведенные в сформированной АСКИН справке, будут ошибочны.
Известен комплекс автоматизированного учета вагонооборота (патент РФ 2500562 кл. МПК B61L 25/00). Указанный комплекс содержит две опоры, установленные по обе стороны от контролируемого железнодорожного пути, на которых монтируются телекамеры, связанные с вычислителем, решающим задачу считывания номеров с бортов вагонов, цистерн и платформ. Кроме того, имеются датчики положения вагонов - магнитные, размещенные на рельсах по разные стороны от оси рельсового пути, и оптоэлектронные, включающие в свой состав излучатель и фотоприемник, расположенные на противоположных стойках. Вычислитель комплекса на основе информации с датчиков положения вагонов определяет порядковый номер вагона, находящегося перед телекамерами, и обеспечивает привязку порядкового номера вагона и его инвентарного номера. Программное обеспечение вычислителя обеспечивает:
- получение, обработку и хранение изображений подвижных единиц в составах поездов;
- автоматическое считывание и распознавание (идентификацию) инвентарных номеров вагонов;
- передачу обработанных данных в информационную сеть железной дороги.
Исключение из процесса считывания номеров вагонов использования ручного списывания номеров оператором позволяет существенно повысить эффективность работы персонала и снизить число сотрудников, задействованных в процессе обработки поездов.
Недостатки рассмотренного комплекса, принятого за прототип, состоят в следующем:
- возможность повреждения магнитных датчиков и обеспечивающего их работу кабельного комплекта различными агрессивными жидкостями (кислоты), топливом и химическими реактивами, которые могут при движении из-за расплескивания вытекать из цистерн через неисправные запорные устройства люков;
- высокая вероятность повреждения магнитных датчиков при проведении работ по обслуживанию железнодорожных путей (подбивка пути и т.п.);
- низкая надежность работы оптоэлектронных датчиков, выполненных в виде разнесенных оптоэлектронных пар, связанная с возможностью относительного смещения расположенных на противоположных опорах излучателя и фотоприемника при эксплуатации системы, а также при проведении работ на рельсовом пути;
- отсутствие в системе встроенного контроля корректности счета вагонов.
Указанные недостатки могут привести к нарушению работы счета вагонов, неправильному определению порядкового номера вагона в поезде и, соответственно, к нарушению определенного комплексом соответствия порядкового и инвентарного номеров вагонов. В результате переданные в информационную сеть железной дороги данные о составе будут ошибочны.
Целью предлагаемого изобретения является устранение указанных недостатков прототипа, а именно повышение как надежности работы устройства, так и достоверности формируемых им данных о составе.
Указанная цель достигается тем, что наряду с имеющимися опорами, установленными по разные стороны железнодорожного пути, размещенными на них телевизионными камерами, системным блоком автоматизированного рабочего места оператора с монитором, причем телевизионные камеры связаны с соответствующими входами системного блока, имеется установленный на одной из опор лазерный дальномер, выход которого через цифровой компаратор, свободный вход которого соединен с блоком ввода дальности, соединен с системным блоком, причем лазерный дальномер установлен под углом к горизонтальной плоскости перпендикулярно оси железнодорожного пути выше рам вагонов таким образом, что его ось проходит над сцепкой и находится на уровне удаленного по отношению к нему угла рамы вагона, имеются установленные на опорах третья и четвертая телевизионные камеры, выходы которых как непосредственно, так и через контроллеры распознавания и счета колесных тележек соединены со входами системного блока.
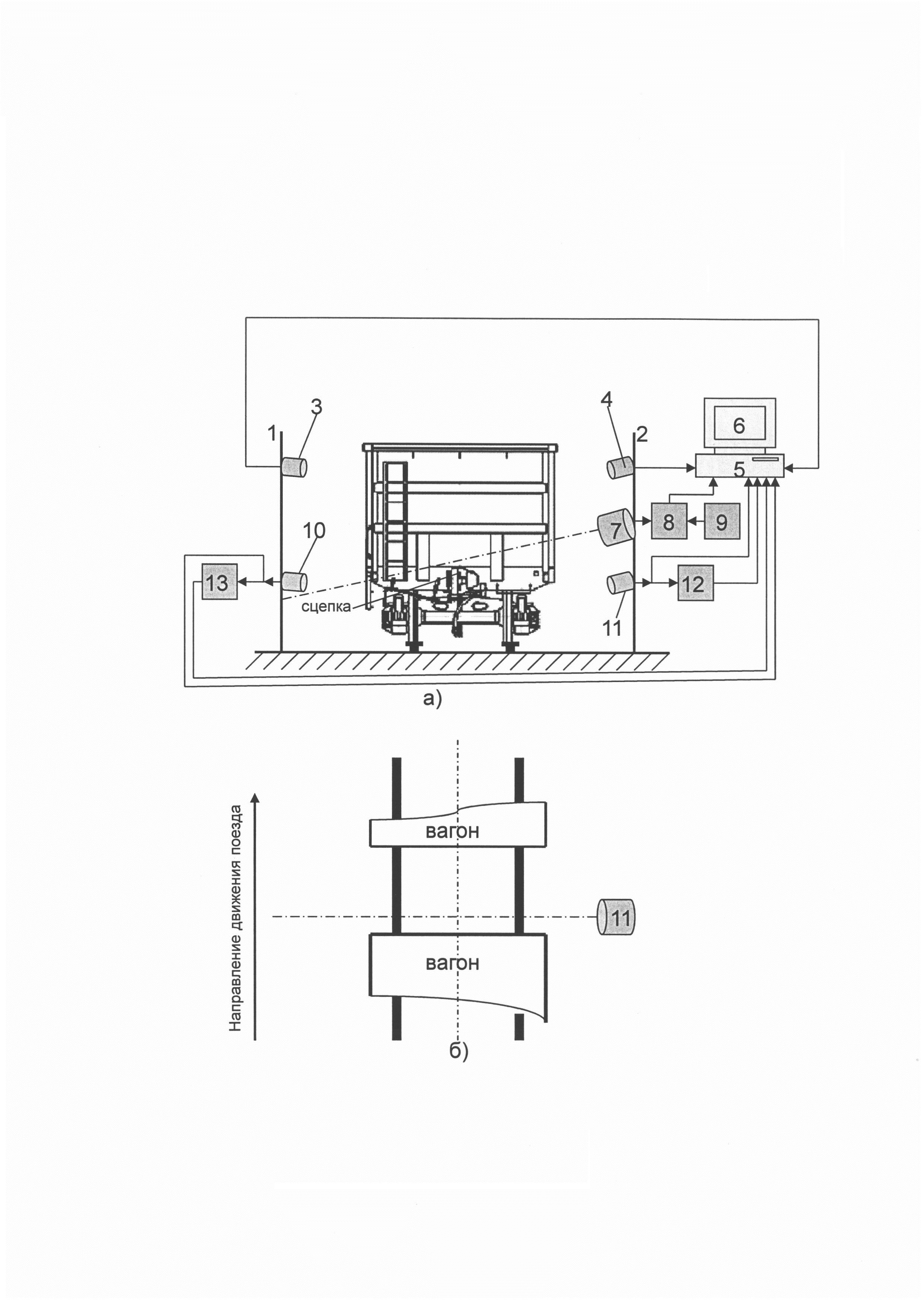
Сущность предлагаемого изобретения поясняется на фигуре, где приведена структурная схема устройства с построениями, поясняющими геометрические особенности расположения лазерного дальномера.
Показанное на фигуре (вид а) устройство содержит установленные по разные стороны рельсового пути опоры 1 и 2, размещенные на них первую 3 и вторую 4 телевизионные камеры обзора правого и левого борта, системный блок 5 автоматизированного рабочего места оператора с монитором 6, при этом телевизионные камеры 3 и 4 связаны с соответствующими входами системного блока 5. Кроме того, имеется установленный на одной из опор лазерный дальномер 7, выход которого через цифровой компаратор 8, свободный вход которого соединен с блоком ввода дальности 9, соединен с системным блоком 5, причем лазерный дальномер 7 установлен под углом к горизонтальной плоскости перпендикулярно оси железнодорожного пути на уровне выше рам вагонов таким образом, что его ось проходит над сцепкой и находится на уровне удаленного по отношению к нему угла рамы вагона, имеются установленные на опорах 1 и 2 третья 10 и четвертая 11 телевизионные камеры, выходы которых как непосредственно, так и через контроллеры 12 и 13 распознавания и счета колесных тележек соединены со входами системного блока 5.
При реализации изобретения могут быть использованы следующие технические решения. В качестве опор 1 и 2 могут быть использованы стойки типовой железнодорожной фермы, например, используемой при размещении комплекта телекамер системы АСКО ПВ производства ПК «НПК «Автоматизация». В качестве телевизионных камер 3, 4, 10, 11 можно использовать камеры на основе приборов с зарядовой связью (ПЗС-матриц), размещенные в герметичных термостатированных кожухах. В качестве системного блока 5 можно использовать типовой компьютер с соответствующим программным обеспечением и многоканальным видеовходом, обеспечивающим видеозахват телевизионных сигналов. Специализированное программное обеспечение выполняет следующие функции:
- распознавание инвентарных номеров вагонов по видеоизображениям;
- создание базы данных распознавания и изображений бортов вагонов;
- создание видеоархива состава;
- экспорт результатов распознавания и видеоизображений вагонов в АСУ железной дороги.
Монитор 6 - жидкокристаллический монитор, например, типа ВМЦ - 38.8 со встроенным динамиком. В качестве лазерного дальномера 7 можно использовать дальномер непрерывного действия с цифровым выходом, например, Lidar Life v3HP. В качестве цифрового компаратора 8 можно использовать программируемый контроллер. Блок ввода дальности 9 может быть реализован на основе репрограммируемого цифрового запоминающего устройства, например, на специализированных цифровых схемах хранения цифровой информации, например, со стиранием информации УФ-излучением при перепрограммировании. Кроме того, цифровой компаратор 8 и блок ввода дальности 9 могут быть реализованы на ПЭВМ. Контроллеры 12 и 13 распознавания и счета колесных тележек также могут быть реализованы на ПЭВМ с соответствующим программным обеспечением.
Лазерный дальномер 7 предназначен для фиксации на контрольном участке момента прохода первого вагона, промежутка между вагонами и момента входа очередного вагона на указанный участок. Для этого луч дальномера 7 должен перекрываться вагоном при пересечении им вертикальной плоскости, проходящей через опоры 1 и 2 и находиться в таком состоянии все время нахождения вагона в контролируемом створе. Для обеспечения выполнения данного требования дальномер 7 располагается в плоскости створа опор 1 и 2 под углом относительно силуэта вагона. Такое расположение лазерного дальномера 7 позволяет обеспечить надежное перекрытие лазерного луча в случае, когда вагон (платформа) не имеет бортов, а груз занимает малую площадь пола. При этом гарантируется прохождение лазерного луча в просвете между вагонами, независимо от вида и габаритов сцепки.
Работа устройства происходит следующим образом. При отсутствии состава или при нахождении в створе опор 1 и 2 промежутка между вагонами лазерный луч дальномера 7 отражается от опоры 1 и возвращается на фотоприемник дальномера 7, в результате чего на его выходе формируется цифровой сигнал, соответствующий дальности Д до опоры 1. Указанный сигнал поступает на цифровой компаратор 8, на который с блока ввода дальности 10 постоянно поступает цифровой сигнал, соответствующий дальности Д. В результате цифровой компаратор 8 формирует цифровой сигнал совпадения, соответствующий отсутствию вагона в контролируемом створе, и он поступает на системный блок 5, который определяет порядковый номер вагона в составе в зависимости от зарегистрированного количества прошедших промежутков между вагонами. Если вагон перекрывает контролируемый створ опор 1 и 2, лазерный луч дальномера 7 отражается от его поверхности. При этом лазерный дальномер 7 начинает регистрировать дальность, отличную от Д, цифровой компаратор 8 формирует цифровой сигнал несовпадения с цифровым сигналом с блока ввода дальности 9, соответствующий наличию вагона, и он поступает на системный блок 5, фиксирующий вход следующего вагона на контрольный участок. При прохождении в контролируемом створе следующего промежутка между вагонами цифровой компаратор 8 вновь формирует цифровой сигнал совпадения с цифровым сигналом с блока ввода дальности 9. При этом системный блок 3 фиксирует окончание прохода вагона. При входе в створ следующего вагона цифровой компаратор 8 вновь формирует цифровой сигнал несовпадения с цифровым сигналом с блока ввода дальности 9, соответствующий наличию вагона, и он поступает на системный блок 3, который фиксирует появление следующего вагона. По мере прохождения состава работа канала счета вагонов повторяется. При этом системный блок 5 впечатывает порядковые номера вагонов в соответствующие им видеоизображения, записываемые на жесткий диск, а в информационном окне формируется инвентарный номер вагона, определенный по видеоизображениям с телекамер 3 и 4.
Одновременно в устройстве осуществляется автоматический контроль правильности счета вагонов. Видеосигналы с телевизионных камер 10 и 11 поступают на контроллеры 12 и 13 распознавания и счета колесных тележек, которые при попадании в поле зрения телевизионных камер 10 и 11 колесных тележек формируют соответствующие сигналы, подающиеся в системный блок 5, который на основе их подсчета определяет соответствующие порядковые номера проходящих вагонов, которые сопоставляются с данными, получаемыми от лазерного дальномера 7, тем самым значительно повышая достоверность подсчета вагонов в составе.
Отсутствие необходимости использования разнесенных в пространстве на значительное расстояние оптоэлектронных пар, требующих высокоточной взаимной установки и весьма чувствительных к внешним воздействиям, вызывающим их разъюстировку и потерю работоспособности, а также индукционных датчиков, чувствительных к воздействию агрессивных сред и повреждениям во время обслуживания рельсового пути, в совокупности с наличием автоматического самоконтроля корректности работы системы по подсчету вагонов значительно повышает надежность работы заявляемой автоматизированной системы контроля инвентарных номеров вагонов по сравнению с известными аналогами и достоверность формируемых этой системой результатов, обеспечивая при этом высокую степень соответствия идентифицированных инвентарных номеров и порядковых номеров вагонов в составе.
Реферат
Изобретение относится к железнодорожной автоматике для контроля инвентарных номеров вагонов. Система содержит установленные по разные стороны рельсового пути опоры с размещенными на них телевизионными камерами обзора правого и левого борта, системный блок автоматизированного рабочего места оператора с монитором, при этом телевизионные камеры связаны с соответствующими входами системного блока. Дополнительно система имеет установленный на одной из опор лазерный дальномер, выход которого через цифровой компаратор, свободный вход которого соединен с блоком ввода дальности, соединен с системным блоком, причем лазерный дальномер установлен под углом к горизонтальной плоскости перпендикулярно оси железнодорожного пути выше рам вагонов таким образом, что его ось проходит над сцепкой и находится на уровне удаленного по отношению к нему угла рамы вагона, имеются установленные на опорах телевизионные камеры обзора колесных тележек правого и левого борта, выходы которых как непосредственно, так и через контроллеры распознавания и счета колесных тележек соединены со входами системного блока. Достигается повышение надежности и достоверности формируемых данных системы. 1 ил.
Комментарии