Рельсовая тележка осаживателя - RU2676861C2
Код документа: RU2676861C2
Чертежи
Описание
Область техники, к которой относится изобретение
Данное изобретение относится к устройству для перемещения на рельсовом ходу подвижных единиц без собственного привода или без помощи собственного привода с электромоторным приводным элементом, который может управляться сигналами частотного преобразователя или инвертора, с приводным валом и с приводным тросовым шкивом, который передает приводное усилие, необходимое для перемещения подвижной единицы, на тяговый трос.
Под термином «подвижные единицы» следует понимать в частности рельсовый подвижный состав или вагоны на сортировочных или погрузочных путях (так называемые «парки путей в виде арфы») или на рельсах, ведущих через линии для автоматической мойки, покрасочно-лакировальные цеха, пункты погрузки и разгрузки или помещения для технического обслуживания такого рельсового подвижного состава.
Уровень техники
Устройства указанного в начале типа известны под термином «тележка осаживателя» в частности, но не исключительно как составная часть системы сортировочных устройств для железнодорожных вагонов. Они применяются, например, для формирования грузовых вагонов с обеспечением полностью укомплектованных, готовых к сцеплению составов поездов. Их задача заключается в том, чтобы осуществлять перемещение вагонов на определенном участке пути устройств для формирования поездов без собственного привода подвижной единицы и без использования маневренного локомотива. При этом в большинстве случаев на одном или нескольких сортировочных путях парка путей в виде арфы несколько тележек осаживателя используются по отдельности или с поэтапным распределением по участкам и приводятся в движение средствами тросовой тяги. Эти средства тросовой тяги оснащены, как правило, вращающимся тяговым тросом, к которому подсоединена тележка осаживателя и который приводится в движение электромоторным приводным элементом с фрикционным стопорением посредством приводного тросового шкива.
Обращаясь к тому же примеру с использованием систем сортировочных устройств для железнодорожных вагонов, тележка осаживателя с целью захвата перемещаемых вагонов оборудована транспортными рычагами, на концах которых находятся тяговые ролики, приводимыми в передающее тяговое усилие зацепление по меньшей мере с одним гребнем бандажа колеса вагона для обеспечения перемещения вагона. При этом транспортные рычаги большей частью исполнены с возможностью их выдвижения и ввода. Для привода в движение перемещаемого вагона транспортные рычаги стопорятся в выдвинутом положении, которое приводит их в зацепление с колесной парой по направлению транспортировки.
В публикации EP 0413337 A1 раскрыт электромоторный прямой привод для колес подвижных единиц, в частности, для колес рельсовых подвижных единиц, отличающийся тем, что в осевом направлении, рядом с приводимым в перемещение колесом, расположен электродвигатель с электронной коммутацией, ротор которого подсоединен к приводимому в движение колесу для передачи вращающего момента. При этом оси вращения ротора и приводимого в перемещение колеса располагаются по одной линии, по крайней мере, в основном так, что статор электродвигателя удерживается без возможности вращения на транспортном средстве на стороне, отдаленной от приводимого в движение колеса. Такой тип прямых приводов применяется преимущественно в высокоскоростных рельсовых подвижных единицах в диапазоне скорости от 200 км/ч, в которых большое допустимое ускорение при разбеге не имеет приоритетного значения. Соответствующим образом эти прямые приводы установлены стационарно в рельсовой подвижной единице или на ней. Из финансовых соображений до сих пор не имеет смысла оснащать таким приводом подвижные единицы без собственной силовой установки, например, грузовые вагоны.
Из публикации DE 2735616 В1 известно, например, устройство для перемещения железнодорожных вагонов посредством размещенной между рельсами пути, перемещаемой вперед и назад в направлении пути тележки осаживателя с ведомой тросовой тягой. Эта тележка осаживателя соединена тросовыми зажимами с вращающимся тяговым тросом, причем перемещение тележки осаживателя осуществляется посредством движения тягового троса, для чего применяется приводной элемент, не представленный в этом печатном издании.
Аналогичное устройство показано в публикации DE 10223561 A1, в которой показаны способ и схема для отвода и ввода транспортных рычагов на тележке осаживателя, перемещаемой посредством тягового троса. В отличие от данного изобретения, в основу этого изобретение была положена задача создать способ и схему, обеспечивающие отвод транспортных рычагов, а также их ввод без дополнительных устройств, предназначенных для передачи энергии или усилия, за счет одного лишь наличия тягового троса в любом положении тележки осаживателя на пути. При этом привод в движение тележки осаживателя на тяговом тросе осуществляется посредством асинхронного двигателя трехфазного тока с промежуточной передачей, причем асинхронный двигатель трехфазного тока управляется частотным преобразователем. Между передачей и асинхронным двигателем трехфазного тока расположен стояночный тормоз. В рамках взаимодействия частотного преобразователя, а также стояночного тормоза надлежит таким образом обеспечить настройку ступенчатых пилообразных функций различной величины для ускорения и торможения тележки осаживателя в состоянии без нагрузки.
Однако на практике такая схема оказалась не работающей, а также подверженной выходу из строя и сбоям в частности в отношении таких узлов как стояночный тормоз, что дополнительно подтверждается недостатком примеров использования, реализованных на практике.
По этой причине задачей настоящего изобретения является усовершенствование устройства для перемещения на рельсовом ходу подвижных единиц без собственного привода или без помощи собственного привода указанного в начале типа таким образом, чтобы обеспечивались как упрощенная, а тем самым более экономичная конструкция, так и меньшая подверженность сбоям и меньшая необходимость в проведении технического обслуживания.
В соответствии с изобретением данная задача решается посредством устройства для перемещения на рельсовом ходу подвижных единиц без собственного привода или без помощи собственного привода с электромоторным приводным элементом, который может управляться сигналами частотного преобразователя или инвертора, с приводным валом и приводным тросовым шкивом, который передает приводное усилие, необходимое для перемещения подвижной единицы, на тяговый трос, причем электромоторный приводной элемент и приводной тросовый шкив напрямую соединены между собой приводным валом так, что электромоторный приводной элемент напрямую и непосредственно передает приводное усилие на приводной тросовый шкив через приводной вал.
Преимущества устройства согласно изобретению заключаются в частности в том, что возможно отказаться от промежуточной передачи, вследствие чего оптимизируются как стоимость изготовления, так и затраты на техническое обслуживание а также снижается подверженность повреждениям такой рельсовой тележки осаживателя.
Предпочтительные усовершенствования изобретения приводятся в дополнительных пунктах формулы изобретения.
Для получения информации о частоте вращения приводного вала целесообразно регистрировать частоту вращения приводного вала. Так, например, предусмотрено, что устройство имеет датчик импульсов для регистрации частоты вращения приводного вала.
Предпочтительным образом предусмотрено, что датчик импульсов подсоединяется напрямую к частотному преобразователю или инвертору. Отсюда вытекает то преимущество, что датчик импульсов может напрямую передавать сигналы, в частности касающиеся частоты вращения, в частотный преобразователь или инвертор. Кроме того, на основании частоты вращения приводного вала возможно посредством частотного преобразователя или инвертора осуществлять прямое управление и регулирование электромоторного приводного элемента.
В качестве альтернативного или дополнительного варианта возможно реализовать оснащение устройства измерительным элементом, который принимает от датчика импульсов сигнал, соответствующий частоте вращения приводного вала. На базе этого сигнала, в частности на основании полученной за счет этого информации о частоте вращения приводного вала и соединенной с ним тележки осаживателя, возможно таким образом постоянно и предпочтительно делать вывод о положении тележки осаживателя в установке. Предпочтительным образом предусматривается регулирующий и управляющий блок, который принимает выходной сигнал измерительного элемента, сопоставляет этот сигнал с задаваемым заданным значением и генерирует разностный сигнал, который базируется на сопоставлении выходного сигнала измерительного элемента с предписанным заданным значением и который подается в частотный преобразователь или инвертор. Этот разностный сигнал возможно использовать разнообразным способом. Так, например, отсюда вытекает преимущество, что по разнице между частотой вращения и заданным значением возможно сделать вывод о нагрузке, свойствах нагрузки и о характеристиках нагрузки на регулируемом объекте с перемещаемыми транспортными средствами при помощи управляемых физических величин - частоты вращения и вращающего момента. При этом под «нагрузкой» понимаются груз и тара одной или нескольких подвижных единиц, причем она включает в себя потери вследствие трения и износа, о которых возможно сделать вывод математически, используя данные подвижной единицы о грузе и таре в упрощенной форме частного. Далее, может распознаваться так называемое перемещение с блокированием. Под термином «перемещение с блокированием» понимают блокирование как блокировку, в процессе которой перемещаемая подвижная единица наталкивается на препятствие. Существенное преимущество возникает на конечном этапе размещения готовых к сцеплению подвижных единиц на участках устройств для формирования поездов за счет того, что отдельные вагоны и мотор-вагонные секции могут двигаться до нулевой частоты вращения электромоторного приводного элемента и с сохранением требуемого вращающего момента при номинальной нагрузке. По достижении целевой позиции и после завершения размещения с готовностью к сцеплению возможно медленно уменьшить вращающий момент при номинальной нагрузке, а тем самым тяговое усилие. Это дает то преимущество, что усилия нажатия буферов сцепок подвижных единиц медленно уменьшаются и что предупреждаются нежелательные изменения положения вагонов вследствие усилий нажатия буферов. Далее, регулирующий и управляющий блок в состоянии свободно и плавно задавать выбираемые скорости перемещения вперед и назад транспортной установки. Тем самым обеспечивается возможность ускорения и перемещения отдельных вагонов и мотор-вагонных секций без эффекта катапультирования.
Далее, возможна передача управляющего сигнала от частотного преобразователя или инвертора в электромоторный приводной элемент для управления частотой вращения и вращающим моментом. Таким образом частотный преобразователь или инвертор могут из имеющегося в распоряжении переменного напряжения, предпочтительно трехфазного переменного напряжения, генерировать изменяемые по частоте и амплитуде значения переменного напряжения для управления электромоторным приводным элементом. Отсюда вытекает то преимущество, что в зависимости от участка пути устройство может эксплуатироваться в различных рабочих режимах, например, для транзита, буксирования вперед и назад, трогания с места и т.д. Наряду с режимом перемещения с правым и левым ходом возможно реализовать также режим генератора, дающий возможность целенаправленно тормозить находящиеся в движении подвижные единицы, например, после сортировочной горки или на сортировочной горке.
В рамках взаимодействия с регулирующим и управляющим блоком далее реализуется закрытый контур регулирования, который обеспечивает все преимущества контура регулирования, например, устойчивость и уменьшение величин возмущающего воздействия.
В частности возможно, что датчик импульсов исполнен в качестве частотного датчика и основывается на оптическом, индуктивном, акустическом или ином, базирующемся на физических величинах способе и который также может состоять из их комбинации. Преимущество такого решения заключается в том, что в зависимости от типа подвижной единицы или в зависимости от требуемых вращающих моментов для перемещения подвижных единиц и обеспечения диапазонов скоростей на регулируемом объекте имеется возможность осуществить как можно более точное измерение частоты вращения и/или вращающего момента.
Относительно выбора измерительного элемента предпочтительные варианты заключаются в том, чтобы исполнить его в качестве оптического, индуктивного, акустического или иного датчика, в частности датчика Холла. Датчики Холла обеспечивают при этом то преимущество, что они в высокой степени нечувствительны по отношению к воздействию загрязнений и воды, если они не содержат ферромагнитных компонентов. Для измерения частоты вращения в виде как можно меньших сегментов и с как можно большей точностью могут использоваться также несколько датчиков, в частности несколько датчиков Холла. В качестве измерительного элемента могут использоваться также тахогенератор или инкрементальный датчик, которые имеют то преимущество, что они могут охватывать высокую частоту импульсов. Это может иметь значение тогда, когда требуется высокая точность при измерении низкой частоты вращения.
Особо предпочтительным образом предусмотрено, что регулирующий и управляющий блок или же частотный преобразователь или инвертор имеют не менее одного пропорционально-интегрального регулятора. Однако возможно предусмотреть и комбинацию из регулирующих звеньев, обусловленных случаем применения и типом подвижной единицы, а также известными в технике исполнениями. Однако пропорционально-интегральный регулятор обладает в частности тем преимуществом, что могут обеспечиваться быстрая реакция и точная регулировка с доводкой до требуемых заданных состояний в отношении передаваемых частоты вращения и/или вращающего момента.
Выпрямители тока являются электронными приборами без приводимых в движение механически компонентов и могут использоваться для регулирования мощности потребителей переменного тока. В соответствии с этим возможно предусмотреть, чтобы частотный преобразователь или инвертор имел исполнение в виде выпрямителя тока и был в состоянии обеспечить достаточную частоту и амплитуду для управления электромоторным приводным элементом и вращающие моменты, необходимые для перемещения тяжелых подвижных единиц. Согласно уровню техники на сегодняшний день и с учетом распространенных конфигураций комплексные частотные преобразователи или инверторы еще имеют предел мощности, который может находиться ниже требуемой мощности, отдаваемой соответственно тяжелым подвижным единицам. При использовании выпрямителя тока, например, с отключаемым тиристором (тиристор с запираемым вентилем), преимущество заключалось бы в том, что обеспечивались бы рабочие диапазоны до 600 Вольт и 160 Ампер.
Электромоторный приводной элемент может иметь различные исполнения, что в основном определяется типом подвижной единицы и требуемым воздействием на нагрузку. В соответствии с этим в качестве электромоторного приводного элемента преимущественно используется двигатель с электронной коммутацией, который в частности может иметь исполнение как электродвигатель трехфазного тока, синхронный электродвигатель, асинхронный электродвигатель, реактивный электродвигатель или же как электродвигатель постоянного тока. Однако возможно также предусмотреть использование комбинации двигателей этих типов для различных участков пути и предъявляемых к ним требований относительно транспортного механизма.
Далее, возможно предусмотреть, что устройство имеет стояночный тормоз. В частности, назначение стояночного тормоза в таком исполнении заключается в том, чтобы предупредить вращение приводного вала или, соответственно, в том, чтобы не допустить вращения. Стояночный тормоз располагается предпочтительно вдоль приводного вала и/или соединен с ним напрямую. В качестве опции стояночный тормоз может управляться регулирующим и управляющим блоком. Если движущееся транспортное средство приостанавливается или преднамеренно останавливается, то зачастую оно подвержено воздействию усилий, действующих извне. Такими усилиями могут, например, быть ветровые нагрузки. Для того, чтобы в таком случае снять с устройства нагрузки в виде ненужного объема регулирования, целесообразно использовать стояночный тормоз, действующий на приводной вал. Стояночный тормоз предупреждает вращение приводного вала, приводного тросового шкива и тягового троса. Тем самым стояночный тормоз удерживает тележку осаживателя в ее положении останова. Стояночный тормоз может также служить для того, чтобы предохранить устройство от внешних усилий или перегрузок вследствие нежелательных внешних усилий, например, наталкивающихся засланных вагонов в сортировочных устройствах.
Ниже более подробно посредством чертежа поясняется предпочтительный пример осуществления изобретения.
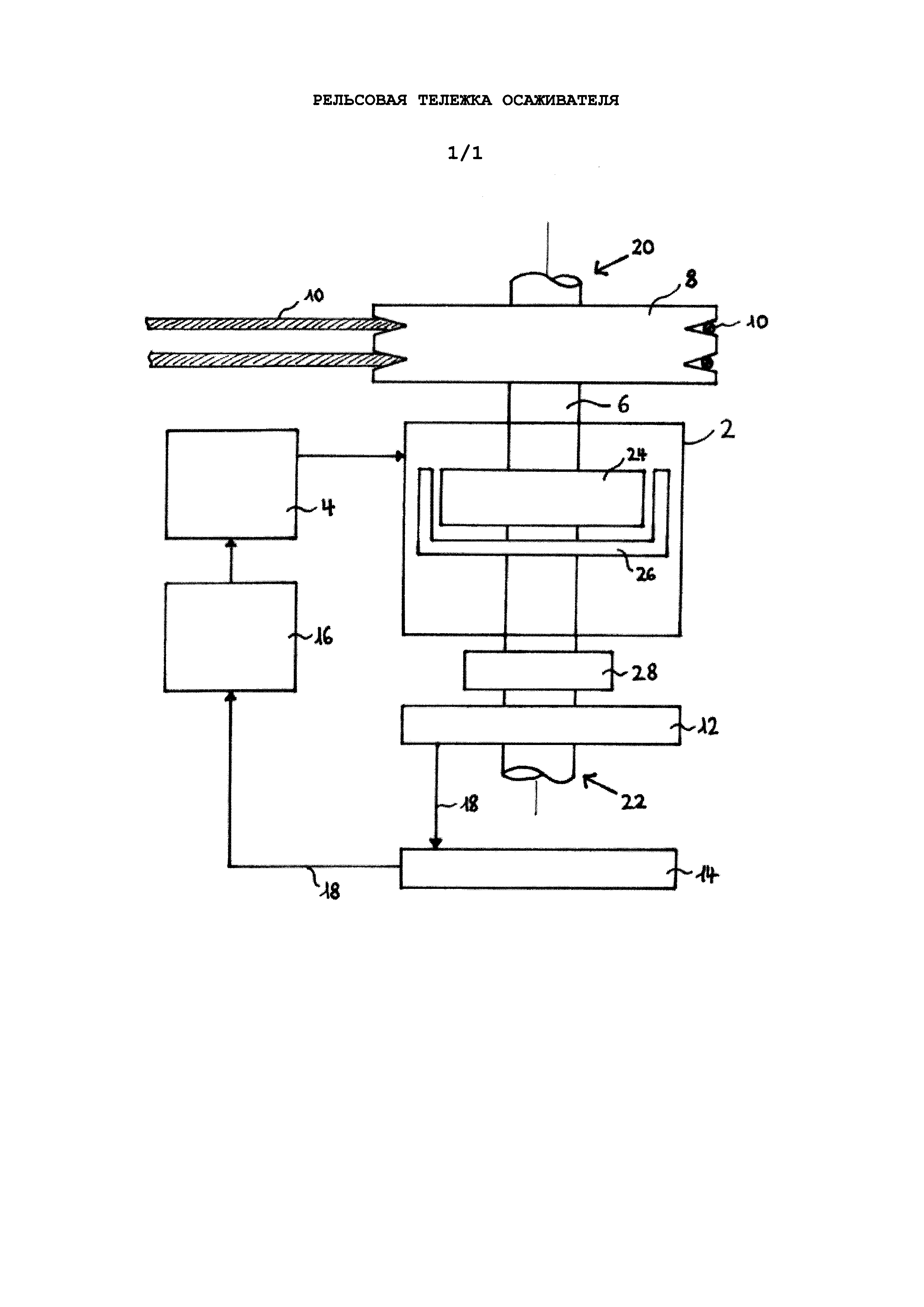
Единственный чертеж показывает схематическое изображение компонентов в примерном примере осуществления устройства в соответствии с изобретением для перемещения на рельсовом ходу подвижных единиц, причем представлены только элементы, существенные для непосредственного понимания изобретения.
Фиг. 1 показывает устройство для перемещения на рельсовом ходу подвижных единиц без собственного привода или без помощи собственного привода с электромоторным приводным элементом (2), с ротором (24) и статором (26), причем электромоторный приводной элемент (2) может управляться сигналами частотного преобразователя или инвертора (4). С этой целью он может располагать одним или несколькими входами, в также одним или несколькими выходами, чтобы могли регистрироваться данные привода. Далее, фиг. 1 показывает приводной вал (6) с приводным тросовым шкивом (8) и с закрепленной за ним стороной А (20), причем электромоторный приводной элемент (2) и приводной тросовый шкив (8) соединены между собой напрямую приводным валом (6). Датчик импульсов (12), который в данном примере закреплен за стороной В (22), однако может также размещаться произвольно на приводном валу (6) или непосредственно на электромоторном приводном элементе (2), регистрирует частоту вращения и передает ее в качестве некоторого вида обратной связи (18) по частоте вращения в измерительный элемент (14). Измерительный элемент (14) соединен с регулирующим и управляющим блоком (16) и в состоянии управлять частотным преобразователем или инвертором (4). Однако возможно реализовать и прямое соединение датчика (12) импульсов с частотным преобразователем или инвертором (4). По приводному тросовому шкиву приводное усилие, необходимое для перемещения подвижной единицы, передается на тяговый трос (10). Посредством не представленных на чертеже датчиков частоты вращения колес в устройствах для формирования поездов обнаруживаются, например, скатившиеся с сортировочной горки подвижные единицы, например, вагоны. При необходимости вызывается пуск тележки осаживателя. Они могут управляться регулирующим и управляющим блоком (16) автоматически в зависимости от подаваемых веса или длины. При контакте транспортного рычага с грузовым вагоном движущее усилие регулируется так, чтобы вагон не ускорялся недопустимым образом в результате возникающего эффекта катапульты. Далее, фиг. 1 показывает стояночный тормоз (28). Стояночный тормоз (28) размещен на приводном валу (6) между электромоторным приводным элементом (2) и датчиком (12) импульсов. Стояночный тормоз (28) в состоянии предохранить устройство от внешних нагрузок, в частности от перегрузок. Он служит в частности для того, чтобы удерживать тележку осаживателя в требуемом положении останова. Нагрузка с регулирующего и управляющего блока (16) может сниматься стояночным тормозом (28). Стояночный тормоз (28) служит для того, чтобы притормозить, в частности предотвратить вращение приводного вала (6).
Перечень условных обозначений
2 Электромоторный приводной элемент
4 Частотный преобразователь или инвертор
6 Приводной вал
8 Приводной тросовый шкив
10 Тяговый трос
12 Датчик импульсов
14 Измерительный элемент
16 Регулирующий и управляющий блок
18 Обратная связь по частоте вращения
20 Сторона А
22 Сторона В
24 Ротор
26 Статор
28 Стояночный тормоз
Реферат
Устройство для перемещения на рельсовом ходу подвижных единиц без собственного привода или без помощи собственного привода имеет электромоторный приводной элемент (2), который может управляться сигналами частотного преобразователя или инвертора (4), с приводным валом (6) и с приводным тросовым шкивом (8), который передает приводное усилие, необходимое для перемещения подвижной единицы, на тяговый трос (10). Электромоторный приводной элемент (2) и приводной тросовый шкив (8) напрямую соединены между собой приводным валом (6) так, что электромоторный приводной элемент (2) передает приводное усилие напрямую и непосредственно на приводной тросовый шкив (8) через приводной вал (6). Обеспечивается простая конструкция устройства, так и меньшая подверженность сбоям и меньшая необходимость в проведении технического обслуживания. 11 з.п. ф-лы, 1 ил.
Комментарии