Способ и устройство управления для определения длины, по меньшей мере, одного участка пути - RU2562477C1
Код документа: RU2562477C1
Чертежи
Описание
В связи с эксплуатацией и управлением сооружениями для обеспечения железнодорожных перевозок по разным причинам может потребоваться или может быть целесообразным определение длины одного или нескольких участков пути. Это относится, в частности, к управлению маневровыми работами на сортировочных горках, поскольку здесь точное знание длины участков пути, по которым скатываются единицы подвижного состава, имеет большое значение для надежного и эффективного управления сооружением. Так, например, длина участков пути между вагонными замедлителями сортировочной горки является важной входной величиной для прогнозирования характеристики время-путь скатывающихся единиц подвижного состава и, тем самым, для максимально эффективного и одновременно надежного управления всей сортировочной горкой.
В принципе, возможность определения длины участков пути заключается в их оптическом измерении, например, в начале проекта. Эти действия имеют, однако, тот недостаток, что, в частности, измерение эффективных длин кривых через стрелки и замедлители подвержено ошибкам и, тем самым, соответствующие результаты измерений являются сравнительно неточными.
В основе изобретения лежит задача создания особенно производительного и одновременно сравнительно легко реализуемого способа определения длины, по меньшей мере, одного участка пути.
Эта задача решается, согласно изобретению, посредством способа определения длины, по меньшей мере, одного участка пути, при котором регистрируются сообщения о прохождении, вызванные прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством и созданные ограничивающими соответствующий участок пути рельсовыми контактами, а также определяются скорость рельсового транспортного средства и длина, по меньшей мере, одного участка пути с учетом временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости.
Предложенный способ позволяет использовать предпочтительным образом тот факт, что участки пути, длину которых следует определить, на практике зачастую ограничены рельсовыми контактами. При этом соответствующие рельсовые контакты могут представлять собой, например, такие, которые служат для измерения скорости или подтверждения присутствия рельсовых транспортных средств. В рамках предложенного способа любые датчики, подходящие для обнаружения отдельных колес или осей рельсовых транспортных средств, называются рельсовыми контактами. В отношении принципа действия речь может идти при этом, например, о рельсовых контактах механического, гидравлического, пневматического, магнитного, индуктивного или же оптического действия.
За счет прохождения, по меньшей мере, одного участка пути рельсовым транспортным средством рельсовые контакты, ограничивающие соответствующий участок или соответствующие участки пути, создают сообщения о прохождении, которые на первом этапе способа регистрируются. При этом, с одной стороны, существует, например, возможность создания и регистрации для каждой отдельной оси или каждого отдельного колеса рельсового транспортного средства отдельного сообщения о прохождении. С другой стороны, также возможны сбор со стороны рельсовых контактов информации о нескольких осях или колесах рельсового транспортного средства и создания для этих осей или колес одного общего сообщения о прохождении. В этом случае, как правило, потребуется, чтобы со стороны рельсовых контактов с соответствующим сообщением о прохождении была создана информация в моменты обнаружения отдельных осей или колес.
На втором этапе определяется скорость рельсового транспортного средства, причем следует настоятельно указать на то, что первый и второй этапы способа могут протекать или выполняться также в обратном порядке или также полностью или частично одновременно.
На третьем этапе длина, по меньшей мере, одного отрезка пути определяется с учетом временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости. При этом временной промежуток между зарегистрированными сообщениями о прохождении может быть определен, с одной стороны, например, за счет того, что со стороны принимающего сообщения о прохождении устройства, которое может представлять собой, например, устройство управления, протоколируются, а затем используются моменты соответствующего приема сообщений о прохождении. В частности, в случае временной синхронизации внутри системы, кроме того, в принципе, возможно также, чтобы временной промежуток между зарегистрированными сообщениями о прохождении брался из содержащихся в самих сообщениях о прохождении сведений, например в виде штемпелей времени.
Способ дает то преимущество, что с помощью временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости рельсового транспортного средства с неожиданно низкими затратами возможно сравнительно точное определение длины, по меньшей мере, одного участка пути. При этом предпочтительным образом длина, по меньшей мере, одного участка пути и, тем самым, расстояние между соответствующими рельсовыми контактами или определенным образом также их положение определяются с помощью сообщений и прохождении самих рельсовых контактов. Вследствие этого исключены возможные различия между определенной длиной соответствующего участка пути и фактическими «местами действия» рельсовых контактов или «активного расстояния» между ними, которые могли бы возникнуть, например, при оптическом определении длины, по меньшей мере, одного участка пути. Благодаря этому при последующих прохождениях, по меньшей мере, одного участка пути другими рельсовыми транспортными средствами активной становится длина, по меньшей мере, одного участка пути, которую можно назвать также эффективной длиной и которая была предварительно определена с помощью зарегистрированных сообщений о прохождении.
Кроме того, способ предпочтителен также в том отношении, что прохождение участков пути для контроля функциональной способности рельсовых контактов обычно осуществляется в любом случае и, тем самым, одновременно несложным образом может осуществляться определение длины, по меньшей мере, одного, ограниченного соответствующими рельсовыми контактами участка пути.
В принципе, определение скорости рельсового транспортного средства может происходить любым известным образом. Оно включает в себя, например, определение скорости посредством спидометра или с использованием радара в транспортном средстве или на участке пути.
Согласно одному особенно предпочтительному варианту способа скорость рельсового транспортного средства определяется с учетом его межосевых расстояний и временного промежутка между созданными осями рельсового транспортного средства сообщениями о прохождении. Это предпочтительно, поскольку в этом случае можно отказаться от дополнительных датчиков или компонентов для определения скорости рельсового транспортного средства. Вместо этого требуется лишь измерение его межосевых расстояний, с помощью которых, дополнительно учитывая временной промежуток между созданными осями рельсового транспортного средства сообщениями о прохождении, можно точно определить скорость рельсового транспортного средства. В этом случае его межосевые расстояния действуют, тем самым, в качестве постоянного масштаба, направляемого по измеряемому участку пути. В то же время скорость этого подвижного масштаба может определяться с помощью межосевых расстояний рельсового транспортного средства с высокой точностью.
Согласно другому особенно предпочтительному варианту способа скорость рельсового транспортного средства может определяться таким образом, что с учетом временного промежутка между двумя следующими друг за другом сообщениями о прохождении и соответствующего межосевого расстояния определяется средняя скорость в интервале времени. Это предпочтительно, поскольку за счет этого можно определить характеристику скорости рельсового транспортного средства в качестве функции времени. Правда, как правило, желательно, чтобы в рамках определения длины, по меньшей мере, одного участка пути рельсовое транспортное средство двигалось по нему с максимально равномерной скоростью. Однако точно постоянная скорость на практике достигается лишь с трудом, так что определение средней скорости рельсового транспортного средства в интервалы времени предпочтительно в отношении точности определения длины, по меньшей мере, одного участка пути.
Согласно другому особенно предпочтительному варианту способа средняя скорость определяется в интервале времени с учетом временного промежутка между двумя следующими друг за другом, созданными одним и тем же рельсовым контактом сообщениями о прохождении. Это предпочтительно, поскольку за счет этого в рамках определения длины, по меньшей мере, одного участка пути можно учесть или скорректировать также разные скорости частей или единиц рельсового транспортного средства, которые могут быть вызваны, например, толчками.
Рельсовое транспортное средство, за счет которого создаются сообщения о прохождении, могут быть любого рода. Сюда входят, в частности, состоящие из одной или нескольких единиц рельсовые транспортные средства, причем единица или каждая из единиц может быть выполнена с приводом или же без него.
Преимущественно способ усовершенствован таким образом, что регистрируются сообщения о прохождении, вызванные прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством, включающим в себя, по меньшей мере, один управляемый по своей скорости локомотив, и созданные ограничивающими соответствующий участок пути рельсовыми контактами. Использование, по меньшей мере, одного, управляемого по своей скорости локомотива дает то преимущество, что скорость рельсового транспортного средства можно поддерживать постоянной со сравнительно высокой точностью.
В качестве альтернативы или в сочетании с описанным выше предпочтительным вариантом способ может быть далее осуществлен таким образом, что регистрируются сообщения о прохождении, вызванные прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством, включающим в себя, по меньшей мере, один вагон без привода, и созданные ограничивающими соответствующий участок пути рельсовыми контактами. При этом, с одной стороны, возможно, чтобы рельсовое транспортное средство включало в себя только одну или несколько единиц без привода, например в виде грузовых вагонов, которые движутся, по меньшей мере, по одному участку пути только за счет силы тяжести и/или своего импульса. С другой стороны, помимо, по меньшей мере, одного вагона без привода рельсовое транспортное средство может содержать дополнительно также, по меньшей мере, один управляемый по своей скорости локомотив. Это дает то преимущество, что за счет управляемого по своей скорости локомотива возможно оказание активного влияния на скорость рельсового транспортного средства. За счет рельсового транспортного средства, включающего в себя дополнительно, по меньшей мере, один вагон без привода, существует далее возможность достижения максимального перекрытия рельсовым транспортным средством, по меньшей мере, одного участка пути, длину которого требуется определить, или ограничивающих соответствующий участок пути рельсовых контактов. За счет большего числа сообщений о прохождении или связанного с этим обнаружения соответственно большего числа осей или колес в распоряжение предоставляется более обширная, более плотно по времени следующая друг за другом измерительная информация в виде сообщений о прохождении, в результате чего достигается повышение точности определения длины, по меньшей мере, одного участка пути.
В соответствии с приведенными рассуждениями, по меньшей мере, один участок пути может представлять собой, в принципе, любой, ограниченными рельсовыми контактами участок пути в пределах парка железнодорожных или рельсовых путей.
Согласно другому особенно предпочтительному варианту определяется длина, по меньшей мере, одного участка пути спускной части сортировочной горки. Это предпочтительно, поскольку сортировочные горки имеют обычно большое число ограниченных рельсовыми контактами участков пути, длину которых следует точно определить для эффективного и надежного управления маневровыми работами на сортировочной горке. В этой связи способ позволяет с помощью данных, зарегистрированных или полученных за счет прохождения рельсовым транспортным средством спускной части сортировочной горки, определить сравнительно несложным образом с высокой точностью длину соответствующих участков путей.
В части устройства управления для определения длины, по меньшей мере, одного участка пути в основе изобретения лежит задача создания устройства управления, которое способствует сравнительно простой реализации особенно производительного способа определения длины, по меньшей мере, одного участка пути.
Эта задача решается, согласно изобретению, посредством устройства управления для определения длины, по меньшей мере, одного участка пути, причем устройство управления выполнено для регистрации сообщений о прохождении, вызванных прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством и созданных ограничивающими соответствующий участок пути рельсовыми контактами, а также определения скорости рельсового транспортного средства и длины, по меньшей мере, одного участка пути с учетом временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости.
Преимущества предложенного устройства управления соответствуют преимуществам предложенного способа, так что в этом отношении следует сослаться на приведенные выше рассуждения. То же относится к приведенным ниже предпочтительным вариантам устройства управления касательно соответствующего предпочтительного варианта способа, так что и в этом отношении следует сослаться на приведенные выше пояснения.
Преимущественно устройство управления может быть выполнено для определения скорости рельсового транспортного средства таким образом, что оно с учетом временного промежутка между двумя следующими друг за другом сообщениями о прохождении и соответствующего межосевого расстояния определяет среднюю скорость в интервале времени.
Согласно другому предпочтительному варианту устройство управления выполнено для определения средней скорости в интервале времени с учетом временного промежутка между двумя следующими друг за другом, созданными одним и тем же рельсовым контактом сообщениями о прохождении.
Предпочтительным образом устройство управления выполнено также для регистрации сообщений о прохождении, вызванных прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством, включающим в себя, по меньшей мере, один управляемый по своей скорости локомотив, и созданных ограничивающими соответствующий участок пути рельсовыми контактами.
Преимущественно устройство управления выполнено для регистрации сообщений о прохождении, вызванных прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством, включающим в себя, по меньшей мере, один вагон без привода, и созданных ограничивающими соответствующий участок пути рельсовыми контактами.
Согласно одному особенно предпочтительному варианту устройство управления является устройством управления маневровыми работами на сортировочной горке и для определения длины, по меньшей мере, одного участка пути ее спускной части.
Далее изобретение включает в себя систему управления маневровыми работами на сортировочной горке, содержащую предложенное устройство управления по одному из описанных выше предпочтительных вариантов и ограничивающие соответствующий участок пути рельсовые контакты для создания зарегистрированных устройством управления и вызванных прохождением, по меньшей мере, одного участка пути рельсовым транспортным средством.
Ниже изобретение более подробно поясняется на примере его осуществления со ссылкой на чертеж, на котором для пояснения примера выполнения способа изображен схематичный чертеж с примером выполнения устройства управления.
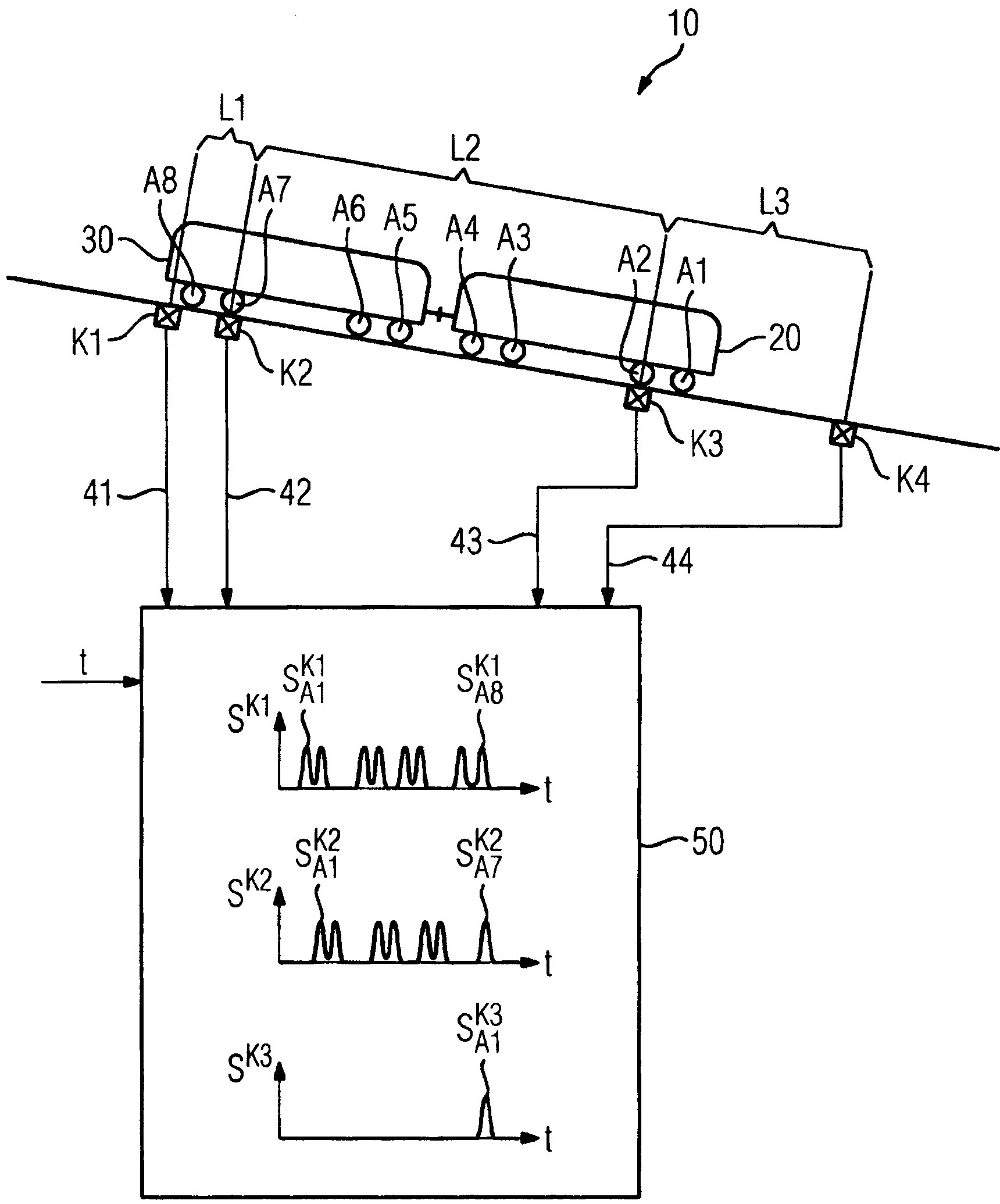
Рельсовое транспортное средство 10 содержит две сцепленные между собой подвижные единицы 20, 30. В рамках описанного примера следует предположить, что рельсовое транспортное средство 10 движется слева направо по спускной части сортировочной горки. В этом случае единицы 20, 30 могут представлять собой скатывающиеся вагоны без привода, прицепленный к локомотиву вагон без привода или два сцепленных локомотива. Независимо от этого единицы 20, 30 сцеплены максимально коротко и жестко, поскольку за счет этого через вагонную сцепку предотвращаются или, по меньшей мере, уменьшаются изменения переменного межосевого расстояния.
Следует указать на то, что в отличие от изображенного рельсовое транспортное средство 10 может содержать, разумеется, только одну единицу или же более двух сцепленных между собой единиц 20, 30.
Вдоль пути, по которому движется рельсовое транспортное средство 10, расположены ограничивающие участки L1-L3 пути рельсовые контакты K1-K4. Они отличаются тем, что выполнены любым известным образом для обнаружения осей или колес А1-А8 рельсового транспортного средства 10. В пределах сортировочной горки рельсовые контакты K1-K4 могут быть предусмотрены, например, для обнаружения состояния занятости участка пути или для определения скорости рельсового транспортного средства 10.
За счет прохождения участков L1-L3 пути рельсовым транспортным средством 10 рельсовые контакты K1-K4 создают сообщения о прохождении. Они передаются рельсовыми контактами K1-K4 через коммуникационные соединения 41-44 на устройство управления 50, которое может представлять собой, например, компьютер для управления работой сортировочной горки. При этом устройство управления 50 включает в себя предпочтительно компоненты аппаратного обеспечения, например в виде процессоров и средств памяти, и компоненты программного обеспечения, например в виде программного кода.
Сообщения о прохождении могут представлять собой, в принципе, сигналы любого рода; к ним относятся, в частности, цифровые и аналоговые сигналы.
В рамках описанного примера следует предположить, что со стороны рельсовых контактов K1-K3 на устройство управления 50 передаются сообщения о прохождении в виде аналоговых импульсов или сигналов. Регистрация сообщений о прохождении устройством управления 50 обозначена графами в нем, схематично изображающими зарегистрированные им сообщения о прохождении или сигналы SK1-SK3 рельсовых контактов K1-K3 в качестве функции времени t. При этом для каждого рельсового контакта Ki и каждой обнаруженной соответствующим рельсовым контактом оси Aj рельсового транспортного средства 10 возникает сообщение о прохождении или сигнал SKiAj. Для каждого из сообщений о прохождении устройство управления 50 регистрирует момент его поступления, что обозначено временем t в качестве входной величины устройства управления 50. Если время передачи сообщений о прохождении разных рельсовых контактов K1-K4 отличается, то это, при необходимости, следует учитывать в рамках обработки.
В изображенной ситуации все оси А1-А8 рельсового транспортного средства 10 прошли первый в направлении движения рельсовый контакт K1, так что видны восемь импульсов или сообщений о прохождении. По сравнению с этим второй рельсовый контакт K2 еще не обнаружил самую заднюю в направлении движения ось A8. Рельсовый контакт K3 уже обнаружил самую переднюю в направлении движения ось A1 и собирается обнаружить также ось A2 и передать на устройство управления 50 соответствующее сообщение о прохождении. Что касается рельсового контакта K4, то еще отсутствует прохождение рельсовым транспортным средством 10, так что здесь графическое изображение также отсутствует. Во избежание недоразумений следует указать на то, что обозначенные в устройстве управления 50 графы представляют собой лишь схематичное изображение, так что, в частности, моменты сообщений о прохождении не совсем точно соответствуют тем, которые фактически возникли бы для рельсового транспортного средства 10 в показанном положении рельсовых контактов K1-K4.
Следует указать на то, что в отличие от изображенного примера также рельсовые контакты K1-K4 также могли бы определять момент обнаружения соответствующей оси и передавать на устройство управления 50 с соответствующим сообщением о прохождении. В этом случае, как правило, будет целесообразным или потребуется синхронизация по времени рельсовых контактов K1-K4.
В частности, в случае сообщения о прохождении в виде цифрового сигнала оно может содержать однозначную идентификацию соответствующего рельсового контакта K1-K4, чтобы независимо от соответствующих коммуникационных соединений 41-44 однозначно соотнести сообщение о прохождении с соответствующим рельсовым контактом K1-K4.
Коммуникационные соединения 41-44 могут быть выполнены проводными и беспроводными, т.е., например, на радиооснове. Кроме того, рельсовые контакты K1-K4 и устройство управления 50 могут быть соединены между собой, например, системой шин.
Следует указать на то, что сигналы SKiAj показаны лишь схематично, и в зависимости от соответствующей реализации могут, разумеется, возникать и другие их характеристики. Сюда относится, в частности, случай, когда сообщения о прохождении или передающие их сигналы в отличие от изображенных на чертеже могут изображаться в качестве функции времени t в виде вертикальных штрихов и происходит либо лишь точечная передача соответствующего сообщения о прохождении, либо устройство управления 50 определяет момент времени относящийся к каждому принятому сообщению о прохождении.
С учетом временного промежутка между зарегистрированными устройством управления 50 сообщениями о прохождении и полученной скорости рельсового транспортного средства 10 можно определить длину соответствующего участка L1-L3 пути. При этом скорость рельсового транспортного средства 10 можно определить на основе измерения расстояний между его осями А1-А8 предпочтительно с помощью временного промежутка между созданными осями А1-А8 сообщениями о прохождении. Это может осуществляться, в частности, таким образом, что с учетом временного промежутка между двумя следующими друг за другом сообщениями о прохождении и соответствующего межосевого расстояния определяется средняя скорость в данный интервал времени.
Определение или расчет длины участков L1-L3 пути устройством управления 50 может осуществляться с учетом временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости, например, таким образом, что сначала зарегистрированные сообщения о прохождении соотносятся с соответствующими рельсовыми контактами K1-K4 и осями A1-A8. При этом преимущественно учитываются известные межосевые расстояния рельсового транспортного средства 10 и, по меньшей мере, примерно известное место расположения рельсовых контактов K1-K4. Кроме того, преимущественно учитывается, что расстояния между осями разных единиц 20, 30, например расстояние между осями А4, А5, как правило, будут известны с меньшей точностью или будут иметь во временной характеристике большую изменчивость, чем «внутренние» расстояния между осями А1-А4 или А5-А8 той же единицы 20 или 30. Кроме того, в рамках алгоритма определения длины участков L1-L3 пути можно сделать преимущественно различение между постоянными межосевыми расстояниями, например одной тележки, и непостоянными, т.е. изменяющимися, по меньшей мере, в определенном объеме, расстояниями между осями разных тележек (одной и той же единицы 20 или 30).
Если определяется средняя скорость рельсового транспортного средства 10 в отдельные интервалы времени, то в рамках определения длины участков L1-L3 пути можно произвести интегрирование скорости по времени.
Независимо от подробностей того, как с учетом временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости определяется длина участков L1-L3 пути, описанный способ дает то преимущество, что посредством постоянных межосевых расстояний рельсового транспортного средства 10 в распоряжении имеется постоянный масштаб, которым можно измерить участки L1-L3 пути. В то же время скорость этого масштаба можно определить со сравнительно высокой точностью, в частности, с помощью сообщений о прохождении, созданных осями А1-А4 единицы 20 и осями А5-А8 единицы 30, так что, в целом, происходит сравнительно точное определение движения или скорости рельсового транспортного средства 10 и, тем самым, расстояний между рельсовыми контактами K1-K4. В результате оказалось, что описанным способом возможно определение длины участков L1-L3 пути с точностью порядка нескольких сантиметров.
Кроме того, способ обладает тем основным преимуществом, что длина участков L1-L3 пути определяется по отношению к рельсовым контактам K1-K4, расстояние между которыми имеет значение в рамках, например, способа управления сортировочной горкой, и отпадают возможные отличия между оптически измеренной и «технически активной» длинами участков пути.
Кроме того, например, в рамках пуска в эксплуатацию сортировочной горки прохождение спускной части, например в начале первых тестов, является стандартной процедурой контроля функциональной способности рельсовых контактов K1-K4, так что предпочтительным образом не требуются дополнительные затраты для определения длины участков L1-L3 пути, в частности в виде ручного оптического измерения.
Реферат
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте и может использоваться для определения длины участка пути. Техническое решение заключается в определении длины, по меньшей мере, одного участка пути, регистрации сообщений о прохождении, вызванных прохождением по меньшей мере одного участка пути рельсовым транспортным средством и созданных ограничивающими соответствующий участок пути рельсовыми контактами. При этом устройство управления определяет скорость рельсового транспортного средства и длину по меньшей мере одного участка пути с учетом временного промежутка между зарегистрированными сообщениями о прохождении и полученной скорости. Достигается повышение точности определения длины участка железной дороги. 3 н. и 20 з.п. ф-лы, 1 ил.
Комментарии