Способ измерения и управления валковой жаткой - RU2731575C1
Код документа: RU2731575C1
Чертежи


Описание
Ссылка на родственную заявку
В настоящей заявке испрашивается приоритет по предварительной заявке на патент США №62/753251, поданной 31 октября 2018 года, содержание которой полностью включено в настоящий документ.
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе ориентации жатки и, в частности, к системе ориентации жатки, которая использует многоосный датчик для идентификации ориентации жатки.
Уровень техники
Многие рабочие машины имеют орудия, жатки или тому подобное, положение которых можно изменять относительно рабочей машины и, в свою очередь, относительно расположенной снизу поверхности. Рабочие машины часто имеют гидравлические системы, которые поднимают и опускают орудие относительно рабочей машины и расположенной снизу поверхности. Некоторые рабочие машины могут дополнительно регулировать наклон, крен, рыскание и высоту орудия с помощью гидравлической системы. Регулировка высоты, наклона, крена и рыскания орудия позволяет пользователю выполнять рабочую функцию, такую как кошение, путем ориентирования орудия с идеальной ориентацией для условий расположенной снизу поверхности.
Многие рабочие машины имеют визуальные индикаторы, которые идентифицируют положение орудия относительно рабочей машины. Эти рабочие машины имеют один или несколько рычажных узлов, которые соединяют орудие с рабочей машиной. Кроме того, на части рычажного узла часто расположен визуальный индикатор, который идентифицирует положение орудия относительно рабочей машины. В некоторых случаях пользователь должен выходить из рабочей машины или располагаться иным образом для наблюдения за визуальным индикатором, чтобы определить ориентацию орудия. Визуальные индикаторы могут быть сложны в использовании и требуют, чтобы пользователь останавливал рабочую машину и выходил из кабины, чтобы определить, расположено ли орудие в правильной ориентации.
Другие рабочие машины имеют датчик на цилиндре наклона орудия. Датчик идентифицирует осевое смещение цилиндра наклона, чтобы дополнительно передать пользователю ориентацию наклона орудия. Датчик цилиндра наклона часто соединен с внешней частью цилиндра наклона и, таким образом, подвержен контакту или иным повреждениям во время рабочей операции. Кроме того, датчик цилиндра наклона обычно идентифицирует только смещение цилиндра наклона, а не положение орудия вдоль нескольких осей.
Сущность изобретения
В одном варианте осуществления настоящего изобретения предложена рабочая машина, которая имеет орудие, соединенное с рабочей машиной, и первый датчик, соединенный с орудием. При этом первый датчик идентифицирует ориентацию орудия вдоль более чем одной оси.
В одном примере этого варианта осуществления первый датчик идентифицирует ориентацию орудия относительно точно установленного положения.
В другом примере этого варианта осуществления первый датчик идентифицирует положение орудия как вдоль оси наклона, так и вдоль оси крена, и выполнен с возможностью идентификации высоты орудия над расположенной снизу поверхностью.
В другом примере этого варианта осуществления предложен контроллер и система позиционирования орудия, которая соединяет орудие с рабочей машиной, причем контроллер управляет системой позиционирования орудия для изменения положения орудия относительно рабочей машины.
В еще одном примере предложен процесс калибровки, в котором первый датчик устанавливает требуемое положение относительно расположенной снизу поверхности.
В другом примере второй датчик соединен с рабочей машиной, причем ориентацию орудия идентифицируют путем сравнения значений первого датчика со значениями второго датчика. В одном аспекте этого примера предложен процесс калибровки, в котором второй датчик устанавливает ровное положение относительно расположенной снизу поверхности.
В другом примере этого варианта осуществления предложен процесс калибровки, в котором первый датчик устанавливает опущенное положение и поднятое положение и может идентифицировать множество положений между ними.
Другим вариантом осуществления этого изобретения является способ идентификации ориентации орудия, который включает обеспечение первого датчика, соединенного с орудием, контроллером и рабочей машиной, передачу первым датчиком в контроллер положения наклона орудия, положения крена орудия и положения высоты орудия.
Один пример этого варианта осуществления включает в себя обеспечение системы позиционирования орудия, которая принимает сигналы от контроллера для изменения положения орудия и сохранения первого положения в контроллере, которое соответствует первому положению наклона и первому положению крена. При этом контроллер связывается с первым датчиком, чтобы идентифицировать положение наклона орудия и положение крена орудия, чтобы выборочно перемещать орудие с помощью системы позиционирования орудия в первое положение. Один аспект этого примера включает в себя обеспечение второго датчика, связанного с контроллером и соединенного с рабочей машиной, при этом второй датчик передает в контроллер положение наклона рабочей машины и положение крена рабочей машины относительно расположенной снизу поверхности. В другом аспекте этого примера контроллер определяет положение орудия относительно расположенной снизу поверхности путем идентификации положения наклона и положения крена рабочей машины относительно расположенной снизу поверхности и путем идентификации положения наклона и положения крена орудия относительно рабочей машины.
В другом примере этого варианта осуществления первый датчик передает положение рыскания орудия в контроллер.
В еще одном примере этого варианта осуществления первый датчик передает ускорение орудия в контроллер. Один аспект этого примера включает в себя сохранение порога ускорения в контроллере, причем, когда ускорение орудия превышает порог ускорения, контроллер отправляет команду отключения орудия.
В другом варианте осуществления обеспечена система ориентации орудия для рабочей машины, которая включает в себя рабочую машину, орудие, соединенное с рабочей машиной, контроллер, первый датчик, соединенный с рабочей машиной и передающий положение рабочей машины в контроллер, и второй датчик, соединенный с орудием и передающий положение орудия в контроллер. При этом контроллер сравнивает положение орудия с положением рабочей машины, чтобы идентифицировать ориентацию орудия с помощью расположенной снизу поверхности.
В одном примере этого варианта осуществления первый датчик передает наклон рабочей машины в контроллер, и второй датчик передает наклон орудия в контроллер. В одном аспекте этого примера контроллер сравнивает наклон рабочей машины с наклоном орудия, чтобы определить положение орудия относительно рабочей машины.
Другой пример этого варианта осуществления включает в себя систему позиционирования орудия, обменивающуюся данными с контроллером для изменения ориентации орудия относительно рабочей машины в требуемое положение, при этом контроллер сохраняет рабочее положение, поднятое положение и требуемое положение, и требуемое положение является вводимыми оператором данными. В одном аспекте этого примера контроллер переводит орудие между рабочим положением и поднятым положением с помощью системы позиционирования орудия путем сравнения положения рабочей машины с положением орудия.
Краткое описание чертежей
Вышеупомянутые аспекты настоящего изобретения и способ их получения станут более очевидными, и само изобретение будет более понятным посредством ссылки на последующее описание вариантов осуществления изобретения, рассматриваемых вместе с сопровождающими чертежами, на которых:
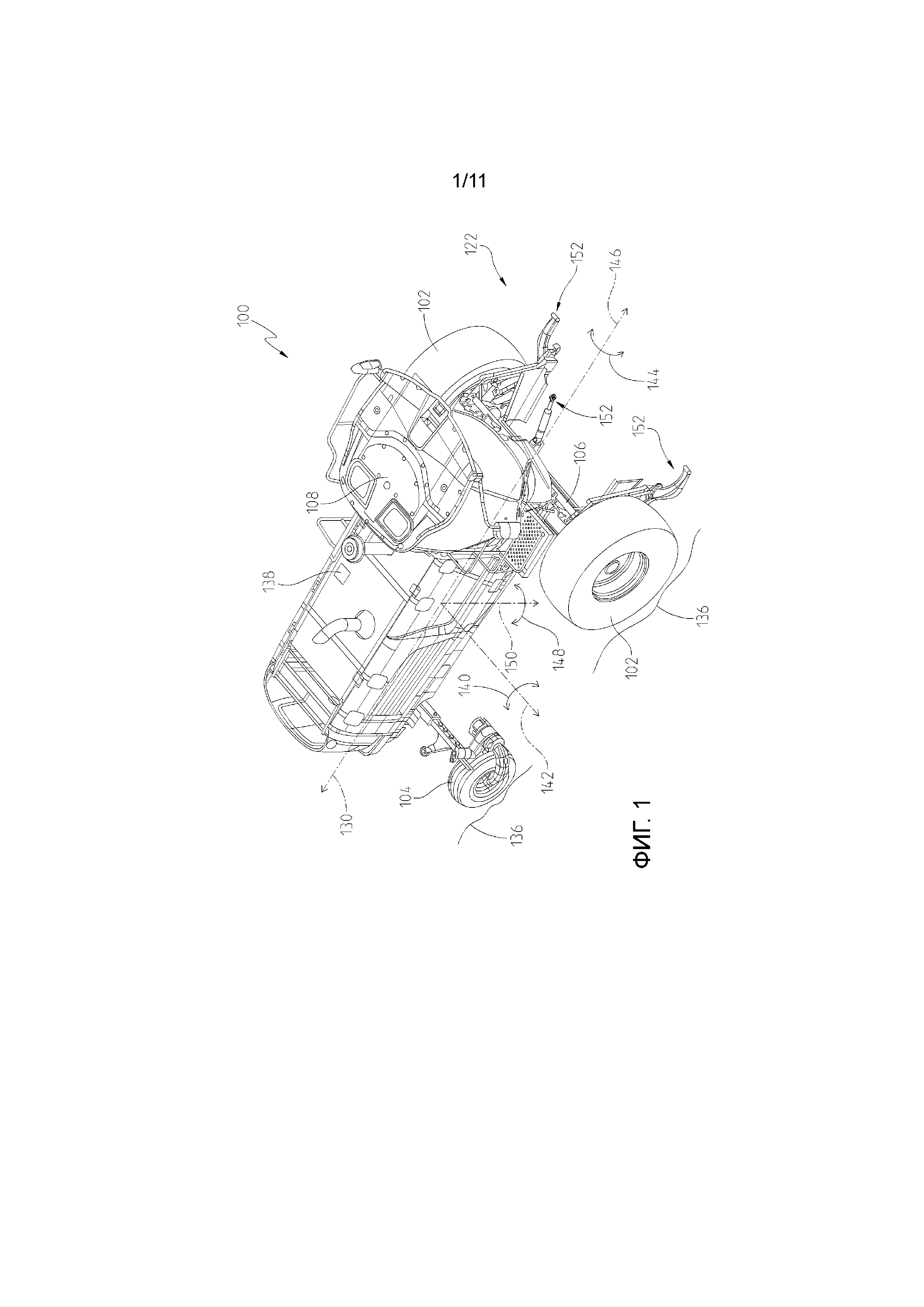
Фиг. 1 представляет собой вид в перспективе сверху рабочей машины без присоединенного к ней орудия;
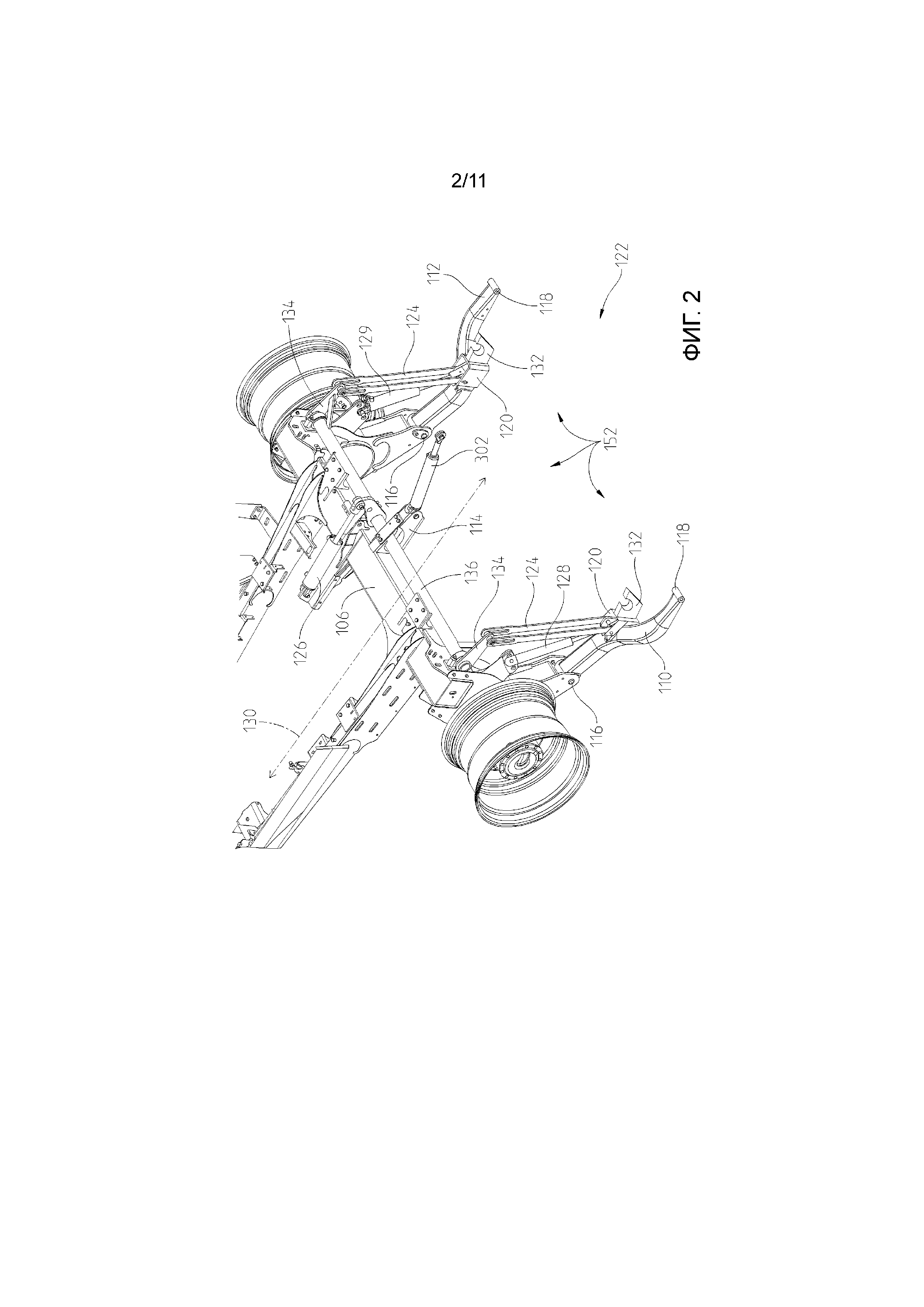
Фиг. 2 представляет собой частичный вид в перспективе сверху рабочей машины Фиг. 1 с удалением нескольких компонентов;
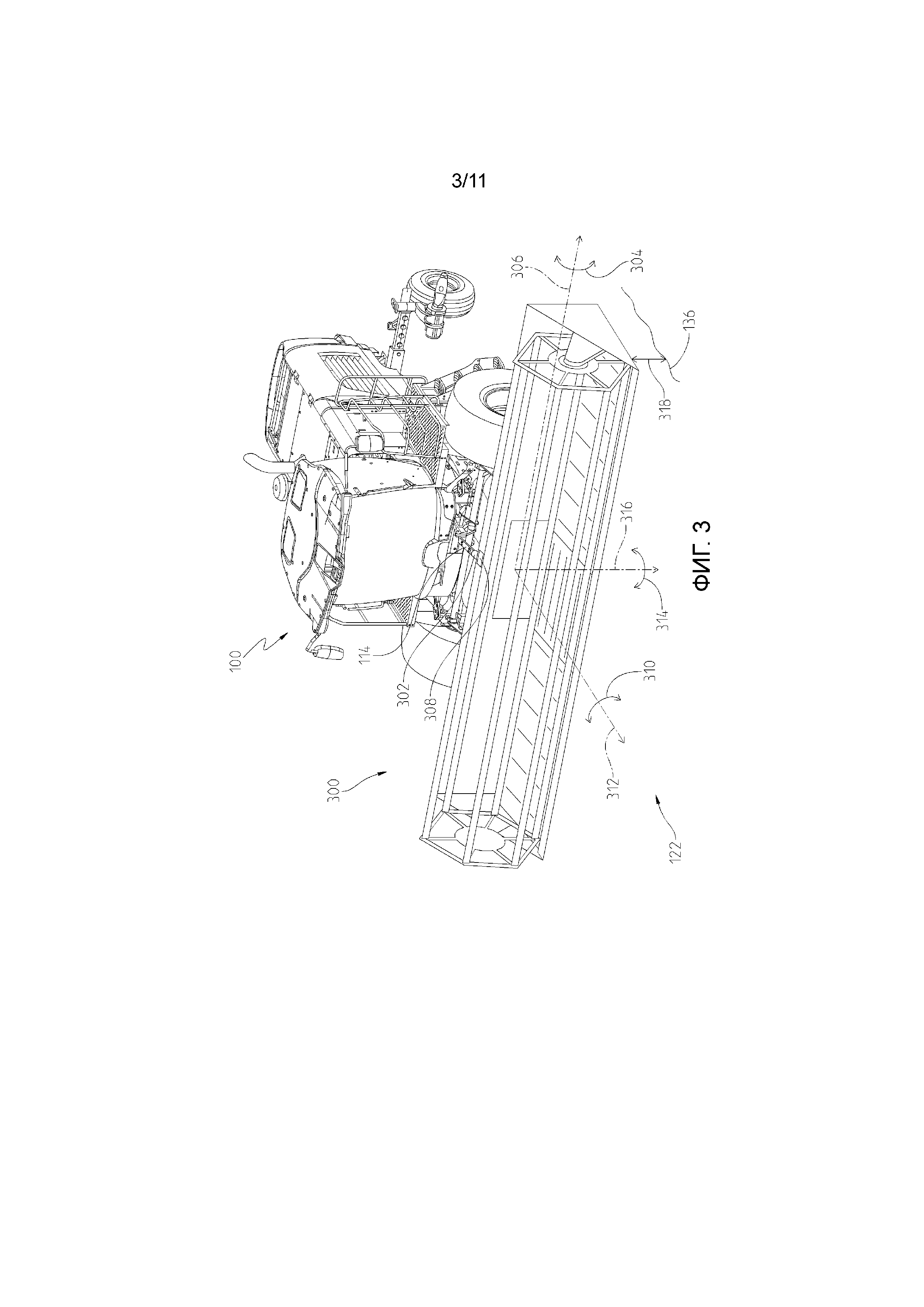
Фиг. 3 представляет собой вид в перспективе сверху рабочей машины Фиг. 1, с присоединенной к ней полотенной жаткой;
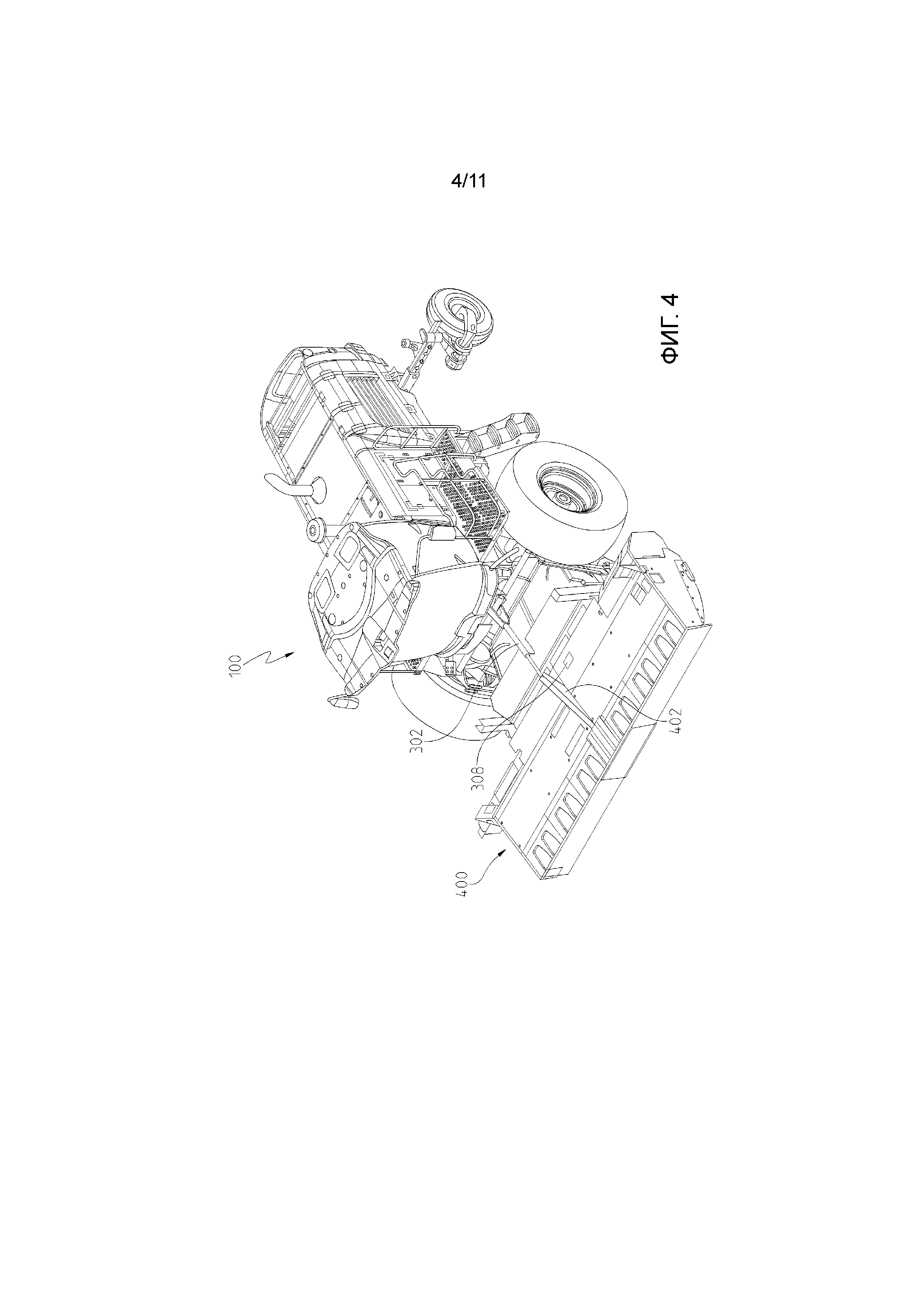
На Фиг. 4 показан вид в перспективе сверху рабочей машины Фиг. 1, с присоединенной к ней роторной жаткой;
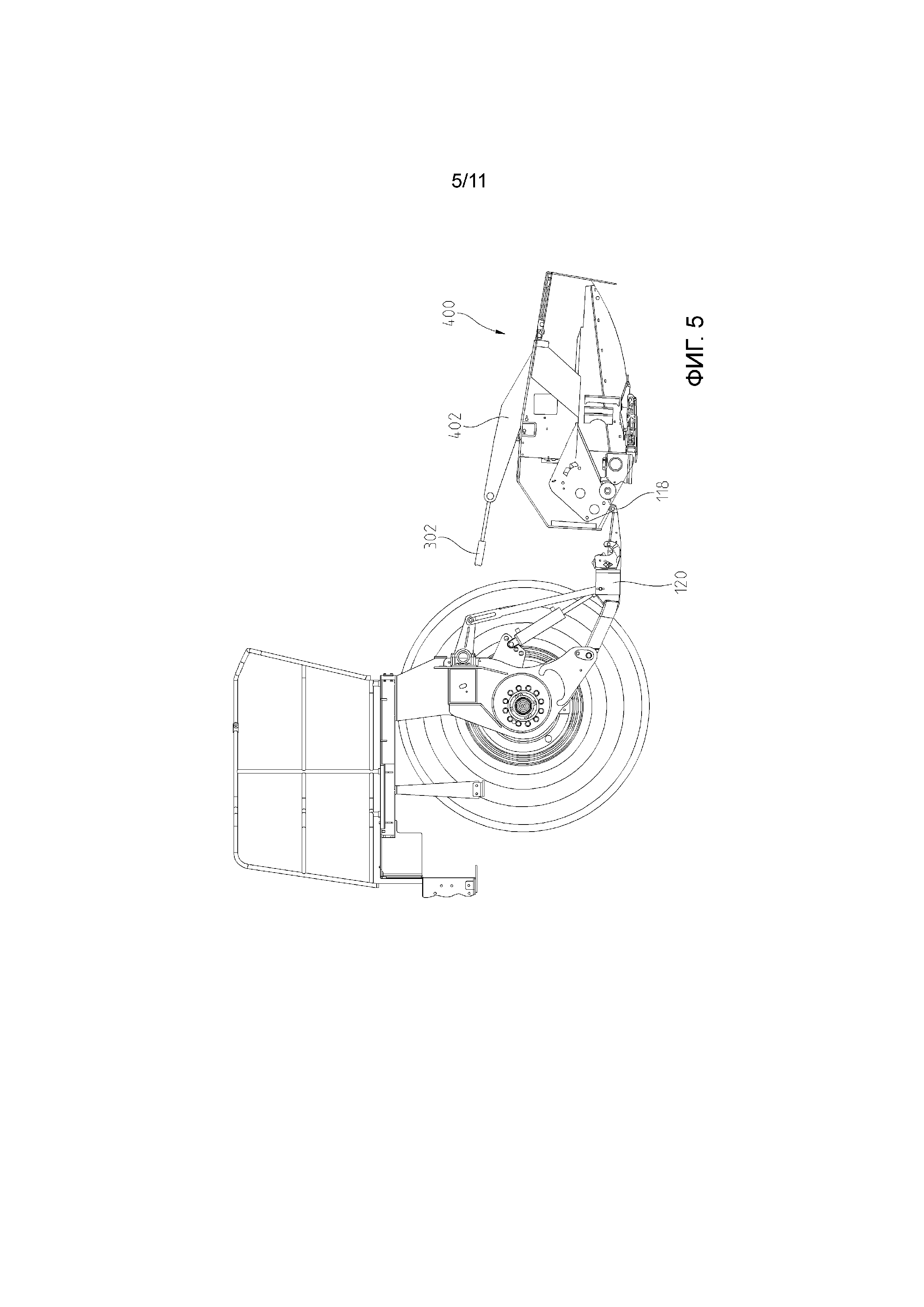
Фиг. 5 представляет собой частичный вид сбоку рабочей машины Фиг. 4;
Фиг. 6 представляет собой иллюстративный схематичный вид компонентов системы управления;
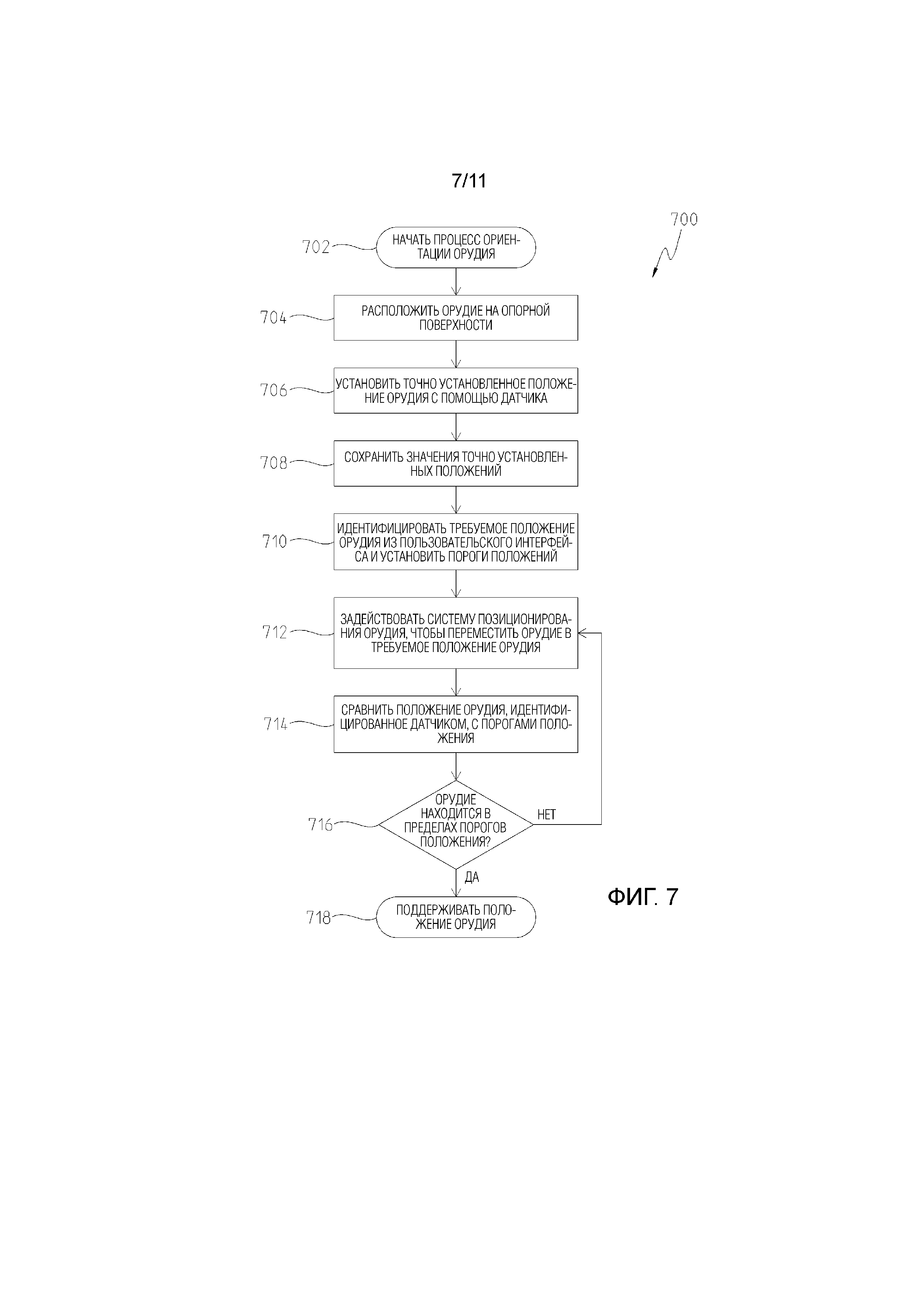
Фиг. 7 представляет собой схематичный вид одного варианта осуществления логической системы позиционирования орудия;
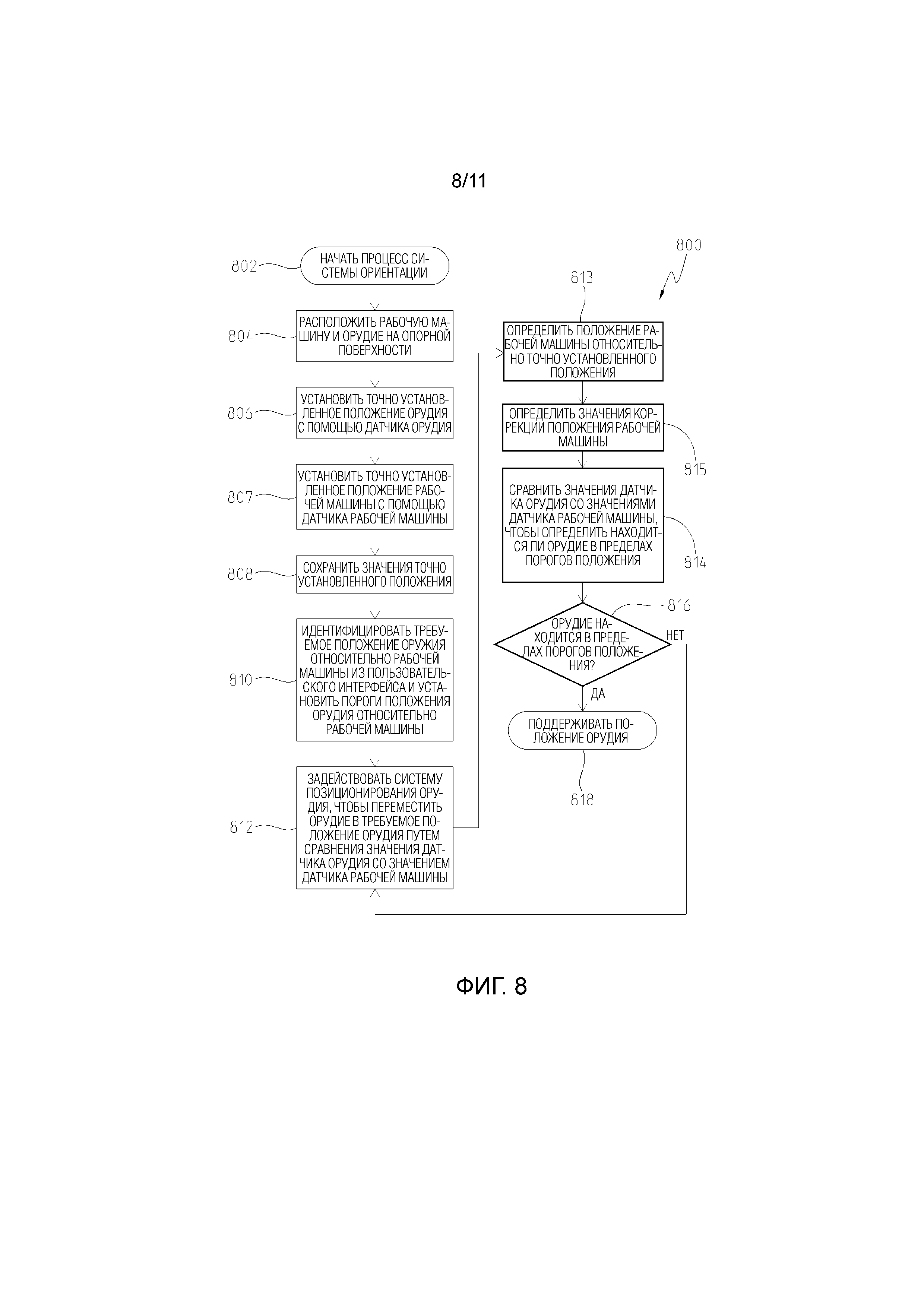
Фиг. 8 представляет собой схематичный вид другого варианта осуществления логической системы позиционирования орудия;
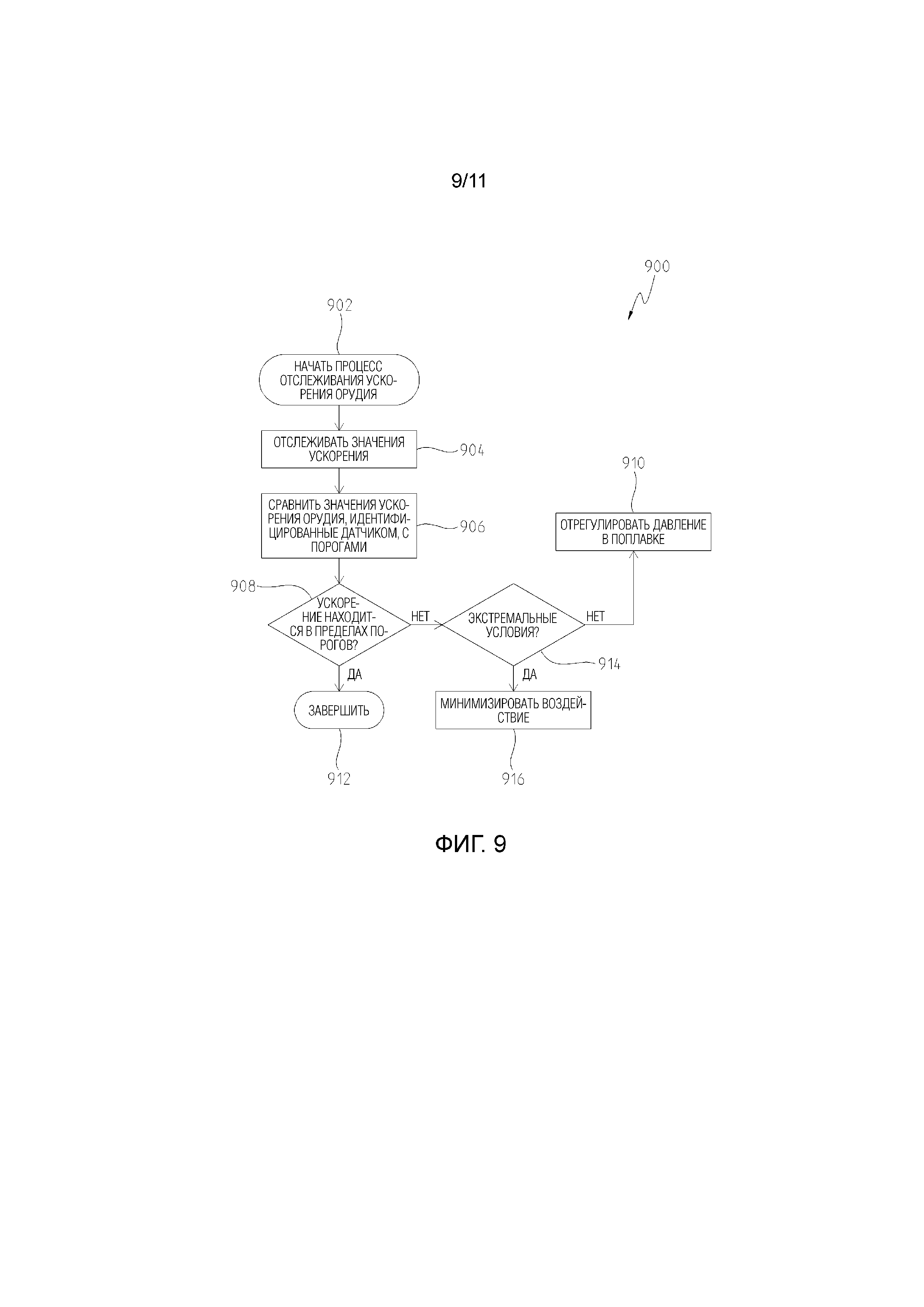
Фиг. 9 представляет собой схематичный вид логической системы управления плавающим цилиндром;
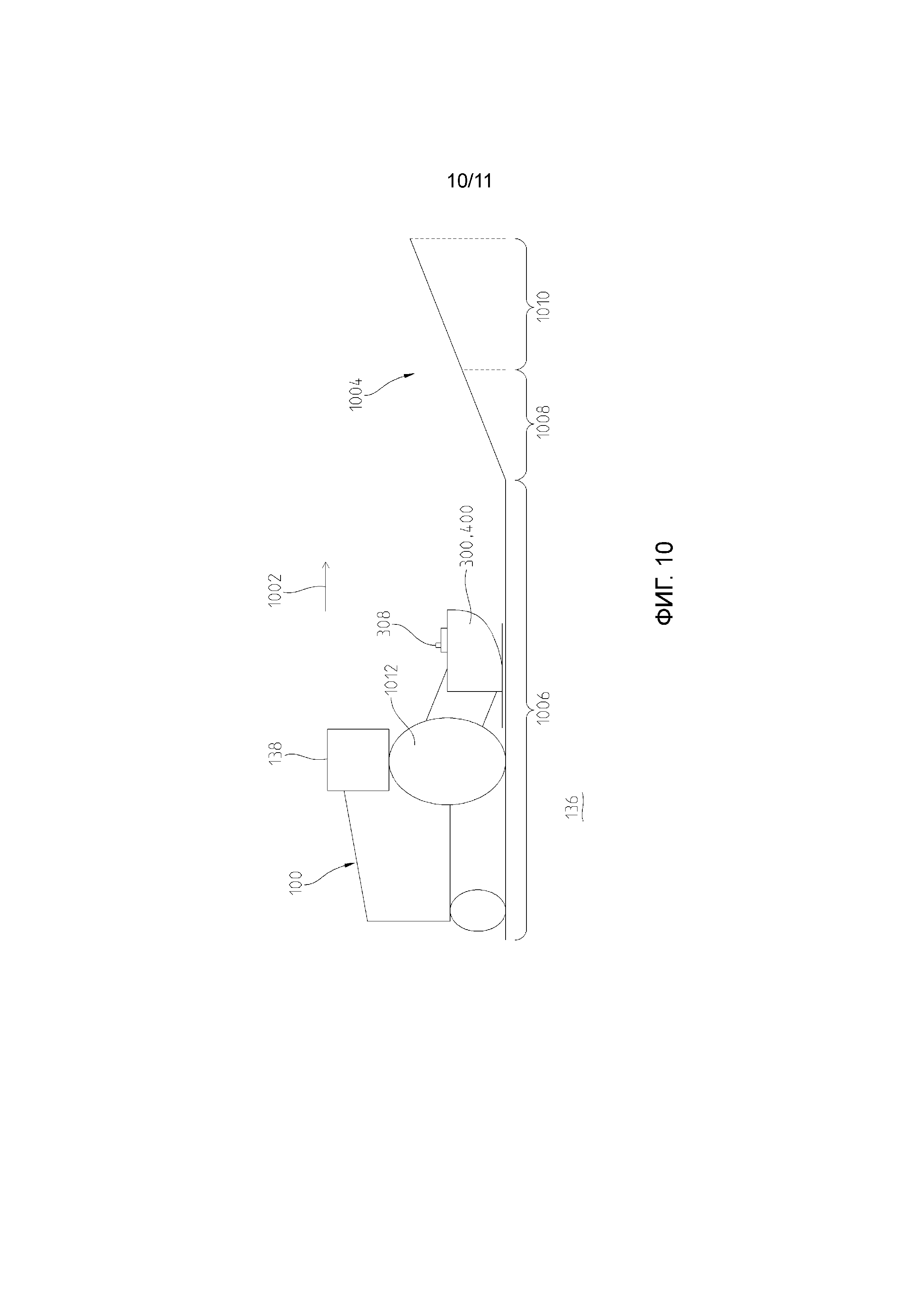
Фиг. 10 представляет собой схематичный вид одной ситуации при изменении грунта; и
Фиг. 11 представляет собой схематичный вид другого варианта осуществления логической системы позиционирования орудия.
Соответствующие ссылочные позиции используют для обозначения соответствующих частей на нескольких видах.
Подробное описание изобретения
Варианты осуществления настоящего изобретения, описанные ниже, не предназначены для того, чтобы быть исчерпывающими или ограничивать изобретение точными формами в следующем подробном описании. Скорее, варианты осуществления выбраны и описаны так, чтобы другие специалисты в данной области техники могли оценить и понять принципы и способы реализации настоящего изобретения на практике.
Со ссылкой на Фиг.1 показан вид в перспективе сверху рабочей машины 100 без жатки или орудия, присоединенных к ней. Рабочая машина 100 может иметь по меньшей мере один блок питания, который подает механическую, электрическую и гидравлическую энергию в рабочую машину 100. В одном варианте осуществления блок питания обеспечивает энергию для вращения пары ведущих колес 102, соединенных с рамой 106 рабочей машины 100. Ведущие колеса 102 могут вращаться относительно рабочей машины 100, чтобы обеспечить движение рабочей машины 100 по расположенной снизу поверхности 136. Рабочая машина 100 также может образовывать ось 130 перемещения, расположенную в продольном направлении через центральную часть рабочей машины 100.
В дополнение к ведущим колесам 102 в варианте осуществления, показанном на Фиг. 1, представлена пара поворотных самоустанавливающихся колес 104. Самоустанавливающиеся колеса 104 могут свободно поворачиваться вокруг крепления, чтобы обеспечить поворот рабочей машины 100 в соответствии с направлением ведущих ходовых колес 102. Однако конкретная конфигурация ведущих колес 102 и самоустанавливающихся колес 104 не должна быть ограничивающей. В другом варианте осуществления колес может не быть вообще. Вместо этого блок питания может подавать энергию для пары гусениц, обеспечивая прохождение рабочей машины по расположенной снизу поверхности. В еще одном варианте осуществления самоустанавливающиеся колеса 104 могут быть не поворотными самоустанавливающимися колесами, а вместо этого колесами, соединенными с осью и выполненными с возможностью механического соединения с блоком питания.
Независимо от того, как движется рабочая машина, рабочая машина 100 также может иметь кабину 108, соединенную с рамой 106. В кабине 108 может быть множество элементов управления, которые позволяют пользователю управлять различными системами рабочей машины 100. В одном неисключительном варианте осуществления множество элементов управления позволяет пользователю управлять механическими, электрическими и гидравлическими системами рабочей машины 100. Кроме того, одним неисключительным примером элементов управления может быть пользовательский интерфейс 606 (см. Фиг. 6). Пользовательский интерфейс 606 может быть расположен в кабине 108 и представлять собой сенсорный экран, одну или несколько ручек или кнопок, рычаг или любое другое известное устройство, способное идентифицировать пользовательский ввод.
На Фиг. 2 более четко показаны места установки для жатки или орудия (жатка или орудие не показаны на Фиг. 1 или Фиг. 2). В частности, на Фиг. 2 показаны первый подъемный рычаг 110, второй подъемный рычаг 112, верхний кронштейн 114 и верхний привод 302. Первый и второй подъемные рычаги 110, 112 вместе с верхним кронштейном 114 могут быть присоединены к орудию для управления как высотой 318 (см. Фиг. 3) жатки относительно расположенной снизу поверхности 136, так и углом жатки относительно рабочей машины 100.
В одном варианте осуществления каждый подъемный рычаг 110, 112 может быть шарнирно соединен с рабочей машиной 100 на первом шарнире 116. Первый шарнир 116 может быть расположен в проксимальной части каждого подъемного рычага 110, 112 относительно рамы 106. Кроме того, каждый подъемный рычаг 110, 112 может проходить от первого шарнира 116 в направлении переднего конца 122 рабочей машины 100. Каждый подъемный рычаг 110, 112 может иметь первое соединительное устройство 118, установленное на дистальном конце соответствующего подъемного рычага 110, 112. Каждый подъемный рычаг 110, 112 также может иметь второе соединительное устройство 120, соединенное с соответствующим подъемным рычагом 110, 112 в месте между первым шарниром 116 и первым соединительным устройством 118. В одном варианте осуществления второе соединительное устройство 120 может иметь фиксирующее устройство 132, соединенное с ним, которое может быть расположено либо в запертом положении, либо в разомкнутом положении.
Первый и второй плавающие цилиндры 128, 129 могут быть соединены между рамой 106 и первым и вторым подъемными рычагами 110, 112, соответственно. Более конкретно по меньшей мере один соединительный рычаг 124 может быть шарнирно соединен с каждым подъемным рычагом 110, 112 на одном конце и с кулачковым поворотным рычагом 134 на другом. Кулачковый поворотный рычаг 134 может быть соединен с осью 136 подъемного рычага, которая может вращаться с помощью подъемного цилиндра 126. Когда подъемный цилиндр 126 вращает ось 136 подъемного рычага, поворотный рычаг 134 может вращаться вместе с ним и регулировать положение соответствующего подъемного рычага 110, 112 с помощью соответствующего соединительного рычага 124. В одном аспекте этого изобретения ориентация подъемного цилиндра 126 может частично регулировать высоту 318 орудия относительно расположенной снизу поверхности 136.
Хотя показан один пример подъемного цилиндра 126, в этом раскрытии рассматривают любой известный способ управления положением орудия относительно рабочей машины. Более конкретно, в других вариантах осуществления плавающие цилиндры 128, 129 могут быть приводами, положение которых можно выборочно менять с помощью контроллера 608 (см. Фиг. 6) независимо друг от друга. В этой конфигурации плавающие цилиндры 128, 129 могут поднимать каждый из подъемных рычагов 110, 112 одновременно или выборочно поднимать каждый из подъемных рычагов 110, 112 независимо друг от друга. Соответственно, ориентацию орудия можно варьировать по меньшей мере с помощью плавающих цилиндров 128, 129 и подъемного цилиндра 126.
В одном варианте осуществления подъемный цилиндр 126 поворачивает подъемные рычаги 110, 112 между поднятым положением и опущенным положением. Подъемный цилиндр 126 также может позволять регулировать высоту 318 жатки, когда жатка находится в опущенном положении. В этом варианте осуществления подъемный цилиндр 126 может управлять высотой 318 жатки относительно расположенной снизу поверхности 136, в то время как плавающие цилиндры 128, 129 могут быть соединены с каждым подъемным рычагом 110, 112, чтобы обеспечить демпфированное сопротивление, когда жатка сталкивается с силой движения. Более конкретно, плавающие цилиндры 128, 129 могут обеспечивать смещающую силу на подъемных рычагах 110, 112 в сторону от расположенной снизу поверхности 136. Когда подъемные рычаги 110, 112 соединены с жаткой, подъемный цилиндр 126 может располагать жатку на требуемой высоте от расположенной снизу поверхности. Плавающие цилиндры 128, 129 могут обеспечивать смещающую силу на подъемных рычагах 110, 112 так, чтобы жатка могла легче подниматься относительно расположенной снизу поверхности 136, если она контактирует с препятствием на ней. Кроме того, плавающие цилиндры 128, 129 могут позволять пользователю регулировать смещающую силу жатки относительно расположенной снизу поверхности путем увеличения или уменьшения силы плавающего цилиндра соответствующих подъемных рычагов 110, 112.
В одном варианте осуществления соединительный рычаг 124 может быть шарнирно соединен с кулачковым поворотным рычагом 134 с помощью штифта, расположенного в пазе соединительного рычага 124. Зацепление с помощью паза обеспечивает перемещение подъемным цилиндром 126 подъемных рычагов 110, 112 в опущенное положение (где штифт находится в самой верхней части паза) и позволяет плавающим цилиндрам 128, 129 обеспечивать смещающую силу для жатки, чтобы жатка могла отодвинуться от расположенной снизу поверхности, если она контактирует с препятствием на ней. Более конкретно, когда штифт находится в верхней части паза, и жатка контактирует с препятствием на расположенной снизу поверхности, плавающие цилиндры 128, 129 могут обеспечивать смещающую силу, чтобы способствовать подъему жатки над препятствием расположенной снизу поверхности. Кроме того, когда жатка поднимается над препятствием на расположенной снизу поверхности, штифт может переходить в нижнюю часть паза. Как только препятствие полностью пройдено, штифт может вернуться в верхнюю часть паза, и высоту 318 жатки можно поддерживать с помощью цилиндра 126.
Далее со ссылкой на Фиг. 3 рабочая машина 100 показана с орудием 300, таким как присоединенная к ней полотенная жатка. Орудие 300 может быть соединено с рабочей машиной 100 с помощью второго соединительного устройства 120 соответствующего первого и второго подъемных рычагов 110, 112. Кроме того, орудие 300 также может быть соединено с верхним кронштейном 114 посредством верхней тяги 302. В варианте осуществления верхняя тяга 302 может представлять собой гидравлический цилиндр, который может быть выборочно приведен в действие пользователем посредством множества элементов управления. Верхняя тяга 302 может быть шарнирно соединена с верхним кронштейном 114 на конце основания и шарнирно соединена с креплением жатки орудия 300 на конце жатки.
В одном варианте осуществления контроллер 608 может выборочно приводить в действие верхнюю тягу 302, чтобы изменять ориентацию орудия 300. В этом варианте осуществления, если верхнюю тягу 302 приводят в действие, чтобы она стала более длинной, орудие 300 может изменять наклон 304 по мере того, как оно поворачивается в сторону от рабочей машины 100 вокруг оси 306 наклона. Более конкретно, когда верхняя тяга 302 удлиняется, часть орудия 300 в направлении переднего конца 122 перемещается в направлении расположенной снизу поверхности. Альтернативно, если верхнюю тягу 302 приводят в действие, чтобы она стала короче, орудие 300 может вращаться в направлении вверх к рабочей машине 100. Кроме того, когда верхняя тяга 302 сжимается, часть переднего конца 122 орудия 300 отклоняется от расположенной снизу поверхности 136.
Далее со ссылкой на Фиг. 4 рабочая машина 100 показана с соединенным с ней орудием в виде роторной жатки 400. Роторная жатка 400 может быть соединена с рабочей машиной 100 посредством подъемных рычагов 110, 112 и верхней тяги 302 аналогично орудию 300. Кроме того, термин «орудие», используемый в настоящем документе, может относиться к любому типу орудия или жатки, известных в данной области техники, и представленные примеры не являются исчерпывающими.
На Фиг. 4 более четко показано, как роторная жатка 400 соединена с рабочей машиной 100. Более конкретно, верхняя тяга 302 может шарнирно соединять верхний кронштейн 114 с поворотным кронштейном 402. Верхняя тяга 302 может управлять угловой ориентацией роторной жатки 400 относительно расположенной снизу поверхности аналогично тому, как описано более подробно выше для орудия 300. Соответственно, описанные выше признаки для верхней тяги 302 в равной степени применимы в данном случае и считаются включенными в настоящий документ также для роторной жатки 400.
Далее со ссылкой на Фиг. 5 первое соединительное устройство 118 показано шарнирно соединенным с роторной жаткой 400. В одном варианте осуществления первое соединительное устройство 118 может соединяться с роторной жаткой без контакта со вторым соединительным устройством 120.
В одном аспекте этого изобретения единственный датчик 308 орудия может быть соединен с орудием 300, чтобы идентифицировать ориентацию орудия 300, 400 и испытываемых им усилий. Датчик 308 орудия может быть инерциальным измерительным блоком, который имеет трехосный акселерометр микроэлектромеханической системы и трехосный микроэлектромеханический гироскоп. Датчик 308 орудия может быть выполнен с возможностью идентификации ориентации орудия 300, такой как наклон 304 вокруг оси 306 наклона, крен 310 вокруг оси 312 крена и рыскание 314 вокруг оси 316 рыскания. Кроме того, первый датчик 308 может идентифицировать значения ускорения, испытываемые орудием 300. Единственный датчик 308 орудия может быть расположен в месте на орудии, которое по существу защищено от воздействия вредного мусора.
В одном аспекте этого изобретения, наклоном 304, рысканием 314 и креном 310 орудия 300 всеми можно управлять с помощью системы 152 позиционирования орудия. Системой 152 позиционирования орудия можно управлять с помощью одного или нескольких контроллеров 608 для манипулирования одним или несколькими из плавающих цилиндров 128, 129, верхней тяги 302 и подъемного цилиндра 126, чтобы изменить положение орудия, соединенного с ней. Более конкретно, один вариант осуществления, рассмотренный в настоящем документе, позволяет изменять крен орудия 300 путем подъема первого подъемного рычага 110 с помощью первого плавающего цилиндра 128, в то же время сохраняя положение второго подъемного рычага 112 с помощью второго плавающего цилиндра 129 или наоборот. Аналогичным образом, наклоном 15 орудия можно манипулировать с помощью системы 152 позиционирования орудия путем изменения длины верхней тяги 302 с помощью контроллера 608. В еще одном примере первый и второй подъемные рычаги 110, 112 могут быть цилиндром 602 длины первого подъемного рычага и цилиндром 604 длины второго подъемного рычага, которые, помимо всего прочего, являются приводами, связанными с контроллером 608 и выполненными с возможностью изменения ориентации для изменения рыскания 314 орудия 100.
Хотя в настоящем документе показан и описан конкретный тип системы 152 позиционирования орудия, в этом раскрытии рассматривается любой тип системы позиционирования орудия, известный в данной области техники. Более конкретно, идеи этого изобретения можно реализовывать c помощью обычной трехточечной сцепки в сборе. Например, трехточечная сцепка в сборе может иметь три привода, связанных с контроллером, чтобы изменять высоту 318 орудия относительно расположенной снизу поверхности 136. Кроме того, в трехточечной сцепке можно использовать три привода для изменения ориентации присоединенного к ней орудия в любом одном или нескольких из направлений рыскания 314, наклона 304 или крена 310.
Аналогично, единственный датчик 138 рабочей машины может быть присоединен к рабочей машине 100, чтобы идентифицировать ориентацию и силы, испытываемые рабочей машиной 100. Датчик 138 рабочей машины также может быть инерциальным измерительным блоком, который имеет трехосный акселерометр микроэлектромеханической системы и трехосный микроэлектромеханический гироскоп. Датчик 138 рабочей машины может быть выполнен с возможностью идентификации наклона 140 вокруг оси 142 наклона, крена 144 вокруг оси 146 крена и рыскания 148 вокруг оси 150 рыскания. Кроме того, датчик 138 рабочей машины может идентифицировать значения ускорения, испытываемые рабочей машиной 100. В одном неисключительном примере датчик 130 рабочей машины соединен с рамой 106 рабочей машины 100.
Далее со ссылкой на Фиг. 6 показан схематичный вид нескольких компонентов, описанных в настоящем документе. Более конкретно, ориентация компонентов системы 152 позиционирования орудия может быть выборочно изменена одним или несколькими контроллерами 608. Контроллер 608 может быть одним контроллером, который имеет процессор и хранящийся в нем блок памяти, или контроллер может иметь доступ к блоку памяти или процессору, расположенному удаленно от него. Кроме того, в другом варианте осуществления, рассмотренном в настоящем документе, идеи этого изобретения реализуют с помощью множества контроллеров. Кроме того, еще в одном варианте осуществления удаленный пользовательский интерфейс 606 может действовать как контроллер 608 для выполнения функций, описанных в настоящем документе.
Независимо от типа или местоположения контроллера 608, контроллер 608 может выборочно изменять ориентацию орудия 300 с помощью системы 152 позиционирования орудия. Более конкретно, электрогидравлическая система, электропневматическая система или электрическая система может выборочно изменять положение соответствующих приводов. Например, электрогидравлические и электропневматические системы могут иметь множество гидравлических или пневматических клапанов, которые может перемещать контроллер 608 посредством электрической системы, чтобы обеспечивать переменные потоки текучей среды и давления для приводов. Аналогично, электрические системы могут иметь электрические приводы, которые перемещает контроллер 608 для изменения ориентации орудия 300. Соответственно, в этом раскрытии рассмотрено использование любого известного способа манипулирования орудием 300 с помощью системы 152 позиционирования орудия.
Независимо от того, используется ли в системе 152 позиционирования орудия гидравлическая, пневматическая или электрическая энергия для изменения положения орудия 300, орудие 300 можно перемещать в каждом из направлений наклона 304, крена 310 и рыскания 314 посредством системы 152 позиционирования орудия. В одном неисключительном примере контроллер 608 может перемещать орудие в положение крена, изменяя длину только одного из плавающих цилиндров 128, 129. Аналогично, контроллер 608 может перемещать орудие в направление 304 наклона, изменяя длину верхней тяги 302. Кроме того, контроллер 608 может перемещать орудие в направление 312 рыскания, изменяя длину первого подъемного рычага 110 с помощью цилиндра 602 длины первого подъемного рычага или изменяя длину второго подъемного рычага 112 с помощью цилиндра 604 длины второго подъемного рычага.
Хотя в настоящем документе показана и описана одна конкретная система 152 позиционирования орудия, в этом раскрытии рассматривается также использование других вариантов осуществления. Более конкретно, в одном варианте осуществления система позиционирования орудия может представлять собой соединительное устройство с тремя элементами навески, которое соединяет орудие с рабочей машиной. Каждый из трех элементов навески может представлять собой привод, который имеет переменную длину, управляемую контроллером 608. В этой конфигурации контроллер 608 может изменять длины трех элементов навески, чтобы манипулировать орудием в направлениях наклона, крена и рыскания, 304, 312, 314. Соответственно, любую известную систему позиционирования орудия можно рассматривать в настоящем документе как перемещаемую контроллером 608, как описано в настоящем документе.
Далее со ссылкой на Фиг. 7 показан один неисключительный пример логической схемы 700 позиционирования орудия. Логическая схема 700 позиционирования орудия может использовать датчик 308 орудия, систему 152 позиционирования орудия и контроллер 608 для выборочного управления положением орудия 300, 400. Более конкретно, логическая схема 700 позиционирования орудия может выборочно быть запущена в блоке 702. Блок 702 запуска орудия может быть выборочно запущен пользователем через пользовательский интерфейс 606 или автоматически запущен контроллером 608 на основе условий рабочей машины. Например, пользовательский интерфейс 606 может иметь опцию для пользователя для начала процесса ориентации орудия, такую как кнопка, значок на сенсорном экране, голосовая команда или любой другой известный способ выбора пользовательского интерфейса. Альтернативно, контроллер 608 может запустить блок 702, когда рабочая машина 100 находится в рабочем положении или тому подобное.
Независимо от способа, используемого для начала процесса ориентации орудия в блоке 702, в блоке 704 пользователю может быть дано указание или иным образом предложено расположить орудие на опорную поверхность. В одном неисключительном примере пользовательский интерфейс 606 может быть использован для указания пользователю расположить орудие на опорной поверхности. В качестве альтернативы, в одном варианте осуществления блок 704 может быть предполагаемым условием, когда запускают начало процесса 702 ориентации орудия. Соответственно по меньшей мере в одном варианте осуществления блок 704 может быть частью блока 702.
В блоке 706 контроллер 608 может установить по меньшей мере одно точно установленное или исходное положение орудия. В одном неисключительном примере точно установленное положение может быть положением, в котором орудие опирается на расположенную снизу поверхность. В другом примере, исходное положение может быть определено относительно внешнего источника, такого как датчик базовой станции или тому подобное. Кроме того, в одном аспекте этого изобретения пользовательский интерфейс 606 может продолжать давать указание пользователю расположить орудие на ровной поверхности в блоке 706. В одном примере этого изобретения блок 706 может включать в себя сохранение нескольких точно установленных положений. Более конкретно, в дополнение к сохранению данных о положении от датчика 308 орудия, когда орудие опирается на расположенную снизу поверхность, контроллер 608 также может перемещать орудие в полностью поднятое положение и сохранять данные о положении от датчика 308 орудия также в полностью поднятом положении. Кроме того, контроллер 608 может перемещать орудие в любую ориентацию и сохранять в нем данные о положении в качестве части блока 706.
Ровная плоская поверхность может быть рекомендована в блоке 706, но с помощью этого изобретения можно реализовывать идеи, описанные в настоящем документе, независимо от ориентации расположенной снизу поверхности, при условии, что рабочая машина и инструмент ориентированы по существу одинаково относительно расположенной снизу поверхности. То есть, при условии, что расположенная снизу поверхность является относительно плоской, блок 706 может быть эффективно выполнен, даже если поверхность не является ровной.
Контроллер 608 может устанавливать точно установленное положение или положения в блоке 706, позволяя системе 152 позиционирования орудия находиться в нейтральном состоянии, в котором на любые приводы или тому подобное не подается энергия. В нейтральном состоянии орудие 300, 400 может опускаться на расположенную снизу поверхность в зависимости от силы тяжести, действующей на орудие. Более конкретно, если система позиционирования орудия является гидравлической или пневматической, любые используемые в ней цилиндры могут не находиться под давлением и могут изменять положение, когда орудие опускается на расположенную снизу поверхность. Аналогичным образом, если система 152 позиционирования орудия использует электрические приводы, их можно не приводить в действие в блоке 706, чтобы обеспечить расположение орудия вдоль расположенной снизу поверхности. В качестве альтернативы, приводы системы 152 позиционирования орудия можно приводить в действие для направления орудия в положение на земле в блоке 704, 706.
В блоке 708 контроллер 608 может использовать датчик 308 орудия, чтобы идентифицировать и сохранять значения точно установленного положения орудия. Более конкретно, если датчик 308 орудия представляет собой инерциальный измерительный блок, описанный выше, контроллер 608 может идентифицировать положение наклона вокруг оси 306 наклона, положение крена вокруг оси 312 крена и положение рыскания вокруг оси 316 рыскания в блоке 708. Контроллер 608 может собирать и сохранять соответствующее положение с помощью использования трехосного акселерометра микроэлектромеханической системы и трехосного микроэлектромеханического гироскопа датчика 308 орудия. Сохраненные положения могут быть использованы контроллером 608 для идентификации ориентации орудия 300, 400, когда оно контактирует с расположенной снизу поверхностью.
Кроме того, контроллер 608 может хранить множество точек данных положения для каждой ориентации орудия. Например, контроллер 608 может хранить точки данных для каждого из наклона, крена, рыскания и высоты, когда орудие находится на расположенной снизу поверхности, и также хранить точки данных для наклона, крена, рыскания и высоты, когда орудие находится в полностью поднятом положении. Кроме того, контроллер 608 может хранить точки данных для любой другой ориентации орудия 300, 400.
Затем в блоке 710 контроллер 608 может идентифицировать требуемое положение орудия из пользовательского интерфейса 606. Более конкретно, пользовательский интерфейс 606, помимо всего прочего, может иметь выбор для высоты орудия над расположенной снизу поверхностью, рыскания орудия, наклона орудия и крена орудия. В качестве альтернативы, пользовательский интерфейс 606 может иметь предварительно заданные ориентации орудия, хранящиеся в нем, где высота, рыскание, наклон и крен все установлены на основе предварительно заданного выбора. В одном неисключительном примере требуемое положение орудия может быть любым положением между положением, идентифицированным, когда орудие находится на земле, и полностью поднятым положением, идентифицированным в блоке 706.
В одном неисключительном примере этого изобретения контроллер 608 может устанавливать пороговые значения на основе требуемого положения орудия в блоке 710. Например, контроллер 608 может иметь предварительно заданные допустимые пределы выше и ниже требуемого положения орудия, выбранного пользователем. Более конкретно, если пользователь идентифицирует требуемую высоту в пять дюймов, контроллер может установить нижнюю пороговую высоту примерно четыре дюйма и верхний порог примерно шесть дюймов в качестве одного неисключительного примера. Аналогично, требуемое положение орудия может соответствовать углу наклона, углу крена и углу рыскания. Контроллер 608 также может устанавливать верхний и нижний пороги, которые соответствуют идентифицированным углам наклона, крена и рыскания. Например, верхний порог угла может быть на один градус больше, чем требуемый угол, а нижний порог угла может быть на один градус меньше, чем требуемый угол.
Хотя в настоящем документе описаны некоторые конкретные пороговые значения, в этом раскрытии рассматривается использование пороговых значений, которые больше, чем и меньше, чем описанные. Кроме того, в одном варианте осуществления пользователь может выбирать пороговые значения с помощью пользовательского интерфейса 606 вместо того, чтобы автоматически выводить пороговые значения из требуемого положения орудия. Соответственно, в этом раскрытии рассматривается использование множества различных пороговых значений в блоке 710.
В блоке 712 контроллер 608 может задействовать систему 152 позиционирования орудия, чтобы переместить орудие в требуемое положение орудия, идентифицированное в блоке 710. В этом блоке контроллер 608 может использовать любой один или несколько из плавающего цилиндра 128 первого подъемного рычага, плавающего цилиндра 129 второго подъемного рычага, цилиндра 602 длины первого подъемного рычага, цилиндра 604 длины второго подъемного рычага, верхней тяги 302 или подъемного цилиндра 126 для изменения положения орудия так, чтобы оно было ориентировано в пределах пороговых значений требуемого положения орудия. Более конкретно, в блоке 714 контроллер 608 может непрерывно отслеживать датчик 308 орудия, когда он манипулирует системой 152 позиционирования орудия в направлении требуемого положения орудия, установленного в блоке 710.
В блоке 716 контроллер 608 определяет, находится ли положение орудия в пределах порога положения орудия, установленного в блоке 710. Более конкретно, контроллер 608 идентифицирует высоту, угол рыскания, угол крена и угол наклона с помощью датчика 308 орудия путем сравнения текущих показаний датчика 308 со значениями точно установленного положения блока 708. Другими словами, в блоке 716 контроллер 608 сравнивает идентифицированные значения с пороговыми значениями положения орудия. Если идентифицированные значения не находятся в пределах пороговых значений по сравнению с значениями точно установленного положения, контроллер 608 может повторять блоки 712, 714 и 716 до тех пор, пока идентифицированные значения не будут находиться в пределах пороговых значений. Как только идентифицированные значения будут в пределах пороговых значений в блоке 716, контроллер 608 может поддерживать положение орудия с помощью системы 152 позиционирования орудия в блоке 718.
Далее со ссылкой на Фиг.8 показан один неисключительный пример логической схемы 800 позиционирования орудия и рабочей машины. Логическая схема 800 позиционирования орудия и рабочей машины может использовать датчик 308 орудия, систему 152 позиционирования орудия, датчик 138 рабочей машины и контроллер 608 для выборочного управления положением орудия 300. Более конкретно, логическая схема 800 позиционирования орудия и рабочей машины может быть выборочно запущена в блоке 802. Блок 802 ориентации орудия может быть выборочно запущен пользователем через пользовательский интерфейс 606 или автоматически запущен контроллером 608 на основе условий рабочей машины, как описано выше для блока 702.
Независимо от способа, используемого для начала процесса ориентации орудия в блоке 802, в блоке 804 пользователю может быть дано указание или иным образом предложено расположить орудие 300, 400 и рабочую машину на опорную поверхность. В одном неисключительном примере пользовательский интерфейс 606 может быть использован для указания пользователю расположить орудие на опорной поверхности. В качестве альтернативы, в одном варианте осуществления блок 804 может быть предпринят, когда запущен процесс 802 начала ориентации орудия. Соответственно по меньшей мере в одном варианте осуществления блок 804 может быть частью блока 802. В одном неисключительном примере опорная поверхность может представлять собой расположенную снизу поверхность, которая является по существу ровной и плоской.
В блоке 806 контроллер 608 может установить одно или несколько точно установленных положений орудия, используя датчик 308 орудия, аналогично блоку 706, описанному выше. В одном неисключительном примере первое точно установленное положение может быть положением, в котором орудие 300, 400 опирается на расположенную снизу поверхность 136, и второе точно установленное положение может быть положением, в котором орудие находится в полностью поднятом положении. Кроме того, в одном аспекте этого изобретения пользовательский интерфейс 606 может продолжать давать указание пользователю расположить орудие на ровной поверхности в блоке 806. В блоке 806 может быть рекомендована ровная плоская поверхность, но с помощью этого изобретения можно реализовать идеи, описанные в настоящем документе, независимо от ориентации расположенной снизу поверхности, при условии, что рабочая машина и орудие ориентированы по существу одинаково относительно расположенной снизу поверхности. То есть, при условии, что расположенная снизу поверхность относительно плоская, блок 806 может быть эффективно выполнен, даже если поверхность не ровная.
Аналогично, в блоке 807 контроллер 608 может использовать датчик 138 рабочей машины, чтобы установить точно установленное положение рабочей машины. В одном неисключительном примере точно установленное положение может быть положением, в которой рабочая машина 100 находится на плоской поверхности. Хотя ровная расположенная снизу поверхность может быть предпочтительна, блоки 806 и 807 могут быть выполнены также на плоскости, не являющейся ровной. В одном аспекте этого изобретения контроллер 608 использует датчик 138 рабочей машины для установления плоской ориентации расположенной снизу поверхности.
В блоке 808 контроллер 608 может использовать датчик 308 орудия и датчик 138 рабочей машины для идентификации и сохранения значений точно установленного положения орудия 300, 400 и рабочей машины 100. Более конкретно, если датчик 308 орудия представляет собой инерциальный измерительный блок, описанный выше, контроллер 608 может идентифицировать положение наклона вокруг оси 306 наклона, положение крена вокруг оси 312 крена и положение рыскания вокруг оси 316 рыскания в блоке 808. Датчик 138 рабочей машины может аналогично представлять собой инерциальный измерительный блок, описанный выше и соединенный с шасси рабочей машины 100. В этой конфигурации контроллер 608 может идентифицировать положение наклона вокруг оси 142 наклона, положение крена вокруг оси 146 крена и положение рыскания вокруг оси 150 рыскания в блоке 808. Контроллер 608 может собирать и хранить соответствующие данные о положении с помощью использования трехосного акселерометра микроэлектромеханической системы и трехосного микроэлектромеханического гироскопа датчика 308 орудия и датчика 138 рабочей машины. Сохраненные положения могут быть использованы контроллером 608 для идентификации ориентации орудия 300, 400 и рабочей машины 100, когда орудие контактирует с расположенной снизу поверхностью в полностью поднятом положении и в любом другом точно установленном положении.
Затем в блоке 810 контроллер 608 может идентифицировать требуемое положение орудия из пользовательского интерфейса 606 аналогично блоку 710. Более конкретно, пользовательский интерфейс 606, помимо всего прочего, может иметь выбор для высоты орудия над расположенной снизу поверхностью, рыскания орудия, наклона орудия и крена орудия. В качестве альтернативы, пользовательский интерфейс может иметь предварительно заданные ориентации орудия, сохраненные в нем, где высота, рыскание, наклон и крен все установлены на основе предварительно заданного выбора. В одном аспекте этого варианта осуществления требуемое положение орудия может быть определено путем установления значений смещения датчика 308 орудия относительно датчика 138 рабочей машины.
В одном неисключительном примере этого изобретения контроллер 608 может устанавливать пороговые значения на основе требуемого положения орудия в блоке 810. Например, контроллер 608 может иметь предварительно заданные допустимые пределы выше и ниже требуемого положения орудия, выбранного пользователем, как описано выше для блока 710.
Кроме того, в одном примере этого варианта осуществления требуемое положение орудия может быть смещением текущего положения рабочей машины. Более конкретно, датчик 138 рабочей машины может устанавливать текущую ориентацию расположенной снизу поверхности посредством передачи крена 144, наклона 140 и рыскания 146 рабочей машины 100 в контроллер 608. Затем контроллер 608 может использовать датчик 308 орудия, чтобы проверить, что орудие 300 остается в требуемом положении орудия относительно расположенной снизу поверхности. Например, если пользователю необходимо, чтобы орудие имело угол наклона смещения относительно расположенной снизу поверхности, контроллер 608 может сначала определить угол наклона расположенной снизу поверхности, используя датчик 138 рабочей машины, а затем манипулировать орудием с помощью системы 152 позиционирования орудия, так чтобы угол наклона орудия 300, 400 относительно расположенной снизу поверхности 136 являлся углом наклона смещения, выбранным пользователем. Хотя угол наклона был конкретно описан в настоящем документе, в этом раскрытии рассматривается сравнение значений датчика 308 орудия со значениями датчика 138 рабочей машины для любой из ориентаций наклона, рыскания, крена и высоты.
В блоке 812 контроллер 608 может задействовать систему 152 позиционирования орудия, чтобы переместить орудие в требуемое положение орудия, идентифицированное в блоке 810. В этом блоке контроллер 608 может использовать любой один или несколько из плавающего цилиндра 128 первого подъемного рычага, плавающего цилиндра 129 второго подъемного рычага, цилиндра 602 длины первого подъемного рычага, цилиндра 604 длины второго подъемного рычага, верхней тяги 302 или подъемного цилиндра 126 для изменения положения орудия 300, 400 для его ориентации в пределах пороговых значений требуемого положения орудия, установленного в блоке 810. Кроме того, в блоке 813 контроллер 608 может определять текущее положение или ориентацию рабочей машины относительно точно установленной ориентации с помощью датчика 138 рабочей машины. Аналогично, в блоке 815 контроллер 608 может определять значения текущего положения или ориентации рабочей машины относительно точно установленной ориентации рабочей машины 100. Другими словами, в блоке 815 контроллер 608 может определять, насколько ориентация рабочей машины 100 изменилась относительно точно установленного положения и задавать для нее значения коррекции положения. Значения коррекции положения могут быть разностью между значениями точно установленного положения и положением рабочей машины, идентифицированным в блоке 813. Соответственно, в блоке 814 контроллер 608 может непрерывно отслеживать датчик 138 рабочей машины и датчик 308 орудия, когда он манипулирует системой 152 позиционирования орудия в направлении требуемого положения орудия, установленного в блоке 810.
В блоке 816 контроллер 608 определяет, находится ли положение орудия в пределах порога положения орудия, установленного в блоке 810. Более конкретно, контроллер 608 идентифицирует высоту, угол рыскания, угол крена и угол наклона с помощью датчика 138 рабочей машины и датчика 308 орудия и сравнивает идентифицированные значения с пороговыми значениями положения орудия. Если идентифицированные значения не находятся в пределах пороговых значений, контроллер 608 может повторять блоки 812, 813, 815, 814 и 816, пока идентифицированные значения не будут в пределах пороговых значений. Как только идентифицированные значения будут в пределах пороговых значений в блоке 816, контроллер 608 может поддерживать положение орудия с помощью системы 152 позиционирования орудия в блоке 818.
Далее со ссылкой на Фиг. 9 раскрыт один вариант осуществления логической схемы 900 давления в поплавке. В одном варианте осуществления системы 152 позиционирования орудия давление, подаваемое на плавающие цилиндры 128, 129, может быть изменено контроллером 608, чтобы обеспечить переменную подпружиненную силу для подъемных рычагов 110, 112 и тем самым для любого соединенного с ним орудия. Сила упругости, создаваемая плавающими цилиндрами 128, 129, может помочь орудию 300, 400 преодолеть любые препятствия, с которыми оно контактирует на расположенной снизу поверхности, как описано выше. В одном аспекте этого изобретения логическая схема 900 давления в поплавке может использовать датчик 308 орудия, чтобы изменять давление в поплавке и тем самым подпружиненную силу, приложенную плавающими цилиндрами 128, 129.
В блоке 902 можно запускать процесс мониторинга ускорения орудия. Блок 902 может быть автоматически запущен, когда рабочая машина находится во включенном состоянии, или он может быть запущен пользователем через пользовательский интерфейс 606. Независимо от того, как запускают логическую схему давления в поплавке, после ее запуска контроллер 608 может отслеживать датчик 308 орудия для определения значений ускорения, испытываемых орудием 300, 400 в блоке 904. Более конкретно, контроллер 608 может использовать трехосный акселерометр микроэлектромеханической системы датчика 308 орудия для определения значений ускорения, испытываемых орудием 300, 400.
В блоке 906 контроллер 608 может сравнивать значения ускорения, идентифицированные в блоке 904, с порогом ускорения, сохраненным в контроллере 608 или введенным в него через пользовательский интерфейс 606. В одном примере этого варианта осуществления пороги ускорения могут быть идеальными значениями ускорения, которые орудие бы применяло в идеальной рабочей среде. Альтернативно, пользователь может вводить идеальные значения ускорения, которые он хотел бы применить к орудию, посредством плавающих цилиндров 128, 129 путем ввода значений ускорения через пользовательский интерфейс 606.
Независимо от того, предварительно задано ли пороговое значение в контроллере 608 или введено пользователем через пользовательский интерфейс 606 в блок 908, контроллер 608 может сравнивать активные значения ускорения, измеренные датчиком 308 орудия, с порогами ускорения, идентифицированными в блоке 906. Если значения ускорения не находятся в пределах порогового диапазона, контроллер 608 может регулировать давление в поплавке в блоке 910. Более конкретно, контроллер 608 может увеличивать или уменьшать давление в поплавке, применяемое к плавающим цилиндрам 128, 129, на основании значений ускорения, идентифицированных датчиком 308 орудия. Однако, если значения ускорения находятся в пределах пороговых значений в блоке 908, контроллер 608 может завершить эту логическую последовательность или продолжить сравнивать значения ускорения с пороговыми значениями в блоке 912.
В еще одном аспекте этого изобретения значения ускорения, идентифицированные датчиком 308 орудия, могут отслеживаться контроллером 608, чтобы определить, когда орудие имеет нежелательный контакт в блоке 914. Нежелательный контакт может возникать, когда орудие ударяется о большой камень, бревно или другое препятствие на расположенной снизу поверхности. В этом примере, когда датчик 308 орудия идентифицирует недопустимый контакт в блоке 914, контроллер 608 может регулировать условия работы орудия в блоке 916. В одном неисключительном примере это может включать в себя снижение уровня энергии для орудия 300, 400, остановка рабочей машины 100 или выполнение любой другой функции, чтобы минимизировать риск повреждения рабочей машины 100 или орудия 300, 400.
Далее со ссылкой на Фиг. 10 показан схематичный вид сбоку изменения рельефа грунта. На Фиг. 10 показана рабочая машина 100, движущаяся в прямом направлении 1002 в направлении изменения 1004 уклона. В примере на Фиг. 10 изменение 1004 уклона может представлять собой наклон в расположенной снизу поверхности 136. Однако идеи этого изобретения также можно применять к спускам и боковым изменениям в расположенной снизу поверхности 136. В схематическом виде на Фиг. 10 расположенная снизу поверхность разделена на плоскую секцию 1006, секцию 1008 с частичным наклоном и секцию 1010 с полным наклоном.
Плоская секция 1006 может быть характерна для частей поля или тому подобного, где расположенная снизу поверхность 136 является по существу плоской. В плоской секции 1006 орудие 300, 400 может быть расположено в соответствии с указанием системы 152 позиционирования орудия. То есть расположенная снизу поверхность 136 не изменяет положение орудия 300, 400 относительно рабочей машины 100, поскольку и орудие 300, 400, и рабочая машина 100 расположены на плоской расположенной снизу поверхности 136.
Однако когда рабочая машина движется в прямом направлении к изменению 1004 уклона, орудие 300, 400 перемещается в секцию 1008 с частичным наклоном перед колесами 1012 рабочей машины 100. В этой ситуации орудие 300, 400 может иметь полозья, колеса или другие механизмы для контакта с землей, которые заставляют орудие 300, 400 перемещаться относительно рабочей машины 100, когда орудие 300, 400 движется вдоль секции 1008 с частичным наклоном, в то время как рабочая машина 100 остается на плоской секции 1006.
Как описано в настоящем документе, орудие 300, 400 может быть соединено с рабочей машиной 100 с помощью множества тяг или тому подобного, которые позволяют орудию 300, 400 перемещаться относительно рабочей машины 100. В вариантах осуществления, показанных в настоящем документе, подъемные рычаги 110, 112 и верхняя тяга 302 шарнирно соединены с рабочей машиной 100, чтобы позволить орудию 300, 400 подниматься и опускаться при сохранении по существу наклонной ориентации или наклона 304 орудия 300, 400. В плане, показанном на Фиг. 10 сохранение ориентации наклона орудия 300, 400 при его входе в секцию 1008 с частичным наклоном может привести к тому, что любые режущие механизмы или тому подобное орудия 300, 400 врежутся в расположенную снизу поверхность 136. Другими словами, когда орудие 300, 400 находится в секции 1008 с частичным наклоном, орудие 300, 400 и рабочая машина 100 больше не занимают одну поверхность, и наклон 304 орудия 300, 400 может привести орудие 300, 400 в расположенную снизу поверхность 136, если наклон 304 не отрегулирован.
Далее со ссылкой на Фиг. 11, показан один пример логической блок–схемы, которая позволяет в контроллер 608 регулировать систему 152 позиционирования орудия для учета изменений в рельефе расположенной снизу поверхности 136. Более конкретно, контроллер 608 может отслеживать датчик 308 орудия и датчик 138 рабочей машины в блоке 1102. В примере на Фиг. 10 контроллер 608 может сравнивать положение датчика 308 орудия с датчиком 138 рабочей машины, чтобы идентифицировать ориентацию рабочей машины 100 и орудия 300, 400. Когда орудие 300, 400 входит в секцию 1008 с частичным наклоном, контроллер 608 может идентифицировать изменение высоты в орудии 300, 400 относительно рабочей машины 100, когда орудие 300, 400 перемещается вверх по наклону расположенной снизу поверхности 136.
В одном аспекте этого изобретения контроллер 608 может использовать фильтр или тому подобное для управления показаниями с датчика 138 рабочей машины и датчика 308 орудия. Более конкретно, контроллер 608 может отфильтровывать сигналы, которые указывают на краткосрочные изменения в рабочей машине 100 или орудии 300, 400, которые не вызваны существенным изменением уклона расположенной снизу поверхности 136. В качестве одного неисключительного примера контроллер 608 может отслеживать датчики 138, 308 относительно продолжительных изменений и игнорировать краткосрочные изменения, которые могут быть вызваны мусором на расположенной снизу поверхности 136 или тому подобным. В блоке 1104 контроллер 608 может отслеживать датчик 308 орудия, чтобы идентифицировать любые продолжительные перемещения орудия 300, 400. Длительное перемещение может представлять собой любое перемещение, которое сохраняется в течение достаточного периода времени, чтобы указывать на изменение уклона в расположенной снизу поверхности 136, а не на мусор.
В блоке 1104, если перемещение, идентифицированное датчиком 308 орудия, не продолжается, контроллер 608 определит, что перемещение было вызвано мусором или тому подобным, и вернется к блоку 1102, чтобы продолжить отслеживание датчиков 138, 308. Однако, если перемещение, идентифицированное датчиком 308 орудия, продолжается, контроллер 608 может проверить, зафиксировал ли датчик 138 рабочей машины также перемещение в блоке 1106. В блоке 1106 контроллер 608 может проверить, было ли перемещение орудия 300, 400 вызвано перемещением рабочей машины 100. Если датчик 138 рабочей машины указывает на аналогичное перемещение, как и датчик 308 орудия, контроллер может сделать вывод, что никаких дальнейших действий не требуется, и продолжать отслеживать датчики 138, 308 в блоке 1102.
Однако, если контроллер 608 определяет, что рабочая машина 100 не испытывала аналогичного перемещения в блоке 1106, контроллер 608 может манипулировать положением орудия 300, 400 с помощью системы 152 позиционирования орудия для того, чтобы откорректировать перемещение орудия 300, 400. Более конкретно, в примере на Фиг. 10, когда орудие 300, 400 находится в секции 1008 с частичным наклоном, а рабочая машина 100 находится в плоской секции 1006, контроллер 608 будет идентифицировать продолжительное изменение высоты орудия 300, 400 с помощью датчика 308 орудия в блоке 1104. Кроме того, контроллер 608 проверит датчик 138 рабочей машины и идентифицирует, что рабочая машина 100 не вызывала перемещение орудия 300, 400 в блоке 1106. Соответственно, в этом неисключительном примере блока 1108 контроллер 608 может соотносить увеличение высоты орудия 300, 400 с наклоном в расположенной снизу поверхности 136. Кроме того, чтобы не повредить расположенную снизу поверхность и орудие 300, 400, контроллер 608 может задействовать верхнюю тягу 302, чтобы изменить наклон 304 орудия 300, 400, чтобы соответствовать наклону в уклоне.
После того как контроллер 608 изменил ориентацию орудия 300, 400 в блоке 1108, контроллер 608 может продолжить отслеживать датчик 138 рабочей машины, чтобы определить, когда рабочая машина 100 вошла в изменение 1004 уклона в блоке 1110. Более конкретно, контроллер 608 может повторно проверять датчик 138 рабочей машины, чтобы идентифицировать, когда рабочая машина 100 находится на изменении 1004 уклона. Когда рабочая машина 100 входит в изменение 1004 уклона, датчик 138 рабочей машины будет указывать на продолжительное перемещение рабочей машины 100, когда колеса 1012 попадут в секцию 1008 с частичным наклоном. Кроме того, когда колеса 1012 перемещаются вверх по секции 1008 с частичным наклоном, рабочая машина 100 и орудие 300, 400 могут одновременно занимать изменение 1004 уклона и находиться на по существу одной части расположенной снизу поверхности 136.
Как только контроллер 608 идентифицирует, что рабочая машина 100 вошла в изменение 1004 уклона в блоке 1110, контроллер 608 может задействовать систему 152 позиционирования орудия, чтобы вернуть орудие в требуемое положение орудия в блоке 1112. Другими словами, в блоке 1112 контроллер 608 может идентифицировать, что рабочая машина 100 и орудие 300, 400 занимают по существу плоскую поверхность и вернет положение орудия в требуемое положение орудия (то есть в требуемое положение орудия, установленное на Фиг. 8). После того как орудие 300, 400 вернется в требуемое положение в блоке 1112, контроллер 608 может вернуться к блоку 1102 и продолжить отслеживать датчики 138, 308 относительно дальнейших изменений уклона.
Хотя вариант осуществления, показанный и описанный в настоящем документе для Фиг. 10 и 11, относится к рабочей машине 100, приближающейся к наклону в расположенной снизу поверхности 136, специалист в данной области техники поймет, что раскрытые идеи также можно применять, когда рабочая машина 100 приближается к cпуску расположенной снизу поверхности 136. Более конкретно, при приближении к cпуску в уклоне контроллер 608 может идентифицировать снижение высоты орудия 300, 400 относительно рабочей машины 100. Снижение высоты может быть устранено путем наклонения наклона 304 орудия 300, 400 вперед, чтобы более точно следовать рельефу спуска расположенной снизу поверхности 136 до тех пор, пока рабочая машина 100 также не окажется на спуске. Соответственно, это изобретение предусматривает использование идей, рассматриваемых в данном документе, для манипулирования ориентацией орудия 300, 400 для устранения любых продолжительных изменений в расположенной снизу поверхности 136, чтобы позволить орудию 300, 400 оставаться в требуемом положении относительно расположенной снизу поверхности 136.
Хотя два разных орудия 300, 400 показаны и описаны в данном документе, это изобретение не ограничено этими конкретными орудиями. Жатки полотенного или роторного типа представляют собой лишь пару из множества потенциальных типов жаток, которые могут быть соединены с рабочей машиной 100. Соответственно, это изобретение не должно быть ограничено каким–либо конкретным типом жатки.
Хотя это изобретение было описано в отношении по меньшей мере одного варианта осуществления, настоящее изобретение может быть дополнительно модифицировано в рамках сущности и объема. Следовательно, эта заявка охватывает любые изменения, использования или адаптация изобретения, использующих его общие принципы. Кроме того, эта заявка предназначена охватывать такие отклонения от настоящего изобретения, которые подпадают под известную или обычную практику в области техники, к которой она относится, и которые попадают в рамки приложенной формулы изобретения.
Реферат
Группа изобретений относится к области сельскохозяйственных устройств. Рабочая машина содержит орудие, соединенное с рабочей машиной, и первый датчик, соединенный с орудием. Первый датчик идентифицирует ориентацию орудия вдоль более чем одной оси и ускорение орудия. Способ идентификации ориентации орудия состоит в обеспечении первого датчика, соединенного с орудием, контроллером и рабочей машиной, передаче в контроллер с помощью первого датчика положения наклона орудия и положения крена орудия, и передаче ускорения орудия в контроллер посредством первого датчика. Система ориентации орудия для рабочей машины содержит рабочую машину, орудие, соединенное с рабочей машиной, контроллер, первый датчик, соединенный с орудием и передающий положение орудия вдоль более чем одной оси и ускорение орудия в контроллер, второй датчик, соединенный с рабочей машиной и передающий положение рабочей машины в контроллер. Контроллер сравнивает положение орудия с положением рабочей машины, чтобы идентифицировать ориентацию и ускорение орудия относительно расположенной снизу поверхности. Обеспечивается возможность манипулирования ориентацией орудия для устранения любых продолжительных изменений в расположенной снизу поверхности, чтобы позволить орудию оставаться в требуемом положении относительно расположенной снизу поверхности. 3 н. и 16 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для определения высоты для сельскохозяйственной техники
Комментарии