Устройство автоматического позиционирования автосцепки - RU2666085C2
Код документа: RU2666085C2
Чертежи









Описание
Область техники, к которой относится изобретение
Настоящее раскрытие направлено на автосцепки для железнодорожных вагонов, и конкретнее на устройство для автоматического горизонтального позиционирования автосцепки железнодорожного вагона.
Уровень техники
Железнодорожные вагоны включают в себя автосцепки для соединения смежных вагонов друг с другом для образования состава поезда. Каждая автосцепка выполнена с возможностью поворота в пределах заданного углового диапазона в горизонтальном направлении для облегчения сцепления вагонов и перемещения по криволинейному пути. Соседние автосцепки вагонов в общем выравниваются, чтобы находиться по центру с продольной осью железнодорожного вагона во время процедуры сцепления вагонов. Из-за различий размеров вагонов и типа автосцепки, установленной на каждом вагоне, могут существовать значительные горизонтальные смещения между смежными автосцепками в боковых направлениях железнодорожного вагона. Такие горизонтальные смещения дополнительно усугубляются при попытке сцепления смежных железнодорожных вагонов на криволинейном участке железнодорожного пути. Для случаев, в которых сцепление на криволинейном пути является необходимым, обычно требуется ручной поворот.
Существующие автосцепки используют устройства позиционирования автосцепки с пневмо- или гидроприводом, способные перемещать автосцепку вагона в пределах заданного углового диапазона в горизонтальном направлении. Выравнивание автосцепки достигается с помощью ручного ввода данных управления от оператора. До появления гидравлических и пневматических устройств позиционирования автосцепки позиционирование автосцепки выполнялось с помощью центрирующих элементов пружины, имеющих точки крепления на головке автосцепки и корпусе вагона. Конструкция пружины выравнивает автосцепку с продольной осью вагона для обеспечения сцепления на прямых участках пути. Для того чтобы соединять смежные вагоны на криволинейном участке пути, пружины разъединяются для обеспечения ручного перемещения автосцепки на первом железнодорожном вагоне в выравнивание с автосцепкой на смежном втором железнодорожном вагоне.
Несколько существующих устройств позиционирования автосцепки известны в уровне техники. Каждое известное устройство позиционирования автосцепки требует ручной помощи при сцеплении на криволинейном участке пути. Некоторые из существующих устройств позиционирования автосцепки требуют механического соединения с тележкой, которое является нежелательным, так как оно требует взаимодействия с тележкой и потенциально создает большие силы на тележке во время столкновения, которое возникает при сцеплении вагонов. Одно такое устройство позиционирования автосцепки представляет собой пневматическое центрирующее устройство, которое использует цилиндры для обеспечения того, что автосцепка удерживается по центру относительно тележки и корпуса вагона железнодорожного транспортного средства. Цилиндры толкают пластины, функционально соединенные с автосцепкой. Путем толкания пластин автосцепка удерживается в центральном положении. Если автосцепка перемещается в горизонтальной плоскости по направлению к одному из цилиндров, этот цилиндр будет толкать одну из пластин и толкать автосцепку обратно в положение по центру. Это устройство позиционирования автосцепки не используется для позиционирования автосцепки в смещенном от центра положении. Подобным образом, другое устройство позиционирования автосцепки всегда удерживает автосцепку в центральном положении. Это устройство позиционирования автосцепки включает в себя цилиндры, которые функционально соединены с реечно-шестеренной системой, которая перемещается латерально относительно автосцепки. При перемещении автосцепки в одном направлении противоположный цилиндр толкает реечно-шестеренную систему по направлению к себе для того, чтобы помещать автосцепку обратно в центральное положение. Наконец, другое устройство позиционирования автосцепки использует традиционную механическую конструкцию для удержания автосцепки по центру относительно корпуса железнодорожного транспортного средства. В этом устройстве позиционирования автосцепки пружины соединены с железнодорожным транспортным средством на одном конце и соединены с автосцепкой на противоположном конце. При перемещении автосцепки в смещенном от центра направлении первая пружина оттягивается в смещенном от центра направлении. Как только автосцепка прекращает перемещение, противоположная пружина тянет автосцепку обратно в центральное положение. Все из этих устройств позиционирования автосцепки используются для удержания автосцепки в центральном положении для обеспечения сцепления автосцепки со смежной автосцепкой на прямом участке пути. Ни одно из них не предполагает перемещение и поддержание автосцепки в смещенном от центра положении.
Раскрытие изобретения
Ни одно из устройств позиционирования, рассмотренных выше, не использует автоматическое средство для позиционирования автосцепки в смещенном от центра положении для обеспечения сцепления автосцепки со смежной автосцепкой на криволинейном участке пути. Существующие конструкции для устройств позиционирования автосцепки выполнены без возможности автоматического выравнивания автосцепок смежных железнодорожных вагонов. Традиционные устройства позиционирования автосцепки требуют ручного ввода данных от оператора для того, чтобы позиционировать смежные автосцепки в выравнивании с возможностью сцепления на криволинейных участках пути. Дополнительно традиционные устройства позиционирования автосцепки могут только центрировать автосцепку относительно плоскости, перпендикулярной поверхности установки для крепления автосцепки. С учетом вышеупомянутого, существует необходимость устройства позиционирования автосцепки, которое автоматически позиционирует автосцепку для автоматического сцепления на основе входных данных, принимаемых от контроллера. Существует дополнительная необходимость обеспечения устройства позиционирования автосцепки, которое является автоматически регулируемым с возможностью выравнивания смежных автосцепок на прямых или криволинейных путях. Существует дополнительная необходимость устройства автоматического позиционирования автосцепки, которое является автономным. Ручное отцепление устройства автоматического позиционирования автосцепки является необязательным для ручного позиционирования во время обслуживания автосцепки.
В соответствии с одним вариантом выполнения обеспечено устройство автоматического позиционирования автосцепки для облегчения горизонтального выравнивания автосцепки независимо от того, расположен ли железнодорожный вагон на прямом пути или криволинейном пути. Устройство автоматического позиционирования автосцепки включает в себя контроллер для управления выравниванием автосцепки в ответ на сигнал, принимаемый от железнодорожного вагона и тележки железнодорожного вагона.
В соответствии с другим вариантом выполнения устройство автоматического позиционирования автосцепки выполнено с возможностью выполнения работы по автоматическому позиционированию автосцепки относительно смежной автосцепки без необходимости ручной помощи. В другом варианте выполнения автоматическую работу можно миновать путем отцепления устройства автоматического позиционирования автосцепки на головке автосцепки без использования каких-либо инструментов для ручного выравнивания автосцепки, которое может быть легко выполнено одним оператором.
В другом варианте выполнения автосцепка для железнодорожного вагона может включать в себя крепление автосцепки, механизм автосцепки, поворачиваемый относительно крепления автосцепки из положения по центру в смещенное от центра положение по существу в горизонтальной плоскости, и устройство позиционирования автосцепки для поворачивания механизма автосцепки относительно крепления автосцепки. Устройство позиционирования автосцепки может включать в себя контроллер, выполненный с возможностью приема сигнальной информации от тележки, относящейся к угловому положению тележки относительно корпуса железнодорожного вагона, и по меньшей мере один пневматический цилиндр для поворачивания механизма автосцепки. Контроллер может управлять работой указанного по меньшей мере одного пневматического цилиндра в ответ на сигнальную информацию, принимаемую от тележки.
Указанный по меньшей мере один пневматический цилиндр может включать в себя первый пневматический цилиндр и второй пневматический цилиндр. Каждый пневматический цилиндр может независимо управляться контроллером. Первый конец указанного по меньшей мере одного пневматического цилиндра может быть расположен на креплении автосцепки, а второй конец указанного по меньшей мере одного пневматического цилиндра может быть расположен на механизме автосцепки. Разобщительный кран может быть расположен на механизме автосцепки. Разобщительный кран может быть выполнен с возможностью выпуска текучей среды под давлением из указанного по меньшей мере одного пневматического цилиндра для обеспечения ручного позиционирования механизма автосцепки. Механический переключатель может быть расположен на механизме автосцепки. Механический переключатель может быть выполнен с возможностью обнаружения сцепления автосцепки со смежной автосцепкой. При активации механического переключателя указанный по меньшей мере один пневматический цилиндр может быть изолирован, и текучая среда под давлением может быть выпущена из него. Контроллер может включать в себя по меньшей мере один магнитный клапан, расположенный на одной линии по меньшей мере с одним преобразователем давления. Указанный по меньшей мере один преобразователь давления может быть выполнен с возможностью ретрансляции электрического сигнала к контроллеру на основе величины давления, подаваемого к указанному по меньшей мере одному пневматическому цилиндру. По меньшей мере один линейный преобразователь может быть функционально соединен с контроллером и указанным по меньшей мере одним пневматическим цилиндром. Указанный по меньшей мере один линейный преобразователь может быть выполнен с возможностью ретрансляции электрического сигнала к контроллеру на основе линейного смещения указанного по меньшей мере одного пневматического цилиндра.
В другом варианте выполнения автосцепка железнодорожного вагона для сцепления железнодорожных вагонов может включать в себя крепление автосцепки, соединенное с корпусом железнодорожного вагона, механизм автосцепки, поворачиваемый относительно крепления автосцепки из положения по центру в смещенное от центра положение по существу в горизонтальной плоскости, и устройство позиционирования автосцепки для центрирования механизма автосцепки относительно крепления автосцепки. Устройство позиционирования автосцепки может включать в себя контроллер, выполненный с возможностью приема сигнальной информации от тележки, относящейся к угловому положению тележки относительно корпуса железнодорожного вагона, и по меньшей мере один пневматический цилиндр для поворачивания механизма автосцепки. Контроллер может управлять работой указанного по меньшей мере одного пневматического цилиндра в ответ на сигнальную информацию, принимаемую от тележки.
Указанный по меньшей мере один пневматический цилиндр может включать в себя первый пневматический цилиндр и второй пневматический цилиндр. Каждый пневматический цилиндр может независимо управляться контроллером. Первый конец указанного по меньшей мере одного пневматического цилиндра может быть расположен на креплении автосцепки, а второй конец указанного по меньшей мере одного пневматического цилиндра может быть расположен на механизме автосцепки. Разобщительный кран может быть расположен на механизме автосцепки. Разобщительный кран может быть выполнен с возможностью выпуска текучей среды под давлением из указанного по меньшей мере одного пневматического цилиндра для обеспечения ручного позиционирования механизма автосцепки. Механический переключатель может быть расположен на механизме автосцепки. Механический переключатель может быть выполнен с возможностью обнаружения сцепления автосцепки со смежной автосцепкой. При активации механического переключателя указанный по меньшей мере один пневматический цилиндр может быть изолирован, и текучая среда под давлением может быть выпущена из него. Контроллер может включать в себя по меньшей мере один магнитный клапан, расположенный на одной линии по меньшей мере с одним преобразователем давления. Указанный по меньшей мере один преобразователь давления может быть выполнен с возможностью ретрансляции электрического сигнала к контроллеру на основе величины давления, подаваемого к указанному по меньшей мере одному пневматическому цилиндру. По меньшей мере один линейный преобразователь может быть функционально соединен с контроллером и указанным по меньшей мере одним пневматическим цилиндром. Указанный по меньшей мере один линейный преобразователь может быть выполнен с возможностью ретрансляции электрического сигнала к контроллеру на основе линейного смещения указанного по меньшей мере одного пневматического цилиндра.
В другом варианте выполнения способ автоматического позиционирования автосцепки железнодорожного вагона может включать в себя этапы, на которых измеряют угловое положение тележки относительно корпуса железнодорожного вагона, передают сигнальную информацию, относящуюся к угловому положению тележки, контроллеру, и регулируют давление, обеспечиваемое по меньшей мере для одного пневматического цилиндра, функционально соединенного с автосцепкой, на основе сигнальной информации, принимаемой контроллером, тем самым позиционируют автосцепку в требуемом положении по существу в горизонтальной плоскости. Указанный по меньшей мере один пневматический цилиндр может включать в себя первый пневматический цилиндр и второй пневматический цилиндр. Контроллер может быть выполнен с возможностью регулировки давления каждого пневматического цилиндра независимо друг от друга.
Эти и другие признаки и характеристики устройства автоматического позиционирования автосцепки, а также способы работы и функции соответствующих элементов конструкций, сочетание частей и организация производства станут более очевидными при рассмотрении следующего далее описания и приложенной формулы изобретения со ссылкой на сопровождающие чертежи, все из которых образуют часть этого описания, причем одинаковые ссылочные позиции обозначают соответствующие части на различных фигурах. Однако следует ясно понимать, что чертежи представлены только с целью иллюстрации и описания, и не предназначены для определения ограничений изобретения. Как используется в описании и формуле изобретения, форма единственного числа включает в себя множественные ссылки, если контекст ясно не указывает иное.
Краткое описание чертежей
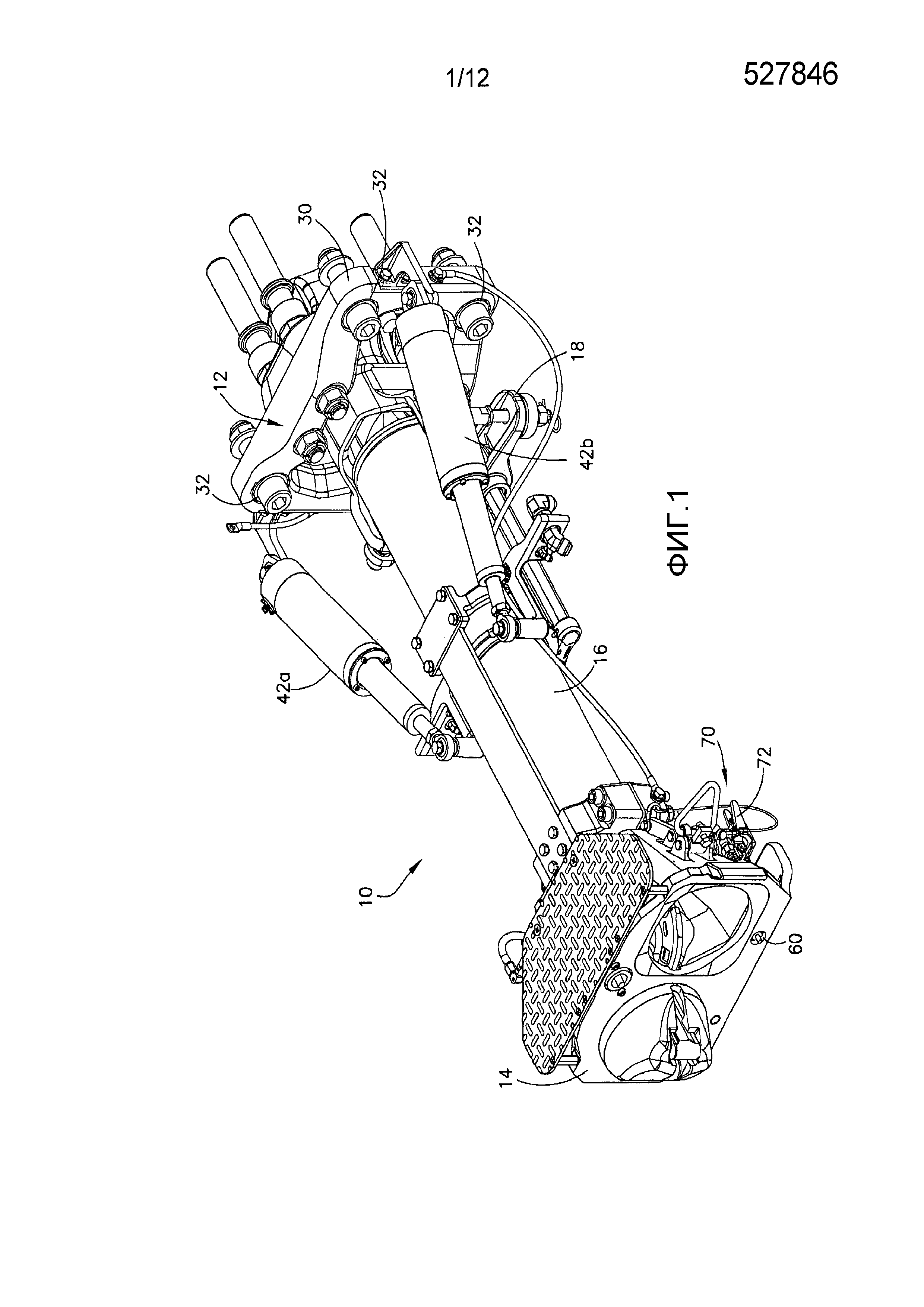
Фиг. 1 представляет собой вид спереди в перспективе устройства автоматического позиционирования автосцепки в соответствии с одним вариантом выполнения.
Фиг. 2 представляет собой вид сбоку устройства автоматического позиционирования автосцепки на Фиг. 1.
Фиг. 3 представляет собой вид снизу устройства автоматического позиционирования автосцепки на Фиг. 1.
Фиг. 4 представляет собой вид спереди устройства автоматического позиционирования автосцепки на Фиг. 1.
Фиг. 5 представляет собой вид сбоку в перспективе клапана разобщительного крана устройства автоматического позиционирования автосцепки на Фиг. 1.
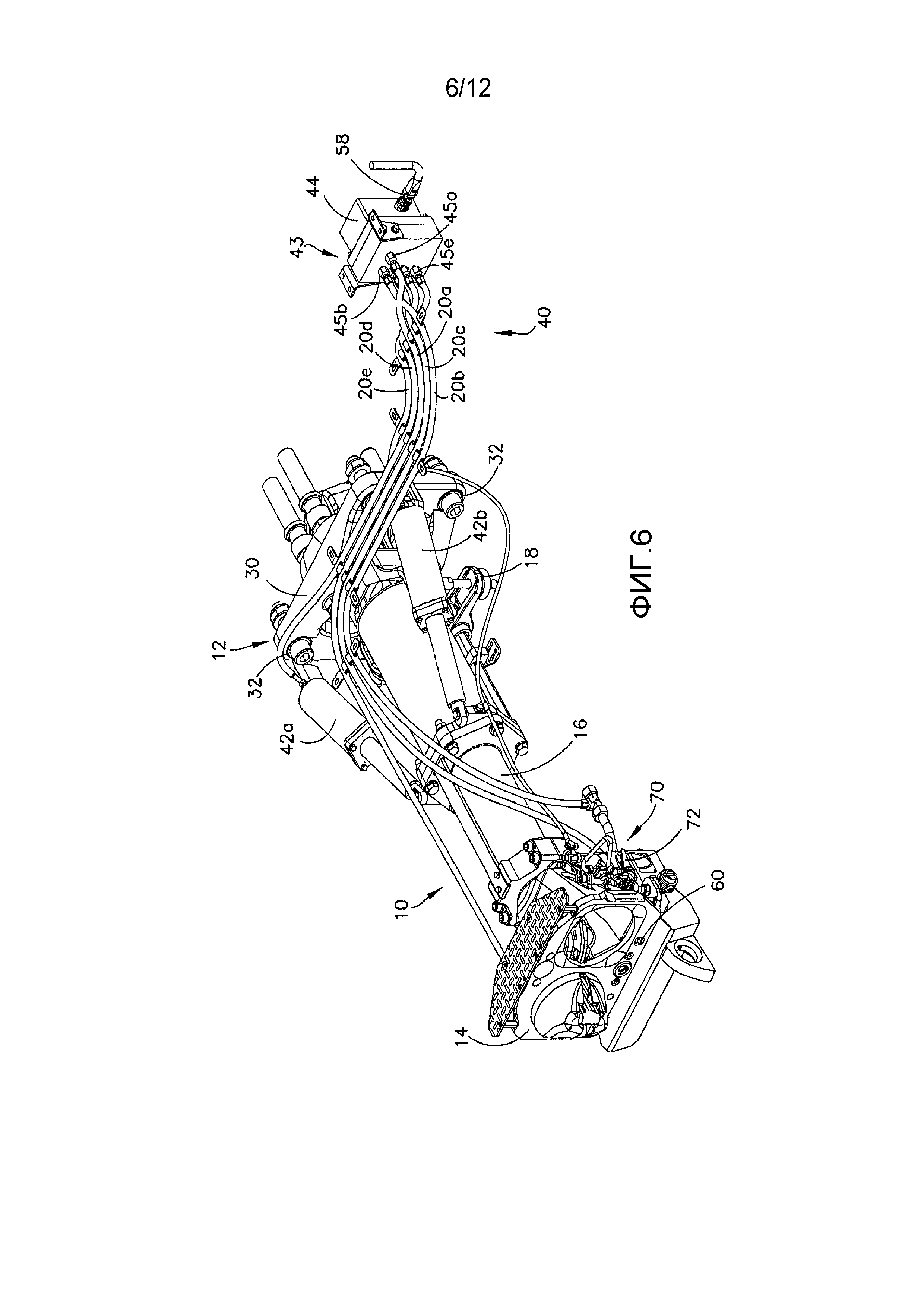
Фиг. 6 представляет собой вид спереди в перспективе устройства автоматического позиционирования автосцепки на Фиг. 1 вместе с контроллером для устройства автоматического позиционирования автосцепки.
Фиг. 7 представляет собой вид спереди в перспективе контроллера на Фиг. 6.
Фиг. 8 представляет собой вид сбоку контроллера на Фиг. 6.
Фиг. 9 представляет собой вид сзади контроллера на Фиг. 6.
Фиг. 10 представляет собой вид снизу устройства автоматического позиционирования автосцепки на Фиг. 1 в положении по центру.
Фиг. 11 представляет собой вид снизу устройства автоматического позиционирования автосцепки на Фиг. 1 в смещенном от центра положении.
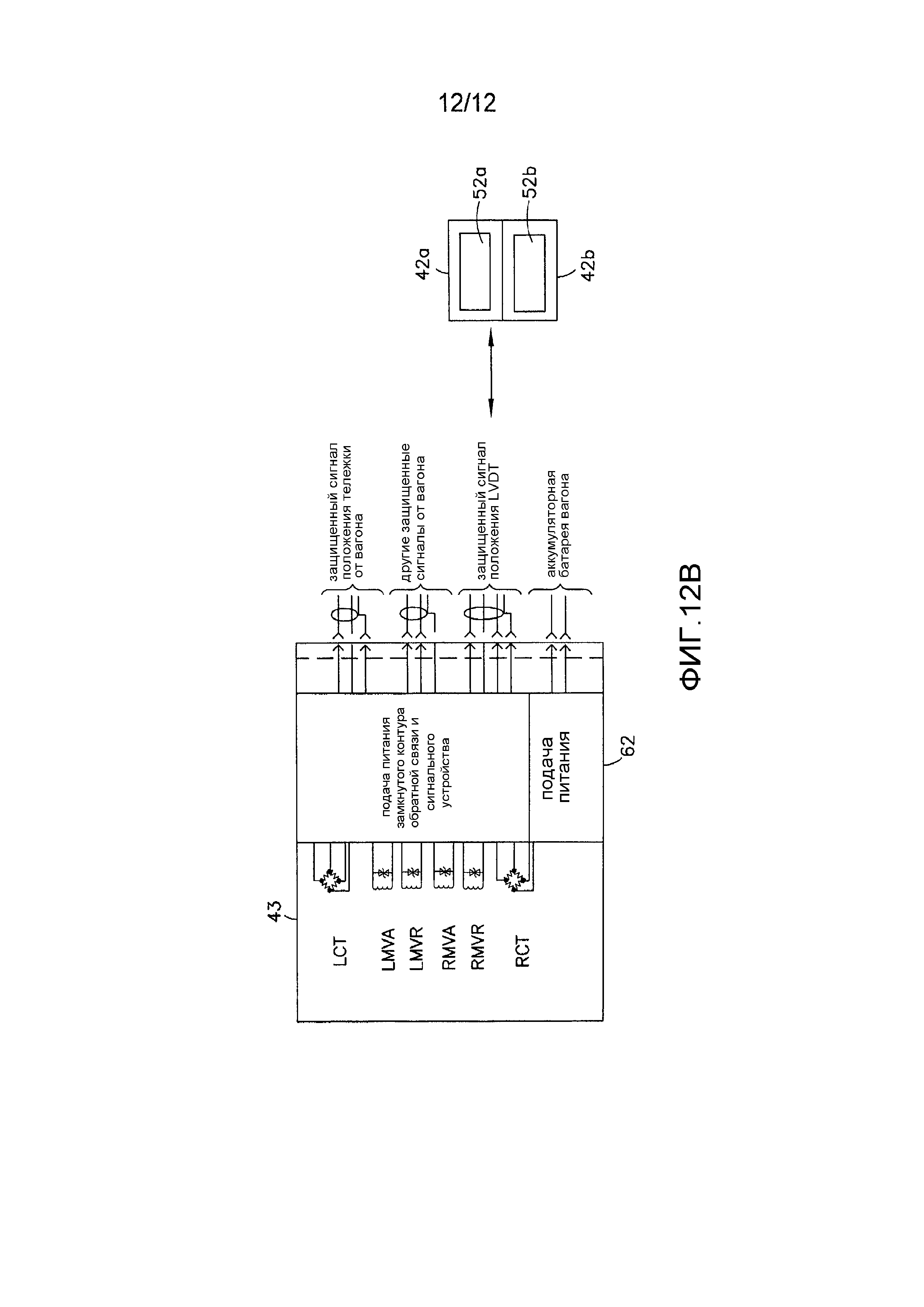
Фиг. 12А и 12B представляют собой схематические виды контроллера, выполненного с возможностью использования с устройством автоматического позиционирования автосцепки.
Описание предпочтительных вариантов выполнения
В целях описания далее выражения «более высокий», «более низкий», «правый», «левый», «вертикальный», «горизонтальный», «верхний», «нижний», «боковой», «продольный» и их производные будут относиться к изобретению так, как оно ориентировано на чертежах. Однако следует понимать, что изобретение может принимать различные альтернативные вариации и последовательности этапов, за исключением случаев, когда ясно определено обратное. Также следует понимать, что конкретные устройства и процессы, проиллюстрированные на приложенных чертежах и описанные в следующем далее описании, представляют собой просто примерные варианты выполнения изобретения. Следовательно, конкретные размеры и другие физические характеристики, относящиеся к вариантам выполнения, раскрытым здесь, не следует рассматривать как ограничивающие.
Со ссылкой на чертежи, на которых одинаковые ссылочные обозначения относятся к одинаковым частям на всех их нескольких видах, настоящее раскрытие в общем направлено на автосцепку железнодорожного вагона, имеющую устройство автоматического позиционирования автосцепки для регулировки выравнивания автосцепки в горизонтальной плоскости в боковых направлениях железнодорожного вагона.
Вначале на Фиг. 1-5 показан вариант выполнения автосцепки 10. Автосцепка 10, которая описана здесь, предназначена для соединения с рамой железнодорожного вагона (не показана), как будет очевидно специалисту в уровне техники рельсовых транспортных средств. Автосцепка 10 выполнена с возможностью использования в железнодорожных транспортных средствах, используемых для перевозки пассажиров и/или грузов. Однако это использование предназначено быть не ограничивающим, а автосцепка 10 имеет применения в общем в железнодорожных вагонах. Автосцепка 10 в изображенном варианте выполнения в общем включает в себя крепление 12 автосцепки, механизм 14 автосцепки, регенеративную капсулу 16 и энергопоглощающую вертикальную опору 18. Головка автосцепки (не показана) сцеплена с механизмом 14 автосцепки с возможностью соединения железнодорожного вагона со смежным железнодорожным вагоном. Регенеративная капсула 16 соединяет механизм 14 автосцепки с креплением 12 автосцепки путем соединения с вертикальной опорой 18.
Крепление 12 автосцепки имеет корпус 30 крепления по существу в форме прямоугольника, который усечен с его боковых сторон. Передняя поверхность корпуса 30 крепления образует множество отверстий 32 для установки крепления, которые принимают крепежные элементы (не показаны) для взаимодействия и крепления корпуса 30 крепления к раме вагона железнодорожного вагона. Корпус 30 крепления шарнирно поддерживает механизм 14 автосцепки, регенеративную капсулу 16 и вертикальную опору 18. Механизм 14 автосцепки, регенеративная капсула 16 и вертикальная опора 18 являются поворачиваемыми в горизонтальной плоскости в любом направлении от продольной оси 2 железнодорожного вагона. Механизм 14 автосцепки, регенеративная капсула 16 и вертикальная опора 18 могут поворачиваться в пределах заданного углового диапазона из положения по центру, которое по существу параллельно с продольной осью 2. Как показано на Фиг. 10 и 11, механизм 14 автосцепки, регенеративная капсула 16 и вертикальная опора 18 могут оставаться в положении по центру вдоль продольной оси 2 (Фиг. 10) или поворачиваться в смещенное от центра положение под углом α в сторону от продольной оси 2 (Фиг. 11). Специалистом в области техники будет принято во внимание, что угол α является только примерным, и что механизм 14 автосцепки, регенеративная капсула 16 и вертикальная опора 18 могут поворачиваться в любое угловое положение, смещенное от положения по центру на любой боковой стороне продольной оси 2.
На Фиг. 6 автосцепка 10 дополнительно включает в себя устройство 40 автоматического позиционирования автосцепки для выравнивания автосцепки первого железнодорожного вагона с возможностью сцепления с автосцепкой смежного железнодорожного вагона. Устройство 40 автоматического позиционирования автосцепки выполнено с возможностью автоматического выравнивания автосцепки для облегчения сцепления смежных железнодорожных вагонов на прямых или криволинейных участках пути без необходимости какого-либо ручного ввода данных.
На Фиг. 6-9 устройство 40 автоматического позиционирования автосцепки включает в себя пару пневматических цилиндров 42a, 42b и контроллер 43 для автоматического горизонтального позиционирования отцепленной автосцепки на основе входного сигнала от корпуса вагона и тележки вагона. Каждый пневматический цилиндр 42a, 42b соединен с креплением 12 автосцепки или корпусом железнодорожного вагона на одном конце и с автосцепкой 10 на противоположном конце. Фиг. 6 иллюстрирует пневматические цилиндры 42a, 42b, соединенные в приблизительной центральной точке продольной длины автосцепки 10. В другом варианте выполнения пневматические цилиндры 42a, 42b могут быть соединены ближе или дальше от оконечного конца автосцепки 10. Каждый пневматический цилиндр 42a, 42b включает в себя поршень, который является продольно подвижным в ответ на изменение давления внутри цилиндра. Повышение давления внутри пневматического цилиндра 42a, 42b заставляет поршень выдвигаться из цилиндра, а понижение давления внутри пневматического цилиндра 42a, 42b заставляет поршень втягиваться в цилиндр. Пневматические цилиндры 42a, 42b принимают воздух под давлением из пневматической системы железнодорожного вагона. Пневматические шланги 20a, 20b, 20c, 20d, 20e могут использоваться для обеспечения текучей среды под давлением к пневматической системе железнодорожного вагона.
В одном варианте выполнения контроллер 43 независимо регулирует работу каждого пневматического цилиндра 42a, 42b. Контроллер 43 принимает сигналы от тележки железнодорожного транспортного средства для управления работой пневматических цилиндров 42a, 42b в ответ на принимаемый сигнал. Контроллер 43 управляет работой пневматических цилиндров 42a, 42b путем повышения давления в цилиндрах, чтобы заставлять поршень выдвигаться из цилиндра, или сброса давления в цилиндрах, чтобы заставлять поршень втягиваться в цилиндр.
Контроллер 43 показан более подробно на Фиг. 12A и 12B. Рассмотрение работы контроллера 43 рассмотрено ниже. Контроллер 43 включает в себя корпус 44, который удерживает компоненты контроллера 43. Множество входных каналов 45a, 45b, 45c, 45d, 45e пневматических шлангов образованы в корпусе 44 контроллера 43. Входные каналы 45a, 45b, 45c, 45d, 45e выполнены с возможностью приема конца каждого пневматического шланга 20a, 20b, 20c, 20d, 20e. Множество магнитных клапанов 46a, 46b, 46c, 46d используются в контроллере 43 для направления воздуха под давлением к требуемому пневматическому цилиндру 42a, 42b через пневматические шланги 20a, 20b, 20c, 20d, 20e. Каждый магнитный клапан 46a, 46b, 46c, 46d выполнен с возможностью открытого положения и закрытого положения. В одном варианте выполнения два магнитных клапана 46a, 46b функционально соединены с одним пневматическим цилиндром 42а, а два дополнительных магнитных клапана 46c, 46d функционально соединены с другим пневматическим цилиндром 42b. Следует понимать, однако, что специалист в области техники будет принимать во внимание, что большее количество магнитных клапанов может использоваться в контроллере 43, или меньшее количество магнитных клапанов может использоваться в контроллере 43. Также следует понимать, что различные конструкции магнитных клапанов 46a, 46b, 46c, 46d также предусматриваются. Резервуар 48a, 48b расположен на одной линии с каждым пневматическим цилиндром 42a, 42b. Резервуары 48a, 48b могут удерживать любой избыточный воздух под давлением, который избыточно подается к пневматическим цилиндрам 42a, 42b, и/или могут удерживать дополнительную подачу воздуха под давлением для компенсации любых утечек, которые возникают внутри контроллера 43 или пневматических цилиндров 42a, 42b.
В одном варианте выполнения преобразователи 50a, 50b давления могут быть расположены на одной линии с пневматическими цилиндрами 42a, 42b. На основе подаваемого давления преобразователи 50a, 50b давления могут передавать электрический сигнал контроллеру 43, ретранслирующий количество воздуха под давлением, подаваемого к пневматическим цилиндрам 42a, 42b. В другом варианте выполнения линейные преобразователи 52a, 52b могут использоваться с устройством 40 автоматического позиционирования автосцепки. Линейные преобразователи 52a, 52b могут быть расположены на пневматических цилиндрах 42a, 42b. Линейные преобразователи 52a, 52b могут использоваться для передачи электрического сигнала контроллеру 43 для сообщения расстояния, на которое каждый пневматический цилиндр 42a, 42b либо выдвинулся, либо втянулся, на основе давления, подаваемого к пневматическим цилиндрам 42a, 42b. Линейные преобразователи предпочтительны для использования с устройством 40 автоматического позиционирования автосцепки, так как линейные преобразователи обеспечивают более точное измерение по сравнению с преобразователями давления. В еще одном варианте выполнения преобразователи 50a, 50b давления и линейные преобразователи 52a, 52b могут использоваться вместе для передачи электрических сигналов контроллеру 43 для сообщения величины давления, подаваемого к пневматическим цилиндрам 42a, 42b, и расстояния, на которое пневматические цилиндры 42a, 42b либо выдвинулись, либо втянулись, за счет давления, подаваемого к пневматическим цилиндрам 42. С помощью использования и преобразователей 50a, 50b давления, и линейных преобразователей 52a, 52b создается бесперебойная конфигурация. В этом варианте выполнения, если преобразователи 50a, 50b давления выйдут из строя из-за неисправного соединения, износа или отсоединения от контроллера 43, линейные преобразователи 52a, 52b будут по-прежнему способны передавать электрический сигнал контроллеру 43 для сообщения расстояния, на которое пневматические цилиндры 42a, 42b либо выдвинулись, либо втянулись. Подобным образом, если линейные преобразователи 52a, 52b выйдут из строя, преобразователи 50a, 50b давления будут по-прежнему доступны для передачи электрического сигнала контроллеру 43. Несмотря на то, что было рассмотрено использование преобразователей давления и линейных преобразователей, следует понимать, что дополнительные типы преобразователей могут использоваться с контроллером 43, такие как электрические, механические или термические преобразователи в числе прочих.
Выпускные отверстия 54a, 54b образованы в корпусе 44 контроллера 43 и могут использоваться для выпуска избыточного воздуха под давлением из контроллера 43. По меньшей мере одна заслонка 56a, 56b, 56c, 56d, обеспеченная в контроллере 43, может использоваться для уменьшения потока воздуха под давлением через контроллер 43. В одном варианте выполнения заслонки 56a, 56b, 56c, 56d расположены за магнитными клапанами 46a, 46b, 46c, 46d соответственно. Корпус 44 контроллера 43 также включает в себя отверстие 58 для входного сигнала тележки, которое используется для приема сигнала от тележки, ретранслирующего угловую ориентацию железнодорожного вагона и тележки железнодорожного вагона.
Как изображено на схеме на Фиг. 12B, контроллер 43 включает в себя подачу питания замкнутого контура обратной связи и сигнального устройства. Подача питания замкнутого контура обратной связи и сигнального устройства принимает сигналы от тележки и в одном варианте выполнения раскрытия от линейных преобразователей 52a, 52b. На схеме линейные преобразователи 52a, 52b сцеплены с пневматическими цилиндрами 42a, 42b соответственно. Другие сигналы от железнодорожного вагона также передаются подаче питания замкнутого контура обратной связи и сигнального устройства. Преобразователь 42b (LCT) давления левого цилиндра и преобразователь 42a (RCT) давления правого цилиндра показаны в сообщении с подачей питания замкнутого контура обратной связи и сигнального устройства. Включение (LMVA) левого магнитного клапана и включение (RMVA) правого магнитного клапана также находятся в сообщении с замкнутым контуром обратной связи и сигнальным устройством. Также в сообщении с замкнутым контуром обратной связи и сигнальным устройством находятся выключение (LMVR) левого магнитного клапана и выключение (RMVR) правого магнитного клапана. Подача 62 питания контроллера 43 подается в одном варианте выполнения раскрытия с помощью аккумуляторной батареи вагона. Однако следует понимать, что любой другой пригодный источник питания может использоваться вместо аккумуляторной батареи вагона.
После сцепления смежных автосцепок часто желательно, чтобы автосцепки могли свободно перемещаться без сопротивления от устройства 40 автоматического позиционирования автосцепки. С помощью подачи воздуха под давлением к автосцепкам после сцепления автосцепки могут оставаться жесткими и не способными перемещаться из стороны в сторону относительно кривой на пути. В связи с этим важно обеспечивать, чтобы автосцепки не удерживались жесткими, но вместо этого имели возможность свободно перемещаться для прохождения любых кривых на пути. При сцеплении механический переключатель 60 на механизме 14 автосцепки обнаруживает сцепление автосцепки со смежной автосцепкой и реагирует на эти входные данные путем изоляции или перекрытия воздуха под давлением к пневматическим цилиндрам 42a, 42b. Текучая среда под давлением в пневматических цилиндрах 42a, 42b выпускается. Это позволяет сцепленным автосцепкам свободно поворачиваться во время перемещения поезда без сопротивления от устройства 40 автоматического позиционирования автосцепки.
Также может быть желательно обеспечивать ручное перемещение автосцепки 10, минуя работу механизма 40 автоматического позиционирования автосцепки. Такая работа в особенности предпочтительна во время обслуживания автосцепки 10. Для облегчения такой работы устройство 40 автоматического позиционирования автосцепки оборудовано разобщительным краном 70, расположенным на механизме 14 автосцепки, который может использоваться для изоляции и выпуска всего пневматического давления воздуха из пневматических цилиндров 42a, 42b так, что ручное позиционирование автосцепки 10 по-прежнему может выполняться. Разобщительный кран 70 включает в себя рычаг 72, который может активироваться оператором для открытия разобщительного крана 70. При открытии разобщительного крана 70 текучая среда под давлением выпускается в атмосферу. Следует понимать, что альтернативные типы клапанов могут использоваться для перекрывания и выпуска пневматического давления воздуха из пневматических цилиндров 42a, 42b.
Способ использования устройства автоматического позиционирования автосцепки для сцепления смежных автосцепок описан ниже. Как ранее рассмотрено, с помощью использования устройства 40 автоматического позиционирования автосцепки автосцепка 10 может быть отцентрована в ориентации по центру для сцепления со смежной автосцепкой на прямом участке пути или в смещенной от центра ориентации для сцепления со смежной автосцепкой на криволинейном участке пути. На Фиг. 10 показана автосцепка 10 в ориентации по центру для сцепления со смежной автосцепкой на прямом участке пути, тогда как Фиг. 11 иллюстрирует автосцепку 10 в смещенной от центра ориентации для сцепления на криволинейном участке пути.
Во время использования этого способа контроллер 43 принимает сигнал, относящийся к угловой ориентации тележки относительно корпуса железнодорожного вагона. Угловая ориентация тележки относительно корпуса непосредственно соотносится с кривизной пути, где располагают тележку. Например, на прямом участке пути тележку по существу выравнивают относительно корпуса вагона так, что ось, продолжающаяся через ось тележки, по существу перпендикулярна оси, продолжающейся вдоль продольной длины железнодорожного вагона. Этот вариант выполнения показан на Фиг. 10. Когда железнодорожный вагон располагают на криволинейном пути, таком как показанный на Фиг. 11, тележку поворачивают в направлении пути так, что угол оси, продолжающейся через ось тележки, по существу не перпендикулярен оси, продолжающейся вдоль продольной длины железнодорожного вагона.
Контроллер 43 принимает сигнал от тележки, относящийся к угловому положению тележки, для того, чтобы управлять работой пневматических цилиндров 42a, 42b с возможностью перемещения автосцепки 10 вправо и влево в горизонтальной плоскости. Угловая ориентация автосцепки 10 за счет работы устройства 40 автоматического позиционирования автосцепки зависит от угловой ориентации тележки относительно продольной оси корпуса вагона. В одном варианте выполнения угловая ориентация автосцепки 10 представляет собой то же самое, что и угловая ориентация тележки относительно продольной оси корпуса вагона. В другом варианте выполнения угловая ориентация автосцепки 10 отличается от угловой ориентации тележки относительно продольной оси корпуса вагона.
Так как контроллер 43 независимо управляет работой каждого пневматического цилиндра 42a, 42b, автосцепку могут выравнивать в направлениях влево и вправо в горизонтальной плоскости путем повышения давления в одном цилиндре и понижения давления в другом цилиндре. Это заставляет поршень из цилиндра с повышенным давлением выдвигаться, а поршень из цилиндра с уменьшенным давлением втягиваться. Такая работа пневматических цилиндров 42a, 42b заставляет автосцепку 10 «толкаться» поршнем из цилиндра с повышенным давлением, тогда как поршень из цилиндра с уменьшенным давлением втягивается. Это заставляет автосцепку 10 поворачиваться из состояния по центру, показанного на Фиг. 10, в смещенное от центра состояние, показанное на Фиг. 11. Устройство 40 автоматического позиционирования автосцепки автоматически выравнивает смежные автосцепки до правильной угловой ориентации в пределах сборочного диапазона так, что смежные железнодорожные вагоны могут сцеплять без какой-либо ручной регулировки угловой ориентации автосцепок.
На Фиг. 11, 12А и 12B при приеме контроллером 43 сигнала, относящегося к угловой ориентации тележки, электрический сигнал передают по меньшей мере одному из магнитных клапанов 46a, 46b, 46c, 46d. В одном варианте выполнения магнитные клапаны 46a, 46c всегда ориентируют в открытом положении. Во время использования этого варианта выполнения, если угловую ориентацию автосцепки 10 позиционируют смещенной от центра по направлению к пневматическому цилиндру 42b, и оператор желает перемещать автосцепку 10 обратно в положение по центру, электрический сигнал передают магнитному клапану 46 для перемещения магнитного клапана 46а в закрытое положение. Одновременно электрический сигнал передают магнитному клапану 46b для перемещения магнитного клапана 46b в открытое положение. Воздух под давлением в пневматическом цилиндре 42а тем самым выпускают через выпускное отверстие 54а. Магнитным клапанам 46c и 46d не передают сигнал, удерживающий магнитный клапан 46с в открытом положении и магнитный клапан 46d в закрытом положении. Дополнительную текучую среду под давлением могут подавать к пневматическому цилиндру 42b для толкания автосцепки 10 обратно в положение по центру. С помощью использования этого способа автосцепку 10 перемещают по направлению к пневматическому цилиндру 42а, пневматическому цилиндру с более низким давлением, и в положение по центру. Этот же способ могут использовать, если автосцепку 10 позиционируют смещенной от центра и по направлению к пневматическому цилиндру 42а. В этом случае электрический сигнал одновременно передают магнитному клапану 46 для позиционирования магнитного клапана 46 в закрытом положении и магнитному клапану 46d для позиционирования магнитного клапана 46d в открытом положении, тем самым позволяя воздуху под давлением выпускаться через выпускное отверстие 54. Этот способ также могут использовать, когда автосцепка 10 расположена в положении по центру, и оператор желает изменять положение автосцепки 10 на смещенное от центра положение. Дополнительный способ изменения ориентации автосцепки 10 из смещенного от центра положения в положение по центру заключается в полном повышении давления в обоих пневматических цилиндрах 42а и 42b, которые будут толкать автосцепку 10 в положение по центру. С помощью использования этого способа оба магнитных клапана 46a и 46c устанавливают в открытое положение, а оба магнитных клапана 46b и 46d устанавливают в закрытое положение. В связи с этим всю текучую среду под давлением направляют к пневматическим цилиндрам 42a и 42b, толкающим автосцепку 10 в положение по центру.
Также предполагается, что магнитные клапаны 46a, 46c могут всегда ориентировать в закрытом положении. В этой ситуации для того, чтобы обеспечивать воздух под давлением к пневматическому цилиндру 42a, электрический сигнал передают магнитному клапану 46а для перемещения магнитного клапана 46а в открытое положение. С помощью открытия магнитного клапана 46а воздух под давлением могут направлять к пневматическому цилиндру 42а. Подобным образом, для того, чтобы обеспечивать воздух под давлением к пневматическому цилиндру 42b, электрический сигнал передают магнитному клапану 46с для перемещения магнитного клапана 46с в открытое положение. С помощью открытия магнитного клапана 46с воздух под давлением могут направлять к пневматическому цилиндру 42b.
Когда воздух под давлением подают через магнитные клапаны 46a, 46c, резервуары 48a, 48b также могут заполнять воздухом под давлением. Этот резервуар могут использовать для подачи воздуха под давлением к пневматическим цилиндрам 42a, 42b и могут использовать для удержания дополнительного воздуха под давлением, подлежащего использованию в случае утечки в контроллере 43 или пневматических цилиндрах 42a, 42b. Также предполагается, что резервуары 48a, 48b могут не использовать с контроллером 43. В этом случае воздух под давлением подают непосредственно к пневматическим цилиндрам 42a, 42b без прохождения через резервуар.
Магнитные клапаны 46b, 46d также используют в контроллере 43 для выпуска любого избыточного воздуха под давлением через выпускные отверстия 54a, 54b. Электрический сигнал могут передавать магнитным клапанам 46b, 46d для переключения клапанов между открытым положением и закрытым положением. Когда магнитные клапаны 46b, 46d размещают в закрытом положении, любой воздух под давлением, направляемый через магнитные клапаны 46a, 46c соответственно, направляют полностью к пневматическим цилиндрам 42a, 42b. Однако при размещении магнитных клапанов 46b, 46d в открытом положении воздух под давлением, подаваемый через магнитные клапаны 46a, 46c, направляют по пути наименьшего сопротивления. В некоторых случаях весь воздух под давлением может протекать к пневматическим цилиндрам 42a, 42b. В других случаях, так как резервуары 48 заполнены, воздух под давлением может проходить через магнитные клапаны 46b, 46d и выпускаться в атмосферу через выпускные отверстия 54a, 54b, образованные в корпусе контроллера 43.
Преобразователи 50a, 50b давления могут использовать для передачи электрического сигнала контроллеру 43 для сообщения количества давления, подаваемого к пневматическим цилиндрам 42a, 42b. С помощью подачи этого электрического сигнала к контроллеру 43 каждый пневматический цилиндр 42a, 42b могут независимо регулировать согласно величине давления, которое в настоящий момент подают к каждому пневматическому цилиндру 42a, 42b. Подобным образом, линейные преобразователи 52a, 52b могут использовать для передачи электрического сигнала контроллеру 43 для сообщения линейного расстояния, на которое каждый пневматический цилиндр 42 либо выдвинулся, либо втянулся. Это также помогает при независимом позиционировании каждого пневматического цилиндра 42a, 42b для достижения желаемого смещенного от центра положения или положения по центру. Преобразователи 50a, 50b давления и линейные преобразователи 52a, 52b также могут использовать вместе для подачи информации к контроллеру 43. С помощью использования этой конструкции, если один тип преобразователя выйдет из строя, остальные преобразователи могут по-прежнему использовать для передачи электрического сигнала контроллеру 43 для сообщения положения пневматических цилиндров 42a, 42b.
Несмотря на то, что различные варианты выполнения устройства 40 автоматического позиционирования автосцепки были обеспечены в вышеупомянутом описании, специалист в области техники может выполнять преобразования и изменения этих вариантов выполнения без отклонения от объема и замысла изобретения. Например, следует понимать, что это раскрытие предполагает, что, по мере возможности, один или более признаков любого варианта выполнения могут быть объединены с одним или более признаками любого другого варианта выполнения. Соответственно, вышеупомянутое описание предназначено быть иллюстративным, а не ограничительным. Описанное изобретение определено выше приложенной формулой изобретения, и все изменения изобретения, которые находятся в пределах значения и диапазона эквивалентности формулы изобретения, должны охватываться ее объемом.
Реферат
Заявленная группа изобретений относится к железнодорожному транспорту, в частности к автосцепкам железнодорожных вагонов. Автосцепка для железнодорожного вагона содержит крепление автосцепки, механизм автосцепки и устройство позиционирования автосцепки. Устройство позиционирования автосцепки содержит контроллер, выполненный с возможностью приема сигнальной информации от тележки, и пневматический цилиндр для поворачивания механизма автосцепки. Контроллер управляет работой пневматического цилиндра в ответ на сигнальную информацию, принимаемую от тележки. Способ автоматического позиционирования автосцепки железнодорожного вагона содержит этапы, на которых измеряют угловое положение тележки относительно корпуса железнодорожного вагона, передают сигнальную информацию, относящуюся к угловому положению тележки, контроллеру, регулируют давление, обеспечиваемое для пневматического цилиндра. Достигается автоматизация регулирования положения автосцепки. 3 н. и 17 з.п. ф-лы, 13 ил.
Комментарии