Колесный узел для транспортного средства, направляемого по железнодорожному пути - RU2710467C1
Код документа: RU2710467C1
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение направлено на управляемый колесный узел, как определено формулой изобретения, и на транспортное средство, направляемое по железнодорожному пути, содержащее такой управляемый колесный узел.
УРОВЕНЬ ТЕХНИКИ
Рельсовые транспортные средства, такие как поезда или трамваи, часто обладают колесами, которые оптимально не выравнивают с путями, что приводит к увеличению трения между путем и ободом колеса. Особенно на кривых с малым радиусом этот контакт приводит к увеличенному износу профиля и шумовому загрязнению. В случае транспортных средств с низким уровнем пола этот эффект выражен еще больше: транспортные средства с низким уровнем пола оснащены меньшими колесами и в меньшем их количестве на транспортное средство, чтобы повышать комфорт пассажиров и внутреннее пространство транспортного средства благодаря непрерывной конструкции с низким уровнем пола. Однако это дополнительно приводит к увеличенным нагрузкам на колесо и к более выраженной усталости материала колеса, что вызывает меньшие трещины или даже большие разрушения материала.
Известно несколько решений для уменьшения износа пути и колеса. В 1990-х годах были разработаны системы, которые могли управлять колесами на кривых. Однако оказалось, что эти решения часто страдают от нежелательных побочных эффектов на прямых участках пути, так что колеса односторонне прилипают к ободу на пути, что приводит к усиленному износу и шуму на прямых участках пути. В результате, через несколько лет большинство этих концепций отбросили и снова осуществили традиционные концепции, объединенные с колесными шумопоглотителями и передовыми промышленными смазочными материалами.
Одним из примеров данного объекта изобретения является документ DE 4231346, который касается устройства измерения курса рельса с по меньшей мере одним расположением индуктивного датчика и вычислительным блоком. Схема расположения датчиков для каждого отдельного колеса обнаруживает изменение индуктивности, соответствующее изменению положения рельса. Расположение датчиков может содержать по меньшей мере один датчик перед и один сзади соответствующего колеса и включает в себя магнитный держатель, который закрепляют на телескопическом маятнике, который подвешивают с возможностью вращения. Следовательно, магнитный датчик может перемещаться в горизонтальной плоскости и следовать направлению рельса.
Документ DE 102013001973 относится к концепции высокоскоростных поездов, где направляющая имеет датчики, то есть датчики расстояния для обеспечения измеренных сигналов об эксплуатационном поведении приводного модуля и головной тележки на железной дороге. Датчики располагают внутри фланца колеса и определяют боковое расстояние между фланцем колеса и головкой рельса. Значения расстояний сравнивают со значениями среднего отклонения тележки к середине пути и передают в контроллер. Тяговыми двигателями управляют, чтобы оптимизировать поведение и отводить тележку назад в центральное положение. Датчики конструируют в виде датчиков инерции, передатчиков сигналов или детекторов схода с рельсов.
Документ US 2010294163 A относится к рельсовому транспортному средству, содержащему шасси, снабженные отдельными колесами, которые соответственно устанавливают на несущих мостах таким образом, что они могут поворачиваться в горизонтальном направлении вокруг вертикальной рулевой оси. Рельсовое транспортное средство дополнительно содержит рулевой привод, связанный с каждым колесом, для регулировки заданного угла поворота руля вокруг вертикальной рулевой оси. Кроме того, колеса мостов устанавливают таким образом, что их могут поворачивать в вертикальном направлении вокруг горизонтальной оси развала и на них могут воздействовать посредством привода развала, чтобы регулировать заданный угол развала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Чтобы решить по меньшей мере одну из вышеупомянутых проблем, транспортное средство, направляемое по железнодорожному пути, содержит шасси и по меньшей мере один колесный узел согласно изобретению, взаимно связанный с шасси. Шасси содержат поперечину, имеющую первый и второй конец. Первая ступица взаимно соединена с первым концом поперечины первым рулевым шарниром, вращающимся вокруг первой рулевой оси, расположенной вертикально. На втором конце поперечины вторая ступица взаимно соединена вторым рулевым шарниром, содержащим шарнирный вал и шарнирную втулку. Рулевой шарнир позволяет вращательное движение вокруг второй рулевой оси, расположенной вертикально.
Рулевой шарнир обычно содержит шарнирный вал и шарнирную втулку. Рулевая ось ориентирована концентрически внутри шарнирного вала, вокруг которого колесо является управляемым. Шарнирный вал продолжается через участок поперечины по существу вертикальным образом и проникает в обозначенное углубление ступицы, взаимно соединяя ступицу и поперечину. Предпочтительно, поперечина расположена под осью вращения колеса и шарнирный вал взаимно соединен со ступицей на ее нижней стороне, поскольку низкая поперечина предпочтительна для трамваев с низким уровнем пола.
Первое колесо прикреплено с возможностью вращения к первой ступице вокруг первой оси вращения. Второе колесо прикреплено с возможностью вращения ко второй ступице вокруг второй оси вращения. Каждое из первого и второго колеса содержит поверхность катания, которая во время работы взаимодействует с рельсом железнодорожного пути опорной площадью. Точная форма опорной площади зависит среди прочего от формы поверхности беговой поверхности колеса и рельса и от износа колеса, а также от отдельного поверхностного давления. В предпочтительном варианте центральное расстояние между каждой рулевой осью и центром соответствующей опорной площади находится в пределах максимального расстояния 0,1 м.
Кроме того, первый датчик определяет боковое положение первого датчика (самого) в отношении рельса. Первый датчик прикреплен к первой ступице через оправу первого датчика. Первый датчик предпочтительно расположен в отношении направления движения (направление x) перед опорной площадью первого колеса в горизонтальном направлении, отстоящим на расстоянии A1 в отношении центра соответствующей опорной площади. Может присутствовать средство регулирования датчика, которым датчик можно регулировать в его положении в отношении высоты над рельсом (направление z) и бокового смещения к рельсу (направление y). Таким образом, датчик размещен на высоте в диапазоне около 0,04-0,5 м над рельсом.
Смещение в направлении движения (направление х) закреплено на расстоянии А. Диапазон A1 может быть определен принятием половины диаметра колеса за нижний предел, в то время как верхний предел устанавливают за счет максимального доступного пространства под шасси и перед колесом. Для предпочтительного варианта изобретения этот диапазон составляет между 0,1 и 1,2 м для меньшего колеса трамваев с низким уровнем пола.
Кроме того, привод взаимно соединен с по меньшей мере одним из первого и второго колеса, чтобы вращать по меньшей мере одно взаимно соединенное колесо вокруг соответствующей рулевой оси на угол поворота. Первый датчик взаимно соединен с приводом блоком управления, который вычисляет корректирующий угол поворота руля по меньшей мере для одного взаимно соединенного колеса в зависимости от определенного положения первого датчика.
В варианте изобретения второй датчик прикреплен ко второй ступице оправой второго датчика. По меньшей мере одна оправа датчика предпочтительно выполнена в виде механически жесткой и упругой конструкции, которая препятствует сильным вибрациям или колебаниям датчика в отношении ступицы оправой датчика. Второй датчик предпочтительно расположен в отношении направления движения (направление x) перед опорной площадью второго колеса в горизонтальном направлении, отстоящим на расстоянии A2 в отношении центра соответствующей опорной площади. Диапазон расстояния A2 может быть определен так же, как и диапазон расстояния A1.
В варианте изобретения колесный узел содержит третий датчик, который взаимно соединен с первой ступицей, причем третий датчик взаимно соединен или непосредственно прикреплен к оправе первого датчика на первом колесе. Однако также возможна отделенная оправа датчика первого и третьего датчиков с помощью оправы датчика, которая в свою очередь выполнена в виде упругой конструкции для демпфирования вибраций или колебаний датчика относительно ступицы. Третий датчик предпочтительно расположен в отношении направления движения в задней части опорной площади первого колеса в горизонтальном направлении, отстоящим на расстоянии A3 в отношении центра соответствующей опорной площади.
В варианте настоящего изобретения колесный узел содержит четвертый датчик, который, взаимно соединен со второй ступицей и который расположен в отношении направления движения сзади опорной площади второго колеса в горизонтальном направлении, отстоящим на расстоянии А4 в отношении центра соответствующей опорной площади.
Расстояния от A1 до А4 влияют на чувствительность всей системы. Большие расстояния A1, A2 приводят к более чувствительному поведению всей системы, так как небольшие изменения в положении колеса приводят к более сильному отклонению соответствующего датчика. В то же время возрастает риск того, что датчик не остается над рельсом в случае кривых с особо малым радиусом. Хороших результатов можно добиться, если расстояния от A1 до А4 находятся в диапазоне 0,1-1,2 м. Выбирая расстояние A1 и расстояние A3, соответственно A2 и A4, равными в пределах имеющихся допусков, можно добиться поведения, независимого от направления.
Первая и вторая ступица могут быть непосредственно взаимно соединены друг с другом рулевой тягой. Преимущество заключается в том, что только один привод может быть использован для управления обоими колесами одновременно. Рулевая тяга может иметь переменную длину для регулирования во время работы. Простая, но прочная конструкция может быть достигнута, когда привод прикрепляют к поперечине, и он находится в поперечном направлении (направление y), расположенном между двумя колесами колесного узла.
В предпочтительном варианте выполнения, чтобы удерживать колесо на пути, по меньшей мере один датчик измеряет свое положение в отношении внутреннего направляющего края и/или внутренней боковой стороны рельса. Использование внутреннего края и/или боковой стороны рельса в качестве основного направляющего средства является предпочтительным, поскольку они определяются даже в суровых условиях, например, снег и т.д. Однако в случае рельса, содержащего канавку в качестве направляющего средства для колесных фланцев, канавка как таковая или ее детали могут быть использованы в качестве направляющего средства по меньшей мере для одного датчика. Таким образом, по меньшей мере один датчик определяет свое положение в отношении по меньшей мере одного верхнего края и/или по меньшей мере одной боковой стороны канавки, чтобы ориентировать себя.
Если этого требует условие, то возможно переключение управляющих направляющих средств во время работы и/или объединение сигналов различных датчиков для определения управляющих направляющих средств. Например, возможно использовать различные совокупности датчиков и связанных с ними сигналов, если двигаться по прямому пути или по кривой. Кроме того, можно использовать различные режимы одновременно, например, с относительно длинными транспортными средствами, которые частично находятся на прямом пути, а частично на изогнутой области. На прямом пути может быть достаточно, если - в отношении направления движения транспортного средства - только передние датчики активны, а на кривых как передний, так и задний датчики находятся под контролем. Взаимным соединением нескольких датчиков блоком управления становится даже возможным, что на каждый колесный узел на кривой становятся активными только внутренние или внешние датчики кривых. Интерполяция колес колесного узла становится возможной по длине транспортного средства, а именно в случае сложной ситуации на пути, например, при пересечении стыковых накладок.
По меньшей мере один датчик может быть индуктивным датчиком и/или лазерным датчиком, и/или емкостным датчиком, и/или ультразвуковым датчиком, и/или оптическим датчиком, причем по меньшей мере один датчик расположен бесконтактно с рельсом. Кроме того, в определенных условиях лазерные краевые датчики оказались хорошим средством для точного определения расстояния до края предмета. В общем эти системы основаны на лазерной линии, которую проецируют датчиком, отражают от края и/или поверхности и собирают приемником. Точные расстояния до края и/или поверхности затем вычисляют по этим сигналам с помощью базовых алгоритмов.
Хорошие результаты могут быть достигнуты, если датчик расположен на 0,04-0,5 м над рельсом, чтобы позволять определенный зазор между рельсом и датчиком. По меньшей мере один датчик может быть снабжен средством защиты, которое расположено перед по меньшей мере одним датчиком в отношении направления движения. Средство защиты защищает датчик от повреждений воздействием окружающей среды и/или загрязнения и/или осколков, которые лежат на железной дороге. Чтобы избежать столкновения датчиков с возможными мешающими частями, средства защиты предпочтительно имеют средство очистки, такое как лопата, которая направляет возможные мешающие части от рельса и таким образом от датчиков.
В варианте колесного узла согласно изобретению каждое колесо взаимно соединено с тормозным диском, причем тормозной диск расположен снаружи колеса. Кроме того, приводной двигатель предпочтительно может располагаться снаружи колеса и взаимно соединяться с колесом коробкой передач. Таким образом, ось вращения тормозного диска расположена под углом в отношении оси вращения соответствующего колеса. Однако также возможно располагать тормозной диск внутри колеса, взаимно соединенного с тормозной скобой, прикрепленной к соответствующей ступице.
Блок управления взаимно соединен с по меньшей мере одним датчиком, приводом и блоком рулевого управления. Блок управления получает данные от по меньшей мере одного взаимно соединенного датчика. Он сравнивает данные, полученные от по меньшей мере одного датчика, с заданным параметром. Как только измеренное значение по меньшей мере одного датчика отклоняется на определенное значение от заданного параметра, он активирует привод для противодействующего выворачивания руля. В результате, последующие измеренные значения по меньшей мере одним датчиком, должны быть изменены так, чтобы отклонение от заданного параметра было уменьшено. В случае множества датчиков, возможно множество заданных параметров для каждого датчика. Кроме того, каждый заданный параметр дополнительно могут взаимно соединять с по меньшей мере одним другим заданным параметром и/или он может быть зависимым от множества датчиков.
При необходимости может присутствовать пятый датчик, который взаимно соединен с шасси и с блоком управления. При этом блок управления определяет из измеренных величин пятого датчика тип пути и/или кривизну пути, и/или аномалии пути рельсов перед колесным узлом в направлении движения.
Дополнительно или добавочно блок управления может быть взаимно соединен с системой определения положения, которая обеспечивает информацию о положении колесного узла вдоль рельса, такой как, например, датчик GPS. Пятый датчик передает положение на блок управления, который возвращается к сохраненному набору данных с информацией о рельсах. Таким образом могут извлекать тип пути и/или кривизну пути и/или аномалии пути рельсов перед колесным узлом в направлении движения. Данные о состоянии последующего пути могут использовать для предварительной установки определенных стратегий управления, таких как изменение радиусов кривой или типа пути. Шасси транспортного средства, направляемого по железнодорожному пути, обычно содержит по меньшей мере два колесных узла, как описано выше. Поверхность катания колеса может быть, например, конической или цилиндрической, или бочкообразной. В зависимости от области применения возможен также множественный набор колесных узлов, которые соединяют между собой блоком управления. Соединением датчиков колесных узлов друг с другом, могут добиться очень прочного и самостабилизирующегося поведения.
Альтернативно или дополнительно вместо одного датчика может быть использована группа датчиков вместо одного датчика, например, для увеличения точности. Группу могут структурировать в виде матрицы (n × m), при этом предпочтительно, чтобы столбцы матрицы (m) располагали перпендикулярно, а строки (n) параллельно соответствующему колесу. Во время работы некоторые датчики группы могут быть над рельсом, обнаруживая его положение, в то время как другие датчики могут быть рядом с рельсом. Таким образом, точное положение рельса перед колесом могут определять путем интерполяции информации от множественных датчиков. Система была бы менее сложной, если бы вместо всей матрицы реализовывали только диагональ матрицы с помощью датчиков, чтобы имелась еще информация по ширине (направление, перпендикулярное рельсу) и по амплитуде (направление на одной линии с колесом). Альтернативно, размер матрицы могут уменьшать, если, либо число строк (n), либо число столбцов (m) равно единице. Если количество рядов равно одному, то оставшийся один ряд помещают перед колесом и над (предпочтительно внутренним) краем рельса. На кривой самые дальние от колеса датчики будут первыми, которые потеряют свое положение над рельсом и, следовательно, потеряют информацию о том, где именно расположен рельс. Однако точность будет более высокая при малых радиусах, где датчик расположен дальше от колеса, чем датчики, находящиеся прямо перед колесом. Информацию обо всех датчиках, которые находятся на кривой, по существу над рельсом, могут использовать и интерполировать блоком управления для вычисления соответствующего управляющего сигнала/корректирующего угла поворота руля для привода. В случае только одного столбца датчиков точность зависит от расстояния перед колесом, а также от расстояния между датчиками столбца.
Используя по меньшей мере один колесный узел на шасси транспортного средства, направляемого по железнодорожному пути, как описано выше, могут применять способ управления шасси транспортного средства, направляемого по железнодорожному пути, содержащий следующие этапы, на которых: а) Измеряют смещение по меньшей мере одного датчика в отношении нейтрального положения, где центр по меньшей мере одного датчика находится над внутренним направляющем краем рельса, b) передают измеренное смещение в блок управления, взаимно соединенный с по меньшей мере одним датчиком, c) вычисляют корректирующий угол поворота руля блоком управления, где корректирующий угол поворота руля определяют из измеренного смещения по меньшей мере одного датчика, d) передают вычисленный корректирующий угол поворота руля по меньшей мере одному приводу, взаимно соединенному с по меньшей мере одним колесом и блоком управления, e) вращают по меньшей мере одно взаимно соединенное колесо вокруг соответствующей рулевой оси на корректирующий угол поворота руля по меньшей мере одним приводом, так что по меньшей мере один датчик находится в целевом положении, где фланец по меньшей мере одного взаимно соединенного колеса имеет целевое смещение с внутренним направляющим краем рельса. Может быть выбрано целевое смещение фланца к внутреннему направляющему краю рельса. Диапазон предпочтительно составляет около 0,001-0,06 м. Понятно, что целевое смещение цели не обязательно должно быть фиксированным значением. Поскольку расстояние между рельсами на кривой сильно зависит от радиуса кривой, то оптимальное целевое смещение, подразумевающее, что колесный узел находится в центре между рельсами с одинаковым расстоянием между колесными фланцами и соответствующим рельсом, может также изменяться.
Альтернативно, второй датчик могут соединять с колесным узлом, так что перед первым и вторым колесом, которые взаимно соединяют друг с другом через рулевую тягу, присутствует дополнительный датчик. В этом случае оба датчика имеют отдельное нейтральное положение, в котором смещение измеряют и передают на блок управления. Блок управления предпочтительно вычисляет целевые положения из среднего значения измеренных смещений первого и второго датчиков. Однако могут применять более сложные способы вычисления для определения каждого целевого смещения отдельного датчика. Однако для простого алгоритма предпочтительно, чтобы целевые смещения датчиков к соответствующему внутреннему направляющему краю рельса были одинаковыми.
Как описано выше, в одном варианте третий датчик могут прикреплять за первым колесом, а четвертый датчик могут прикреплять за вторым колесом. Таким образом, каждый датчик измеряет отдельно свое смещение в отношении отдельного нейтрального положения и передает его блоку управления. Затем блок управления может дополнительно использовать измеренные смещения первого и второго датчиков для вычисления первых целевых положений первого и второго датчиков, причем абсолютные значения смещений первого датчика и второго датчика предпочтительно равны. Кроме того, измеренные смещения первого и третьего датчика могут использовать для вычисления вторых целевых положений первого и третьего датчика, причем смещения первого и третьего датчика также предпочтительно равны. Кроме того, измеренные смещения второго и четвертого датчика могут использовать для вычисления третьих целевых положений, причем смещения второго и четвертого датчика предпочтительно равны. Из этой информации блок управления может определять корректирующий угол поворота руля, которым привод управляет первым и вторым колесом в заданном положении, причем в определенном положении первый и второй датчик находятся в одном из первых целевых положений, а первый и третий датчики находятся в одном из вторых целевых положений, а второй и четвертый датчик находятся в одном из третьих целевых положений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Описанное здесь изобретение будет понятно более полно из подробного описания, приведенного здесь ниже, и из сопровождающих чертежей, которые не должны рассматриваться как ограничивающие изобретение, описанное в прилагаемой формуле изобретения. На чертежах:
Фиг. 1 схематично показывает первый вариант управляемого моста согласно настоящему изобретению на виде в перспективе;
Фиг. 2 показывает деталь с Фиг. 1;
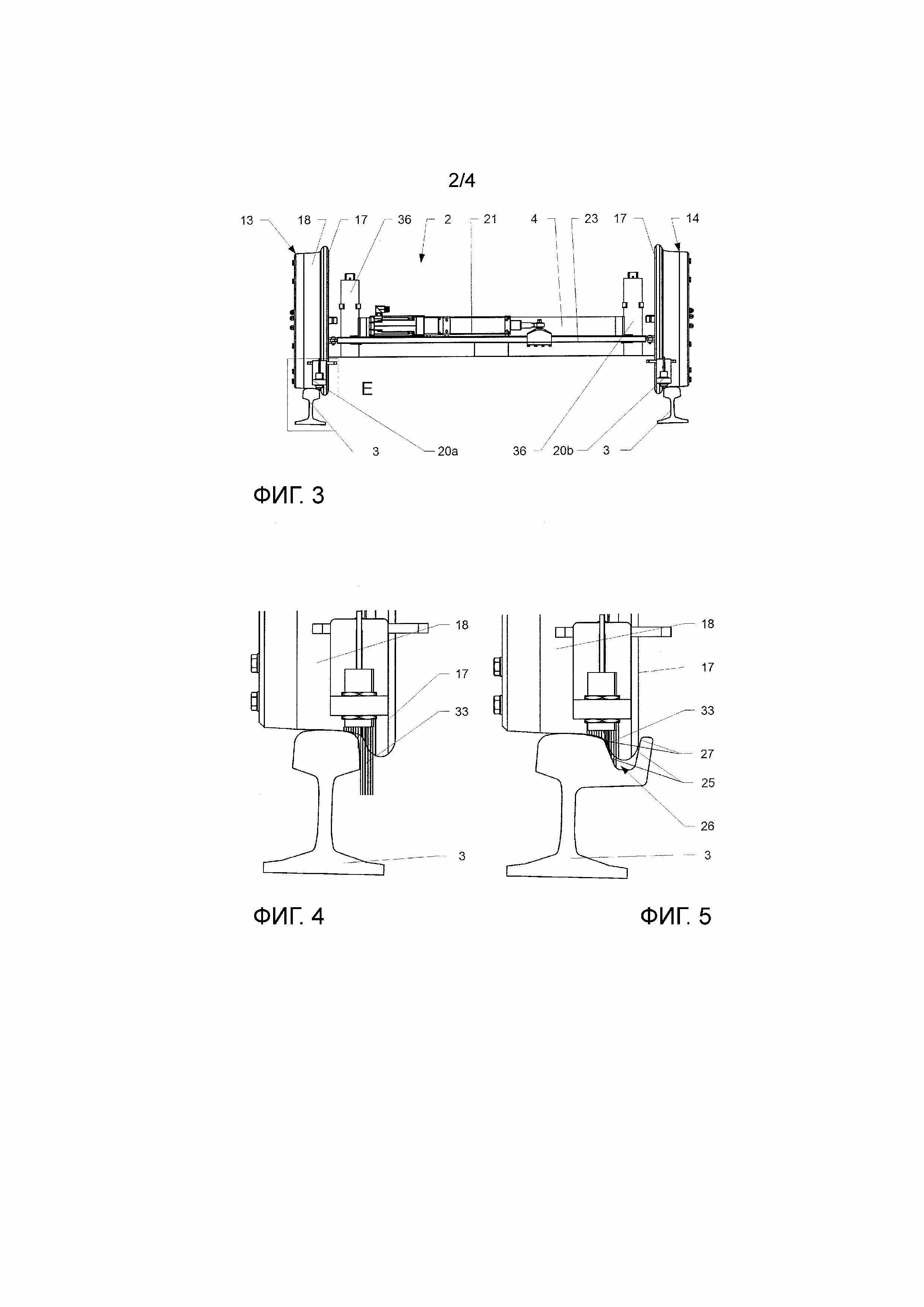
Фиг. 3 схематично показывает первый вариант управляемого моста согласно настоящему изобретению на виде спереди;
Фиг. 4 показывает деталь с Фиг. 3;
Фиг. 5 показывает вариант изобретения, полученного из Фиг. 4
Фиг. 6 показывает сечение управляемого моста с Фиг. 1 и 3;
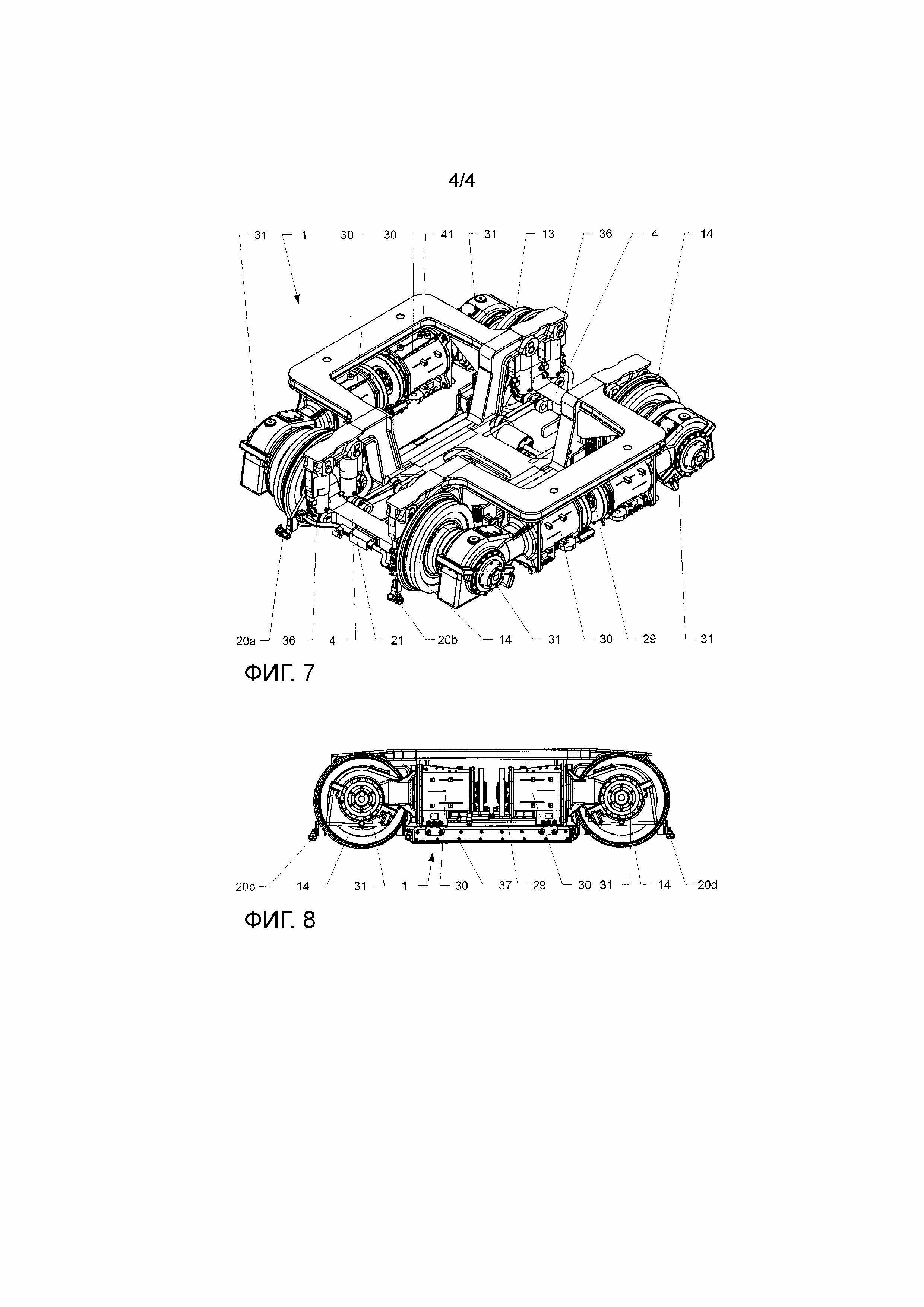
Фиг. 7 схематично показывает второй вариант с шасси, содержащими управляемые мосты согласно настоящему изобретению на виде в перспективе; и
Фиг. 8 схематично показывает шасси с Фиг. 6 на виде сбоку.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Вышеизложенная сущность изобретения, а также последующее подробное описание предпочтительных вариантов изобретения лучше понимают при чтении в сочетании с прилагаемыми чертежами. В целях иллюстрации изобретения вариант выполнения, который предпочитают в настоящее время, в котором одинаковые цифры представляют одинаковые части на нескольких видах чертежей, следует понимать, однако так, что изобретение не ограничивают конкретными раскрытыми способами и средствами.
Фиг. 1 показывает первый вариант колесного узла 2 согласно изобретению. Колесный узел 2 содержит первое и второе колесо 13, 14, каждое из которых имеет колесный фланец 17 и поверхность 18 катания колеса. Каждое колесо 13, 14 вращается вокруг оси 15, 16 вращения и может вращаться вокруг рулевой оси 11, 12. Обе рулевые оси ориентируют над соответствующим рельсом и в районе опорной точки 19 между каждым колесом 13, 14 и соответствующим рельсом 3. Управляемые колеса 13, 14 дополнительно взаимно соединяют с поперечиной 4 и рулевой тягой 23. Через рулевую тягу 23 привод 21 может одновременно управлять обоими колесами 13, 14. Привод 21 крепят к поперечине 4 и размещают между двумя колесами 13, 14. Перед каждым колесом 13, 14 и позади него размещают датчик 20a-d, который прикрепляют к ступице 7, 8 колеса 13, 14 через оправу датчика 34, 35. Следовательно, если колесо 13, 14 имеет определенный угол в отношении рельса 3, датчики 20a-d наклоняют вместе с колесом 13, 14. Датчики 20a-d определяют свое положение в отношении внутреннего направляющего края 24 и/или боковой стороны рельса 3 под ним и, таким образом измеряют угол наклона колеса относительно соответствующего рельса 3. В этом случае датчики 20a-d являются индуктивными датчиками, однако возможны другие средства обнаружения, такие как, например, лазерные и/или оптические датчики.
Фиг. 2 показывает подробный вид (деталь D) расположения датчика 20A с Фиг. 1. Первый датчик 20a взаимно соединяют с оправой 34 первого датчика, которую взаимно соединяют с управляемым колесом 13. Высота и боковое смещение первого датчика 20а в отношении рельса 3 могут быть отрегулированы с помощью средства 43 регулирования датчика.
Фиг. 3 показывает колесный узел 2 на виде спереди, в то время как Фиг. 4 изображает детали Фиг. 3 оправы 34 первого датчика и положение первого датчика 20а. Здесь точное расположение первого датчика 20а в отношении рельса 3 можно увидеть в нейтральном положении. С помощью средства 43 регулирования датчик 20а ориентируют по существу по центру над внутренним направляющим краем рельса 24 на высоте, предпочтительно от 0,04 до 0,5 м. Магнитное поле 33, образующее индуктивный датчик 20а, достигающий рельса 3, иллюстрируют схематически.
Фиг. 5 показывает рельс 3 с канавкой 25, в которую направляют фланец 17 колеса 13, 14. Канавку 25 образуют двумя боковыми сторонами 27 и двумя верхними краями канавки 26. В случае железной дороги с канавкой колесным узлом 2 управляют посредством по меньшей мере одного датчика 20, который измеряет свое положение в отношении канавки 25. При этом датчик может использовать либо верхние края 24 в качестве эталона и/или боковые стороны 27 канавки 25. Переключение соответствующих ссылок и/или объединение сигналов различных датчиков является возможным, если этого требует условие.
Фиг. 6 изображает вид в сечении первого колеса 13, содержащего поверхность 18 катания колеса, а также колесный фланец 17 и спицы 42 колеса, вращающиеся вокруг первой оси 15 вращения. Колесо 13 дополнительно содержит первую ступицу 7, которая не поворачивается вокруг первой оси 15 вращения. Поэтому колесные подшипники 38 размещают на первой ступице 7. Первую ступицу 7 дополнительно соединяют с поперечиной 4 через первый рулевой шарнир 9, который содержит шарнирный вал 39 и шарнирную втулку 40, вокруг которой колесо является управляемым. На это дополнительно указывает первая рулевая ось 11, которая располагают концентрически внутри шарнирного вала 39. Шарнирный вал 39 продолжается через сечение поперечины 4 и проникает в обозначенное углубление первой ступицы 7. На поперечине 4 располагают пружинные узлы 36. Кроме того, можно видеть взаимное соединение оправы 34 первого датчика с первой ступицей 7; в то же время взаимное соединение колеса 13 с рулевой тягой 23 для управления колесом вокруг первой рулевой оси 11 не видно на этом виде в сечении.
Фиг. 7 и 8 иллюстрируют шасси 1, содержащие два колесных узла 2 согласно изобретению. На каждом колесном узле 2 пружинные узлы 36 прикрепляют к поперечине 4, а раму 41 встраивают в пружинные узлы 36 каждого колесного узла 2. На обеих внешних сторонах колесного узла 2 коробки 31 передач располагают и взаимно соединяют с колесами 13, 14. Приводные двигатели 30 взаимно соединяют первый конец с коробками 31 передач таким образом, что приводные двигатели размещают между двумя коробками 31 передач с каждой стороны шасси 1. Следовательно, ось вращения приводных двигателей 30 и ось 15, 16 вращения колес 13, 14 по существу перпендикулярны друг другу, а коробка 31 передач является прямоугольной коробкой передач. Тормозной диск 29 взаимно соединяют со вторым концом каждого приводного двигателя 30, так что два тормозных диска 29 двух колес 13, 14 на одной направляющей 3 находятся в непосредственной близости друг к другу. Электромагнитный тормоз 37 рельса располагают под двумя приводными двигателями 30 на каждой стороне шасси 1 (на каждом рельсе 3) между двумя колесами 13, 14.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - шасси
2 - колесный узел
3 - рельс
4 - поперечина
5 - первый конец (поперечина)
6 - второй конец (поперечина)
7 - первая ступица
8 - вторая ступица
9 - первый рулевой шарнир
10 - второй рулевой шарнир
11 - первая рулевая ось
12 - вторая рулевая ось
13 - первое колесо
14 - второе колесо
15 - первая ось вращения
16 - вторая ось вращения
17 - колесный фланец
18 - поверхность катания
19 - опорная площадь
20 - датчик
21 - привод
22 - блок управления
23 - рулевая тяга
24 - внутренний направляющий край
25 - боковая сторона
26 - канавка
27 - верхний край канавки
28 - средство защиты
29 - тормозной диск
30 - приводной двигатель
31 - коробка передач
32 - тормозная скоба
33 - магнитное поле
34 - оправа первого датчика
35 - оправа второго датчика
36 - пружинный узел
37 - электромагнитный тормоз
38 - колесные подшипники
39 - шарнирный вал
40 - шарнирная втулка
41 - рама
42 - спицы колеса
43 - средство регулирования датчика.
Реферат
Изобретение относится к области железнодорожного транспорта, в частности к тележкам низкопольных трамваев и способам управления колесами таких тележек. Колесный узел тележки содержит поперечину и колеса, шарнирно соединенные с поперечиной. Шарнир имеет возможность вращения вокруг оси поворота колеса. К колесам прикреплены датчики, определяющие продольное положение колеса относительно рельсового пути. Измеренные данные передаются в блок управления, где вычисляется необходимый угол поворота колеса. Достигается снижение износа железнодорожного пути. 2 н. и 25 з.п. ф-лы, 8 ил.
Комментарии