Оросительная система с регулируемой скоростью - RU2615573C2
Код документа: RU2615573C2
Чертежи
Описание
Предпосылки создания изобретения
В течение прошлого века неуклонно повышалась эффективность сельского хозяйства, и эта тенденция должна продолжаться с целью обеспечения производства достаточного количества продовольствия для растущего населения мира. Одним из примечательных достижений в сельскохозяйственном производстве стало внедрение механизированных оросительных систем, таких как центрально-поворотные оросительные системы и линейно перемещающиеся оросительные системы. Эти оросительные системы позволяют орошать целые поля и уменьшать незащищенность урожая от воздействия экстремальных погодных условий. За счет способности контролировать и регулировать количество воды и/или питательных веществ (оросительного состава) на полях в мире увеличилась площадь сельскохозяйственных угодий и повысилась вероятность получения доходных урожаев. Эти оросительные системы обычно содержат устройство управления, обеспечивающее средство взаимодействия с пользователем и позволяющее контролировать и регулировать одну или несколько функций или операций оросительной системы.
Краткое изложение сущности изобретения
Предложена оросительная система, сконфигурированная на поддержание близкого к прямой линии выравнивания (например, под углом по меньшей мере ноль градусов (0°)). В одном из вариантов осуществления оросительная система содержит множество взаимосвязанных пролетов, которые опираются на множество башенных конструкций. Каждая башенная конструкция содержит регулируемый привод для избирательного приведения в действие башенной конструкции с выбранной скоростью. В одном из конкретных вариантов осуществления регулируемые приводы могут содержать двигатели с регулируемым магнитным сопротивлением. Оросительная система также содержит множество датчиков, каждый из которых связан с соответствующим пролетом и определяет выравнивание соответствующего пролета относительно соседних пролетов. Каждый из датчиков поддерживает связь с соответствующим блоком управления регулируемым приводом. Каждый из блоков управления сконфигурирован на регулирование выбранной частоты вращения соответствующего привода с целью сохранения преимущественно линейной взаимной ориентации соседних пролетов из множества взаимосвязанных пролетов вдоль в целом продольно ориентированной оси (например, с целью сохранения взаимного выравнивания пролетов). В одном из конкретных вариантов осуществления блоки управления регулируемым приводом могут поддерживать прямую связь с соответствующим датчиком.
Настоящий раздел "Краткое изложение сущности изобретения" исключительно имеет целью представить объект, который подробно рассмотрен в разделе "Подробное описание" и проиллюстрирован на чертежах. Соответственно он не должен считаться описывающим существенные признаки и не должен использоваться для ограничения объема формулы изобретения.
Краткое описание чертежей
Подробное описание содержит ссылки на сопровождающие его чертежи. Крайняя левая цифра(ы) при обозначении позиции на чертежах соответствует номеру фигуры, на которой впервые представлена такая позиция. В описании и на чертежах сходные или идентичные элементы могут в различных случаях обозначаться одинаковыми позициями.
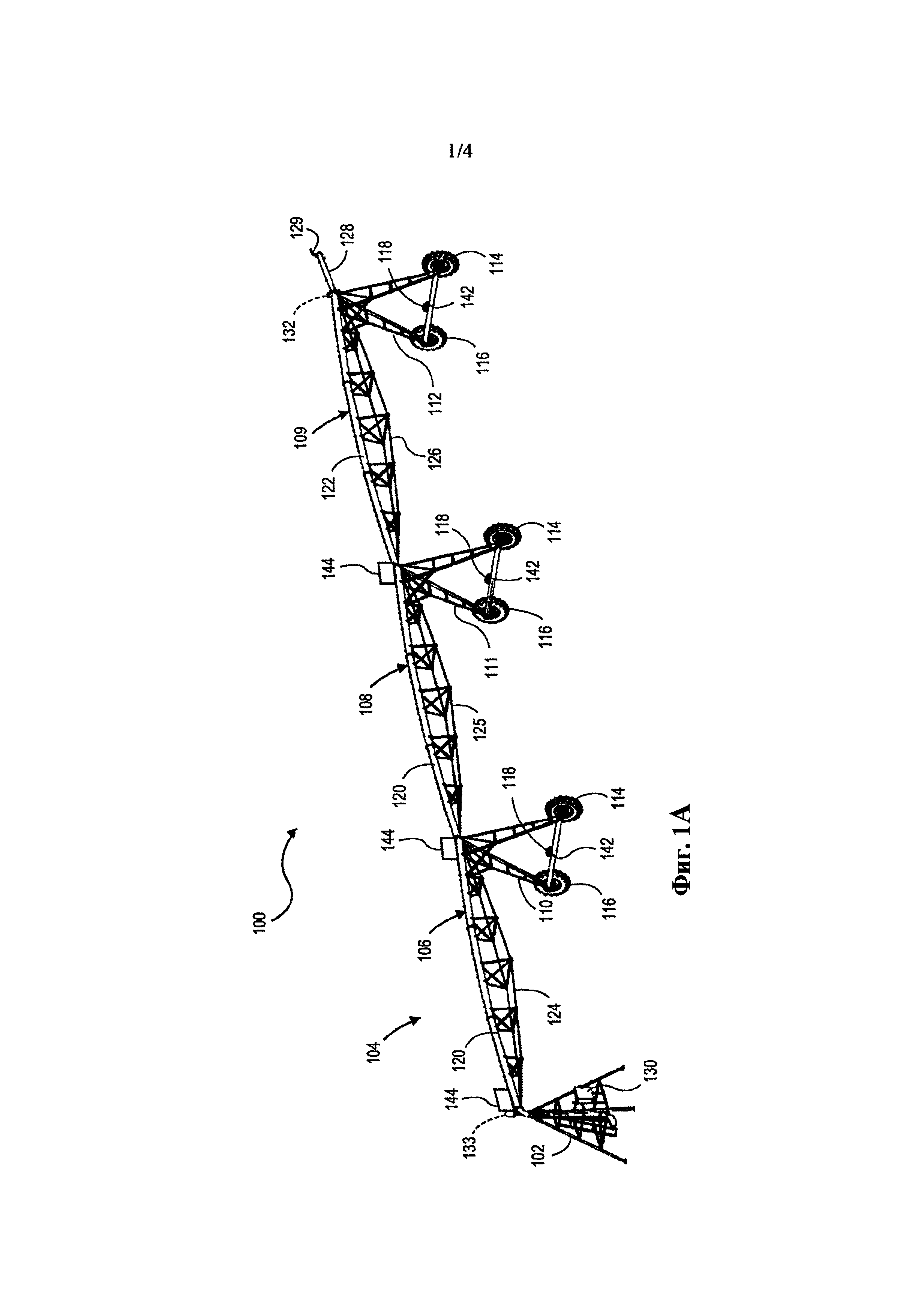
На фиг. 1А схематически показан изометрический вид в перспективе оросительной системы согласно одному из примеров осуществления настоящего изобретения.
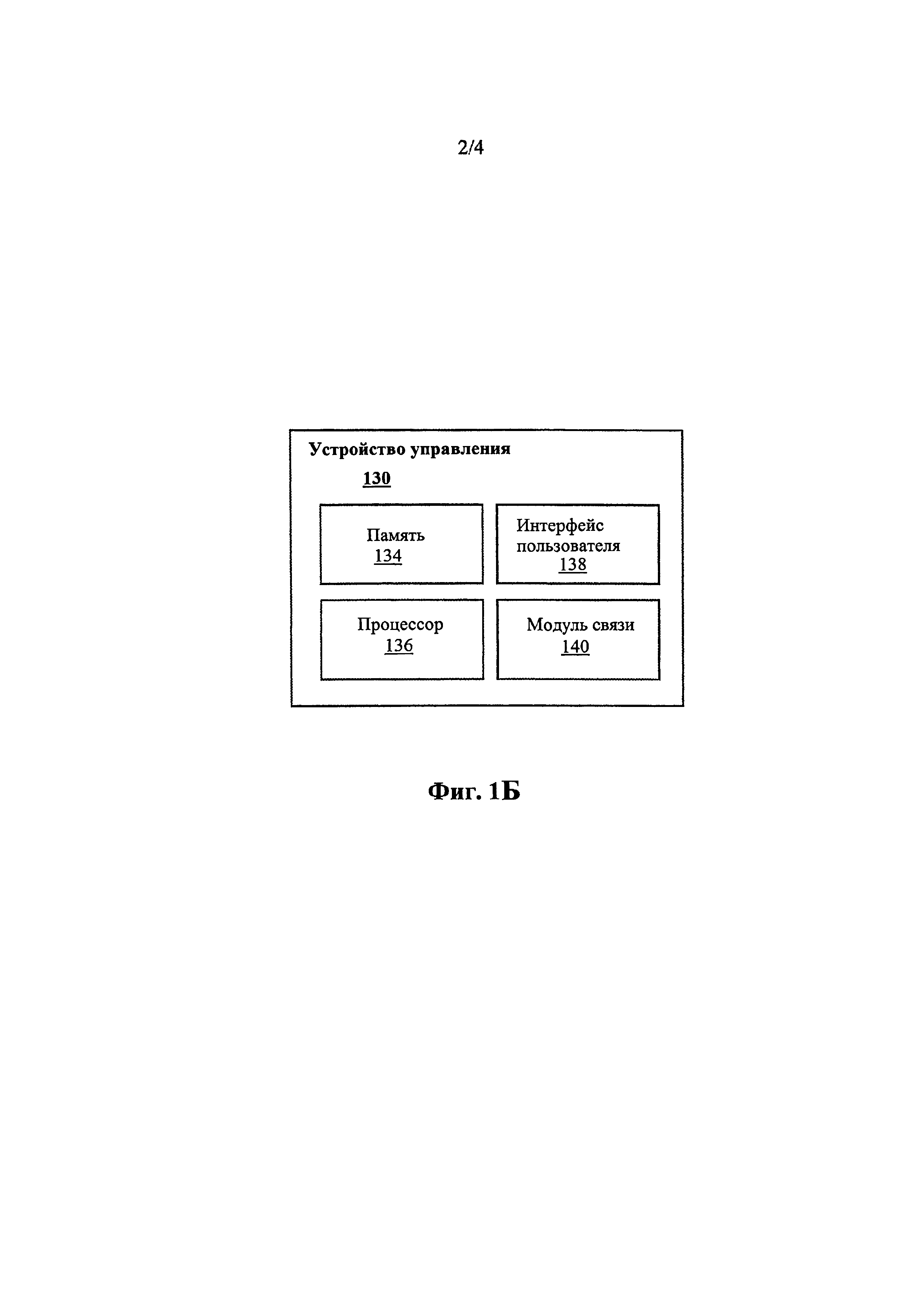
На фиг. 1Б показана блок-схема, иллюстрирующая устройство управления показанной на фиг. 1А оросительной системой согласно одному из примеров осуществления настоящего изобретения.
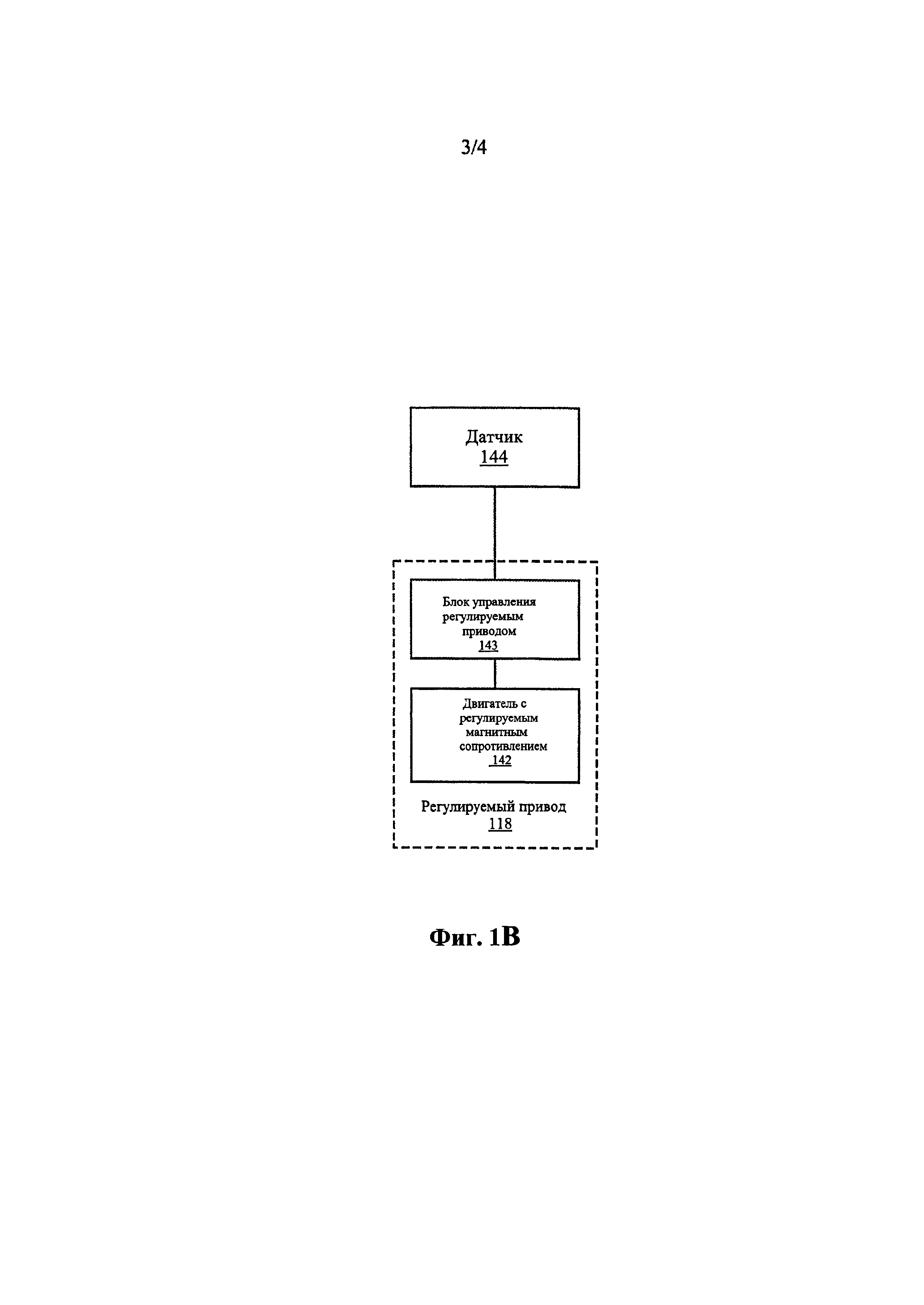
На фиг. 1В показана блок-схема, иллюстрирующая датчик, поддерживающий связь радиоэлектронными средствами с блоком управления регулируемым приводом, который сконфигурирован на регулирование выбранной частоты вращения регулируемого привода в зависимости от определенного датчиком выравнивания соответствующих соседних пролетов.
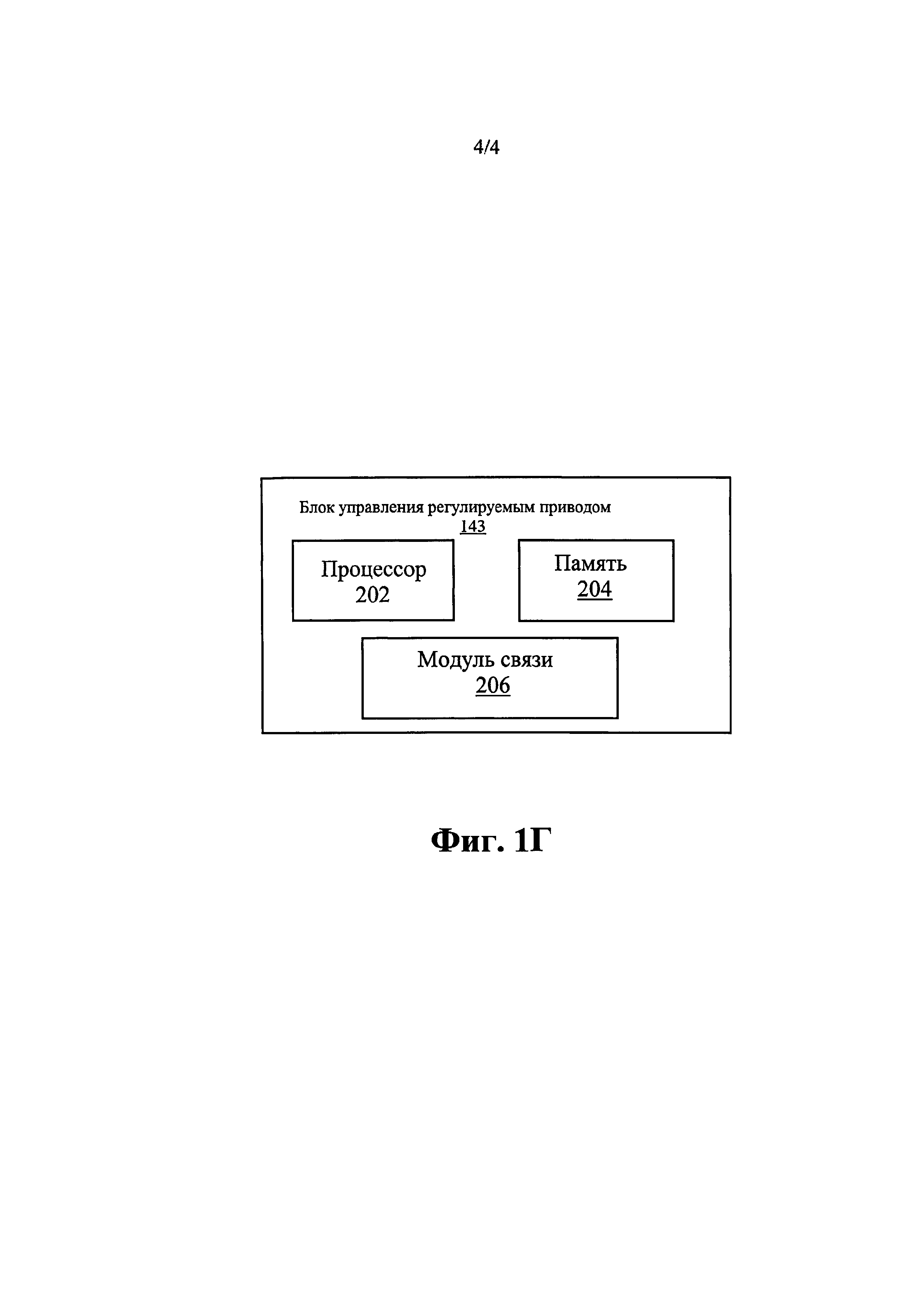
На фиг. 1Г показана блок-схема, иллюстрирующая один из примеров осуществления блока управления регулируемым приводом, который сконфигурирован на управление регулируемым приводом, и содержит процессор, память и модуль связи, сконфигурированный на поддержание связи с датчиком и регулируемым приводом.
Подробное описание
Общее представление
Большинство оросительных систем, таких как центрально-поворотные оросительные системы, содержат приводы (электродвигатели), размещающиеся на приводных башнях для приведения в движение оросительной системы. Во многих из них используются нерегулируемые электродвигатели, что объясняется их относительной простотой и эксплуатационной надежностью. Тем не менее, в таких системах можно корректировать только относительное выравнивание различных участков пролетов путем попеременного запуска и останова приводов. В результате, происходит полная остановка приводных башен, и для их повторного запуска требуется большой импульс мощности. При запуске и останове различные компоненты оросительной системы подвергаются чрезмерному напряжению, что ускоряет износ и увеличивает расходы на обслуживание. Неравномерное движение также способно приводить к неравномерному распределению воды и/или химикатов. Результатом этого является непроизводительный расход воды и химикатов. Неравномерное движение также способно приводить к погрешностям выравнивания или определения положения конца механизма. Результатом этого могут являться обусловленные положением эксплуатационные погрешности.
Соответственно, предложена оросительная система, сконфигурированная на поддержание выравнивания почти по прямой линии (например, под углом по меньшей мере ноль градусов (0°)). В одном из вариантов осуществления оросительная система содержит множество взаимосвязанных пролетов, которые опираются на множество башенных конструкций. Каждая башенная конструкция содержит регулируемый привод для избирательного приведения в движение башенной конструкции с выбранной скоростью. В одном из конкретных вариантов осуществления регулируемые приводы могут содержать двигатели с регулируемым магнитным сопротивлением. Оросительная система также содержит множество датчиков, каждый из которых связан с соответствующим пролетом и определяет выравнивание соответствующего пролета относительно соседних пролетов. Каждый из датчиков поддерживает связь с соответствующим блоком управления регулируемым приводом. Каждый из блоков управления сконфигурирован на регулирование выбранной частоты вращения соответствующего привода с целью поддержания преимущественно линейной взаимной ориентации соседних пролетов из множества взаимосвязанных пролетов вдоль в целом продольно ориентированной оси (например, с целью поддержания взаимного выравнивания пролетов).
Примеры осуществления
На фиг. 1А проиллюстрирована самоходная (например, механизированная) оросительная система (компоновка) 100 согласно одному из примеров осуществления настоящего изобретения. Примеры самоходных оросительных систем включают центрально-поворотную оросительную систему, линейно перемещающуюся оросительную систему и т.п. На фиг. 1А проиллюстрирован один из вариантов осуществления настоящего изобретения, в котором оросительная система 100 представляет собой центрально-поворотную оросительную систему. Тем не менее, предусмотрено, что настоящее изобретение может быть реализовано в других самоходных оросительных системах (например, линейно перемещающихся оросительных системах). Как показано, система содержит центральную поворотную конструкцию 102, с которой связан (например, соединен) главный узел 104 секций (узел оросительных секций). Центрально-поворотная конструкция 102 имеет доступ к колодцу, хранилищу воды (например, емкости с водой) или другому источнику снабжения оросительной системы 100 жидкостью. Например, колодец может находиться под центрально-поворотной конструкцией 102. В другом случае колодец может находиться вблизи возделываемой территории (например, поля). Источник воды может быть связан с хранилищем или другим источником удобрений, пестицидов и/или химикатов, добавляемых в воду с целью получения оросительного состава. Таким образом, составом может являться вода, удобрение, гербицид, пестицид, их сочетания и т.п. Оросительная система 100 может быть связана с устройством подачи жидкости (например, насосной установкой), сконфигурированной на снабжение оросительной системы 100 оросительным составом. Например, устройство подачи жидкости может помогать вытеснять жидкость из источника (например, колодца, запаса воды и т.д.) в описанные далее трубопроводы оросительной системы. Центрально-поворотная конструкция 102 может являться неподвижной или буксируемой с возможностью перемещения оросительной системы 100 с одного поля на другое. В одном из вариантов осуществления центрально-поворотная конструкция 102 может представлять собой каркасную структуру (например, каркасную структуру из оцинкованной стали и т.п.).
Главный узел 104 секций содержит несколько взаимосвязанных пролетов 106, 108, 109 (например, оросительных пролетов), опирающихся на одну или несколько башенных конструкций 110, 111 (промежуточных башенных конструкций) и концевую башенную конструкцию 112. Башенные конструкции 110, 111, 112 могут иметь любую известную из техники башенную конфигурацию, служащую надлежащей опорой для описанных далее трубопроводов (например, секций водопроводных труб). Подразумевается, что узел 104 секций может содержать любое число пролетов и башенных конструкций.
Каждая из башенных конструкций 110, 111 и концевая башенная конструкция 112 имеет колеса 114, 116 для облегчения перемещения оросительной системы 100 (например, позволяющие поворачиваться главному узлу 104 секций) по возделываемой территории (например, полю). В одном из вариантов осуществления колеса 114, 116 могут приводиться в движение соответствующим регулируемым приводом 118 (например, приводным электродвигателем) и т.п.для облегчения перемещения системы 100 по конкретной территории. Например, каждая башенная конструкция 110 может содержать привод 118 для приведения в движение соответствующей башенной конструкции 110, 111, 112 (и оросительной системы 100) по возделываемой территории. В одном или нескольких из вариантов осуществления приводы 118 содержат регулируемые электродвигатели, сконфигурированные избирательно приводить в движение башенную конструкцию с выбранной скоростью. Например, приводы 118 могут содержать двигатели с регулируемым магнитным сопротивлением, сконфигурированные на перемещение оросительной системы 100 в прямом или обратном направлении. Обычно выравнивание каждого пролета 106, 108, 109 (например, выравнивание механизмов) оросительной системы 100 поддерживается соответствующим механическим соединением в месте сочленения пролетов каждого привода. В месте сочленения пролетов приводов размещается потенциометр или другой датчик для ускорения или замедления соответствующего привода118 (двигателя с регулируемым магнитным сопротивлением, подробнее описанного далее) с целью по меньшей мере преимущественного поддержания выравнивания соответствующего пролета 106, 108, 109 относительно другого оросительного пролета. Выравнивание можно определить как выравнивание каждого пролета 106, 108, 109 относительно одного или нескольких соседних пролетов вдоль в целом прямолинейной продольной оси (например, заданной относительно в целом горизонтальной поверхности, такой как поверхность земли).
Как показано на фиг. 1А, каждый пролет 106, 108 содержит трубопроводы 120, 121, 122 (например, трубы), сконфигурированные на перенос (например, транспортировку, подачу и т.п.) жидкости (например, оросительного состава) по длине системы 100 до одного или нескольких узлов рассеивания состава, сконфигурированных на орошение возделываемой территории. Все трубопроводы 120, 121, 122 могут быть связаны друг с другом с целью обеспечения движения жидкости по всем трубопроводам. В одном из вариантов осуществления трубопроводы 120, 121, 122 могут опираться на каркасные конструкции 124, 125, 126 ферменного типа. Так, главное устройство подачи жидкости может быть сконфигурировано на перемещение состава по трубопроводам 120, 121, 122. Как показано на фиг. 1А, оросительная система 100 также содержит консольную стреловидную конструкцию 128, которая отходит наружу от концевой башенной конструкции 112. В одном или нескольких из вариантов осуществления консольная стреловидная конструкция 128 содержит концевой распылитель 129 (например, концевой распылитель 129, установленный на консольной стреловидной конструкции 128). Концевой распылитель 129 может представлять собой применимый напорный распылитель, который может применяться в углах или на других заданных участках поля с целью расширения орошаемой площади.
Как показано на фиг. 1А и 1Б, оросительная система 100 содержит устройство 130 управления (например, пульт управления), которое поддерживает связь радиоэлектронными средствами с одним или несколькими компонентами системы 100. Например, устройство 130 управления может поддерживать связь радиоэлектронными средствами с одним или несколькими блоками, установленными на одной или нескольких башенных конструкциях НО, 111, 112, и датчиком 132 положения для определения приблизительного положения оросительной системы (например, определения приблизительного положения концевой башенной конструкции 112 на возделываемой территории относительно центрально-поворотной конструкции 102). В одном из вариантов осуществления датчиком 132 положения может являться датчик GPS (например, приемник GPS) и т.п., установленный на концевой башенной конструкции 112, для передачи устройству 130 управления сигналов, отображающих положение концевой башенной конструкции 112. Как описано в изобретении, устройство 130 управления сконфигурировано на определение радиального положения главного узла 104 секций относительно центрально-поворотной конструкции 102. В другом варианте осуществления датчиком 132 положения может являться датчик 133 угла поворота, облегчающий определение углового положения главного узла 104 секций. Датчик 133 угла поворота может быть установлен на центрально-поворотной конструкции 102 для облегчения определения углового положения главного узла 104 секций.
В одном из вариантов осуществления устройство 130 управления установлено на центрально-поворотной конструкции 102, управляющей тележке или башенной конструкции 110, 111, 112. Устройство 130 управления в целом размещается на конструктивном элементе оросительной системы 100 там, где в оросительную систему подается состав/вода; тем не менее, в объем настоящего изобретения входят другие известные из техники конфигурации.
Устройство 130 управления сконфигурировано на регулирование условий работы и управление различными функциями оросительной системы 100. В некоторых вариантах осуществления устройство 130 управления активно контролирует функции и работу оросительной системы 100, включая без ограничения положение одной или нескольких секций 120, 121, 122 трубопровода или башенных конструкций 110, 111, 112 (например, положение главного узла 104 секций), включена ли оросительная система 100, напряжение в оросительной системе 100, частоту вращения двигателя оросительной системы 100, приблизительную скорость оросительной системы 100 относительно земли, направление оросительной системы 100, диагностику оросительной системы 100, подается ли состав в оросительную систему 100 (например, работоспособно ли устройство подачи жидкости), включен ли слот останова (SIS), давление состава в оросительной системе 100, время, дату, положение оросительной системы на поле, состояние концевого распылителя и действуют ли надлежащим образом программы (например, программы системы программного обеспечения и т.д.). Устройство 130 управления также управляет функциями и установочными параметрами оросительной системы, включая без ограничения запуск и останов, избирательное энергоснабжение главного устройства подачи жидкости, глубину внесения состава, направление движения оросительной системы 100, избирательное энергоснабжение SIS, автоматическое реверсирование или останов оросительной системы 100, автоматический повторный запуск оросительной системы 100, обеспечение вспомогательного ручного управления системой 100, запись и редактирование программ орошения (например, программ орошения системы программного обеспечения) и управление секторными и последовательными программами (например, программами системы программного обеспечения). В другом варианте осуществления устройство 130 управления может инициировать передачу предупредительного сигнала оператору в случае ошибок в работе оросительной системы 100 или нарушения каких-либо из функций или состояний, контролируемых устройством 130 управления (например, прекращения работы или выхода за приемлемый диапазон).
Устройство 130 управления может размещаться в защищенном от атмосферных влияний корпусе и, как показано на фиг. 1Б, содержит по меньшей мере память 134 для хранения одной или нескольких программ системы программного обеспечения (например, модулей системы программного обеспечения), процессор 136, коммуникативно связанный с памятью 134, интерфейс 138 пользователя (например, графический интерфейс пользователя и т.д.) и модуль 140 связи (например, передатчик, приемник, приемопередатчик и т.д.). Одним из примеров памяти 134 является материальный машиночитаемый носитель, обеспечивающий функциональные возможности хранения различных данных, связанных с работой устройства 130 управления, таких как программы/модули системы программного обеспечения и упомянутые сегменты кодов, или других данных, предписывающих процессору 136 выполнять описанные стадии.
Как описано выше, оросительная система может содержать множество приводов 118, установленных на каждой башенной конструкции 110, 111, 112. Как показано на фиг. 1В, каждый привод 118 может содержать двигатель 142 с регулируемым магнитным сопротивлением (SRM). Двигателем 142 с регулируемым магнитным сопротивлением является электродвигатель, сконфигурированный на работу с использованием крутящего момента магнитного сопротивления. Применение двигателей 142 с регулируемым магнитным сопротивлением обеспечивает непрерывное регулирование частоты вращения (в отличие от электродвигателей без использования регулируемого магнитного сопротивления), что обеспечивает динамическую ("на ходу") корректировку выравнивания пролетов 106, 108, 109. Кроме того, двигатели 142 с регулируемым магнитным сопротивлением обеспечивают постоянное перемещение центрально-поворотных оросительных систем (в отличие от центрально-поворотных оросительных систем, не имеющих двигателей с регулируемым магнитным сопротивлением), что может обеспечивать более равномерное внесение воды и/или химикатов с уменьшением потерь.
Как показано на фиг. 1В, каждый из регулируемых приводов 118 может содержать блок 143 управления регулируемым приводом. Как показано на фиг. 1Г, блок 143 управления регулируемым приводом содержит процессор 202, сконфигурированный обеспечивать функциональные возможности обработки для блока 143 управления регулируемым приводом. Так, процессор 202 может выполнять одну или несколько программ системы программного обеспечения и/или описанных команд. Блок 143 управления регулируемым приводом также содержит память 204, одним из примеров которой является материальный машиночитаемый носитель, обеспечивающий функциональные возможности хранения различных данных, связанных с работой блока 143 управления регулируемым приводом, таких как программы/модули системы программного обеспечения и упомянутые сегменты кодов, или других данных, предписывающих процессору 202 выполнять описанные стадии. В одном из вариантов осуществления блок 143 управления регулируемым приводом непосредственно соединен с соответствующим датчиком 144 (например, посредством проводного соединения). В этом варианте осуществления блок 143 управления регулируемым приводом также непосредственно соединен с соответствующим двигателем 142 с регулируемым магнитным сопротивлением (например, посредством проводного соединения). В другом варианте осуществления блок 143 управления регулируемым приводом может содержать модуль 206 связи, который сконфигурирован на поддержание связи с другими компонентами (например, двигателями 142 с регулируемым магнитным сопротивлением, датчиками 144) по сети связи (например, сети беспроводной связи, сети проводной связи и т.д.). Например, модуль 206 связи может быть непосредственно связан (например, одним или несколькими проводами и т.п.) с соответствующим регулируемым приводом 118, а также с соответствующим датчиком 144. Модулем 206 связи могут являться разнообразные средства и выполняемые функции связи, включая без ограничения одну или несколько антенн, передатчик и/или приемник, приемопередатчик и т.п. Хотя на фиг. 1Г показано, что блок 143 управления регулируемым приводом встроен (например, помещается) в регулируемый привод 118, подразумевается, что блок 143 управления регулируемым приводом может являться автономным блоком.
Как показано на фиг. 1В, каждый из датчиков 144 поддерживает связь с соответствующим блоком 143 управления регулируемым приводом. В одном из конкретных вариантов осуществления датчики поддерживают прямую связь радиоэлектронными средствами с соответствующим блоком 143 управления регулируемым приводом. Ранее в оросительных системах могли применяться переключатели рычажного типа. Эти переключатели могут быть заменены датчиками 144, сконфигурированными на контроль (например, определение) взаимного выравнивания пролетов оросительной системы 100. Например, датчики 144 сконфигурированы на определение угла между соответствующими пролетами. В одном или нескольких из вариантов осуществления датчиками 144 могут являться потенциометры, емкостные датчики выравнивания, лазерные датчики выравнивания, бесконтактные датчики приближения или другие устройства, способные выполнять выражаемое количественно измерение выравнивания пролетов (например, определять величину угла между соответствующими пролетами), а не просто определять, что отклонение соответствующего пролета 106, 108, 109 от выравнивания выходит за заданное максимальное значение. Как описано выше, датчики 144 (потенциометры, емкостные датчики выравнивания, лазерные датчики выравнивания и/или бесконтактные датчики приближения) поддерживают связь радиоэлектронными средствами с блоком 143 управления регулируемым приводом. В ответ блок 143 управления регулируемым приводом сконфигурирован на доставку (например, обеспечение, генерирование, передачу) одного или нескольких сигналов управления двигателем 142 с регулируемым магнитным сопротивлением. Например, процессор 202 блока 143 управления регулируемым приводом сконфигурирован на преобразование получаемых от датчика 144 данных угла в данные частоты вращения, используемые для управления двигателем 142 с регулируемым магнитным сопротивлением (например, регулировании скорости соответствующего пролета 106, 108, 109). Так, блок 143 управления регулируемым приводом может подавать один или несколько управляющих сигналов, которые побуждают заданный привод 118 (например, двигатель 142 с регулируемым магнитным сопротивлением) изменять частоту вращения (например, повышать, снижать), что приводит к изменению скорости соответствующего пролета 106, 108, 109. В одном из вариантов осуществления устройство 130 управления может быть сконфигурировано на поддержание связи с каждым блоком управления регулируемым приводом во время работы оросительной системы 100. Например, блок 143 управления регулируемым приводом может быть сконфигурирован на предоставление устройству 130 управления данных диагностики и/или технических данных регулируемого привода 118.
В одном из вариантов осуществления датчик 144 сконфигурирован на непрерывный контроль (определение) показателей выравнивания (например, углов) соответствующих пролетов 106, 108, 109. В свою очередь, блок 143 управления регулируемым приводом сконфигурирован на передачу управляющего сигнала, побуждающего привод 118 непрерывно изменять частоту вращения (например, изменять частоту вращения двигателя 142 с регулируемым магнитным сопротивлением) с целью восстановления выравнивания пролета 106, 108, 109 с неправильным выравниванием. Так, блок 143 управления регулируемым приводом сконфигурирован на непрерывную передачу сигналов на основании сигнала датчика 144, чтобы обеспечивать по меньшей мере преимущественно близкое в идеальному (например, близкое к горизонтальному) выравнивание соответствующих пролетов посредством электродвигателей 142 с регулируемым магнитным сопротивлением. Например, частота вращения привода 118 может изменяться (посредством одного или нескольких управляющих сигналов) в зависимости от отклонения от нуля градусов (выравнивания пролетов с отклонением 0°). В одном или нескольких из вариантов осуществления в оросительной системе 100 (например, датчиках 144, блоке 143 управления регулируемым приводом и т.д.) может применяться один или несколько методов управления двигателями с целью регулирования частоты вращения приводов 118 и/или измерения выравнивания конкретного пролета. Например, в оросительной системе 100 может применяться алгоритм пропорционально-интегрально-дифференциального регулирования и т.п. с целью тонкой регулировки частоты вращения конкретного привода 118. Блок 143 управления регулируемым приводом сконфигурирован на непрерывную передачу приводам 118 одного или нескольких управляющих сигналов, когда датчик 144 определяет, что конкретный пролет неправильно выровнен.
Так, в процессе работы конкретному приводу 118 передаются управляющие сигналы, сконфигурированные на регулирование частоты вращения конкретного привода 118, и происходит регулирование частоты вращения привода. Как описано выше, управляющие сигналы могут быть основаны на сигналах потенциометров, емкостных датчиков выравнивания, лазерных датчиков выравнивания, бесконтактных датчиков приближения и/или других параметрах, применимых для определения новой частоты вращения, установленной для конкретного привода. Как описано выше, блок 143 управления регулируемым приводом содержит процессор 202, который сконфигурирован на прием и использование данных (информации) башенных конструкций 110, 111, 112 при определении частоты вращения, установленной для конкретного привода 118. В одном из вариантов осуществления процессор 202 может представлять собой микропроцессор, который содержит специализированную логическую схему (например, компоновку схем) управления регулируемым приводом 118 и/или двигателями 142 с регулируемым магнитным сопротивлением. Например, блок 143 управления регулируемым приводом может поддерживать связь с каждой из башенных конструкций 110, 111, 112 посредством датчиков 144 и т.п. Как описано выше, тем самым может обеспечиваться более тонкая регулировка скорости и динамическая коррекция выравнивания оросительной системы 100.
Вывод
Хотя объект изобретения описан применительно к конкретным конструктивным признакам и/или стадиям процесса, подразумевается, что объект, охарактеризованный в прилагаемой формуле изобретения, необязательно ограничен описанными выше конкретными признаками или действиями. Более того, описанные выше конкретные признаки или действия раскрыты в качестве примеров форм реализации притязаний.
Реферат
Группа изобретений относится к области оросительных систем. Оросительная система содержит множество взаимосвязанных пролетов. Пролеты опираются на множество башенных конструкций. Каждая башенная конструкция содержит регулируемый привод для избирательного приведения в движение башенной конструкции с выбранной скоростью. Регулируемые приводы содержат двигатели с регулируемым магнитным сопротивлением. Оросительная система содержит множество датчиков. Каждый из датчиков связан с соответствующим пролетом и определяет выравнивание соответствующего пролета относительно соседних пролетов. Каждый из датчиков поддерживает связь с соответствующим блоком управления регулируемым приводом. Каждый из блоков управления сконфигурирован на регулирование выбранной частоты вращения соответствующего привода. Обеспечивается сохранение линейной взаимной ориентации соседних пролетов вдоль в целом продольно ориентированной оси. 3 н. и 11 з.п. ф-лы, 4 ил.
Комментарии