Самоходная концевая станция - RU200827U1
Код документа: RU200827U1
Чертежи




Описание
Полезная модель относится к области подъемно-транспортного машиностроения, а именно к устройствам на основе подвесных канатных систем для мобильного развертывания транспортно-перегрузочных грузовых и пассажирских дорог в условиях необорудованной и труднодоступной местности, при ликвидации природных или техногенных чрезвычайных ситуаций.
Известна конструкция тыловой мачты для мобильной канатной трелевочной установки (патент RU №84181, A01G 23/02, 2009 г.) [1], размещенной с возможностью ее бокового расположения на самоходной базе, имеющей шасси с установленным на нем приводящимся во вращение вручную поворотным кругом, причем мачта снабжена соединенными с помощью шарнира вертикальной и наклонной стойками, из которых наклонная стойка прикреплена посредством цапфы к поворотному кругу, а вертикальная стойка удерживается канатом, одним концом навитым на барабан, а другим запасованным в блоки на вертикальной стойке для подъема-опускания мачты при ее переводе в транспортное положение при перебазировании мобильной канатной трелевочной установки на новое место дислокации.
Эта конструкции имеет ряд существенных конструктивных и функциональных недостатков. Во-первых, в рабочем положении тыловая мачта непосредственно не размещается на самоходном шасси, что не позволяет использовать аутригеры и анкерные устройства для обеспечения устойчивости против ее опрокидывания под эксплуатационной нагрузкой. Во-вторых, работы по монтажу/демонтажу тыловой мачты не механизированы, выполняются вручную. В-третьих, что является наиболее важным для предлагаемой полезной модели, конструкция тыловой мачты не позволяет обеспечить движение несуще-тягового каната вместе с транспортируемым грузом, так как мачта обеспечивает лишь натяжение неподвижного несущего каната для перемещения по нему кареток-захватов со срубленными деревьями вследствие отсутствия вращающегося от приводного механизма канатного шкива.
Наиболее близким по своей технической сущности к предлагаемой полезной модели и принятой за ее прототип является подвесная канатная дорога (патент RU №2247671, В61В 7/00, 2005 г.) [2], содержащая приводной канатный шкив, кинематически соединенный с движителем расположенной горизонтально на вертикально установленных гидравлических аутригерах основной самоходной транспортной установки, и снабжена также дополнительной самоходной транспортной установкой, заякоренной натяжным устройством вдоль оси канатной дороги и расположенной навстречу основной самоходной транспортной установке так, что продольные оси установок располагаются вдоль продольной оси канатной дороги, а также замкнутый натянутый несуще-тяговый канат с прицепными устройствами, огибающий шкивы и опирающийся на тяговые установки, располагающиеся на телескопических опорах, расположенных вдоль оси канатной дороги.
Существенным недостатком рассмотренного прототипа является то, что расположенные на самоходных транспортных установках приводные канатные шкивы смонтированы стационарно в горизонтальной плоскости, что требует при разности высот расположения на местности в концевых точках трассы канатной дороги самоходных транспортных установок применения промежуточных телескопических опор не только для поддержания несуще-тягового каната по длине трассы, но и для сопряжения концевых участков канатной дороги с горизонтальной ориентацией указанного каната с наклонным участком канатной дороги. Наличие таких концевых участков со строго горизонтальной ориентацией несуще-тягового каната является обязательным условием качественной работы рассматриваемой мобильной канатной дороги, так как согласно известным экспериментальным данным (например, [3]) даже незначительные отклонения продольной оси грузонесущего каната из плоскости канатного шкива приводят к повышенному износу профилированного ручья шкива и самого каната. Согласно [3] отклонение оси ручья шкива от оси каната не должно превышать 1 град во избежание интенсивного износа как профилированного ручья шкива, так и самого несуще-тягового каната. Интенсивный износ ведет к снижению ресурса работы элементов канатной системы мобильной канатной дороги и безопасности ее эксплуатации.
Технической задачей, на решение которой направлена предлагаемая полезная модель, является обеспечение возможности установки и регулирования пространственного положения концевой опоры самоходной концевой станции, предназначенной для применения с другим аналогичным шасси в составе мобильного транспортно-перегрузочного канатного комплекса, с целью согласования взаимного расположения канатных шкивов и несуще-тягового каната в одной плоскости независимо от перепада высот в местах установки самоходных концевых станций и от взаимного расположения самоходных концевых станций по отношению друг к другу, а также автоматизация действий обслуживающего персонала по переводу концевой опоры из рабочего положения в транспортное и обратно. Это также повышает долговечность дорогостоящего элемента - канатной системы - в процессе эксплуатации и снижает продолжительность вспомогательных технологических операций при развертывании/демонтаже мобильной канатной дороги.
Для решения указанной технической задачи в самоходной концевой станции, в виде оборудованного аутригерами и анкерами мобильного шасси, предназначенной для применения с другим аналогичным шасси в составе мобильного транспортно-перегрузочного канатного комплекса, содержащей приводной и натяжной механизмы, закрепленную на ее несущей раме концевую опору с расположенным на ней канатным шкивом и огибающий канатный шкив замкнутый натянутый несуще-тяговый канат с прицепными устройствами для подвески транспортируемых грузов, концевая опора своим нижним концом шарнирно крепится к несущей раме самоходной концевой станции и имеет возможность перемещения в вертикальной плоскости, совпадающей с продольной осью мобильного шасси, на произвольный угол не более 120 градусов с помощью подъемного гидроцилиндра, а шарнирно закрепленный на оголовке концевой опоры канатный шкив снабжен механизмом поворота на угол не более 90 градусов с помощью поворотного гидроцилиндра.
Полезная модель поясняется более подробно с помощью чертежей. Все не требующиеся для непосредственного понимания полезной модели элементы исключены.
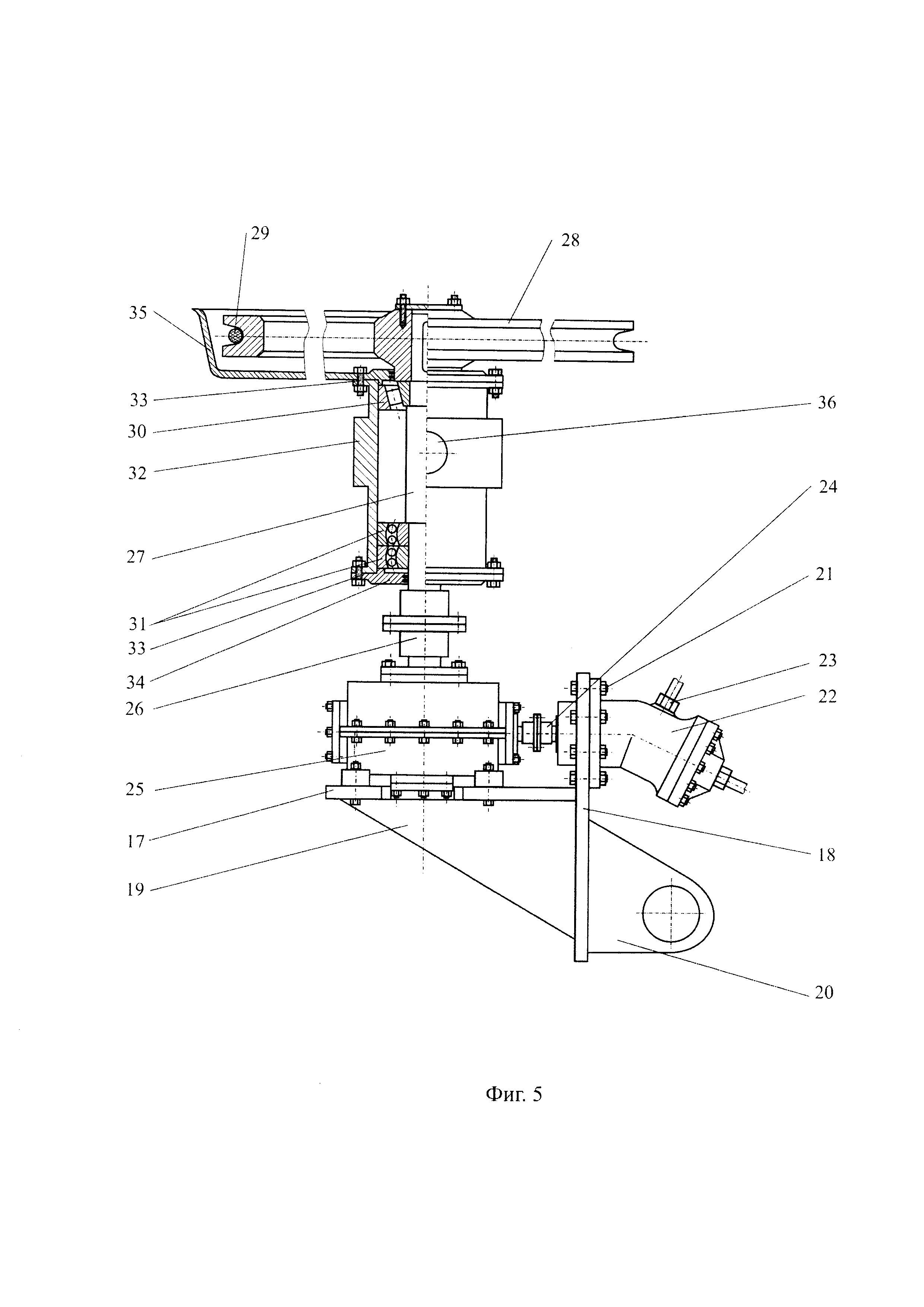
На фиг. 1 показан общий вид самоходной концевой станции с концевой опорой в транспортном (нерабочем) положении; на фиг. 2 - общий вид самоходной концевой станции с концевой опорой в рабочем положении; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - конструкция узла крепления и механизма поворота канатного шкива (элемент I на фиг. 2, вид сбоку); на фиг. 6 - вид А на фиг. 2; на фиг. 7 - общий вид самоходной концевой станции с телескопической концевой опорой в рабочем положении.
Суть полезной модели заключается в следующем.
На платформе 1 (фиг. 1, 2, 7), установленной на несущей раме 2 (фиг. 1, 2, 4, 7) самоходной концевой станции 3 (фиг. 1, 2, 7), своим нижним концом закреплена концевая опора 4 (фиг. 1-3, 6). Узел ее крепления представляет собой цилиндрический шарнир, образованный парой проушин 5 (фиг. 1, 2, 7), неподвижно закрепленных, например, сваркой на платформе 1, и парой проушин 6 (фиг. 1, 2, 7), неподвижно закрепленных на нижнем конце концевой опоры 4 (фиг. 1-3, 6), в соосные отверстия которых вставлен шарнирный палец 7 (фиг. 1, 2, 7). Данная конструкция узла крепления концевой опоры 4 (фиг. 1-3, 6) позволяет ей совершать поворотное движение в вертикальной плоскости, совпадающей с продольной осью мобильного шасси, на угол а не более 120 градусов. К нижней части концевой опоры 4 (фиг. 1-3, 6) с помощью цилиндрического шарнира (фиг. 3) крепится шток 8 (фиг. 1-3, 7) подъемного гидроцилиндра 9 (фиг. 1, 2, 4). Указанный цилиндрический шарнир образован парой профилированных проушин 10 (фиг. 1-3, 7), неподвижно закрепленных на боковых сторонах концевой опоры 4 (фиг. 1-3, 6), в соосные отверстия которых вставлен шарнирный палец 11 (фиг. 1-3, 7) с надетой на него крепежной втулкой 12 (фиг. 3) штока 8 (фиг. 1-3, 7) подъемного гидроцилиндра 9 (фиг. 1, 2, 4). Корпус подъемного гидроцилиндра 9 (фиг. 1, 2, 4) с помощью цилиндрического шарнира (фиг. 4) крепится к несущей раме 2 (фиг. 1, 2, 4, 7). Указанный цилиндрический шарнир образован парой профилированных проушин 13 (фиг. 1, 2, 4, 7), неподвижно закрепленных, например, с помощью сварки на несущей раме 2 (фиг. 1, 2, 4, 7), в соосные отверстия которых вставлен шарнирный палец 14 (фиг. 1, 2, 4, 7) с надетой на него серьгой торцевой крышки 15 (фиг. 4) подъемного гидроцилиндра 9 (фиг. 1, 2, 4). К оголовку концевой опоры 4 (фиг. 1-3, 6) крепится механизм поворота канатного шкива (элемент I на фиг. 2). Конструктивные элементы механизма поворота канатного шкива закреплены на раме 16 (фиг. 1, 2, 7), которая состоит из горизонтальной пластины 17 (фиг. 5, 6), вертикальной пластины 18 (фиг. 5, 6), двух параллельно расположенных ребер жесткости 19 (фиг. 5, 6) и двух параллельно расположенных профилированных проушин 20 (фиг. 5, 6). На вертикальной пластине 18 (фиг. 5, 6) закреплен с помощью болтов 21 (фиг. 5, 6) гидромотор 22 (фиг. 5, 6). В настоящее время в качестве гидромоторов для мобильных транспортно-технологических машин наиболее широко используются гидромоторы (или обратимые гидромашины - насосмоторы) аксиально-поршневого или радиально-поршневого типа [4]. К гидромотору 22 (фиг. 5, 6) через штуцеры 23 (фиг. 5, 6) по напорным трубопроводам подается рабочая жидкость от гидравлического насоса (трубопроводы и насос условно не показаны). Выходной вал гидромотора 22 (фиг. 5, 6) с помощью муфты 24 (фиг. 5) кинематически связан с быстроходным (входным) валом червячного редуктора 25 (фиг. 5, 6), который закреплен на горизонтальной пластине 17 (фиг. 5, 6) рамы 16 (фиг. 1, 2, 7). Тихоходный (выходной) вал червячного редуктора 25 (фиг. 5, 6) с помощью муфты 26 (фиг. 5, 6) кинематически связан с приводным валом 27 (фиг. 5, 6), на конце которого с помощью разъемного соединения, например, шпоночного или шлицевого соединения закреплен канатный шкив 28 (фиг. 1, 2, 5-7). В профилированном ручье канатного шкива 28 (фиг. 1, 2, 5-7) располагается несуще-тяговый канат 29 (фиг. 2, 5-7), который огибает канатный шкив 28 (фиг. 1, 2, 5-7). Приводной вал 27 (фиг. 5, 6) с помощью подшипников качения - упорного роликоподшипника 30 (фиг. 5, 6) и сферических радиальных шарикоподшипников 31 (фиг. 5, 6) закреплен в корпусе механизма поворота канатного шкива, образованном стаканом 32 (фиг. 5, 6) и закрепленными на нем с помощью болтов 33 (фиг. 5, 6) торцевой крышкой 34 (фиг. 5, 6) и предохранительным кожухом 35 (фиг. 1, 2, 5-7). Стакан 32 (фиг. 5, 6) имеет утолщенную центральную часть для неподвижного крепления полуосей 36 (фиг. 5, 6), например, с помощью кольцевого сварного шва. Полуоси 36 (фиг. 5, 6) установлены в соосные отверстия двух параллельно расположенных профилированных проушин 37 (фиг. 1, 2, 6, 7), неподвижно закрепленных, например, с помощью сварки на боковых стенках концевой опоры 4 (фиг. 1-3, 6). В соосные отверстия двух параллельно расположенных профилированных проушин 20 (фиг. 5, 6) вставлен шарнирный палец 38 (фиг. 1, 2, 6, 7) с надетой на него крепежной втулкой 39 (фиг. 6) штока 40 (фиг. 1, 2, 6, 7) поворотного гидроцилиндра 41 (фиг. 1, 2, 7). Другим концом поворотный гидроцилиндр 41 (фиг. 1, 2, 7) крепится к концевой опоре 4 (фиг. 1-3, 6) с помощью цилиндрического шарнира. Указанный шарнир образован парой профилированных проушин 42 (фиг. 1, 2, 7), в соосные отверстии которых вставлен шарнирный палец 43 (фиг. 1, 2, 7) с надетой на него серьгой торцевой крышки поворотного гидроцилиндра 41 (фиг. 1, 2, 7) (конструкция шарнира аналогична показанной на фиг. 4). В подшипники качения, использующиеся в конструкции перечисленных цилиндрических шарниров, а также в подшипники 30 (фиг. 5, 6) и 31 (фиг. 5, 6) набита консистентная пластичная смазка, аналогичная рекомендуемой для использования в узлах трения мобильных транспортно-технологических машин [4].
Полезная модель работает следующим образом.
К месту назначения самоходная концевая станция 3 (фиг. 1, 2, 7) выдвигается, имея концевую опору 4 (фиг. 1-3, 6) в транспортном положении (как показано на фиг. 1). С целью недопущения поломок металлоконструкции концевой опоры 4 (фиг. 1-3, 6) вследствие движения по неровной поверхности, в транспортном положении концевая опора 4 (фиг. 1-3, 6) опирается и закрепляется на транспортной стойке 44 (фиг. 1, 2, 7). При достижении места назначения самоходная концевая станция 3 (фиг. 1, 2, 7) ориентируется таким образом, чтобы продольная ось мобильного шасси совпадала с продольной осью канатной дороги. Для обеспечения общей устойчивости в условиях действия значительных горизонтальных опрокидывающих нагрузок от силы натяжения несуще-тягового каната и транспортируемого груза самоходная концевая станция 3 (фиг. 1, 2, 7) выставляется на аутригеры (выносные опоры), которые закрепляются в грунте с помощью дополнительных анкерных устройств (условно не показаны, так как в их качестве могут быть использованы известные конструкции аутригеров с анкерными устройствами [5]). Установка концевой опоры 4 (фиг. 1-3, 6) производится в два этапа в связи с необходимостью согласования взаимного расположения канатных шкивов 28 (фиг. 1, 2, 5-7) сопрягаемых самоходных концевых станций 3 (фиг. 1, 2, 7) при их объединении в единую канатную транспортную систему с помощью общего несуще-тягового каната 29 (фиг. 2, 5-7). На первом этапе установки, который носит предварительных характер, закольцованный несуще-тяговый канат 29 (фиг. 2, 5-7) размещается в ручье канатного шкива 28 (фиг. 1, 2, 5-7). При этом предохранительный кожух 35 (фиг. 1, 2, 5-7) обеспечивает надежную фиксацию несуще-тягового каната 29 (фиг. 2, 5-7), исключая возможность его соскакивания с канатного шкива 28 (фиг. 1, 2, 5-7) в процессе дальнейшего перемещения концевой опоры 4 (фиг. 1-3, 6) из транспортного в рабочее положение. Путем выдвижения штока 8 (фиг. 1-3, 7) подъемного гидроцилиндра 9 (фиг. 1, 2, 4), в который по напорным трубопроводам (условно не показаны) подается под давлением рабочая жидкость из гидросистемы самоходной концевой станции 3 (фиг. 1, 2, 7), концевая опора 4 (фиг. 1-3, 6) предварительно поворачивается на приблизительно требуемый угол а, не превышающий 120 град. Требуемый угол поворота а определяется, исходя из взаимного высотного расположения на местности самоходных концевых станций 3 (фиг. 1, 2, 7). Если соседняя самоходная концевая станция 3 (фиг. 1, 2, 7) расположена выше, то, как правило, угол а должен быть не менее 90 град, в противном случае угол а должен быть не более 90 град. Далее путем выдвижения штока 40 (фиг. 1, 2, 6, 7) поворотного гидроцилиндра 41 (фиг. 1, 2, 7), в который по напорным трубопроводам (условно не показаны) подается под давлением рабочая жидкость из гидросистемы самоходной концевой станции 3 (фиг. 1, 2, 7), рама 16 (фиг. 1, 2, 7) механизма поворота канатного шкива, а вместе с ней и сам канатный шкив 28 (фиг. 1, 2, 5-7) предварительно поворачиваются вокруг полуосей 36 (фиг. 5, 6) относительно продольной оси концевой опоры 4 (фиг. 1-3, 6) на приблизительно требуемый угол, не превышающий 90 град. Этот угол определяется, исходя из необходимости соответствия угла наклона к горизонту плоскости канатного шкива 28 (фиг. 1, 2, 5-7) и угла наклона к горизонту продольной оси несуще-тягового каната 29 (фиг. 2, 5-7) при установке обеих самоходных концевых станций 3 (фиг. 1, 2, 7) в рабочее положение. На втором этапе установки концевой опоры 4 (фиг. 1-3, 6), который носит регулировочный характер, путем дополнительного (корректирующего) выдвижения штока 8 (фиг. 1-3, 7) подъемного гидроцилиндра 9 (фиг. 1, 2, 4), в который по напорным трубопроводам (условно не показаны) подается под давлением рабочая жидкость из гидросистемы самоходной концевой станции 3 (фиг. 1, 2, 7), концевая опора 4 (фиг. 1-3, 6) поворачивается в пределах нескольких градусов, что приводит к получению окончательного значения требуемого угла а, не превышающего 120 град. Дополнительный (корректирующий) поворот концевой опоры 4 (фиг. 1-3, 6) позволяет создать рабочее натяжение несуще-тягового каната. Далее путем дополнительного (корректирующего) движения (выдвижения или обратного движения) штока 40 (фиг. 1, 2, 6, 7) поворотного гидроцилиндра 41 (фиг. 1, 2, 7), в который по напорным трубопроводам (условно не показаны) подается под давлением рабочая жидкость из гидросистемы самоходной концевой станции 3 (фиг. 1, 2, 7), рама 16 (фиг. 1, 2, 7) механизма поворота канатного шкива, а вместе с ней и сам канатный шкив 28 (фиг. 1, 2, 5-7) дополнительно поворачиваются вокруг полуосей 36 (фиг. 5, 6) относительно продольной оси концевой опоры 4 (фиг. 1-3, 6) на несколько градусов, что приводит к получению окончательного значения требуемого угла наклона канатного шкива 28 (фиг. 1, 2, 5-7), не превышающего 90 град. Дополнительный (корректирующий) поворот канатного шкива 28 (фиг. 1, 2, 5-7) обеспечивает точное согласование расположения продольной оси несуще-тягового каната 29 (фиг. 2, 5-7) плоскости канатного шкива 28 (фиг. 1, 2, 5-7), что исключает повышенный износ профилированного ручья шкива 28 (фиг. 1, 2, 5-7) и самого каната 29 (фиг. 2, 5-7), повышает ресурс работы элементов канатной системы мобильной канатной дороги и безопасность ее эксплуатации. Требование поворота концевой опоры 4 (фиг. 1-3, 6) на угол а, не превышающий 120 град, совместно с требованием поворота плоскости канатного шкива 28 (фиг. 1, 2, 5-7) на угол, не превышающий 90 град, позволяет обеспечить угол (3 наклона оси несуще-тягового каната по отношению к горизонту в пределах до 60 град, что позволяет использовать мобильный транспортно-перегрузочный комплекс при различных типах рельефа земной поверхности, в том числе, в горных условиях при значительном перепаде высот мест расположения самоходных концевых станций 3 (фиг. 1, 2, 7).
Как вариант исполнения, концевая опора 4 (фиг. 1-3, 6) имеет телескопическую конструкцию. Она состоит из нижней поворотной секции 45 (фиг. 7) и верхней выдвижной секции 46 (фиг. 7), имеющей возможность линейного движения (выдвижения или возврата) вдоль продольной оси концевой опоры 4 (фиг. 1-3, 6). Обе секции кинематически связаны между собой гидроцилиндром телескопирования 47 (фиг. 7). Узел крепления гидроцилиндра телескопирования 47 (фиг. 7) к нижней поворотной секции 45 (фиг. 7) представляет собой цилиндрический шарнир, образованный парой проушин 48 (фиг. 7), неподвижно закрепленных, например, сваркой на боковых сторонах металлоконструкции нижней поворотной секции 45 (фиг. 7), в соосные отверстия которых вставлен шарнирный палец 49 (фиг. 7) с надетой на него серьгой торцевой крышки 50 (фиг. 7) гидроцилиндра телескопирования 47 (фиг. 7) (конструкция шарнира аналогична показанной на фиг. 4). Узел крепления гидроцилиндра телескопирования 47 (фиг. 7) к верхней выдвижной секции 46 (фиг. 7) представляет собой цилиндрический шарнир, образованный парой профилированных проушин 51 (фиг. 7), неподвижно закрепленных, например, сваркой на боковых сторонах металлоконструкции верхней выдвижной секции 46 (фиг. 7), в соосные отверстия которых вставлен шарнирный палец 52 (фиг. 7) с надетой на него крепежной втулкой штока 53 (фиг. 7) гидроцилиндра телескопирования 47 (фиг. 7) (конструкция шарнира аналогична показанной на фиг. 3).
Принцип работы самоходной концевой станции с концевой опорой 4 (фиг. 1-3, 6) телескопической конструкции аналогичен рассмотренному выше. Дополнительно при переводе концевой опоры 4 (фиг. 1-3, 6) из транспортного в рабочее положение после предварительного поворота нижней поворотной секции 45 (фиг. 7) на приблизительно требуемый угол а, не превышающий 120 град, выполняется телескопирование верхней выдвижной секции 46 (фиг. 7) путем выдвижения штока 53 (фиг. 7) гидроцилиндра телескопирования 47 (фиг. 7), в который по напорным трубопроводам (условно не показаны) подается под давлением рабочая жидкость из гидросистемы самоходной концевой станции 3 (фиг. 1, 2, 7).
Технико-экономический результат от внедрения полезной модели достигается за счет расширения возможности эксплуатации мобильных канатных дорог при различных параметрах рельефа земной поверхности, в том числе, со значительными перепадами высот местности вследствие достаточно качественного согласования взаимного расположения канатных шкивов и несуще-тягового каната в одной плоскости, что повышает ресурс работы дорогостоящих элементов канатной системы и безопасность эксплуатации мобильной канатной дороги в целом. Дополнительный технико-экономический эффект связан с повышением автоматизации действий обслуживающего персонала по переводу концевых опор из рабочего положения в транспортное и обратно, что снижает продолжительность вспомогательных технологических операций при развертывании/демонтаже мобильной канатной дороги.
Источники информации
1. Пат. 84181 Российская Федерация, МПК A01G 23/02. Тыловая мачта для мобильной канатной трелевочной установки / Григорьев И.В., Жукова А.И., Иванов А.В., Григорьева О.И., Киселев Д.С. - №2009107586/22; заявл. 04.03.2009; опубл. 10.07.2009, Бюл. №19.
2. Пат. 2247671 Российская Федерация, МПК В61В 7/00. Подвесная канатная дорога / Короткий А.А., Хальфин М.Н., Котельников B.C., Попиашвили Б.Д., Короткий Д.А., Козловский А.Е., Рыпинский Ю.В.; заявитель и патентообладатель ООО "Инженерно-консультационный центр "Мысль" Новочеркасского государственного технического университета. - №2003125033/11; заявл. 11.08.2003; опубл. 10.03.2005, Бюл. №7.
3. Диагностирование грузоподъемных машин / Под ред. В.И. Сероштана, Ю.С. Огаря. М.: Машиностроение, 1992. 192 с.
4. Лагерев А.В., Лагерев И.А. Современная теория манипуляционных систем мобильных многоцелевых транспортно-технологических машин и комплексов. Исследование рабочих процессов и проектирование элементов гидропривода. Брянск: РИСО БГУ, 2019. - 201 с.
5. Лагерев И.А., Лагерев А.В. Современная теория манипуляционных систем мобильных многоцелевых транспортно-технологических машин и комплексов. Конструкция и условия эксплуатации. Брянск: РИО БГУ, 2018. - 190 с.


Реферат
Полезная модель относится к области подъемно-транспортного машиностроения, а именно к устройствам на основе подвесных канатных систем для мобильного развертывания транспортно-перегрузочных грузовых и пассажирских дорог в условиях необорудованной и труднодоступной местности, при ликвидации природных или техногенных чрезвычайных ситуаций. Самоходная концевая станция, в виде оборудованного аутригерами и анкерами мобильного шасси предназначена для применения с другим аналогичным шасси, в составе мобильного транспортно-перегрузочного канатного комплекса и содержит приводной и натяжной механизмы, закрепленную на ее несущей раме концевую опору с расположенным на ней канатным шкивом и огибающий канатный шкив замкнутый натянутый несуще-тяговый канат с прицепными устройствами для подвески транспортируемых грузов. При этом концевая опора своим нижним концом шарнирно крепится к несущей раме самоходной концевой станции и имеет возможность перемещения в вертикальной плоскости, совпадающей с продольной осью мобильного шасси, на произвольный угол не более 120 градусов с помощью подъемного гидроцилиндра, а шарнирно закрепленный на оголовке концевой опоры канатный шкив снабжен механизмом поворота на угол не более 90 градусов с помощью поворотного гидроцилиндра. Технический результат заявленной полезной модели состоит в обеспечении возможности установки и регулирования пространственного положения концевых опор мобильного транспортно-перегрузочного канатного комплекса с целью согласования взаимного расположения канатных шкивов и несуще-тягового каната в одной плоскости, независимо от перепада высот в местах установки самоходных концевых станций и от взаимного расположения самоходных концевых станций по отношению друг к другу, а также автоматизация действий обслуживающего персонала по переводу концевых опор из рабочего положения в транспортное и обратно. 7 ил.
Комментарии