Комплекс оборудования канатной подвесной дороги - RU2730296C2
Код документа: RU2730296C2
Чертежи
Описание
Предпосылки создания изобретения
Изобретение относится к канатным подвесным дорогам и, более конкретно, к комплексам оборудования канатных подвесных дорог с подвесными тяговыми канатами.
Уровень техники
В настоящее время посадка пассажиров в/на транспортные средства из комплекса оборудования канатной подвесной дороги представляет собой мероприятие, требующее осторожности. В случае некоторых комплексов оборудования с вагонами канатной подвесной дороги или кресельными подъемниками пассажиры должны осуществлять посадку, когда транспортные средства движутся, и может существовать риск несвоевременного столкновения между транспортным средством и пассажиром, когда последний размещен неправильным образом относительно транспортного средства. Это особенно относится к кресельным подъемникам, когда пассажиры должны ожидать перед креслами, чтобы произвести посадку. Несвоевременное столкновение относится к ситуации, когда несколько пассажиров могут пытаться произвести посадку на одно и то же сиденье кресла или когда они находятся рядом с креслом и подвержены толканию креслом и падению без возможности забраться на сиденье кресла. Следовательно, перемещение транспортных средств должно быть остановлено для эвакуации или изменения мест нахождения людей, которые находятся в неправильных положениях. Для избежания какого-либо риска столкновения оператор несет ответственность за помощь пассажирам при посадке и за остановку комплекса оборудования каждый раз, когда грозит риск столкновения.
Следовательно, существует потребность в контролировании посадки пассажиров в/на движущиеся транспортные средства для предотвращения какого-либо риска несвоевременного столкновения.
Задача изобретения
Задача изобретения состоит в уменьшении данных недостатков и, более конкретно, в обеспечении комплекса оборудования, снабженного средствами для выявления рисков столкновения между пассажирами и транспортными средствами и для избежания ряда преждевременных остановок комплекса оборудования.
В соответствии с одним объектом изобретения предложен комплекс оборудования канатной подвесной дороги, содержащий, по меньшей мере, одно транспортное средство, предназначенное для его перемещения посредством каната, терминал посадки пассажиров, содержащий зону посадки, в которой размещены пассажиры для посадки на транспортное средство, и приводной двигатель транспортного средства в зоне посадки.
Комплекс оборудования содержит устройство получения изображений, которое формирует, по меньшей мере, одно изображение, отображающее транспортное средство и пассажиров в зоне посадки, и электронное устройство управления, выполненное с конфигурацией, обеспечивающей возможность определения зоны наблюдения вокруг транспортного средства и мест нахождения пассажиров на указанном, по меньшей мере, одном отображающем изображении и генерирования заданной скорости для двигателя в соответствии с местами нахождения пассажиров в зоне наблюдения.
Таким образом, предусмотрены автоматизированные средства для предотвращения рисков несчастных случаев при посадке пассажиров. Также повышается производительность комплекса оборудования, поскольку скорость транспортных средств можно регулировать в соответствии с конфигурацией зоны посадки. Ситуации грозящего риска несчастных случаев идентифицируются для остановки канатной подвесной дороги только в случае необходимости, то есть когда больше нельзя осуществить изменение мест нахождения пассажиров до правильной конфигурации.
Комплекс оборудования может содержать опору, расположенную над зоной посадки, при этом устройство получения изображений смонтировано на опоре непосредственно над зоной посадки.
Устройство получения изображений может формировать несколько отображающих изображений.
Устройство получения изображений может представлять собой цифровую видеокамеру или тепловизор.
Зона наблюдения может включать в себя две боковые зоны столкновений, расположенные с каждой стороны транспортного средства, и электронное устройство управления генерирует заданный останов транспортного средства, когда, по меньшей мере, один пассажир находится в боковой зоне столкновения.
Транспортное средство может представлять собой кресло, содержащее, по меньшей мере, два сиденья для соответствующей посадки, по меньшей мере, двух пассажиров.
Зона наблюдения также может включать в себя переднюю опасную зону, расположенную спереди от транспортного средства, и электронное устройство управления генерирует заданный останов транспортного средства, когда число пассажиров, присутствующих в передней опасной зоне, превышает число сидений транспортного средства.
Передняя опасная зона может содержать, по меньшей мере, две дорожки, расположенные соответственно напротив указанных, по меньшей мере, двух сидений транспортного средства, и электронное устройство управления генерирует заданный останов транспортного средства, когда более одного пассажира присутствует на, по меньшей мере, одной дорожке передней опасной зоны.
Зона наблюдения может включать в себя безопасную зону, расположенную спереди от передней опасной зоны и содержащую, по меньшей мере, две дорожки, расположенные соответственно напротив указанных, по меньшей мере, двух сидений транспортного средства, и электронное устройство управления генерирует начальную заданную скорость транспортного средства, когда самое большее один пассажир присутствует на каждой дорожке безопасной зоны.
Электронное устройство управления может генерировать заданную скорость, более низкую, чем начальная скорость транспортного средства, когда более одного пассажира присутствует на, по меньшей мере, одной дорожке безопасной зоны.
Электронное устройство управления может генерировать заданную скорость, более низкую, чем начальная скорость транспортного средства, когда число пассажиров, присутствующих в безопасной зоне, больше числа сидений транспортного средства.
Зона посадки может содержать зону отправления, и электронное устройство управления генерирует заданный останов транспортного средства, когда транспортное средство расположено в зоне отправления и когда число пассажиров, присутствующих в передней опасной зоне, превышает число сидений транспортного средства.
Электронное устройство управления может дополнительно генерировать заданный останов транспортного средства, когда транспортное средство расположено в зоне отправления и более одного пассажира присутствует на, по меньшей мере, одной дорожке передней опасной зоны.
Краткое описание чертежей
Другие преимущества и признаки станут более очевидными из нижеследующего описания конкретных вариантов осуществления изобретения, приведенных только в качестве неограничивающего примера и представленных на приложенных чертежах, на которых:
- фиг.1 схематически иллюстрирует один вариант осуществления комплекса оборудования канатной подвесной дороги в соответствии с изобретением; и
- фиг.2-5 схематически иллюстрируют виды сверху зоны посадки в комплексе оборудования.
Подробное описание
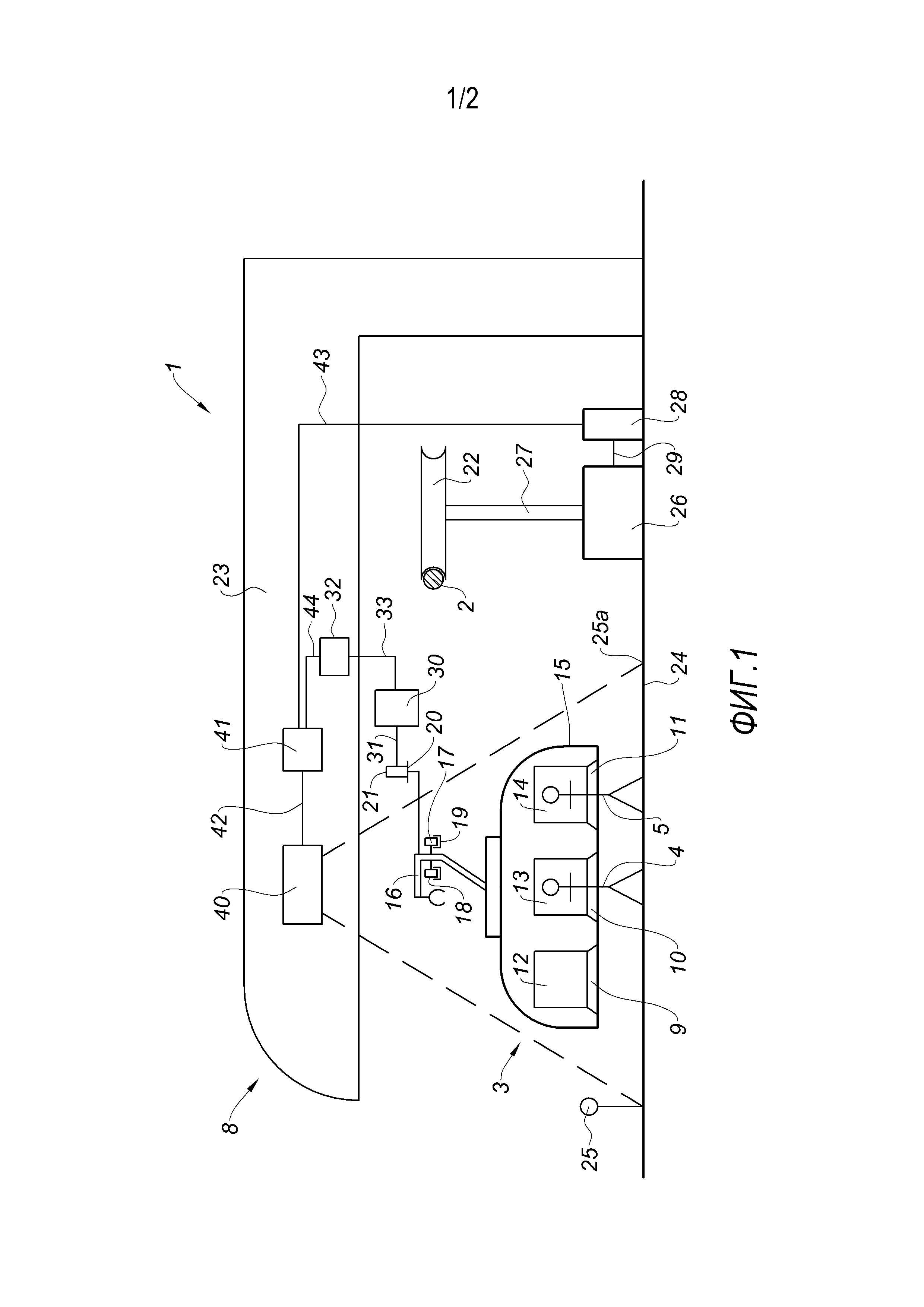
На фиг.1 был представлен один вариант осуществления комплекса 1 оборудования канатной подвесной дороги. Комплекс 1 оборудования содержит, по меньшей мере, одно транспортное средство 3, предназначенное для его перемещения посредством каната 2, предусмотренного в комплексе оборудования для транспортирования пассажиров 4-7. Комплекс 1 оборудования предпочтительно представляет собой кресельный подъемник, например, одноканатного типа. Кресельный подъемник, как правило, содержит несколько транспортных средств 3, представляющих собой кресла, и канат 2 представляет собой подвесной тяговый канат, то есть кресла 3 подвешены над землей. Одно кресло 3 было представлено на фиг.1-5 для упрощения. Кроме того, канат 2 предпочтительно представляет собой как тяговый, так и несущий канат. Комплекс 1 оборудования содержит терминал 8 посадки, где пассажиры 4-7 садятся на кресла 3. Кресла 3, как правило, содержат, по меньшей мере, два сиденья 9-11 или даже несколько сидений, расположенных рядом друг с другом. Каждое сиденье 9-11 предназначено для пассажира 4-7, садящегося на него. Обычно кресло 3 содержит столько спинок 12-14, сколько есть сидений 9-11, несущую конструкцию 15 кресла, к которой прикреплены спинки 12-14 и сиденья 9-11, и предохранительную штангу, смонтированную с возможностью поворота для обеспечения защиты для пассажиров, сидящих на кресле 3, которая не показана для упрощения. Кресла 3 дополнительно содержат захват 16 для фиксации их относительно каната 2. Захват 16 может быть неподвижным, и в этом случае кресла 3 будут постоянно зафиксированы на канате 2. Захват 16 предпочтительно выполнен с возможностью отсоединения, и в этом случае кресла 3 зафиксированы с возможностью отсоединения на канате 2. На фиг.1 был представлен кресельный подъемник с отсоединяемыми креслами, в котором захваты 16 выполнены с возможностью отсоединения. В этом случае отсоединяемый захват 16 содержит два боковых колеса 17, 18, предназначенные для перемещения по направляющим, образующим обходной контур 19, для перемещения транспортных средств 3 с более низкой скоростью по сравнению со скоростью каната 2 для облегчения посадки пассажиров 4-7. Действительно, когда кресла 3 отсоединены от каната 2, они перемещаются в терминале 8 посадки с более низкой скоростью по сравнению со скоростью каната 2. Для перемещения транспортных средств 3 по обходному контуру 19 захваты также снабжены плитой 20, на которой вращающиеся шкивы 21, также называемые шинами, поджимают и толкают кресла 3 для перемещения их по обходному контуру 19. Терминал 8 посадки также содержит зону 24 посадки, в которой пассажиры 4-7 ожидают перед посадкой на транспортные средства 3, и опору 23, расположенную над зоной 24 посадки. Терминал 8 посадки может дополнительно содержать барьер 25, выполненный с возможностью перемещения между закрытым положением, предотвращающим доступ пассажиров 4-7 в зону 24 посадки, и открытым положением, обеспечивающим возможность доступа в зону 24 посадки. В этом случае зона 24 посадки расположена между барьером 25 и линией 25а отправления. Терминал 8 может дополнительно содержать ведущий шкив 22, установленный с возможностью вращения для приведения в движение тягового каната 2, и главный двигатель 26, выполненный с конфигурацией, обеспечивающей возможность приведения в движение ведущего шкива 22 посредством приводного вала 27. В этом случае терминал 8 посадки называют приводным терминалом 8. Терминал 8 посадки также может содержать шкив для натяжения каната, называемый реверсивным шкивом, и в этом случае терминал 8 не содержит главного двигателя 26, и терминал 8 называют терминалом возврата. Приводной терминал 8 был представлен в качестве примера на фиг.1. Управление главным двигателем 26 осуществляется посредством главного устройства 28 управления, соединенного с главным двигателем 26 посредством соединения 29. Главное устройство 28 управления регулирует частоту вращения приводного шкива 22 и, следовательно, скорость каната 2.
Кроме того, когда захваты 16 транспортных средств зафиксированы без возможности отсоединения, перемещение транспортных средств 3 в зоне 24 посадки выполняется посредством тягового каната 2, на котором зафиксированы транспортные средства 3. Когда захваты 16 выполнены с возможностью отсоединения, транспортные средства 3 перемещаются в зоне 24 посадки посредством вращающихся шкивов 21. Действительно, когда вращающиеся шкивы 21 приводятся во вращение, они фактически давят на плиту 20 транспортных средств 3 и могут замедлять, толкать и ускорять транспортные средства 3. Вращающиеся шкивы 21 могут быть выполнены с возможностью приведения их во вращение посредством тягового каната 2, например, шкив для передачи крутящего момента может быть установлен в терминале 8 в контакте с тяговым канатом 2 и может быть соединен с вращающимися шкивами 21 посредством устройства передачи крутящего момента. Таким образом, главное устройство 28 управления регулирует скорость перемещения транспортных средств 3 в терминале 8 посадки.
В качестве варианта терминал 8 может содержать вспомогательный двигатель 30, выполненный с конфигурацией, обеспечивающей возможность приведения в движение вращающихся шкивов 21 посредством вспомогательных валов 31. Управление вспомогательным двигателем 30 осуществляется посредством вспомогательного устройства 32 управления, соединенного со вспомогательным двигателем 30 посредством соединения 33. Таким образом, вспомогательное устройство 32 управление регулирует частоту вращения вращающихся шкивов 21 и, следовательно, скорость перемещения транспортных средств 3 в терминале 8 посадки.
Комплекс 1 оборудования подвесной канатной дороги дополнительно содержит устройство 40 получения изображений, электронное устройство 41 управления, соединенное с устройством 40 посредством соединения 42. Кроме того, электронное устройство 41 управления соединено с главным устройством 28 управления посредством соединения 43. Когда терминал содержит вспомогательный двигатель 30, электронное устройство управления соединено с вспомогательным устройством 32 управления посредством соединения 44.
Устройство 40 получения изображений выполнено с конфигурацией, обеспечивающей возможность получения одного или более следующих одно за другим изображений I1-I4 зоны 24 посадки, транспортных средств 3 и пассажиров 4-7 в зоне 24 посадки. Когда транспортные средства 3 перемещаются через зону 24 посадки, устройство 40 может формировать изображения I1-I4, отображающие зону 24 посадки, транспортные средства 3 и пассажиров 4-7 в зоне 24 посадки. Устройство 40 может представлять собой цифровую видеокамеру или тепловизор. Устройство 40 может быть расположено близко к зоне 24 посадки, то есть снаружи последней. Устройство 40 предпочтительно смонтировано на опоре 23 непосредственно над зоной 24 посадки. Опора 23 может представлять собой крышу, балку, портал или по существу раму.
Электронное устройство 41 управления получает изображения I1-I4, сформированные и переданные устройством 40. Электронное устройство 41 управления выполнено с конфигурацией, обеспечивающей возможность обработки изображений I1-I4. Например, электронное устройство 41 управления содержит процессор и обычно электронные схемы, предназначенные для выполнения логических операций обработки изображений. Процессор может представлять собой графический процессор, предусмотренный с запоминающими устройствами, вычислителями и компараторами, конфигурированными для выполнения команд алгоритмов обработки изображений.
Электронное устройство 41 управления также может генерировать заданные скорости и передавать их посредством соединения 44 вспомогательному двигателю 30 или главному двигателю 26 для регулирования скорости перемещения кресел 3 в соответствии с обработкой изображений I1-I4. Кроме того, электронное устройство 41 управления может генерировать сигнальную информацию, предназначенную для сигнального устройства 50, расположенного в терминале 8 посадки. Сигнальное устройство 50 может представлять собой световой индикатор или звукоизлучающее устройство, или механическую сигнальную систему. Сигнальное устройство 50 позволяет осуществлять индикацию того, является ли конфигурация зоны 24 посадки годной или нет.
Электронное устройство 41 управления выполнено с конфигурацией, обеспечивающей возможность определения - из каждого полученного изображения I1-I4 - зоны 60 наблюдения вокруг транспортного средства 3 на изображении I1-I4. Электронное устройство 41 управления также определяет места нахождения пассажиров 4-7 на изображении I1-I4 и, в частности, места нахождения пассажиров относительно транспортного средства 3 и, более конкретно, их положение относительно зоны 60 наблюдения. Другими словами, электронное устройство 41 управления определяет присутствие или отсутствие пассажира 4-7 в зоне 60 наблюдения и их положения в зоне 60 наблюдения для регулирования скорости транспортного средства 3 в соответствии с риском ситуации. Электронное устройство 41 управления генерирует заданную скорость для вспомогательного двигателя 30 или главного двигателя 26 в соответствии с положениями/местами нахождения пассажиров в зоне 60 наблюдения.
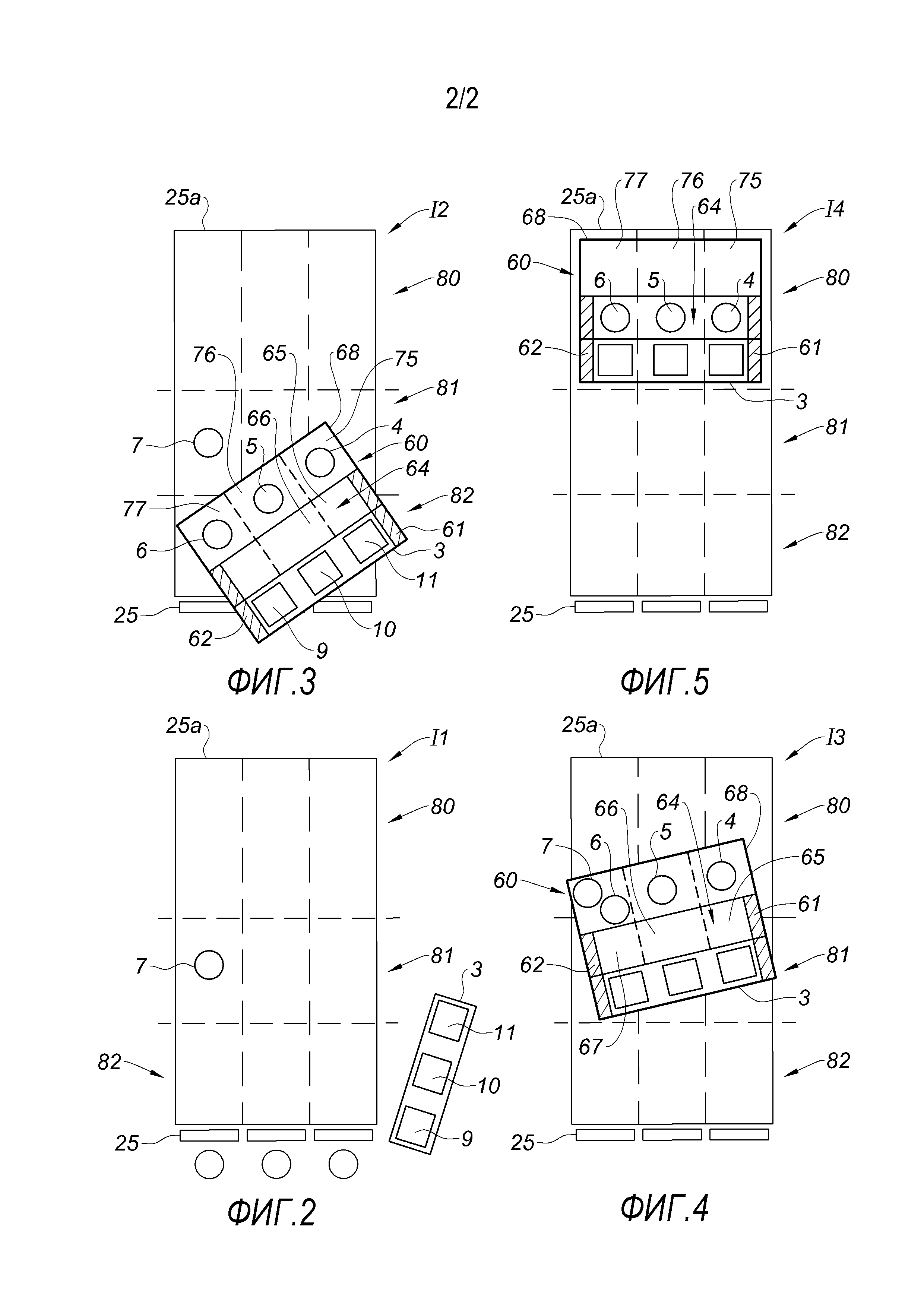
На фиг.2-5 были соответственно представлены четыре изображения I1-I4, обработанные электронным устройством 41 управления. Как правило, зона 60 наблюдения включает в себя две боковые зоны 61, 62 столкновений, расположенные с каждой стороны транспортного средства 3, и электронное устройство 41 управления генерирует заданный останов транспортных средств, когда, по меньшей мере, один пассажир 4-7 находится в боковой зоне 61, 62 столкновения. Таким образом, предотвращается любой риск столкновения между транспортным средством 3 и пассажиром 4-7, который находится рядом с боковой стороной транспортного средства 3 и который не может осуществить посадку на транспортное средство 3. Зона 60 наблюдения дополнительно включает в себя переднюю опасную зону 64, находящуюся спереди от транспортного средства 3, и электронное устройство 41 управления генерирует заданный останов транспортных средств 3, когда число пассажиров 4-7, присутствующих в передней зоне 64, превышает число сидений 9-11 транспортных средств 3. Данная конфигурация может возникать, когда имеется больше пассажиров, чем сидений, находящихся в зоне 24 посадки. Таким образом, когда пассажиры 4-7 находятся слишком близко к креслу 3 и их число превышает число сидений 9-11, не все пассажиры 4-7 могут произвести посадку на кресельный подъемник, и в этом случае приведение транспортных средств 3 в движение прекращается.
Передняя опасная зона 64 предпочтительно содержит столько же дорожек 65-67, сколько сидений 9-11. Каждая дорожка 65-67 передней опасной зоны 64 расположена напротив сиденья 9-11 транспортного средства 3. Электронное устройство 41 управления дополнительно генерирует заданный останов транспортных средств 3, когда более одного пассажира присутствует, по меньшей мере, на одной дорожке 65-67 передней опасной зоны 64.
Зона 60 наблюдения может также включать в себя безопасную зону 68, расположенную спереди от передней опасной зоны 64 и содержащую столько же дорожек 75-77, сколько сидений 9-11. Каждая дорожка безопасной зоны 68 расположена напротив сиденья 9-11 транспортного средства 3. В частности, дорожки 75-77 безопасной зоны 68 соответственно находятся на продолжении дорожек 65-67 передней опасной зоны 64. При этом электронное устройство 41 управления может генерировать заданное уменьшение скорости транспортных средств 3, когда более одного пассажира 4-7 присутствует на, по меньшей мере, одной дорожке 75-77 безопасной зоны 68. Уменьшение скорости транспортных средств 3 создает возможность наличия достаточного времени, чтобы пассажиры 4-7 могли переместиться в надлежащее положение для обеспечения возможности их посадки на транспортное средство 3.
Электронное устройство 41 управления также может генерировать заданное уменьшение скорости транспортных средств 3, когда число пассажиров 4-7, присутствующих в безопасной зоне 68, превышает число сидений 9-11 транспортных средств 3.
Кроме того, зона 24 посадки может содержать, по меньшей мере, одну зону 80 отправления и зону 81 подготовки. В качестве варианта зона 24 посадки может содержать третью зону 82 входа, смежную с зоной 81 подготовки. Электронное устройство 41 управления может генерировать заданный останов транспортных средств 3, когда транспортное средство 3 находится в зоне 80 отправления и когда число пассажиров 4-7, присутствующих в передней опасной зоне 64, превышает число сидений 9-11 транспортного средства 3, или когда более одного пассажира 4-7 присутствует на, по меньшей мере, одной дорожке передней опасной зоны 64.
Обычно для посадки на кресло 3 кресельного подъемника надлежащим образом один пассажир 4-7 должен быть размещен напротив сиденья 9-11. В этом случае утверждается, что конфигурация пассажиров или конфигурация зоны 24 посадки является годной. Следовательно, электронное устройство 41 управления обеспечивает возможность определения конфигурации, связанной с риском, то есть, когда число пассажиров 4-7, находящихся в безопасной зоне 68, превышает число сидений 9-11 или когда более одного пассажира находится на дорожке безопасной зоны 68. В этом случае, тем не менее, может быть получена годная конфигурация, в которой имеется не более одного пассажира в расчете на дорожку безопасной зоны 68. Например, существует возможность перейти от конфигурации, связанной с риском, к годной конфигурации посредством изменения мест нахождения пассажиров 4-7 таким образом, чтобы имелся один пассажир на одну дорожку безопасной зоны 68. Лишние пассажиры также могут быть удалены из зоны 24 посадки. При условии, что конфигурация зоны 24 посадки является годной, транспортные средства 3 приводятся в движение в зоне 24 посадки с начальной скоростью. Когда транспортные средства 3 снабжены фиксированными захватами, начальная скорость соответствует скорости каната 2. Когда транспортные средства 3 снабжены отсоединяемыми захватами, начальная скорость ниже, чем скорость каната 2. Когда электронное устройство 41 управления определяет конфигурацию, связанную с риском, оно генерирует заданную скорость для регулирования скорости перемещения транспортного средства 3. Более конкретно, величина заданной скорости меньше начальной скорости для замедления транспортных средств 3. В частности, когда транспортное средство 3 находится в зоне 82 входа и когда определена конфигурация, связанная с риском, скорость транспортных средств 3 изменяется до первой скорости, более низкой, чем начальная скорость. Когда транспортное средство 3 находится в зоне 81 подготовки и когда определена конфигурация, связанная с риском, скорость транспортных средств изменяется до второй скорости, более низкой, чем первая скорость. Когда транспортное средство 3 находится в зоне 80 отправления и когда определена конфигурация, связанная с риском, транспортные средства 3 останавливаются, поскольку годная конфигурация больше не может быть получена.
Электронное устройство 41 управления может определить опасную конфигурацию, то есть конфигурацию, когда имеется, по меньшей мере, один пассажир, находящийся в, по меньшей мере, одной боковой опасной зоне 61, 62, или когда число пассажиров 4-7, находящихся в опасной зоне 64, превышает число сидений 9-11. В этом случае годная конфигурация больше не может быть получена, и электронное устройство управления останавливает перемещение транспортных средств 3. И наоборот, когда электронное устройство 41 управления определяет, что больше нет конфигурации, связанной с риском, или опасной конфигурации, оно восстанавливает начальную заданную скорость для сохранения максимальной скорости пропускания пассажиров 4-7.
Другими словами, электронное устройство 41 управления генерирует начальную заданную скорость транспортных средств 3, когда самое большее один пассажир 4-7 присутствует на каждой дорожке 65-67 передней опасной зоны 64 или когда самое большее один пассажир присутствует на каждой дорожке безопасной зоны 68, то есть тогда, когда конфигурация является годной. В этом случае электронное устройство 41 управления сохраняет перемещение транспортных средств 3 с начальной скоростью. Когда электронное устройство 41 управления определит опасную конфигурацию или конфигурацию, связанную с риском, оно регулирует скорость транспортных средств соответственно путем останова или уменьшения скорости. Когда электронное устройство управления определит годную конфигурацию после опасной конфигурации или конфигурации, связанной с риском, оно снова обеспечит ускорение транспортных средств с переходом от уменьшенной скорости к начальной скорости.
Зона 60 наблюдения, боковые зоны 61, 62 столкновений, передняя опасная зона 64 и безопасная зона 68 могут соответственно иметь прямоугольные формы, подобные показанным на фиг.2-5. Кроме того, зоны 60-62, 64 и 68 могут иметь другие формы, такие как полукруглые, трапециевидные или в более общем случае четырехугольную форму.
В качестве варианта размеры безопасной зоны 68 и опасной зоны 64 могут варьироваться в соответствии со скоростью перемещения транспортных средств 3. Также может быть предусмотрено то, что размер безопасной зоны 68 и опасной зоны 64 может варьироваться в соответствии с положением транспортного средства 3 или в зоне 80 отправления, или в зоне 81 подготовки, или в зоне 82 входа. Размер зон 64, 68 может увеличиваться, когда скорость перемещения транспортных средств 3 увеличивается, или может быть уменьшен, когда скорость перемещения транспортных средств 3 уменьшена. В качестве варианта, чем в большей степени транспортное средство 3 приближается к зоне 80 отправления, тем в большей степени увеличивается размер безопасной зоны 68 и опасной зоны 64. В соответствии с другим вариантом осуществления размер зон 64 и 68 остается постоянным.
На фиг.2 транспортное средство 3 находится вне зоны 60 наблюдения, и перемещение транспортных средств 3 в терминале 8 выполняется с начальной скоростью перемещения. На фиг.3 транспортное средство 3 расположено в зоне 82 входа, и три пассажира 4-6 соответственно находятся на трех дорожках безопасной зоны 68. В данном случае начальная скорость сохраняется, поскольку конфигурация является годной и не представляет никакой опасности. На фиг.4 транспортное средство 3 находится в зоне 81 подготовки, и число пассажиров 4-7, присутствующих в безопасной зоне 68, превышает число сидений 9-11, при этом в данном случае скорость уменьшается, и заданная скорость передается вспомогательному двигателю 30 для перемещения транспортных средств со второй скоростью, описанной выше. На фиг.5 конфигурация является годной, и скорость перемещения сохраняется равной второй скорости или может быть равна начальной скорости, и транспортное средство может покинуть терминал 8 с пассажирами, размещенными на сиденьях транспортного средства 3.
Реферат
Изобретение относится к комплексу оборудования канатной дороги. Комплекс оборудования канатной подвесной дороги содержит, по меньшей мере, одно транспортное средство (3), предназначенное для его перемещения посредством каната (2), терминал (8) посадки пассажиров, содержащий зону (24) посадки, в которой размещены пассажиры (4-7) для посадки на транспортное средство (3), приводной двигатель (26, 30) транспортного средства (3) в зоне (24) посадки, устройство (40) получения изображений, которое формирует, по меньшей мере, одно изображение, отображающее транспортное средство (3) и пассажиров (4, 5) в зоне (24) посадки, и электронное устройство (41) управления, выполненное с конфигурацией, обеспечивающей возможность определения зоны наблюдения вокруг транспортного средства (3) и мест нахождения пассажиров (4, 5) на указанном, по меньшей мере, одном отображающем изображении и генерирования заданной скорости для двигателя (26, 30) в соответствии с местами нахождения пассажиров (4, 5) в зоне наблюдения. В результате предотвращается риск несчастных случаев, повышается производительность оборудования. 13 з.п. ф-лы, 5 ил.
Комментарии