Комплексная система автоматизации управления сортировочным процессом (ксау сп) - RU2737815C1
Код документа: RU2737815C1
Чертежи
Описание
Изобретение относится к устройствам автоматики и телемеханики на железнодорожном транспорте, а именно к системам, предназначенным для автоматизации технологического процесса на сортировочной горке станции.
Известен комплекс горочный микропроцессорный на базе промышленных компьютеров (КГМ ПК), содержащий взаимосвязанные между собой путевые устройства и программно-аппаратный комплекс, обеспечивающие расчет переменной скорости роспуска, контроль расцепа отцепов, управление маршрутами их движения и контроль хода роспуска, регулирование скоростей скатывания отцепов по тормозным позициям, контроль заполнения путей, учет накопления вагонов в зоне парка формирования, оперативное управление и отображение хода роспуска, а также обмен информацией с АСУ СС (В.Н.Иванченко, С.М.Ковалев, А.Н.Шабельников. Новые информационные технологии: информационно-управляющая система автоматизации процесса расформирования-формирования поездов, Ростов-на-Дону: РГУПС, 2002, с.188-193).
Недостатком этой системы является то, что указанная система не обеспечивает должный уровень надежности и безопасности работы из-за отсутствия возможности выявления предотказных состояний напольных устройств и некорректного расчета скоростей выхода отцепов из тормозных позиций, поскольку расчет осуществляется только по весу, длине отцепов и их скорости, без учета влияния текущих метеоусловий, изменяющих ходовые свойства вагонов.
Наиболее близким техническим решением, выбранным в качестве прототипа, является комплексная система автоматизации управления сортировочным процессом (КСАУ СП), содержащая взаимоувязанный с путевыми устройствами и исполнительным оборудованием комплекс программно-аппаратных средств, объединенных в нескольких промышленных компьютерах и предназначенных для расчета переменной скорости роспуска, контроля расцепа отцепов, управления маршрутами движения отцепов, контроля хода роспуска с контролем заполнения путей подгорочного парка, регулирования скоростей скатывания отцепов, учета накопления вагонов, оперативного управления и отображения хода роспуска и обмена информацией с автоматизированной системой управления сортировочной станцией, по меньшей мере, один интерактивный микропроцессорный пульт, предназначенный для отображения информации о состоянии напольного оборудования и управления средствами централизации и механизации сортировочной горки с поста управления, сервер баз данных, содержащий конфигурационные данные конкретной сортировочной горки и предназначенный для протоколирования работы напольного оборудования и действий оперативного персонала и работы системы, метеостанцию, предназначенную для определения состояния внешней среды, влияющего на ходовые свойства скатывающихся вагонов и учитываемого при расчете скоростей выхода отцепов из тормозных позиций, модуль поддержки принятия решений для эксплуатационного и обслуживающего персонала, связанный с автоматизированным рабочим местом электромеханика сортировочной горки и с неограниченным количеством автоматизированных рабочих мест, подключаемых по принципу «тонкий клиент», и модуль управления компрессорной станцией, предназначенный для оптимизации работы компрессорных установок, подающих сжатый воздух в пневмосистему замедлителей (RU95623U1, B61L17/00, 10.07.2010).
Недостатком этой системы является то, что указанная система не обеспечивает автоматизацию маневровых перестановок между роспусками, не обеспечивает должный уровень надежности и безопасности работы из-за отсутствия «горячего резервирования» в режиме реального времени.
Техническим результатом предлагаемого изобретения является повышение надежности и безопасности за счет «горячего резервирования» управляющего оборудования и повышение перерабатывающей способности сортировочной горки за счет автоматизации маневровых перестановок вагонов между роспусками.
Технический результат изобретения достигается тем, что комплексная система автоматизации управления сортировочным процессом на железнодорожном транспорте содержит взаимодействующие с устройствами контроля и исполнительными устройствами напольного оборудования сортировочной горки основной и резервный комплексы аппаратно-программного управления, каждый из которых включает последовательно соединенные модуль формирования маршрутных заданий, модуль формирования описателей отцепов, модуль трансляции маршрутных заданий и модуль управления стрелками и реализации их автовозврата, выходы и входы которого подключены соответственно к входам и выходам блоков управления стрелок и реле контроля состояния стрелок, модуль контроля исполнения маршрутов и маневровых передвижений, последовательно соединенные модуль расчета скорости выхода из тормозных позиций и модуль реализации расчетной скорости, подключенный входами к выходам датчиков счета осей, расположенных в зоне замедлителей, и радиолокационных измерителей скорости, выходами/входами – к входам/выходам аппаратуры контроля и управлении замедлителей, а выходом - к входу модуля управления компрессорной станцией для оптимизации работы компрессорных установок, подающих сжатый воздух в пневмосистему замедлителей, и модуль автоматизированного управления маневровыми передвижениями, причем модуль формирования маршрутных заданий и модуль контроля исполнения маршрутов и маневровых передвижений взаимодействуют с аппаратно-программным устройством автоматизированного рабочего места дежурного по горке, размещенным на посту управления, а через модуль связи - с аппаратно-программным комплексом автоматизированной системы управления сортировочной станцией, модуль формирования описателей отцепов другими входами соединен с выходами датчиков счета осей и радиолокационным датчиком свободности на измерительном участке, модуль трансляции маршрутных заданий другими входами соединен с выходами расположенных на спускной части сортировочной горки датчиков счета осей и с реле контроля состояния рельсовых цепей и положения стрелок, входы модуля расчета скорости выхода из тормозных позиций подключены к соответствующему выходу модуля трансляции маршрутных заданий, выходам метеостанции и модуля обработки сигналов, входом подключенного к выходу аппаратуры контроля заполнения путей, входы/выходы модуля контроля исполнения маршрутов и маневровых передвижений подключены к выходам/входам модуля трансляции маршрутных заданий, вход/выход модуля автоматизированного управления маневровыми передвижениями соединены с выходом/входом расположенного на посту управления микропроцессорного интерактивного пульта контроля и управления, другие входы/выходы которого подключены к входам/выходам исполнительных и контрольных устройств напольного оборудования, информационные выходы модулей комплексов аппаратно-программного управления через сеть Ethernet соединены с соответствующими входами микропроцессорного интерактивного пульта контроля и управления и сервера баз данных, другой вход которого соединен с выходом контроллера сбора информации, вход которого подключен к выходам исполнительных горочных устройств, выход сервера баз данных соединен с входом модуля поддержки принятия решений для эксплуатационного и обслуживающего персонала, первый выход которого подключен через модуль связи к аппаратно-программному комплексу системы технического мониторинга и диагностики, а второй выход -– к входу аппаратно-программного устройства автоматизированного рабочего места электромеханика сортировочной горки, другой вход которого соединен с другим выходом сервера баз данных, система включает также контроллер безопасности, входы/выходы которого по сети Ethernet подключены к соответствующим входам/выходам модулей основного и резервного комплексов аппаратно-программного управления.
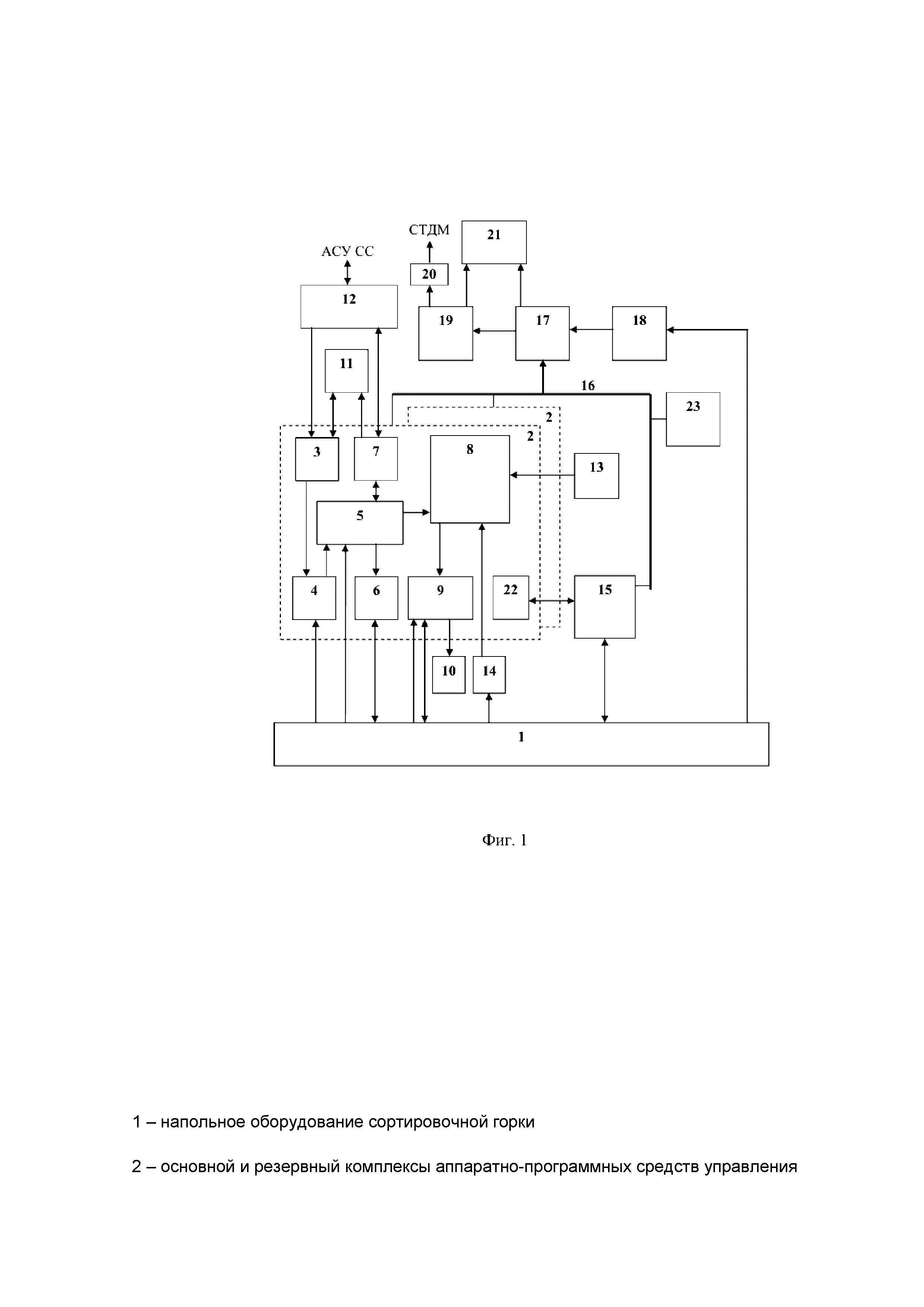
Сущность изобретения поясняется чертежом, на котором представлена структурная схема комплексной системы автоматизации управления сортировочным процессом на железнодорожном транспорте.
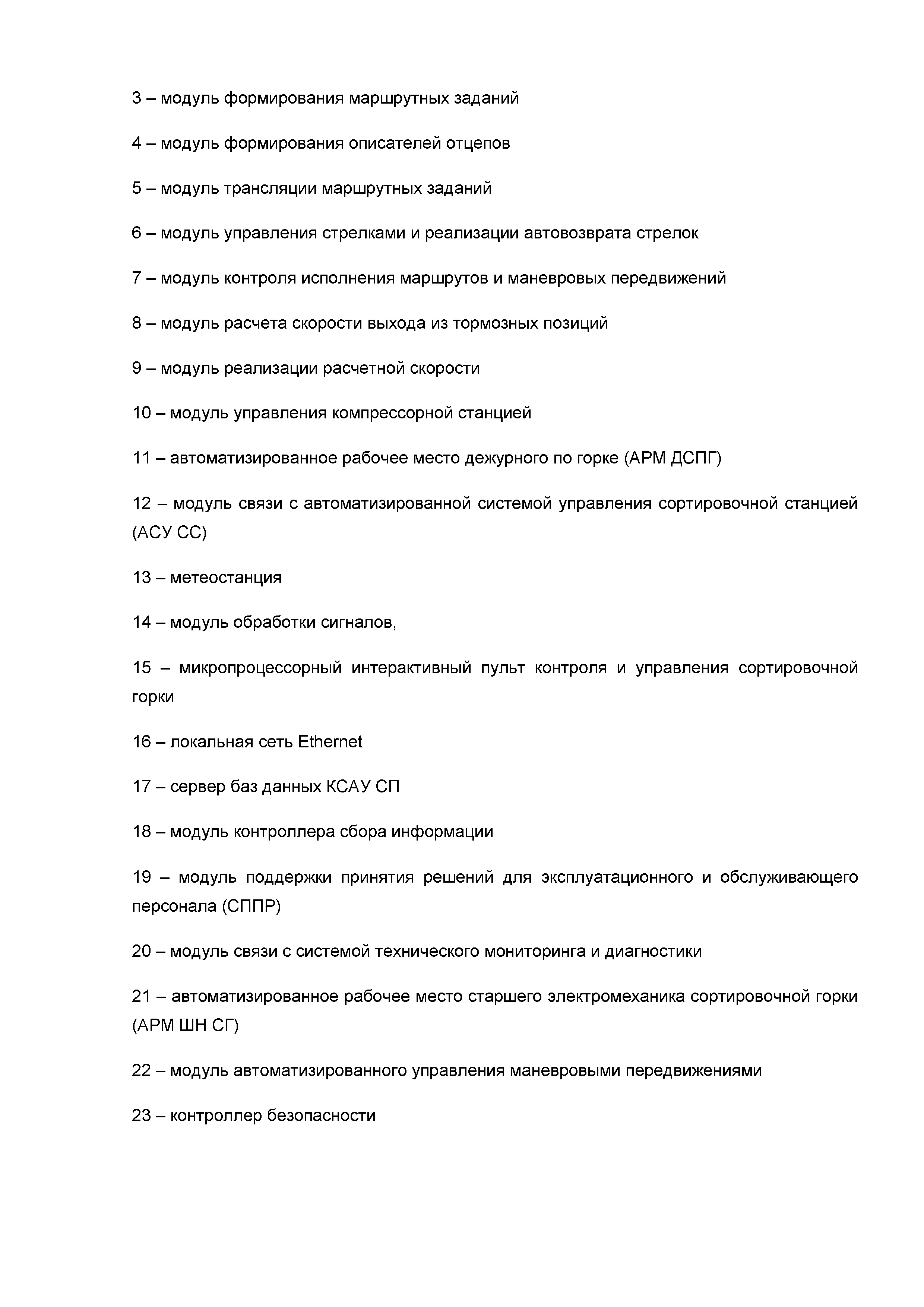
Комплексная система автоматизации управления сортировочным процессом на железнодорожном транспорте содержит взаимодействующий с устройствами контроля и исполнительными устройствами в составе напольного оборудования 1 сортировочной горки основной и резервный комплексы 2 аппаратно-программного управления, каждый из которых включает последовательно соединенные модуль 3 формирования маршрутных заданий, модуль 4 формирования описателей отцепов, модуль 5 трансляции маршрутных заданий и модуль 6 управления стрелками и реализации их автовозврата, модуль 7 контроля исполнения маршрутов и маневровых передвижений, последовательно соединенные модуль 8 расчета скорости выхода из тормозных позиций и модуль 9 реализации расчетной скорости, подключенный к выходам датчиков счета осей, расположенных в зоне замедлителей, и радиолокационных измерителей скорости, входами/выходами – к входам/выходам аппаратуры контроля и управлении замедлителей, а выходом к входу модуля 10 управления компрессорной станцией для оптимизации работы компрессорных установок, подающих сжатый воздух в пневмосистему замедлителей.
При этом модуль 3 формирования маршрутных заданий и модуль 7 контроля исполнения маршрутов и маневровых передвижений взаимодействуют с аппаратно-программным устройством автоматизированного рабочего места 11 дежурного по горке на посту управления, а через модуль 12 связи - с аппаратно-программным комплексом автоматизированной системы управления сортировочной станцией (АСУ СС).
Модуль 4 формирования описателей отцепов другими входами соединен с выходами датчиков счета осей и радиолокационным датчиком свободности на измерительном участке. Выходы и входы модуля 6 управления стрелками и реализации их автовозврата подключены к входам и выходам реле управления и реле контроля состояния стрелок.
Входы/выходы модуля 7 контроля исполнения маршрутов и маневровых передвижений подключены к выходам/входам модуля 5 трансляции маршрутных заданий. Модуль 5 другими входами соединен с выходами расположенных на спускной части сортировочной горки датчиков счета осей, с реле контроля состояния рельсовых цепей и положения стрелок.
Входы модуля 8 расчета скорости выхода из тормозных позиций подключены к соответствующему выходу модуля 5 и выходам метеостанции 13 и модуля 14 обработки сигналов, входами подключенного к выходам аппаратуры контроля заполнения путей.
Контрольные и исполнительные устройства напольного оборудования 1 подключены к микропроцессорному интерактивному пульту 15 контроля и управления сортировочной горки, расположенному на посту управления.
Информационные выходы модулей 3-9 основного и резервного комплексов 2 аппаратно-программного управления через сеть 16 Ethernet подключены к соответствующим входам пульта 15 и сервера 17, другой вход которого соединен с выходом контроллера 18 сбора информации, входом подключенного к выходам исполнительных горочных устройств.
Выход сервера 17 соединен с входом модуля 19 поддержки принятия решений для эксплуатационного и обслуживающего персонала, выходы которого подключены через модуль 20 связи к аппаратно-программному комплексу системы технического мониторинга и диагностики, а непосредственно - к входу аппаратно-программного устройства автоматизированного рабочего места 21 электромеханика сортировочной горки, другой вход которого подключен к другому выходу сервера 17.
Основной и резервный комплекс 2 аппаратно-программного управления включает также модуль 22 автоматизированного управления маневровыми передвижениями, вход/выход которого соединен с соответствующими выходом/входом микропроцессорного интерактивного пульта 15, а информационный выход - через сеть 16 Ethernet связан с сервером 17 баз данных.
Контроллер 23 безопасности входами/выходами по сети 16 Ethernet подключен к соответствующим входам/выходам модулей основного и резервного комплексов 2 аппаратно-программного управления.
Комплексная система автоматизации управления сортировочным процессом на железнодорожном транспорте функционирует следующим образом.
При получении сортировочного листка из АСУ СС модуль 12 на его основе формирует программу роспуска в автоматическом режиме или программа роспуска вводится дежурным по горке с клавиатуры аппаратно-программного устройства автоматизированного рабочего места 11 (маршрутный режим) и сохраняется в оперативной памяти модуля 3. По готовности программы роспуска дежурный по горке разрешает надвиг состава на горб сортировочной горки. При роспуске состава вагоны после прохода вершины горки поступают на измерительный участок, состоящий из четырех реверсивных датчиков счета осей, радиотехнического датчика свободности и весомера, по сигналам которого модуль 4 формирует описатель отцепа, содержащий информацию о количестве вагонов, количестве осей и межосных расстояниях в тележках вагонов отцепа, о маршрутном задании отцепу в соответствии с программой роспуска, полученном из модуля 3, поосном весе вагонов и особых признаков груза, и передает ее в модуль 5, который на основании сигналов от расположенных на спускной части сортировочной горки датчиков счета осей, реле контроля состояния рельсовых цепей и положения стрелок обеспечивает трансляцию маршрутных заданий на соответствующие стрелки и замедлители.
Модуль 6 осуществляет перевод стрелок по маршруту движения отцепов по спускной части горки. Информация из модуля 4 о маршрутном задании и количестве осей модулем 5 передается в зону оперативной памяти модуля 6, содержащую список очередных отцепов для ближайшей по ходу движения отцепа стрелки. Если стрелка свободна, модуль 6 выдает управляющий сигнал на перевод стрелки. При необходимости перевода стрелки для очередного отцепа в противоположное положение команда на перевод выдается блоком 6 при условии совпадения всех условий освобождения стрелки.
Освобождение стрелки фиксируется модулем 5 с учетом выполнения следующих условий: проследование всех осей отцепа по стрелочному датчику, освобождение рельсовой цепи стрелки, истечение временного интервала задержки до освобождения габарита, отсутствие осей очередного отцепа на стрелочном датчике.
После перевода стрелки в необходимое положение, информация о маршрутном задании и количестве осей отцепа поступает в конец списка очередных отцепов для следующей по ходу движения отцепа стрелки – и так вплоть до последней стрелки в маршруте движения отцепа. При освобождении стрелки очередь отцепов сдвигается так, что второй отцеп в очереди становится первым, третий вторым и так далее. Если в течение 1,2 сек. после выдачи команды на перевод стрелка не устанавливается в необходимое положение, модуль 6 реализует автовозврат стрелки при свободности стрелочного участка.
После прохождения отцепом последней стрелки, информация из модуля 5 поступает в модуль 7, в памяти которого формируется исполненная программа роспуска состава, которая передается в модуль 12 и отображается на экране дисплея аппаратно-программного устройства автоматизированного рабочего места 11.
При выполнении маневровых перестановок между роспусками дежурный по горке вводит начало и конец маневрового маршрута путем выбора начальной и конечной стрелок на экране микропроцессорного интерактивного пульта 15, откуда введенные данные передаются в модуль 22, который проверяет свободность путевых участков в составе маршрута и, в случае их свободности, формирует задание на перевод соответствующих стрелок, передает его в контроллер микропроцессорного интерактивного пульта 15, который переводит стрелки в заданное положение. Модуль 7 на основании данных о количестве и направлении движения осей по стрелочным датчикам, с учетом данных о накоплении вагонов на путях сортировочного парка, полученных из АСУ СС модулем 12, определяет состав маневровых групп, переставляемых в пределах горочной горловины сортировочного парка, отслеживает их с помощью блока 5 и автоматически формирует сообщения о маневровых перестановках и передает их через модуль 12 в АСУ СС.
Модуль 8 получает информацию о передвижении отцепов по спускной части сортировочной горки из модуля 5, сигналы от датчиков счета осей, радиолокационных измерителей скорости движения отцепов в зоне замедлителей, от модуля 14 о текущем размещении отцепов на путях сортировочного парка. Используя полученную информацию и сформированные модулем 4 описатели отцепа, а также данные от метеостанции 13, модуль 8 формирует расчетные скорости выхода отцепов из тормозных позиций, обеспечивающие необходимые интервалы времени для перевода стрелок и безопасное соединение с вагонами, находящимися на путях, с учетом погодных условий, которые передаются в модуль 9.
Модуль 9 на основании рассчитанной скорости выхода из тормозной позиции, полученной от модуля 8, показаний радиолокационных измерителей скорости, сигналов о проходе осей по датчикам, установленным на входе и выходе из замедлителя, формирует управляющие сигналы аппаратуре управления замедлителями, обеспечивая на выходе из тормозных позиций скорости отцепов, соответствующие расчетным.
Информация о режиме торможения и состоянии технологического процесса на сортировочной горке из модуля 9 передается в модуль 10 управления компрессорной станцией, который определяет оптимальный режим работы компрессорных установок, подающих сжатый воздух в пневмосистему замедлителей, и выдает соответствующие управляющие команды аппаратуре управления компрессорными установками.
Работа всех напольных устройств сортировочной горки в режиме реального времени фиксируется в оперативной памяти и отображается на экране микропроцессорного интерактивного пульта 15, расположенного на посту дежурного по горке. Оперативно-диспетчерский персонал имеет возможность управлять исполнительными устройствами сортировочной горки с помощью микропроцессорного интерактивного пульта 15, при этом исключается одновременная подача команд управления с модуля 6 управления стрелками и команд управления от оператора посредством контроллера микропроцессорного интерактивного пульта 15.
Контроллер 23 безопасности в непрерывном режиме контролирует работоспособность управляющих модулей 3-9, 22 в основном и резервном комплексах 2 с одинаковым составом модулей, находящихся в рабочем состоянии. В случае фиксации сбоя в работе одного из модулей 3-9, 22 основного комплекса контроллер 23 передает управление на резервный комплекс оборудования путем переключения на него каналов выдачи управляющих сигналов на исполнительные устройства.
Результаты работы всех программно-аппаратных модулей КСАУ СП фиксируются в памяти сервера 17 баз данных. Сервер 17 накапливает протокольную информацию о работе напольных устройств, собранную и обработанную контроллером 18 сбора информации, формирует протокол всех ручных вмешательств, зафиксированных микропроцессорным интерактивным пультом 15. Обработанная информация из сервера 17 передается на АРМ ШН СГ 21, где используется для целей диагностики.
Информация о работе системы и персонала передается из сервера 17 в модуль 19 поддержки принятия решений для эксплуатационного и обслуживающего персонала. Модуль 19 обрабатывает полученную информацию, фиксирует предотказные состояния напольных горочных устройств и выдает полученные результаты в АРМ ШН СГ 21. Модуль 19 передает результаты работы системы и анализа состояния устройств в модуль 20 связи с системой технического мониторинга и диагностики.
Таким образом, предлагаемая комплексная система автоматизации управления сортировочным процессом на железнодорожной станции обеспечивает повышение надежности и безопасности за счет «горячего резервирования» комплекса аппаратно-программного управления и повышение перерабатывающей способности сортировочной горки станции за счет автоматизации маневровых перестановок вагонов между роспусками.
Реферат
Изобретение относится к средствам автоматизации технологического процесса на сортировочной горке станции. Система содержит основной и резервный комплексы аппаратно-программного управления, взаимодействующие с устройствами контроля и исполнительными устройствами напольного оборудования сортировочной горки, предназначенные для расчета переменной скорости роспуска, контроля расцепа отцепов, управления маршрутами движения отцепов, контроля хода роспуска с контролем заполнения путей подгорочного парка, регулирования скоростей скатывания отцепов, учета накопления вагонов, оперативного управления, в том числе автоматизированного управления маршрутами движения групп вагонов с локомотивами на спускной части сортировочной горки при маневровых перестановках между роспусками, и отображения хода роспуска и обмена информацией с автоматизированной системой управления сортировочной станцией, также включает контроллер безопасности, обеспечивающий передачу управления от основного комплекса аппаратно-программного управления на резервный в случае сбоя в его работе, модуль автоматизированного управления маневровыми передвижениями, интерактивный микропроцессорный пульт, сервер баз данных, модуль управления компрессорной станцией, модуль поддержки принятия решений для эксплуатационного и обслуживающего персонала сортировочной горки, метеостанцию. Достигается повышение перерабатывающей способности сортировочной горки станции за счет автоматизации маневровых перестановок вагонов между роспусками. 1 ил.
Комментарии