Система для управления рабочим параметром уборочной жатки - RU2747303C2
Код документа: RU2747303C2
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к сельскохозяйственным уборочным машинам. Более конкретно, оно относится к управлению рабочими параметрами жатки уборочной машины.
УРОВЕНЬ ТЕХНИКИ
Сельскохозяйственные уборочные машины предназначены для уборки зерновых. У них есть жатки, предназначенные для скашивания или сбора зерновых с земли, которые впоследствии обрабатываются в кузове уборочной машины или размещаются непосредственно на земле. В случае комбайна, уборочная машина убирает зерновые, отделяет зерно от материала, иного чем зерно (MOG), очищает зерно и накапливает зерно в бункере для зерна. В итоге, они перемещают зерно из бункера для зерна в сопровождающее транспортное средство, такое как зерновозка или зерновой прицеп. В случае кормоуборочной машины, зерновая культура скашивается, разгоняется и забивается в контейнер транспортировочной машины, а в случае валкоукладчика, зерновая культура скашивается и размещается на поле в валке.
Несмотря на то, что многочисленные функции уборочной машины уже были автоматизированы в прошлом, подобные определению размера резки и настройке установки переработки зерна в кормоуборочной машине или настройке молотильного и очистного устройства в комбайне, автоматизация функций жатки все еще находится в процессе разработки. Фактически, оператору уборочной машины нужно сосредотачиваться на поле перед машиной и модифицировать некоторое количество рабочих параметров жатки вручную, что является обременительной задачей.
Типичная жатка комбайна для уборки мелкого зерна, подобного пшенице или ячменю, является так называемой платформой, которая содержит режущий аппарат, мотовило и поперечный конвейер. Режущий аппарат отрезает стебель зерновой культуры от корней, остающихся в земле, а поперечный конвейер, который может быть шнековым или ленточным конвейером, подает зерновую культуру поперечно в приемную камеру молотилки, которая, со своей стороны, подает ее внутрь зерноуборочного комбайна для молочения и дополнительной переработки. Мотовило расположено над режущим аппаратом и вращается, чтобы заправлять пальцы в зерновую культуру, для подачи зерновой культуры назад, так чтобы она скашивалась режущим аппаратом. Скошенная зерновая культура перемещается назад по меньшей мере одним из пальцев мотовила и убранной впоследствии зерновой культуры до тех пор, пока она не увлекается поперечным конвейером. Такая платформенная жатка также может использоваться на кормоуборочной машине для заготовления силоса из цельных зерновых растений и на валкоукладчике.
Было предложено некоторое количество автоматизаций рабочих параметров платформ, которые в прошлом должны были управляться вручную оператором уборочной машины. Например, положение жатки над землей и, таким образом, высота скашивания может управляться автоматически на основании датчиков некоторым образом, отслеживающим рельеф грунта или очертание зерновых культур (US 6,615,570 B2, DE 44 11 646 A1). Дополнительным рабочим параметром платформенной уборочной жатки, который должен управляться, является положение мотовила. Было предложено считывать положение верхушек зерновой культуры ультразвуковым датчиком (GB 2 173 309 A) или камерой (EP 2 681 984 A1) или комбинированным датчиком с радиолокатором (RADAR) и лазерным локатором (LIDAR) (EP 2 517 549 A1) и соответствующим образом настраивать положение мотовила по вертикали (EP 2 517 549 A1, также скорость мотовила и положение по горизонтали).
Автоматизация, упомянутая в предыдущем параграфе, может быть классифицирована в качестве системы с разомкнутым контуром, в которой номинальное значение рабочего параметра жатки определяется первым датчиком, а блок управления определяет номинальное значение параметра для исполнительного механизма, приспособленного оказывать влияние на рабочий параметр, и отправляет сигнал на исполнительный механизм. Сигнал управления определяется на основании разности между номинальным значением параметра и значением обратной связи со второго датчика, который непосредственно или опосредованно выдает сигнал для фактического значения рабочего параметра. Сигнал управления определяется некоторым образом, чтобы минимизировать разность между номинальным значением параметра и значением обратной связи. Такие системы (сравните с US 6,615,570 B2) требуют датчика обратной связи на борту жатки, например, для определения высоты жатки над землей или положения мотовила относительно жатки и/или датчика обратной связи на борту уборочной машины, для того чтобы определять положение части уборочной машины (в случае комбайна - приемной камеры молотилки), удерживающей жатку, относительно уборочной машины.
Для того чтобы обеспечивать надлежащее функционирование автоматики, нужно, чтобы блок управления знал зависимость между сигналом второго датчика и рабочим параметром. Например, если рабочим параметром является высота жатки над землей, и второй датчик определяет угол приемной камеры молотилки относительно уборочной машины, нужно, чтобы блок управления знал расстояние между поворотной опорой приемной камеры молотилки и жаткой и высоту поворотной опоры над землей. Уже этот простой случай обнаруживает некоторое количество возможных ошибок, подобных меняющимся размерам шин или установке более длинной приемной камеры молотилки. Это становится еще более проблематичным в случае определения положения мотовила, которое установлено подвижно в продольном направлении на рычагах мотовила, которые поворачиваются вокруг горизонтальных осей относительно жатки. Для того чтобы правильно определять горизонтальное и вертикальное положение мотовила, таким образом необходимо, чтобы рассматривались по меньшей мере три значения с датчиков, плюс многочисленные механические размеры жатки и уборочной машины, служащие причиной довольно большого количества возможных источников ошибок.
Еще один подход для автоматического управления функциями жатки состоит в том, чтобы использовать камеру, как правило установленную на уборочной машине, и систему обработки изображений для обнаружения и решения проблем и заторов подачи зерновой культуры (EP 2 143 316 A1, DE 10 2016 202 628 A1). Эта автоматизация может быть классифицирована в качестве системы с замкнутым контуром, поскольку датчик (камера) смотрит на результат работы жатки, а сигнал управления, отправляемый блоком управления на исполнительный механизм, основан как раз на результате работы. Однако, это имеет недостаток, что возможные проблемы, подобные перебросу пучков соломы мотовилом, не могут избегаться априори, а исправляются, только когда они возникают.
В заключение, DE 10 2014 209 371 A1 описывает устройство управления для сельскохозяйственной машины со стрелой-манипулятором. Времяпролетная камера определяет положение отражательных меток на стреле-манипуляторе и управляет стрелой-манипулятором, чтобы перемещалась над пологом зерновых культур или над землей, высота которых определяется той же самой камерой, на требуемой высоте. Применение к жаткам не очевидно.
Цель данного изобретения состоит в том, чтобы предоставить автоматическую систему управления жаткой с разомкнутым контуром, избегающую или по меньшей мере уменьшающую упомянутые проблемы.
Другие цели настоящего изобретения будут очевидны, когда описание изобретения читается совместно с прилагаемыми чертежами. Прилагаемые чертежи, приведенные в материалах настоящей заявки, являются всего лишь иллюстративными и не подразумеваются ограничивающими объем и границы настоящего изобретения.
Сущность изобретения
Система для управления рабочим параметром уборочной жатки сельскохозяйственной уборочной машины содержит первое измерительное устройство для считывания характеристики поля перед жаткой бесконтактным образом, второе измерительное устройство для выдачи сигнала, подходящего для вывода значения регулируемого рабочего параметра жатки, исполнительный механизм, приспособленный настраивать рабочий параметр, и блок управления для определения сигнала управления для исполнительного механизма на основании сигнала с первого измерительного устройства и сигнала со второго измерительного устройства. Второе измерительное устройство выполнено с возможностью определения положения контрольной точки, которое указывает рабочий параметр, бесконтактным образом. Первое измерительное устройство и второе измерительное устройство относительно неподвижны, то есть не перемещаются друг относительно друга во время работы.
Другими словами, система с разомкнутым контуром, как описанная выше, использует бесконтактное второе измерительное устройство (обратной связи), которое установлено вместе с и, таким образом, не перемещается относительно первого датчика. Оба измерительных устройства, таким образом, считывают и выдают свои сигналы относительно одной и той же системы отсчета, в которой они установлены, и, отсюда, избегается необходимость знания о возможном изменении механических параметров и/или значений дополнительных ошибок для вывода фактического значения рабочего параметра из значения со второго датчика, упрощая систему управления и избегая возможных ошибок. Обе измерительных системы, таким образом, считывают и выводят свои сигналы в пределах общей системы отсчета, то есть, используют одну и ту же систему координат для считывания и выдачи своих данных.
Первое измерительное устройство и второе измерительное устройство могут поддерживаться на уборочной машине или на жатке.
Блок управления может быть работоспособным для сохранения и обработки сигналов первого измерительного устройства и второго измерительного устройства в локальной системе отсчета жатки или уборочной машины для обработки и определения сигнала управления для исполнительного механизма. Также возможно, чтобы блок управления преобразовывал их в привязанную к земле систему координат, что обладает преимуществом, что эти значения могут дополняться значениями с датчиков, которые были собраны раньше с другой системы датчиков, например, на самодвижущемся аппарате.
Блок управления может быть выполнен с возможностью определения номинального значения рабочего параметра для исполнительного механизма на основании сигнала с первого измерительного устройства и определять сигнал управления некоторым образом, чтобы минимизировать разность между номинальным значением рабочего параметра и фактическим значением рабочего параметра, выведенным из сигнала второго измерительного устройства.
Рабочий параметр, регулируемый исполнительным механизмом и считываемый вторым измерительным устройством, может быть по меньшей мере одним из высоты жатки над землей, поперечного угла жатки, фронтального угла жатки, вертикального положения мотовила и горизонтального положения мотовила.
Первое измерительное устройство и второе измерительное устройство могут содержат совместно используемый датчик. В других вариантах осуществления, два отдельных датчика могут использоваться для первого измерительного устройства и второго измерительного устройства. В последнем случае, расстояние и относительная ориентация двух измерительных устройства могут калиброваться с использованием известных способов, например, посредством определения общего признака в поле зрения обоих измерительных устройств.
Первое и/или второе измерительное устройство может содержать камеру с системой обработки изображений либо лазерный или радиолокационный сканер, или камеру PMD, предпочтительно работающие в двух измерениях, таким образом выдавая трехмерное изображение.
Система обработки изображений, принимающая сигнал изображения с камеры или сканера, может быть, для обеспечения функционирования второго измерительного устройства, приспособлена считывать метки, установленные на элемент жатки, который подвижен посредством исполнительного механизма, и/или элемент, подвижный сам по себе, которым, например, может быть часть жатки, которая подвижна посредством исполнительного механизма, подобная мотовилу, перемещаемому исполнительным механизмом относительно жатки, или части рамы жатки, перемещаемой исполнительным механизмом относительно уборочной машины.
Характеристика поля, определяемая первым измерительным устройством, может быть по меньшей мере одним из высоты зерновой культуры и рельефа грунта.
Сельскохозяйственная уборочная машина может содержать шасси, средство зацепления грунта, поддерживающее шасси на земле, средство крепления для прилаживания уборочной платформы к шасси и систему, как описанная выше.
Уборочная машина может быть одним из комбайна, кормоуборочной машины и валкоукладчика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение далее будет описано применительно к прилагаемым чертежам, на которых:
фиг. 1 - схематический вид сбоку сельскохозяйственной уборочной машины;
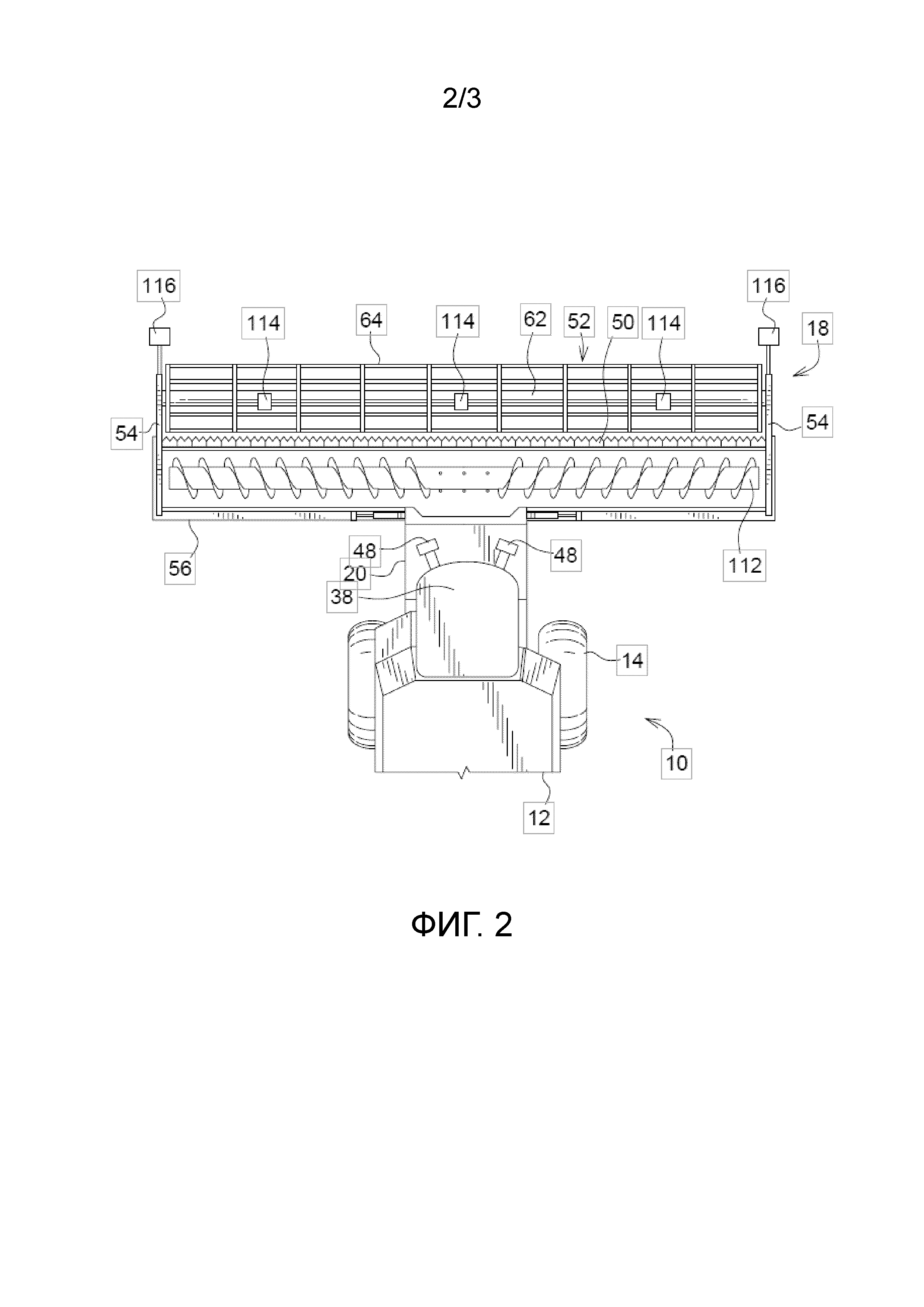
фиг. 2 - вид сверху уборочной машины по фиг. 1; и
фиг. 3 - принципиальная схема системы, управляющей рабочими параметрами функционирования платформы уборочной машины по фиг. 1 и 2.
Варианты осуществления в материалах настоящей заявки и различные признаки и их полезные детали пояснены со ссылкой на неограничивающие варианты осуществления в нижеследующем описании. Описания широко известных компонентов и технологий обработки не включены в состав, с тем чтобы излишне не затенять варианты осуществления в материалах настоящей заявки.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Уборочная машина
Фиг. 1 и 2 показывает самоходную уборочную машину 10 в виде комбайна, имеющую опорное шасси 12, которое поддерживается на приводных передних колесах 14 и управляемых рулем задних колесах 16 на земле и перемещается на колесах 14, 16 вперед. Колеса 14, 16 приводятся во вращательное движение средством привода (не показано), для того чтобы перемещать уборочную машину 10 по полю, которое должно быть убрано. В нижеследующем, упоминания направлений, подобные переднему или заднему, указывают ссылкой на переднее направление V уборочной машины 10, которое направлено влево на фиг. 1.
На участке с передней стороны уборочной машины 10, с возможностью снятия установлена уборочная жатка в виде уборочной платформы 18, для того чтобы убирать зерновую культуру 76 в виде зерна или других пригодных для обмолота стеблевых плодов с поля и перемещать ее вверх и назад через узел 20 приемной камеры молотилки в осевой молотильный агрегат 22 во время операции уборки. Смесь зерна и другого материала, которая проникает через подбарабанье молотилки и разделительные решетки осевого молотильного агрегата 22, достигает очистительного устройства 26. Зерно, очищенное очистительным устройством 26, перемещается зерновым шнеком 28 в зерновой элеватор 30, подающий его в бункер 32 для зерна. Очищенное зерно в бункере 32 для зерна может выгружаться системой выгрузки, содержащей поперечный шнек 34 и конвейер 36 разгрузчика, выполненный в виде шнекового узла. Остатки зерновой культуры, вытолкнутые осевым молотильным агрегатом 22, подаются посредством цепа 40 в соломорезку 42, которая рубит и разбрасывает их на ширине платформы по полю. Упомянутые системы приводятся в движение двигателем внутреннего сгорания и управляются оператором из кабины 38 оператора. Показанный осевой молотильный агрегат 22 с одним или более осевых молотильных и разделительных роторов является всего лишь примерным вариантом осуществления и мог бы быть заменен тангенциальным молотильным устройством с одним или более молотильных барабанов и последующими соломотрясами или разделительными роторами.
Платформа
Платформа 18 содержит возвратно-поступательный режущий аппарат 50, как правило продолжающийся по всей ширине платформы 18. Режущий аппарат 50 может быть жестким или гибким, как известно в данной области техники. Мотовило 52 расположено на платформе 18 и также как правило продолжается по всей ширине платформы 18 (или ее части). Наружные торцы мотовила 50 поддерживаются на рычагах 54, из которых только один показан на фиг. 1. Рычаги 54 имеют задние концы, которые поддерживаются на осях, продолжающихся поперек переднего направления «V» на раме 56 платформы 18, какая рама 56 также продолжается по ширине платформы 18, и удлиняются от нее вперед. Каждый рычаг 54 присоединен к исполнительному механизму 58 в виде гидравлического цилиндра, который поворотно поддерживается на раме 56 и на рычаге 54. Рычаги 54 и, таким образом, мотовило 52 поднимаются и опускаются посредством настройки (втягивания и выдвигания) исполнительного механизма 58.
На центральной трубе 62, которая может приводиться в поворотное движение (во время операции уборки, в смысле против часовой стрелки на фиг. 1) управляемым приводом 110, поддерживаются зубчатые транспортеры 64, также продолжающиеся по ширине платформы 18 (или ее части), на которых установлены пальцы 66 зубчатого транспортера 64. Второй исполнительный механизм 68 в виде гидравлического цилиндра приспособлен для горизонтальной настройки мотовила 52 посредством перемещения опорного подшипника трубы 62 вдоль рычага 54. Платформа 18 также содержит поперечный конвейер 112, который может быть выполнен в виде шнека (как показано) или конвейерных лент, для того чтобы подавать зерновую культуру режущим аппаратом 50 в центр платформы 18 и подавать ее в приемную камеру 20 молотилки через задний проем в раме 56.
Высота платформы 18 над землей определяется третьим исполнительным механизмом 70, управляемым посредством электронного блока 46 на основании входного сигнала из устройства 44 пользовательского ввода и/или автоматического управления, электронный блок 46 управления приспосабливает высоту платформы под профиль грунта, удерживает высоту платформы на требуемой высоте над землей или направляет ее с требуемым давлением на землю, которое поворачивает приемную камеру 20 молотилки и, таким образом платформу 18, которая подвижно установлена на ней, вокруг горизонтальной оси 72, продолжающейся поперечно к переднему направлению относительно шасси 12 уборочной машины 10. Как известно в данной области техники, платформа 18 может поворачиваться вокруг горизонтальной продолжающейся вперед оси (поперечный наклон), чтобы отслеживать профиль грунта, обычно перемещаемая еще одним исполнительным механизмом (не показан), управляемым электронным блоком 46 управления.
Функционирование платформы
В современном уровне техники, настройка высоты мотовила 52 выполняется оператором, который снабжен устройством 44 пользовательского ввода с кнопками в своей кабине 38. Устройство 44 пользовательского ввода присоединено к электронному блоку 46 управления, который, со своей стороны, управляет исполнительным механизмом 58. Если оператор нажимает верхнюю кнопку устройства 44 пользовательского ввода, мотовило 52 поднимается наряду с тем, что оно опускается, пока оператор нажимает нижнюю кнопку устройства 44 пользовательского ввода. Во время уборки стоячей зерновой культуры 76, оператор будет позиционировать мотовило 52 в горизонтальном направлении (посредством дополнительных кнопок устройства 44 пользовательского ввода, которые управляют вторым исполнительным механизмом 58 через электронный блок 46 управления) с небольшим пространством перед режущим аппаратом 50 платформы 18.
Вертикальная высота мотовила 52 нормально настраивается оператором некоторым образом, так чтобы пальцы 66 мотовила 52 захватывали стебли стоячей зерновой культуры 76 чуть ниже колосьев. Если мотовило 52 настроено слишком высоко, зерновая культура 76 может накапливаться на режущем аппарате 50. При правильной высоте мотовила, режущий аппарат 50 может скашивать зерновую культуру 76 без проблем, и стебли растений падают колосьями перед поперечным конвейером 112. Переднее положение мотовила 52 зависит от соответственной урожайности, то есть, мотовило 52 при высоких выработках перемещается дальше вперед, и наоборот. При уборке полегшей зерновой культуры, нужно, чтобы мотовило вертикально, а в трудных условиях также и горизонтально, находилось ближе к режущему аппарату 50, для того чтобы подавать растения в направлении режущего аппарата 50 и, впоследствии, на поперечный конвейер 112. В случае если полегшую зерновую культуру необходимо убирать только на части ширины платформы 18, в то время как стоячая зерновая культура поступает на оставшейся ширине, сильно низкое положение мотовила приводит к плохому движению зерновой культуры и к потерям хлеба на корню. В этом случае, промежуточное положение используется для того, чтобы собирать полегшую зерновую культуру так же, как и стоячие стебли, приемлемым образом.
Горизонтальное положение режущего аппарата 50 относительно рамы 56 платформы 18 является регулируемым исполнительным механизмом 102, который управляется с помощью устройства 44 пользовательского ввода и электронного блока 46 управления. Возможные варианты осуществления платформы с подвижным режущим аппаратом показаны в EP 2 803 257 A1 и WO 03/049532 A1, содержание которых включено в материалы настоящей заявки посредством ссылки. Эта настройка предоставляет возможность настраивать длину отрезного стола под конкретный тип зерновой культуры и, если уместно, под направление полегшей зерновой культуры.
В варианте осуществления, показанном на фиг. 1 и 2, платформа 18 может перемещаться дополнительным исполнительным механизмом 98 (управляемым с помощью устройства 44 пользовательского ввода и электронного блока 46 управления) вокруг горизонтальной оси 100, продолжающейся поперечно по отношению к переднему направлению V, которое совпадает с нижним роликом приемной камеры молотилки.
Таким образом, очевидно, что непрерывное ручное приспосабливание положения мотовила и/или длины отрезного стола к реальным условиям жатвы является задачей, утомляющей оператора, которая не позднее, чем через несколько часов, больше не выполняется оптимальным образом, приводя к неоптимальным результатам уборки урожая.
Кроме того, системы предшествующего уровня техники для управления положением мотовила и/или высотой скашивания (то есть вертикальным положением жатки 18, ее боковым наклоном и наклоном вперед) на основании прогнозно-определенной высоты зерновой культуры, считанной первым датчиком, установленным на борту уборочной машины 10, требуют второго датчика (обратной связи), выдающего сигналы, которые также зависят от фактического положения исполнительных механизмов, влияющих на положение мотовила и платформы, и от механических размеров платформы 18, которые необходимо вводить в систему управления, и, таким образом, не всегда точны.
Автоматическая настройка мотовила
Для того чтобы облегчить работу оператора и освободить его или ее от непрерывной настройки положения мотовила 52, уборочная машина 10 оснащена системой для автоматической настройки рабочих параметров мотовила 52, схематически показанной на фиг. 3. Система содержит датчик 48, выполненный в виде одной или двух или более монокулярных или стереоскопических камер с системой 74 обработки изображений. Согласно фиг. 2, две стереоскопических камеры 48 с объективами, размещенными рядом или друг над другом, установлены на передней кромке крыши кабины 38 и смотрят влево и вправо, соответственно, чтобы наблюдать за всей шириной платформы 18 и полем перед ней. Камеры 48, таким образом, смотрят на стоячую (или возможно полегшую) популяцию зерновой культуры 76 перед платформой 18. Изображения с обеих камер 48 могут сшиваться воедино по центру. Система 74 обработки изображений предварительно анализирует сигналы изображения камеры 48 и выводит, во время эксплуатации, сигналы 78, содержащие в себе информацию о высоте верхней поверхности зерновой культуры 76 над землей.
Дополнительно, скорость вращения мотовила 52, определенная управляемым приводом 110, может управляться вручную или автоматически, среди прочего, на основании сигнала с камер(ы) 48.
Сигналы датчика 48 представляются на рассмотрение в блок 86 обработки сигналов, который является частью электронного блока 64 управления и рассчитывает высоту верхней поверхности зерновой культуры 76 над землей на основании сигналов 78 датчика 48, и представляет эту высоту на рассмотрение в качестве первого выходного сигнала 88 в электронный блок 90 управления. Блок 86 обработки сигналов может содержать фильтр нижних частот, для того чтобы уменьшать шум в выходном сигнале 88. Этот сигнал 88 используется для управления положением и, по выбору, скоростью мотовила таким образом, чтобы положение и скорость мотовила 52 устанавливались в надлежащие значения, когда мотовило 52 взаимодействует с хлебной культурой 76 в положении, в котором датчик 48 вырабатывал сигнал 88. Здесь, профиль грунта может учитываться в алгоритме управления, чтобы принимать во внимание влияние неплоского грунта в прямом и/или боковом направлении на мотовило, а также на управление высотой жатки, то есть посредством оценки формы профиля грунта на участке перед машиной или загрузки ее с предварительной карты, оценки мгновенного трехмерного преобразования между системой отсчета уборочной машины и системой отсчета, представляющей землю, что дает возможность выражения положения зерновой культуры относительно неподвижной системы отсчета земли, в противоположность динамической системе отсчета транспортного средства, и управления положением мотовила относительно системы отсчета транспортного средства, как в целом описано в EP 0 845 198 A1, EP 0 970 595 A1, US 6 615 570 B2, WO 2008/088916 A2 и EP 2 959 318 A1.
Электронный блок 90 управления также принимает второй выходной сигнал 94 из блока 86 обработки сигналов, представляющий собой фактическое положение мотовила 52 (то есть, конкретной контрольной точки мотовила 52, которой, например, может быть нижний конец пальца 66, который фактически находится в своем самом переднем положении, подобно пальцу 66 на фиг. 1 или оси центральной трубы 62). Этот второй выходной сигнал 94 оценивается на основании сигнала изображения, выдаваемого камерой 48, и пользуется метками 114, установленными на центральной трубе 62 мотовила 52, для определения положения мотовила, извлекая данные касательно положения меток 114 из сигнала 78 изображения, предоставленного камерой 48. Метки 114 могут иметь подходящий цвет, нормально не обнаруживаемый в изображении камеры 48, например, подобный синему, и/или быть отражательной. В качестве альтернативы или дополнительно, положение мотовила 52 может идентифицироваться непосредственно в данных изображения.
Второй выходной сигнал 94 является замещающим или дополняющим датчики обратной связи, известные в данной области техники (в частности сравните заявку 62/535043 на выдачу патента США от 20 июля 2017 года, содержание которой включено в материалы настоящей заявки посредством ссылки), для определения фактического положения мотовила.
Выходные сигналы 88 и 94 подаются в электронный блок 90 управления, который также принимает сигналы из блока 44 операторского ввода через формирователь 96 сигнала и выдает, через блок 92 управления, сигналы управления на исполнительные механизмы 58 и 68. Камера 48, таким образом, одновременно составляет первое измерительное устройство для считывания характеристики (высоты зерновой культуры) поля перед платформенной жаткой и второе измерительное устройство для выдачи сигнала, пригодного для вывода значения регулируемого рабочего параметра (вертикального и горизонтального положения контрольной точки мотовила 52) платформенной жатки и управляет исполнительным механизмом 58, 68 для настройки рабочего параметра, в силу чего, электронный блок 90 управления определяет сигнал управления для исполнительного механизма 58, 68 на основании сигнала из первого измерительного устройства и на основании сигнала из второго измерительного устройства. Второе измерительное устройство поддерживается на уборочной машине 10 и выполнено с возможностью определять рабочий параметр бесконтактным образом. Электронный блок 90 обработки электронного блока 46 управления выполнен с возможностью определения номинального значения рабочего параметра для исполнительного механизма 58, 68 (то есть, подходящее вертикальное и горизонтальное положение контрольной точки мотовила 52 для фактической высоты зерновой культуры) на основании сигнала из первого измерительного устройства и определения сигнала управления таким образом, чтобы минимизировать разность между номинальным значением рабочего параметра и фактическим значением рабочего параметра (то есть, считанным вертикальным и горизонтальным положением контрольной точки мотовила 52), выведенным из сигнала второго измерительного устройства. Поскольку оба измерительных устройства неподвижны друг относительно друга, усложненное и подверженное ошибкам преобразование координат не требуется.
Электронный блок 46 управления может использовать локальную систему координат уборочной машины 10 в качестве своей системы отсчета, то есть использовать подходящую точку уборочной машины 10 (например, местоположение камеры 48) или центр передней кромки крыши кабины или на жатке 18 в качестве контрольной точки для определения всех других расположений и направлений расположений считанных и/или управляемых значений (подобных точке полога зерновых культур или мотовила). К тому же, было бы возможно, чтобы электронный блок управления привязывал все положения, необходимые для автоматического управления жаткой (широту, долготу и, если требуется, возвышение, угол поперечного наклона, угол продольного наклона и угол рыскания) в глобальной (привязанной к земле) системе координат, пользуясь приемником определения положения (не показан) на уборочной машине 10. Это может быть особенно полезно, если некоторые характеристики поля определены до того, как уборочная операция началась или достигла конкретного положения на поле, например, с использованием самодвижущегося аппарата.
Согласно предпочтительному варианту осуществления, сигналы, принятые из блока 44 операторского ввода, используются только для действия вопреки регулировкам исполнительных механизмов, которые настроены автоматически на основании сигналов с датчика 48.
Подробности о том, каким образом положение мотовила и длина стола (находящиеся под влиянием исполнительного механизма 102) и передний наклон стола (исполнительный механизм 98) могут настраиваться на основании высоты зерновой культуры и, возможно, выявленной полегшей зерновой культуры, раскрыты в заявке 62/535043 на выдачу патента США, датированной 20 июля 2017 года, содержание которой таким образом включено в материалы настоящей заявки посредством ссылки.
Управление с обратной связью для переброса мотовила
Следует отметить, что сигналы камеры 48 также могут использоваться для определения возможного переброса пучков соломы мотовилом 52. Это в частности может делаться во фрагментах изображения с камеры, показывающего центральную трубу 62 мотовила 52, поскольку центральная труба 62 нормально черного цвета и, таким образом, возможные солома или другие частицы зерновой культуры могут быть легко видны, как только они появляются перед центральной трубой 62. В случае, если мотовило 52 перебрасывает зерновую культуру, мотовило 52 может автоматически подниматься блоком 46 управления.
Управление высотой жатки
Дополнительные метки 116 над передним краем боковых стенок жатки 18 могут использоваться для определения фактического переднего положения режущего аппарата 50 (настроенного исполнительным механизмом 102) и для определения переднего угла стола (настроенного исполнительным механизмом 98) посредством камеры 48, системы 74 обработки изображений и блока 86 обработки сигналов, как описано выше со ссылкой на метки 114.
Высота жатки 18 и, по выбору, ее боковой наклон также могут управляться электронным блоком 46 управления. Сигнал изображения камеры 48 используется для определения фактической высоты зерновой культуры (или профиля грунта) и для определения, на основании меток 116, высоты платформы 18. Исполнительный механизм 70 (и, по выбору, еще один исполнительный механизм, настраивающий поперечный наклон жатки) управляется для перемещения контрольной точки платформы 18 на требуемую высоту ниже верхушек зерновой культуры или выше земли, как описано выше для управления мотовилом. Исполнительный механизм 98 может использоваться для удерживания платформы 18 параллельно земле.
Подробности обработки изображений с камеры
В нижеследующем, обсуждены некоторые возможные варианты осуществления касательно считывания положения мотовила и/или жатки.
1) Стереоскопическое считывание с метками.
Система, использующая одну или более меток 114 и/или 116 и одну или более стереоскопических камер 48, может работать несколькими способами:
a) Метка 114 и/или 116 может идентифицироваться как в левом, так и в правом изображениях, и основанный на признаках стереоскопический подход может использоваться для реконструкции местоположения меток в трех измерениях относительно левого или правого объектива стереоскопических камер 48.
b) Стереоскопическая реконструкция может выполняться над большим участком изображения, формируя плотную сетку трехмерных реконструированных точек. Метка 114 и/или 116 определяется в одном из стереоскопических изображений, и расположения трехмерных точек на участке изображения, соответствующем метке, агрегируются в уникальное трехмерное расположение для метки относительно левого или правого объектива стереоскопической камеры.
Как только местоположение метки 114 и/или 116 относительно стереоскопической камеры 48 оценено, предварительно калиброванное известное трехмерное преобразование между системами отсчета датчика и транспортного средства используется для отображения местоположения метки в системе отсчета транспортного средства. В этой системе отсчета транспортного средства, может быть без труда получено положение метки 114 и/или 116 (а отсюда, мотовила 52 и/или жатки 18) в продольном направлении и направлении высоты. Наличие в распоряжении многочисленных меток 114 и/или 116 может улучшить ошибкоустойчивость системы, предоставляя ей возможность работать, даже когда одна из меток 114 и/или 116 не поддается обнаружению вследствие преград, условий освещения, пыли и других причин.
2) Стереоскопическое считывание с моделью мотовила
Еще одним подходом было бы стереоскопическое считывание с моделью мотовила. Подход, используемый в этом случае, аналогичен описанному ранее, но устраняется требование, чтобы одна или более меток 114 и/или 116 были прикреплены к мотовилу 52 или жатке 18. Взамен, можно предположить, что приближенная трехмерная модель мотовила 52 и/или жатки 18 имеется в распоряжении из модели САПР (системы автоматизированного проектирования, CAD) или из существовавшей ранее трехмерной сканограммы мотовила и/или жатки. Можно опираться на эту существующую ранее трехмерную модель в качестве «трехмерным образца мотовила». Во время эксплуатации системы, плотное облако точек, полученное со стереоскопической камеры 48, может сопоставляться с трехмерным образцом мотовила, и наилучшее выравнивание этих двух дает в результате оценку положения объекта, описанного трехмерным образом (в нашем случае, мотовила 52 или жатки 18) в трехмерном облаке точек. Пример того, каким образом может работать эта технология, описан в http://www.pointclouds.org/documentation/tutorials/template_alignment.php#template-alignment. Должно быть упомянуто, что модель мотовила не должна быть полной моделью САПР. Также можно было бы описать конструкцию мотовила более простым способом, например, описывая, что она в целом состоит из более толстого центрального цилиндра, главным образом параллельного земле, окруженного более тонкими рейками (планками мотовила) с перпендикулярными «пальцами». Ожидается, что вычислительные затраты, требуемые для определения местоположения мотовила в трехмерном облаке точек с трехмерной моделью вместо использования меток, значительно более высоки.
3) Монокулярная камера с меткой
Еще один подход состоял бы в том, чтобы использовать монокулярную камеру 48 с меткой(ами) 114 и/или 116. Привлекательная альтернатива использованию одной или более стереоскопических камер для непосредственной оценки положения мотовила состоит в том, чтобы попробовать делать это, пользуясь одной или более монокулярных камер, не в стереоскопической конфигурации. Ключевое наблюдение состоит в том, что, в зависимости от положения и ориентации установки камер, физическое двухмерное движение центра мотовила в плоскости, перпендикулярной длине мотовила, может отражаться траекторией движения мотовила (или точки на мотовиле, такой как метка) в плоскости двухмерного изображения монокулярной камеры. Если это отображение из пространства физического движения (то есть, движения мотовила вперед-назад и вверх-вниз) в движение метки на мотовиле не имеет потерь (то есть, оно может быть приближенно выражено отображением один в один), то может использоваться отображение в обратную сторону, так чтобы расположение метки в координатах изображения может быть соотнесено с физическим положением мотовила относительно транспортного средства. Есть несколько способов для моделирования этого двухмерного в двухмерное отображения, некоторые из которых описаны ниже. Предполагается, что входные данные, используемые для вывода отображений, должны включать в себя набор синхронизированных пар расположений метки в изображении (строки изображения, столбца изображения) и расположений мотовила в физическом пространстве (по высоте и продольно в системе отсчета транспортного средства), например, полученных посредством установки линейных потенциометров на мотовиле или использования оптических визиров, видимых сбоку от мотовила.
a) На базе LUT (LUT=справочная таблица)
В этом случае, отображение между физическим движением мотовила и координатами в изображении записано в виде простой LUT. Как только сформирована, LUT может использоваться во время эксплуатации системы при поиске координат метки мотовила в текущем изображении и отыскивании соответствующего физического положения мотовила в той же самой строке LUT.
b) Основанная на обучении регрессия (например, нейронная сеть, дерево решений, и т. д.)
В этом случае, отображение может фиксироваться посредством обучения основанного на машинном обучении алгоритма регрессии, начиная с входных данных, аналогичных LUT, описанной выше. Преимущество основанной на обучении регрессионной системы состоит в том, что, на основании деталей реализации, она могла бы давать в результате меньший объем требуемой памяти, чем подход с LUT.
c) На основе гомографии
Может быть показано, что математически зависимость между физическим движением в двух измерениях метки, прикрепленной к мотовилу, и соответствующими двухмерными координатами метки в плоскости двухмерного изображения может описываться посредством гомографии (см. https://en.wikipedia.org/wiki/Homography_(computer_vision)) до тех пор, пока нелинейное искажение изображения незначительно, или изображения не искажены перед обработкой. В этом случае, можно использовать простую линейную модель для оценки отображения между физическим движением мотовила и движением метки в пространстве изображений.
4) Монокулярная камера с моделью мотовила: идентификация механических элементов мотовила
Вместо использования метки, установленной на мотовиле, потенциально также можно использовать подход с обработкой изображений (например, сравнение с образцами или другие стандартные технологии распознавания изображений) для идентификации конкретного механического элемента мотовила, например, планки мотовила.
Еще один подход, основанный на монокулярных изображениях и модели мотовила состоит в нахождении наилучшего выравнивания между известной трехмерной моделью и изображением (то есть, нахождении трехмерного преобразования между трехмерной моделью и системой отсчета транспортного средства, которое дает в результате наилучшее выравнивание с захваченным изображением). Пример того, каким образом работает эта технология, показан здесь: https://www.di.ens.fr/willow/research/seeing3Dchairs/.
5) Другой датчик с трехмерными возможностями (лазерный локатор, радиолокатор, времяпролетная камера, и т. д.)
Вместо использования трехмерной стереоскопической камеры для формирования трехмерного облака точек, которое заключает в себе мотовило (для того чтобы выравнивать его с трехмерной моделью мотовила), также можно использовать трехмерный лазерный сканер, трехмерный радиолокатор высокого разрешения, времяпролетную (TOF) камеру, структурированный источник света или любое другое трехмерное считывающее устройство, которое может формировать трехмерное облако точек, заключающее в себе размеры на мотовиле.
6) Лазер/радиолокатор с возможностями двухмерной нарезки
Двухмерный лазерный дальномер или двухмерный радиолокатор с высоким разрешением также мог бы использоваться для сканирования мотовила в плоскости, которая пересекает линейную конструкцию мотовила. Как результат, можно было бы обрабатывать данные дальности из двухмерного лазера или радиолокатора (посредством сравнения с образцами или других технологий), для того чтобы оценивать расположение мотовила на двухмерной сканограмме. При условии, что лазерный дальномер или радиолокатор установлен в известном положении на транспортном средстве (точно так же, как это происходило бы для трехмерной стереоскопической камеры), можно отображать выделенное расположение мотовила на двухмерной сканограмме в положение мотовила, выраженное относительно системы координат OVEHICLE, привязанной к транспортному средству.
7) Решения без формирования изображений
Бесконтактные датчики, подобные ультразвуковым измерителям дальности, установленные для считывания расстояния непосредственно между мотовилом и рамой или кабиной машины, могли бы заменить потенциометрические сборки/датчики внутри исполнительных механизмов, используемых в данной области техники. Этот подход легче работал бы для жаток с конструкцией с разделенным мотовилом, поскольку бесконтактный датчик может взаимодействовать с центральным механизмом удерживания мотовила.
Модификации
Следует отметить, что может быть произведен ряд модификаций в отношении описанного варианта осуществления. Уборочная машина 10, вместо комбайна, может быть самоходным или на автономным тяге валкоукладчиком или кормоуборочной машиной. Датчик 48 не обязательно должен смотреть (исключительно) вперед относительно уборочной машины 10, но дополнительно мог бы смотреть в сторону от уборочной машины 10 и собирать описанные данные уже в то время, как уборка проходит по полю, прилегающему к считываемому участку. Также было бы можно устанавливать датчик 48 на самодвижущемся аппарате или БПЛА (беспилотном летательном аппарате, UAV) и давать ему возможность пролететь над полем перед уборкой, и иметь второй датчик 48 на уборочной машине 10 для определения (исключительно или в дополнение к характеристиким поля) фактического положения мотовила и/или жатки. В этих вариантах осуществления, полезно опираться на сигналы первого измерительного устройства, состоящего из датчика на уборочной машине или на БПЛА, в глобальной системе отсчета. Они могут быть преобразованы в локальную систему отсчета уборочной машины 10 для управления исполнительным механизмом 58, 68, 98, 102, 70 описанным выше образом, или сигналы камеры 48, дающей значение обратной связи второго измерительного устройства, преобразуются в глобальную систему отсчета.
Вместо монокулярной или стереоскопической камеры, камера 48 может быть любой разновидностью трехмерного датчика, такой как лазер, радиолокатор или времяпролетная камера, как упомянуто выше.
ТЕХНИЧЕСКОЕ УСОВЕРШЕНСТВОВАНИЕ
Настоящее изобретение имеет несколько технических улучшений, в том числе, но не ограничиваясь, реализацию:
• простого механизма для удовлетворения требованиям установки сельскохозяйственных орудий с широким многообразием ширины на трактор; и
• устройства установки сельскохозяйственных орудий, которое без труда управляемо оператором с сиденья трактора.
Несмотря на то, что вышеизложенное описание изобретения было описано в отношении по меньшей мере одного варианта осуществления, настоящее изобретение может быть дополнительно модифицировано в рамках сущности и объема данного изобретения. Поэтому, подразумевается, что данная заявка охватывает любые изменения, применения или адаптации изобретения с использованием его общих принципов. Кроме того, подразумевается, что данная заявка охватывает те отклонения от настоящего изобретения, которые подпадают под известную или обычную практику в области техники, к которой относится настоящее изобретение.
Реферат
Сельскохозяйственная уборочная машина (10) содержит первое измерительное устройство для считывания характеристики поля перед жаткой (18) бесконтактным образом, второе измерительное устройство для выдачи сигнала, подходящего для вывода значения регулируемого рабочего параметра жатки (18), исполнительный механизм (58, 68, 98, 102, 70) для настройки рабочего параметра и блок (46) управления для определения сигнала управления для исполнительного механизма (58, 68, 98, 102, 70) на основании сигнала с первого измерительного устройства и сигнала со второго измерительного устройства. Второе измерительное устройство выполнено с возможностью определения положения контрольной точки, которое указывает рабочий параметр, бесконтактным образом. Первое измерительное устройство и второе измерительное устройство относительно неподвижны и содержат совместно используемый датчик. Изобретение обеспечивает упрощение управления рабочими параметрами уборочной машины. 7 з.п. ф-лы, 3 ил.
Комментарии