Устройство управления троганием с места и способ управления троганием с места - RU2664028C1
Код документа: RU2664028C1
Чертежи


Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления троганием с места и способу управления троганием с места для трогания с места рассматриваемого транспортного средства следом за находящимся впереди транспортным средством, которое остановилось впереди рассматриваемого транспортного средства.
Уровень техники
[0002] Патентный документ 1 раскрывает традиционное устройство управления движением со следованием, которое задает находящееся впереди транспортное средство, за которым рассматриваемое транспортное средство должно следовать, и выполняет управление движением со следованием. В устройстве управления движением со следованием, раскрытом в патентном документе 1, если запрос трогания с места водителем сохраняется, в то время как транспортное средство остановлено в состоянии ожидания сигнала или на перегруженной дороге, управление движением со следованием инициируется, когда обнаруживается трогание с места находящегося впереди транспортного средства. С другой стороны, если трогание с места находящегося впереди транспортного средства не обнаруживается в течение предварительно определенного времени, после того как запрос трогания с места сохраняется, сохраненный запрос трогания с места стирается.
Документы уровня техники
Патентные документы
[0003] Патентный документ 1: Японский патент № 4230385
Сущность изобретения
Задача, решаемая изобретением
[0004] Однако, в традиционном устройстве управления движением со следованием, описанном выше, число раз, которое водитель выполняет запрос трогания с места, пока транспортное средство остановлено, не учитывается. Следовательно, существует проблема в том, что, если находящееся впереди транспортное средство не трогается с места своевременным образом, водителю необходимо выполнять запрос трогания с места множество раз для того, чтобы возобновлять следование за находящимся впереди транспортным средством, что причиняет неудобства водителю.
[0005] Следовательно, принимая во внимание обстоятельства, описанные выше, целью настоящего изобретения является предоставление устройства управления троганием с места и способом для этого, чтобы предотвращать причинение неудобства водителю, принимая во внимание историю водительских запросов трогания с места.
Средство достижения цели
[0006] Для того, чтобы достигать цели, описанной выше, устройство управления троганием с места и способ согласно одному варианту осуществления настоящего изобретения обнаруживает находящееся впереди транспортное средство, которое остановилось впереди рассматриваемого транспортного средства, получает относительную скорость и интервал между транспортными средствами между обнаруженным находящимся впереди транспортным средством и рассматриваемым транспортным средством и обнаруживает запрос трогания с места, введенный водителем рассматриваемого транспортного средства. Затем, число раз, которое запрос трогания с места был обнаружен, после того как рассматриваемое транспортное средство остановилось, обнаруживается, и период разрешения трогания с места задается согласно обнаруженному числу раз запросов трогания с места. После этого рассматриваемому транспортному средству предоставляется возможность трогаться с места и следовать за находящимся впереди транспортным средством, когда период ожидания, который является периодом с момента, когда запрос трогания с места обнаруживается, до момента, когда, по меньшей мере, одно из относительной скорости и расстояния между транспортными средствами удовлетворяет предварительно заданному условию трогания с места, короче периода разрешения трогания с места. Кроме того, трогание с места запрещается, когда период ожидания больше или равен периоду разрешения трогания с места.
Преимущества изобретения
[0007] Согласно настоящему изобретению, поскольку период разрешения трогания с места задается, принимая во внимание число запросов трогания с места, представляется возможным отражать намерение водителя запрашивать трогание с места и предотвращать причинение неудобства водителю.
Краткое описание чертежей
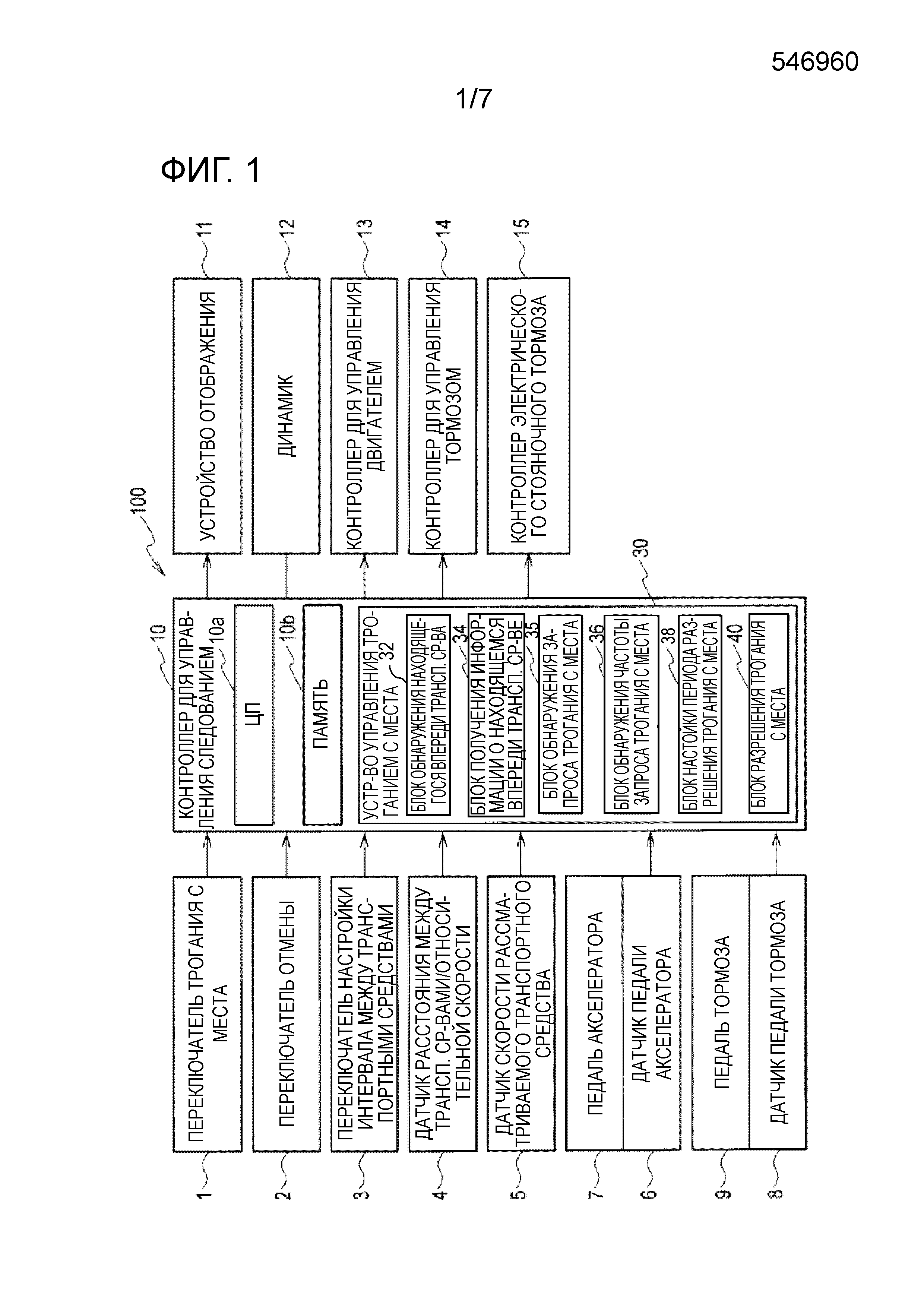
[0008] Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию системы управления следованием согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 показывает схематичную компоновку переключателей системы управления следованием согласно первому варианту осуществления настоящего изобретения.
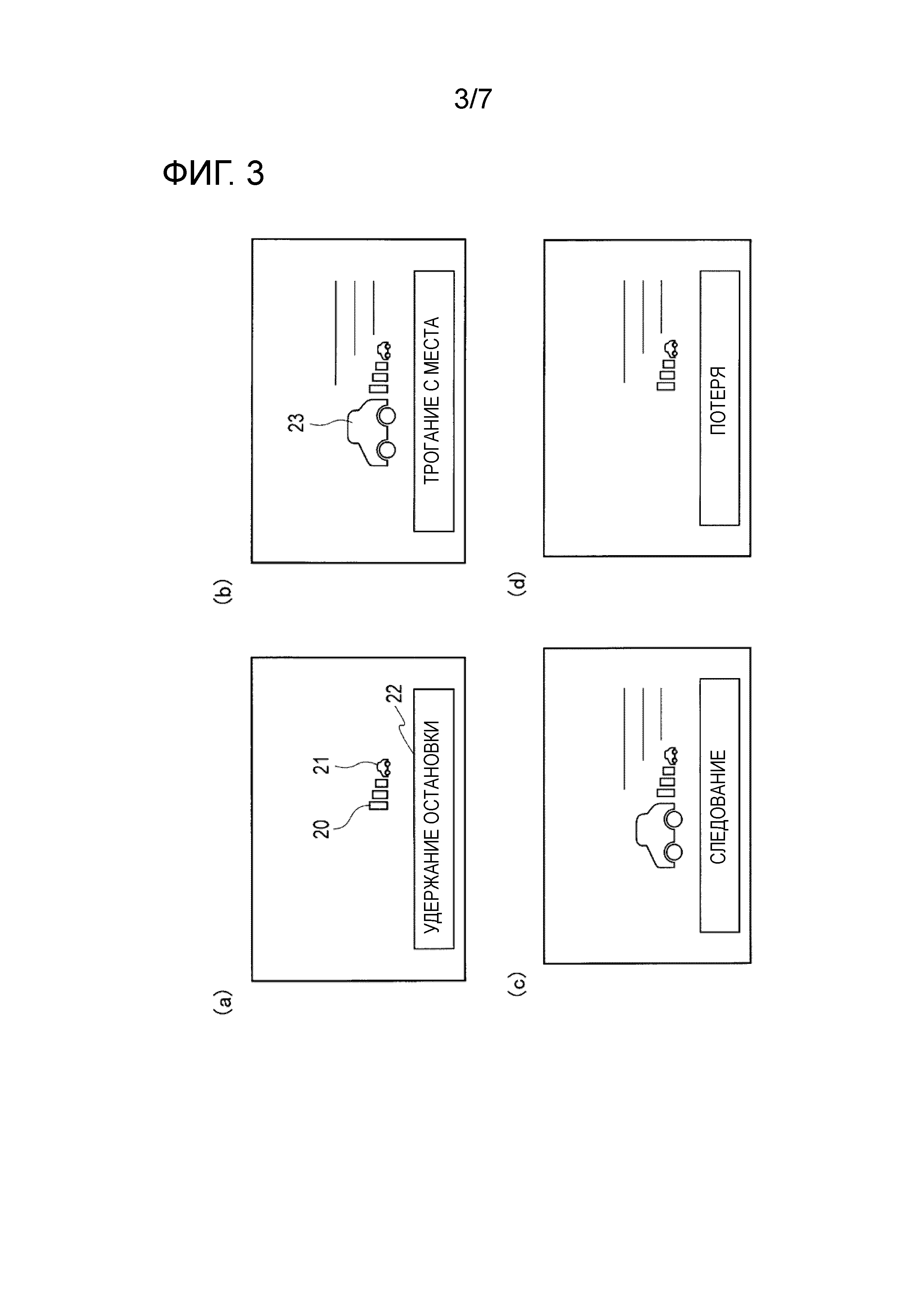
Фиг. 3 - это вид, иллюстрирующий один пример отображения посредством системы управления следованием согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 - это блок-схема последовательности операций, иллюстрирующая процедуру обработки процесса управления троганием с места посредством устройства управления троганием с места согласно первому варианту осуществления настоящего изобретения.
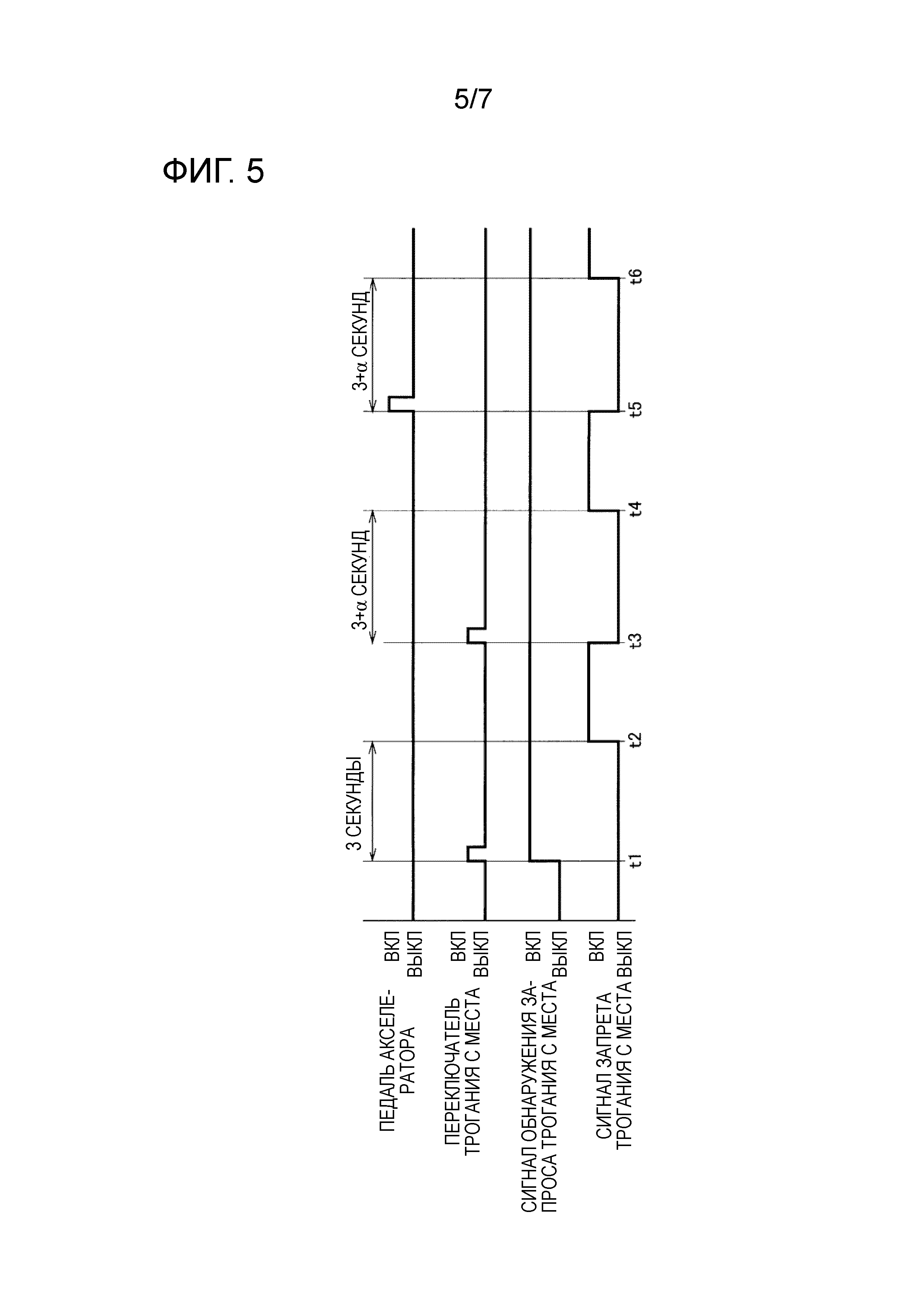
Фиг. 5 - это вид для объяснения способа задания периода разрешения трогания с места посредством устройства управления троганием с места согласно первому варианту осуществления настоящего изобретения.
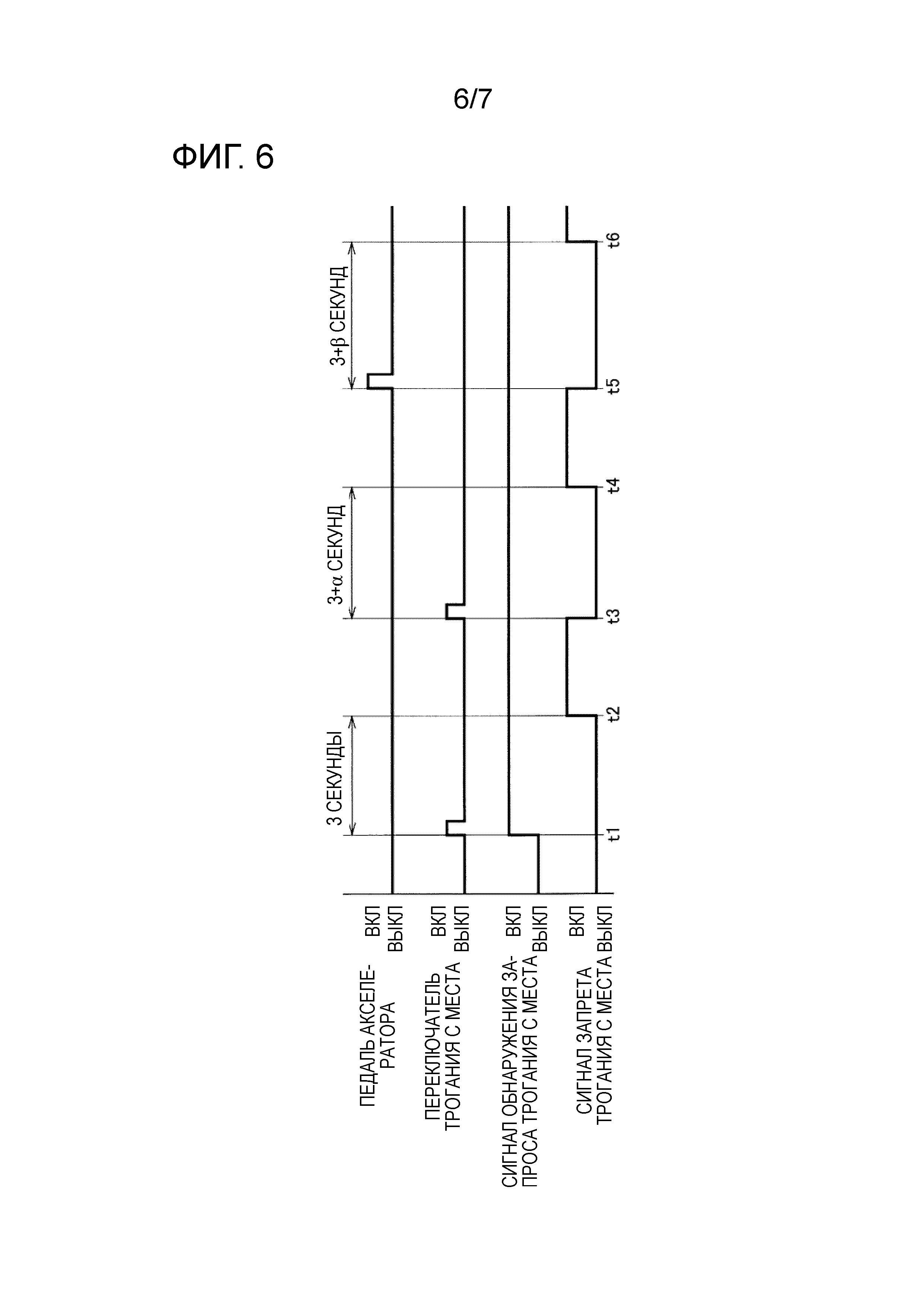
Фиг. 6 - это вид для объяснения способа задания периода разрешения трогания с места посредством устройства управления троганием с места согласно второму варианту осуществления настоящего изобретения.
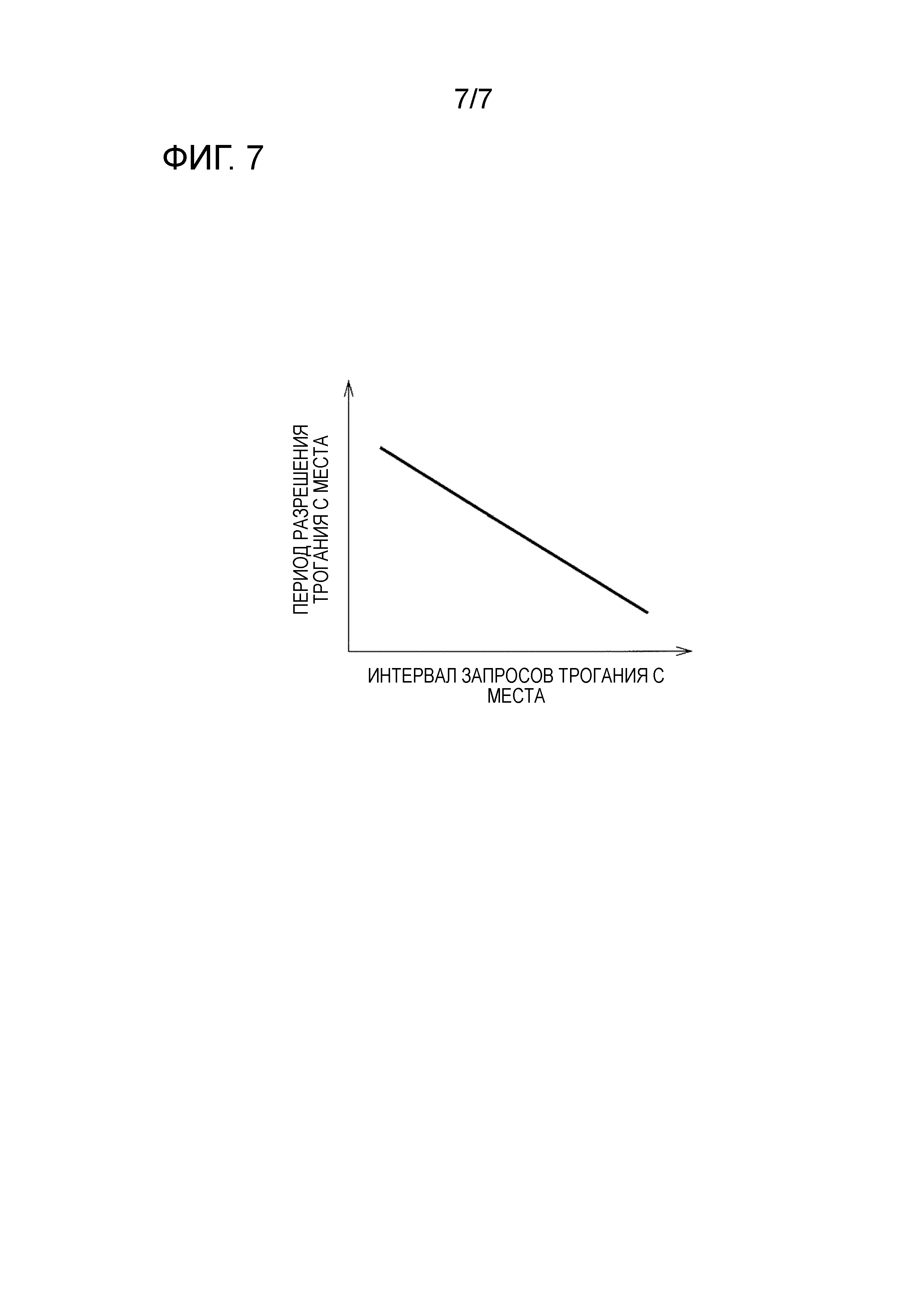
Фиг. 7 - это вид для объяснения способа задания периода разрешения трогания с места посредством устройства управления троганием с места согласно третьему варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
[0009] Первый-третий варианты осуществления, к которым настоящее изобретение применяется, описываются ниже со ссылкой на чертежи. Во всех вариантах осуществления одинаковые компоненты обозначены одинаковыми номерами, и их подробные описания пропускаются.
[0010] Первый вариант осуществления
Конфигурация системы управления следованием
Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию системы управления следованием, оборудованной устройством управления троганием с места согласно настоящему варианту осуществления. Система 100 управления следованием согласно настоящему варианту осуществления содержит переключатель 1 трогания с места, переключатель 2 отмены, переключатель 3 настройки интервала между транспортными средствами, датчик 4 расстояния между транспортными средствами/относительной скорости, датчик 5 скорости рассматриваемого транспортного средства, датчик 6 педали акселератора и датчик 8 педали тормоза, как иллюстрировано на фиг. 1. Кроме того, система 100 управления следованием содержит контроллер 10 управления следованием, устройство 11 отображения, динамик 12, контроллер 13 управления двигателем, контроллер 14 управления тормозом и контроллер 15 электрического стояночного тормоза. Контроллер 10 управления следованием содержит устройство 30 управления троганием с места.
[0011] Система 100 управления следованием содержит функцию следования с низкой скоростью и устанавливается в транспортном средстве. В настоящем варианте осуществления, если находящееся впереди транспортное средство обнаруживается на полосе движения рассматриваемого транспортного средства, когда скорость рассматриваемого транспортного средства находится в диапазоне, например, 40-100 км/ч, управление интервалом между транспортными средствами выполняется так, что время между транспортными средствами (=расстояние между транспортными средствами/относительная скорость) до находящегося впереди транспортного средства становится предварительно заданным значением для следования за находящимся впереди транспортным средством. В это время предварительно заданная скорость транспортного средства (заданная скорость транспортного средства) задается в качестве верхнего ограничения. С другой стороны, если находящееся впереди транспортное средство не обнаруживается на полосе движения рассматриваемого транспортного средства, управление скоростью транспортного средства выполняется так, что транспортное средство движется с постоянной скоростью при заданной скорости транспортного средства.
[0012] Кроме того, в функции следования с низкой скоростью, если находящееся впереди транспортное средство обнаруживается на полосе движения рассматриваемого транспортного средства, когда скорость рассматриваемого транспортного средства находится в диапазоне, например, 0-40 км/ч, управление расстоянием между транспортными средствами выполняется так, что расстояние между транспортными средствами становится расстоянием между транспортными средствами, соответствующим скорости рассматриваемого транспортного средства, при этом 40 км/ч является верхним ограничением. Затем, когда находящееся впереди транспортное средство больше не обнаруживается, управление расстоянием между транспортными средствами отменяется. Кроме того, когда находящееся впереди транспортное средство останавливается, электрический стояночный тормоз приводится в действие, после того как рассматриваемое транспортное средство останавливается, чтобы выполнять управление удержанием остановки, а когда находящееся впереди транспортное средство трогается с места, и предварительно определенный автоматический функциональный элемент для трогания с места срабатывает, выполняется автоматическое управление троганием с места.
[0013] Однако, управление следованием за находящимся впереди транспортным средством не ограничивается управлением, описанным выше. Управление следованием за находящимся впереди транспортным средством не ограничивается, пока управление выполняется, по меньшей мере, от нулевой скорости транспортного средства, управление удержанием остановки выполняется, после того как рассматриваемое транспортное средство останавливается, когда находящееся впереди транспортное средство останавливается, и автоматическое управление троганием с места выполняется, если находящееся впереди транспортное средство трогается с места, когда срабатывает предварительно определенный автоматический функциональный элемент трогания с места.
[0014] Переключатель 1 трогания с места является автоматическим функциональным элементом трогания с места, который задействуется для того, чтобы начинать автоматическое управление троганием с места, когда находящееся впереди транспортное средство трогается с места во время состояния удержания остановки. Если переключатель 1 трогания с места задействуется во время управления удержанием остановки, действием становится запрос трогания с места водителем. В настоящем варианте осуществления наличие/отсутствие запроса трогания с места, число запросов трогания с места и время с предыдущего запроса трогания с места обнаруживаются на основе выходного сигнала от переключателя 1 трогания с места, и запрос трогания с места устанавливается. Этот переключатель 1 трогания с места устанавливается в фрагменте 19a центральной подушки рулевого колеса 19, как иллюстрировано на фиг. 2.
[0015] Переключатель 2 отмены является функциональным элементом для отмены автоматического управления троганием с места и управления следованием за находящимся впереди транспортным средством и устанавливается в фрагменте 19a центральной подушки рулевого колеса 19, как иллюстрировано на фиг. 2. Переключатель 3 настройки интервала между транспортными средствами является функциональным элементом для настройки целевого интервала между транспортными средствами (времени между транспортными средствами или расстояния между транспортными средствами), и целевой интервал между транспортными средствами переключается в следующем порядке: длинный, средний и короткий, каждый раз, когда переключатель задействуется. Этот переключатель 3 настройки интервала между транспортными средствами также устанавливается в фрагменте 19a центральной подушки рулевого колеса 19, как иллюстрировано на фиг. 2.
[0016] Датчик 4 расстояния между транспортными средствами/относительной скорости измеряет расстояние между транспортными средствами между рассматриваемым транспортным средством и находящимся впереди транспортным средством и вычисляет относительную скорость, дифференцируя это измеренное значение. Различные датчики, такие как лазерный радар или радар миллиметрового диапазона, могут быть использованы для датчика 4 расстояния между транспортными средствами/относительной скорости. Датчик 5 скорости рассматриваемого транспортного средства измеряет скорость движения рассматриваемого транспортного средства из скорости колеса.
[0017] Датчик 6 педали акселератора выводит сигнал, соответствующий величине нажатия (величине срабатывания) педали 7 акселератора. Педаль 7 акселератора является автоматическим функциональным элементом для трогания с места, который приводится в действие для того, чтобы начинать автоматическое управление троганием с места, когда находящееся впереди транспортное средство трогается с места во время состояния удержания остановки, тем же образом, что и переключатель 1 трогания с места, описанный выше. Если педаль 7 акселератора задействуется во время управления для удержания остановки, действием становится запрос трогания с места водителем. В настоящем варианте осуществления наличие/отсутствие запроса трогания с места, число запросов трогания с места и время с предыдущего запроса трогания с места обнаруживаются на основе выходного сигнала от датчика 6 педали акселератора, и запрос трогания с места устанавливается.
[0018] Датчик 8 педали тормоза обнаруживает нажатие педали 9 тормоза. Когда нажатие педали 9 тормоза обнаруживается, автоматическое управление троганием с места и управление следованием за находящимся впереди транспортным средством отменяются.
[0019] Устройство 11 отображения устанавливается в приборной панели и отображает состояния автоматического управления троганием с места и управления следованием за находящимся впереди транспортным средством, а также состояние настройки интервала между транспортными средствами, как иллюстрировано на фиг. 3. Фиг. 3(a) является примером отображения во время удержания остановки. Ссылочный символ 20 на фиг. 3(a) указывает состояние настройки интервала между транспортными средствами; одна полоса указывает "короткий", две полосы указывают "средний", а три полосы указывают "длинный". Ссылочный номер 21 является меткой рассматриваемого транспортного средства. Ссылочный символ 22 является окном отображения состояния управления, которое отображает сообщения, указывающие состояние удержания остановки и состояния управления следованием за находящимся впереди транспортным средством. Фиг. 3(b) является примером отображения во время управления троганием с места. Ссылочный символ 23 является меткой находящегося впереди транспортного средства, которая должна отображаться во время автоматического управления троганием с места и во время управления следованием за находящимся впереди транспортным средством. Фиг. 3(c) является примером отображения во время управления следованием за находящимся впереди транспортным средством, а фиг. 3(d) является примером отображения непосредственно после того, как находящееся впереди транспортное средство было потеряно.
[0020] Динамик 12 выводит голосовое сообщение, представляющее различные состояния управления, и выводит предупреждающий сигнал, когда необходимо. Например, голосовое руководство "удержание остановки" предоставляется при начале управления удержанием остановки, "трогание с места" предоставляется при начале управления троганием с места, и "находящееся впереди транспортное средство потеряно" предоставляется, когда находящееся впереди транспортное средство было потеряно. Кроме того, когда водитель задействует один из переключателя 1 трогания с места, переключателя 2 отмены и переключателя 3 настройки интервала между транспортными средствами, звучит зуммерный сигнал, подтверждающий действие.
[0021] Контроллер 13 управления двигателем управляет выходной мощностью двигателя согласно команде ускорения от контроллера 10 управления следованием, а контроллер 14 управления тормозом управляет силой замедления тормоза двигателя и гидравлическим тормозом согласно команде замедления от контроллера 10 управления следованием. Контроллер 15 электрического стояночного тормоза приводит в действие электрический стояночный тормоз согласно команде удержания остановки от контроллера 10 управления следованием.
[0022] Контроллер 10 управления следованием содержит CPU 10a, память 10b и т.п. и выполняет управление удержанием остановки, автоматическое управление троганием с места, управление следованием за находящимся впереди транспортным средством, управление отображением и т.п. на основе рабочих сигналов от переключателей 1-3 и сигналов обнаружения от различных датчиков 4-6 и 8. Кроме того, контроллер 10 управления следованием управляет устройством 11 отображения, динамиком 12, контроллером 13 управления двигателем, контроллером 14 управления тормозом и контроллером 15 электрического стояночного тормоза. Память 10b хранит запись о действии и число запросов трогания с места для переключателя 1 трогания с места и педали 7 акселератора, которые являются автоматическими функциональными элементами для трогания с места, командные значения ускорения и продолжительность команды ускорения, которые являются результатом различных управляющих вычислений и т.п. Затем, контроллер 10 управления следованием содержит устройство 30 управления троганием с места.
[0023] Устройство 30 управления троганием с места используется, чтобы выполнять управление, чтобы трогать с места рассматриваемое транспортное средство, которое следует за находящимся впереди транспортным средством, которое остановилось впереди рассматриваемого транспортного средства, и содержит блок 32 обнаружения находящегося впереди транспортного средства, блок 34 получения информации о находящемся впереди транспортном средстве, блок 35 обнаружения запроса трогания с места, блок 36 определения частоты запросов трогания с места, блок 38 настройки периода разрешения трогания с места и блок 40 разрешения трогания с места.
[0024] Блок 32 обнаружения находящегося впереди транспортного средства обнаруживает находящееся впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства, и находящееся впереди транспортное средство, остановившееся впереди рассматриваемого транспортного средства, выполняя управление следованием за находящимся впереди транспортным средством, предоставляемое рассматриваемому транспортному средству.
[0025] Блок 34 получения информации о находящемся впереди транспортном средстве получает информацию, относящуюся к находящемуся впереди транспортному средству, обнаруженному посредством блока 32 обнаружения находящегося впереди транспортного средства, в качестве информации о находящемся впереди транспортном средстве. В частности, блок 34 получения информации о находящемся впереди транспортном средстве получает расстояние между транспортными средствами и относительную скорость между находящимся впереди транспортным средством и рассматриваемым транспортным средством от датчика 4 расстояния между транспортными средствами/относительной скорости и сохраняет их в памяти 10b.
[0026] Блок 35 обнаружения запроса трогания с места обнаруживает запрос трогания с места, который вводится водителем рассматриваемого транспортного средства во время управления остановкой рассматриваемого транспортного средства. В частности, переключатель 1 трогания с места, который является автоматическим функциональным элементом для трогания с места, приводится в действие, блок 35 обнаружения запроса трогания с места обнаруживает наличие/отсутствие запроса трогания с места, число запросов трогания с места и время после предыдущего запроса трогания с места на основе выходного сигнала переключателя 1 трогания с места. Аналогично, когда педаль 7 акселератора, которая является автоматическим функциональным элементом для трогания с места, приводится в действие, блок 35 обнаружения запроса трогания с места обнаруживает наличие/отсутствие запроса трогания с места, число запросов трогания с места и время после предыдущего запроса трогания с места на основе выходного сигнала от датчика 6 педали акселератора. Дополнительно, блок 35 обнаружения запроса трогания с места выводит сигнал обнаружения запроса трогания с места при получении запроса трогания с места.
[0027] Блок 36 обнаружения частоты запроса трогания с места обнаруживает число раз, которое запрос трогания с места был обнаружен, после того как рассматриваемое транспортное средство остановилось. В частности, блок 36 обнаружения частоты запроса трогания с места осуществляет доступ к памяти 10b и получает запросы трогания с места, которые были обнаружены с момента, когда рассматриваемое транспортное средство остановилось, до текущего момента, чтобы определять число запросов.
[0028] Кроме того, блок 35 обнаружения запроса трогания с места выводит сигнал обнаружения запроса трогания с места при получении запроса трогания с места, и блок 38 настройки периода разрешения трогания с места, описанный ниже, выводит сигнал запрета трогания с места для запрета трогания с места рассматриваемого транспортного средства, когда период разрешения трогания с места истек. Следовательно, если сигнал запрета трогания с места не выводится, а только сигнал обнаружения запроса трогания с места выводится, блок 36 обнаружения частоты запроса трогания с места определяет, что это первый запрос трогания с места. С другой стороны, если и сигнал обнаружения запроса трогания с места, и сигнал запрета трогания с места выводятся, это определяется как второй или последующий запрос трогания с места.
[0029] Блок 38 настройки периода разрешения трогания с места задает период разрешения трогания с места с момента, когда запрос трогания с места вводится, до момента, когда трогание с места рассматриваемого транспортного средства запрещается, в соответствии с числом раз, которое запросы трогания с места обнаруживаются посредством блока 36 обнаружения частоты запросов трогания с места. В настоящем варианте осуществления период разрешения трогания с места изменяется в зависимости от того, является ли это первым запросом трогания с места или вторым или последующим запросом трогания с места. Кроме того, блок 38 настройки периода разрешения трогания с места выводит сигнал запрета трогания с места для запрета трогания с места рассматриваемого транспортного средства, когда период разрешения трогания с места истек, и прекращает сигнал запрета трогания с места, когда вводится следующий запрос трогания с места.
[0030] Блок 40 разрешения трогания с места вычисляет длительность периода ожидания, который является периодом с момента, когда запрос трогания с места обнаруживается, до момента, когда, по меньшей мере, одно из расстояния между транспортными средствами и относительной скорости, полученное посредством блока 34 получения информации о находящемся впереди транспортном средстве, удовлетворяет предварительно заданному условию трогания с места. Затем, рассматриваемому транспортному средству разрешается трогаться с места следом за находящимся впереди транспортным средством, если этот период ожидания короче продолжительности периода разрешения трогания с места, который является предварительно заданным периодом, и трогание с места запрещается, если период ожидания больше или равен периоду разрешения трогания с места. Дополнительно, блок 40 разрешения трогания с места может предоставлять возможность рассматриваемому транспортному средству трогаться с места следом за находящимся впереди транспортным средством, если, по меньшей мере, одно из расстояния между транспортными средствами и относительной скорости, полученное посредством блока 34 получения информации о находящемся впереди транспортном средстве, удовлетворяет предварительно заданному условию трогания с места, в течение периода разрешения трогания с места, заданного посредством блока 38 настройки периода разрешения трогания с места.
[0031] Устройство 30 управления троганием с места конфигурируется из электронной схемы общего назначения, которая включает в себя микрокомпьютер, микропроцессор и CPU и периферийные устройства, такие как память. Затем, выполняя конкретную программу, устройство управления троганием с места действует как блок 32 обнаружения находящегося впереди транспортного средства, блок 34 получения информации о находящемся впереди транспортном средстве, блок 35 обнаружения запроса трогания с места, блок 36 обнаружения частоты запроса трогания с места, блок 38 настройки периода разрешения трогания с места и блок 40 разрешения трогания с места, описанные выше.
[0032] Процедура процесса управления троганием с места
Далее, процедура процесса управления троганием с места посредством устройства 30 управления троганием с места согласно настоящему варианту осуществления будет описана со ссылкой на блок-схему последовательности операций на фиг. 4. На фиг. 4 будет описано действие из состояния управления удержанием остановки.
[0033] Когда рассматриваемое транспортное средство входит в состояние управления удержанием остановки на этапе S10, блок 35 обнаружения запроса трогания с места определяет, был или нет запрос трогания с места, который становится инициатором трогания с места, введен от водителя на этапе S20, как иллюстрировано на фиг. 4. Запрос трогания с места вводится водителем, задействующим переключатель 1 трогания с места или педаль 7 акселератора, которые являются автоматическими функциональными элементами для трогания с места. Если запрос трогания с места не был введен, процесс возвращается к этапу S10, и состояние управления удержанием остановки сохраняется. С другой стороны, если запрос трогания с места был введен, блок 35 обнаружения запроса трогания с места получает запрос трогания с места, который был введен, и выводит сигнал обнаружения запроса трогания с места, и процесс переходит к этапу S30. Например, если переключатель 1 трогания с места задействуется в момент времени t1, блок 35 обнаружения запроса трогания с места изменяет сигнал обнаружения запроса трогания с места с выключенного на включенный и выводит его, как иллюстрировано на фиг. 5. Этот сигнал обнаружения запроса трогания с места непрерывно выводится до тех пор, пока рассматриваемое транспортное средство не тронется с места.
[0034] На этапе S30 блок 32 обнаружения находящегося впереди транспортного средства ищет присутствие находящегося впереди транспортного средства, задействуя датчик 4 расстояния между транспортными средствами/относительной скоростью, и обнаруживает находящееся впереди транспортное средство, которое остановилось впереди рассматриваемого транспортного средства. В это время, если используется лазерный радар, для того, чтобы избегать излучения лазерного света на пешехода, лазерный радар выключается, пока транспортное средство остановлено, и задействуется при подтверждении присутствия находящегося впереди транспортного средства. Затем, если находящееся впереди транспортное средство не может быть обнаружено, процесс переходит к этапу S40, а если находящееся впереди транспортное средство может быть обнаружено, процесс переходит к этапу S60.
[0035] На этапе S40 блок 35 обнаружения запроса трогания с места определяет, был или нет запрос трогания с места введен посредством срабатывания переключателя 1 трогания с места. Здесь, если запрос трогания с места был введен посредством срабатывания переключателя 1 трогания с места, предупреждение "не может тронуться с места, поскольку не существует находящегося впереди транспортного средства" выдается посредством устройства 11 отображения и динамика 12, и процесс возвращается к этапу S10, чтобы продолжать управление удержанием остановки. С другой стороны, если запрос трогания с места был введен не посредством переключателя 1 трогания с места, а посредством срабатывания педали 7 акселератора, процесс переходит к этапу S50.
[0036] На этапе S50 контроллер 10 управления следованием определяет, что водитель намеревается трогаться с места, даже если не существует находящееся впереди транспортное средство, отменяет управление удержанием остановки, вручную приводит в действие транспортное средство и заканчивает процесс управления троганием с места согласно настоящему варианту осуществления.
[0037] На этапе S60 блок 34 получения информации о находящемся впереди транспортном средстве получает расстояние между транспортными средствами и относительную скорость между находящимся впереди транспортным средством и рассматриваемым транспортным средством от датчика 4 расстояния между транспортными средствами/относительной скорости в качестве информации о находящемся впереди транспортном средстве.
[0038] На этапе S70 блок 36 обнаружения частоты запроса трогания с места обнаруживает число запросов трогания с места. В настоящем варианте осуществления блок 36 обнаружения частоты запроса трогания с места использует сигнал запрета трогания с места и сигнал обнаружения запроса трогания с места, описанные ниже, и определяет, является ли это первым запросом трогания с места или вторым или последующим запросом трогания с места.
[0039] Например, в момент времени t1, выводится только сигнал обнаружения запроса трогания с места, а сигнал запрета трогания с места выключен и не выводится, как иллюстрировано на фиг. 5; следовательно, определяется, что запрос трогания с места во время t1 является первым запросом трогания с места. Кроме того, во время t3, поскольку и сигнал обнаружения запроса трогания с места, и сигнал запрета трогания с места выводятся, определяется, что запрос трогания с места во время t3 является вторым или последующим запросом трогания с места.
[0040] Сигнал обнаружения запроса трогания с места непрерывно выводится с момента, когда вводится первый запрос трогания с места, до момента, когда рассматриваемое транспортное средство трогается с места, как иллюстрировано на фиг. 5. Кроме того, сигнал запрета трогания с места выводится, когда период разрешения трогания с места истек. Следовательно, если выводятся и сигнал обнаружения запроса трогания с места, и сигнал запрета трогания с места, когда вводится запрос трогания с места, может быть определено, что это второй или последующий запрос трогания с места.
[0041] На этапе S80 блок 38 настройки периода разрешения трогания с места задает период разрешения трогания с места согласно числу запросов трогания с места, обнаруженному на этапе S70. Период разрешения трогания с места является периодом с момента, когда запрос трогания с места вводится, до момента, когда трогание с места рассматриваемого транспортного средства запрещается. В настоящем варианте осуществления период разрешения трогания с места изменяется в зависимости от того, является ли это первым запросом трогания с места или вторым или последующим запросом трогания с места. Например, если это первый запрос трогания с места, период (t1-t2) разрешения трогания с места задается в 3 секунды, а если это второй или последующий запрос трогания с места, период (t3-t4, и т.д.) разрешения трогания с места устанавливается в 3+α секунд, как иллюстрировано на фиг. 5. Даже когда это третий или четвертый запрос трогания с места, период разрешения трогания с места устанавливается в 3+α секунд, тем же образом, что и второй запрос трогания с места. Поскольку намерение водителя начинать движение рассматриваемого транспортного средства больше при вводе второго или последующего запроса трогания с места, по сравнению с тем, когда вводится первый запрос трогания с места, период разрешения трогания с места задается более длительным для второго и более позднего запроса трогания с места, чтобы отражать упомянутое намерение.
[0042] На этапе S90 блок 38 настройки периода разрешения трогания с места определяет, истек или нет период разрешения трогания с места, заданный на этапе S80. Затем, например, если период разрешения трогания с места не истек, как, например, в течение времени t1-t2 на фиг. 5, процесс переходит к этапу S100.
[0043] С другой стороны, если это время после времени t2 на фиг. 5, и период разрешения трогания с места истек, блок 38 настройки периода разрешения трогания с места выводит сигнал запрета трогания с места для запрета трогания с места рассматриваемого транспортного средства в качестве флага запрета трогания с места, и процесс возвращается к этапу S10, чтобы продолжать управление удержанием остановки. Сигнал запрета трогания с места, который был выведен, прекращается, когда следующий запрос трогания с места вводится во время t3 на фиг. 5.
[0044] Кроме того, в настоящем варианте осуществления, рассматриваемому транспортному средству запрещается трогаться с места и следовать за находящимся впереди транспортным средством посредством вывода сигнала запрета трогания с места; однако, трогание с места рассматриваемого транспортного средства может быть запрещено посредством прекращения сигнала обнаружения запроса трогания с места. Например, во время t2 на фиг. 5, сигнал обнаружения запроса трогания с места может быть прекращен вместо вывода сигнала запрета трогания с места.
[0045] На этапе S100 блок 40 разрешения трогания с места определяет, было или нет удовлетворено условие трогания с места. В частности, блок 40 разрешения трогания с места определяет, удовлетворяет или нет, по меньшей мере, одно из расстояния между транспортными средствами и относительной скорости, полученное на этапе S60, предварительно заданному условию трогания с места. Если условие трогания с места удовлетворяется, процесс переходит к этапу S110, а если условие трогания с места не удовлетворяется, процесс возвращается к этапу S90, чтобы определять, истек или нет период разрешения трогания с места.
[0046] На этапе S105 блок 40 разрешения трогания с места вычисляет продолжительность периода ожидания, который является периодом с момента, когда запрос трогания с места обнаруживается, до тех пор, когда условие трогания с места удовлетворяется. Затем, рассматриваемому транспортному средству разрешается трогаться с места следом за находящимся впереди транспортным средством, если этот период ожидания короче продолжительности периода разрешения трогания с места, и процесс переходит к этапу S110. С другой стороны, трогание с места запрещается, когда период трогания с места больше или равен периоду разрешения трогания с места, и процесс возвращается к этапу S10.
[0047] На этапе S110 контроллер 10 управления следованием выполняет управление следованием за находящимся впереди транспортным средством, чтобы начинать движение рассматриваемого транспортного средства следом за находящимся впереди транспортным средством, и заканчивает процесс управления троганием с места согласно настоящему варианту осуществления.
[0048] Результаты первого варианта осуществления
Как описано выше подробно, в устройстве 30 управления троганием с места согласно настоящему варианту осуществления, период разрешения трогания с места задается согласно числу запросов трогания с места, и рассматриваемому транспортному средству разрешается трогаться с места и следовать за находящимся впереди транспортным средством, когда период ожидания короче периода разрешения трогания с места. Кроме того, трогание с места запрещается, когда период ожидания больше или равен периоду разрешения трогания с места. Поскольку период разрешения трогания с места задается, таким образом, принимая во внимание число запросов трогания с места, представляется возможным отражать намерение водителя запрашивать трогание с места и предотвращать причинение неудобства водителю.
[0049] Кроме того, в устройстве 30 управления троганием с места согласно настоящему варианту осуществления, определяется, является ли запрос трогания с места первым запросом трогания с места или вторым или последующим запросом трогания с места, и период разрешения трогания с места изменяется в зависимости от того, является ли он первым запросом трогания с места или вторым или последующим запросом трогания с места. Поскольку, таким образом, представляется возможным задавать период разрешения трогания с места, в частности, отражающий намерение водителя запрашивать трогание с места, представляется возможным предотвращать причинение неудобства водителю.
[0050] Дополнительно, в устройстве 30 управления троганием с места согласно настоящему варианту осуществления, сигнал обнаружения запроса трогания с места выводится, когда обнаруживается запрос трогания с места, и сигнал запрета трогания с места выводится, когда период разрешения трогания с места истек. Затем, если выводится только сигнал обнаружения запроса трогания с места, определяется, что запрос трогания с места является первым запросом трогания с места, а если выводятся как сигнал обнаружения запроса трогания с места, так и сигнал запрета трогания с места, он определяется как второй или последующий запрос трогания с места. Поскольку, таким образом, представляется возможным, в частности, определять, является ли запрос трогания с места первым запросом трогания с места или вторым или последующим запросом трогания с места, представляется возможным задавать период разрешения трогания с места, отражающий намерение водителя запрашивать трогание с места, и предотвращать причинение неудобства водителю.
[0051] Второй вариант осуществления
Далее, устройство управления троганием с места согласно второму варианту осуществления настоящего изобретения будет описано со ссылкой на чертежи. Поскольку конфигурация системы управления следованием согласно настоящему варианту осуществления является такой же, что и в первом варианте осуществления, ее подробное описание пропускается. В первом варианте осуществления период разрешения трогания с места изменяется в зависимости от того, первый ли это запрос трогания с места или второй или последующий запрос трогания с места; однако, в настоящем варианте осуществления, период разрешения трогания с места изменяется, когда число запросов трогания с места увеличивается.
[0052] Когда переключатель 1 трогания с места или педаль 7 акселератора, которые являются автоматическими функциональными элементами для трогания с места, задействуются, блок 35 обнаружения запроса трогания с места настоящего варианта осуществления обнаруживает запрос трогания с места и сохраняет его в памяти 10b. Затем, блок 36 обнаружения частоты запроса трогания с места осуществляет доступ к памяти 10b и подсчитывает, сколько раз запрос трогания с места был выполнен, включающий в себя текущий запрос трогания с места, чтобы обнаруживать число запросов трогания с места. Затем, блок 38 настройки периода разрешения трогания с места изменяет период разрешения трогания с места, когда подсчитанное число запросов трогания с места увеличивается.
[0053] Например, если это первый запрос трогания с места, период разрешения трогания с места задается в 3 секунды, если это второй запрос трогания с места, период разрешения трогания с места устанавливается в 3+α секунд, а если это третий запрос трогания с места, период разрешения трогания с места задается в 3+β секунд, как иллюстрировано на фиг. 6. После этого период разрешения трогания с места постепенно увеличивается, когда число запросов трогания с места увеличивается. В это время период разрешения трогания с места может быть задан, например, с 10 секундами, являющимися верхним ограничением. Поскольку намерение водителя трогать с места рассматриваемое транспортное средство может рассматриваться, как становящееся больше, когда число раз, которое запрос трогания с места вводится, увеличивается, период разрешения трогания с места задается более длительным, когда число запросов трогания с места увеличивается, чтобы отражать упомянутое намерение.
[0054] Результаты второго варианта осуществления
Как описано выше подробно, в устройстве 30 управления троганием с места согласно настоящему варианту осуществления, число запросов трогания с места подсчитывается, и период разрешения трогания с места изменяется, когда число запросов трогания с места увеличивается. Поскольку, таким образом, представляется возможным задавать период разрешения трогания с места, в частности, отражающий намерение водителя запрашивать трогание с места, представляется возможным предотвращать причинение неудобства водителю.
[0055] Третий вариант осуществления
Далее, устройство управления троганием с места согласно третьему варианту осуществления настоящего изобретения будет описано со ссылкой на чертежи. Поскольку конфигурация системы управления следованием согласно настоящему варианту осуществления является такой же, что и в первом варианте осуществления, ее подробное описание пропускается. Настоящий вариант осуществления отличается от вышеописанных вариантов осуществления в том, что период разрешения трогания с места изменяется согласно интервалу, с которым запросы трогания с места вводятся.
[0056] Когда переключатель 1 трогания с места или педаль 7 акселератора, которые являются автоматическими функциональными элементами для трогания с места, задействуется, блок 35 обнаружения запроса трогания с места настоящего варианта осуществления обнаруживает запрос трогания с места, сравнивает запрос трогания с места с предыдущим запросом трогания с места, сохраненным в памяти 10b и обнаруживает интервал между предыдущим запросом трогания с места и текущим запросом трогания с места. Затем, блок 38 настройки периода разрешения трогания с места изменяет период разрешения трогания с места согласно интервалу, с которым запросы трогания с места вводятся.
[0057] Например, период разрешения трогания с места задается коротким, когда интервал между запросами трогания с места является длительным, и период разрешения трогания с места задается, чтобы становиться более длительным, когда интервал между запросами трогания с места становится более коротким, как иллюстрировано на фиг. 7. Поскольку намерение водителя трогать с места рассматриваемое транспортное средство может считаться сильным, если интервал между запросами трогания с места является коротким, т.е., когда запросы трогания с места часто вводятся, период разрешения трогания с места задается более длительным, когда интервал между запросами трогания с места становится более коротким, чтобы отражать упомянутое намерение.
[0058] Результаты третьего варианта осуществления
Как описано выше подробно, в устройстве 30 управления троганием с места согласно настоящему варианту осуществления, интервал, с которым водитель рассматриваемого транспортного средства вводит запросы трогания с места, обнаруживается, и период разрешения трогания с места изменяется согласно интервалу, с которым запросы трогания с места вводятся. Поскольку, таким образом, представляется возможным задавать период разрешения трогания с места, в частности, отражающий намерение водителя запрашивать трогание с места, представляется возможным предотвращать причинение неудобства водителю.
[0059] Вышеописанные варианты осуществления являются примерами настоящего изобретения. Соответственно, настоящее изобретение не ограничивается вариантами осуществления, описанными выше, и различные модификации могут быть выполнены в других формах помимо форм вышеупомянутых вариантов осуществления в такой степени, что такие изменения не находятся за пределами технических рамок настоящего изобретения.
Описания ссылочных символов
[0060] 1 Переключатель трогания с места
2 Переключатель отмены
3 Переключатель настройки интервала между транспортными средствами
4 Датчик расстояния между транспортными средствами/относительной скорости
5 Датчик скорости рассматриваемого транспортного средства
6 Датчик педали акселератора
7 Педаль акселератора
8 Датчик педали тормоза
9 Педаль тормоза
10 Контроллер управления следованием
11 Устройство отображения
12 Динамик
13 Контроллер управления двигателем
14 Контроллер управления тормозом
15 Контроллер электрического стояночного тормоза
30 Устройство управления троганием с места
32 Блок обнаружения находящегося впереди транспортного средства
34 Блок получения информации о находящемся впереди транспортном средстве
35 Блок обнаружения запроса трогания с места
36 Блок обнаружения частоты запроса трогания с места
38 Блок настройки периода разрешения трогания с места
40 Блок разрешения трогания с места
100 Система управления следованием.
Реферат
Изобретение относится к транспортным средствам (ТС). Устройство управления троганием с места ТС, следующего за находящимся впереди ТС, которое остановилось впереди рассматриваемого ТС, содержит блок обнаружения находящегося впереди ТС; блок получения информации о нем и блок обнаружения запроса водителем рассматриваемого ТС на трогание с места. Также имеется контроллер, инструктирующий рассматриваемому ТС трогаться с места следом за находящимся впереди ТС, когда период ожидания короче периода разрешения трогания с места. Блок обнаружения частоты обнаруживает число запросов трогания с места, после остановки рассматриваемого ТС. Блок настройки периода разрешения трогания с места увеличивает длительность периода разрешения трогания с места, когда число запросов трогания с места увеличивается. Повышается удобство при вождении. 2 н. и 4 з.п. ф-лы, 7 ил.
Комментарии