Способ, система и компьютерная программа для управления движением самоходного бурового агрегата, а также самоходный буровой агрегат - RU2681177C1
Код документа: RU2681177C1
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу управления движением самоходного бурового агрегата. Изобретение также относится к компьютерному программному продукту, содержащему программный код для компьютера для осуществления способа в соответствии с изобретением. Изобретение также относится к системе для управления движением самоходного бурового агрегата и к самоходному буровому агрегату, снабженному такой системой.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В настоящее время имеются различные платформы, имеющие гусеничные ленты, при этом указанные платформы доступны для различных применений. Самоходный буровой агрегат может представлять собой один пример такой платформы, имеющей гусеничные ленты. Указанный самоходный буровой агрегат может быть, например, выполнен с возможностью работы на поверхности земли. При этом самоходный буровой агрегат может быть выполнен с возможностью выполнения различных видов строительных работ.
Управление указанными платформами может осуществляться оператором, то есть водитель может управлять движением и работой, например, инструментов или машин платформы из кабины. В качестве альтернативы указанные платформы могут быть радиоуправляемыми/дистанционно управляемыми.
Указанная платформа может быть выполнена с возможностью управления ею посредством так называемого управления гусеничными лентами. Данные платформы могут быть приведены в движение посредством гусеничных лент или колес. При этом управление скоростью гусеничной ленты на первой стороне и скоростью второй гусеничной ленты на второй стороне может осуществляться вручную посредством соответствующих электронных или механических исполнительных средств, например, рулевого колеса и педали акселератора. Таким образом, поворот платформы может обеспечиваться за счет использования различных скоростей указанной первой гусеничной ленты и указанной второй гусеничной ленты.
При движении платформы, включающем в себя выполнение поворотов, могут возникать различные неблагоприятные ситуации. В частности, данные неблагоприятные ситуации могут возникать при изменении направления движения, когда движение выполняется на мокрой поверхности, скользкой грязной поверхности или поверхности, образованной песком, когда сравнительно большие усилия прикладываются посредством гусеничных лент для поворота платформы вокруг ее оси поворота.
Данные неблагоприятные ситуации могут быть частично связаны с непростым управлением платформой, когда оператор должен выполнять переключения передач трансмиссии платформы и одновременно с этим должен внимательно следить за тем, чтобы движение было безопасным. Кроме того, в некоторых случаях водитель также должен принимать во внимание транспортируемое оборудование, например, такое как бурильные устройства, во время движения указанной платформы. Движение платформы с двумя гусеничными лентами может рассматриваться оператором как сложное, в частности, во время поворота, поскольку некоторое число рабочих задач должно выполняться одновременно или по существу одновременно.
Данные неблагоприятные ситуации могут быть связаны с нежелательными изменениями условий эксплуатации платформы. Эти изменения условий эксплуатации могут относиться к нежелательному уменьшению текущего числа оборотов двигателя платформы вследствие увеличенной нагрузки на платформу, возникающей во время указанных изменений направления движения. При этом двигатель может заглохнуть нежелательным образом. В определенных ситуациях указанные гусеничные ленты при этом останавливаются, если увеличенная нагрузка на платформу становится слишком большой.
В документе US 7,290,390 B2 показано устройство управления для гидравлического экскаватора гусеничного типа, в котором обеспечивается медленный пуск во время ручного управления им.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, существует потребность в надежном, удобном для пользователя и устойчивом способе управления платформой, имеющей две гусеничные ленты для движения платформы.
Одна задача настоящего изобретения состоит в разработке нового и предпочтительного способа управления движением самоходного бурового агрегата.
Другая задача изобретения состоит в разработке новой и предпочтительной системы для управления движением самоходного бурового агрегата и новой и предпочтительной компьютерной программы для управления движением самоходного бурового агрегата.
Еще одна задача изобретения состоит в разработке альтернативного способа, альтернативной системы и альтернативной компьютерной программы для управления движением самоходного бурового агрегата.
Еще одна задача изобретения состоит в разработке удобного для пользователя способа обеспечения надежного движения самоходного бурового агрегата, при котором уменьшается опасность останова и/или разрыва гусеничных лент во время движения.
Еще одна задача изобретения состоит в разработке способа, системы и компьютерной программы для улучшения эксплуатационных характеристик самоходного бурового агрегата так называемого гусеничного типа.
Некоторые из указанных задач решаются посредством способа управления движением самоходного бурового агрегата в соответствии с пунктом 1 формулы изобретения. Другие задачи решаются посредством системы управления движением самоходного бурового агрегата в соответствии с пунктом 9 формулы изобретения. Предпочтительные варианты осуществления показаны в зависимых пунктах формулы изобретения.
В соответствии с одним аспектом изобретения разработан способ управления движением самоходного бурового агрегата, при этом указанный самоходный буровой агрегат содержит правое ходовое средство и левое ходовое средство и устройство взаимно независимого регулирования скорости и трансмиссию для приведения в движение указанных правого ходового средства и левого ходового средства, при этом указанная трансмиссия обеспечивает, по меньшей мере, две передачи, включающий этапы:
- запрашивания скорости хода для указанного правого ходового средства и для указанного левого ходового средства;
- определения разности между запрашиваемыми скоростями хода указанного правого ходового средства и указанного левого ходового средства;
- определения подходящей передачи на основе разности, определенной таким образом.
Указанные, по меньшей мере, две передачи в соответствии с одним примером предусмотрены в коробке передач.
При этом обеспечивается надежный и удобный для пользователя способ управления движением самоходного бурового агрегата. Во время поворота указанного самоходного бурового агрегата может быть определена подходящая, более низкая передача для обеспечения возможности автоматического включения понижающей передачи трансмиссии самоходного бурового агрегата. Таким образом, оператор может быть освобожден и за счет этого может получить лучшие возможности для идентификации подвижных или неподвижных объектов или людей в зоне, окружающей самоходный буровой агрегат. Таким образом, может быть обеспечено движение самоходного бурового агрегата более безопасным образом.
Число рабочих задач для оператора самоходного бурового агрегата предпочтительно уменьшается, что обеспечивает лучшие производственные условия и меньшее напряжение.
Способ может включать этап:
- приведения указанного самоходного бурового агрегата в движение посредством гусеничных лент или колес, при этом поворот указанного самоходного бурового агрегата обеспечивается посредством приведения указанного правого ходового средства и указанного левого ходового средства в движение с разными скоростями.
Способ может включать этап:
- при определенной подходящей передаче, более низкой, чем текущая передача, автоматического переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу. При этом обеспечивается устойчивый, надежный и удобный для пользователя способ управления движением указанного самоходного бурового агрегата. При обеспечении автоматического процесса переключения на понижающую передачу уменьшается число рабочих задач для оператора самоходного бурового агрегата.
Подходящая передача может представлять собой, например, ближайшую, более низкую передачу по сравнению с текущей передачей. В том случае, когда текущая передача представляет собой, например, третью передачу, и определено, что требуется понижение до второй передачи, указанная вторая передача в данном случае названа подходящей передачей.
В соответствии с одним примером подходящая передача может представлять собой более низкую передачу по сравнению с текущей передачей, при этом различие между ними составляет несколько ступеней. В том случае, когда текущая передача представляет собой, например, третью передачу, и определено, что требуется понижение до первой передачи, указанная первая передача при этом будет названа подходящей передачей. В зависимости от величины указанной разности между запрашиваемыми скоростями хода указанных правого и левого ходовых средств может быть определено число ступеней, относящихся к переключению передачи. Таким образом, новая передача, на которую должно быть выполнено переключение относительно текущей передачи, определяется на основе разности, определенной таким образом. Указанная новая ступень передачи/передача может быть обозначена как подходящая ступень передачи/передача.
В соответствии с одним примером подходящая передача может представлять собой такую же передачу, как текущая передача. При этом не будет выполняться никакого автоматического изменения текущей передачи.
Способ может включать этап:
- автоматического переключения передачи с указанной, более низкой передачи на более высокую передачу.
Способ может включать этап:
- после этапа автоматического переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу автоматического переключения передачи с указанной, более низкой передачи на предыдущую, более высокую передачу.
В соответствии с одним аспектом изобретения разработан способ управления движением самоходного бурового агрегата, при этом указанный самоходный буровой агрегат содержит правое ходовое средство и левое ходовое средство и устройство взаимно независимого регулирования скорости и трансмиссию для приведения в движение указанных правого ходового средства и левого ходового средства, при этом указанная трансмиссия обеспечивает, по меньшей мере, две передачи, включающий этапы:
- запрашивания скоростей хода для указанного правого ходового средства и для указанного левого ходового средства;
- определения разности между запрашиваемыми скоростями хода указанного правого ходового средства и указанного левого ходового средства;
- определения передачи на основе разности, определенной таким образом, или
- определения передачи, более низкой, чем текущая передача, на основе разности, определенной таким образом, или
- определения релевантной передачи, при этом указанная передача может быть включена, на основе разности, определенной таким образом.
Способ может включать этап:
- при определенной подходящей передаче, более низкой, чем текущая передача,
- извещения оператора о необходимости переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу, в результате чего указанный оператор может выбрать ручное переключение передачи. При этом предпочтительно обеспечивается отличная основа для принятия решения оператором самоходного бурового агрегата для обеспечения возможности безопасного и экологически благоприятного движения самоходного бурового агрегата. За счет расчета/определения/моделирования подходящей, более низкой передачи трансмиссии самоходного бурового агрегата самоходный буровой агрегат может быть приведен в движение во время по существу оптимальной эксплуатации с точки зрения расхода топлива и генерируемых рабочих крутящих моментов ходовых средств самоходного бурового агрегата.
Способ может включать этап:
- сравнения указанной разности между запрашиваемыми скоростями хода указанного правого ходового средства и указанного левого ходового средства с заданной пороговой величиной, при этом подходящую передачу определяют, если указанная разность превышает указанную пороговую величину. При этом обеспечивается эффективный с точки зрения затрат времени и надежный способ включения/выполнения, например, переключения передачи трансмиссии самоходного бурового агрегата. Нежелательное переключение передачи предпочтительно будет предотвращено посредством указанного сравнения. При этом обеспечивается экономичный способ достижения надежной эксплуатации, комфорта для водителя и уменьшения износа компонентов самоходного бурового агрегата, например, в его коробке передач.
Способ может включать этап:
- определения запрашиваемой скорости хода для указанного правого ходового средства и указанного левого ходового средства, при этом указанную разность исходно определяют только в том случае, если, по меньшей мере, одна скорость хода превышает заданную пороговую величину.
При этом обеспечивается надежный способ избежания нежелательного осуществления, например, изменения передачи трансмиссии самоходного бурового агрегата. Нежелательное изменение передачи предпочтительно будет предотвращено за счет учета указанных определенных запрашиваемых скоростей хода. При этом обеспечивается экономичный способ достижения надежной эксплуатации, комфорта для водителя и уменьшения износа компонентов самоходного бурового агрегата, например, в его коробке передач.
Способ может включать этап:
- определения запрашиваемой скорости хода для указанного правого ходового средства и указанного левого ходового средства, при этом указанная передача может быть автоматически переключена на передачу, более низкую, чем текущая передача, в том случае, если запрашиваемые скорости хода относятся к противоположным направлениям для указанного правого ходового средства и указанного левого ходового средства.
Способ может включать этап применения гистерезиса или фильтрации алгоритмов вычислений по изобретению для уменьшения риска нежелательных частых изменений передач в сторону повышения и понижения. При этом обеспечивается устойчивое автоматическое управление движением самоходного бурового агрегата.
В соответствии с одним аспектом настоящего изобретения разработана система управления движением самоходного бурового агрегата, при этом указанный самоходный буровой агрегат содержит правое ходовое средство и левое ходовое средство, выполненные с возможностью взаимно независимого регулирования скорости, и трансмиссию, выполненную с возможностью приведения в движение указанных правого ходового средства и левого ходового средства, при этом указанная трансмиссия обеспечивает, по меньшей мере, две передачи, содержащая:
- исполнительное средство, выполненное с возможностью запрашивания скорости хода для указанного правого ходового средства и для указанного левого ходового средства;
- средства управления, выполненные с возможностью определения разности между запрашиваемыми скоростями хода указанных правого ходового средства и левого ходового средства; и
- средства управления, выполненные с возможностью определения подходящей передачи на основе разности, определенной таким образом.
Указанные, по меньшей мере, две передачи в соответствии с одним примером могут быть предусмотрены в коробке передач.
Указанные средства управления, выполненные с возможностью определения разности между запрашиваемыми скоростями хода указанных правого ходового средства и левого ходового средства, могут быть названы первыми средствами управления.
Указанные средства управления, выполненные с возможностью определения подходящей передачи на основе разности, определенной таким образом, могут быть названы вторыми средствами управления.
Указанный самоходный буровой агрегат может быть выполнен с возможностью приведения его в движение посредством гусеничных лент или колес и при этом может быть выполнен с возможностью его поворота посредством приведения указанного правого ходового средства и указанного левого ходового средства в движение с разными скоростями.
Система может содержать:
- средства, выполненные с возможностью - при определенной подходящей передаче, более низкой, чем текущая передача, - автоматического переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу.
Система может содержать:
- средства, выполненные с возможностью автоматического переключения передачи с указанной, более низкой передачи на более высокую передачу. Указанная, более высокая передача может представлять собой предшествующую, более высокую передачу.
Система может содержать:
- средства, выполненные с возможностью применения гистерезиса или фильтрации алгоритмов вычислений по изобретению для уменьшения риска нежелательных частых изменений передачи в сторону повышения или понижения. При этом обеспечивается устойчивое автоматическое управление движением самоходного бурового агрегата.
Система может содержать:
- средства, выполненные с возможностью - при определенной подходящей передаче, более низкой, чем текущая передача, - извещения оператора о необходимости изменения передачи с указанной текущей передачи на указанную определенную, более низкую передачу, при этом предусмотрено средство, посредством которого указанный оператор может вручную переключить передачу. Указанные средства, выполненные с возможностью извещения об указанной необходимости, могут содержать экран, например, сенсорный экран. Указанные средства могут содержать средства для звукового и/или тактильного и/или визуального представления информации/команд/рекомендаций, относящихся к изменению/переключению указанной текущей передачи. Указанные средства могут содержать устройство с громкоговорителем.
Система может представлять собой полуавтоматическую систему, при этом оператор может выбирать передачу вручную. При этом система может содержать средства, выполненные с возможностью - в том случае, когда это применимо, - автоматического переключения передачи с более низкой передачи на указанную выбранную передачу, при этом указанная, более низкая передача была определена на основе указанной разности между запрашиваемыми скоростями хода указанного правого ходового средства и указанного левого ходового средства.
Система может содержать:
- средства, выполненные с возможностью сравнения указанной разности запрашиваемых скоростей хода указанного правого ходового средства и указанного левого ходового средства с заданной пороговой величиной; и
- средства, выполненные с возможностью определения подходящей передачи, если указанная разность превышает указанную пороговую величину.
Система может содержать:
- средства, выполненные с возможностью определения запрашиваемых скоростей хода указанного правого ходового средства и указанного левого ходового средства;
- средства, выполненные с возможностью исходного определения указанной разности только в том случае, если указанная, по меньшей мере, одна запрашиваемая скорость хода превышает заданную пороговую величину.
Система может содержать:
- средства, выполненные с возможностью определения запрашиваемых скоростей хода указанного правого ходового средства и указанного левого ходового средства и автоматического переключения указанной передачи на передачу, более низкую, чем текущая передача, когда запрашиваемые скорости хода относятся к противоположным направлениям для указанного правого ходового средства и указанного левого ходового средства.
Указанное исполнительное средство, выполненное с возможностью запрашивания скорости хода, может содержать два отдельных так называемых «подрулевых лепестка» для переключения передач, один для указанного правого ходового средства и один для указанного левого ходового средства.
Указанное исполнительное средство, выполненное с возможностью запрашивания скорости хода, может содержать средство рулевого управления, например, такое как рулевое колесо или так называемый джойстик, и отдельное средство ускорения.
Указанное исполнительное средство, выполненное с возможностью запрашивания скорости хода, может содержать только одну ручку для управления направлением движения самоходного бурового агрегата.
Указанная трансмиссия может содержать систему обеспечения движения для гидравлического управления и приведения в действие указанных ходовых средств.
В соответствии с одним аспектом настоящего изобретения разработан самоходный буровой агрегат, содержащий систему управления движением самоходного бурового агрегата. В соответствии с одним аспектом настоящего изобретения разработан самоходный буровой агрегат, содержащий систему по любому из пунктов 9-19 формулы изобретения. Указанный самоходный буровой агрегат может быть предназначен для использования на поверхности земли.
В соответствии с одним аспектом настоящего изобретения разработан автономный самоходный буровой агрегат, содержащий автоматизированную систему управления движением указанного самоходного бурового агрегата. В соответствии с одним аспектом настоящего изобретения разработан автономный самоходный буровой агрегат, содержащий систему по любому из пунктов 9-19 формулы изобретения. Указанный автономный самоходный буровой агрегат может быть предназначен для использования на поверхности земли.
В соответствии с одним аспектом настоящего изобретения разработано транспортное средство, оснащенное трансмиссией и двумя гусеничными лентами для обеспечения движения указанного транспортного средства, при этом указанное транспортное средство оснащено системой управления движением указанного транспортного средства. Указанное транспортное средство может представлять собой произвольное соответствующее транспортное средство. Указанное транспортное средство может представлять собой врубовую машину/горный комбайн, тягач/трактор, самосвал, колесный погрузчик, платформу, содержащую промышленный робот, машину для лесоразработок, землеройную машину, строительную машину для укладки асфальта, машину для планировки грунта или гусеничное транспортное средство.
В соответствии с одним аспектом настоящего изобретения разработано автономное транспортное средство, оснащенное трансмиссией и двумя гусеничными лентами для обеспечения движения указанного автономного транспортного средства, при этом указанное транспортное средство оснащено системой управления движением указанного автономного транспортного средства. Указанное автономное транспортное средство может представлять собой произвольное соответствующее автономное транспортное средство. Указанное автономное транспортное средство может представлять собой врубовую машину/горный комбайн, тягач/трактор, самосвал, платформу, содержащую промышленный робот, машину для лесоразработок или гусеничное транспортное средство.
В соответствии с одним аспектом настоящего изобретения разработана компьютерная программа для управления движением самоходного бурового агрегата, при этом указанная компьютерная программа содержит программный код для обеспечения выполнения электронным блоком управления или компьютером, соединенным с электронным блоком управления, этапов в соответствии с любым из пунктов 1-8 формулы изобретения.
В соответствии с одним аспектом настоящего изобретения разработан компьютерный программный продукт, содержащий программный код, хранимый на машиночитаемом носителе, посредством машиночитаемого носителя, для выполнения этапов способа в соответствии с любым из пунктов 1-8 формулы изобретения, когда указанный программный код выполняется в электронном блоке управления или в компьютере, соединенном с электронным блоком управления.
В соответствии с одним аспектом настоящего изобретения разработана компьютерная программа для управления движением самоходного бурового агрегата, при этом указанная компьютерная программа содержит программный код для обеспечения выполнения электронным блоком управления или компьютером, соединенным с электронным блоком управления, этапов по любому из пунктов 1-8 формулы изобретения, когда указанный программный код выполняется в указанном электронном блоке управления или указанном другом компьютере.
В соответствии с одним аспектом настоящего изобретения разработана компьютерная программа для управления движением самоходного бурового агрегата, при этом указанная компьютерная программа содержит программный код, хранимый на машиночитаемом носителе, посредством машиночитаемого носителя, для обеспечения выполнения электронным блоком управления или компьютером, соединенным с электронным блоком управления, этапов в соответствии с любым из пунктов 1-8 формулы изобретения.
В соответствии с одним аспектом настоящего изобретения разработан компьютерный программный продукт, содержащий программный продукт, содержащий программный код, хранимый на машиночитаемом носителе, посредством машиночитаемого носителя, для выполнения способов в соответствии с любым из пунктов 1-8 формулы изобретения, когда указанный программный код выполняется в электронном блоке управления или компьютере, соединенном с электронным блоком управления.
В соответствии с одним аспектом настоящего изобретения разработан компьютерный программный продукт, содержащий программный код, хранимый на энергонезависимом машиночитаемом носителе, посредством энергонезависимого машиночитаемого носителя, для выполнения этапов в соответствии с любым из пунктов 1-8 формулы изобретения, когда указанный программный код выполняется в электронном блоке управления или компьютере, соединенном с электронным блоком управления.
Дополнительные задачи, преимущества и новые признаки настоящего изобретения станут очевидными для специалиста в данной области техники из нижеприведенных подробностей, а также при применении изобретения. Несмотря на то, что изобретение описано ниже, следует отметить, что оно не ограничено конкретными описанными деталями. Для специалиста в данной области техники, который имеет доступ к идеям, изложенным в данном документе, будут понятны дополнительные применения, модификации и внедрения в других областях, которые находятся в пределах объема изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания настоящего изобретения и его дополнительных задач и преимуществ подробное описание, приведенное ниже, следует читать совместно с сопровождающими чертежами, на которых одни и те же ссылочные позиции обозначают аналогичные объекты на различных схемах и в которых:
фиг.1а схематически иллюстрирует самоходный буровой агрегат;
фиг.1b схематически иллюстрирует самоходный буровой агрегат;
фиг.2 схематически иллюстрирует подсистему самоходного бурового агрегата, который показан на фиг.1, в соответствии с одним вариантом осуществления изобретения;
фиг.3 схематически иллюстрирует подсистему самоходного бурового агрегата, который показан на фиг.1, в соответствии с одним аспектом изобретения;
фиг.4а схематически иллюстрирует схему последовательности операций способа в соответствии с одним аспектом изобретения;
фиг.4b схематически иллюстрирует более подробно схему последовательности операций способа в соответствии с одним аспектом изобретения; и
фиг.5 схематически иллюстрирует компьютер в соответствии с одним аспектом изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
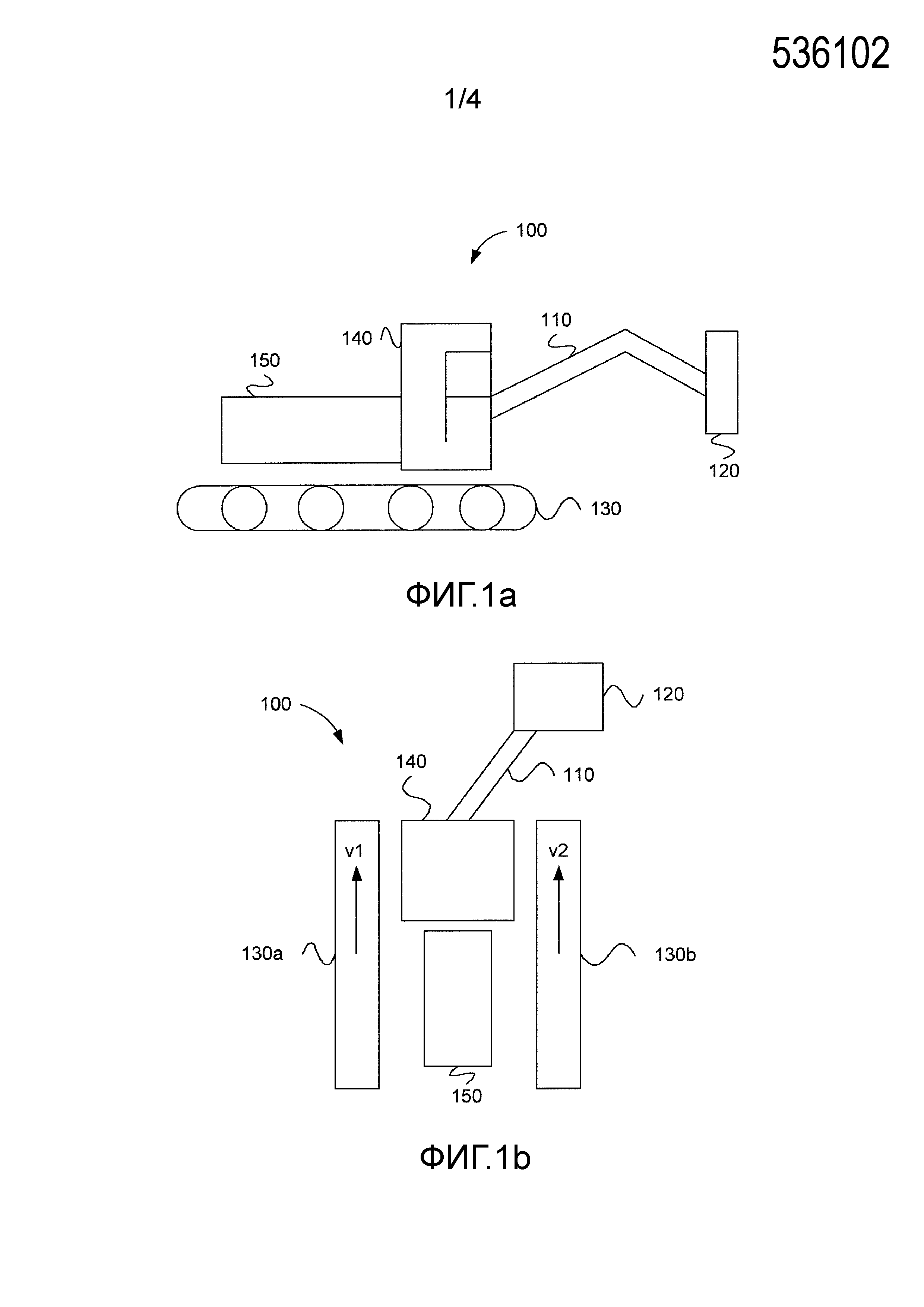
На фиг.1а проиллюстрирован вид сбоку самоходного бурового агрегата 100, который может быть использован для различных видов земляных работ и/или строительных работ и для которого может быть использовано настоящее изобретение. Самоходный буровой агрегат 100 может быть приспособлен для добычи полезных ископаемых. Самоходный буровой агрегат может быть приспособлен для разработки открытым способом. При этом самоходный буровой агрегат 100 может быть адаптирован для выполнения так называемого ударного бурения.
Самоходный буровой агрегат 100 в соответствии с одним вариантом осуществления выполнен с возможностью его эксплуатации в открытых карьерах. Самоходный буровой агрегат 100 в соответствии с одним примером выполнен с возможностью его применения при работах по созданию инфраструктуры. Самоходный буровой агрегат 100 может иметь любые соответствующие размеры и может иметь массу в пределах интервала, например, от 3 до 30 тонн (от 3000 до 30000 килограммов).
Указанный самоходный буровой агрегат 100 содержит среди прочих элементов удлиненную подвижную руку 110, имеющую бурильное устройство 120, расположенное на одном ее конце, гусеничные ленты 130 для обеспечения движения самоходного бурового агрегата 100, кабину 140 для оператора и моторный отсек 150. Указанная подвижная рука 110 также может быть названа шарнирно-сочлененной рукой.
Указанная шарнирно-сочлененная рука может быть выполнена с возможностью разгибания так, что она достигает почти горизонтальной ориентации. Указанная шарнирно-сочлененная рука может быть выполнена с возможностью сгибания или складывания. Данное сгибание или складывание в одном варианте осуществления может обеспечить возможность того, что первая часть шарнирно-сочлененной руки, которая является ближайшей к моторному отсеку 150, и вторая часть шарнирно-сочлененной руки, которая является ближайшей к бурильному устройству 120, будут почти параллельными и почти вертикальными.
В указанном моторном отсеке 150 размещены различные компоненты, а также системы для обеспечения удовлетворительного функционирования указанного самоходного бурового агрегата 100, например, такие как двигатель 230, который выполнен с возможностью сообщения необходимой мощности указанному самоходному буровому агрегату 100. Таким образом, указанный двигатель 230 может быть использован для хода/движения указанного самоходного бурового агрегата 100, перемещения указанной удлиненной руки 110 и для работы указанного бурильного устройства 120. В соответствии с альтернативным вариантом осуществления указанный двигатель 230 используется для обеспечения движения указанного самоходного бурового агрегата 100, при этом отдельное средство обеспечения мощности (непоказанное) используется для работы указанной удлиненной руки 110 и указанного бурильного устройства 120. При этом модуль, который образован указанным моторным отсеком 150, указанной кабиной 140 и гусеничными лентами 130, может быть назван ходовой частью.
Указанный моторный отсек 150 также может содержать соответствующую трансмиссию (непоказанную) для передачи мощности от указанного двигателя 230 указанным гусеничным лентам 130. Указанная трансмиссия может представлять собой, например, механическую трансмиссию с электронным управлением. В соответствии с приведенным в качестве примера вариантом осуществления указанная трансмиссия представляет собой гидравлическую трансмиссию.
В данном документе термин «линия связи» относится к линии связи, которая может представлять собой материальный провод, такой как провод оптоэлектронной связи, или нематериальный «провод», такой как беспроводное соединение, например, линия радиосвязи или линия СВЧ-связи.
В данном документе термин «канал» относится к каналу для удерживания и перемещения текучей среды, например, такой как рабочая жидкость для гидравлических систем. Канал может представлять собой трубу соответствующих размеров. Канал может состоять из произвольного подходящего материала, такого как пластик, резина или металл.
Следует отметить, что изобретение пригодно для применения в произвольном соответствующем транспортном средстве или другой платформе и не ограничено системами самоходного бурового агрегата. Способ по изобретению и система по изобретению также могут быть использованы для платформ, отличающихся от самоходных буровых агрегатов, содержащих трансмиссию и, по меньшей мере, две гусеничные ленты для движения, таких как транспортные средства для горных работ, тягачи/тракторы, самосвалы, транспортные средства/платформы для промышленных роботов, машины для лесоразработок, гусеничные транспортные средства, строительные транспортные средства, транспортные средства общего назначения, транспортные средства повышенной проходимости или транспортные средства военного назначения.
В данном документе термин «подходящий, пригодный» среди прочего может быть интерпретирован как «произвольно подходящий» или «соответствующий релевантному аспекту изобретения».
На фиг.1b указанный самоходный буровой агрегат 100 показан на виде сверху.
При этом указанные гусеничные ленты 130, которые проиллюстрированы на фиг.1, проиллюстрированы более подробно. Указанные гусеничные ленты 130 содержат первое ходовое средство 130а и второе ходовое средство 130b.
При этом проиллюстрировано указанное первое ходовое средство 130а, содержащее первую гусеничную ленту. Указанное «первое ходовое средство 130а» в данном документе также названо «левым ходовым средством 130а». Указанное первое ходовое средство 130а содержит, по меньшей мере, одно ведущее колесо (непоказанное) в указанной трансмиссии для приведения в движение указанной первой гусеничной ленты.
При этом проиллюстрировано указанное второе ходовое средство 130b, содержащее вторую гусеничную ленту. Указанное «второе ходовое средство 130b» в данном документе также названо «правым ходовым средством 130b». Указанное второе ходовое средство 130b содержит, по меньшей мере, одно ведущее колесо (непоказанное) в указанной трансмиссии для приведения в движение указанной второй гусеничной ленты.
Самоходный буровой агрегат 100 выполнен с возможностью управления им посредством так называемого управления гусеничными лентами. При этом соответствующие скорости указанного первого ходового средства 130а и указанного второго ходового средства 130b можно регулировать взаимно независимо. Таким образом, может быть обеспечен поворот самоходного бурового агрегата 100 посредством использования разных скоростей указанного первого ходового средства 130а и указанного второго ходового средства 130b. При этом следует отметить, что указанное первое ходовое средство 130а и указанное второе ходовое средство 130b могут быть образованы произвольным соответствующим способом, например, посредством гусеничных лент и/или колес. Важным обстоятельством в соответствии с настоящим изобретением является то, что самоходный буровой агрегат 100 может быть повернут посредством принципа управления гусеничными лентами, при котором регулирование скорости указанного первого ходового средства 130а и указанного второго ходового средства 130b используется для управления изменениями направления самоходного бурового агрегата 100.
При этом проиллюстрировано, что указанное первое ходовое средство 130а имеет первую скорость v1, и указанное второе ходовое средство 130b имеет вторую скорость v2. В соответствии с данным примером v1 и v2 по существу равны, в результате чего самоходный буровой агрегат приводится в движение в прямолинейном направлении. При этом проиллюстрированы запрашиваемые скорости v1 и v2. Данные запрашиваемые скорости v1 и v2 необязательно должны быть равными соответствующим фактическим скоростям указанного первого ходового средства 130а и указанного второго ходового средства 130b. При этом для простоты в соответствии с данным примером предполагается, что указанные запрашиваемые скорости в равной степени являются такими большими, как указанные соответствующие запрашиваемые скорости.
В том случае, когда указанная первая скорость v1 превышает указанную вторую скорость v2, обеспечивается поворот самоходного бурового агрегата 100 вправо. Аналогичным образом, в том случае, когда указанная первая скорость v1 меньше указанной второй скорости v2, может быть обеспечен поворот самоходного бурового агрегата 100 влево. Соответствующее с очевидностью справедливо для движения самоходного бурового агрегата 100 в направлении назад. При данном направлении назад v1 и v2 имеют направления, противоположные по отношению к направлениям, которые показаны на фиг.1b. При направлении движения самоходного бурового агрегата 100 назад v1 и v2 имеют отрицательные знаки.
Следует отметить, что поворот самоходного бурового агрегата 100 посредством управления гусеничными лентами может быть выполнен за счет того, что одно из указанного первого ходового средства 130а и указанного второго ходового средства 130b стоит на месте, при этом расположенное напротив, ходовое средство имеет скорость, отличную от нуля. Поворот самоходного бурового агрегата 100 посредством управления гусеничными лентами может быть, например, выполнен, когда v1 равна нулю (указанное первое ходовое средство 130а стоит на месте), в то время как v2 отличается от нуля (указанное второе ходовое средство 130b приводится в движение в направлении вперед или в направлении назад).
Следует отметить, что поворот самоходного бурового агрегата 100 вокруг его собственной оси может быть выполнен посредством управления гусеничными лентами за счет того, что указанное первое ходовое средство 130а и указанное второе ходовое средство 130b обеспечивают скорости, имеющие по существу одинаковую величину, которая отлична от нуля, при этом указанные скорости имеют противоположные направления. При этом v1=-v2.
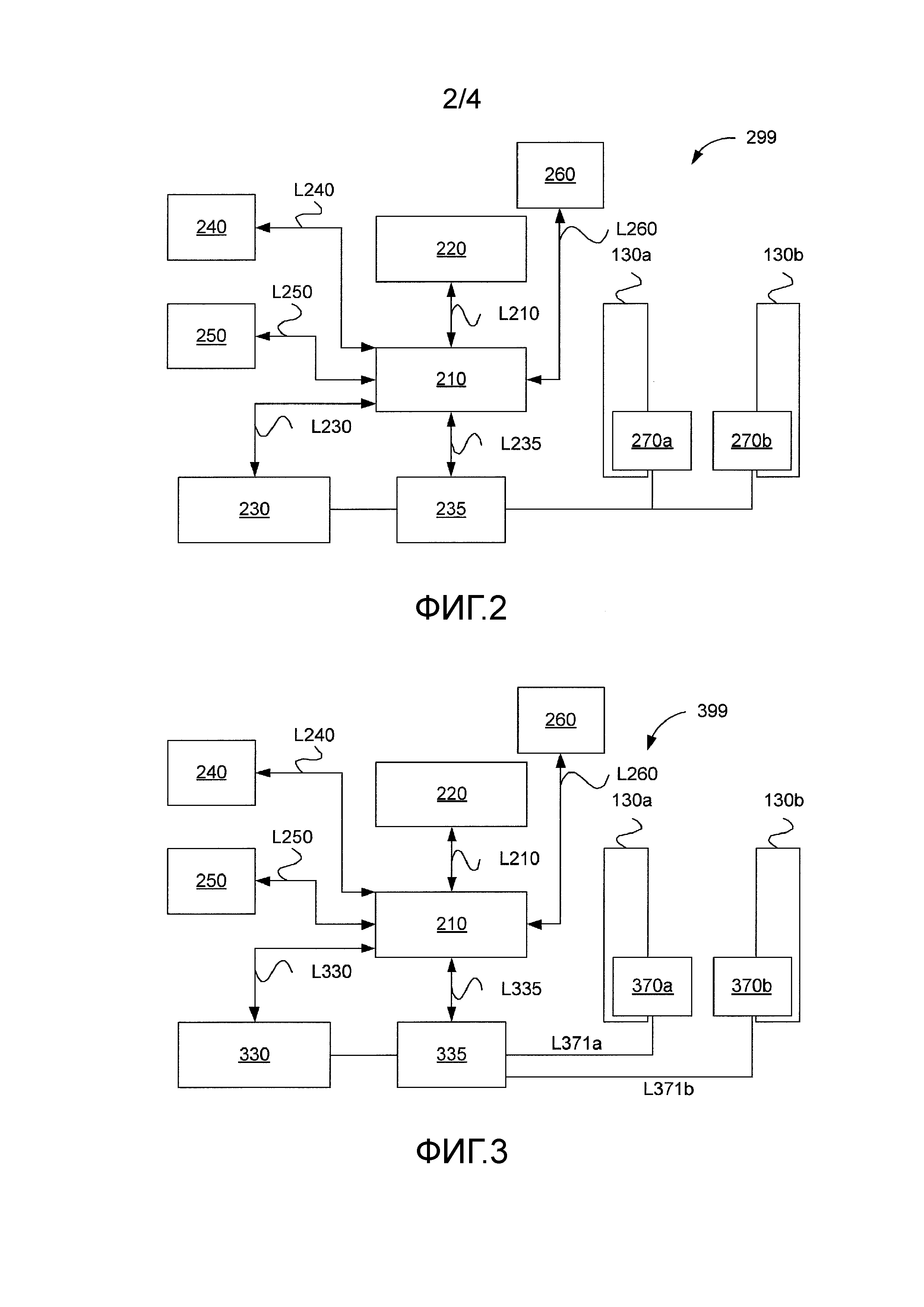
Фиг.2 схематически иллюстрирует подсистему 299 указанного самоходного бурового агрегата 100 в соответствии с одним аспектом настоящего изобретения.
Первое устройство 210 управления выполнено с возможностью осуществления связи с двигательным устройством 230 посредством второй линии L230 связи. Первое устройство 210 управления выполнено с возможностью управления работой указанного двигательного устройства 230. Указанное двигательное устройство 230 может содержать любой пригодный двигатель. Указанное двигательное устройство 230 в соответствии с одним приведенным в качестве примера вариантом осуществления может содержать двигатель внутреннего сгорания, например, дизельный двигатель. Указанное двигательное устройство 230 в соответствии с одним приведенным в качестве примера вариантом осуществления может содержать электродвигатель. Управление работой указанного двигательного устройства 230 может, например, включать регулирование скорости/числа оборотов двигателя и/или крутящего момента на выходном валу.
В соответствии с одним приведенным в качестве примера вариантом осуществления указанный самоходный буровой агрегат 100 может быть снабжен двигательным устройством 230, выполненным с возможностью приведения в движение указанной первой гусеничной ленты 130а и указанной второй гусеничной ленты 130b посредством гибридной операции, при которой используются двигатель внутреннего сгорания, средство аккумулирования энергии, а также электрическая машина.
Указанное двигательное устройство 230 выполнено с возможностью передачи крутящего момента, генерируемого двигателем 230, посредством трансмиссии указанному правому ходовому средству 230а и/или указанному левому ходовому средству 130b. Указанная трансмиссия может содержать коробку 235 передач. Указанное устройство 210 управления выполнено с возможностью осуществления связи с указанной коробкой 235 передач посредством пятой линии L235 связи.
Указанная коробка 235 передач в указанной трансмиссии может содержать соответствующее число ступеней передач. Каждая из данных ступеней передач в данном документе названа передачей. В соответствии с одним вариантом осуществления указанная коробка передач может обеспечивать отдельные передачи для указанной первой гусеничной ленты 130а и указанной второй гусеничной ленты 130b.
Первое устройство 210 управления выполнено с возможностью управления указанной трансмиссией, содержащей указанную коробку 235 передач, например, путем изменения передаточного числа указанной трансмиссии соответствующим образом за счет активного переключения передач. Это может быть выполнено путем переключения текущей передачи из указанной коробки 235 передач.
В соответствии с одним приведенным в качестве примера вариантом осуществления указанная коробка 235 передач обеспечивает две передачи, а именно первую передачу GS1 и вторую передачу GS2. Указанная первая передача GS1 обеспечивает более низкую передачу и обеспечивает сравнительно медленную максимальную скорость хода и сравнительно большую движущую силу/сильную тягу. Указанная вторая передача GS2 обеспечивает более высокую передачу и обеспечивает сравнительно высокую максимальную скорость хода и сравнительно малую движущую силу/слабую тягу.
Соответствующим образом, трансмиссия, имеющее некоторое число отдельных ступеней передач, может обеспечивать последовательность ступеней передач от самой низкой передачи с самой большой движущей силой/самой сильной тягой до самой высокой передачи с самой малой движущей силой/самой слабой тягой. Указанная трансмиссия может, например, обеспечить 2, 3, 4, 5, 6, 10 или 12 отдельных разных ступеней передач. Данные отдельные разные ступени передач в данном документе названы передачами.
При этом указанная трансмиссия указанного самоходного бурового агрегата 100 обеспечивает крутящий момент на выходе в первом приводном блоке 270а указанного первого ходового средства 130а и во втором приводном блоке 270b указанного второго ходового средства 130b. При этом указанный первый приводной блок 270а и указанный второй приводной блок 270b выполнены с возможностью регулирования передачи вращающего момента соответственно указанному первому ходовому средству 130а и указанному второму ходовому средству 130b. Это может быть выполнено посредством управления, осуществляемого первым устройством 210 управления. При этом регулирование скоростей указанного первого ходового средства 130а и указанного второго ходового средства 130b может осуществляться взаимно независимо, в результате чего указанный самоходный буровой агрегат 100 обеспечивает так называемую функциональность, заключающуюся в подтормаживании ходовыми средствами одного борта. Указанный первый приводной блок 270а и указанный второй приводной блок 270b могут быть образованы любым соответствующим способом. При этом, таким образом, отсутствует какая-либо необходимость в регулировании, то есть отсутствует необходимость в так называемом «регулировании с обратной связью». Достаточно управление/регулирование без обратной связи, которое обеспечивает простую систему меньшей сложности.
В соответствии с одним приведенным в качестве примера вариантом осуществления разработан вариатор указанного самоходного бурового агрегата 100. При этом линия передачи мощности в указанном самоходном буровом агрегате 100 содержит указанное двигательное устройство 230 и указанную трансмиссию, содержащую указанную коробку 235 передач.
Первое устройство 210 управления выполнено с возможностью осуществления связи с первым исполнительным средством 240 посредством третьей линии L240 связи. Указанное первое исполнительное средство 240 выполнено с возможностью запрашивания скорости хода указанного самоходного бурового агрегата 100. Указанное исполнительное средство 240 также выполнено с возможностью запрашивания направления движения указанного самоходного бурового агрегата 100.
В соответствии с первым приведенным в качестве примера вариантом осуществления указанное исполнительное средство 240 содержит два «подрулевых лепестка». При этом первый «подрулевой лепесток» выполнен с возможностью запрашивания первой скорости v1 указанного первого ходового средства 130а. При этом второй «подрулевой лепесток» выполнен с возможностью запрашивания второй скорости v2 указанного второго ходового средства 130b.
При этом оператор может использовать указанные «подрулевые лепестки» для управления движением самоходного бурового агрегата 100 как в отношении скорости хода, так и в отношении изменений направлений (посредством управления гусеничными лентами).
При этом указанное первое исполнительное средство 240 выполнено с возможностью непрерывной передачи первого сигнала s1, содержащего информацию о запрашиваемой скорости v1 указанного первого ходового средства 130а, первому устройству 210 управления посредством линии L240 связи. При этом указанное первое исполнительное средство 240 выполнено с возможностью непрерывной передачи второго сигнала s2, содержащего информацию о запрашиваемой скорости v2 указанного второго ходового средства 130b, первому устройству 210 управления посредством третьей линии L240 связи.
В соответствии с альтернативным, вторым приведенным в качестве примера вариантом осуществления указанное первое исполнительное средство 240 содержит первое модуль и второй модуль. При этом указанный первый модуль может содержать рулевое колесо или джойстик, или любое другое соответствующее устройство для управления направлением движения указанного самоходного бурового агрегата 100. При этом указанный второй модуль может содержать приводное средство акселератора. Указанное приводное средство акселератора в соответствии с одним вариантом осуществления может содержать педаль акселератора. При этом указанный второй модуль может быть использован для запрашивания ускорения и, следовательно, требуемой скорости хода указанного самоходного бурового агрегата 100. При этом первое устройство 210 управления выполнено с возможностью управления движением указанного самоходного бурового агрегата посредством управления указанной трансмиссией и указанным первым приводным блоком 270а и указанным вторым приводным блоком 270b соответствующим образом.
Первое устройство 210 управления выполнено с возможностью непрерывного определения запрашиваемой скорости v1 указанного первого ходового средства 130а и запрашиваемой скорости v2 указанного второго ходового средства 130b. Это может выполняться на основе сигналов, получаемых от указанного первого исполнительного средства 240. Данные сигналы могут содержать информацию о запрашиваемом направлении движения и запрашиваемой скорости хода самоходного бурового агрегата 100. При этом первое устройство 210 управления выполнено с возможностью определения двух соответствующих скоростей v1 и v2 для управления подсистемой 299 соответствующим образом.
В соответствии с одним аспектом настоящего изобретения некоторое число этапов сравнения выполняется первым устройством 210 управления.
На первом этапе сравнения определяют, превышает ли указанная запрашиваемая скорость v1 указанного первого ходового средства 130а первую заданную пороговую величину Th1.
При этом определяют, выполняется ли условие ⏐v1⏐≥Th1.
На втором этапе сравнения определяют, превышает ли указанная запрашиваемая скорость v2 указанного второго ходового средства 130b вторую заданную пороговую величину Th2.
При этом определяют, выполняется ли условие ⏐v2⏐≥Th2.
Указанная первая пороговая величина Th1 и указанная вторая пороговая величина Th2 могут представляет собой произвольные соответствующие пороговые величины. В соответствии с одним примером указанная первая пороговая величина Th1=1,0 м/с и указанная вторая пороговая величина Th2=1,0 м/с.
В соответствии с приведенным в качестве примера вариантом осуществления указанная первая пороговая величина Th1 и указанная вторая пороговая величина Th2 могут быть выражены в процентах (%) и могут составлять по величине 10% от максимальной запрашиваемой скорости хода самоходного бурового агрегата 100.
На третьем этапе сравнения определяют, превышает ли абсолютная величина разности Diff указанной первой запрашиваемой скорости v1 хода и указанной второй запрашиваемой скорости v2 хода заданную третью пороговую величину Th3.
Это определяется посредством проверки выполнения условия ⏐v1 - v2⏐≥Th3.
В соответствии с альтернативным вариантом осуществления указанный третий этап сравнения может включать определения того, превышает ли заданная четвертая пороговая величина Th4 соотношение между указанной первой запрашиваемой скоростью v1 и указанной второй запрашиваемой скоростью v2. Указанная четвертая пороговая величина может представлять собой произвольную соответствующую величину.
При этом определяют, выполняется ли условие .
В альтернативном варианте определяют, выполняется ли условие , в том случае, если v1 превышает v2.
Деление на ноль не выполняется.
При этом показано, что указанные этапы сравнения включают использование величин указанной первой запрашиваемой скорости v1 и указанной второй запрашиваемой скорости v2. Альтернативное действие состоит в использовании первого сигнала S1, содержащего информацию об указанной первой запрашиваемой скорости v1, и второго сигнала S2, содержащего информацию об указанной второй запрашиваемой скорости v2. При этом указанные сигналы могут быть получены в соответствии с изобретением аналогично тому, что описано выше.
В соответствии с приведенным в качестве примера вариантом осуществления указанное первое устройство 210 управления может быть выполнено с возможностью сравнения соотношения v1 и v2 или соотношения v2 и v1 с некоторым числом заданным пороговых величин. В качестве примера предусмотрено единственное значение пороговой величины для каждой передачи указанной трансмиссии, при этом указанное единственное значение пороговой величины поставлено в соответствие соответствующей передаче. При этом первое устройство 210 управления может быть выполнено с возможностью определения того, какая передача должна быть выбрана, на основе указанных сравнений.
В соответствии с приведенным в качестве примера вариантом осуществления указанное первое устройство 210 управления может быть выполнено с возможностью сравнения разности v1 и v2 или разности v2 и v1 с некоторым числом заданных пороговых величин. В качестве примера предусмотрено единственное значение пороговой величины для каждой передачи указанной трансмиссии, при этом каждое единственное значение пороговой величины поставлено в соответствие соответствующей передаче. При этом первое устройство 210 управления может быть выполнено с возможностью определения того, какая передача должна быть выбрана, на основе указанных сравнений.
Первое устройство 210 управления выполнено с возможностью непрерывного определения запрашиваемой первой скорости v1 хода указанного первого ходового средства 130а. Первое устройство 210 управления выполнено с возможностью непрерывного определения запрашиваемой второй скорости v2 хода указанного второго ходового средства 130b.
Первое устройство 210 управления выполнено с возможностью непрерывного определения того, превышает ли указанная первая скорость v1 хода указанную первую пороговую величину Th1. Первое устройство 210 управления выполнено с возможностью непрерывного определения того, превышает ли указанная запрашиваемая вторая скорость v2 хода указанную вторую пороговую величину Th2.
Первое устройство 210 управления выполнено с возможностью непрерывного определения указанной разности Diff указанной запрашиваемой первой скорости v1 хода указанного первого ходового средства 130а и указанной запрашиваемой второй скорости v2 хода указанного второго ходового средства 130b.
В соответствии с приведенным в качестве примера вариантом осуществления первое устройство 210 управления выполнено с возможностью определения указанной разности Diff только в том случае, когда, по меньшей мере, одна из указанной первой запрашиваемой скорости v1 хода и указанной второй запрашиваемой скорости v2 хода превышает соответствующую ей, пороговую величину Th1 и Th2.
В соответствии с приведенным в качестве примера вариантом осуществления первое устройство 210 управления выполнено с возможностью определения указанной разности Diff только в том случае, если как указанная первая запрашиваемая скорость v1 хода, так и указанная вторая запрашиваемая скорость v2 хода соответственно превышают соответствующие им, пороговые величины Th1 и Th2.
Первое устройство 210 управления выполнено с возможностью осуществления связи со вторым исполнительным средством 250 посредством четвертой линии L250 связи. Указанное второе исполнительное средство 250 содержит средство для выбора передачи трансмиссии самоходного бурового агрегата. При этом оператор может использовать указанное второе исполнительное средство 250 для выбора передачи из указанной коробки 235 передач.
Указанное первое устройство 210 управления может быть выполнено с возможностью осуществления связи со средством 260 представления/извещения посредством шестой линии L260 связи. Указанное средство 260 представления может быть предусмотрено в указанной кабине 140. Указанное средство 260 представления может содержать экран для представления, например, сенсорный экран. При этом указанное первое устройство 210 управления может быть выполнено с возможностью представления буквенно-цифровых знаков и/или символов, относящихся к управлению движением указанного самоходного бурового агрегата 100. В частности, указанное первое устройство 210 управления может быть выполнено с возможностью представления информации, относящейся к переключениям с текущей передачи указанной трансмиссии.
Указанное средство 260 представления может содержать средства для звукового и/или тактильного и/или визуального представления информации/команд/рекомендаций, относящихся к переключению текущей передачи указанной трансмиссии в соответствии со способом по изобретению.
Указанное первое устройство 210 управления может быть выполнено с возможностью - в тех случаях, когда это применимо, - представления информации, содержащей команды на изменение/переключение передачи указанной трансмиссии. Таким образом, указанная информация может быть представлена соответствующим образом посредством указанного средства 260 представления.
Указанное первое устройство 210 управления может быть выполнено с возможностью определения разности запрашиваемой скорости хода указанного правого ходового средства и запрашиваемой скорости хода указанного левого ходового средства. Указанное первое устройство 210 управления может быть выполнено с возможностью определения подходящей передачи указанной трансмиссии на основе разности, определенной таким образом.
Указанное первое устройство 210 управления может быть выполнено с возможностью приведения указанного самоходного бурового агрегата в движение посредством гусеничных лент или колес, при этом поворот указанного самоходного бурового агрегата обеспечивается посредством приведения указанного правого ходового средства и указанного левого ходового средства в движение с разными скоростями.
Указанное первое устройство 210 управления может быть выполнено с возможностью - при определенной подходящей передаче, более низкой, чем текущая передача, - автоматического переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу.
Указанное первое устройство 210 управления может быть выполнено с возможностью - при определенной подходящей передаче, более низкой, чем текущая передача, - извещения оператора посредством указанного средства 260 представления о необходимости переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу, в результате чего указанный оператор может выбрать ручное переключение передачи.
Указанное первое устройство 210 управления может быть выполнено с возможностью сравнения указанной разности запрашиваемых скоростей хода указанных правого ходового средства и левого ходового средства с заданной пороговой величиной, при этом подходящую передачу определяют, когда указанная разность превышает указанную пороговую величину.
Указанное первое устройство 210 управления может быть выполнено с возможностью определения запрашиваемых скоростей хода для указанных правого ходового средства и левого ходового средства, при этом указанную разность определяют, когда, по меньшей мере, одна определенная скорость хода превышает заданную пороговую величину.
Указанное первое устройство 210 управления может быть выполнено с возможностью определения запрашиваемых скоростей хода для указанных правого ходового средства и левого ходового средства, при этом указанная передача автоматически переключается на передачу, более низкую, чем текущая передача, в том случае, если указанные запрашиваемые скорости хода соответствуют противоположным направлениям указанных правого ходового средства и левого ходового средства.
Второе устройство 220 управления выполнено с возможностью осуществления связи с первым устройством 210 управления посредством первой линии L210 связи. Второе устройство 220 управления может быть соединено с первым устройством 210 управления с возможностью отсоединения. Второе устройство 220 управления может представлять собой внешнее устройство управления самоходного бурового агрегата 100. Второе устройство 220 управления может быть выполнено с возможностью выполнения этапов способа по изобретению. Второе устройство 220 управления может быть использовано для передачи программного кода первому устройству 210 управления, в частности, программного кода для выполнения способа по изобретению. В качестве альтернативы второе устройство 220 управления может быть выполнено с возможностью осуществления связи с первым устройством 210 управления посредством внутренней сети транспортного средства. Второе устройство 220 управления может быть выполнено с возможностью выполнения функций, по существу аналогичных функциям первого устройства 210 управления.
Фиг.3 схематически иллюстрирует подсистему 399 самоходного бурового агрегата 100 в соответствии с приведенным в качестве примера вариантом осуществления настоящего изобретения.
Следует отметить, что настоящее изобретение может быть применено для различных видов систем приводов и систем трансмиссий самоходного бурового агрегата гусеничного типа.
В соответствии с приведенным в качестве примера вариантом осуществления подсистема 399 содержит гидравлическую систему с гидравлическим насосом 330, который выполнен с возможностью сообщения по текучей среде с клапанным устройством 335.
Первое устройство 210 управления выполнено с возможностью осуществления связи с гидравлическим насосом 330 посредством восьмой линии L330 связи. Первое устройство 210 управления выполнено с возможностью управления работой указанного гидравлического насоса 330.
Первое устройство 210 управления выполнено с возможностью осуществления связи с указанным клапанным устройством 335 посредством седьмой линии L335 связи. Первое устройство 210 управления выполнено с возможностью управления работой указанного клапанного устройства 335.
Клапанное устройство 335 выполнено с возможностью сообщения по текучей среде с первым приводным блоком 370а посредством первого транспортирующего канала 371а. Клапанное устройство 335 выполнено с возможностью сообщения по текучей среде со вторым приводным блоком 370b посредством второго транспортирующего канала 371b.
Первый приводной блок 370а выполнен с возможностью обеспечения движущей силы указанного первого ходового средства 130а. Второй приводной блок 370b выполнен с возможностью обеспечения движущей силы указанного второго ходового средства 130b. Первое устройство 210 управления может быть соединено с указанным первым приводным блоком 370а и указанным вторым приводным блоком 370b с возможностью передачи сигналов. При этом первое устройство 210 управления может быть выполнено с возможностью регулирования скорости хода первого ходового средства 130а и второго ходового средства 130b.
В соответствии с одним аспектом настоящего изобретения регулирование гидравлического давления подсистемы 399 осуществляется таким образом, чтобы обеспечить предпочтительное переключение передачи подсистемы 399. При этом первое устройство 210 управления выполнено с возможностью управления указанным гидравлическим насосом 330, клапанным устройством 335, указанным первым приводным блоком 370а и указанным вторым приводным блоком 370b в соответствии с инновационным способом, применяемым для схематически показанной системы гидравлического привода/системы трансмиссии, которая тем самым включена в подсистему 399. В соответствии с альтернативным вариантом осуществления управление указанным гидравлическим насосом 330 осуществляется не посредством первого устройства 210 управления, а является полностью аналоговым посредством, например, указанного клапанного устройства 335.
Подсистема 399 содержит устройства 240, 250 и 260, которые показаны более подробно, например, со ссылкой на описание фиг.2.
В соответствии с одним аспектом настоящего изобретения указанный самоходный буровой агрегат 100 представляет собой автономный самоходный буровой агрегат. При этом следует отметить, что самоходный буровой агрегат 100 в таком случае оснащен соответствующими сенсорными устройствами и средствами навигации для его использования автономным образом для любого соответствующего применения, например, такого как буровые работы.
В соответствии с приведенным в качестве примера вариантом осуществления система по изобретению и самоходный буровой агрегат по изобретению выполнены с возможностью дистанционного управления ими. При этом оператор может находиться на любом соответствующем расстоянии от самоходного бурового агрегата 100. При этом способ по изобретению может быть применен посредством использования хранимых управляющих программ указанных первого устройства 210 управления и/или второго устройства 220 управления.
Фиг.4а схематически иллюстрирует схему последовательности операций способа управления движением самоходного бурового агрегата, при этом указанный самоходный буровой агрегат содержит правое ходовое средство 130b и левое ходовое средство 130а и устройство взаимно независимого регулирования скорости и трансмиссию для приведения в движение указанного правого ходового средства 130b и указанного левого ходового средства 130а, при этом указанная трансмиссия обеспечивает, по меньшей мере, две передачи. Способ включает первый этап s401 способа. Этап s401 включает этапы:
- запрашивания скорости хода для указанного правого ходового средства 130b и для указанного левого ходового средства 130а;
- определения разности Diff между запрашиваемой скоростью v2 хода указанного правого ходового средства 130b и запрашиваемой скоростью v1 хода указанного левого ходового средства 130а;
- определения подходящей передачи на основе разности Diff, определенной таким образом.
Указанные, по меньшей мере, две передачи в соответствии с одним примером предусмотрены в коробке 235 передач.
После этапа s401 способа способ заканчивается.
Фиг.4b схематически иллюстрирует схему последовательности операций способа управления движением самоходного бурового агрегата 100, при этом указанный самоходный буровой агрегат 100 содержит правое ходовое средство 130b и левое ходовое средство 130а и устройство взаимно независимого регулирования скорости и трансмиссию для приведения в движение указанного правого ходового средства 130b и указанного левого ходового средства 130а, при этом указанная трансмиссия обеспечивает, по меньшей мере, две передачи. Указанная схема последовательности операций представляет собой приведенный в качестве примера вариант осуществления способа управления движением самоходного бурового агрегата 100. Способ включает первый этап s410 способа.
Этап s410 может включать этап непрерывного определения запрашиваемой скорости для движения/хода указанного самоходного бурового агрегата 100. При этом этап s410 включает этап непрерывного определения запрашиваемой скорости v1 указанного первого ходового средства 130а. При этом этап s410 включает этап непрерывного определения запрашиваемой скорости v2 указанного второго ходового средства 130b.
Этап s410 может включать этап непрерывного определения разности Diff между указанной запрашиваемой скоростью v1 указанного первого ходового средства 130а и указанной запрашиваемой скоростью v2 указанного второго ходового средства 130b.
Этап s410 может быть выполнен первым устройством 210 управления с учетом скорости V хода/движения, относящейся к самоходному буровому агрегату 100, с учетом запрашиваемой оператором скорости V хода/движения, относящейся к самоходному буровому агрегату 100. В зависимости от того, какую конфигурацию имеет указанное первое исполнительное средство 240, указанная запрашиваемая скорость v1 первого ходового средства 130а и указанная запрашиваемая скорость v2 указанного второго ходового средства 130b могут быть определены разными способами. Тем не менее, запрашиваемая скорость V хода указанного самоходного бурового агрегата 100 может непрерывно распределяться в виде составляющих для первого ходового средства 130а и указанного второго ходового средства 130b.
После этапа s410 способа выполняется последующий этап s420 способа.
Этап s420 может включать этап определения того, выполняется ли ряд заданных критериев, относящихся к указанному запрашиваемому движению самоходного бурового агрегата 100.
Первый критерий может состоять в том, что указанная первая запрашиваемая скорость v1 хода должна превышать указанную первую пороговую величину Th1. Второй критерий может состоять в том, что указанная вторая скорость v2 хода должна превышать указанную вторую пороговую величину Th2. Третий критерий может состоять в том, что указанная разность Diff указанной первой запрашиваемой скорости v1 хода и указанной второй запрашиваемой скорости v2 хода должна превышать третью пороговую величину Th3. Четвертый критерий может состоять в том, что текущая передача указанной трансмиссия должна отличаться от самой низкой передачи. Другими словами, должна быть обеспечена возможность переключения на понижающую передачу с текущей передачи на более низкую передачу, например, с GS2 на GS1.
В соответствии с одним вариантом осуществления способ может включать этап автоматического переключения на повышающую/более высокую передачу в том случае, если больше не выполняется, по меньшей мере, один критерий для автоматического переключения на понижающую передачу. В соответствии с одним вариантом осуществления способ может включать этап автоматического переключения на повышающую/более высокую передачу в том случае, если не выполняются все указанные критерии для автоматического переключения на понижающую передачу.
В соответствии с одним аспектом настоящего изобретения способ может включать этап автоматического переключения на повышающую подходящую передачу после того, как было выполнено автоматическое переключение на понижающую передачу, и в том случае, если, по меньшей мере, один из указанных критериев больше не выполняется. В соответствии с приведенным в качестве примера вариантом осуществления автоматическое переключение на повышающую передачу может выполняться так, что заданная передача будет включаться после хода событий, включающего указанное автоматическое переключение на понижающую передачу в соответствии с изобретением. Данное автоматическое переключение на повышающую передачу может выполняться при условии, что, по меньшей мере, один из указанных критериев больше не выполняется.
Этап s420 может включать этап определения разности Diff запрашиваемых скоростей хода указанного правого ходового средства и указанного левого ходового средства.
В том случае, если выполняется, по меньшей мере, указанный третий критерий, выполняется последующий этап s430 способа. В другом случае способ возвращается к этапу s410 способа.
В соответствии с приведенным в качестве примера вариантом осуществления все четыре критерия должны выполняться для обеспечения возможности выполнения указанного последующего этапа s430 способа. В другом случае способ возвращается к этапу s410 способа.
Этап s430 может включать этап определения подходящей передачи трансмиссии самоходного бурового агрегата на основе разности Diff, определенной таким образом. Указанная подходящая передача может быть определена на основе величины указанной определенной разности Diff. Это может быть выполнено посредством первого устройства 210 управления.
В соответствии с одним вариантом осуществления разница между текущей передачей и указанной определенной подходящей передачей может быть пропорциональна указанной разности Diff указанной первой запрашиваемой скорости v1 хода и указанной второй запрашиваемой скорости v2 хода. То есть, для сравнительно большой разности Diff может быть определена относительно низкая передача по сравнению с указанной текущей передачей.
После этапа s430 способа выполняется последующий этап s440 способа.
Этап s440 может включать этап оказания воздействия на передачу указанной трансмиссии. Этап s440 может включать этап управления переключением текущей передачи указанной трансмиссии.
Этап s440 может включать этап автоматического переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу при определенной подходящей передаче, более низкой, чем текущая передача.
В соответствии с альтернативным примером этап s440 способа может включать этап извещения оператора о необходимости переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу при определенной подходящей передаче, более низкой, чем текущая передача, в результате чего указанный оператор может выбрать ручное переключение передачи. При этом указанное первое устройство 210 управления может быть использовано для управления представлением информации, относящейся к указанному переключению передачи указанной трансмиссии. При этом этап s440 способа может включать этап представления информации, в связи с которой рекомендуется специфическая определенная передача. Это может быть выполнено посредством аудиовизуальной инструкции/команды для оператора самоходного бурового агрегата 100.
После этапа s440 способа выполняется последующий этап s450 способа.
Этап s450 может включать этап оказания воздействия на передачу указанной трансмиссии в том случае, если это применимо. Этап s450 может включать этап управления переключением текущей передачи указанной трансмиссии в том случае, если это применимо. Это может быть выполнено посредством первого устройства 210 управления.
При этом более низкая передача может быть переключена на предшествующую, более высокую передачу. Это может быть выполнено, когда указанная разность Diff меньше указанной третьей пороговой величины Th3. Это может выполняться после поворота самоходного бурового агрегата 100.
Следует отметить, что способ по изобретению пригоден для автономного самоходного бурового агрегата 100. При этом первое устройство 200 управления может быть выполнено с возможностью автоматического выполнения показанных этапов способа, например, таких как запрашивание первой скорости v1 хода и второй скорости v2 хода, определение разности Diff между указанной первой скоростью v1 хода и указанной второй скоростью v2 хода, определение того, выполняются ли указанные четыре критерия, определение подходящей передачи на основе указанной разности Diff и изменение/переключение указанной передачи. Указанное автоматическое переключение указанной передачи может быть выполнено в виде переключения указанной коробки 235 передач, соответствующего клапанного устройства 335 на понижающую передачу перед поворотом или во время поворота самоходного бурового агрегата 100 и после этого в виде переключения указанной коробки 235 передач, соответствующего клапанного устройства 335 на повышающую передачу во время более поздней части указанного поворота или после указанного поворота самоходного бурового агрегата 100.
После этапа s450 способа способ заканчивается. В альтернативном варианте этап s410 способа выполняется снова.
На фиг.5 проиллюстрирована схема одного варианта осуществления устройства 500. Устройства 210 и 220 управления, показанные со ссылкой на фиг.2, в одном варианте могут содержать устройство 500. Устройство 500 содержит энергонезависимую память 520, блок 510 обработки данных и память 550 с оперативной записью и считыванием. Энергонезависимая память 520 имеет первую часть 530 памяти, в которой хранится компьютерная программа, такая как операционная система, для управления функционированием устройства 500. Устройство 500 дополнительно содержит контроллер, управляющий шиной, последовательный коммуникационный порт, средства ввода/вывода, аналого-цифровой преобразователь, устройство ввода и передачи времени и даты, счетчик числа событий и контроллер прерываний (непоказанные). Энергонезависимая память 520 также имеет вторую часть 540 памяти.
Разработана компьютерная программа Р, содержащая подпрограммы для управления движением самоходного бурового агрегата, при этом указанный самоходный буровой агрегат содержит правое ходовое средство и левое ходовое средство и устройство взаимно независимого регулирования скорости и трансмиссию для приведения в движение указанного правого ходового средства и указанного левого ходового средства, при этом указанная трансмиссия обеспечивает, по меньшей мере, две передачи.
Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения запрашиваемой скорости хода для указанного правого ходового средства. Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения запрашиваемой скорости хода для указанного левого ходового средства.
Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения различия между указанным правым ходовым средством и указанным левым ходовым средством. Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения подходящей передачи на основе определенной таким образом разности запрашиваемых скоростей хода указанного правого ходового средства и указанного левого ходового средства.
Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения разности между указанной определенной запрашиваемой скоростью хода указанного правого ходового средства и указанной определенной запрашиваемой скоростью хода указанного левого ходового средства. Компьютерная программа может содержать подпрограммы для определения подходящей передачи на основе определенной таким образом разности между указанной определенной запрашиваемой скоростью хода указанного правого ходового средства и указанной определенной запрашиваемой скоростью хода указанного левого ходового средства.
Компьютерная программа Р может содержать подпрограммы для приведения в движение указанного самоходного бурового агрегата посредством гусеничных лент или колес, при этом поворот указанного самоходного бурового агрегата обеспечивается посредством приведения указанного правого ходового средства и указанного левого ходового средства в движение с разными скоростями.
Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения текущей передачи трансмиссии самоходного бурового агрегата 100.
Компьютерная программа Р может содержать подпрограммы для непрерывного и/или периодического определения того, является ли целесообразным переключение указанной текущей передачи. Это может быть выполнено на основе определенной таким образом разности между указанной определенной запрашиваемой скоростью хода указанного правого ходового средства и указанной определенной запрашиваемой скоростью хода указанного левого ходового средства.
Компьютерная программа Р может содержать подпрограммы для автоматического переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу при определенной подходящей передаче, более низкой, чем текущая передача.
Компьютерная программа Р может содержать подпрограммы для автоматического переключения передачи с указанной определенной, более низкой передачи на предшествующую, более высокую передачу. Указанная более высокая передача может представлять собой предыдующую, более высокую передачу.
Компьютерная программа Р может содержать подпрограммы для извещения оператора о необходимости переключения передачи с указанной текущей передачи на указанную определенную, более низкую передачу при определенной подходящей передаче, более низкой, чем текущая передача.
Компьютерная программа Р может содержать подпрограммы для сравнения указанной разности указанных запрашиваемых скоростей хода указанного правого ходового средства и указанного левого ходового средства с заданной пороговой величиной. Компьютерная программа Р может содержать подпрограммы для определения подходящей передачи, если указанная разность превышает указанную пороговую величину.
Компьютерная программа Р может содержать подпрограммы для определения запрашиваемой скорости хода для указанного правого ходового средства и указанного левого ходового средства, при этом указанную разность исходно определяют только в том случае, если, по меньшей мере, одна запрашиваемая скорость хода превышает заданную пороговую величину.
Компьютерная программа Р может содержать подпрограммы для определения запрашиваемой скорости хода для указанного правого ходового средства и указанного левого ходового средства, при этом указанная передача автоматически переключается на передачу, более низкую, чем текущая передача, в том случае, когда запрашиваемые скорости хода относятся к противоположным направлениям для указанного правого ходового средства и указанного левого ходового средства.
Компьютерная программа Р может содержать подпрограммы для автоматического переключения передачи на более высокую передачу, чем указанная определенная, более низкая передача, в том случае, если это применимо, после переключения передачи на указанную определенную, более низкую передачу.
Компьютерная программа Р может содержать подпрограммы для представления информации, относящейся к рекомендации по переключению передачи на более высокую передачу, чем указанная определенная, более низкая передача, оператору указанного самоходного бурового агрегата после переключения передачи на указанную определенную, более низкую передачу.
Компьютерная программа Р может храниться в выполнимом виде или в сжатом виде в памяти 560 и/или в памяти 550 с оперативной записью и считыванием.
Когда утверждается, что блок 510 обработки данных выполняет определенную функцию, это означает, что блок 510 обработки данных воздействует на определенную часть программы, хранимой в памяти 560, или определенную часть программы, хранимой в памяти 550 с оперативной записью и считыванием.
Устройство 510 обработки данных может осуществлять связь с портом 599 данных посредством четвертой шины 515 данных. Энергонезависимая память 520 предназначена для осуществления связи с блоком 510 обработки данных посредством второй шины 512 данных. Отдельная память 560 предназначена для осуществления связи с блоком 510 обработки данных посредством первой шины 511 данных. Память 550 с оперативной записью и считыванием предназначена для осуществления связи с блоком 510 обработки данных посредством третьей шины 514 данных. Порт 599 данных может быть соединен, например, с первой линией L210 связи, второй линией L230 связи, третьей линией L240 связи, четвертой линией L250 связи, пятой линией L235 связи, шестой линией L260 связи, седьмой линией L335 связи и восьмой линией L330 связи (см. фиг.2 и фиг.3).
Когда данные принимаются в порте 599 данных, они временно сохраняются во втором запоминающем элементе 540. Когда полученные входные данные будут временно сохранены, блок 510 обработки данных будет готов для осуществления выполнения кода описанным выше образом. В одном варианте сигналы, полученные в порте 599 данных, содержат информацию о запрашиваемой скорости самоходного бурового агрегата 100. В одном варианте сигналы, полученные в порте 599 данных, содержат информацию о запрашиваемой скорости v1 хода указанного первого ходового средства 130а. В одном варианте сигналы, полученные в порте 599 данных, содержат информацию о запрашиваемой скорости v2 хода указанного второго ходового средства 130b. В одном варианте сигналы, полученные в порте 599 данных, содержат информацию о запрашиваемой скорости v1 хода указанного первого ходового средства 130а и запрашиваемой скорости v2 хода указанного второго ходового средства 130b.
Части способов, описанных в данном документе, могут быть применены устройством 500 посредством блока 510 обработки данных, который обеспечивает выполнение программы, хранимой в памяти 560 или в памяти 560 с оперативной записью и считыванием. Когда устройство 500 выполняет программу, выполняются способы, описанные в данном документе.
Вышеизложенное описание предпочтительных вариантов осуществления настоящего изобретения приведено в целях иллюстрации и описания. Оно не предназначено ни для того, чтобы быть исчерпывающим, ни для ограничения изобретения описанными вариантами. Многие модификации и варианты будут очевидными сами по себе для специалиста в данной области техники. Варианты осуществления были выбраны и описаны для того, чтобы наилучшим образом разъяснить принципы изобретения и его практические применения и, следовательно, сделать возможным для специалиста в данной области техники понимание изобретения в различных вариантах осуществления и с различными модификациями, соответствующими намеченному использованию.
Реферат
Группа изобретений относится к способу управления движением самоходного бурового агрегата. Самоходный буровой агрегат содержит правое ходовое средство и левое ходовое средство и устройство взаимно независимого регулирования скорости и трансмиссию для приведения в движение указанных правого ходового средства и левого ходового средства. Трансмиссия обеспечивает, по меньшей мере, две передачи коробки передач. Способ управления включает этапы: запрашивание скорости хода для указанного правого ходового средства и для указанного левого ходового средства; определение разности между запрашиваемыми скоростями хода указанного правого ходового средства и указанного левого ходового средства; определение подходящей передачи на основе разности, определенной таким образом. При этом при определенной подходящей передаче, более низкой, чем текущая передача, осуществляют автоматическое переключение передачи с указанной текущей передачи на указанную определенную более низкую передачу. Обеспечивается упрощение и надежность управления агрегатом. 4 н. и 15 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Электронное устройство управления для привода транспортного средства
Комментарии