Система управления для системы привода/рулевого управления гусеничного транспортного средства - RU2247049C2
Код документа: RU2247049C2
Чертежи


Описание
Данное изобретение относится к системе привода/рулевого управления гусеничного транспортного средства.
Известные выпускаемые в промышленных масштабах гусеничные транспортные средства, такие как гусеничные тракторы “John Deere” моделей 8000Т и 9000Т, содержат насос гидравлического усилителя рулевого управления с переменной производительностью с приводом от двигателя, который приводит в действие гидромотор рулевого управления с постоянной производительностью. Мотор рулевого управления приводит в действие через посредство коленчатого вала и зубчатой передачи левую планетарную передачу. Мотор рулевого управления также приводит в действие через посредство коленчатого вала, зубчатой передачи и шестерни заднего хода - правую планетарную передачу. Сигнал контроля рулевого управления обеспечивают преобразователем, который обнаруживает вращение рулевого колеса. Скорость и направление вращения мотора рулевого управления обычно пропорциональны положению рулевого колеса, и эти параметры определяют датчиком скорости и направления вращения мотора, действие которого основано на эффекте Холла. Некоторые типы отказов, относящихся к насосу гидравлического усилителя рулевого управления, такие как загрязнение в распределительном клапане и неисправность привода обратной связи между качающейся шайбой насоса гидравлического усилителя рулевого управления и ее регулирующими клапанами второй ступени, могут обусловливать гидравлическую блокировку (заедание) качающейся шайбы насоса в некотором ненулевом положении. Этот тип отказа может вызвать непрерывный поворот транспортного средства, даже если рулевое колесо при этом находится в положении, при котором оно не получает команду поворота. Желательно обеспечить способ обнаружения таких отказов и исключения поворота транспортного средства, если на то нет фактической команды оператора.
Соответственно задача данного изобретения заключается в обеспечении системы или способа обнаружения некоторых видов отказа в системе привода/рулевого управления гусеничного транспортного средства.
Другая задача данного изобретения заключается в обеспечении системы, которая исключает поворот транспортного средства, если на то не имеется фактической команды оператора.
Эти и прочие задачи решаются данным изобретением, в соответствии с которым система управления для системы привода/рулевого управления гусеничного транспортного средства содержит блок управления системой рулевого управления, который принимает сигналы от датчика скорости насоса (скорости двигателя) и от датчика скорости мотора рулевого управления. Отношение скорости мотора к скорости насоса характеризует угол качающейся шайбы насоса гидравлического усилителя рулевого управления во время рулевого действия. Для нормального функционирования системы рулевого управления: если насос принимает управляющий сигнал в обратном направлении рулевого управления, то угол качающейся шайбы насоса начнет уменьшаться. Когда блок управления направляет команду об обратном направлении рулевого управления свыше определенной величины, он также вычисляет и запоминает отношение скорости мотора к скорости насоса. Блок управления повторно вычисляет указанное отношение по истечении некоторого срока времени, если та же команда об обратном направлении управления все еще действует. Блок управления формирует сигнал неисправности, если указанное отношение не уменьшается.
Краткое описание чертежей.
Фиг.1 представляет упрощенную схему привода гусеничного транспортного средства и системы управления в соответствии с данным изобретением; и
фиг.2-6 изображают логическую блок-схему алгоритма, выполняемого микропроцессорным блоком управления системы управления, изображаемой на фиг.1.
На фиг.1 двигатель 10 гусеничного транспортного средства имеет выходной вал 12, который приводит в действие коническую зубчатую передачу 14 и трансмиссию 16 через сцепление 18. Двигателем 10 управляет электронный блок 11 управления двигателем. Трансмиссия 16 приводит в действие главную, или коническую, передачу 20, которая приводит в действие ведущее колесо 22 левой гусеницы через левую планетарную передачу 24 рулевого управления, и ведущее колесо 26 правой гусеницы - через правую планетарную передачу 28 рулевого управления. Планетарные передачи 24 и 28 рулевого управления предпочтительно являются передачами, описываемыми в патенте США №5390751, выданном 21 февраля 1995, Пютц и др., и права на который переданы правопреемнику данной заявки. Дополнительные наружные планетарные механизмы (не изображены), подобные механизмам на тракторах “John Deere 8000Т”, установлены между планетарными механизмами поворота и соответствующими ведущими колесами, и далее не описываются, так как они не имеют непосредственного отношения к предмету данной заявки. Стояночный тормоз 30 соединен с выходным валом трансмиссии 16, а левый и правый рабочие тормоза 32, 34 соединены с левым и правым ведущими колесами 22, 26 соответственно.
Коническая зубчатая передача 14 приводит в действие насос 40 гидравлического усилителя рулевого управления с переменной производительностью, например, насос объемом 75 куб.см, модель 90, компании Sauer-Sundstrand. Насос 40, в свою очередь, приводит в действие гидромотор 42 рулевого управления с постоянной производительностью: также насос объемом 75 куб.см, модель 90, компании Sauer-Sundstrand. Мотор 42 рулевого управления приводит в действие через коленчатый вал 44 и зубчатую передачу 46 коронную шестерню 47 левой планетарной передачи 24 и - через коленчатый вал 44 зубчатую передачу 48 и шестерню заднего хода 50 - коронную шестерню 52 правой планетарной передачи 28.
Насос 40 гидравлического усилителя рулевого управления имеет качающуюся шайбу (не изображена), положением которой управляет регулирующий клапан качающейся шайбы, или электронное средство 60 управления производительностью (ЭУП). ЭУП предпочтительно является двухступенчатым устройством, в котором первая ступень содержит откидной клапан, работающий от пары соленоидов 59, 61; а вторая ступень содержит форсирующую ступень для насоса, как, например, ступень, используемая в гусеничном тракторе модели 8000Т, выпускаемом компанией “John Deere”.
Датчик 62 скорости вращения, например выпускаемый промышленностью магнитный измерительный преобразователь, устанавливаемый вблизи конического привода 14, направляет сигнал скорости двигателя в блок системы рулевого управления (БСРУ) 70. Соленоидами 59, 61 клапана 60 управляют за счет командных сигналов для насоса (pump_cmd), формируемых с помощью БСРУ 70. БСРУ 70 осуществляет связь с блоком 11 управления двигателем.
Преобразователь 72 положения поворота рулевого колеса, такой как поворотный переменный резистор, направляет в БСРУ 70 сигнал угла рулевого управления (steer_angle), характеризующий положение рулевого колеса 74, управляемого оператором. Данное описание относится к устройству ввода рулевого управления, с нейтральным положением, центрируемым за счет пружины. Данное изобретение также можно применять для нецентрируемого устройства ввода рулевого управления. БСРУ 70 также принимает сигналы от преобразователя 73 рычага переключения передач, описываемого, например, в патенте США 5406860, выданном 18 апреля 1995, Истон и др.
Датчик 76 скорости вращения карданной передачи предпочтительно дифференциальный датчик скорости, работающий по принципу эффекта Холла, например, применяемый в тракторах 8000Т, выпускаемых компанией “John Deere”, установлен вблизи главной передачи 20 и направляет в БСРУ 70 сигнал скорости главной передачи, скорости колеса или самого транспортного средства. Датчик 77 температуры масла для гидравлических систем, такой, который применяют в тракторах 8000Т компании “John Deere”, направляет в БСРУ 70 сигнал температуры масла для гидравлических систем. Магнитное кольцо 78 установлено для вращения его мотором 42, а работающий по принципу эффекта Холла преобразователь 80, установленный вблизи магнитного кольца 78, направляет в БСРУ 70 сигнал скорости мотора, и сигнал направления вращения мотора.
БСРУ 70 содержит выпускаемый промышленностью микропроцессор (не изображен), который выполняет подпрограмму или алгоритм 100, изображенный на фиг.2-6. Для правильной работы этой подпрограммы требуется, чтобы функционировали устройство 72 ввода рулевого управления и датчик 80 скорости и направления вращения мотора. БСРУ 70 преобразует сигнал от устройства 72 ввода рулевого управления в значения команды для соленоида. Команда соленоида 1 характеризует правый поворот устройства ввода рулевого управления, когда транспортное средство находится в передаче/направлении переднего хода, или левый поворот - в передаче/направлении заднего хода. Команда соленоида 2 характеризует левый поворот устройства ввода рулевого управления, когда транспортное средство находится в передаче/направлении переднего хода, или правый поворот - в передаче/направлении заднего хода. Если определено, что значения скорости или направления мотора не являются достоверными, например, по причине обнаруживаемой разомкнутой цепи или по причине неисправности от короткого замыкания, тогда из этой подпрограммы/логики выходят. Например, если известно, что датчик 80 скорости мотора неисправен, тогда БСРУ задает переменное значение open_loop (разомкнутая цепь), как истинное. Это переменное значение используют для прекращения действия подпрограммы в случае неисправности датчика скорости мотора.
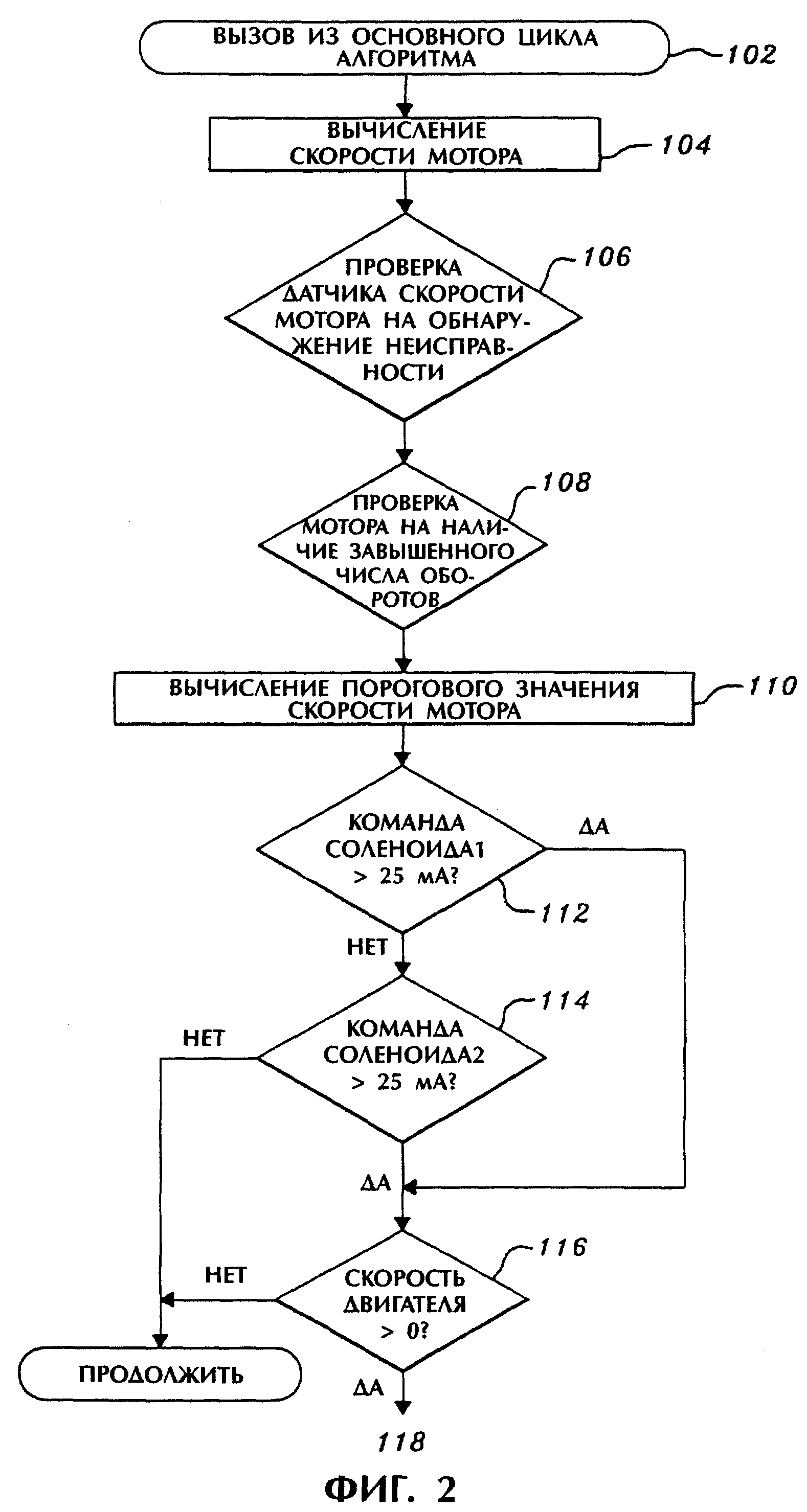
На этапе 1 подпрограмма 100 включает в себя операции 102-110. Операцию 102 начинают выполнять при ее вызове основным циклом алгоритма (не изображен), например, выполняемым с помощью БСРУ трактора “8000Т”. В операции 104 вычисляют значение скорости мотора, поступившее от датчика скорости 80. В операции 106 проверяют датчик скорости мотора на предмет наличия неисправностей. В операции 108 проверяют мотор 42 на наличие условий завышенного числа оборотов. В операции 110 устанавливают пороговое значение, Т, скорости мотора, которое является минимальным значением скорости мотора, необходимой для системы, чтобы она была в состоянии обнаруживать несоответствие скорости и направления вращения мотора.
На этапе 2, в операциях 112-120 подпрограмма проверяет наличие следующих условий и продолжает свою работу только в том случае, если соблюдены следующие условия:
а) Команда для Соленоида 1 превышает 25 мА либо команда для Соленоида 2 превышает 25 мА. (Команда свыше 25 мА приблизительно соответствует скорости мотора, превышающей 100 об/мин) Это минимальное пороговое значение устанавливают в целях исключения ложной сигнализации в случае сверхнормативной рулевой нагрузки, например когда мотор 42 рулевого управления приводят в действие за счет внешней энергии; и
б) скорость двигателя является ненулевой; и
в) флаг, указывающий заедание качающейся шайбы, является ложным; и
г) температура масла для гидравлической системы превышает 20°С. Низкая температура масла в исправном насосе вызовет чрезмерное запаздывание срабатывания насоса. Для исключения возникающих при этом проблем и во избежание формирования ложной сигнализации: действие подпрограммы прекращают, если температура масла ниже определенной температуры масла.
Поэтому операции 112 и 114 выполняют таким образом, что эта подпрограмма остается действующей только в том случае, если преобразователь 72 положения рулевого колеса работает, и только в том случае, если транспортное средство делает правый поворот или левый поворот.
В операции 116 производят выход из подпрограммы, если скорость двигателя не превышает 0. После операции 118 процесс управления переходит в операцию 140, если значение флага заедания не установлено как ложное. После операции 120 процесс управления переходит в операцию 140, если температура масла для гидравлической системы не превышает 20°С.
Этап 3 включает в себя операции 121-132. После операции 121 процесс управления переходит в операцию 140, если в данное время выполняют калибровку. После операции 122 процесс управления переходит в операцию 140, если в данное время режим работы является разомкнутой цепью. Поэтому в результате операции 122 эта логика и подпрограмма действуют только в том случае, если система рулевого управления работает в режиме замкнутой цепи (то есть датчик скорости и направления вращения мотора работает надлежащим образом, без каких-либо известных обнаруживаемых неисправностей).
После операции 124 процесс управления переходит к операции 126, если Соленоид 1 включен, в ином случае - к операции 130. После операции 126 процесс управления переходит к операции 134, если скорость мотора меньше отрицательного порогового значения, -Т; в ином случае - к операции 130. После операции 130 процесс управления переходит к операции 132, если Соленоид 2 включен; в ином случае - к операции 140. После операции 132 процесс управления переходит в операцию 134, если скорость мотора превышает пороговое значение Т; в ином случае - к операции 140.
На этапе 3, в результате выполнения операций 122-132, должна соблюдаться еще одна совокупность условий для функционирования подпрограммы. Система рулевого управления не должна действовать в режиме разомкнутой цепи (т.е. она работает в режиме замкнутой цепи), например, когда датчик 80 скорости/направления вращения мотора работает должным образом. Также при включенном Соленоиде 1 скорость мотора должна быть меньше отрицательного значения порогового значения скорости мотора; при включенном Соленоиде 2 скорость мотора должна превышать положительное значение порогового значения скорости мотора.
В результате выполнения этапов 2 и 3 (операции 112-120 и 122-132) логическая схема обеспечивает превышение значения 25 мА командой управления насосом в направлении, которое является противоположным направлению вращения мотора, т.е. оператор должен вращать рулевое колесо 74 в направлении, противоположном имеющемуся в данное время направлению поворота транспортного средства. Операции 126 и 132 выполняют таким образом, что подпрограмма действует только в том случае, если скорость мотора превышает 100 об/мин. Благодаря этому исключают ложное формирование сигналов неисправности в том случае, если мотор рулевого управления приводят в действие внешней энергией (сверхнормативная рулевая нагрузка).
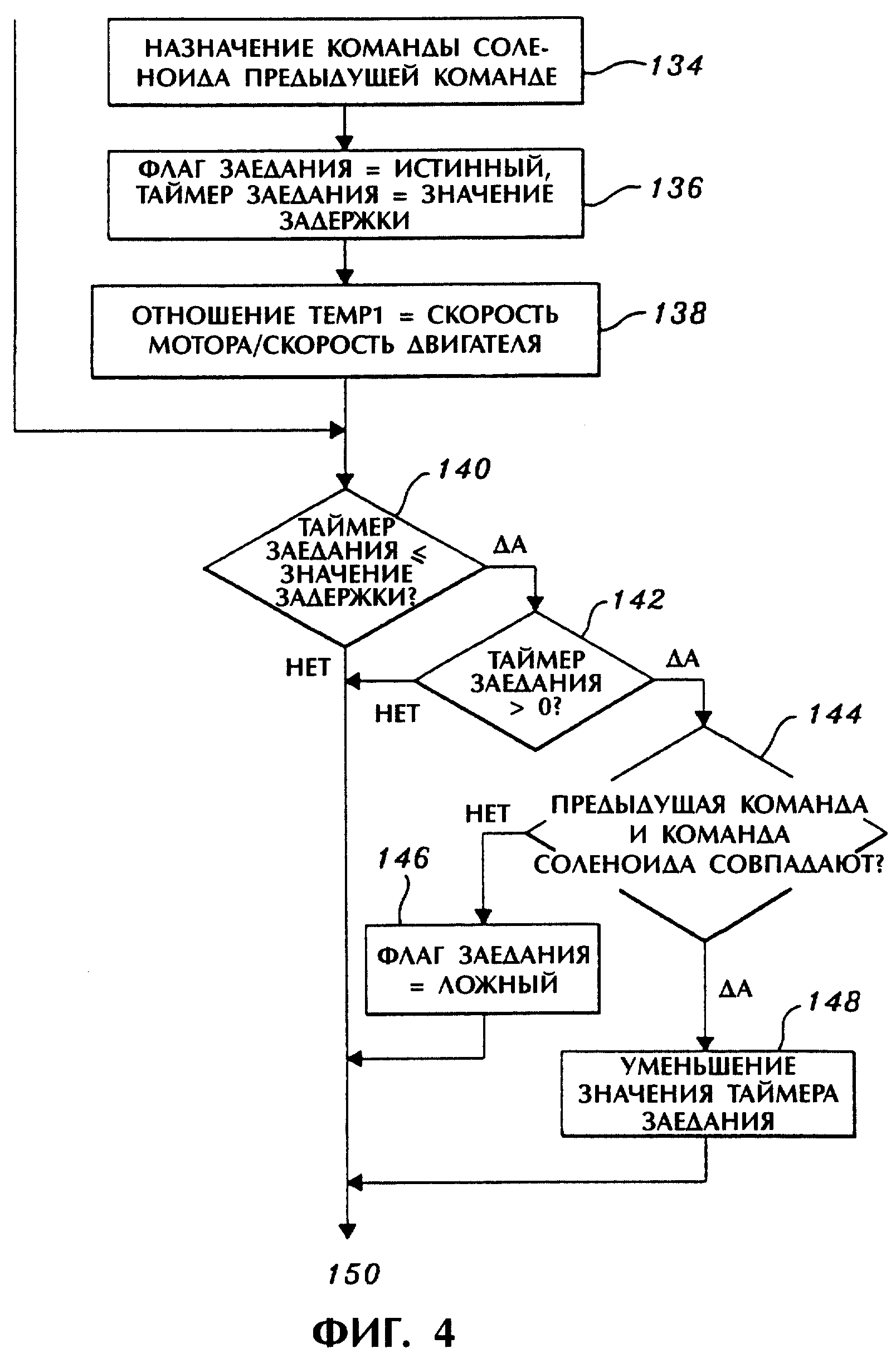
На этапе 4: если указанные выше условия соблюдены, тогда операция 134 назначает значение Команды Соленоида 1 переменному значению Предыдущей Команды, если соленоид 1 (59) включен; и назначает значение Команды Соленоида 2 переменному значению Предыдущей Команды, если соленоид 2 (61) включен. Затем операция 136 устанавливает значение флага заедания как истинное и устанавливает таймер заедания (таймер задержки) на значение, запомненное как таймер конца линии (КЛ). Операция 138 затем вычисляет значение отношения temp1 как отношение скорости мотора к скорости двигателя и умножает его на 64 (для улучшения его определения).
Этап 5 включает в себя операции 140-148 и предназначается для того, чтобы удостовериться в том, что транспортное средство все еще находится в том повороте, который оно начинало. Если это так, то подпрограмма начинает уменьшать значение таймера до нуля; в ином случае (если поворот изменился) флаг заедания снова устанавливают в ложное значение. Конкретнее, после операции 140 процесс управления переходит к операции 142, если время заедания меньше или равно значению задержки; в ином случае процесс управления переходит к операции 150. После операция 142 процесс управления переходит к операции 144, если таймер заедания превышает 0; в ином случае процесс управления переходит к операции 150. После операция 144 процесс управления переходит к операции 148, если переменные значения Предыдущей Команды и Команды Соленоида совпадают; в ином случае - к операции 146, которая устанавливает флаг заедания в ложное значение; затем - к операции 150. Операция 148 уменьшает значение таймера заедания.
Этап 6 включает в себя операции 150-154 и вычисляет отношение temp2 как отношение скорости мотора к скорости двигателя и умножает его на 64 (также для улучшения его определения), если флаг заедания является истинным и значение таймера заедания было уменьшено до нулевого значения; и вычисляет значение разницы отношения путем вычитания отношения temp2 из отношения temp1. Конкретнее, после операции 150 процесс управления переходит к операции 152, если флаг заедания является истинным; в ином случае - к операции 168. После операция 152 процесс управления переходит к операции 154, если таймер заедания имеет значение 0; в ином случае - к операции 168. Операция 154 устанавливает отношение Temp2 как равное отношению скорость мотора/скорость двигателя, и устанавливает значение разницы отношения (diff_ratio) как равное отношению temp1-temp2.
Этап 7 включает в себя операции 156-166, согласно которым устанавливают неисправность заедания качающейся шайбы и устанавливают неисправность насоса, если предыдущей командой является 1 и соленоид 1 включен, и разница отношения превышает или равна -5, либо если предыдущей командой является 2 и соленоид 2 включен, и разница отношения меньше или равна +5; в ином случае флаг заедания устанавливают как ложный в операции 163. Таким образом, если неисправность насоса установлена с помощью БСРУ 70, тогда БСРУ 70 направляет сигнал в контроллер 11 двигателя, чтобы выключить двигатель 10, как сообщение по шине прибора с зарядовой связью (не изображена). Более конкретно, после операции 156 процесс управления переходит к операции 158, если Предыдущая Команда и Команда Соленоида 1 совпадают; в ином случае - к операции 160. После операции 158 процесс управления переходит к операции 166, если diff_ratio имеет значение не меньше -5; в ином случае - к операции 160. После операция 160 процесс управления переходит к операции 162, если Предыдущая Команда и Команда Соленоида 2 совпадают; в ином случае - к операции 163. После операции 162 процесс управления переходит к операции 164, если diff_ratio не превышает 5; и в ином случае - к операции 163. Операция 163 устанавливает значение флага заедания в ложное значение и передает подпрограмму в операцию 168. Операция 164 устанавливает флаг заедания качающейся шайбы и неисправность для выключения двигателя. Операция 166 устанавливает флаг заедания качающейся шайбы и флаг неисправности для выключения двигателя.
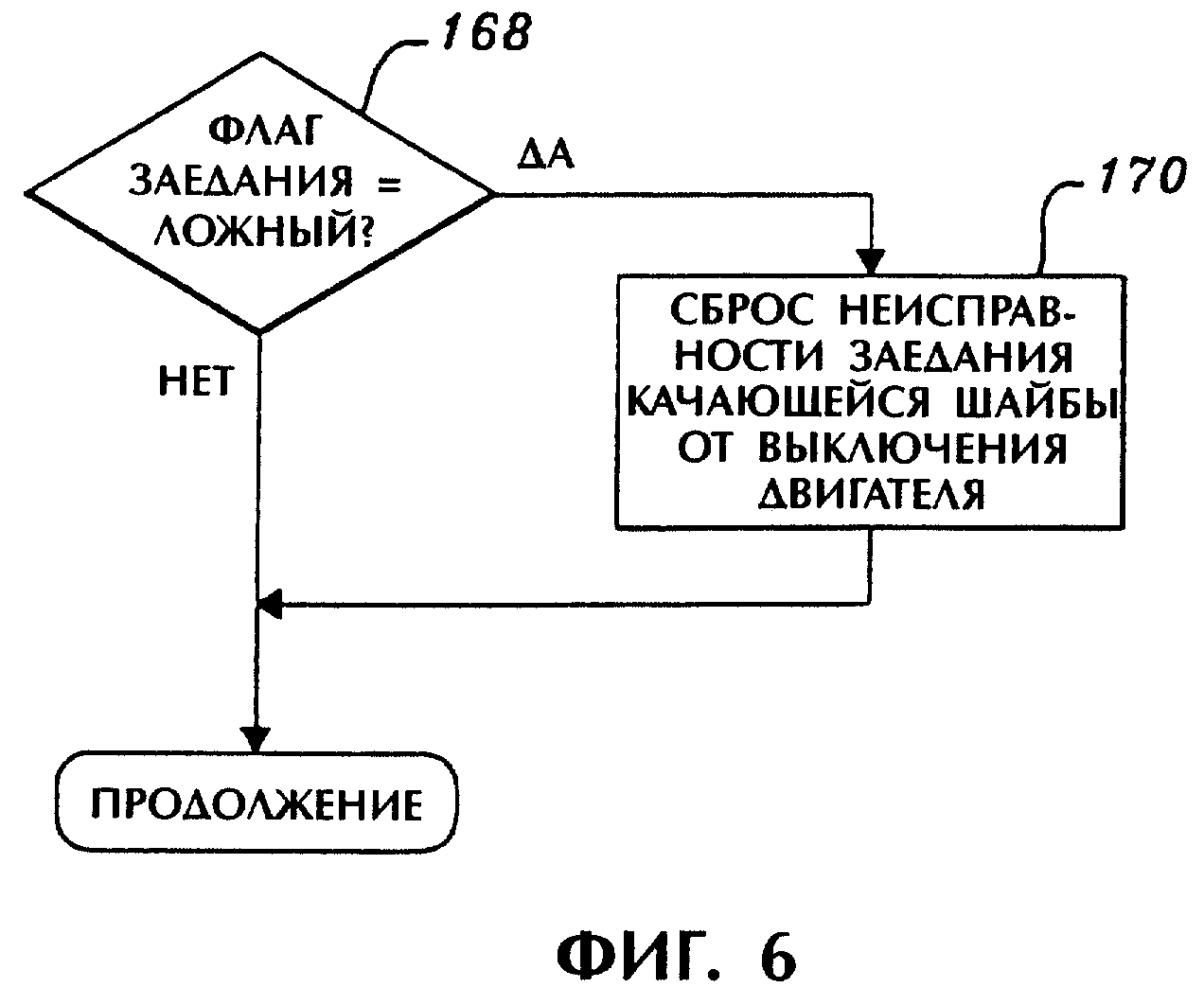
Этап 8 включает в себя операции 168-170, которые сбрасывают неисправность заедания качающейся шайбы, сбрасывают неисправность насоса и устанавливают таймер заедания как значение таймера КЛ, плюс 0,10 секунд, если флаг заедания ложный. Конкретнее, после операции 168 процесс управления переходит к операции 170, если флаг заедания ложный; и в ином случае выходит из подпрограммы. Операция 170 сбрасывает флаг заедания качающейся шайбы и сбрасывает флаг неисправности для выключения двигателя и выходит из подпрограммы.
Операции 154-156 сравнивают изменения или разницу в отношении скорость мотора/скорость двигателя с изменениями в командных сигналах, которые предположительно определяют угол качающейся шайбы (не изображен) насоса 40. Если изменения в значении отношения совпадают с изменениями в командных сигналах, то это является показателем того, что система функционирует надлежащим образом. Если изменения в значении отношения не совпадают с изменениями в командных сигналах, то это является показателем того, что система не функционирует надлежащим образом, и система в соответствии с данным изобретением формирует сигнал неисправности, который можно использовать для инициирования выключения двигателя.
Обычно, если рулевое колесо 74 поворачивают из некоторого положения, тем самым отдавая команду поворота в одном направлении, через центральное положение в некоторое положение, отдающее команду поворота в противоположном направлении, тогда командный сигнал, поступающий в насос 40 гидравлического усилителя рулевого управления, будет изменен на противоположный и обусловит изменение положения качающейся шайбы насоса гидравлического усилителя рулевого управления также на противоположное положение и поэтому отношение скорости мотора рулевого управления к скорости насоса будет быстро изменяться аналогичным образом. Если это отношение не изменяется аналогично изменению положения рулевого колеса, то это будет показателем того, что произошел отказ того или иного вида и что насос 40 гидравлического усилителя рулевого управления более не срабатывает на командный сигнал управления насосом, формируемый рулевым колесом 74.
Эта подпрограмма непрерывно выполняется с помощью БСРУ 70 во время рулевого управления, в результате чего если БСРУ 70 обнаруживает длительное нарушение указанной взаимосвязи, то будет сформирован и запомнен код неисправности, и в контроллер 11 двигателя будет направлена команда на выключение двигателя, чтобы немедленно остановить работу транспортного средства.
Хотя данное изобретение описывается относительно конкретного варианта его реализации, подразумевается, что в свете приводимого выше описания для специалистов данной области техники будут очевидными многие варианты, модификации и изменения. Соответственно данное изобретение включает в себя все таковые варианты, модификации и изменения, которые попадают в рамки прилагаемой формулы изобретения.
Реферат
Изобретение относится к системам привода рулевого управления. Сущность изобретения заключается в том, что система управления содержит блок управления, который принимает сигналы от датчика скорости двигателя, датчика скорости и направления вращения гидромотора рулевого управления и сигналы контроля рулевого управления. Блок управления, если сигналы контроля рулевого управления указывают, что рулевое колесо поворачивают в направлении, противоположном направлению вращения гидромотора рулевого управления, формирует и запоминает первое значение отношения, характеризующее отношение скорости гидромотора рулевого управления к скорости насоса гидравлического усилителя рулевого управления. Затем, если сигнал, управляющий рулевым управлением, не изменится по истечении определенного времени, блок управления формирует и запоминает второе значение отношения, характеризующее последующее отношение скорости гидромотора рулевого управления к скорости насоса гидравлического усилителя рулевого управления. Блок управления затем вычисляет значение разницы, характеризующее разницу между первым и вторым значениями отношения, и формирует сигнал неисправности, если значение разницы имеет величину, которая меньше заранее определенной величины. Технический результат заключается в обеспечении системы обнаружения некоторых видов отказа в системе привода рулевого управления, а также в исключении поворота транспортного средства, если на то не имеется фактической команды оператора. 5 з.п. ф-лы, 6 ил.

Комментарии