Интегрированная система управления транспортным средством - RU2338653C2
Код документа: RU2338653C2
Чертежи








Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе, управляющей несколькими исполнительными механизмами, содержащимися в транспортном средстве, и более конкретно к системе, управляющей совместно несколькими исполнительными механизмами с возможностью взаимного влияния.
УРОВЕНЬ ТЕХНИКИ
В последнее время возрастает тенденция к объединению многих видов устройств управления движением в одном транспортном средстве для управления движением транспортного средства. В транспортном средстве результат, производимый каждым из различных видов устройств управления движением, не всегда может проявляться независимо от других. Существует возможность взаимного влияния. Следовательно, при разработке транспортного средства, которое содержит несколько видов устройств управления движением, существенно в достаточной степени организовать взаимодействие и координацию между соответствующими устройствами управления движением.
Например, когда требуется объединить несколько видов устройств управления движением в одном транспортном средстве, существует возможность на этапе разработки транспортного средства разрабатывать соответствующие устройства управления движением независимо друг от друга, и затем дополнительным или добавочным образом осуществлять взаимодействие и координацию между соответствующими устройствами управления движением.
В случае разработки нескольких видов устройств управления движением вышеизложенным образом организация взаимодействия и координации между соответствующими устройствами управления движением требует длительного времени и больших усилий.
В отношении схемы объединения нескольких видов устройств управления движением в транспортном средстве известна схема совместного использования устройствами управления движением одного исполнительного механизма. Эта схема вызывает проблему, состоящую в том, как разрешить конфликтную ситуацию между несколькими устройствами управления движением, когда требуется одновременно использовать один исполнительный механизм.
В описанном выше случае, где взаимодействие и координация между несколькими устройствами управления движением должны быть организованы дополнительным или добавочным образом после независимой разработки устройств управления движением, затруднительно профессионально решить изложенную выше проблему. Практически проблема может быть улажена только посредством выбора соответствующего из нескольких устройств управления движением более приоритетным, чем другие, и предоставления исполнительного механизма исключительно выбранному устройству управления движением.
В следующих публикациях раскрыт подход в отношении изложенной выше проблемы в транспортном средстве, содержащем несколько исполнительных механизмов, для вождения транспортного средства в требуемом режиме.
В патенте Японии, установленный открытый номер 5-85228, (Документ 1), раскрыта электронная система управления транспортным средством, которая может сократить время, требуемое для разработки, и которая может повысить надежность, улучшить применимость и эксплуатационную годность транспортного средства. Эта электронная система управления для транспортного средства содержит элементы, совместно действующие для выполнения задач управления в отношении действия торможения, мощности двигателя и мощности привода, и элементы для координирования совместного действия элементов для осуществления управления рабочей характеристикой автомашины в соответствии с запросом водителя. Соответствующие элементы размещены в виде нескольких иерархических уровней. При преобразовании запроса водителя в соответствующую рабочую характеристику автомашины по меньшей мере один из элементов координирования иерархического уровня применяютдля воздействия на элемент следующего иерархического уровня, вследствие этого воздействуя на предварительно заданную подчиненную систему системы транспортного средства с водителем, наряду с этим обеспечивая рабочую характеристику, требуемую по иерархическому уровню для этой подчиненной системы.
При организации всей системы в иерархическую конфигурацию в соответствии с указанной электронной системой управления для транспортного средства инструкцию можно передавать только в направлении с верхнего уровня на более нижний уровень. В этом направлении передают инструкцию на выполнение запроса водителя. Соответственно, получают удобопонятную структуру элементов, которые независимы друг от друга. Может быть существенно уменьшена связность отдельных систем. Независимость соответствующих элементов обеспечивает возможность одновременной параллельной разработки отдельных элементов. Следовательно, каждый элемент может разрабатываться в соответствии с предварительно определенной задачей. Должно быть учтено только несколько интерфейсовв отношении более верхнего иерархического уровня и небольшое количество интерфейсов для более нижнего иерархического уровня. Соответственно, может быть достигнута оптимизация в совокупности для водителя и для электронной системы управления транспортным средством в отношении расхода энергии, соответствия требованиям охраны окружающей среды, безопасности и удобства. В результате может быть обеспечена электронная система управления транспортным средством, обеспечивающая возможность сокращения времени разработки и повышения надежности, улучшения применимости и эксплуатационной годности транспортного средства.
В патенте Японии, установленный открытый номер 2003-191774, (Документ 2), раскрыто устройство управления движением транспортного средства интегрированного вида, применяющее иерархическим образом конфигурацию программного обеспечения, для устройства, которое совместно управляет несколькими исполнительными механизмами для выполнения нескольких различных видов управления движением в транспортном средстве, тем самым иерархическая структура оптимизирована с точки зрения практической эксплуатации. Это интегрированное устройство управления движением транспортного средства посредством компьютера совместно управляет несколькими исполнительными механизмами на основе информации, относящейся к вождению транспортного средства водителемдля выполнения нескольких видов управлений движением транспортного средства для транспортного средства. Из конфигурации аппаратных средств и конфигурации программного обеспечения по меньшей мере конфигурация программного обеспечения содержит несколько элементов, организованных иерархически в направлении от водителя к нескольким исполнительным механизмам. Несколько элементов включают в себя: (A) блок управления, определяющий целевой параметр состояния транспортного средства на основе информации, относящейся к вождению, на более верхнем уровне; и (b) исполнительный блок, принимающий в качестве инструкции из блока управления определенный целевой параметр состояния транспортного средства для выполнения принятой инструкции по меньшей мере посредством одного из нескольких исполнительных механизмов на более нижнем уровне. Блок управления содержит блок управления верхнего уровня и блок управления более нижнего уровня, каждый из которых выдает инструкцию для совместного управления несколькими исполнительными механизмами. Устройство управления верхнего уровня определяет первый целевой параметр состояния транспортного средства на основе информации, относящейся к вождению, без учета динамического режиматранспортного средства и обеспечивает определенный первый целевой параметр состояния транспортного средства на блок управления более нижнего уровня. Блок управления более нижнего уровня определяет второй целевой параметр состояния транспортного средства на основе первого целевого параметра состояния транспортного средства, принятого из блока управления верхнего уровня, с учетом динамического режима транспортного средства и обеспечивает определенный второй целевой параметр состояния транспортного средства на исполнительный блок. Каждый из блока управления верхнего уровня, блока управления более нижнего уровня и исполнительного блока для реализации своих уникальных функций вызывает выполнение компьютером нескольких независимых друг от друга модулей на конфигурации программного обеспечения.
В соответствии с этим устройством управления движением транспортного средства интегрированного вида из конфигурации аппаратных средств и конфигурации программного обеспечения по меньшей мере конфигурация программного обеспечения организована в иерархическую структуру, так чтобы содержать: (a) блок управления, определяющий целевой параметр состояния транспортного средства на основе информации, относящейся к вождению, на более верхнем уровне в направлении от водителя к нескольким исполнительным механизмам; и (b) исполнительный блок, принимающий в качестве инструкции из блока управления определенный целевой параметр состояния транспортного средства для выполнения принятой инструкции по меньшей мере посредством одного из нескольких исполнительных механизмов на более нижнем уровне. Другими словами, по меньшей мере конфигурация программного обеспечения организована в иерархические уровни, так чтобы в указанном устройстве управления движением транспортного средства блок управления и исполнительный блок были отделены друг от друга. Так как с точки зрения конфигурации программного обеспечения блок управления и исполнительный блок независимы друг от друга, соответствующие этапы разработки, проектирования, изменения проекта, отладки и т.п. могут осуществляться, не влияя на другие. Соответствующие этапы могут выполняться параллельно друг другу. В результате посредством интегрированного устройства управления движением транспортного средства может быть легко сокращен период этапа работы, требуемый для всей конфигурации программного обеспечения.
Электронная система управления для транспортного средства, раскрытая в Документе 1, имеет недостатки, состоящие в том, что в случае события отказа системы на верхнем иерархическом уровне ухудшается полная управляемость транспортным средством, так как вся система использует иерархическую структуру.
Устройство управления движением транспортного средства интегрированного вида, раскрытое в Документе 2, в частности, раскрывает иерархическую структуру Документа 1 и направлено на оптимизацию иерархической структуры с точки зрения практического использования. В частности, конфигурация программного обеспечения разделена по меньшей мере на блок управления и исполнительный блок, не зависимые друг от друга на иерархическом уровне. Хотя в силу их независимости указанное устройство управления движением транспортного средства интегрированного вида имеет преимущество с точки зрения параллельной обработки разработки, еще не решен вопрос зависимости от основной концепции иерархии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Принимая во внимание изложенное выше, задача настоящего изобретения состоит в обеспечении интегрированной системы управления транспортным средством, имеющей повышенную устойчивость к отказам и выполненной с возможностью простого согласованного добавления функции управления транспортным средством на основе интегрированного управления, без реализации полного управления транспортным средством посредством, например, одного главного ECU (электронного блока управления (ЭБУ)), как в обычном случае.
Согласно аспекту настоящего изобретения интегрированная система управления транспортным средством содержит несколько блоков управления, действующих автономно, для управления состоянием хода транспортного средства на основе запросав результате манипулирования. Каждый блок управления содержит чувствительный блок для обнаружения запроса на действие в отношении по меньшей мере одного блока управления и контроллер, формирующий цель управления на основе обнаруженного запроса для управления транспортным средством посредством манипулирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием цели управления. Система дополнительно содержит процессор, действующий параллельно соответствующим блокам управления для формирования информации, используемой для обновления по мере необходимости запроса на действие или цели управления в каждом блоке управления и обеспечения сформированной информации на соответствующие блоки управления.
Согласно настоящему изобретению несколько блоков управления включают в себя, например, один из блока управления движущейсистемой, блока управления тормозной системой и блока управления рулевой системой. Блок управления движущей системой посредством чувствительного блока обнаруживает манипулирование педалью акселератора, которое является запросом водителя, для формирования цели управления движущей системой, соответствующей манипулированию педалью акселератора, с использованием действий водителя в отношении приведения в действие, тем самым контроллер управляет силовой передачей, которая является исполнительным механизмом. Блок управления тормозной системой посредством чувствительного блока обнаруживает манипулирование тормозной педалью, которое является запросом водителя, для формирования цели управления системы управления, соответствующей манипулированию тормозной педалью, с использованием действий водителя в отношении торможения, тем самым контроллер управляет тормозным устройством, которое является исполнительным механизмом. Блок управления рулевой системой посредством чувствительного блока обнаруживает манипулирование рулевым механизмом, которое является запросом водителя, для формирования цели управления рулевой системой, соответствующей манипулированию рулевым механизмом, с использованием действий водителя в отношении руления, тем самым контроллер управляет рулевым механизмом, который является исполнительным механизмом. Интегрированная система управления транспортным средством содержит процессор, который действует параллельно с блоком управления движущей системой, блоком управления тормозной системой и блоком управления рулевой системой, которые действуют автономно. Например, процессор формирует: 1) информацию для использования в соответствующих контроллерах, основанную на информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю, и обеспечивает сформированную информацию на соответствующие блоки управления; 2) информацию для использования в соответствующих контроллерах для вызова реализации транспортным средством предварительно определенного режима, и обеспечивает сформированную информацию на соответствующие блоки управления; и 3) информацию для использования в соответствующих контроллерах, основанную на текущем динамическом состоянии транспортного средства, и обеспечивает сформированную информацию на соответствующие блоки управления. Каждый блок управления определяет, должна ли в управлении движением транспортного средства отражаться такая входная информация, в дополнение к запросу водителя, из процессора, и если должна отражаться, то насколько. Каждый блок управления также корректирует цель управления и передает информацию по соответствующим блокам управления. Так как каждый блок управления действует автономно, в итоге в соответствующем блоке управления осуществляют управление силовой передачей, тормозным устройством и рулевым механизмом на основе конечной цели (для) приведения в действие, цели (для) торможения и цели (для) руления, вычисленных по обнаруженной чувствительным элементом информации манипулирования водителя, информации, введенной из процессора, и информации, переданной по соответствующим блокам управления. Соответственно, блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими независимым образом друг от друга. Процессор применяется в отношении этих блоков управления так, чтобы действие вождения в соответствии с окружающей средой транспортного средства, поддержка вождения для водителя и управление динамическим движением транспортного средства могли проводиться автоматически параллельным образом. Соответственно, обеспечена возможность децентрализованного управления без главного блока управления, который расположен на более верхнем уровне, чем другие блоки управления, и может быть повышена устойчивость к отказам. Кроме того, в силу автономного действия обеспечена возможность разработки на основе каждого блока управления или каждого процессора. В случае, где должна быть добавлена новая функция поддержки вождения, новая функция может быть реализована непосредственно добавлением процессора или модификацией существующего процессора. В результате может быть обеспечена интегрированная система управления транспортным средством, имеющая повышенную эффективность устойчивости к отказам и выполненная с возможностью простого согласования добавления функции управления транспортным средством на основе интегрированного управления, без реализации полного управления транспортным средством посредством, например, одного главного ECU, как в обычном случае.
Согласно другому аспекту настоящего изобретения интегрированная система управления транспортным средством содержит несколько блоков управления, управляющих состоянием хода транспортного средства на основе запроса манипулирования, и процессор, формирующий информацию для использования в соответствующих блоках управления, основанную на информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю, и обеспечивающий сформированную информацию в соответствующие блоки управления. Каждый блок управления содержит чувствительный блок для обнаружения запроса на действие в отношении по меньшей мере одного блока управления, и блок вычисления для вычисления информации, относящейся к цели управления, для оперирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием по меньшей мере одного из информации, сформированной процессором, и обнаруженного запроса на действие.
Согласно настоящему изобретению блок управления движущей системой через чувствительный блок обнаруживает манипулирование педалью акселератора, которое является запросом водителя, для формирования цели управления движущей системой, соответствующей манипулированию педалью акселератора, с использованием базовой модели водителя в отношении приведения в действие, тем самым контроллер управляет силовой передачей, которая является исполнительным механизмом. Блок управления тормозной системой через чувствительный блок обнаруживает манипулирование тормозной педалью, которое является запросом водителя, для формирования цели управления тормозной системой, соответствующей манипулированию тормозной педалью, с использованием базовой модели водителя в отношении торможения, тем самым контроллер управляет тормозным устройством, которое является исполнительным механизмом. Блок управления рулевой системой через чувствительный блок обнаруживает манипулирование рулевым механизмом, которое является запросом водителя, для формирования цели управления рулевой системой, соответствующей манипулированию рулевым механизмом, с использованием базовой модели водителя в отношении руления, тем самым контроллер управляет рулевым механизмом, который является исполнительным механизмом. Такая интегрированная система управления транспортным средством, которая действует автономно, содержит процессор, который действует параллельно с блоком управления движущей системой, блоком управления тормозной системой и блоком управления рулевой системой, которые действуют автономно. Указанный процессор формирует информацию для использования в соответствующих контроллерах на основе информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю, и обеспечивает сформированную информацию на соответствующие блоки управления. Например, процессор формирует информацию, представляющую степень риска в отношении рабочей характеристики транспортного средства, на основе фрикционной стойкости дороги (значения μ), по которой едеттранспортное средство, температуры наружного воздуха и т.п., в качестве информации, относящейся к окружающей среде вокруг транспортного средства, и/или формирует информацию, представляющую степень риска в отношении манипулирования водителя на основе степени усталости водителя по съемке изображения водителя. Информацию, представляющую степень риска, выводят на соответствующие блоки управления. Каждый блок управления определяет, должна ли в управлении движением транспортного средства отражаться такая входная информация в дополнение к запросу водителя из процессора, и если должна отражаться, то насколько. На этом этапе корректируют цель управления и информацию передают по соответствующим блокам управления. Так как каждый блок управления действует автономно, в итоге в соответствующих блоках управления управляют силовой передачей, устройством торможения и рулевым механизмом на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по информации манипулирования водителя, обнаруженной чувствительным блоком, информации, введенной из процессора, и информации, переданной по соответствующим блокам управления. Соответственно, блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими независимым образом друг от друга. Процессор применяется в отношении указанных блоков управления так, чтобы по информации, относящейся к окружающей среде вокруг транспортного средства, и информации, относящейся к водителю, была сформирована и обеспечена на соответствующие блоки управления информация, относящаяся к риску и устойчивости. Следовательно, может быть обеспечена интегрированная система управления транспортным средством, которая может просто согласовывать управление движением высокого уровня на основе добавления информации окружающей среды вокруг транспортного средства и информации водителя.
Согласно дополнительному аспекту настоящего изобретения интегрированная система управления транспортным средством содержит нескольких блоков управления, управляющих состоянием хода транспортного средства на основе запроса манипулирования, и процессор, формирующий информацию для использования в соответствующих блоках управления для вызова реализации транспортным средством предварительно определенного режима и обеспечивающий сформированную информацию на соответствующие блоки управления. Каждый блок управления содержит чувствительный блок для обнаружения запроса на действие в отношении по меньшей мере одного блока управления и блок вычисления для вычисления информации, относящейся к цели управления, для манипулирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием по меньшей мере одного из информации, сформированной процессором, и обнаруженного запроса на действие.
Изобретение в настоящем аспекте содержит, аналогично изобретению в предыдущем аспекте, блок управления движущей системой, блок управления тормозной системой и блок управления рулевой системой. Интегрированная система управления транспортным средством содержит процессор, который действует параллельно с блоком управления движущей системой, блоком управления тормозной системой и блоком управления рулевой системой, действующими автономно. Процессор формирует и обеспечивает на соответствующие блоки управления информацию для использования в соответствующих контроллерах для вызова реализации транспортным средством предварительно определенного режима. Например, процессор формирует информацию для реализации функцииавтоматическогокруиз-контроля для автоматического вождениятранспортного средства. Информацию для реализации такой функции автоматического круиз-контроля выводят на соответствующие блоки управления. Каждый блок управления определяет, должна ли в управлении движением транспортного средства отражаться такая входная информация для реализации функции автоматического круиз-контроля в дополнение к запросу водителя из процессора, и если должна отражаться, то насколько. Каждый блок управления также корректирует цель управления и передает информацию по соответствующим блокам управления. Так как каждый блок управления действует автономно, в итоге в соответствующих блоках управления управление силовой передачей, тормозным устройством и рулевым механизмом осуществляют на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по информации манипулирования водителя, обнаруженной чувствительным блоком, информации, введенной из процессора, и информации, переданной по соответствующим блокам управления. Соответственно, блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими независимым образом друг от друга. Процессор применяется в отношении указанных блоков управления так, чтобы была сформирована и обеспечена на соответствующие блоки управления информация для реализации функции автоматического круиз-контроля для автоматического вождения транспортного средства. Следовательно, может быть обеспечена интегрированная система управления транспортным средством, выполненная с возможностью простого согласования события применения информации для реализации функции автоматического круиз-контроля и добавления функции автоматического круиз-контроля транспортного средства.
Согласно еще одному аспекту настоящего изобретения интегрированная система управления транспортным средством содержит несколько блоков управления, управляющих состоянием хода транспортного средства на основе запроса манипулирования, и процессор, формирующий информацию для использования в соответствующих блоках управления на основе текущего динамического состояния транспортного средства и обеспечивающий сформированную информацию на соответствующие блоки управления. Каждый блок управления содержит чувствительный блок для обнаружения запроса на действие в отношении по меньшей мере одного блока управления и блок вычисления для вычисления информации, относящейся к цели управления, для оперирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием по меньшей мере одного из информации, сформированной процессором, и обнаруженного запроса на действие.
Изобретение в настоящем аспекте содержит, аналогично изобретению в предыдущем аспекте, блок управления движущей системой, блок управления тормозной системой и блок управления рулевой системой. Интегрированная система управления транспортным средством содержит процессор, который действует параллельно с блоком управления движущей системой, блоком управления тормозной системой и блоком управления рулевой системой, действующими автономно. Процессор формирует информацию для использования в соответствующих контроллерах на основе текущего динамического состояния транспортного средства и обеспечивает сформированную информацию на соответствующие блоки управления. Например, процессор идентифицирует текущее динамическое состояние транспортного средства и формирует информацию для обновления целевого значения в соответствующих блоках управления. Информацию для обновления целевого значения выводят на соответствующие блоки управления. Каждый блок управления определяет, должна ли в управлении движением транспортного средства отражаться такая входная информация для обновления целевого значения на основе текущего динамического состояния, в дополнение к запросу водителя из процессора, и если должна отражаться, то насколько. Каждый блок управления также корректирует цель управления. Например, когда идентифицирована пробуксовка транспортного средства (динамическое состояние), блок управления движущей системой, чтобы избежать дальнейшей пробуксовки, действует для корректирования вращающего момента к меньшему значению, даже если в качестве целевого значения вычислено большое значение. Так как каждый блок управления действует автономно, в итоге в соответствующих блоках управления управление силовой передачей, тормозным устройством и рулевым механизмом осуществляют на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по информации манипулирования водителя, обнаруженной чувствительным блоком, информации, введенной из процессора, и информации, переданной по соответствующим блокам управления. Соответственно, блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими независимым образом друг от друга. Процессор применяется в отношении указанных блоков управления так, чтобы была сформирована и обеспечена на соответствующие блоки управления информация для обновления целевого значения соответствующих блоков управления. Следовательно, может быть обеспечена интегрированная система управления транспортным средством, выполненная с возможностью простого согласования события идентификации динамического состояния транспортного средства и добавления функции компенсации динамики, которая делает устойчивым режим транспортного средства на основе динамического состояния транспортного средства.
Согласно еще дополнительному аспекту настоящего изобретения интегрированная система управления транспортным средством содержит несколько блоков управления, управляющих состоянием хода транспортного средства на основе запроса манипулирования, первый процессор, формирующий информацию для использования в соответствующих блоках управления на основе информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю, и обеспечивающий сформированную информацию на соответствующие блоки управления, второй процессор, формирующий информацию для использования в соответствующих блоках управления для вызова реализации транспортным средством предварительно определенного режима и обеспечивающий сформированную информацию на соответствующие блоки управления, и третий процессор, формирующий информацию для использования в соответствующих блоках управления на основе текущего динамического состояния транспортного средства и обеспечивающий сформированную информацию на соответствующие блоки управления. Каждый блок управления содержит чувствительный блок для обнаружения запроса на действие в отношении по меньшей мере одного блока управления, первый блок вычисления для вычисления первой информации, относящейся к цели управления, для оперирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием по меньшей мере одного из информации, сформированной первым процессором, и обнаруженного запроса на действие, второй блок вычисления для вычисления второй информации, относящейся к цели управления, для оперирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием по меньшей мере одного из информации, сформированной вторым процессором, и вычисленной первой информации, и третий блок вычисления для вычисления третьей информации, относящейся к цели управления, для оперирования совокупностью исполнительных механизмов в соответствии с каждым блоком с использованием по меньшей мере одного из информации, сформированной третьим процессором, и вычисленной второй информации.
Подобно изобретению, изложенному выше, изобретение в настоящем аспекте содержит блок управления движущей системой, блок управления тормозной системой и блок управления рулевой системой. Интегрированная система управления транспортным средством содержит первый, второй и третий процессоры, действующие параллельно с блоком управления движущей системой, блоком управления тормозной системой и блоком управления рулевой системой, которые действуют автономно. Первый процессор формирует информацию для использования в соответствующих блоках управления на основе информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю, и обеспечивает сформированную информацию на соответствующие блоки управления. Например, первый процессор формирует информацию, представляющую степень риска в отношении рабочей характеристики транспортного средства, на основе фрикционной стойкости дороги, по которой едет транспортное средство, температуры наружного воздуха и т.п., в качестве информации, относящейся к окружающей среде вокруг транспортного средства, и/или формирует информацию, представляющую степень риска в отношении манипулирования водителя, на основе степени усталости водителя при съемке изображения водителя. Информацию, представляющую степень риска, выводят на соответствующие блоки управления. Второй процессор формирует и обеспечивает на соответствующий блок управления информацию для использования в соответствующих блоках управления для вызова реализации транспортным средством предварительно определенного режима. Например, второй процессор формирует информацию для реализации функции автоматического круиз-контроля транспортного средства. Информацию для реализации функции автоматического круиз-контроля выводят на соответствующие блоки управления. Третий процессор формирует и обеспечивает на соответствующие блоки управления информацию для использования в соответствующих контроллерах на основе текущего динамического состояния транспортного средства. Например, третий процессор идентифицирует текущее динамическое состояние транспортного средства для формирования информации, требуемой для обновления целевого значения в соответствующих блоках управления. Информацию для обновления целевого значения выводят на соответствующие блоки управления. Каждый блок управления определяет, должна ли отражаться такая входная информация, в дополнение к запросу водителя, из процессора в управлении движением транспортного средства, и если должна, то насколько. На этом этапе корректируют цель управления и информацию передают по соответствующим блокам управления. Так как каждый блок управления действует автономно, в итоге соответствующие блоки управления управляют силовой передачей, устройством торможения и рулевым механизмом на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по информации манипулирования водителя, обнаруженной чувствительным блоком, информации, введенной из процессора, и информации, переданной по соответствующим блокам управления. Соответственно, блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими независимым образом друг от друга. Процессор применяется в отношении указанных блоков управления так, чтобы была сформирована и обеспечена на соответствующие блоки управления информация, относящаяся к риску и устойчивости, по информации, относящейся к окружающей среде вокруг транспортного средства, и информации, относящейся к водителю, информация для реализации функции автоматического круиз-контроля для автоматического вождения транспортного средства и информация для обновления целевого значения для соответствующих блоков управления. Следовательно, может быть обеспечена интегрированная система управления транспортным средством, которая может просто согласовывать управление автоматическим круиз-контролем высокого уровня.
Дополнительно предпочтительно, чтобы в интегрированной системе управления транспортным средством каждый блок действовал автономно и параллельно.
Согласно настоящему изобретению блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими автономным образом и параллельно. Процессор применяется в отношении этих блоков управления автономным и параллельным образом. Следовательно, обеспечена возможность децентрализованного управления без наличия главного блока управления и может быть улучшена устойчивость к отказам. Кроме того, в силу автономного действия обеспечена возможность разработки на основе каждого блока управления или каждого процессора. В случае, где должна быть добавлена новая функция поддержки вождения, новая функция может быть реализована непосредственно добавлением процессора или модификацией существующего процессора.
Дополнительно предпочтительно, чтобы процессор, или первый процессор, содержал чувствительный блок для обнаружения информации, относящейся к окружающей среде вокруг транспортного средства, чувствительный блок для обнаружения информации, относящейся к водителю транспортного средства, и процессор, формирующий информацию, обработанную так, чтобы обнаруженная информация совместно использовалась между соответствующими контроллерами.
Например, процессор, или первый процессор, согласно настоящему изобретению обнаруживает информацию, относящуюся к окружающей среде вокруг транспортного средства, или информацию, относящуюся к водителю транспортного средства, и обрабатывает информацию в метки (абстракции), например, представляя степень, или риск, так чтобы они совместно использовались между соответствующими контроллерами (контроллером в блоке движущего механизма, контроллером в блоке тормоза и контроллером в блоке рулевого механизма). Соответственно, информация может использоваться в общем среди основных блоков управления, при этом устраняется потребность в изменении данных в блоке управления.
Дополнительно предпочтительно, чтобы процессор формировал информацию, представляющую степень коррекции в отношении запроса от водителя в каждом контроллере.
Согласно настоящему изобретению процессор формирует информацию, представляющую степень риска, например, представляя степень коррекции в отношении запроса от водителя так, чтобы информация могла совместно использоваться между соответствующими контроллерами. На основе такой информации может формироваться целевое значение в соответствующих блоках управления.
Дополнительно предпочтительно, чтобы процессор, или второй процессор, содержал процессор, формирующий информацию, основанную на информации для реализации автоматического круиз-контроля или псевдоавтоматического круиз-контроля транспортного средства, обработанную так, чтобы она совместно использовалась между соответствующими контроллерами.
Согласно настоящему изобретению процессор, или второй процессор, обнаруживает информацию для реализации автоматического круиз-контроля или псевдоавтоматического круиз-контроля транспортного средства и обеспечивает флажок для представления функции автоматического круиз-контроля валидной, так чтобы информация совместно использовалась между соответствующими контроллерами (контроллером в блоке движущего механизма, контроллером в блоке тормоза и контроллером в блоке рулевого механизма), и манипулирует целевым значением для автоматического круиз-контроля. Когда на основе такого флажка сделано определение относительно проведения автоматического круиз-контроля или псевдоавтоматического круиз-контроля, информация, требуемая для автоматического круиз-контроля или псевдоавтоматического круиз-контроля может использоваться совместно для основных блоков управления, при этом устраняется потребность в преобразовании данных в блоке управления. Функция псевдоавтоматического круиз-контроля содержит функции, соответствующие автоматическому круиз-контролю, такие как функция управления круиз-контролем, функция, способствующая поддержанию маршрута и т.п.
Дополнительно предпочтительно, чтобы процессор формировал информацию, представляющую степень арбитража в отношении цели управления в соответствующих контроллерах.
В настоящем изобретении, когда установлен флажок, представляющий валидной функцию автоматического круиз-контроля, для определения целевого значения устанавливают арбитраж между целевым значением (приведение в движение, торможение и руление) на основе манипулирования водителем педалью акселератора, тормозной педалью и рулевым механизмом, и целевым значением (приведение в движение, торможение и руление) для автоматического круиз-контроля или псевдоавтоматического круиз-контроля. Может быть реализовано действие координирования между вождением на основе действия водителя и автоматического круиз-контроля.
Дополнительно предпочтительно, чтобы процессор или третий процессор содержал процессор, формирующий информацию, обрабатываемую так, чтобы она использовалась совместно соответствующими контроллерами для реализации режима транспортного средства, согласующегося с целью управления.
Например, когда в качестве возможного варианта текущего динамического состояния транспортного средства обнаружена пробуксовка колес, во избежание дальнейшей пробуксовки вращающий момент изменяют к малому значению, даже если в качестве целевого значения вычислено большое значение вращающего момента. Такая компенсация динамики транспортного средства проводится и в блоке управления тормозной системой, и в блоке управления рулевой системой. Так как соответствующие блоки управления действуют автономно, в итоге соответствующие блоки управления управляют силовой передачей, тормозным устройством и рулевым механизмом на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по информации манипулирования водителя, обнаруженной чувствительным элементом, информации, введенной из процессора, и информации, переданной по соответствующим блокам управления.
Дополнительно предпочтительно, чтобы процессор формировал информацию, представляющую степень арбитража для цели управления в соответствующих контроллерах.
Согласно настоящему изобретению для создания конечного целевого значения устанавливают арбитраж между целевым значением, вычисленным на основе манипулирования водителя (движущий механизм, тормоз и рулевой механизм), и информацией, обновляющей целевое значение, введенной из процессора.
Дополнительно предпочтительно, чтобы блок управления движущей системой и блок управления тормозной системой имели свою движущую силу и тормозную силу распределенными в отношении требуемой движущей силы так, чтобы во взаимодействии мог быть реализован требуемый режим транспортного средства.
В настоящем изобретении исполнительный механизм для реализации требуемой движущей силы содержит силовую передачу движущей системы (включая двигатель, коробку передач) и тормозное устройство тормозной системы (колесный тормоз, вспомогательный тормоз). Блок управления движущей системой и блок управления тормозной системой, управляющие указанными исполнительными механизмами автономно, имеют свою движущую силу и тормозную силу распределенными в отношении требуемой движущей силы так, чтобы во взаимодействии мог быть реализован требуемый режим транспортного средства. Так как каждый блок управления действует автономно и распределенным образом, для распределения движущей силы и тормозной силы осуществляют связь между блоком управления движущей системой и блоком управления тормозной системой.
Дополнительно предпочтительно, чтобы каждый блок управления обеспечивал управление так, чтобы отклонять отражение информации из процессора.
Например, в блоке управления по настоящему изобретению может быть аннулировано корректирование целевого значения управления, выполняемое на основе информации из внешнего процессора, отличного от непосредственно этого. Соответственно, целевое значение может корректироваться на основе информации, введенной из процессора, только когда предусмотрено ее отражение.
Дополнительно предпочтительно, чтобы каждый блок управления выводил информацию на процессор, второй процессор или третий процессор.
Согласно настоящему изобретению каждый блок управления может выводить запрос на назначение поддержки вождения, например, в блок функции автоматического круиз-контроля, идентифицированный как процессор, или второй процессор, для обеспечения возможности автоматического круиз-контроля или псевдоавтоматического круиз-контроля.
Дополнительно предпочтительно, чтобы каждый блок управления был реализован каждым ECU (Электронным Блоком Управления). В каждом ECU действие осуществляется с верхней иерархии управления, соответствующей запросу водителя, к более нижней иерархии управления, соответствующей соответствующим исполнительным механизмам.
Согласно настоящему изобретению действие каждого блока управления осуществляется каждым ECU автономно и параллельно. Другими словами, в каждой из движущей системы, тормозной системы и рулевой системы действие выполняют независимо с более верхней иерархии управления, соответствующей запросу водителя (уровень манипулирования педалью акселератора, уровень манипулирования тормозной педалью, уровень манипулирования рулевым механизмом), в направлении к более нижней иерархии управления, соответствующей соответствующим исполнительным механизмам. Как здесь используется, ECU относится к компьютеру в общем.
Дополнительно предпочтительно, чтобы блок управления движущей системой был реализован первым ECU. Блок управления тормозной системой был реализован вторым ECU. Блок управления рулевой системой был реализован третьим ECU. В каждом ECU действие выполняют с более верхней иерархии управления, соответствующей запросу водителя, в направлении к более нижней иерархии управления, соответствующей соответствующим исполнительным механизмам. Процессор реализуют четвертым ECU, отличным от блоков ECU c первого по третий. Управление функционированием блоков ECU с первого по третий осуществляют параллельным образом. Четвертый ECU подсоединен через интерфейс со стороны более верхней иерархии управления блоков ECU с первого по третий.
Согласно настоящему изобретению, изложенному выше, ввод информации из процессора со стороны верхней иерархии соответствующих блоков управления обеспечивает возможность подачи информации, относящейся к окружающей среде вокруг транспортного средства, и информации, относящейся к водителю, на иерархический уровень запроса водителя, обнаруживаемый чувствительным блоком, что может быть просто отражено в значении цели управления, которое должно быть вычислено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - блочная диаграмма транспортного средства, в котором содержится интегрированная система управления транспортным средством настоящего варианта осуществления.
Фиг.2 - схематическая диаграмма конфигурации интегрированной системы управления транспортным средством согласно настоящему варианту осуществления.
Фиг.3 - схематическая диаграмма конфигурации главной системы (1) управления.
Фиг.4 - диаграмма, представляющая ввод и вывод сигналов в главной системе (1) управления.
Фиг.5 - диаграмма, представляющая ввод и вывод сигналов в главной системе (2) управления.
Фиг.6 - диаграмма, представляющая ввод и вывод сигналов в главной системе (3) управления.
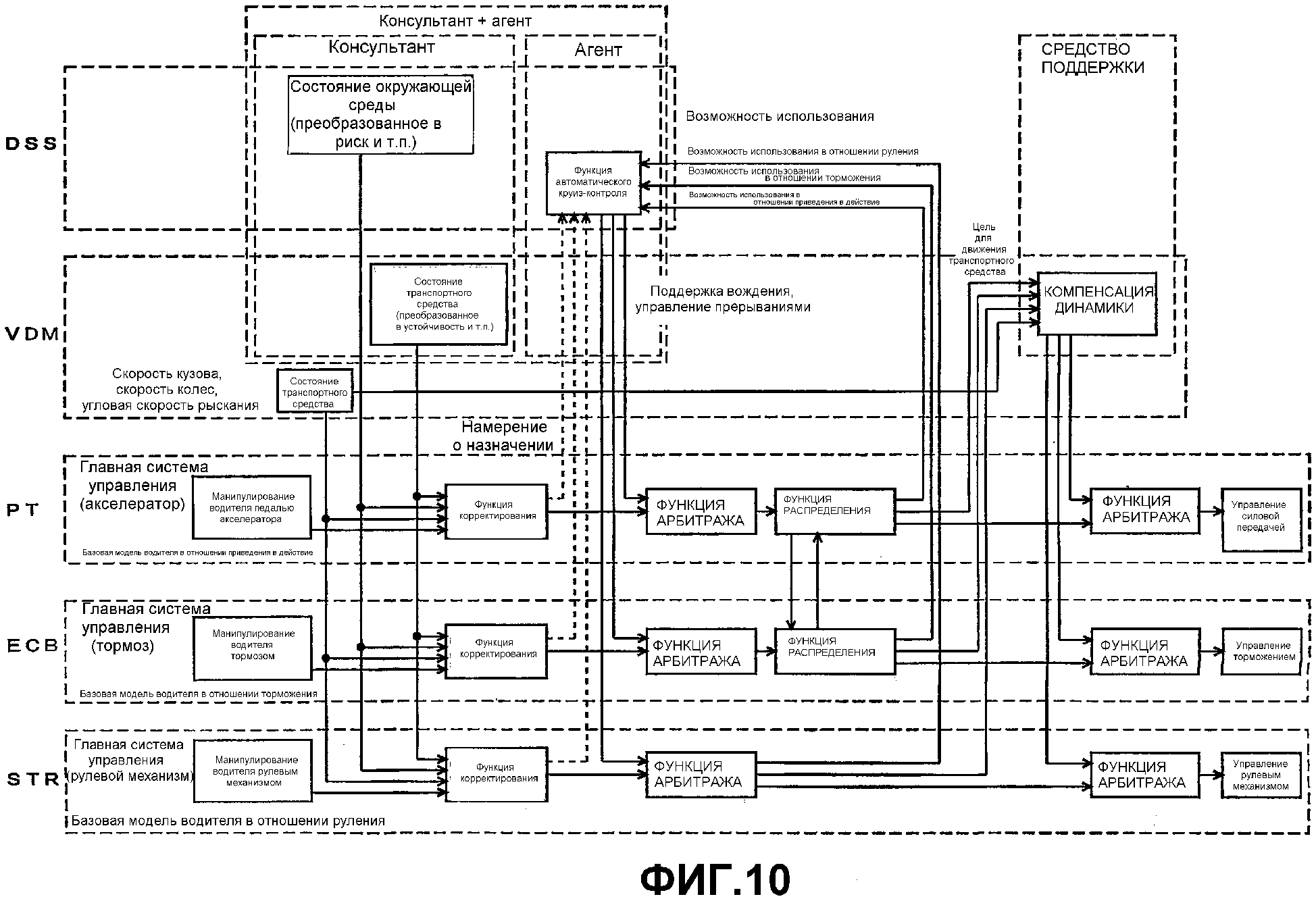
Фиг.7-10 - схематические диаграммы конфигурации интегрированной системы управления транспортным средством согласно модификациям настоящего варианта осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее, согласно чертежам, будет описан вариант осуществления настоящего изобретения. Идентичным элементам назначены идентичные ссылочные позиции. Также идентичны их метки и функции. Вследствие этого они не будут подробно описываться повторно.
Согласно блочной диаграмме фиг.1 интегрированная система управления транспортным средством согласно варианту осуществления настоящего изобретения имеет двигатель внутреннего сгорания, содержащийся в транспортном средстве, в качестве источника энергии для движущего механизма. Источник энергии для движущего механизма не ограничивается двигателем внутреннего сгорания и может быть только электродвигателем или комбинацией двигателя и электродвигателя. Источником энергии электродвигателя может быть аккумуляторная батарея или аккумулятор.
Транспортное средство содержит колеса 100 спереди и сзади соответствующих боков. На фиг.1 "FL" обозначает левое переднее (ЛП) колесо, "FR" обозначает правое переднее (ПП) колесо, "RL" обозначает левое заднее (ЛЗ) колесо и "RR" обозначает правое заднее (ПЗ) колесо.
Транспортное средство содержит двигатель 140 в качестве источника энергии. Рабочее состояние двигателя 140 электрически управляется в соответствии со степенью или уровнем манипулирования водителем педалью акселератора (которая является одним из возможных вариантов детали, оперируемой водителем, относящейся к движущему механизму транспортного средства). Управление рабочим состоянием двигателя 140 осуществляется автоматически, по мере необходимости, независимо от манипулирования педалью 200 акселератора водителем (далее определенным, как "действие приведения в движение" или "ускоряющее действие").
Электрическое управление двигателем 140 может быть реализовано, например, посредством электрического управления углом раскрытия (то есть раскрытием дросселя) дроссельного клапана, расположенного во впускном коллекторе двигателя 140, или электрического управления количеством топлива, вводимым в камеру сгорания двигателя 140.
Транспортное средство настоящего варианта осуществления является заднеприводным транспортным средством, в котором передние правое и левое колеса являются ведомыми колесами, а задние правое и левое колеса являются ведущими колесами. Двигатель 140 соединен с каждым из задних колес через гидротрансформатор 220, коробку 240 передач, карданный вал 260 и блок 280 дифференциала, а также ведущий вал 300, который вращает каждое заднее колесо, все размещены в порядке описания. Гидротрансформатор 220, коробка 240 передач, карданный вал 260 и дифференциал 280 являются элементами передачи мощности, которые являются общими для задних правого и левого колес.
Коробка 240 передач содержит автоматическую коробку передач, которая не изображена. Эта автоматическая коробка передач электрически управляет передаточным числом, с которым изменяется частота оборотов двигателя 140 к частоте вращения выходного вала коробки 240 передач.
Транспортное средство дополнительно содержит рулевое колесо 440, применяемое для поворота водителем. Устройство 480 подачи силы реакции рулевого механизма электрически подает силу реакции рулевого механизма, соответствующую манипулированию поворотом водителем (далее определенным как "руление") в отношении рулевого колеса 440. Уровень силы реакции рулевого механизма является электрически управляемым.
Направление передних правого и левого колес, т. е. угол поворота передних колес, электрически изменяется передним рулевым механизмом 500. Передний рулевой механизм 500 управляет углом поворота передних колес на основе угла, или угла рулевого колеса, на который водитель поворачиваетрулевое колесо 440. Управление углом поворота передних - задних (колес) осуществляется автоматически, по мере необходимости, независимо от действия поворота. Другими словами, рулевое колесо 440 механически отделено от правого и левого передних колес.
Направление левого и правого колес, т.е. угол поворота заднего колеса, электрически изменяется задним рулевым механизмом 520, подобно углу поворота переднего колеса.
Каждое колесо 100 обеспечено тормозом 560, который приводится в действие так, чтобы ограничивать его вращение. Управление каждым тормозом 560 осуществляется электрически в соответствии с оперируемым "количеством" тормозной педали 580 (которая является одним возможным вариантом детали, оперируемой водителем, относящейся к торможению транспортного средства), и также осуществляется автоматически отдельно для каждого колеса 100.
В настоящем транспортном средстве каждое колесо 100 подвешенок кузову транспортного средства (не изображено) через каждую подвеску 620. Характеристики подвешивания соответствующей подвески 620 являются по отдельности электрически управляемыми.
Составляющие элементы транспортного средства, описанные выше, включают в себя исполнительный механизм, применяемый для того, чтобы им оперировали так, чтобы электрически приводить в действие соответствующие элементы, такой как следующие:
(1) Исполнительный механизм для электрического управления двигателем 140;
(2) Исполнительный механизм для электрического управления коробкой 240 передач;
(3) Исполнительный механизм для электрического управления устройством 480 подачи силы реакции рулевого механизма;
(4) Исполнительный механизм для электрического управления передним рулевым механизмом 500;
(5) Исполнительный механизм для электрического управления задним рулевым механизмом 520;
(6) Несколько исполнительных механизмов, обеспеченных в связи с соответствующими тормозами 560, для электрического управления тормозным моментом, подаваемым на каждое колесо отдельно соответствующим тормозом 560;
(7) Несколько исполнительных механизмов, обеспеченных в связи с соответствующими подвесками 620, для электрического управления по отдельности характеристиками подвешивания соответствующей подвески 620.
Как изображено на фиг.1, интегрированная система управления транспортным средством содержится в транспортном средстве, имеющем несколько соединенных исполнительных механизмов, упомянутых выше. Устройство управления движением приводится в действие электроэнергией, подаваемой из аккумуляторной батареи, которая не изображена (которая является возможным вариантом источника энергии транспортного средства).
Дополнительно, для педали 200 акселератора может быть обеспечено устройство подачи силы реакции педали акселератора. В этом случае должен быть обеспечен исполнительный механизм для электрического управления, такой как устройство подачи силы реакции педали акселератора.
Фиг.2 - схематическая диаграмма конфигурации интегрированной системы управления транспортным средством. Интегрированная система управления транспортным средством сформирована из трех основных блоков управления, т. е. главной системы (1) управления в качестве блока управления движущей системой, главной системы (2) управления в качестве блока управления тормозной системой и главной системы (3) управления в качестве блока управления рулевой системой.
В главной системе (1) управления, идентифицированной как блок управления движущей системой, формируют цель управления движущей системой, соответствующую манипулированию педалью акселератора, с использованием базовой модели водителя в отношении приведения в действие, на основе манипулирования педалью акселератора, которое является обнаруженным запросом водителя, тем самым управляют исполнительным механизмом. В главной системе (1) управления входной сигнал из датчика для обнаружения уровня оперирования педалью акселератора (величины хода) водителем анализируют с использованием базовой модели в отношении приведения в действие для вычисления целевого продольного ускорения Gx*(DRV0). Целевое продольное ускорение Gx* корректируют посредством функционального блока корректирования на основе информации из блока-консультанта. Дополнительно осуществляют арбитраж целевого продольного ускорения Gx*(DRV0) посредством функционального блока арбитража на основе информации из блока-агента. Дополнительно главной системой (2) управления осуществляется распределение вращающего момента и тормозного момента, и вычисляют целевой вращающий момент τx*(DRV0) стороны движущего механизма. Дополнительно осуществляют арбитраж целевого вращающего момента τx*(DRV0) посредством функционального блока арбитража на основе информации из блока средств поддержки и вычисляют целевой вращающий момент τx*(DRV). Управление силовой передачей (140, 220, 240) осуществляется так, чтобы создавать указанный целевой вращающий момент τx*(DRV).
В главной системе (2) управления, идентифицированной как блок управления тормозной системой, формируют цель управления тормозной системой, соответствующую манипулированию тормозной педалью, с использованием базовой модели водителя в отношении торможения, на основе манипулирования тормозной педалью, которое является обнаруженным запросом водителя, тем самым управляют исполнительным механизмом.
В главной системе (2) управления входной сигнал из датчика для обнаружения уровня манипулирования тормозной педалью (нажатияводителем) анализируют с использованием базовой модели в отношении торможения для вычисления целевого продольного ускорения Gx*(BRK0). В главной системе (2) управления целевое продольное ускорение Gx*(BRK0) корректируют посредством функционального блока корректирования на основе информации из блока-консультанта. Дополнительно в главной системе (2) управления осуществляют арбитраж целевого продольного ускорения Gx*(BRK0) посредством функционального блока арбитража на основе информации из блока-агента. Дополнительно в главной системе (2) управления распределение вращающего момента и тормозного момента осуществляется главной системой (1) управления, и вычисляют целевой тормозной момент τx*(BRK0) стороны тормоза. Дополнительно осуществляют арбитраж целевого тормозного момента τx*(BRK0) посредством функционального блока арбитража на основе информации из блока средств поддержки и вычисляют целевой тормозной момент τx*(BRK). Исполнительным механизмом тормоза 560 управляют так, чтобы создавать указанный целевой тормозной момент τx*(BRK).
В главной системе (3) управления, идентифицированной как блок управления рулевой системой, формируют цель управления рулевой системой, соответствующей манипулированию механизмом управления, с использованием базовой модели водителя в отношении торможения рулевого механизма, на основе манипулирования рулевым механизмом, которое является обнаруженным запросом водителя, тем самым управляют исполнительным механизмом.
В главной системе (3) управления входной сигнал из датчика для обнаружения угла поворота водителем анализируют с использованием базовой модели в отношении руления для вычисления целевого угла шины. Целевой угол шины корректируют посредством функционального блока корректирования на основе информации из блока-консультанта. Дополнительно осуществляют арбитраж целевого угла шины посредством функционального блока арбитража на основе информации из блока-агента. Дополнительно для вычисления целевого угла шины осуществляют арбитраж целевого угла шины посредством функционального блока арбитража на основе информации из блока средств поддержки. Исполнительными механизмами переднего рулевого механизма 500 и заднего рулевого механизма 520 управляют для создания целевого угла шины.
Кроме того, представленная интегрированная система управления транспортным средством содержит несколько процессоров параллельно главной системе (1) управления (блоку управления движущей системы), главной системе (2) управления (блоку тормозной системы) и главной системе (3) управления (блоку управления рулевой системой), действующим автономно. Первый процессор является блоком-консультантом с функцией консультанта. Второй процессор является блоком-агентом с функцией агента. Третий процессор является блоком поддержки с функцией средств поддержки.
Блок-консультант формирует и обеспечивает на соответствующие главные системы управления информацию для использования в соответствующих главных системах управления, основанную на информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю. Блок-агент формирует и обеспечивает на соответствующие главные системы управления информацию для использования в соответствующих главных системах управления для вызова реализации транспортным средством предварительно определенного режима. Блок средств поддержки формирует и обеспечивает на соответствующие главные системы управления информацию для использования в соответствующих главных системах управления, основанную на текущем динамическом состоянии транспортного средства. В соответствующих главных системах управления делается определение в отношении того, должна ли отражаться в управлении движением транспортного средства такая информация, введенная из блока-консультанта, блока-агента и блока средств поддержки (информация, отличная от запроса водителя), и если должна отражаться, то насколько. Кроме того, корректируют цель управления и/или передают информацию по соответствующим блокам управления. Так как каждая главная система управления действует автономно, в итоге соответствующие блоки управления управляют исполнительным механизмом силовой передачи, исполнительным механизмом тормозного устройства и исполнительным механизмом рулевого механизма на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по обнаруженной информации манипулирования водителя, информации, введенной из блока-консультанта, блока-агента и блока средств поддержки, и информации, переданной по соответствующим главным системам управления.
В частности, блок-консультант формирует информацию, представляющую степень риска в отношении рабочей характеристики транспортного средства, на основе фрикционной стойкостидороги (значения μ), по которой едет транспортное средство, температуры наружного воздуха и т.п., в качестве информации, относящейся к окружающей среде вокруг транспортного средства, и/или формирует информацию, представляющую степень риска в отношении манипулирования водителя на основе степени усталости водителя при съемке изображения водителя. Информацию, представляющую степень риска, выводят в каждую главную систему управления. Указанную информацию, представляющую степень риска, обрабатывают в блоке-консультанте так, чтобы информация могла использоваться в любой из главных систем управления. В каждой главной системе управления выполняют процесс в отношении того, отражать ли информацию, относящуюся к входному риску, в дополнение к запросу водителя из блока-консультанта в управлении движением транспортного средства, и если отражать, то насколько, и т.п.
В частности, блок-агент формирует информацию для реализации функции автоматического круиз-контроля для автоматического вождения транспортного средства. Информацию для реализации функции автоматического круиз-контроля выводят на каждую главную систему управления. В каждой главной системе управления выполняют процесс в отношении того, отражать ли входную информацию для реализации функции автоматического круиз-контроля, в дополнение к запросу водителя из процессора, и если отражать, то насколько, и т.п.
Дополнительно предпочтительно, чтобы блок средств поддержки идентифицировал текущее динамическое состояние транспортного средства и формировал информацию для обновления целевого значения в каждой главной системе управления. Информацию для обновления целевого значения выводят на каждую главную систему управления. В каждой главной системе управления выполняют процесс в отношении того, отражать ли входную информацию для обновления целевого значения на основе динамического состояния в управлении движением транспортного средства, в дополнение к запросу водителя из процессора, и если отражать, то насколько, и т.п.
Как изображено на фиг.2, основные блоки управления главной системы (1) управления, главной системы (2) управления и главной системы (3) управления и блок поддержки блока-консультанта, блока-агента и блока средств поддержки - все сконфигурированы так, чтобы действовать автономно. Главная система (1) управления обозначена как система PT (Силовой передачи (СП)). Главная система (2) управления обозначена как система ECB (Электронно Управляемого Тормоза (ЭУП)). Главная система (3) управления обозначена как система STR (Рулевого механизма(РУЛ)). Участок блока-консультанта и участок блока-агента обозначены как DSS (Система Поддержки Вождения (СПВ)). Часть блока-консультанта, часть блока-агента и часть блока средств поддержки обозначены как система VDM (Управления Динамикой Транспортного средства (РДТ)). При управлении, иллюстрируемом фиг.2, выполняют управление прерываниями для вмешательства из блока-агента (функция автоматического круиз-контроля) в управление, выполняемое в главной системе (1) управления, главной системе (2) управления и главной системе (3) управления.
Далее согласно фиг.3 будет более подробно описана главная система (1) управления (блок управления движущей системой). Хотя обозначение переменных меток на фиг.3 и всех последующих может быть отличным, в связи с этим нет существенного отличия в настоящем изобретении. Например, на фиг.2 интерфейс обозначен как Gx* (ускорение), в то время как на фиг.3 и всех последующих интерфейс обозначен как Fx (движущая сила). Это соответствует (формуле) F (сила) = m (масса) × α (ускорение), где масса транспортного средства (m) не является предметом управления и не предусмотрена переменной. Следовательно, не существует существенного отличия между Gx* (ускорением) на фиг.2 и Fx (движущей силой) на фиг.3 и последующих.
Главная система (1) управления, которой является блок для управления движущей системой, принимает информацию, такую как скорость транспортного средства, передаточное число коробки передач и подобную, идентифицированную как совместно используемая информация (9). С использованием такой информации и базовой модели водителя в отношении приведения в действие, вычисляют в качестве выходных данных базовой модели водителя в отношении приведения в действие Fxp0, представляющую целевое ускорение в продольном направлении. Вычисленную Fxp0 корректируют в Fxp1 посредством функционального блока (2) корректирования с использованием введенного из блока-консультанта состояния (6), относящегося к окружающей среде, которое является информацией (показателем) степени риска, как абстракции риска и т.п. Информацию, представляющую намерение о назначении в отношении реализации функции автоматического круиз-контроля, выводят из функционального блока (2) корректирования на блок-агент (7). С использованием Fxp1, скорректированной функциональным блоком (2) корректирования, и информации для реализации функционального блока (7) автоматического круиз-контроля, введенной из блока-агента, осуществляют арбитраж информации (Fxp1, Fxa) посредством функционального блока (3) арбитража (для получения) Fxp2.
Вычисляют соотношение разделения вращающего момента и тормозного момента между главной системой (1) управления, которой является блок, управляющий движущей системой, и главной системой (2) управления, которой является блок, управляющий тормозной системой. В главной системе (1) управления, соответствующей стороне движущего блока, вычисляют Fxp3 движущей системы. Из функционального блока (4) распределения выводят FxB на главную систему (2) управления и "возможность использования" движущего механизма и целевое значение выводят на блок-агент (7) и средство (8) динамики, которое, соответственно, является блоком средств поддержки.
В функциональном блоке (5) арбитража осуществляют арбитраж информации (для получения) Fxp4 с использованием Fxp3, выведенной из функционального блока (4) распределения и Fxp_vdm из функционального блока (8) компенсации динамики. На основе Fxp4, полученной в результате арбитража, управляют силовой передачей.
Элементы, изображенные на фиг.3, также представлены в главной системе (2) управления и главной системе (3) управления. Так как главная система (2) управления и главная система (3) управления будут описаны более подробно согласно фиг.5-6, описание в отношении главной системы (2) управления и главной системы (3) управления на основе чертежей, соответствующее главной системе (1) управления фиг.3, не будет приведено повторно.
Фиг.4-6 представляют конфигурацию управления главной системы (1) управления, главной системы (2) управления и главной системы (3) управления.
Фиг.4 изображает конфигурацию управления главной системы (1) управления. Главная система (1) управления, которая охватывает управление движущей системой, применяется в соответствии с изложенными ниже процедурами.
В базовой модели водителя в отношении приведения в действие вычисляют выходные данные (Fxp0) базовой модели водителя в отношении движущего механизма на основе входной информации HMI (Человеко-Машинного Интерфейса (ЧМИ)), такой как угол раскрытия педали акселератора (pa), скорость транспортного средства (spd) и передаточное число (ig) коробки передач, которые являются совместно используемой информацией (9), и т.п. На этом этапе с использованием функции f уравнение представлено следующим образом: Fxp0 = f(pa, spd, ig).
В функциональном блоке (2) корректирования Fxp0 корректируют для вывода Fxp1 на основе (степени риска) Risk_Idx[n], котораяявляется информацией (6), относящейся к окружающей среде, из блока-консультанта (например, информацией, преобразованной в концепцию риска, или подобной). На этом этапе с использованием функции f уравнение представлено следующим образом Fxp1 = f(Fxp0, Risk_Idx[n]).
В частности, например, вычисляют Fxp11 = Fxp0 × Risk_Idx[n]. Из блока-консультанта вводят степень риска, такую как Risk_Idx[1] = 0,8, Risk_Idx[2] = 0,6, Risk_Idx[3] = 0,5.
Дополнительно на основе информации, которая преобразована в концепцию устойчивости, и т.п. из состояния (10) транспортного средства вычисляют Fxp12, которая является скорректированным вариантом Fxp0. На этом этапе уравнение представлено, например, следующим образом: Fxp12 = Fxp0 × Stable_Idx[n]. Вводят устойчивость, такую как Stable_Idx[1] = 0,8, Stable_Idx[2] = 0,6, Stable_Idx[3] = 0,5.
Для вывода в качестве Fxp1 может быть выбрано меньшее значение из указанных Fxp11, Fxp12.
В этом функциональном блоке (2) корректирования может быть выведена информация намерения о назначении в функциональный блок (7) автоматического круиз-контроля, являющийся функцией агента, когда водитель нажимает управляющий переключатель круиз-контроля. В случае, где педаль акселератора здесь является педалью управляемого силой реакции вида, намерение водителя относительно автоматического круиз-контроля идентифицируют на основе манипулирования водителя в отношении педали акселератора для вывода информации намерения о назначении в функциональный блок (7) автоматического круиз-контроля.
В функциональном блоке (3) арбитража для вывода Fxp2 в блок (4) распределения выполняют арбитраж между Fxp1, выведенной из функционального блока (2) корректирования, и Fxa, выведенной из функционального блока (7) автоматического круиз-контроля из блока агента. При наличии сопровождающей дополнительной информации (флажок, флажок статуса_возможности использования), указывающей валидность Fxa, выведенной из функционального блока (7) автоматического круиз-контроля, функция арбитража для вычисления Fxp2 выбирает с самым высоким приоритетом Fxa, которая выведена из функционального блока (7) автоматического круиз-контроля. В других случаях для вычисления Fxp2 может быть выбрана Fxp1, которая выведена из функционального блока (2) корректирования, или для вычисления Fxp2 (сила) Fxp1, выведенная из функционального блока (2) корректирования, может иметь Fxa, отраженную в предварительно определенной степени отражения. На этом этапе уравнение представлено, например, следующим образом: Fxp2 = max(Fxp1, Fxa), с использованием функции "max", выбирающей большее значение.
В функциональном блоке (4) распределения действие распределения, в основном, осуществляется между главной системой (1) управления, которой является блок управления движущей системой, и главной системой (2) управления, которой является блок управления тормозной системой. Функциональный блок (4) распределения функционирует для вывода Fxp3, которая является вычисленным результатом, в функциональный блок (5) арбитража для распределения для движущей системы и выводит FxB, которая является вычисленным результатом, в главную систему (2) управления для распределения для тормозной системы. Дополнительно возможность использования движущего механизма Fxp_avail, идентифицированную как информация источника энергии движущего механизма, которая может быть выведена из силовой передачи, являющуюся предметом управления главной системы (1) управления, обеспечивают на функциональный блок (7) автоматического круиз-контроля, идентифицированный как блок-агент, и функциональный блок (8) компенсации динамики, идентифицированный как блок средств поддержки. На этом этапе с использованием функции f уравнение представлено Fxp3 <- f(Fxa, Fxp2), FxB = f(Fxa, Fxp2).
В функциональном блоке (5) арбитража выполняют арбитраж между Fxp3, выведенной из функционального блока (4) распределения, и Fxp_vdm, выведенной из функционального блока (8) компенсации динамики для вывода Fxp4 на контроллер силовой передачи. При наличии сопровождающей дополнительной информации (флажок, флажок vdm_status), указывающей валидность Fxp_vdm, выведенной из функционального блока (8) компенсации динамики, функция арбитража для вычисления Fxp4 выбирает с самым высоким приоритетом Fxp_vdm, которая является выходными данными из функционального блока (8) компенсации динамики. В других случаях для вычисления Fxp4 может быть выбрана Fxp3, которая является выходными данными из функционального блока (4) распределения, или для вычисления Fxp4 (сила) Fxp3, выведенная из функционального блока (4) распределения, может иметь Fxp_vdm, отраженную в предварительно определенной степени отражения. На этом этапе уравнение представлено, например, Fxp4 = f(Fxp3, Fxp_vdm).
Фиг.5 представляет конфигурацию управления главной системы (2) управления. Главная система (2) управления, охватывающая управление тормозной системой, применяется в соответствии с изложенной ниже процедурой.
В базовой модели (1)' водителя в отношении торможения вычисляют выходные данные (Fxp0) базовой модели водителя в отношении тормоза на основе входной информации HMI, такой как нажатие тормозной педали (ba), а также скорость транспортного средства (spd), которые являются совместно используемой информацией (9), боковое G, действующее на транспортное средство (Gy), и т.п. На этом этапе с использованием функции f уравнение представлено Fxb0 = f(pa, spd, Gy).
В функциональном блоке (2)' корректирования Fxb0 корректируют для вывода Fxb1 на основе Risk_Idx[n], которая является информацией (6), относящейся к окружающей среде, из блока-консультанта (например, информацией, преобразованной в концепцию риска, или подобной). На этом этапе, с использованием функции f уравнение представлено Fxb1 = f(Fxb0, Risk_Idx[n]).
Более конкретно, например, вычисляют Fxb11 = Fxb0 × Risk_Idx[n]. Из блока-консультанта вводят степень риска, такую как Risk_Idx[1] = 0,8, Risk_Idx[2] = 0,6, Risk_Idx[3] = 0,5.
Дополнительно на основе информации, которая преобразована в концепцию устойчивости, и т.п. из состояния (10) транспортного средства вычисляют Fxb12, которая является скорректированным вариантом Fxb0. Она вычисляется, например, посредством Fxb12 = Fxb0 × Stable_Idx[n]. Например, вводят Stable_Idx[1] = 0,8, Stable_Idx[2] = 0,6, Stable_Idx[3] = 0,5.
Для вывода в качестве Fxb1 может быть выбрана большая из Fxb11 и Fxb12. В частности, выходные данные могут быть скорректированы в соответствии с дистанцией от предыдущего едущего транспортного средства, обнаруженного радаром миллиметровой волны, с дистанцией до следующего поворота дороги, обнаруженной навигационным прибором или подобным.
В функциональном блоке (3)' арбитража для вывода Fxb2 в блок (4)' распределения выполняют арбитраж между Fxb1, выведенной из функционального блока (2)' корректирования, и Fxba, выведенной из функционального блока (7) автоматического круиз-контроля, который является блоком-агентом. При наличии сопровождающей дополнительной информации (флажок, флажок статуса_возможности использования), указывающей валидность Fxba, выведенной из функционального блока (7) автоматического круиз-контроля, функция арбитража для вычисления Fxb2 выбирает с самым высоким приоритетом Fxba, которая выведена из функционального блока (7) автоматического круиз-контроля. В других случаях для вычисления Fxb2 может быть выбрана Fxb1, которая является выходными данными из функционального блока (2)' корректирования, или для вычисления Fxb2 (сила) Fxb1, которая является выходными данными из функционального блока (2)' корректирования, может иметь Fxba, отраженную в предварительно определенной степени отражения. На этом этапе уравнение представлено, например, следующим образом Fxb2 = max(Fxb1, Fxba), с использованием функции "max", выбирающей большее значение.
В функциональном блоке (4)' распределения действие распределения, в основном, проводят между главной системой (1) управления, которой является блок управления движущей системой, и главной системой (2) управления, которой является блок управления тормозной системой. Функциональный блок (4)' распределения соответствует функциональному блоку (4) распределения главной системы (1) управления. Функциональный блок (4)' распределения выводит Fxb3, которая является вычисленным результатом, в функциональный блок (5)' арбитража для распределения для тормозной системы и выводит FxP, которая является вычисленным результатом, в главную систему (1) управления для распределения для движущей системы. Дополнительно возможность использования тормозаFxb_avail, идентифицированную как информация, которая может быть выведена из тормоза, являющуюся предметом управления главной системы (2) управления, обеспечивают на функциональный блок (7) автоматического круиз-контроля, идентифицированный как блок-агент, и функциональный блок (8) компенсации динамики, идентифицированный как блок средств поддержки. На этом этапе с использованием функции f уравнение представлено Fxb3 <- f(Fxba, Fxb2), FxP = f(Fxba, Fxb2).
В функциональном блоке (5)' арбитража выполняют арбитраж между Fxb3, выведенной из функционального блока (4)' распределения, и Fxb_vdm, выведенной из функционального блока (8) компенсации динамики, который является блоком поддержки, для вывода Fxb4 на контроллер тормоза. При наличии сопровождающей дополнительной информации (флажок, флажок vdm_status), указывающей валидность Fxb_vdm, выведенной из функционального блока (8) компенсации динамики, функция арбитража для вычисления Fxb4 выбирает с самым высоким приоритетом Fxb_vdm, которая является выходными данными из функционального блока (8) компенсации динамики. В других случаях для вычисления Fxb4 может быть выбрана Fxb3, которая является выходными данными из функционального блока (4)' распределения, или для вычисления Fxb4 (сила) Fxb3, выведенная из функционального блока (4)' распределения, может иметь Fxb_vdm, отраженную в предварительно определенной степени отражения. На этом этапе уравнение представлено, например, Fxb4 = max(Fxb3, Fxb_vdm) с использованием функции "max", выбирающей большее значение.
Фиг.6 изображает конфигурацию управления главной системы (3) управления. Главная система (3) управления, охватывающая управление рулевой системой, применяется для управления в соответствии с изложенной ниже процедурой.
В базовой модели (1)"водителя в отношении руления вычисляют выходные данные (Δ0) базовой модели водителя в отношении рулевого механизма на основе входной информации HMI, такой как угол поворота (sa), скорость транспортного средства (spd), которые являются совместно используемой информацией (9), боковое G, действующее на транспортное средство (Gy), и т.п. На этом этапе с использованием функции f уравнение представлено Δ0= f(sa, spd, Gy).
В функциональном блоке (2)" корректирования △0 корректируют для вывода Δ1 на основе Risk_Idx[n], которая является информацией (6), относящейся к окружающей среде, из блока-консультанта (например, информацией, преобразованной в концепцию риска, или подобной). На этом этапе с использованием функции f уравнение представлено Δ1 = f(Δ0, Risk_Idx[n]).
В частности, вычисляют Δ11 = Δ0 × Risk_Idx[n]. Из блока-консультанта вводят степень риска, такую как Risk_Idx[n] = 0,8, Risk_Idx[2] = 0,6, Risk_Idx[3] = 0,5.
Дополнительно на основе информации, которая преобразована в концепцию устойчивости, и т.п. из состояния (10) транспортного средства вычисляют Δ12, который является скорректированным вариантом Δ0. На этом этапе уравнение представлено Δ12 = Δ0 × Stable_Idx[n]. Например, вводят Stable_Idx[1] = 0,8, Stable_Idx[2] = 0,6, Stable_Idx[3] = 0,5.
Для вывода в качестве △1 может быть выбран меньший из Δ11 и Δ12.
При нажатии водителем управляющего переключателя, способствующего поддержанию маршрута, в функциональном блоке (2)" коррекции может быть выведена информация намерения о назначении в функциональный блок (7) автоматического круиз-контроля, который является функцией агента. Кроме того, выходные данные могут быть скорректированы в функциональном блоке (2)" корректирования в соответствии с внешним воздействием, таким как боковой ветер.
В функциональном блоке (3)" арбитража для вывода Δ2 в блок (5)" арбитража выполняют арбитраж между Δ1, выведенным из функционального блока (2)" корректирования, и Δa, выведенным из функционального блока (7) автоматического круиз-контроля, который является блоком-агентом. При наличии сопровождающей дополнительной информации (флажок, флажок статуса_возможности использования), указывающей валидность Δa, который является выходными данными из функционального блока (7) автоматического круиз-контроля, функция арбитража для вычисления Δ2 выбирает с самым высоким приоритетом Δa, который является выходными данными из функционального блока (7) автоматического круиз-контроля. В других случаях для вычисления Δ2 может быть выбран Δ1, который является выходными данными из функционального блока (2)" корректирования, или для вычисления Δ2 (угол) Δ1, который является выходными данными из функционального блока (2)" корректирования, может иметь Δa, отраженный в предварительно определенной степени отражения. На этом этапе уравнение представлено, например, Δ2 = f(Δ1, Δa).
В функциональном блоке арбитража (5)" для обеспечения Δ4 в контроллер рулевого управления выполняют арбитраж между Δ2, выведенным из функционального блока арбитража (3)" арбитража, и Δ_vdm, выведенным из функционального блока (8) компенсации динамики, который является блоком средств поддержки. При наличии сопровождающей дополнительной информации (флажок, флажок vdm_status), указывающей валидность Δ_vdm, выведенного из функционального блока (8) компенсации движения, функция арбитража для вычисления Δ4 выбирает с самым высоким приоритетом Δ_vdm, который является выходными данными из функционального блока (8) компенсации динамики. В других случаях для вычисления Δ4 может быть выбран Δ2, который является выходными данными из функционального блока (3)" арбитража, или для вычисления Δ4 (угол) Δ2, который является выходными данными из функционального блока (3)" арбитража, может иметь Δ_vdm, отраженный в предварительно определенной степени отражения. На этом этапе уравнение представлено, например, Δ4 = max(Δ2, Δ_vdm), с использованием функции "max", выбирающей большее значение.
Далее будет описано действие транспортного средства, содержащего интегрированную систему управления, описанную выше.
При вождении водитель манипулирует педалью 200 акселератора, тормозной педалью 580 и рулевым колесом 440 для управления блоком управления движущей системой, соответствующим действию "хода", которое является основным действием транспортного средства, блоком управления тормозной системой, соответствующим действию "останова", и блоком управления рулевой системой, соответствующим действию "поворота", на основе информации, полученной водителем посредством его органов чувств (в основном, посредством зрения). В основном, водитель управляет транспортным средством посредством входных данных HIM от него. Также может иметь место случай, где водитель манипулирует рычагом переключения передач автоматической коробки передач для обновления передаточного числа коробки 240 передач вспомогательным образом.
При вождениитранспортного средства в дополнение к информации, полученной водителем посредством его органов чувств, различными устройствами, содержащимися в транспортном средстве, обнаруживают различную информацию, относящуюся к окружающей среде вокруг транспортного средства. Эта информация включает в себя, к примеру, дистанцию от транспортного средства, едущего впереди, обнаруженную радаром миллиметровой волны, текущее положение транспортного средства и состояние дороги впереди (поворот дороги, затор в движении и т.п.), обнаруженные навигационным прибором, состояние наклона дороги, обнаруженное датчиком G (ровная дорога, подъем, спуск), температуру наружного воздуха транспортного средства, обнаруженную датчиком температуры наружного воздуха, локальную информацию о погоде в проезжаемом в текущее время месте, принятую из навигационного прибора, оборудованного приемником, коэффициент сопротивления движению автомобиля (состояние дороги с низким μ и т.п. при обледеневшем состоянии поверхности дороги), состояние "хода" вперед транспортного средства, обнаруженное датчиком непросматриваемых поворотов, состояние поддержания маршрута, обнаруженное на основе картины обработанных изображений, захваченной наружной камерой, состояние активности водителя, обнаруженное на основе картины обработанных изображений, захваченной внутренней камерой (осанка водителя, бодрствующее состояние, недремотное состояние), состояние дозирования водителя, обнаруженное при обнаружении и анализе сжатия руки водителя датчиком давления, обеспеченным в рулевом колесе, и т.п. Эта информация разделена на информацию, относящуюся к окружающей среде вокруг транспортного средства, и информацию, относящуюся к водителю непосредственно. Следует отметить, что органы чувств водителя не обнаруживают оба вида информации.
Кроме того, датчиком, обеспеченным в транспортном средстве, обнаруживают динамическое состояние транспортного средства. Информация включает в себя, к примеру, скорость колеса Vw, скорость транспортного средства в продольном направлении Vx, продольное ускорение Gx, боковое ускорение Gy, угловую скорость рыскания γ и т.п.
В качестве системы поддержки вождения для поддержки вождения водителемнастоящее транспортное средство содержит систему управления круиз-контролем и систему, способствующую поддержанию маршрута. Эти системы находятся под управлением блока-агента. Ожидается, что дальнейшая разработка блока-агента должна вести к реализации действия полностью автоматического круиз-контроля, превосходящего псевдоавтоматический круиз-контроль. Интегрированная система управления настоящего варианта осуществления применима для таких случаев. В частности, обеспечивается возможность реализации такой системы автоматического круиз-контроля посредством обновления непосредственно функции автоматического круиз-контроля блока-агента на функцию автоматического круиз-контроля более высокого уровня, без модификации блока управления движущей системой, соответствующего главной системе (1) управления, блока управления тормозной системой, соответствующего главной системе (2) управления, блока управления рулевой системой, соответствующего главной системе (3) управления, блока-консультанта и блока средств поддержки.
Рассматривается случай, где при вождениивпереди на проезжаемой в текущее время дороге существуетповорот. Этот поворот не может быть идентифицирован зрением водителя, и водитель не осведомлен о таком повороте. Блок-консультант транспортного средства обнаруживает наличие такого поворота на основе информации по навигационному прибору.
Когда в случае, изложенном выше, водитель наступает на педаль 200 акселератора для ускорения, впоследствии водитель должен нажать на тормозную педаль 580, чтобы на повороте понизить скорость транспортного средства. В главной системе (1) управления вычисляют выходные данные Fxp0 базовой модели водителя в отношении приведения в действие посредством (уравнения) Fxp0 = f(pa, spd, ig) на основе угла раскрытия педали акселератора (pa), скорости транспортного средства (spd), передаточного числа коробки передач (ig) и т.п. Обычно на основе этой Fxp0 должно быть вычислено большое значение запрошенного вращающего момента для раскрытия дроссельного клапана двигателя 140 и/или понижения передаточного числа коробки 240 передач, чтобы вызывать ускорение транспортного средства. В настоящем изобретении блок-консультант вычисляет степень риска Risk_Idx[n] на основе наличия впереди поворота дороги и выводит эту информацию на функциональный блок (2) корректирования. Функциональный блок (2) корректирования выполняет корректирование так, чтобы не проявилось ускорение, которое будет ожидать водитель от своего нажатия на педаль 200 акселератора.
Когда блок средств поддержки обнаруживает, что поверхность дороги обледенела и при продольном ускорении на этом этапе существует возможность пробуксовки транспортным средством боком, вычисляют и выводят на функциональный блок (2) корректирования Stable_Idx[n], которое является степенью риска, относящейся к устойчивости. Соответственно, функциональный блок (2) корректирования выполняет корректирование, так чтобы не проявлялось ускорение, которое водитель будет ожидать от своего нажатия на педаль 200 акселератора.
Когда обнаруживают пробуксовку транспортного средства, блок средств поддержки выводит на функциональный блок (5) арбитража сигнал, который должен уменьшать вращающий момент. В этом случае Fxp_vdm из блока средств поддержки применяют с приоритетом так, чтобы осуществлялось управление коробкой передач для подавления дальнейшей пробуксовки транспортного средства. Следовательно, даже если водитель сильно наступает на педаль 200 акселератора, арбитраж установлен так, чтобы не проявлялось ускорение, которое водитель будет ожидать от своего нажатия на педаль 200 акселератора.
Соответственно, интегрированная система управления транспортным средством настоящего варианта осуществления действует следующим образом: в главной системе (1) управления, идентифицированной как блок управления движущей системой, обнаруживают манипулирование педалью акселератора, которое является запросом водителя, и формируют цель управления движущей системой, соответствующую манипулированию педалью акселератора, с использованием базовой модели водителя в отношении приведения в действие, тем самым управляют силовой передачей, которая является исполнительным механизмом движущего механизма. В главной системе (2) управления, идентифицированной как блок управления тормозной системой, обнаруживают манипулирование тормозной педалью, которое является запросом водителя, и формируют цель управления тормозной системой, соответствующую манипулированию тормозной педалью, с использованием базовой модели водителя в отношении торможения, тем самым управляют тормозным устройством, которое является исполнительным механизмом тормоза. В главной системе (3) управления, идентифицированной как блок управления рулевой системой, обнаруживают манипулирование рулевым механизмом, которое является запросом водителя, и формируют цель управления рулевой системой, соответствующую манипулированию рулевым механизмом, с использованием базовой модели водителя в отношении руления, тем самым управляют рулевым механизмом, который является исполнительным механизмом. Указанные блоки управления действуют автономно.
В дополнение к блоку управления движущей системой, блоку управления тормозной системой и блоку управления рулевой системой, действующим автономно, дополнительно обеспечен блок-консультант, блок-агент и блок средств поддержки. Блок-консультант формирует и обеспечивает на соответствующие блоки управления информацию для использования в соответствующих блоках управлениях, основанную на информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю. Блок-консультант так обрабатывает информацию, представляющую степень риска в отношении рабочих характеристик транспортного средства на основе фрикционной стойкости текущей дороги, внешней температуры и т.п., в качестве информации, относящейся к окружающей среде вокруг транспортного средства, и/или информацию, представляющую степень риска в отношении манипулирования водителя на основе степени усталости водителя по съемке изображения водителя, чтобы она совместно использовалась между соответствующими блоками управления. Блок-агент формирует и обеспечивает на соответствующие блоки управления информацию для использования в соответствующих блоках управления для вызова реализации транспортным средством предварительно определенного режима. Блок-агент формирует информацию для реализации функции автоматического круиз-контроля для автоматического круиз-контроля транспортного средства. Информацию для реализации функции автоматического круиз-контроля выводят на соответствующие блоки управления. Блок средств поддержки формирует и обеспечивает на соответствующие блоки управления информацию для использования в соответствующем блоке управления, основанную на текущем динамическом состоянии транспортного средства. Блок средств поддержки идентифицирует текущее динамическое состояние транспортного средства для формирования информации, требуемой для обновления целевого значения в соответствующих блоках управления.
В соответствующих блоках управления проводят обработку арбитража в отношении того, должна ли отражаться информация, выведенная из блока-консультанта, блока-агента и блока средств поддержки, в управлении движением транспортного средства, и если должна отражаться, то насколько. Указанный блок управления, блок-консультант, блок-агент и блок средств поддержки действуют автономно. В итоге в соответствующих блоках управления управление силовой передачей, тормозным устройством и рулевым механизмом осуществляют на основе конечной цели для приведения в действие, цели для торможения и цели для руления, вычисленных по информации, введенной из блока-консультанта, блока-агента и блока средств поддержки, а также информации, переданной по соответствующим блокам управления.
Соответственно, блок управления движущей системой, соответствующий действию "хода", которое является основным действием транспортного средства, блок управления тормозной системой, соответствующий действию "останова", и блок управления рулевой системой, соответствующий действию "поворота", обеспечены действующими независимым образом друг от друга. В отношении этих блоков управления обеспечены блок-консультант, блок-агент и блок средств поддержки, которые могут формировать и выводить в соответствующие блоки управления информацию, относящуюся к риску и устойчивости в соответствии с информацией, относящейся к окружающей среде вокруг транспортного средства, и информации, относящейся к водителю, информацию для реализации функции автоматического круиз-контроля для автоматического круиз-контроля транспортного средства и информацию, требуемую для обновления целевого значения соответствующих блоков управления для этих блоков управления. Следовательно, может быть обеспечена интегрированная система управления транспортным средством, которая может просто согласовывать управление автоматическим круиз-контролем верхнего уровня.
В случае, где флажок из блока-консультанта, блока-агента и блока средств поддержки сброшен манипулированием водителя, которому дается самый высокий приоритет, управление с использованием сигнала из этого блока поддержки вождения проводиться не будет.
Модификация
Далее согласно фиг.7-10 будут описаны четыре модификации варианта осуществления настоящего изобретения. Все модификации имеют структуру управления, идентичную иллюстрируемой фиг.2, в отношении признака главной системы (1) управления, идентифицированной как блок управления движущей системой, главной системы (2) управления, идентифицированной как блок управления тормозной системой, и главной системы (3) управления, идентифицированной как блок управления рулевой системой.
Согласно фиг.7, соответствующей первой модификации, функциональный блок распределения главной системы (1) управления и главной системы (2) управления объединяют для размещения в блоке средств поддержки. Следовательно, блок средств поддержки выполняет совместно функцию распределения и функцию компенсации динамики.
Согласно фиг.8, соответствующей второй модификации, в дополнение к объединенному размещению блока средств поддержки главной системы (1) управления и главной системы (2) управления, аналогично первой модификации, из блока средств поддержки выводят "возможность использования". Следовательно, блок средств поддержки выполняет совместно функцию распределения и функцию компенсации динамики, и в блок-агент выводятся возможность использования движущего механизма, возможность использования тормоза и возможность использования рулевого механизма.
Согласно фиг.9, соответствующей третьей модификации, функцию арбитража главной системы (1) управления и главной системы (2) управления объединяют в блоке средств поддержки, в дополнение к обеспечению возможности использования для функции агента. Кроме того, функцию арбитража объединяют в блоке средств поддержки. Следовательно, в блоке средств поддержки выполняют совместно функцию распределения и функцию компенсации динамики, и возможность использования движущего механизма, возможность использования тормоза и возможность использования рулевого механизма выводятся в блок-агент для реализации функции арбитража.
Согласно фиг.10, соответствующей четвертой модификации, блок-консультант и блок-агент варианта осуществления, изображенного на фиг.2, компонуют в один блок. Следовательно, блок-агент-консультант может выполнять совместно функцию консультанта и функцию агента.
Хотя настоящее изобретение было подробно описано и проиллюстрировано, очевидно, что это сделано иллюстративно и исключительно в виде возможного варианта и не предназначено для наложения ограничения, контекст и сущность настоящего изобретения ограничены исключительно по условиям приложенной формулы изобретения.
Реферат
Группа изобретений относится к системам комбинированного управления узлами транспортного средства. Интегрированная система управления содержит главную систему управления (акселератор), управляющую движущей системой, главную систему управления (тормоз), управляющую тормозной системой, и главную систему управления (рулевой механизм), управляющую рулевой системой. Блок-консультант формирует и обеспечивает информацию для использования в каждой системе управления, основанную на информации, относящейся к окружающей среде вокруг транспортного средства, или информации, относящейся к водителю. Блок-агент формирует и обеспечивает информацию для использования в каждой из главных систем управления для вызова реализации транспортным средством предварительно определенного режима. Блок средств поддержки формирует и обеспечивает информацию для использования в каждой из главных систем управления, основанную на текущем динамическом состоянии транспортного средства. Варианты предложенной системы характеризуются повышенной устойчивостью к отказам и обеспечивают возможность простого согласованного добавления функций управления транспортным средством. 5 н. и 17 з.п. ф-лы, 10 ил.
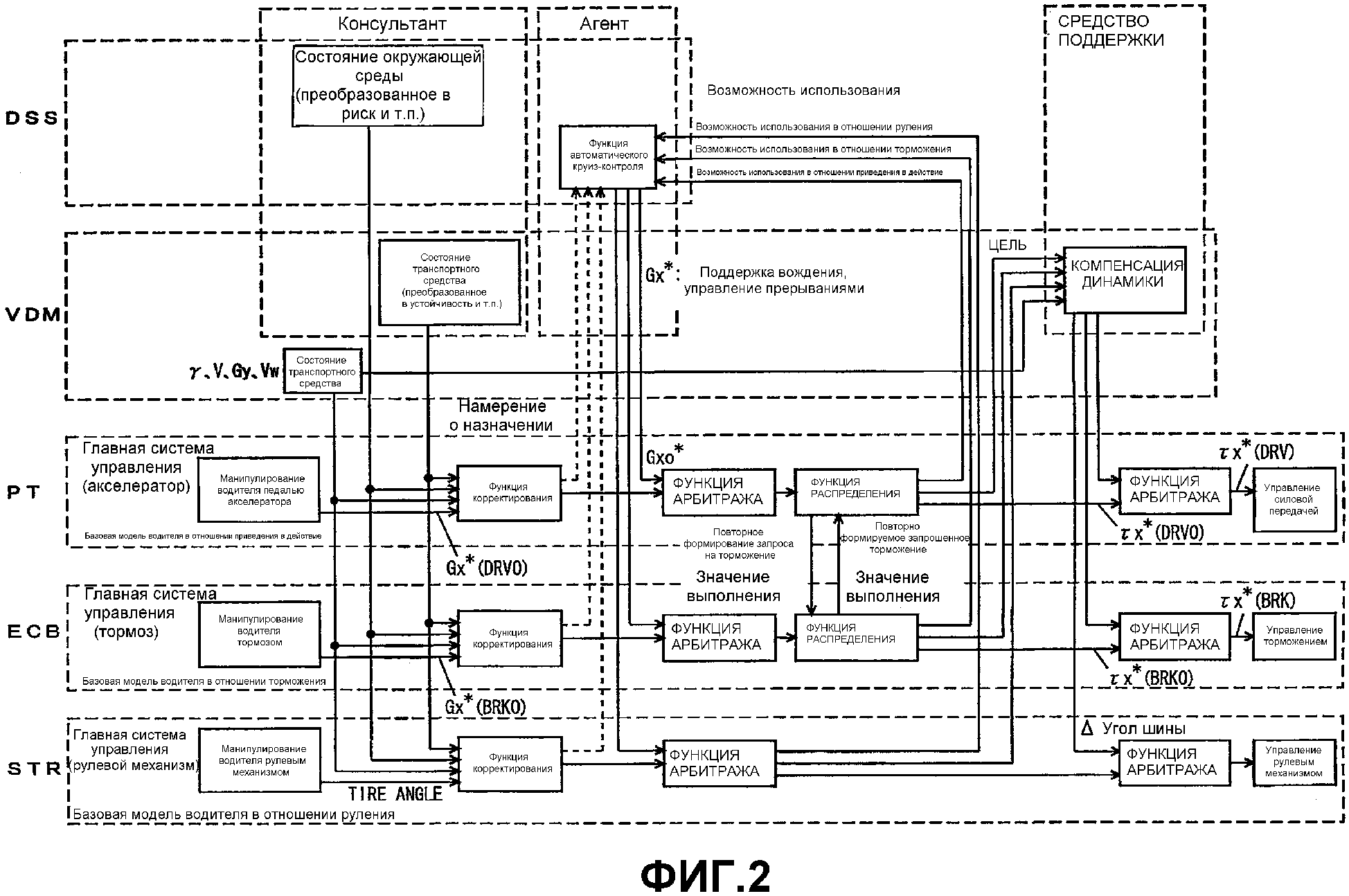
Комментарии