Устройство для обеспечения предотвращения столкновений - RU2654839C2
Код документа: RU2654839C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству для обеспечения предотвращения столкновений, которое помогает водителю избежать столкновения транспортного средства с препятствием.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Общеизвестно, что транспортное средство может быть снабжено устройством для обеспечения предотвращения столкновений. В случае, когда препятствие, с которым транспортное средство с хост-компьютером с высокой степенью вероятности может столкнуться, обнаруживается датчиком, таким как датчик камеры и радарный датчик, устройство для обеспечения предотвращения столкновений замедляет транспортное средство посредством применения автоматического торможения. Кроме того, как описано в опубликованной заявке на патент Японии №2012-116403, например, устройство для обеспечения предотвращения столкновений, которое автоматически управляет транспортным средством с хост-компьютером с целью предотвращения столкновения с препятствием транспортного средства с хост-компьютером, применяя рулевой механизм в дополнение к автоматическому торможению, что является также известным фактом.
[0003] Когда автоматическое рулевое управление осуществляется в ситуации, в которой относительная скорость транспортного средства по отношению к препятствию или скорость транспортного средства с хост-компьютером недостаточно снижена, несмотря на торможение транспортного средства с хост-компьютером посредством выполнения автоматического торможения, то точное управление направлением движения транспортного средства с хост-компьютером относительно препятствия становится затруднительным. Например, изменяется траектория движения для предотвращения столкновений при объезде препятствия транспортным средством с хост-компьютером, при увеличении относительной скорости или скорости транспортного средства с хост-компьютером. Соответственно, приемлемое перемещение транспортного средства с хост-компьютером в сторону от препятствия для уклонения от препятствия, может стать невозможным.
[0004] Кроме того, в случае, когда выполняется автоматическое рулевое управление, необходимо принимать во внимание влияние наличия других препятствий, которые присутствуют вокруг транспортного средства с хост-компьютером, в большей степени, чем в случае, когда выполняется процесс автоматического торможения. Соответственно, в случае, когда выполняется процесс обеспечения предотвращения столкновений, то желательно, чтобы процесс обеспечения предотвращения столкновений выполнялся с помощью только автоматического торможения, когда это возможно. Следовательно, при выполнении процесса автоматического рулевого управления ненадлежащим образом, применение автоматического рулевого управления может иметь весьма неприятные последствия.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Настоящее изобретение было сделано с учетом описанных выше обстоятельств, и его задачей является обеспечить соответствующим образом воздействие автоматического рулевого управления в случае, когда автоматическое рулевое управление выполняется в дополнение к автоматическому торможению.
[0006] Для решения указанной выше технической задачи, согласно объекту настоящего изобретения предложено средство обнаружения препятствий для обнаружения препятствия, присутствующего перед транспортным средством с хост-компьютером, средство автоматического торможения для инициирования процесса автоматического торможения, которое представляет собой управляемое генерирование тормозного усилия на колесе транспортного средства с хост-компьютером, для воздействия (выполнения) в случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с обнаруженным препятствием, средство автоматического рулевого управления для инициирования процесса автоматического рулевого управления, которое представляет собой управление рулевым колесом для предотвращения столкновения, для воздействия (выполнения) в случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием, несмотря на замедление транспортного средства с хост-компьютером посредством воздействия автоматического торможения, средство оценки для оценки того, превышает или нет прогнозируемая скорость при столкновении, представляющая собой прогнозируемую относительную скорость транспортного средства с хост-компьютером относительно препятствия, или представляющая собой скорость транспортного средства с хост-компьютером на позиции, где прогнозируется, что транспортное средство с хост-компьютером, столкнется с препятствием при движении с замедлением, вызванным воздействием автоматического торможения, пороговое значение скорости при столкновении до воздействия автоматического рулевого управления, или оценки того, превышает или нет скорость во время воздействия торможения, представляющая собой относительную скорость транспортного средства с хост-компьютером по отношению к препятствию, или представляющая собой скорость транспортного средства с хост-компьютером в момент времени воздействия автоматического торможения, пороговое значение скорости в условиях воздействия торможения до воздействия автоматического рулевого управления, и средство запрета применения автоматического рулевого управления для запрета применения автоматического рулевого управления, основанного на средстве автоматического управления, в случае, когда средство оценки оценивает, что прогнозируемая скорость при столкновении выше порогового значения скорости при столкновении, или в случае, когда средство оценки оценивает, что скорость в условиях воздействия торможения выше порогового значения скорости в условиях воздействия торможения.
[0007] В соответствии с изобретением, средство обнаружения препятствия обнаруживает препятствие перед транспортным средством с хост-компьютером. Средство автоматического торможения инициирует воздействие автоматического торможения, которое представляет собой управляемое генерирование тормозного усилия на колесе транспортного средства с хост-компьютером, в случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с обнаруженным препятствием. Возможность столкновения между транспортным средством с хост-компьютером и препятствием может быть определена путем использования, например, прогнозируемой продолжительности времени до столкновения с препятствием транспортного средства с хост-компьютером. Средство автоматического рулевого управления инициирует автоматическое рулевое управление, которое представляет собой управление рулевым колесом для предотвращения столкновения, для воздействия в случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием, несмотря на замедление транспортного средства с хост-компьютером посредством применения автоматического торможения. Соответственно, столкновение между транспортным средством с хост-компьютером и препятствием можно избежать с помощью применения автоматического рулевого управления.
[0008] Когда автоматическое управление осуществляется в ситуации, в которой относительная скорость транспортного средства с хост-компьютером по отношению к препятствию или скорость транспортного средства с хост-компьютером не может быть в достаточной степени уменьшена, осуществление точного управления направлением движения транспортного средства относительно препятствия становится затруднительным. Соответственно, когда воздействие автоматического рулевого управления не выполняется надлежащим образом, использование автоматического рулевого управления может привести к весьма неприятным последствиям. В связи с этим, данное изобретение содержит средство оценки и средство запрещения применения автоматического рулевого управления.
[0009] Средство оценки оценивает, превышает или нет прогнозируемая скорость при столкновении, представляющая собой прогнозируемую относительную скорость транспортного средства с хост-компьютером по отношению к препятствию, или представляющая собой скорость транспортного средства с хост-компьютером на позиции, где прогнозируется, что транспортное средство с хост-компьютером столкнется с препятствием при движении с замедлением, вызванным воздействием автоматического торможения, пороговое значение скорости при столкновении до воздействия автоматического рулевого управления. Данная прогнозируемая скорость при столкновении представляет собой прогнозируемую относительную скорость транспортного средства с хост-компьютером относительно препятствия или скорость транспортного средства транспортного средства с хост-компьютером на позиции, где транспортное средство с хост-компьютером, как прогнозируется, столкнется с препятствием после замедления движения под воздействием автоматического торможения. В качестве альтернативного варианта, средство оценки оценивает, превышает или нет скорость во время воздействия торможения, представляющая собой относительную скорость транспортного средства с хост-компьютером относительно препятствия, или представляющая собой скорость транспортного средства с хост-компьютером в условиях воздействия автоматического торможения, пороговое значение скорости в условиях воздействия торможения до применения автоматического рулевого управления. Эта скорость во время применения торможения представляет собой относительную скорость транспортного средства с хост-компьютером относительно препятствия или скорость транспортного средства с хост-компьютером в условиях воздействия автоматического торможения.
[0010] В ситуации, в которой прогнозируется столкновение с препятствием транспортного средства с хост-компьютером, несмотря на воздействие автоматического торможения, например, транспортное средство с препятствием замедляет скорость движения на величину замедления, близкую к предельной величине и, таким образом, величина замедления не может быть существенным образом изменена. Соответственно, прогнозируемая скорость при столкновении может быть оценена, в некоторой степени, посредством оценки величины скорости в условиях воздействия торможения. Соответственно, средство оценки может выполнять оценку того, не превышает ли прогнозируемая скорость при столкновении порогового значения скорости при столкновении, и может выполнить оценку того, превышает или нет скорость в момент времени воздействия торможения пороговое значение скорости в условиях воздействия торможения. Относительная скорость транспортного средства с хост-компьютером относительно препятствия, соответствует значению, которое получается путем вычитания значения скорости транспортного средства с хост-компьютером в направлении, в котором транспортное средство с хост-компьютером движется со стороны препятствия, из значения скорости транспортного средства с хост-компьютером.
[0011] Точность автоматического рулевого управления может снизиться, если прогнозируемая скорость при столкновении или скорость в момент времени воздействия торможения, увеличивается. В связи с этим, средство запрета применения автоматического рулевого управления запрещает воздействие автоматического рулевого управления, основанное на использовании средства автоматического управления, в случае, когда средство оценки оценивает, что прогнозируемая скорость при столкновении выше порогового значения скорости при столкновении, или в случае, когда средство оценки оценивает, что скорость в момент времени воздействия торможения выше порогового значения скорости в условиях воздействия торможения. Соответственно, воздействие автоматического рулевого управления может быть выполнено надлежащим образом в случае, когда автоматическое рулевое управление выполняется в дополнение к процессу автоматического торможения.
[0012] В соответствии с объектом настоящего изобретения, средство оценки выполнено с возможностью вычисления прогнозируемой скорости при столкновении с заранее заданной периодичностью вычислений и определения того, превышает или нет вычисленная прогнозируемая скорость при столкновении пороговое значение скорости при столкновении, когда транспортное средство с хост-компьютером движется с замедлением, вызванным воздействием автоматического торможения.
[0013] В этом объекте изобретения, средство оценки вычисляет прогнозируемую скорость при столкновении с заранее заданной периодичностью вычислений, когда транспортное средство с хост-компьютером движется с замедлением, вызванным воздействием автоматического торможения. Соответственно, прогнозируемая скорость при столкновении может быть точно вычислена. Прогнозируемая скорость при столкновении может быть вычислена на основании, например, расстояния между транспортным средством с хост-компьютером и препятствием, относительной скорости транспортного средства с хост-компьютером относительно препятствия и величины замедления транспортного средства с хост-компьютером. Средство оценки определяет, превышает или нет вычисленная прогнозируемая скорость при столкновении пороговое значение скорости при столкновении. В соответствии с объектом настоящего изобретения, таким образом, воздействие автоматического рулевого управления может быть соответствующим образом выполнено.
[0014] В соответствии с объектом настоящего изобретения, средство оценки выполнено с возможностью фиксирования скорости во время воздействия торможения и определения того, превышает или нет зафиксированная скорость во время воздействия торможения пороговое значение скорости в условиях воздействия торможения, когда применяется автоматическое торможение.
[0015] В соответствии с объектом настоящего изобретения, средство оценки фиксирует скорость во время воздействия торможения и определяет, превышает или нет зафиксированная скорость во время воздействия торможения пороговое значение скорости в условиях воздействия торможения, когда применяется автоматическое торможение. Таким образом, в соответствии с объектом настоящего изобретения, воздействие автоматического рулевого управления может быть запрещено на ранней стадии, на которой применяется автоматическое торможение.
[0016] Объект настоящего изобретения дополнительно содержит средство распознавания препятствия (S21, S45) для распознавания того, является ли препятствие неподвижным объектом или движущимся объектом, и средство изменения порогового значения скорости при столкновении для установки порогового значения скорости при столкновении на более высокое значение в случае, когда посредством средства распознавания препятствия установлено, что препятствие является неподвижным объектом, чем в случае, когда посредством средства распознавания препятствия установлено, что препятствие представляет собой движущийся объект.
[0017] Необходимо принимать во внимание величину перемещения препятствия в случае, когда процесс предотвращения столкновения осуществляется посредством воздействия автоматического рулевого управления, и обнаружение изменения величины перемещения происходит в том случае, когда препятствие представляет собой движущийся объект. Соответственно, в случае, когда препятствие является движущимся объектом, направлением движения транспортного средства с хост-компьютером, основанном на автоматическом рулевом управлении, необходимо управлять с высокой степенью точности. В случае, когда препятствием является неподвижный объект, напротив, точность управления направлением движения, основанном на автоматическом рулевом управлении, может быть снижена по сравнению со случаем, когда препятствие представляет собой движущийся объект.
[0018] В одном из объектов настоящего изобретения средство распознавания препятствия устанавливает, является ли препятствие неподвижным объектом или движущимся объектом. Средство изменения порогового значения скорости при столкновении устанавливает пороговое значение скорости при столкновении на более высокое значение в случае, когда установлено, что препятствие является неподвижным объектом, чем в случае, когда установлено, что препятствие представляет собой движущийся объект. Соответственно, автоматическое рулевое управление, предпочтительно, может воздействовать в случае, когда препятствие является неподвижным объектом, чем в случае, когда препятствие является движущимся объектом. Следовательно, в соответствии с объектом настоящего изобретения, подходящее воздействие автоматического рулевого управления может быть выполнено в соответствии с типом препятствия (движущийся объект/неподвижный объект).
[0019] Объект изобретения дополнительно содержит средство распознавания препятствия для установления того, является ли препятствие неподвижным объектом или движущимся объектом, и средство изменения порогового значения скорости в условиях воздействия торможения для установки порогового значения скорости в условиях воздействия торможения на более высокое значение в случае, когда средством распознавания препятствия установлено, что препятствие является неподвижным объектом, чем в случае, когда средством распознавания препятствия установлено, что препятствие является движущимся объектом.
[0020] В соответствии с объектом настоящего изобретения, подходящее воздействие автоматического рулевого управления может быть осуществлено в соответствии с типом препятствия.
[0021] В приведенном выше описании, обозначения, используемые для вариантов осуществления, добавлены в скобках в отношении требований, составляющих изобретение, соответствующие вариантам осуществления, для облегчения понимания изобретения. Тем не менее, требования, составляющие изобретение, ни в коем случае не ограничены вариантами осуществления, указанными обозначениями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] Признаки, преимущества, техническое и промышленное значение типовых вариантов осуществления настоящего изобретения будут описаны ниже со ссылками на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
Фиг. 1 представляет собой блок-схему, показывающую схематически конфигурацию устройства для обеспечения предотвращения столкновений в соответствии с этим вариантом осуществления;
Фиг. 2 представляет собой вид сверху, показывающий траекторию уклонения от препятствия транспортным средством с хост-компьютером;
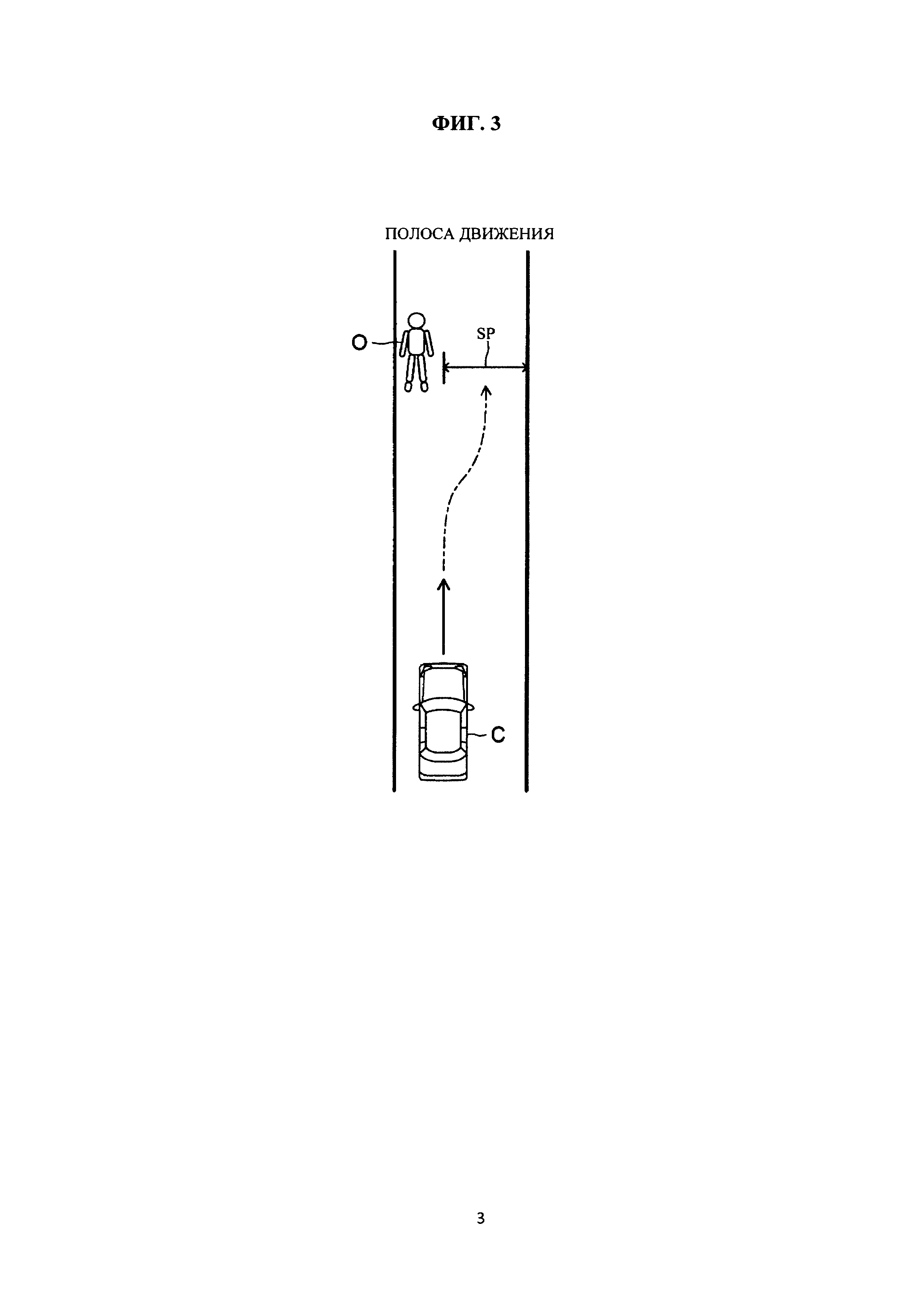
Фиг. 3 представляет собой вид сверху, показывающий пространство для уклонения от препятствия в полосе движения;
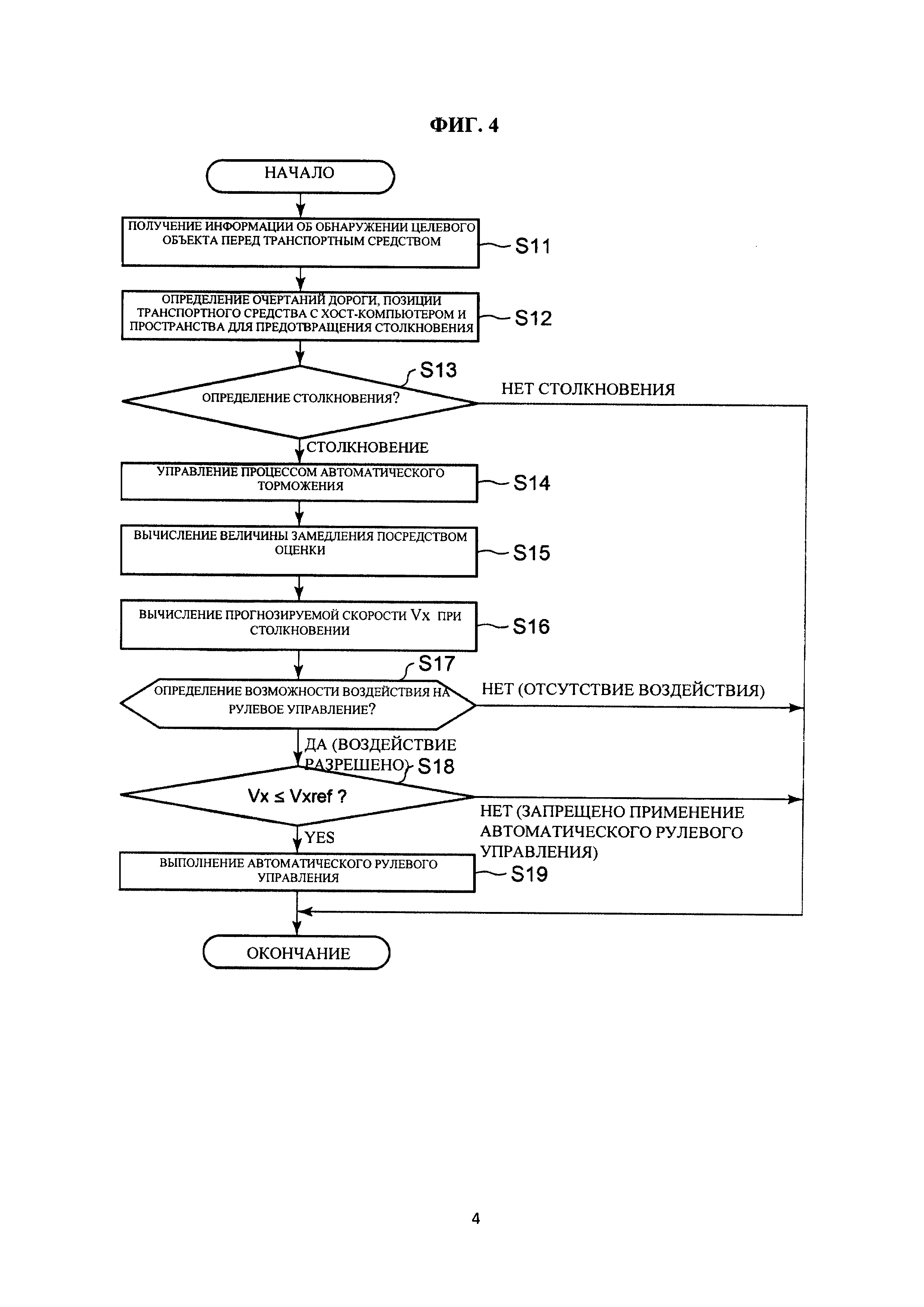
Фиг. 4 показывает блок-схему процедуры, иллюстрирующую процедуру 1 управления обеспечением предотвращения столкновений;
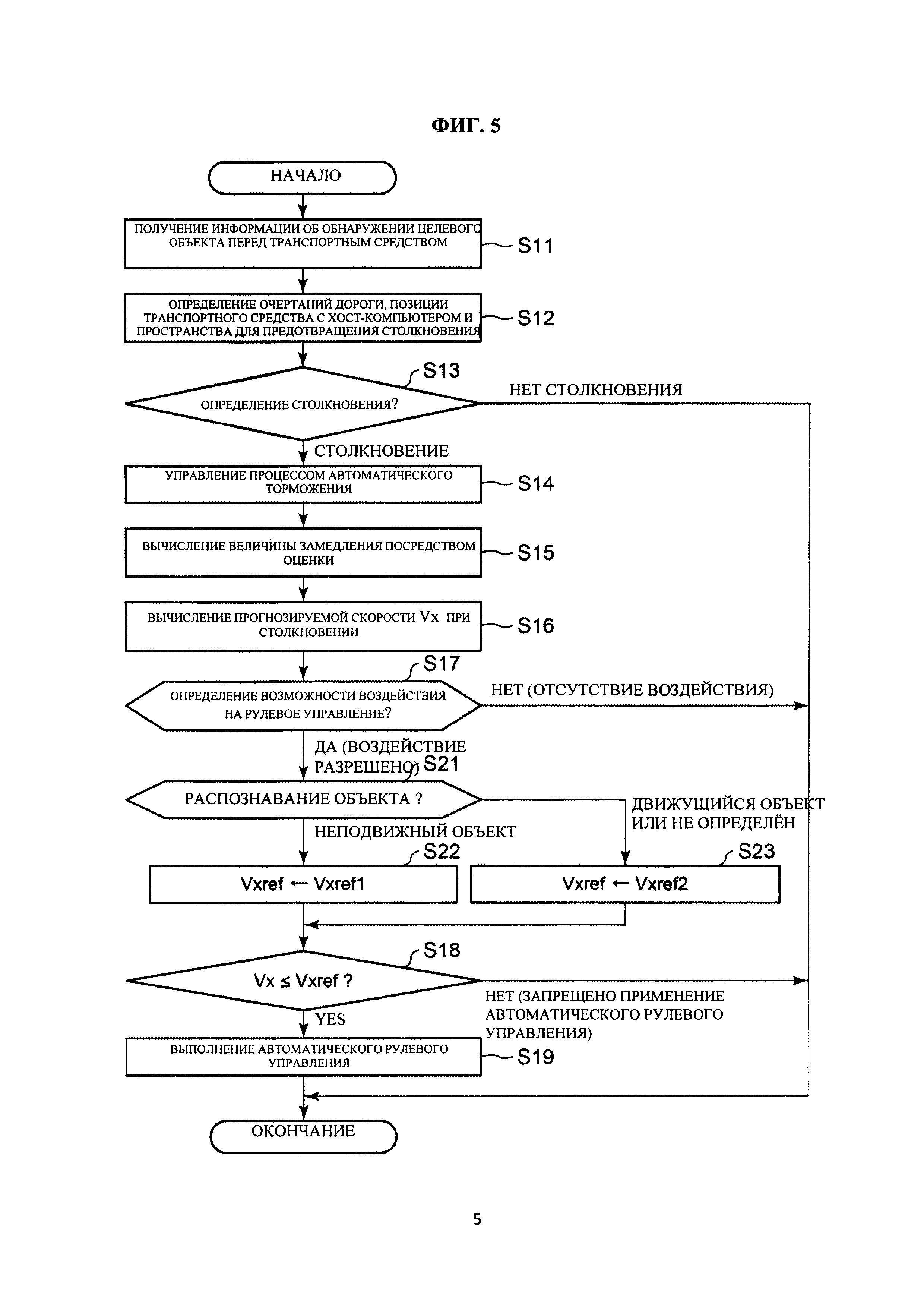
Фиг. 5 показывает блок-схему процедуры, иллюстрирующую модифицированный пример процедуры 1 управления обеспечением предотвращения столкновений;
Фиг. 6 показывает блок-схему процедуры, иллюстрирующую процедуру 2 управления обеспечением предотвращения столкновений;
Фиг. 7 показывает блок-схему процедуры, иллюстрирующую процедуру установки индикатора; и
Фиг. 8 показывает блок-схему процедуры, иллюстрирующую модифицированный пример процедуры установки индикатора.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0023] Далее будет приведено подробное описание вариантов осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. Фиг. 1 представляет собой блок-схему системной конфигурации устройства для обеспечения предотвращения столкновений в соответствии с этим вариантом осуществления.
[0024] Устройство для обеспечения предотвращения столкновений снабжено опорным ЭБУ 10, ЭБУ 20 торможения, ЭБУ 30 рулевого управления и ЭБУ 40 сигнализации. Каждый из ЭБУ 10, 20, 30, 40 снабжен микрокомпьютером, в качестве основного элемента. Блоки ЭБУ 10, 20, 30, 40 соединены друг с другом с возможностью передавать и принимать различные типы информации управления и запросных сигналов между ними посредством сети контроллеров (CAN, не показано). ЭБУ является аббревиатурой электронного блока управления. В данном описании, микрокомпьютер содержит процессор и запоминающее устройство, такое как ПЗУ и ОЗУ, и процессор реализует различные функции путем выполнения инструкций (программ), хранящихся в ПЗУ. В данном описании, транспортное средство, на котором установлено устройство для обеспечения предотвращения столкновений, будет упоминаться как «транспортное средство с хост-компьютером».
[0025] Опорный ЭБУ 10 соединен с датчиком 51 окружающей обстановки, датчиком 52 угла поворота рулевого колеса, датчиком 53 угловой скорости рыскания, датчиком 54 скорости транспортного средства и датчиком 55 ускорения. Датчик 51 окружающей обстановки имеет функцию получения информации, относящуюся, по меньшей мере, к дороге впереди транспортного средства с хост-компьютером и трехмерному объекту, который находится на дороге. Примеры трехмерного объекта включают в себя движущийся объект, такой как пешеход, велосипедист и автомобиль, и неподвижный объект, такой как столб освещения, дерево и ограждение.
[0026] Датчик 51 окружающей обстановки снабжен, например, радарным датчиком и датчиком камеры. Радарный датчик облучает находящуюся вблизи зону (включающую в себя, по меньшей мере, фронтальное направление) транспортного средства с хост-компьютером, например, посредством радиоволн с длиной волны миллиметрового диапазона. В случае, когда трехмерный объект присутствует, радарный датчик принимает отраженную волну от трехмерного объекта и определяет факт наличия или отсутствия трехмерного объекта и относительное соотношение между транспортным средством с хост-компьютером и трехмерным объектом (например, расстояние между транспортным средством с хост-компьютером и трехмерным объектом и относительную скорость транспортного средства с хост-компьютером и трехмерного объекта) на основании продолжительности облучения и периода приема радиоволн.
[0027] Датчик камеры снабжен стереокамерой или тому подобным. Датчик камеры формирует изображения ландшафта по правую и левую стороны впереди транспортного средства и определяет состояние дороги, наличие или отсутствие трехмерного объекта, относительное взаиморасположение между транспортным средством с хост-компьютером и трехмерным объектом и т.п. на основании данных изображений справа и слева. Кроме того, датчик камеры распознает разделительную линию, как белые линии справа и слева на дороге (далее упоминаемого как белые линии) и определяет состояние дороги и позиционное взаиморасположение между дорогой и транспортным средством с хост-компьютером.
[0028] Информация, полученная с помощью датчика 51 окружающей обстановки, будет именоваться информацией целевого объекта. Датчик 51 окружающей обстановки многократно передает информацию целевого объекта в опорный ЭБУ 10 с заранее определенной цикличностью. Датчик 51 окружающей обстановки не обязательно должен быть снабжен радарным датчиком и датчиком камеры. Например, датчик 51 окружающей обстановки может использовать датчик, который реагирует на требование точности обнаружения. Кроме того, информация навигационной системы также может быть использована в отношении информации, относящейся к состоянию дороги, по которой перемещается транспортное средство с хост-компьютером, и позиционного взаиморасположения между дорогой и транспортным средством с хост-компьютером.
[0029] Датчик 52 угла поворота рулевого колеса устанавливает угол поворота рулевого колеса транспортного средства с хост-компьютером и передает сигнал обнаружения в опорный ЭБУ 10. Датчик 53 угловой скорости рыскания устанавливает угловую скорость рыскания, соответствующую транспортному средству, и передает сигнал обнаружения в опорный ЭБУ 10. Датчик 54 скорости транспортного средства определяет скорость движения транспортного средства с хост-компьютером (далее упоминаемую, как скорость транспортного средства) и передает сигнал обнаружения в опорный ЭБУ 10. Датчик 55 ускорения определяет величину продольного ускорения, которое представляет собой ускорение, действующее в продольном направлении транспортного средства с хост-компьютером, и величину бокового ускорения, которое является ускорением, действующим в горизонтальном направлении транспортного средства с хост-компьютером (в направлении по ширине транспортного средства), и передает сигналы обнаружения в опорный ЭБУ 10. Датчик 54 скорости транспортного средства может быть выполнен с возможностью передачи сигнала датчика скорости вращения колеса транспортного средства вместо датчика 54 скорости транспортного средства в опорный ЭБУ 10, таким образом, что скорость транспортного средства вычисляется на основании значения счетчика, полученного с помощью импульсного сигнала датчика скорости вращения колеса транспортного средства, размещенного на каждом колесе транспортного средства транспортного средства с хост-компьютером.
[0030] Опорный ЭБУ 10 обнаруживает препятствие, которое присутствует перед транспортным средством с хост-компьютером, на основании сигналов обнаружения от этих датчиков. В случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием, опорный ЭБУ 10 выдает команду на торможение для предотвращения столкновений в ЭБУ 20 торможения и при необходимости передает команду управления для предотвращения столкновений в ЭБУ 30 рулевого управления. Процесс обработки опорным ЭБУ 10 будет описан ниже.
[0031] ЭБУ 20 торможения соединен с тормозным приводом 21. Тормозной привод 21 размещен в гидравлическом контуре между главным цилиндром (не показан), который нагнетает гидравлическое масло в соответствии с величиной усилия на педаль тормоза, и фрикционными тормозными механизмами 22, которые расположены на правом, левом, переднем и заднем колесах. Фрикционный тормозной механизм 22 снабжен тормозным диском 22а, который закреплен на колесе транспортного средства, и тормозным суппортом 22b, который закреплен на корпусе транспортного средства. Фрикционный тормозной механизм 22 создает гидравлическую тормозную силу, путем приведения в действие колесного цилиндра, встроенного в тормозной суппорт 22b, посредством гидравлического давления гидравлического масла, подаваемого из тормозного привода 21, и прижатием тормозной колодки к тормозному диску 22а.
[0032] Тормозной привод 21 представляет собой известный привод, который регулирует гидравлическое давление, подаваемое в колесный цилиндр, встроенный в тормозной суппорт 22b. Тормозной привод 21 создает усилие торможения на правом, левом, передних и задних колесах, подавая гидравлическое давление в колесный цилиндр в зависимости от управляющей команды от ЭБУ 20 торможения.
[0033] ЭБУ 30 рулевого управления представляет собой устройство управления электроусилителем рулевого управления. ЭБУ 30 рулевого управления соединен с приводом 31 двигателя. Привод 31 двигателя соединен с электродвигателем 32 рулевого привода. Электродвигатель 32 рулевого привода встроен в механизм рулевого управления (не показан) и управляет правым и левым рулевыми колесами посредством вращения ротора, приводимого в действие электроэнергией, подаваемой от привода 31 двигателя.
[0034] Как правило, ЭБУ 30 рулевого управления определяет крутящий момент рулевого управления и формирует вспомогательный крутящий момент в зависимости от крутящего момента рулевого управления в электродвигателе 32 рулевого управления. В случае, когда принимается команда рулевого управления для предотвращения столкновений, которая передается от опорного ЭБУ 10, когда никакие операции рулевым колесом не выполняются водителем, при этом, ЭБУ 30 рулевого управления управляет рулевыми колесами путем управления приведением в действие электродвигателя 32 рулевого управления в соответствии с командой рулевого управления.
[0035] ЭБУ 40 сигнализации соединен со звуковым сигналом 41 и дисплеем 42. ЭБУ 40 сигнализации обращает внимание водителя посредством звукового сигнала 41, в соответствии с командой от опорного ЭБУ 10, и отображает состояние операции управления обеспечением предотвращения столкновения с помощью дисплея 42 в случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием.
[0036] Далее будет приведено описание процесса функционирования опорного ЭБУ 10. Сосредоточивая внимание на описании функционирования опорного ЭБУ 10, опорный ЭБУ 10 снабжен блоком 11 распознавания полосы движения транспортного средства с хост-компьютером, блоком 12 вычисления траектории движения транспортного средства с хост-компьютером, блоком 13 вычисления траектории трехмерного объекта, блоком 14 определения препятствия, блоком 15 определения столкновения, блоком 16 вычисления целевого значения замедления, блоком 17 вычисления целевой траектории для предотвращения столкновения и блоком 18 управления.
[0037] Блок 11 распознавания полосы движения транспортного средства с хост-компьютером формирует информацию, относящуюся к дороге, по которой транспортное средство с хост-компьютером должно двигаться в будущем, на основании информации целевого объекта, которая передается от датчика 51 окружающей обстановки. Например, блок 11 распознавания полосы движения транспортного средства с хост-компьютером формирует информацию о географических координатах (позиционная информация), трехмерном объекте и белой линии, используя положение середины переднего края транспортного средства с хост-компьютером в качестве отправной точки, и используя систему координат, проходящую в горизонтальном направлении и вперед от отправной точки. Таким образом, блок 11 распознавания полосы движения транспортного средства с хост-компьютером улавливает форму полосы движения транспортного средства с хост-компьютером, которая отделяется правой и левой белыми линиями, положение и ориентацию транспортного средства с хост-компьютером на полосе движения, и взаимное расположение поверхности земли и трехмерного объекта относительно транспортного средства с хост-компьютером. Блок 11 распознавания полосы движения транспортного средства с хост-компьютером обновляет информацию о координатах каждый раз, когда принимается информация целевого объекта, которая передается от датчика 51 окружающей обстановки.
[0038] Блок 12 вычисления траектории движения транспортного средства с хост-компьютером вычисляет радиус поворота транспортного средства с хост-компьютером на основании угловой скорости рыскания, регистрируемой датчиком 53 угловой скорости рыскания, и скорости транспортного средства, определенной датчиком 54 скорости транспортного средства, и на основе величины радиуса поворота вычисляет траекторию движения транспортного средства с хост-компьютером.
[0039] Блок 13 вычисления траектории трехмерного объекта распознает на основании изменения позиции трехмерного объекта, является трехмерный объект движущимся объектом или неподвижным объектом. В случае, когда трехмерный объект является движущимся объектом, блок 13 вычисления траектории трехмерного объекта вычисляет траекторию трехмерного объекта. Например, скорость, с которой трехмерный объект движется в продольном направлении (направление, в котором движется транспортное средство с хост-компьютером), можно вычислить из соотношения между скоростью транспортного средства с хост-компьютером и относительных скоростей транспортного средства с хост-компьютером и трехмерного объекта. Кроме того, скорость, с которой трехмерный объект движется в горизонтальном направлении, можно вычислить, например, из величины изменения расстояния между положением бокового края трехмерного объекта и белой линии, которая определяется датчиком 51 окружающей обстановки. Блок 13 вычисления траектории трехмерного объекта вычисляет траекторию трехмерного объекта, основываясь на этих скоростях, с которой трехмерный объект перемещается в продольном направлении и в горизонтальном направлении. В качестве альтернативы, блок 13 вычисления траектории трехмерного объекта может рассчитать траекторию трехмерного объекта на основании вычисленной траектории транспортного средства с хост-компьютером и расстояния между транспортным средством с хост-компьютером и трехмерным объектом, которое определяется с помощью датчика 51 окружающей обстановки.
[0040] Блок 14 определения препятствия определяет, основываясь на траектории транспортного средства с хост-компьютером и траектории трехмерного объекта, столкнется ли или нет транспортное средство с хост-компьютером с трехмерным объектом в случае, когда трехмерный объект сохраняет текущий режим движения (стационарное состояние в случае, когда трехмерный объект является неподвижным объектом), и транспортное средство с хост-компьютером сохраняет текущий режим движения. В случае, когда определяется, на основании результата этого определения, что транспортное средство с хост-компьютером столкнется с трехмерным объектом, то блок 14 определения препятствия распознает трехмерный объект в качестве препятствия.
[0041] Блок 15 определения столкновения вычисляет прогнозируемое время до столкновения TTC (time to collision), которое является прогнозируемым периодом времени до столкновения между транспортным средством с хост-компьютером и препятствием (время до столкновения), с помощью следующего уравнения (1) на основании расстояния L между препятствием и транспортным средством с хост-компьютером и относительной скорости Vr транспортного средства с хост-компьютером по отношению к препятствию.

В случае, когда прогнозируемое время до столкновения TTC равно или короче, чем пороговое значение TTC0 для определения столкновения, которое установлено заранее, то блок 15 определения столкновения определяет, что транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием.
[0042] В случае, когда установлено, что транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием, блок 16 вычисления целевого значения величины замедления вычисляет целевое значение величины замедления для торможения транспортного средства с хост-компьютером. В случае, когда препятствие неподвижно, например, пройденное расстояние X до остановки транспортного средства с хост-компьютером, может быть рассчитано с использованием следующей формулы (2), в которой V является скоростью транспортного средства с хост-компьютером (= относительная скорость) в настоящий момент времени, а является значением величины замедления транспортного средства с хост-компьютером, t представляет собой продолжительность времени до остановки транспортного средства.

Кроме того, время t до остановки транспортного средства может быть представлено следующим уравнением (3).

Соответственно, когда уравнение (2) заменяется уравнением (3), значение величины а торможения, необходимое для остановки транспортного средства с хост-компьютером на пройденном расстоянии D, может быть представлено следующим уравнением (4).

Чтобы транспортное средство с хост-компьютером остановилось на расстоянии β перед препятствием, это пройденное расстояние D может быть приравнено к расстоянию (L-β), полученному путем вычитания расстояния β из расстояния L, регистрируемого датчиком 51 окружающей обстановки. В случае, когда препятствие находится в движении, значение а величины замедления может быть вычислено с использованием относительной скорости Vr вместо скорости транспортного средства V.
[0043] Блок 16 вычисления целевого значения величины замедления устанавливает значение величины замедления, рассчитанное, как описано выше, как целевое значение величины замедления. В этом случае, значение величины замедления, которое может быть вызвано у транспортного средства, имеет предельное значение (например, приблизительно -1G). Соответственно, в случае, когда абсолютное значение вычисленного целевого значения величины замедления превышает верхнее предельное значение, абсолютное значение целевого значения величины замедления устанавливается на верхнее предельное значение заранее.
[0044] Блок 17 вычисления целевой траектории для предотвращения столкновения вычисляет целевую траекторию уклонения, которая может быть применена для транспортного средства с хост-компьютером для предотвращения столкновения с препятствием. Например, блок 17 вычисления целевой траектории для предотвращения столкновения устанавливает путь A, по которому, как предполагается, может пройти транспортное средство C с хост-компьютером в случае сохранения транспортным средством C с хост-компьютером текущего режима движения, как показано на фиг. 2. Затем блок 17 вычисления целевой траектории для предотвращения столкновения устанавливает путь B1, по которому транспортное средство C с хост-компьютером, как предполагается, проследует в случае, когда максимальная величина изменения ΔGy в поперечной силе для безопасного поворота транспортного средства C с хост-компьютером на текущей скорости транспортного средства C с хост-компьютером добавляется к текущему боковому ускорению Gy0 транспортного средства C с хост-компьютером, и устанавливает путь B2, по которому транспортное средство с хост-компьютером, как предполагается, проследует в противоположном случае, когда максимальная величина изменения ΔGy вычитается из текущего бокового ускорения Gy0 транспортного средства C с хост-компьютером.
[0045] Блок 17 вычисления целевой траектории для предотвращения столкновения формирует, в качестве возможной траектории предотвращения столкновения, путь B0, относящийся к случаю, когда боковое ускорение изменяется на заранее определенную величину посредством заранее заданной величины в пределах диапазона AR (диапазон движения) от пути B1 до пути B2. Блок 17 вычисления целевой траектории для предотвращения столкновения определяет, как траекторию уклонения, траекторию, на которой транспортное средство C с хост-компьютером может избежать столкновения, не воздействуя на препятствие, путем поворота, на основании степени пересечения между возможной траекторией отклонения и препятствием.
[0046] Траектория движения для предотвращения столкновения представляет собой диапазон, в котором транспортное средство C с хост-компьютером не выезжает за пределы полосы движения и ограничено диапазоном, в котором поддерживается сцепление с поверхностью земли. Кроме того, направление, в котором однозначно определяется, что столкновение с препятствием будет предотвращено (горизонтальное направление), рассматривается, как условие для использования автоматического рулевого управления. В случае, когда препятствие O присутствует с левой стороны на полосе движения впереди транспортного средства C с хост-компьютером, как показано на фиг. 3, например, пространство справа от препятствия O на полосе движения определяется, как пространство SP для предотвращения столкновения, и траектория движения для предотвращения столкновения определяется, как траектория движения через пространство SP. После определения траектории уклонения, блок 17 вычисления целевой траектории для предотвращения столкновения вычисляет целевую угловую скорость рыскания для обеспечения движения транспортного средства C с хост-компьютером по траектории предотвращения столкновения.
[0047] Блок 18 управления передает в ЭБУ 20 торможения команду торможения для предотвращения столкновения, которая представляет собой целевое значение величины замедления, которое рассчитывается с помощью блока 16 вычисления целевого значения величины замедления. ЭБУ 20 торможения управляет тормозным приводом 21 и формирует фрикционное тормозное усилие на колесе транспортного средства в соответствии с целевым значением величины замедления. Затем происходит (выполняется) автоматическое торможение.
[0048] Кроме того, блок 18 управления вычисляет величину целевого угла поворота рулевого колеса, при котором достигается целевая угловая скорость рыскания на основании целевой угловой скорости рыскания, которая рассчитывается блоком 17 вычисления целевой траектории для предотвращения столкновения, и скорости транспортного средства с хост-компьютером, и передает команду рулевого управления для предотвращения столкновений, которая представляет этот целевой угол поворота рулевого колеса, в ЭБУ 30 рулевого управления. ЭБУ 30 рулевого управления приводит в действие двигатель 32 рулевого механизма и осуществляет управления рулевым колесом в соответствии с целевым углом поворота рулевого колеса. Затем происходит (выполняется) воздействие автоматического рулевого управления. В случае, когда автоматическое рулевое управление запрещено при выполнении процедуры управления обеспечением предотвращения столкновений (описан ниже), блок 18 управления не передает команду рулевого управления для предотвращения столкновений в ЭБУ 30 рулевого управления.
[0049] В случае, когда определяется, что водитель осуществляет управление посредством руля, в то время, когда выполняется автоматическое рулевое управление, ЭБУ 30 рулевого управления прекращает выполнение автоматического рулевого управления и осуществляет рулевое управление в соответствии с операцией рулевого управления, выполняемой водителем (управление крутящим моментом).
[0050] <Процедура 1 управления обеспечением предотвращения столкновений>
Ниже будет приведено описание управления обеспечением предотвращения столкновений, которое выполняется с помощью опорного ЭБУ 10. Фиг. 4 иллюстрирует блок-схему процедуры управления обеспечением предотвращения столкновений, которая выполняется опорным ЭБУ 10. Процедура управления обеспечением предотвращения столкновений выполняется посредством описанных выше функциональных блоков с 11 по 18, которые работают совместно друг с другом. Процедура управления обеспечением предотвращения столкновений многократно выполняется с заранее заданной периодичностью вычислений, когда ключ зажигания остается включенным. Эта периодичность вычислений, например, может быть такой же периодичностью, с которой датчик 51 окружающей обстановки передает информацию о целевом объекте. Процедура управления обеспечением предотвращения столкновений будет описана в отношении также других вариантов осуществления и, таким образом, процедура управления обеспечением предотвращения столкновений, которая описана впервые (фиг. 4), будет упоминаться далее, как процедура 1 управления обеспечением предотвращения столкновений.
[0051] На этапе S11, после начала выполнения процедуры 1 управления обеспечением предотвращения столкновений, опорный ЭБУ 10 получает информацию о целевом объекте с фронтальной части хост-транспортного средства, регистрируемую датчиком 51 окружающей обстановки. Затем, на этапе S12, опорный ЭБУ 10 определяет наличие или отсутствие препятствия на основании, например, положения и ориентации транспортного средства с хост-компьютером на полосе движения и относительного положения трехмерного объекта по отношению к транспортному средству с хост-компьютером на основании информации о целевом объекте, и определяет пространство для предотвращения столкновения (целевую траекторию для предотвращения столкновения) для уклонения от препятствия.
[0052] Затем, на этапе S13, опорный ЭБУ 10 определяет возможность столкновения между транспортным средством с хост-компьютером и препятствием используя прогнозируемое время TTC до столкновения. В случае, когда прогнозируемое время TTC до столкновения длиннее, чем пороговое значение TTC0 для определения столкновения, то есть в случае, когда установлено, что транспортное средство с хост-компьютером вряд ли столкнется с препятствием, опорный ЭБУ 10 временно прекращает выполнение процедуры 1 управления обеспечением предотвращения столкновения. Опорный ЭБУ 10 осуществляет выполнение процедуры 1 управления обеспечением предотвращения столкновения с заранее заданной периодичностью вычислений. Когда обнаружено, что препятствие находится перед транспортным средством с хост-компьютером и обнаружено, что прогнозируемое время TTC до столкновения относительно препятствия, равно или меньше, чем пороговое значение TTC0 для определения столкновения, во время того, как выполнение этапов S11-S13 повторяется (S13: Да), то опорный ЭБУ 10 передает команду торможения для предотвращения столкновения в ЭБУ 20 торможения и формирует фрикционное тормозное усилие в правом, левом, переднем и заднем колесах на этапе S14. Эта команда торможения, например, представляет собой команду на замедление, величина которого рассчитывается в соответствии с описанным выше уравнением (4). Таким образом, выполняется автоматическое торможение. Таким образом, опорный ЭБУ 10 содействует водителю таким образом, чтобы транспортное средство с хост-компьютером могло избежать столкновения с препятствием.
[0053] Затем, на этапе S15, опорный ЭБУ 10 оценивает величину замедления транспортного средства с хост-компьютером в данный момент времени. В этом случае, опорный ЭБУ 10 оценивает величину замедления транспортного средства с хост-компьютером на основании значения величины изменения (дифференциальное значение) скорости транспортного средства, которое регистрируется датчиком 54 скорости транспортного средства (или скорости колеса транспортного средства, которая регистрируется датчиком скорости вращения колеса транспортного средства), или продольного ускорения, которое регистрируется датчиком 55 ускорения. Несмотря на то, что процедура 1 управления обеспечением предотвращения столкновения повторяется с заранее заданной периодичностью вычислений, выполнение этапа S15 может быть осуществлено после истечения заранее заданного короткого периода времени с момента начала автоматического торможения (после того, как замедление производится) только в случае первоначального выполнения автоматического торможения после воздействия.
[0054] Затем, на этапе S16, вычисляется прогнозируемая относительная скорость транспортного средства с хост-компьютером по отношению к препятствию в такой точке, где прогнозируется вероятность столкновения с препятствием транспортного средства с хост-компьютером, после движения транспортного средства с хост-компьютером во время замедления за счет воздействия автоматического торможения (далее упоминаемого, как прогнозируемая точка столкновения). Эта прогнозируемая относительная скорость будет упоминаться, как прогнозируемая скорость Vx при столкновении.
[0055] Например, время t до столкновения между транспортным средством с хост-компьютером и препятствием находится из следующего реляционного выражения (5), в котором Vr является относительной скоростью транспортного средства с хост-компьютером в данный момент времени, L является расстоянием между транспортным средством с хост-компьютером и препятствием, а является значением величины замедления транспортного средства с хост-компьютером (величина замедления, рассчитанная на этапе S15).

Соответственно, прогнозируемая скорость Vx при столкновении, которая является относительной скоростью в момент времени t, вычисляется в соответствии со следующим уравнением (6).

Этот расчет выполняется с учетом того, что препятствие не увеличивает скорость движения и не замедляет скорость (остается на постоянной скорости, или остается неподвижным объектом).
[0056] Затем, на этапе S17, опорный ЭБУ 10 исполняет определение выполнения воздействия на рулевое управление, что означает необходимость предотвращения столкновений путем воздействия автоматического рулевого управления. В этом случае, определение «Да» делается в случае, когда удовлетворяются два условия, одним из которых является превышение прогнозируемой скорости Vx при столкновении нулевого значения, то есть, ситуация, в которой транспортное средство с хост-компьютером не может быть остановлено перед препятствием за счет применения только автоматического торможения, и другим условием является наличие пространства для предотвращения столкновения (целевая траектория предотвращения столкновения) для объезда препятствия, которое находится на полосе движения.
[0057] В случае, когда определением выполнения воздействия на рулевое управление является «Нет» (S17: Нет), то опорный ЭБУ 10 временно прекращает выполнение процедуры 1 управления обеспечением предотвращения столкновения. Затем опорный ЭБУ 10 повторяет вышеописанный процесс обработки с заранее заданной периодичностью вычисления. В этом случае, обеспечение предотвращения столкновения между транспортным средством с хост-компьютером и препятствием осуществляется посредством только автоматического торможения.
[0058] В случае, когда определением выполнения воздействия на рулевое управления является «Да», то опорный ЭБУ 10 определяет на этапе S18, равна или меньше прогнозируемая скорость Vx при столкновении порогового значения прогнозируемой скорости Vxref при столкновении. Это пороговое значение прогнозируемой скорости Vxref при столкновении является значением, которое устанавливается, как верхний предел диапазона прогнозируемой скорости Vx при столкновении, при которой может быть выполнено автоматическое рулевое управление с высокой точностью.
[0059] В случае, когда прогнозируемая скорость Vx при столкновении равна или меньше, чем пороговое значение прогнозируемой скорости Vxref при столкновении (S18: Да), опорный ЭБУ 10 осуществляет автоматическое рулевое управление на этапе S19. Другими словами, опорный ЭБУ 10 передает в ЭБУ 30 рулевого управления команду рулевого управления для предотвращения столкновения, которая представляет целевой угол поворота рулевого колеса для движения транспортного средства с хост-компьютером по траектории для предотвращения столкновения. Затем выполняется автоматическое рулевое управление. В случае, когда прогнозируемая скорость Vx при столкновении превышает пороговое значение прогнозируемой скорости Vxref при столкновении (S18: Нет), то, напротив, опорный ЭБУ 10 временно прекращает выполнение процедуры 1 управления обеспечением предотвращения столкновения. В этом случае, обеспечение предотвращения столкновения между транспортным средством с хост-компьютером и препятствием выполняется только посредством автоматического торможения.
[0060] Таким образом, в соответствии с процедурой 1 управления обеспечением предотвращения столкновения автоматическое рулевое управление воздействует только в случае, когда транспортное средство с хост-компьютером с высокой степенью вероятности столкнется с препятствием, несмотря на вмешательство автоматического торможения, и прогнозируемая скорость Vx при столкновении равна или меньше, чем пороговое значение прогнозируемой скорости Vxref при столкновении.
[0061] В случае, когда процесс предупреждения столкновения осуществляется посредством использования автоматического рулевого управления, надежность предотвращения столкновений во время автоматического рулевого управления снижается, так как относительная скорость транспортного средства с хост-компьютером по отношению к препятствию возрастает. Например, боковые и продольные положения направления движения транспортного средства с хост-компьютером по отношению к препятствию (траектория движения), скорее всего, будут изменяться, так как относительная скорость увеличивается, несмотря на осуществление управления углом поворота рулевого колеса на ту же величину при рулевом управлении. В этом случае, транспортное средство не может быть перемещено в целевое пространство для предотвращения столкновения, в некоторых случаях. В связи с этим, в данном варианте осуществления, оценивается прогнозируемая скорость Vx при столкновении в прогнозируемой точке столкновения, где транспортное средство с хост-компьютером, как предполагается, столкнется с препятствием, и не допускается воздействие автоматического рулевого управления в случае, когда прогнозируемая скорость Vx при столкновении превышает пороговое значение прогнозируемой скорости Vxref при столкновении.
[0062] Следовательно, в соответствии с этим вариантом осуществления, воздействие автоматического рулевого управления может быть выполнено надлежащим образом в случае, когда автоматическое рулевое управление выполняется в дополнение к автоматическому торможению.
[0063] <Модифицированный пример процедуры 1 управления обеспечением предотвращения столкновения>
Далее будет приведено описание модифицированного примера процедуры 1 управления обеспечением предотвращения столкновения. В этом модифицированном примере в процедуру 1 управления обеспечением предотвращения столкновения, например, между этапом S17 и этапом S18 добавлены этапы с S21 по S23, в соответствии с вариантом осуществления, как показано на фиг. 5. Те же самые номера этапов, как и в процедуре 1 управления обеспечением предотвращения столкновения будут использоваться на чертежах для обозначения такого же процесса обработки, как и в процедуре 1 управления обеспечением предотвращения столкновения, и их описание будет опущено. В последующем описании будут описаны только процессы обработки, отличающиеся от тех, что описаны в процедуре 1 управления обеспечением предотвращения столкновения.
[0064] В случае, когда определением выполнения воздействия на рулевое управление является «Да» на этапе S17, то есть, если определено, что для предотвращения столкновения необходимо воздействие автоматического рулевого управления, то опорный ЭБУ 10 разрешает выполнение процесса обработки переходом к этапу S21. На этапе S21, опорный ЭБУ 10 распознает препятствие, как неподвижный объект или движущийся объект, в качестве цели для предотвращения столкновения. В случае, когда установлено, что препятствие является неподвижным объектом, то опорный ЭБУ 10 на этапе S22 устанавливает пороговое значение прогнозируемой скорости Vxref при столкновении на первое пороговое значение прогнозируемой скорости Vxref1 при столкновении. В случае, когда установлено, что препятствие является движущимся объектом, то опорный ЭБУ 10 на этапе S23 устанавливает пороговое значение прогнозируемой скорости Vxref при столкновении на второе пороговое значение прогнозируемой скорости Vxref2 при столкновении. В случае, когда невозможно однозначно распознать, является ли препятствие неподвижным объектом или движущимся объектом, то опорный ЭБУ 10 рассматривает этот объект, как движущийся объект.
[0065] Первое пороговое значение прогнозируемой скорости Vxref1 при столкновении является значением, которое устанавливается на верхнее предельное значение диапазона прогнозируемой скорости Vx при столкновении, при котором процесс автоматического рулевого управления может быть надежно выполнен для неподвижного объекта. Второе пороговое значение прогнозируемой скорости Vxref2 при столкновении является значением, которое устанавливается на верхнее предельное значение диапазона прогнозируемой скорости Vx при столкновении, при котором процесс автоматического рулевого управления может быть надежно выполнен для подвижного объекта. Соответственно, второе пороговое значение прогнозируемой скорости Vxref2 при столкновении установлено на скорость транспортного средства ниже первого порогового значения прогнозируемой скорости Vxref1 при столкновении.
[0066] После установки порогового значения прогнозируемой скорости Vxref при столкновении на этапе S22 или этапе S23, опорный ЭБУ 10 разрешает выполнение процесса обработки переходом к этапу S18, и определяет, является ли прогнозируемая скорость Vx при столкновении равной или меньше, чем пороговое значение прогнозируемой скорости Vxref при столкновении. Затем опорный ЭБУ 10 выполняет процесс автоматического рулевого управления только в том случае, когда прогнозируемая скорость Vx при столкновении равна или меньше, чем пороговое значение прогнозируемой скорости Vxref при столкновении.
[0067] В соответствии с этим модифицированным примером пороговое значение прогнозируемой скорости Vxref при столкновении устанавливается на более высокое значение в случае, когда препятствие является неподвижным объектом, чем в случае, когда препятствие является движущимся объектом.
[0068] Величину перемещения препятствия необходимо принимать во внимание в случае, когда для предотвращения столкновений используется автоматическое рулевое управление, и изменение величины перемещения происходит в том случае, когда препятствие является движущимся объектом. Соответственно, в случае, когда препятствие является движущимся объектом (в том числе, в случае, когда тип препятствия неизвестен), направление движения транспортного средства с хост-компьютером, основанное на автоматическом рулевом управлении, необходимо контролировать с высокой степенью точности. В случае, когда препятствие является неподвижным объектом, напротив, точность контроля за направлением движения, основанном на автоматическом рулевом управлении, может быть снижена по сравнению со случаем, когда препятствие является движущимся объектом.
[0069] В этом варианте осуществления пороговое значение прогнозируемой скорости Vxref при столкновении устанавливается на более высокое значение в случае, когда препятствие является неподвижным объектом, чем в случае, когда препятствие является движущимся объектом. Соответственно, автоматическое рулевое управление, скорее всего, применяется в случае, когда препятствие является неподвижным объектом, чем в случае, когда препятствием является движущийся объект. Следовательно, согласно этому модифицированному примеру 1, соответствующее воздействие автоматического рулевого управления может быть выполнено в соответствии с типом препятствия (движущийся объект/неподвижный объект).
[0070] Пороговое значение прогнозируемой скорости Vxref при столкновении, которое используется на этапе S18 вышеописанной процедуры 1 управления обеспечением предотвращения столкновения (фиг. 4), может быть установлено на значение, которое эквивалентно второму пороговому значению прогнозируемой скорости Vxref2 при столкновении. Затем направление движения транспортного средства с хост-компьютером, основанное на применении автоматического рулевого управления, может регулироваться с высокой степенью точности независимо от типа препятствия (движущийся объект/неподвижный объект).
[0071] <Процедура 2 управления обеспечением предотвращения столкновений>
Здесь и далее другой вариант выполнения процедуры управления обеспечением предотвращения столкновений (в дальнейшем называемый, как процедура 2 управления обеспечением предотвращения столкновений) будет описан ниже. На фиг. 6 изображена блок-схема, иллюстрирующая процедуру 2 управления обеспечением предотвращения столкновений. Эта процедура 2 управления обеспечением предотвращения столкновений является процедурой 1 управления обеспечением предотвращения столкновений (включающей в себя ее модифицированный пример), к которой добавлен процесс обработки на этапе S31. Те же самые номера этапов, как в процедуре 1 управления обеспечением предотвращения столкновений, будут использоваться на чертежах для обозначения такого же процесса обработки, как и в процедуре 1 управления обеспечением предотвращения столкновений, и их описание будет опущено. В последующем описании будут описаны только процессы, отличающиеся от аналогичных в процедуре 1 управления обеспечением предотвращения столкновений.
[0072] После начала автоматического торможения на этапе S14, опорный ЭБУ 10 определяет на этапе S31, равен или нет индикатор F запрета рулевого управления «0». Этот индикатор F запрета рулевого управления устанавливается посредством процедуры установки индикатора, которая показана на фиг. 7. Процедура установки индикатора повторно выполняется с заранее заданной периодичностью вычислений с помощью опорного ЭБУ 10 при осуществлении процедуры 2 управления обеспечением предотвращения столкновений.
[0073] На этапе S41 процедуры установки индикатора, опорный ЭБУ 10 определяет, является ли настоящий момент времени временем, когда запускается автоматическое торможение. Другими словами, определяется, является ли или нет настоящий момент времени временем сразу после начала автоматического торможения, которое выполняется на этапе S14 процедуры управления обеспечением предотвращения столкновений. Хотя опорный ЭБУ 10 повторяет процедуру установки индикатора с заранее заданной периодичностью вычисления, опорный ЭБУ 10 делает определение «Да» на этапе S41, только в первый раз, сразу же после начала автоматического торможения. В случае, когда настоящий момент времени не следует сразу после начала автоматического торможения, опорный ЭБУ 10 временно завершает процедуру установки индикатора.
[0074] В случае, когда настоящий момент времени является временем сразу после начала автоматического торможения, опорный ЭБУ 10 определяет скорость Vb во время воздействия торможения, которая представляет собой относительную скорость транспортного средства с хост-компьютером по отношению к препятствию в данный момент времени, и определяет, действительно ли скорость Vb во время воздействия торможения равна или меньше, чем пороговое значение скорости Vbref в условиях воздействия торможения на этапе S42. В случае, когда скорость Vb во время воздействия торможения равна или меньше, чем пороговое значение скорости Vbref в условиях воздействия торможения (S42: Да), опорный ЭБУ 10 устанавливает индикатор F запрета рулевого управления на «0» на этапе S43. В случае, когда скорость Vb во время воздействия торможения превышает пороговое значение скорости Vbref в условиях воздействия торможения (S42: Нет), то опорный ЭБУ 10 устанавливает индикатор F запрета рулевого управления на «1» на этапе S44. Индикатор F запрета рулевого управления на «1» представляет собой ситуацию, при которой запрещается выполнение автоматического рулевого управления, а индикатор F запрета рулевого управления на «0» представляет собой ситуацию, при которой применение автоматического рулевого управления не запрещено.
[0075] После установки индикатора F запрета рулевого управления на этапе S43 или на этапе S44, опорный ЭБУ 10 временно завершает процедуру установки индикатора. Индикатор F запрета рулевого управления сбрасывается на «0», например, в момент времени, когда последовательность выполнения процесса обеспечения предупреждения столкновений прекращается (момент времени, когда обнаруживается выполнение предотвращения столкновения, или момент времени, когда определенный период времени истек с момента начала процесса автоматического торможения).
[0076] Переходя обратно к выполнению процедуры 2 управления обеспечением предотвращения столкновений, опорный ЭБУ 10 считывает индикатор F запрета рулевого управления, установленный при процедуре установки индикатора, и определяет, установлен ли индикатор F запрета рулевого управления на «0» на этапе S31. В случае, когда индикатор F запрета рулевого управления равен «0» (S31: Да), опорный ЭБУ 10 разрешает выполнение перехода к этапу S15 и выполняет вышеописанную обработку.
[0077] В случае, когда на этапе S31 определено, что индикатор F запрета рулевого управления установлен на «1», то воздействие автоматического рулевого управления запрещено и, таким образом, процедура 2 управления обеспечением предотвращения столкновений временно прекращена. Соответственно, выполняется только автоматическое торможение без воздействия автоматического рулевого управления.
[0078] При выполнении процедуры 2 управления обеспечением предотвращения столкновений, регистрируется скорость Vb во время применения торможения, и определяется, превышает ли регистрируемая скорость Vb во время применения торможения пороговое значение скорости Vbref в условиях применения торможения в момент воздействия автоматического торможения. В ситуации, в которой прогнозируется, что транспортное средство с хост-компьютером столкнется с препятствием, несмотря на воздействие автоматического торможения, скорость транспортного средства с хост-компьютером уменьшается с замедлением, величина которого близка к предельной, и, таким образом, величина замедления не подвергается существенным изменениям. Соответственно, прогнозируемая скорость при столкновении может быть оценена до некоторой степени посредством оценки скорости Vb во время применения торможения.
[0079] При выполнении процедуры 2 управления обеспечением предотвращения столкновений, воздействие автоматического рулевого управления запрещается в случае, когда скорость Vb во время применения торможения выше, чем пороговое значение скорости Vbref в условиях воздействия торможения. Следовательно, в соответствии с процедурой 2 управления обеспечением предотвращения столкновений, воздействие автоматического рулевого управления может быть разрешено только в случае, когда предполагается, что управление направлением движения транспортного средства с хост-компьютером может быть выполнено с высокой точностью в текущей ситуации, как и при выполнении процедуры 1 управления обеспечением предотвращения столкновений. Кроме того, запрет на воздействие автоматического рулевого управления может быть определен в момент времени, когда определено, что скорость Vb во время воздействия торможения выше, чем пороговое значение скорости Vbref в условиях воздействия торможения, то есть, на раннем этапе, на котором применяется автоматическое торможение. Соответственно, последующая вычислительная нагрузка на микрокомпьютер может быть уменьшена.
[0080] При выполнении процедуры 2 управления обеспечением предотвращения столкновений, выполнение определения запрета на использование автоматического рулевого управления, основанное на прогнозируемой скорости Vx при столкновении, осуществляется после этапа S15. Однако, выполнение определения запрета на использование автоматического рулевого управления, основанное на прогнозируемой скорости Vx при столкновении, является допустимым и может быть опущено. Другими словами, определение запрещено или нет автоматическое рулевое управление может быть основано исключительно на определении того, что скорость Vb во время воздействия торможения выше, чем пороговое значение скорости Vbref в условиях воздействия торможения (как само собой разумеется, использование автоматического рулевого управления запрещается в случае отсутствия предупреждения о столкновении при движении в полосе движения).
[0081] <Модифицированный пример процедуры установки индикатора>
В дальнейшем будет приведено описание модифицированного примера процедуры установки индикатора (далее упоминаемого как процедура 2 установки индикатора). Фиг. 8 представляет собой блок-схему процедуры, показывающую процедуру 2 установки индикатора. В этой процедуре 2 установки индикатора процессы обработки на этапах с S45 по S47 добавляются между этапом S41 и этапом S42, в описанной выше процедуре установки индикатора, показанной на фиг. 7 (далее упоминаемой, как процедура 1 установки индикатора). Те же самые номера этапов, как и в процедуре 1 установки индикатора, будут использоваться на чертежах для обозначения такого же процесса обработки, как и в процедуре 1 установки индикатора, и их описание будет опущено. В последующем описании, будут описаны только процессы обработки, отличающиеся от таковых в процедуре 1 установки индикатора.
[0082] В случае, когда на этапе S41 определено, что настоящий момент времени является моментом времени, когда инициируется процесс автоматического торможения, опорный ЭБУ 10 разрешает выполнение процесса перехода к этапу S45. На этапе S45, опорный ЭБУ 10 определяет, является ли препятствие, как целевое для предотвращения столкновения, неподвижным объектом или движущимся объектом. В случае, когда установлено, что препятствие является неподвижным объектом, опорный ЭБУ 10 устанавливает пороговое значение скорости Vbref транспортного средства в условиях воздействия автоматического торможения на первое пороговое значение скорости Vbref1 транспортного средства в условиях воздействия автоматического торможения на этапе S46. В случае, когда установлено, что препятствием является движущийся объект, то опорный ЭБУ 10 устанавливает пороговое значение скорости Vbref транспортного средства в условиях воздействия автоматического торможения на второе пороговое значение скорости Vbref2 транспортного средства в условиях воздействия автоматического торможения на этапе S47. В случае, когда определение типа препятствия невозможно, опорный ЭБУ 10 действует, рассматривая препятствие, как движущийся объект.
[0083] Первое пороговое значение скорости Vbref1 транспортного средства в условиях воздействия автоматического торможения является пороговым значением скорости транспортного средства в условиях воздействия автоматического торможения, при котором, как оценивается, пороговое значение прогнозируемой скорости Vxref транспортного средства в условиях столкновения, по существу, равно первому пороговому значению прогнозируемой скорости Vxref1 транспортного средства в условиях столкновения. Второе пороговое значение скорости Vbref2 транспортного средства в условиях воздействия автоматического торможения является пороговым значением скорости транспортного средства, при котором, как оценивается, пороговое значение прогнозируемой скорости Vxref транспортного средства, по существу, равно второму пороговому значению прогнозируемой скорости Vxref2. Соответственно, второе пороговое значение скорости Vbref1 транспортного средства в условиях воздействия автоматического торможения устанавливается на скорость транспортного средства, которая ниже, чем первое пороговое значение скорости Vbref1 транспортного средства в условиях воздействия автоматического торможения.
[0084] После установки порогового значения скорости Vbref транспортного средства в условиях воздействия автоматического торможения на этапе S46 или этапе S47, опорный ЭБУ 10 разрешает выполнение перехода к этапу S42, и устанавливает индикатор F запрета рулевого управления, на основании того, равна или меньше скорость Vb во время воздействия торможения в данный момент времени, чем пороговое значение скорости Vbref транспортного средства в условиях воздействия автоматического торможения, с использованием порогового значения скорости Vbref транспортного средства в условиях воздействия автоматического торможения.
[0085] Посредством применения процедуры 2 установки индикатора, соответствующее воздействие автоматического рулевого управления может быть выполнено в соответствии с типом препятствия (движущийся объект/неподвижный объект).
[0086] <Модифицированный пример прогнозирования скорости Vx столкновения>
В вышеописанных процедурах 1 и 2 управления обеспечением предотвращения столкновений и в их модифицированных примерах, прогнозируемая относительная скорость транспортного средства с хост-компьютером относительно препятствия в прогнозируемой точке столкновения используется, как прогнозируемая скорость Vx при столкновении. Тем не менее, скорость транспортного средства с хост-компьютером в прогнозируемой точке столкновения также может быть использована вместо этого. Точность управления направлением движения транспортного средства с хост-компьютером по отношению к препятствию может быть снижена, поскольку скорость транспортного средства с хост-компьютером возрастает. В связи с этим, эффекты, аналогично варианту осуществления, могут быть достигнуты даже при использовании скорости транспортного средства с хост-компьютером в прогнозируемой точке столкновения, так как прогнозируемая скорость Vx при столкновении определяет запрет на вмешательство автоматического рулевого управления. В этом случае, прогнозируемая скорость Vx при столкновении может быть вычислена с учетом относительной скорости Vr в уравнении (6), при замене скорости V транспортного средства с хост-компьютером.
[0087] <Модифицированный пример определения скорости Vb во время воздействия торможения>
В вышеописанных процедурах 1 и 2 управления обеспечением предотвращения столкновений и в их модифицированных примерах, прогнозируемая относительная скорость транспортного средства с хост-компьютером относительно препятствия в прогнозируемой точке столкновения используется в качестве скорости Vb во время воздействия торможения. Тем не менее, скорость транспортного средства с хост-компьютером сразу после начала процесса автоматического торможения также может быть использована вместо этого. Точность управления направлением движения транспортного средства с хост-компьютером по отношению к препятствию может быть снижена, поскольку скорость транспортного средства с хост-компьютером возрастает. В связи с этим, эффекты, аналогично варианту осуществления, могут быть достигнуты даже при использовании скорости транспортного средства с хост-компьютером сразу же после начала процесса автоматического торможения, как скорости Vb во время воздействия торможения, определяющей запрет на вмешательство автоматического рулевого управления.
[0088] Выше было описано устройство для обеспечения предотвращения столкновений в соответствии с этим вариантом осуществления. Настоящее изобретение не ограничивается вариантами осуществления и модифицированными примерами, описанными выше, и может быть изменено посредством использования различных форм, не отступая от целей настоящего изобретения.
Реферат
Изобретение относится к управляющим устройствам транспортных средств. Устройство для обеспечения предотвращения столкновений содержит блок обнаружения препятствия, блок автоматического торможения, блок автоматического рулевого управления, блок оценки и блок запрета применения автоматического рулевого управления. Блок оценки выполнен с возможностью фиксирования скорости во время воздействия торможения и определения того, превышает или нет зафиксированная скорость во время воздействия торможения пороговое значение скорости в условиях воздействия торможения, когда применяется автоматическое торможение. Достигается повышение безопасности управления транспортным средством. 2 н. и 2 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Система помощи рулению при парковке и способ ее эксплуатации
Патенты аналоги
Система помощи рулению при парковке и способ ее эксплуатации
Комментарии