Способ управления транспортным средством и система транспортного средства - RU2639960C2
Код документа: RU2639960C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к улучшению реагирования силовой цепи в транспортном средстве, что достигается за счет выхода из энергосберегающих режимов при обнаружении встречного транспортного потока. В одном примере переход в энергосберегающий режим запрещен при обнаружении встречного транспортного средства. Изобретение может быть использовано для улучшения реагирования при управлении автомобилем, увеличивая удовлетворенность водителя, а также экономию энергии.
Уровень техники
Производители автомобильной техники включают в поставляемые автомобили системы, предупреждающие водителя о присутствии встречного транспорта. Например, система оповещения о поперечном транспортном потоке (Cross-Traffic Alert) сигнализирует о транспортных средствах, приближающихся в направлении, перпендикулярном направлению движения транспортного средства. Такие системы обычно предназначены для предотвращения столкновений, в частности, с приближающимися транспортными средствами в слепых зонах водителя. Другим путем водителю транспортного средства может быть трудно сразу заметить приближающиеся автомобили, поскольку он может быть занят маневрированием, которое ограничивает внимание водителя в случае малой видимости или подвижности.
Изобретатели выявили потенциальные недостатки данных систем. В частности, существующие на настоящий момент системы предотвращения столкновений, сигнализирующие о приближающихся встречных транспортных средствах, могут быть предложены наряду с другими системами транспортного средства, предназначенными для экономии топлива, изменения показателей транспортного средства или обслуживания, или другими системами, которые снижают реакцию силовой цепи или готовность трансмиссии в целях экономии энергии. В частности, такие дополнительные системы могут направить работу транспортного средства и внимание водителя на выполнение других действий, отличных от тех, которые помогают оптимально реагировать на встречный поток автомобилей, как движущийся по параллельным автомобилю полосам (например, встречный параллельный поток), так и движущийся по полосам, перпендикулярным автомобилю (т.е. встречное поперечное движение). В силу этого может быть снижена реакция готовности транспортного средства и водителя на встречные автомобили, особенно чувствительность транспортного средства к командам водителя, маневренность транспортного средства и, в итоге, удовлетворенность водителя.
Раскрытие изобретения
В качестве одного из подходов для преодоления указанных недостатков может быть предложен способ, который позволяет запретить переход в энергосберегающий режим, или использование другой автомобильной системы в условиях, когда обнаружено встречное транспортное средство. Кроме того, способ может обеспечить селективное поддержание энергосберегающего режима при отсутствии встречного транспортного средства и выход из энергосберегающего режима при появлении встречного транспортного средства. Таким образом, это позволяет повысить чувствительность транспортного средства на команды водителя, маневренность транспортного средства и удовлетворенность водителя по сравнению с ситуацией, когда транспортное средство остается в энергосберегающем режиме.
Вышеуказанные преимущества, а также иные преимущества и конструктивные особенности настоящего описания будут очевидны из нижеследующего подробного описания, рассматриваемого отдельно или вместе с прилагаемыми чертежами.
Следует понимать, что вышеприведенное краткое изложение сущности изобретения представлено для описания в упрощенной форме ряда выбранных концепций, дальнейшее изложение которых приводится ниже в подробном описании. Краткое раскрытие сущности изобретения не направлено на определение основных или существенных характеристик заявленного предмета изобретения, объем которого однозначно определяется формулой изобретения. Кроме того, заявленный предмет изобретения не ограничивается вариантами реализации изобретения, устраняющими какой-либо из недостатков, указанных выше или в любой части данного раскрытия изобретения.
Краткое описание чертежей
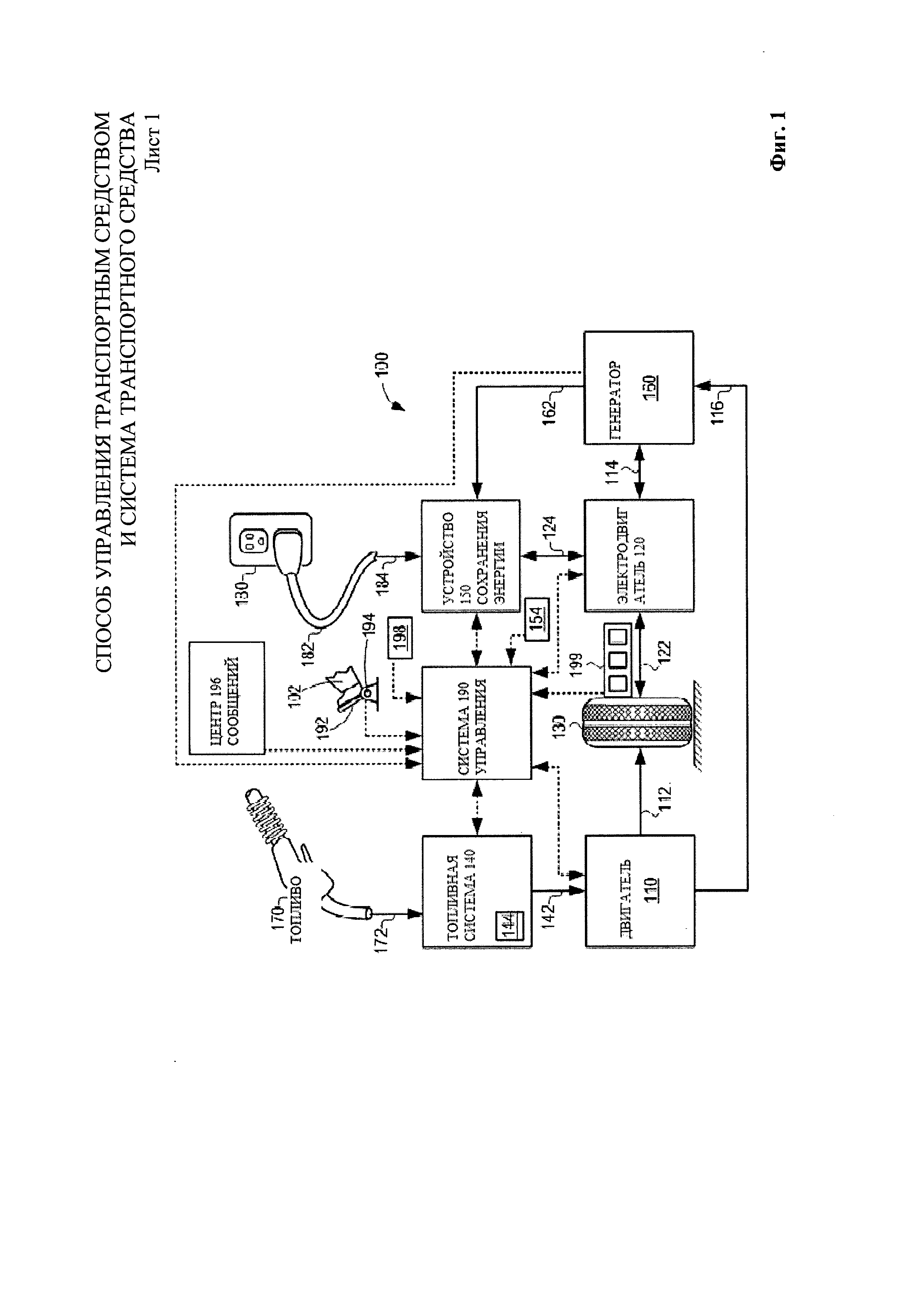
На Фиг.1 показана схема силовой цепи транспортного средства, включающей в себя двигатель, аккумулятор, топливную систему и электродвигатель.
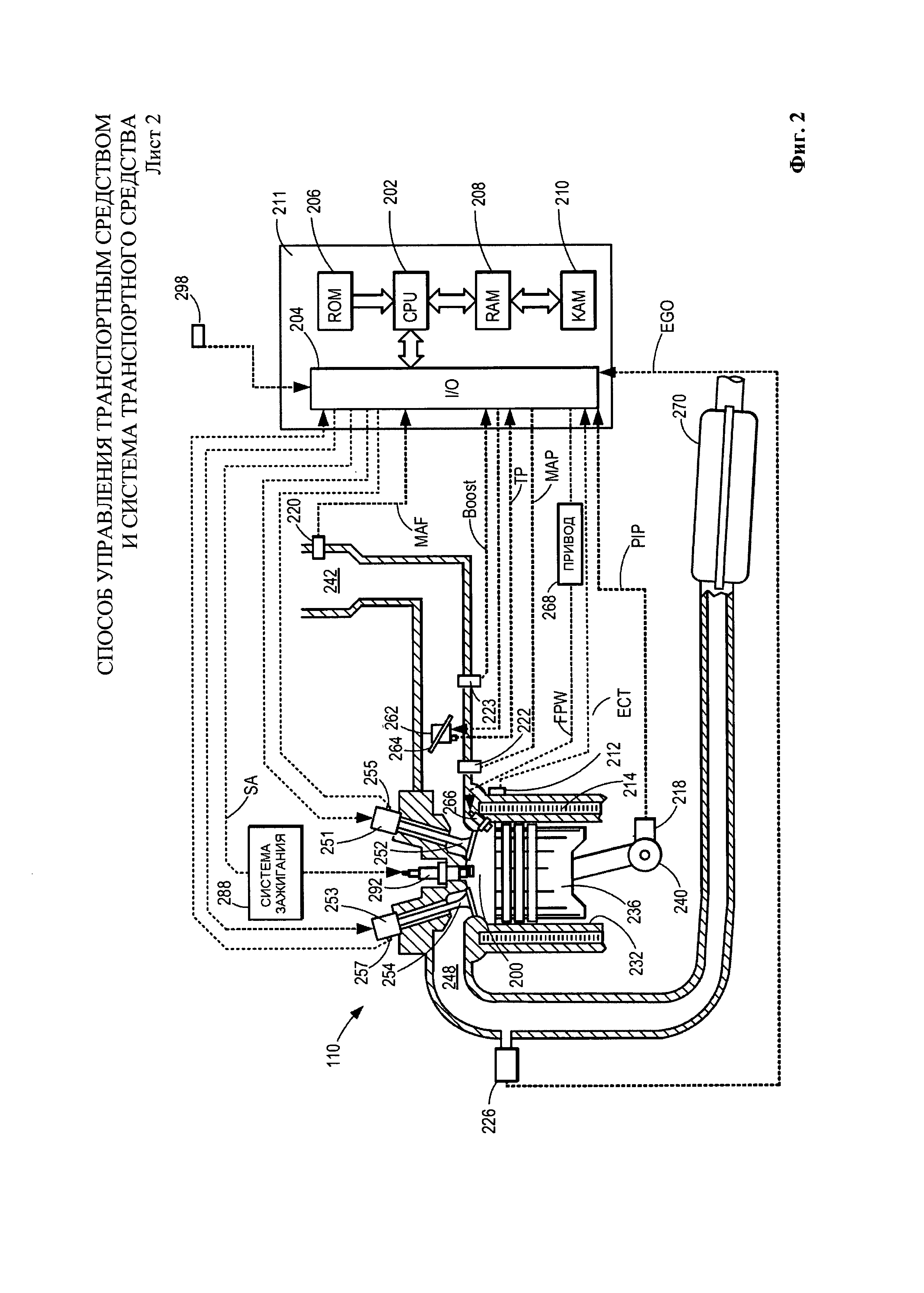
На Фиг.2 показана схема двигателя, включающая в себя подогреватель впускного воздуха, устройство нейтрализации отработавших газов и устройство рециркуляции выхлопных газов.
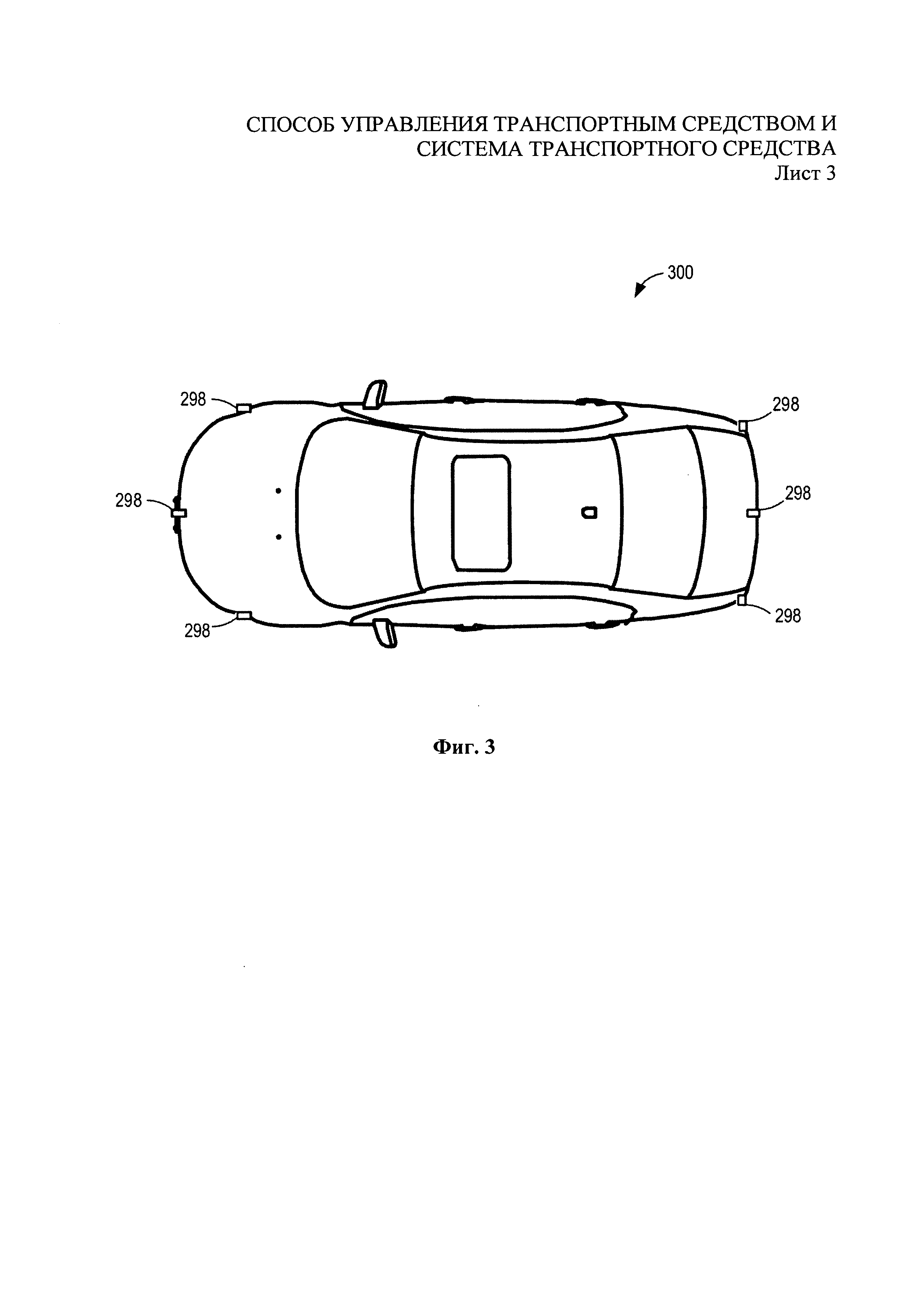
На Фиг.3 показан вид транспортного средства сверху, включая положения датчиков присутствия автомобилей.
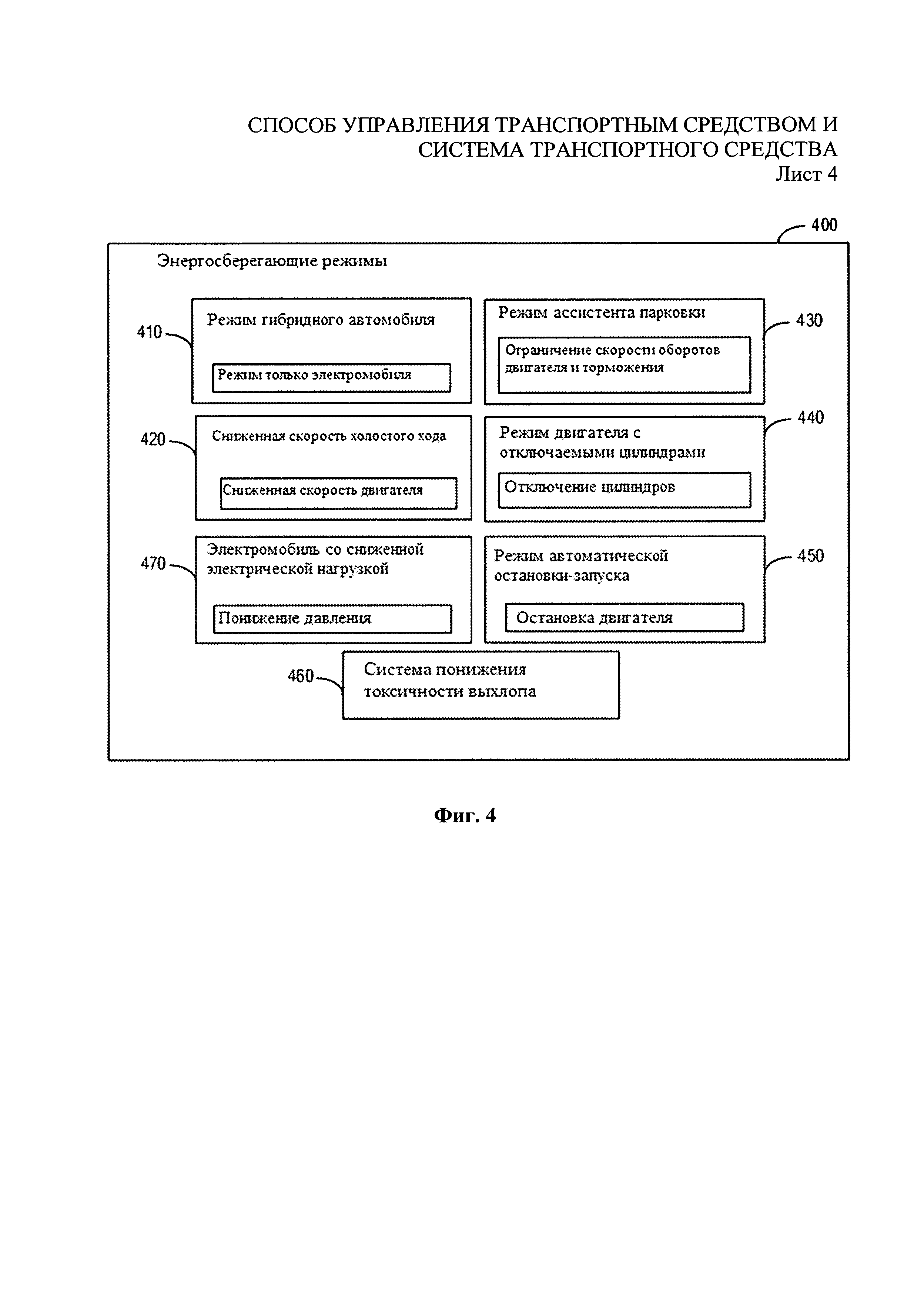
На Фиг.4 показаны обычные примеры энергосберегающих режимов в автомобиле.
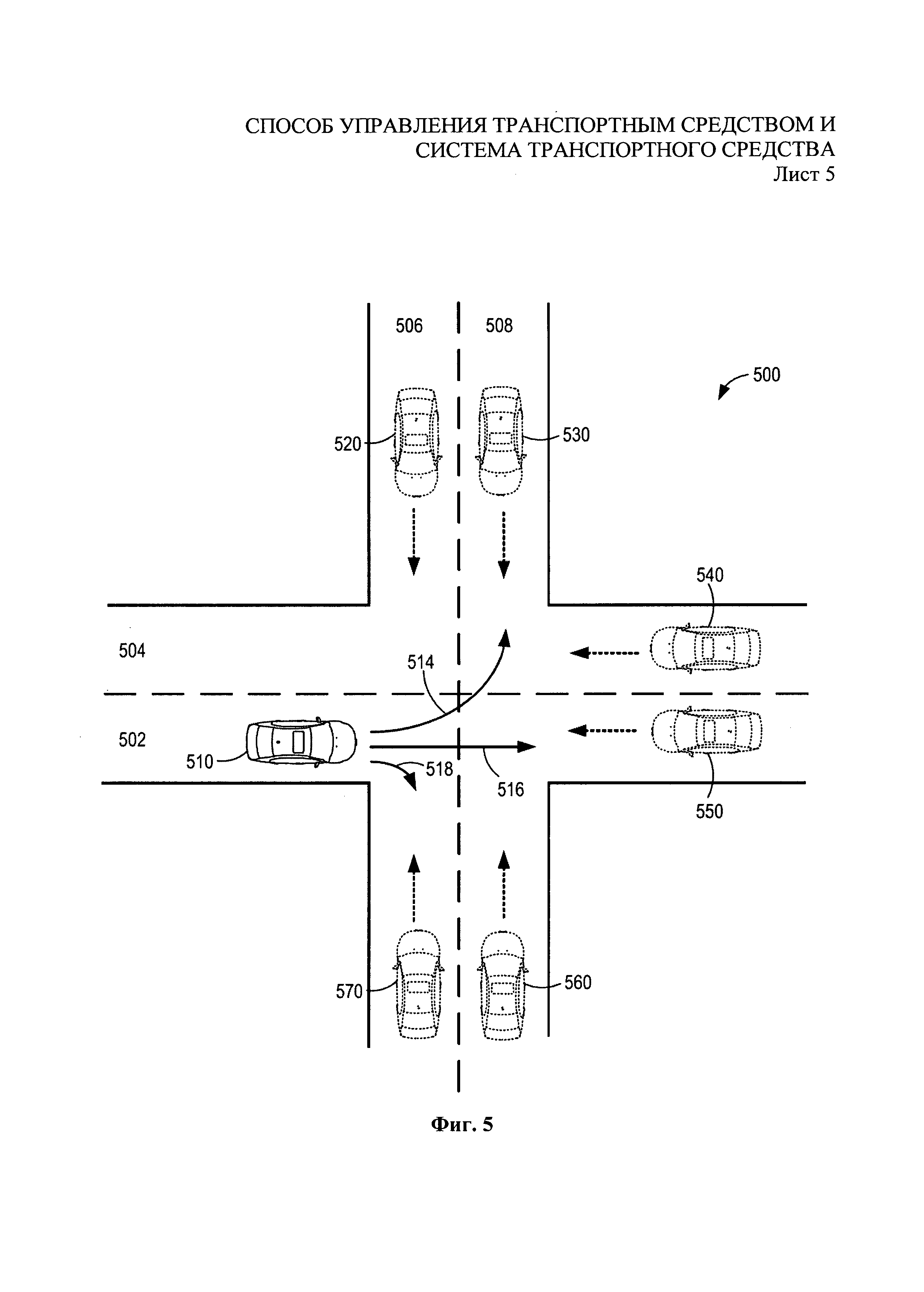
На Фиг.5 показаны примерные сценарии встречного движения на четырехстороннем перекрестке.
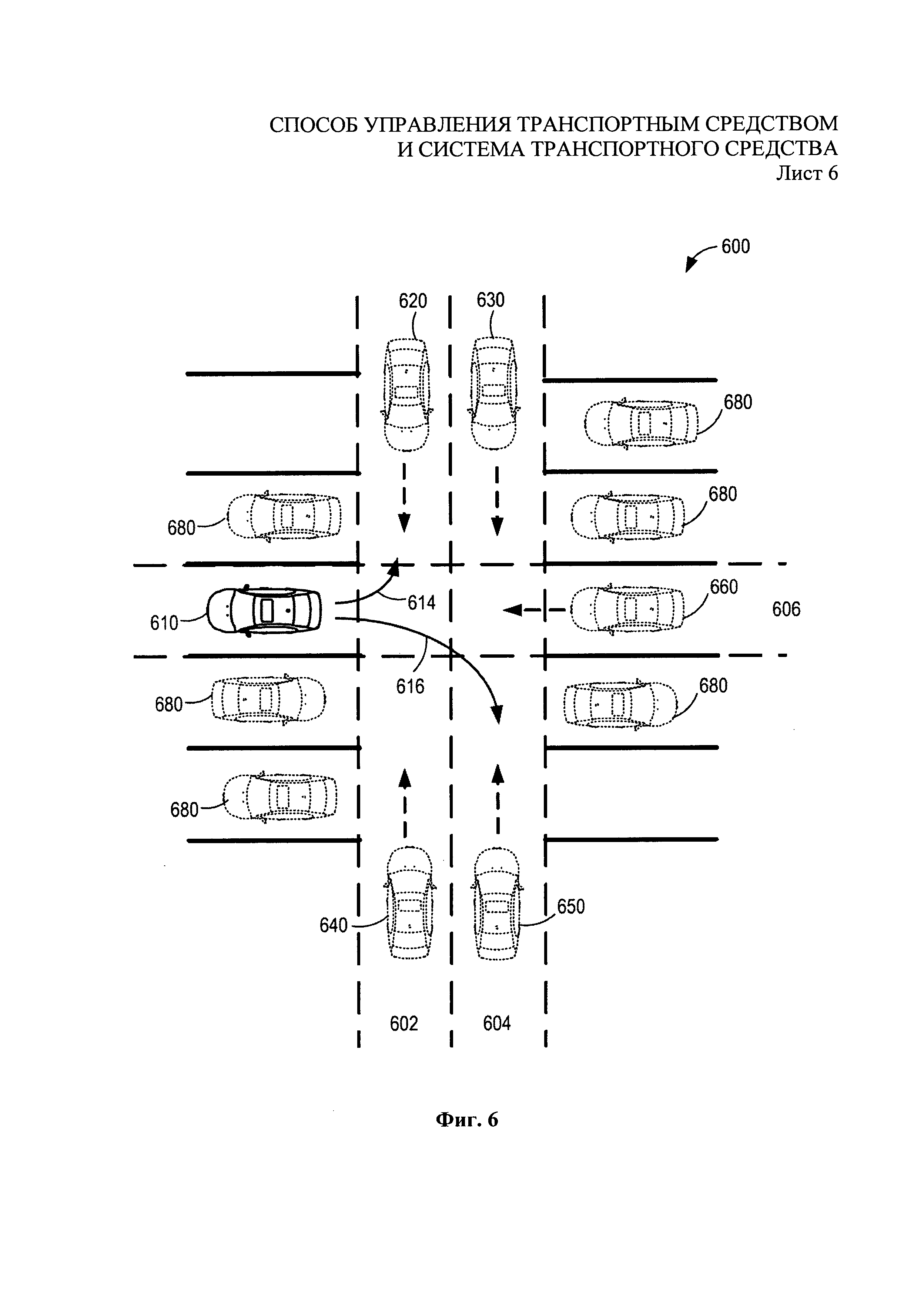
На Фиг.6 показаны примерные сценарии встречного движения для транспортного средства, выезжающего с парковочного места на стоянке.
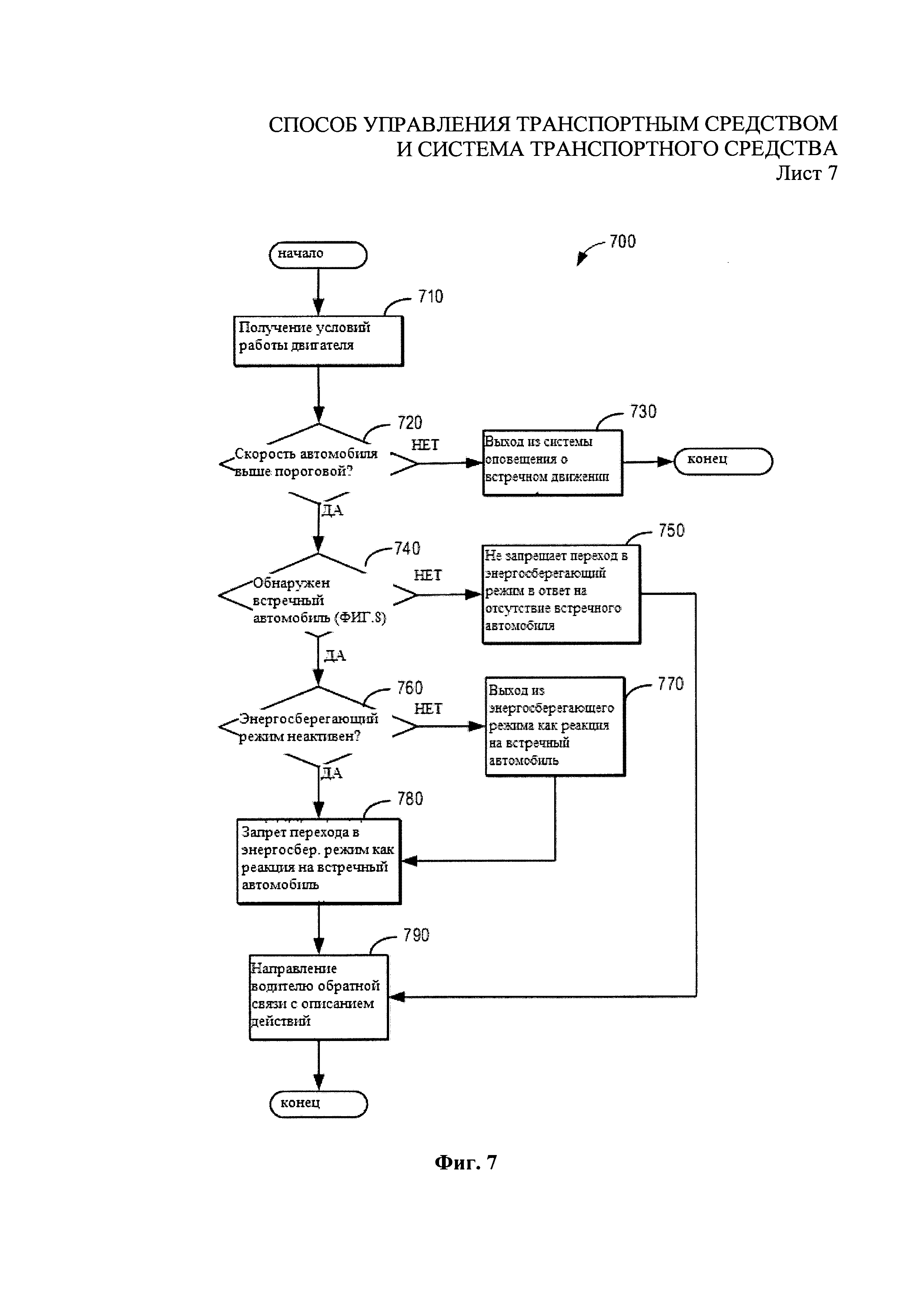
На Фиг.7 показана блок-схема, иллюстрирующая метод управления энергосберегающим режимом при обнаружении автомобилем встречного транспортного потока.
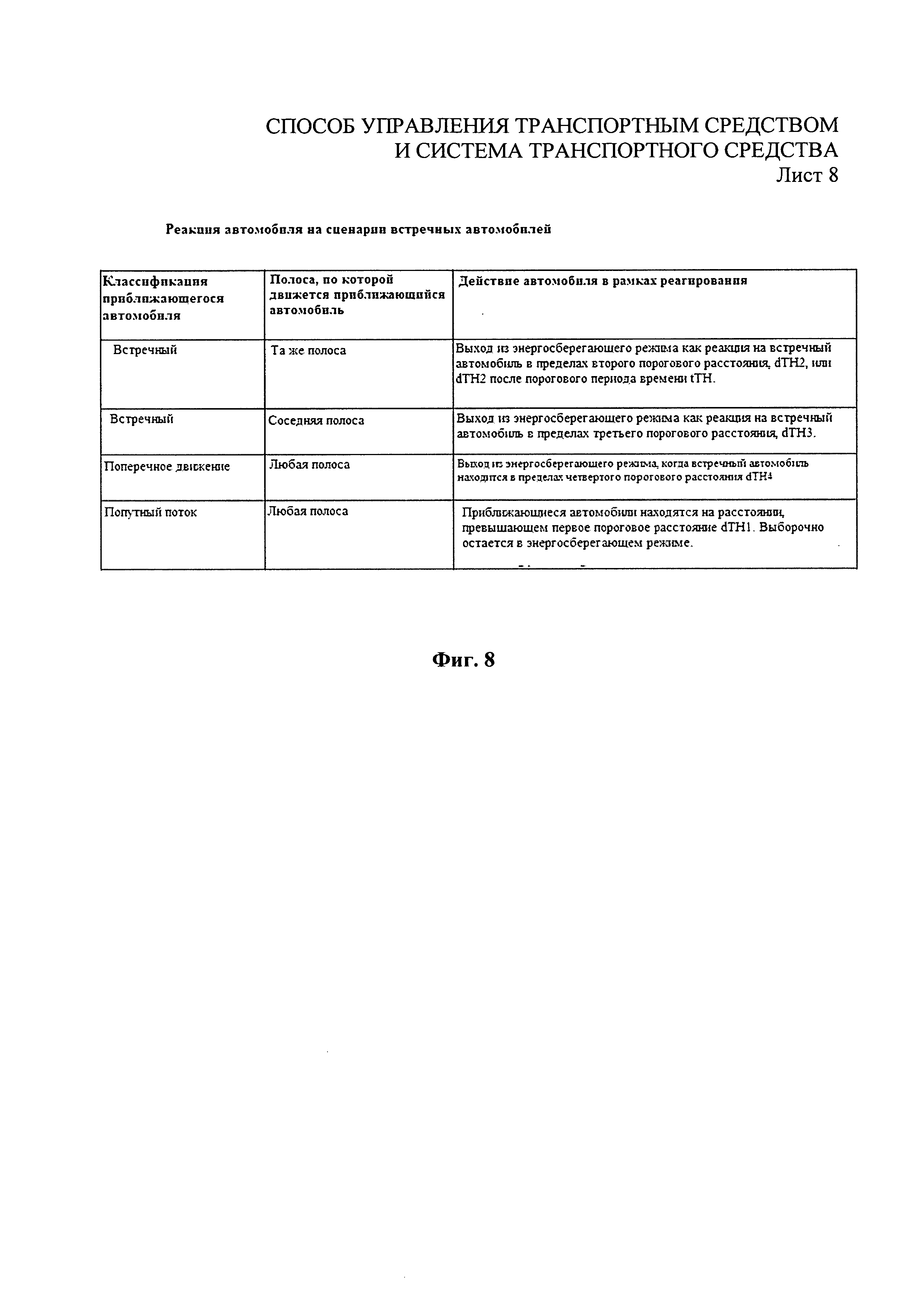
На Фиг.8 показана таблица примерных сценариев встречного транспортного потока и условий, при которых транспортное средство может, реагируя на условия наличия встречного транспортного потока, выходить из энергосберегающего режима или оставаться в нем.
Осуществление изобретения
Настоящее описание представляет собой способ и систему, которые обеспечивают быструю ответную реакцию силовой цепи в автомобиле при обнаружении встречного транспортного потока транспортным средством, работающим в энергосберегающем режиме. Встречный транспортный поток может включать в себя встречные автомобили, двигающиеся по траекториям, параллельным или перпендикулярным (например, поперечное движение) полосе, по которой движется транспортное средство. Кроме того, встречный транспортный поток может включать в себя встречные автомобили, двигающиеся по траекториям, отличным от параллельных или перпендикулярных полосе, по которой движется транспортное средство. За счет повышения реактивности силовой цепи в таких условиях можно обеспечить большую чувствительность транспортного средства для предотвращения столкновения с встречным транспортным потоком при сохранении энергии. На Фиг.1 показан пример двигательной установки транспортного средства, включающей в себя двигатель, электродвигатель, генератор, топливную систему и систему управления. На Фиг.2 показан пример двигателя внутреннего сгорания, хотя раскрытые системы и способ могут применяться к двигателям с воспламенением от сжатия и турбинами или к электромобилям с электрическим двигателем без двигателя внутреннего сгорания. На Фиг.3 показаны примеры датчиков присутствия автомобилей, расположенных по периметру транспортного средства, для обнаружения присутствия встречных автомобилей. На Фиг.4 показаны примеры стандартных энергосберегающих режимов, которые могут использоваться в автомобиле. На Фиг.5 и 6 показаны различные примерные сценарии встречного движения для транспортного средства, приближающегося к четырехстороннему перекрестку и выезжающего с парковочного места на стоянке. На Фиг.7 показана блок-схема, описывающая примерный способ выхода из энергосберегающих режимов транспортного средства или запрета этих режимов при обнаружении встречных автомобилей. На Фиг.8 показана таблица, в которой приведены различные условия, в которых могут быть обнаружены встречные автомобили.
Рассмотрим теперь Фиг.1, на которой показан пример двигательной системы 100 транспортного средства. Двигательная система 100 транспортного средства может включать в себя двигатель 110 внутреннего сгорания, и мотор 120 (электродвигатель). В качестве не ограничивающего примера, двигатель 110 представляет собой двигатель внутреннего сгорания, а электродвигатель 120 представляет собой электромотор. Таким образом, двигательной системой 100 транспортного средства может быть двигательная система для гибридного электромобиля. Тем не менее, двигательной системой транспортного средства также может быть двигательная система негибридного транспортного средства или электромобиля с электродвигателем и без двигателя внутреннего сгорания. Электродвигатель 120 может быть настроен на использование или работу от другого источника энергии, отличного от двигателя 110. Например, двигатель 110 может работать на жидком топливе (например, бензине) для выработки мощности двигателя, при этом электродвигатель 120 может потреблять электроэнергию для выработки мощности электродвигателя. Таким образом, транспортное средство с двигательной системой 100 может быть названо гибридным электромобилем (ГЭМ). В других примерах, в которых двигательная система 100 транспортного средства предназначена для электромобиля, двигательная система транспортного средства может быть названа электромобилем (ЭМ).
Двигательная система 100 транспортного средства может работать в разнообразных режимах работы в зависимости от условий движения, в которые попадает двигательная система транспортного средства. Некоторые из таких режимов позволяют сохранять двигатель в отключенном состоянии (например, переводить в отключенное состояние), когда сгорание топлива в двигателе прекращается. Например, в специальных условиях работы электродвигатель 120 может сообщать движение автомобилю через ведущее колесо 130, как показано стрелкой 122, когда двигатель 110 отключен.
В прочих условиях работы двигатель 110 может быть переведен в отключенное состояние, в то время как электродвигатель 120 может работать для осуществления зарядки устройства 150 накопления энергии, например, аккумулятора. Например, электродвигатель 120 может получать крутящий момент от ведущего колеса 130, как показано стрелкой 122, в этом случае электродвигатель может преобразовывать кинетическую энергию транспортного средства в электрическую энергию для устройства 150 накопления энергии, как показано стрелкой 124. Такая операция может быть названа рекуперативным торможением транспортного средства. Таким образом, в некоторых вариантах электродвигатель 120 может выполнять функцию генератора. Тем не менее, в других вариантах вместо этого генератор 160 может получать крутящий момент от ведущего колеса 130 - в этой ситуации генератор может преобразовывать кинетическую энергию транспортного средства в электрическую энергию для хранения в устройстве 150 накопления энергии, как показано стрелкой 162.
Все еще находясь в ином рабочем состоянии, двигатель 110 может работать за счет сжигания топлива, поступающего из топливной системы 140, как показано стрелкой 142. Например, двигатель 110 может работать таким образом, чтобы сообщать движение автомобилю через ведущее колесо 130, как показано стрелкой 112, при этом электродвигатель 120 отключен. При иных условиях работы как двигатель 110, так и электродвигатель 120 могут работать таким образом, чтобы сообщать движение автомобилю через ведущее колесо 130, как показано стрелками 112 и 122, соответственно. Конфигурация, в которой как двигатель, так и электродвигатель могут селективно сообщать движение автомобилю, может быть названа автомобильной двигательной системой параллельного типа. Обращаем внимание, что в некоторых вариантах электродвигатель 120 может сообщать движение автомобилю через первый набор ведущих колес, а двигатель 110 может сообщать движение автомобилю через второй набор ведущих колес.
В других вариантах воплощения двигательная система 100 транспортного средства может быть сконфигурирована как двигательная система последовательного типа, в которой двигатель не сообщает напрямую движение на приводные колеса. Точнее, двигатель 110 может работать таким образом, чтобы подавать питание на электродвигатель 120, который, в свою очередь, может сообщать движение автомобилю через приводное колесо 130, как указано стрелкой 122. Например, в специальных условиях работы двигатель 110 может запускать генератор 160, который в свою очередь подает электроэнергию на один или несколько следующих устройств: электродвигатель 120, как показано стрелкой 114, или устройство 150 накопления энергии, как показано стрелкой 162. В еще одном примере, двигатель 110 может работать, приводя в движение электродвигатель 120, который может, в свою очередь, выполнять функцию генератора для преобразования мощности двигателя в электроэнергию, при этом электроэнергия может накапливаться в устройстве 150 накопления энергии для последующего использования электродвигателем. Двигательная система транспортного средства может быть настроена на переход в два или более режима работы, описанных выше, в зависимости от условий работы транспортного средства. В еще одном примере двигательной системой транспортного средства может быть двигательная система электромобиля (например, без двигателя внутреннего сгорания), в которой электродвигатель, получающий электроэнергию из устройства 150 накопления энергии (например, аккумулятора), может сообщать движение автомобилю.
Топливная система 140 может включать в себя один или несколько топливных баков 144 для хранения топлива в автомобиле. Например, в топливном баке 144 может храниться одно или насколько видов жидкого топлива, включая, среди прочего, бензин, дизельное топливо и спиртовое топливо. В некоторых примерах топливо может храниться в автомобиле в форме смеси двух или нескольких различных видов топлива. Например, топливный бак 144 может быть выполнен с возможностью хранения смеси бензина и этанола (например, E10, E85 и т.д.) или смеси бензина и метанола (например, M10, M85 и т.д.), при этом такие виды топлива или топливные смеси могут подаваться в двигатель 110, как показано стрелкой 142. Кроме того, в двигатель 110 могут подаваться и другие подходящие виды топлива, где они могут сгорать в двигателе для выработки мощности двигателя. Мощность двигателя может использоваться для сообщения движения автомобилю, как указано стрелкой 112, или для подзарядки устройства 150 накопления энергии с помощью электродвигателя 120 или генератора 160.
В некоторых вариантах воплощения устройство 150 накопления энергии может быть предназначено для накопления электроэнергии, которую можно подавать другим потребителям в автомобиле (помимо электродвигателя), в том числе на обогрев салона и кондиционирование воздуха, запуск двигателя, работу фар, автомобильные аудио- и видеосистемы, подогреватель выхлопных газов, циркуляционный охладитель выхлопных газов и т.д. В качестве не ограничивающего примера, устройство 150 накопления энергии может включать в себя один или несколько аккумуляторов и/или конденсаторов.
Система 190 управления может направлять контрольные сигналы в одно или несколько следующих устройств: двигатель 110, электродвигатель 120, топливную систему 140, устройство 150 накопления энергии и генератор 160. Как показано на Фиг.2, система 190 управления может включать в себя контроллер 211 и может получать информацию от датчиков, установленных на одном или нескольких из следующих устройств: двигателя 110, электродвигателя 120, топливной системы 140, устройства 150 накопления энергии и генератора 160. Кроме того, система 190 управления может направлять управляющие сигналы на одно или несколько следующих устройств: двигатель 110, электродвигатель 120, топливную систему 140, устройство 150 накопления энергии и генератор 160, и такие получатели сигналов реагируют на данную сенсорную обратную связь. Система 190 управления может получать сигналы о запрашиваемой водителем мощности двигательной системы транспортного средства от водителя 102 транспортного средства. Например, система 190 управления может получать данные от датчика 194 положения педали, который взаимодействует с педалью 192. Педаль 192 может схематически обозначать педаль тормоза и/или педаль газа.
Устройство 150 накопления энергии может периодически получать электроэнергию от источника 180 питания, находящегося вне транспортного средства (т.е. не входящего в транспортное средство), как показано стрелкой 184. В качестве не ограничивающего примера, двигательная система 100 транспортного средства может быть сконфигурирована как гибридный электромобиль (ГЭМ) с подзарядкой от бытовой электросети, в котором электроэнергия может подаваться в устройство 150 накопления энергии от источника 180 энергии по кабелю 182 подачи электроэнергии. В качестве еще одного не ограничивающего примера, двигательная система 100 транспортного средства может быть сконфигурирована как электромобиль (ЭМ) с подзарядкой от бытовой электросети, в котором электроэнергия может подаваться в устройство 150 накопления энергии от источника 180 энергии по кабелю 182 подачи электроэнергии. Система 190 управления может дополнительно управлять подачей энергии или электричества из устройства 150 накопления энергии (например, аккумулятора) в зависимости от электрической нагрузки двигательной системы 100 транспортного средства. Например, при работе с низкой электрической нагрузкой система 190 управления может снизить напряжение, подаваемое от устройства 150 накопления энергии, при помощи инвертора/преобразователя, для экономии энергии.
При операции подзарядки устройства 150 накопления энергии от источника 180 питания кабель 182 электропередачи может быть использован для электрического соединения устройства 150 накопления энергии и источника 180 питания. Когда двигательная система транспортного средства работает для сообщения движения автомобилю, кабель 182 электропередачи может быть отсоединен от источника 180 питания и устройства 150 накопления энергии. Система 190 управления может определять количество электроэнергии, накопленной в устройстве накопления энергии, которое может быть указано как состояние заряда (уровень заряженности), и/или управлять таким количеством энергии.
В других примерах кабель 182 электропередачи может отсутствовать, в таком случае электроэнергия может поступать беспроводным способом в устройство 150 накопления энергии от источника 180 питания. Например, в устройство 150 накопления энергии может поступать электроэнергия из источника 180 питания посредством электромагнитной индукции, радиоволн и электромагнитного резонанса или сочетания этих способов. Таким образом, следует понимать, что можно использовать любой подходящий способ для подзарядки устройства 150 накопления энергии от источника энергии, который не входит в конструкцию транспортного средства. Таким образом, электродвигатель 120 может сообщать движение автомобилю за счет использования источника энергии, кроме топлива, используемого в двигателе 110.
В топливную систему 140 может периодически поступать топливо из источника топлива, внешнего для транспортного средства. В качестве не ограничивающего примера, двигательную систему 100 транспортного средства можно дозаправлять топливом из топливораздаточного устройства 170, как показано стрелкой 172. В некоторых вариантах воплощения топливный бак 144 может быть приспособлен для топлива, поданного из топливораздаточного устройства 170, до тех пор, пока оно не будет подано в двигатель 110 для сжигания.
Гибридный электромобиль с подзарядкой от бытовой электросети, описанный для двигательной системы 100 транспортного средства, может быть выполнен таким образом, чтобы можно было использовать вторичную форму энергии (например, электроэнергию), периодически поступающую от источника энергии, не входящего в конструкцию транспортного средства.
Двигательная система 100 транспортного средства также может включать в себя центр 196 сообщений, датчик 198 температуры/влажности окружающей среды, датчик 154 электрической нагрузки и датчик системы предотвращения опрокидывания, например, датчик (датчики) 199 бокового и/или продольного положения, и/или положения руля, или рыскания. Центр сообщений может включать в себя индикаторный световой сигнал и/или текстовый дисплей, на который выводятся сообщения для водителя, например, запрос водителю войти в систему для запуска двигателя, как будет рассмотрено ниже. Центр сообщений также может включать в себя различные элементы для ввода информации для получения вводных данных от водителя, такие как кнопки, сенсорные экраны, голосовой ввод/распознавание голосовых сообщений и т.д. В альтернативном варианте воплощения центр сообщений может передавать звуковые сообщения водителю без дисплея. Кроме того, датчик (датчики) 199 может (могут) включать в себя датчик вертикального ускорения для измерения неровности дороги. Эти устройства могут быть подключены к системе 190 управления. В одном примере система управления может осуществлять регулировку мощности двигателя и/или колесных тормозов для увеличения устойчивости транспортного средства в ответ на данные от датчика (датчиков) 199.
Рассмотрим теперь Фиг.2, на которой показан не ограничивающий пример цилиндра 200 двигателя 110, состоящего из компонентов впускной и выпускной систем, которые соединены с цилиндром. Следует отметить, что цилиндр 200 может представлять собой один из различных видов цилиндров двигателя. По крайней мере, частично цилиндр 200 задан стенками 232 камеры сгорания и поршнем 236. Поршень 236 может быть соединен с коленчатым валом 240 через шатун вместе с другими поршнями двигателя. Коленчатый вал 240 может быть функционально соединен с ведущим колесом 130, электродвигателем 120 или генератором 160 через трансмиссию.
Впускной воздух в цилиндр 200 может поступать через впускной канал 242. Впускной канал 242 может быть также соединен с другими цилиндрами двигателя 110. Впускной канал 242 может содержать дроссель 262 с дроссельной заслонкой 264, которую можно регулировать с помощью системы 190 управления для изменения потока всасываемого воздуха, который подается в цилиндры двигателя. Цилиндр 200 может сообщаться с впускным каналом 242 через один или несколько впускных клапанов 252. Цилиндр 200 может выводить продукты сгорания через выпускной канал 248. Цилиндр 200 может сообщаться с выхлопным каналом 248 через один или несколько выхлопных клапанов 254.
В некоторых вариантах воплощения цилиндр 200 может дополнительно включать в себя свечу 292 зажигания, которая может срабатывать от системы 288 зажигания. В цилиндре может быть предусмотрена топливная форсунка 266 для подачи топлива непосредственно в цилиндр. Однако в других вариантах воплощения топливная форсунка может быть расположена внутри впускного канала 242 выше по потоку от впускного клапана 252. Топливный инжектор 266 может срабатывать от привода 268.
На Фиг.2 схематически изображен не ограничивающий пример системы 190 управления. Система 190 управления может включать в себя процессинговую подсистему 202 обработки (CPU), которая может состоять из одного или нескольких процессорных блоков. CPU 202 может связываться с памятью, состоящей из одного или нескольких постоянных запоминающих устройств (ROM) 206, оперативного запоминающего устройства (RAM) 208 и энергонезависимой памяти (KAM) 210. В качестве не ограничивающего примера, в этой памяти могут храниться команды, выполняемые процессинговую подсистемой. Технологические процессы, функциональность и способы, описанные в настоящем документе, можно представить в виде команд, хранящихся в памяти системы управления, которые могут быть выполнены процессинговой подсистемой.
Центральный процессорный блок 202 может сообщаться с различными датчиками и исполнительными механизмами двигателя 110, устройства 150 накопления энергии и топливной системы 140 через устройство 204 ввода/вывода. В качестве не ограничивающего примера, такие датчики могут обеспечивать сенсорную обратную связь в форме информации о рабочем состоянии, направляемой в систему управления, и могут включать в себя: показания массового расхода воздуха (MAF), проходящего через впускной канал 242, от датчика 220; показания давления воздуха в коллекторе (MAP) от датчика 222; показания положения дроссельной заслонки (TP) от дросселя 262; показания температуры охлаждающей жидкости двигателя (ECT) от датчика 212, который может сообщаться с каналом 214 для охлаждающей жидкости; показания частоты вращения двигателя (PIP) от датчика 218; показания содержания кислорода в выхлопных газах (EGO) от датчика 226 состава выхлопных газов; показания положения впускного клапана от датчика 255; показания положения выхлопного клапана от датчика 257; показания электрической нагрузки от датчика 154 электрической нагрузки и показания о встречном транспортном потоке от одного или нескольких датчиков 298 присутствия автомобилей, в числе прочих. Например, датчики 298 присутствия автомобилей могут включать в себя радарные, лазерные, видео-, инфракрасные, ультразвуковые датчики и датчики изображения и/или их комбинации для обнаружения присутствия встречных автомобилей рядом с автомобилем. Кроме того, система оповещения о встречном движении (Oncoming Traffic Alert) в целях повышения чувствительности транспортного средства может включать в себя датчики 298 присутствия автомобилей. В частности, системы аналогичные системе оповещения о встречном движении могут использовать информацию от датчиков присутствия автомобилей для определения присутствия встречного транспортного потока (например, встречного параллельного и перпендикулярного или поперечного транспортного потока), а также для оповещения водителя (например, путем направления визуальных и/или звуковых сообщений в центр 196 сообщений) об опасных факторах встречного движения. Датчиком 154 электрической нагрузки может, например, быть трансформатор тока, который контролирует величину тока, который двигательная установка 100 транспортного средства получает от аккумулятора.
Кроме того, система 190 управления может управлять работой двигателя 110, включая цилиндр 200, с помощью одного или нескольких следующих исполнительных механизмов: привод 268 для регулировки момента и количества впрыска топлива, система 288 зажигания для регулировки момента зажигания и энергии искры, привод 251 впускного клапана для регулировки момента открытия впускного клапана, привод 253 выхлопного клапана для регулировки момента открытия выхлопного клапана и дроссель 262 для регулировки положения дроссельной заслонки 264. Можно отметить, что приводы 251 и 253 впускного и выхлопного клапанов могут представлять собой электромагнитные пускатели клапанов (ЭПК) и/или приводы на основе толкателей клапанов.
Рассмотрим теперь Фиг.3, на которой показан вид транспортного средства сверху, демонстрирующий примерные положения датчиков 298 присутствия автомобилей, расположенных по периметру транспортного средства. Например, транспортное средство 300 может быть оборудовано одним или несколькими датчиками, расположенными в области передней части транспортного средства, для обнаружения встречного транспортного потока, приближающегося к передней или боковой части транспортного средства. В качестве дополнительного примера, транспортное средство 300 может быть оборудовано одним или несколькими датчиками, расположенными в области задней части транспортного средства для обнаружения встречного транспортного потока, приближающегося к задней или боковой части транспортного средства. Таким образом, датчики 298 присутствия автомобилей могут обнаруживать встречный транспортный поток независимо от того, движется ли транспортное средство вперед или задним ходом. Кроме того, считается, что при этом встречный транспортный поток включает в себя как встречный поток, в котором встречные автомобили движутся по полосам, приблизительно параллельным полосе движения транспортного средства, а также встречный поперечный поток, в котором автомобили движутся по полосам, приблизительно перпендикулярным или непараллельным полосе движения транспортного средства. Встречный поперечный поток может также включать в себя транспортный поток, приближающийся к автомобилю 300 по направлениям, отличающимся от параллельного или перпендикулярного направления, в котором транспортное средство 300 направлен или движется. Примерные положения датчика присутствия автомобилей показаны на Фиг.3, и не являются ограничивающими. Таким образом, датчики присутствия автомобилей могут быть расположены или установлены в других местах внутри транспортного средства, на автомобиле или в любом месте транспортного средства.
Рассмотрим теперь Фиг.4, на которой показан набор примерных энергосберегающих режимов 400, в которых может работать транспортное средство. В некоторых примерах в энергосберегающем режиме может быть предусмотрен режим топливной эффективности (или экономии топлива). Например, при работе транспортного средства в одном или нескольких энергосберегающих режимах потребление топлива в общем или в среднем может быть меньше при выработке аналогичной выходной мощности и/или при выполнении определенного маневра по сравнению с работой транспортного средства в стандартном режиме работы (например, не в режиме энергосбережения). Включением и выключением энергосберегающих режимов при работе транспортного средства можно управлять с помощью системы 190 управления двигательной системой транспортного средства. Включение и выключение энергосберегающих режимов может зависеть от условий работы транспортного средства и информации от датчиков, поступающей в систему управления. Например, транспортное средство, работающее в режиме 410 гибридного питания, может переключаться на полностью электрический привод в условиях низкой нагрузки, интенсивного движения и/или движения с низкой скоростью с частыми остановками. Система 190 управления может включить режим 420 с уменьшенным количеством оборотов холостого хода для осуществления работы двигателя на пониженных оборотах для экономии топлива при частых или длительных периодах холостого хода, например, при длительном ожидании у светофоров, либо когда транспортное средство стоит. Кроме того, режим 450 автоматической остановки-запуска может останавливать двигатель во время длительных периодов холостого хода с целью экономии топлива. Более того, электромобиль, работающий при малой электрической нагрузке 470, для экономии энергии может уменьшать напряжение постоянного тока, подаваемое от устройства 150 накопления энергии, например, аккумулятора.
В процессе осуществления парковки может быть запущен режим 430 парковочного ассистента, чтобы эффективно провести транспортное средство на парковочное место в условиях ограничения скорости движения транспортного средства и торможения, что обеспечивает экономию топлива. Режим 440 двигателя с отключаемыми цилиндрами (VDE) предусматривает для уменьшения расхода топлива отключение одного или нескольких цилиндров 200 двигателя при работе транспортного средства с малыми нагрузками. Отключение цилиндров может быть выполнено посредством закрытия впускных и выхлопных клапанов одного или нескольких цилиндров и/или посредством прекращения подачи топлива в один или несколько цилиндров. Путем отключения одного или нескольких цилиндров двигатели с отключаемыми цилиндрами могут поддерживать высокое давление в оставшихся активных цилиндрах и, таким образом, поддерживать высокую эффективность расхода топлива для двигателя.
Система 460 снижения токсичности выхлопа также может ограничивать работу систем трансмиссии транспортного средства, например, во время периодов регенерации каталитического устройства для экономии топлива и/или снижения выбросов. Например, для предварительного нагревания катализаторов вместо вторичного впрыскивания топлива в ходе запусков из холодного состояния может быть использована электроэнергия. Кроме того, для осуществления регенерации катализаторов двигатель может работать на высоких оборотах или в периоды низкой нагрузки.
При работе в одном или нескольких описанных выше энергосберегающих режимах, в целях экономии энергии могут быть ограничены системы силовой цепи транспортного средства. Таким образом, может быть снижена чувствительность силовой цепи в автомобиле и/или готовность водителя избежать столкновения со встречным движением. Например, если гибридное транспортное средство работает в режиме только электромобиля, на уменьшенных оборотах двигателя, с выключенным двигателем или с отключенными цилиндрами, в автомобиле может возникнуть задержка реагирования на ускорение транспортного средства при выполнении маневра уклонения для того, чтобы избежать столкновения со встречным автомобилем. В еще одном примере, если электромобиль работает в режиме уменьшенной электрической нагрузки с пониженным напряжением на устройстве 150 накопления энергии, в автомобиле может возникнуть задержка реагирования на ускорение транспортного средства при выполнении маневра уклонения для избежания столкновения со встречным автомобилем. В качестве дополнительного примера, если скорость и торможение транспортного средства ограничены при работе в режиме ассистента парковки, реагирование транспортного средства на встречные автомобили может быть медленным по сравнению с ситуацией, когда режим ассистента парковки неактивен. Соответственно, когда транспортное средство работает в одном или нескольких энергосберегающих режимах, могут уменьшиться чувствительность транспортного средства к командам водителя, маневренность транспортного средства и, в итоге, удовлетворенность водителя.
Рассмотрим теперь Фиг.5, на которой показаны примерные сценарии встречного движения для транспортного средства 510 на четырехстороннем перекрестке 500. Например, могут присутствовать встречные автомобили 550 и 540, которые могут приближаться к автомобилю 510, находящемуся на перекрестке, двигаясь по той же полосе 502, по которой двигается транспортное средство 510, или по соседней полосе 504, соответственно. Кроме того, встречные автомобили могут представлять собой поперечный транспортный поток, в котором встречные автомобили двигаются по полосам, непараллельным полосе, по которой движется транспортное средство. Например, автомобили 520, 530, 560, и 570 могут приближаться к перекрестку с любой стороны от транспортного средства по полосам 506 или 508, перпендикулярным полосе 502, по которой движется транспортное средство 510. При достижении перекрестка транспортное средство 510 может проследовать, например, вперед через перекресток, как показано стрелкой 516, сделать поворот направо, как показано стрелкой 518, или сделать поворот налево, как показано стрелкой 514.
Как упоминалось выше, транспортное средство 510 может быть оснащено одним или несколькими датчиками 298 присутствия автомобилей, расположенными по периметру транспортного средства, для обнаружения присутствия встречных автомобилей. Датчики 298 присутствия автомобилей могут быть особенно полезны для обнаружения встречных автомобилей, которые не видны водителю транспортного средства, в том числе автомобилей, двигающихся в слепых зонах водителя. Датчики 298 присутствия автомобилей могут включать в себя радарные, лазерные, видео-, инфракрасные, ультразвуковые датчики и датчики изображения и/или их комбинации для обнаружения присутствия встречных автомобилей рядом с автомобилем. Таким образом, датчики 298 присутствия автомобилей, возможно, могут определять расстояние до встречных автомобилей, количество встречных автомобилей, направление движения встречных автомобилей и пр. Кроме того, датчики 298 присутствия автомобилей могут получать информацию о встречных транспортного средствах и направлять эту информацию в систему 190 управления через заданные промежутки времени. Соответственно, используя информацию от датчиков 298 присутствия автомобилей вместе с информацией, полученной от других датчиков транспортного средства, система 190 управления может определять скорость и траекторию приближения встречных автомобилей. Система 190 управления затем может определить, достигнут ли встречные автомобили определенного заданного порогового расстояния до транспортного средства в течение заданного порогового периода времени, tTH; и т.д. Например, транспортное средство 550 может приближаться к автомобилю 510 по той же самой полосе. Тем не менее, если транспортное средство 550 находится очень далеко (например, на расстоянии, превышающем первое пороговое расстояние) и/или движется очень медленно, то, возможно, транспортное средство 550 не будет определено как встречное транспортное средство, представляющее опасность, и транспортное средство может выборочно остаться в энергосберегающем режиме. С другой стороны, если транспортное средство 550 движется в пределах первого порогового расстояния до транспортного средства 510, транспортное средство 510 может, реагируя на это, прекратить использование энергосберегающего режима.
Относительные траектории и полосы движения транспортного средства 510 и встречных автомобилей также могут влиять на реакцию транспортного средства 510 на встречный транспортный поток. Например, с помощью информации от датчика присутствия автомобилей система управления может определить, что встречные автомобили 540 и 560, несмотря на то, что они приближаются на высокой скорости, не представляют опасности для транспортного средства 510, так как оно поворачивает направо на перекрестке 500 и следует по маршруту 518 (например, что может быть определено на основании положения рулевого колеса и датчиков 199 скорости рыскания, информации о маршруте от спутниковой системы навигации GPS и т.д.). В таком сценарии расстояния до встречных автомобилей 540 и 560 могут быть больше, чем определенное пороговое расстояние, и система 190 управления может выборочно продолжать вести транспортное средство 510 в одном или нескольких энергосберегающих режимах. С другой стороны, если датчики 298 присутствия автомобилей обнаруживают присутствие встречного транспортного средства 506, который движется по той же самой полосе 506, по которой транспортное средство делает правый поворот на перекрестке 500, встречное транспортное средство 506 может двигаться в пределах определенного порогового расстояния от транспортного средства 510, и система 190 управления может осуществить выход из одного или нескольких энергосберегающих режимов 400 так, чтобы транспортное средство 510 мог быстро реагировать с тем, чтобы избежать столкновения с встречным потоком.
Однако если определено, что расстояние от транспортного средства 510 до встречного транспортного средства 506 больше первого порогового расстояния, встречное транспортное средство 506 может быть попутным и может не представлять собой угрожающего фактора опасности. В этом случае система 190 управления может выборочно оставить транспортное средство в энергосберегающем режиме, тем самым предотвращая чрезмерные прерывания и перезапуски энергосберегающего режима. Напротив, в случае, когда датчики 298 присутствия автомобилей обнаруживают встречное транспортное средство 550 на той же самой полосе 502, по которой движется транспортное средство 510, в пределах определенного порогового расстояния, выход из одного или нескольких энергосберегающих режимов 400 может потенциально повысить реагирование транспортного средства 510 для предупреждения столкновения со встречным автомобилем по сравнению с ситуацией, когда транспортное средство 510 продолжает работать в одном или нескольких энергосберегающих режимах. Таким образом, транспортное средство может реагировать по-разному на встречные автомобили, движущиеся по той же полосе, по которой движется сам транспортное средство, и на встречные автомобили, движущиеся по соседней полосе. Кроме того, расчетный маршрут (например, левый поворот 514, движение прямо вперед 516, правый поворот 518) транспортного средства также может повлиять на определение того, приближаются ли встречные автомобили по той же или по соседней полосе движения. Более того, расстояние, скорость и время до достижения встречным автомобилем порогового расстояния до транспортного средства 510 могут влиять на действия, выполняемые системой 190 управления для выборочного продолжения работы транспортного средства 510 в энергосберегающем режиме или для выхода из энергосберегающего режима, в рамках реагирования на обнаружение присутствия встречных автомобилей.
В качестве еще одного примера, транспортное средство 510 может ехать прямо через перекресток 500. Датчики 298 присутствия автомобилей могут обнаружить встречное транспортное средство 540. Информация от датчиков 298 присутствия автомобилей может указывать, что встречное транспортное средство 540 приближается по соседней полосе. В силу этого система 190 управления может выборочно продолжить работу транспортного средства в энергосберегающем режиме. Тем не менее, в другом примере, если расстояние от транспортного средства 510 до встречного транспортного средства 540 находится в пределах определенного порогового расстояния, транспортное средство может выйти из энергосберегающего режима так, чтобы транспортное средство 510 мог реагировать, например, в случае поворота встречного транспортного средства 540 налево на перекрестке.
Датчики 298 присутствия автомобилей также могут обнаруживать присутствие встречных автомобилей в поперечном транспортном потоке (например, автомобилей 520, 530, 560 и 570) в пределах порогового расстояния. В этом случае транспортное средство может выйти из энергосберегающего режима независимо от состояния полос 506 и 508, по которым приближаются встречные автомобили, или маршрута транспортного средства 510 (например, 514, 516 или 518), реагируя на встречный транспортный поток, тем самым потенциально улучшая реагирование транспортного средства 510 в целях предотвращения столкновения с встречным транспортным потоком. В ином случае транспортное средство 510 может выборочно продолжать работать в энергосберегающем режиме, если встречные автомобили 520, 530, 560 или 570 обнаружены за пределами порогового расстояния до транспортного средства 510.
Теперь рассмотрим Фиг.6, на которой показаны примерные сценарии встречного транспортного потока для транспортного средства 610, выезжающего с парковочного места на стоянке 600. Транспортное средство 610 может двигаться задним ходом с парковочного места или может двигаться передним ходом, и может быть оснащено датчиками 298 обнаружения автомобилей для обнаружения встречного транспортного потока. Встречный транспортный поток может включать в себя приближающийся движущийся в поперечном направлении транспортный поток, например, в виде автомобилей 620, 630, 640 и 650 на полосах 602 и 604, и параллельный встречный поток, например, в виде транспортного средства 660, выезжающего с парковочного места прямо напротив парковочного места транспортного средства 610 на полосе 606. Встречный транспортный поток может состоять из автомобилей, приближающихся с других направлений, дополнительно к показанным на Фиг.6, например, на стоянках, где парковочные места расположены по диагонали, или при параллельной парковке. Датчиками 298 присутствия автомобилей могут быть обнаружены другие припаркованные автомобили 680. Однако датчики 298 присутствия автомобилей могут определить, что припаркованные автомобили 680 не двигаются и, следовательно, не могут оказывать какого-либо влияния на работу транспортного средства 610.
Если датчиками 298 присутствия автомобилей обнаружены встречные автомобили 620, 630, 640 или 650 в пределах определенного порогового расстояния, транспортное средство может выйти из энергосберегающего режима (например, режима ассистента парковки), так что водитель транспортного средства может быстро реагировать на встречные автомобили. Кроме того, выход из энергосберегающего режима транспортного средства может быть осуществлен, если датчики присутствия автомобилей обнаруживают приближение транспортного средства 660 в пределах порогового расстояния. Использование датчиков 298 присутствия автомобилей и реагирование в форме выхода из энергосберегающего режима или продолжения работы в энергосберегающем режиме может быть полезным, когда встречные машины не видны или находятся в слепой зоне водителя транспортного средства. Таким образом, водитель транспортного средства, выезжающий с парковочного места, может быть оповещен и может быстро реагировать на встречный транспортный поток, даже если водитель изначально не видит встречный транспортный поток.
В качестве еще одного примерного сценария, энергосберегающий режим, например режим парковочного ассистента, может быть активным во время выполнения парковки транспортного средства. Встречные автомобили могут представлять опасность и могут быть обнаружены во время выполнения парковки транспортного средства. Например, другой транспортное средство может не увидеть транспортное средство водителя и может попытаться одновременно припарковаться на том же парковочном месте. Кроме того, с паркующимся автомобилем могут столкнуться встречные машины. В этих условиях, если датчики присутствия автомобилей обнаруживают встречное транспортное средство в ходе парковки, будет осуществлен выход из энергосберегающего режима ассистента парковки, что позволяет водителю быстро реагировать с тем, чтобы избежать столкновения со встречным автомобилем.
На Фиг.5 и 6, таким образом, показаны некоторые примерные сценарии вариантов встречного транспортного потока для транспортного средства 510, приближающегося к четырехстороннему перекрестку и выезжающего с парковочного места на парковке транспортного средства. Сценарии и варианты реагирования на встречный транспортный поток по отношению к автомобилю 510, описанные выше, не являются исчерпывающими сценариями. Существуют иные сценарии реагирования на встречный транспортный поток на четырехсторонних перекрестках и парковках. Вышеуказанные сценарии служат только для пояснения примеров того, как можно получить преимущества по сравнению с традиционными технологиями посредством использования настоящего изобретения. Кроме того, способы и системы, описанные в настоящем документе, можно также применять к другим сценариям встречного транспортного потока, касающимся транспортного средства 510, таким как трехсторонний перекресток, двухстороннее или многостороннее движение или одностороннее движение, и т.п.
Таким образом, для реализации предложенного способа система транспортного средства может содержать двигатель, один или несколько датчиков присутствия автомобилей для обнаружения присутствия встречного транспортного средства, и блок управления двигателем, в который поступает входной сигнал от одного или нескольких датчиков присутствия автомобилей. В блоке управления двигателем могут содержаться постоянные команды, выполняемые для управления автомобилем в энергосберегающем режиме, постоянные команды, содержащие избирательное сохранение энергосберегающего режима в ответ на указание об отсутствии встречного транспортного средства для обеспечения экономии топлива, и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима при обнаружении встречного транспортного средства для обеспечения реагирования транспортного средства на встречный транспортный поток. Транспортное средство также может двигаться со скоростью, превышающей пороговую скорость. Выборочное сохранение энергосберегающего режима может осуществляться как реагирование на указание об отсутствии встречного транспортного средства, движущегося по той же полосе, по которой движется само транспортное средство, и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима может осуществляться как реагирование на указание о присутствии встречного транспортного средства, движущегося по той же полосе, по которой движется само транспортное средство. Выборочное сохранение энергосберегающего режима может дополнительно осуществляться как реагирование на указание об отсутствии встречного транспортного средства, движущегося по полосе, соседней с полосой, по которой движется транспортное средство, и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима может дополнительно осуществляться как реагирование на указание о присутствии встречного транспортного средства, движущегося по полосе, соседней с полосой, по которой движется само транспортное средство.
Рассмотрим теперь Фиг.7, на которой показан пример способа 700 улучшения реагирования силовой цепи в автомобиле путем избирательного сохранения энергосберегающего режима или выхода из энергосберегающих режимов при отсутствии или присутствии встречного транспортного потока. Способ 700 начинается с этапа 710, на котором определяют рабочие условия транспортного средства, такие как число оборотов двигателя, крутящий момент, режим работы, энергосберегающий режим и т.п. Кроме того, могут быть получены данные от датчиков, например, данные датчика 298 присутствия автомобилей, наряду с другой информацией об автомобиле, такой как данные датчика 199 скорости рыскания, данные глобальной спутниковой системы навигации, положение 192 педали, положение рулевого колеса и т.п. Далее способ 700 переходит к этапу 720, на котором определяют, движется ли транспортное средство со скоростью, превышающей пороговое значение скорости. Если транспортное средство не движется или движется медленнее порогового значения скорости, то система оповещения о встречном транспортном потоке отключается на этапе 730, и способ 700 заканчивается. Выход из системы оповещения о встречном транспортном потоке может включать в себя отключение или временную приостановку сигналов, поступающих от датчиков 298 присутствия автомобилей. Пороговым значением скорости может быть заданное или заранее установленное значение скорости. Если транспортное средство не движется или движется медленнее порогового значения скорости, вероятность встречного движения может быть очень мала по сравнению с ситуацией, когда транспортное средство движется со скоростью, превышающей пороговое значение скорости. В этих условиях энергосберегающие режимы транспортного средства могут быть прерваны системой оповещения о встречном транспортном потоке в целях экономии топлива. В некоторых примерах пороговое значение скорости может быть установлено равным нулю, например, когда транспортное средство остановлено или запарковано.
Если транспортное средство движется быстрее порогового значения скорости, способа 700 переходит к этапу 740, на котором определяют присутствие встречных автомобилей. Присутствие встречных автомобилей может быть определено на основании информации, переданной от датчиков 298 присутствия автомобилей. На Фиг.8 показаны несколько примерных сценариев, в которых могут быть обнаружены встречные автомобили. Например, может быть не обнаружено встречных автомобилей в случае, когда во встречном транспортном потоке может находиться один или несколько встречных автомобилей, приближающихся к автомобилю, но на расстоянии, превышающем первое пороговое расстояние, dTH1. Когда обнаружены встречные автомобили, но на расстоянии от транспортного средства, превышающем dTH1 они могут рассматриваться как попутный транспортный поток, и могут не представлять опасности для транспортного средства. В таких условиях транспортное средство может выборочно продолжить работу в одном или нескольких энергосберегающих режимах.
Продолжая рассматривать Фиг.8, во встречном транспортном потоке может, кроме того, находиться один или несколько встречных автомобилей, приближающихся к автомобилю по той же самой полосе. Таким образом, в ответ на обнаружение встречного транспортного средства на той же самой полосе транспортное средство может выйти из энергосберегающего режима, когда встречное транспортное средство находится в пределах второго порогового расстояния, dTH2. Второе пороговое расстояние, dTH2, может быть меньше первого порогового расстояния, dTH1. В качестве дополнительного примера, транспортное средство может выйти из энергосберегающего режима в случае, когда встречное транспортное средство на той же самой полосе будет находиться в пределах dTH2 от транспортного средства через пороговый период времени, tTH. Пороговый период времени, tTH, может быть определен с помощью датчиков 298 присутствия автомобилей на основании траектории и скорости встречного транспортного средства, как описано выше. Таким образом, транспортное средство может быстро реагировать на встречные автомобили, которые находятся на расстоянии от транспортного средства, превышающем второе пороговое расстояние, dTH2, но движутся с высокой скоростью, так что они будут находиться в пределах dTH2 в течение порогового периода времени tTH.
В еще одном примере во встречном транспортном потоке может находиться встречное транспортное средство на соседней полосе движения. В этом случае транспортное средство может, реагируя на обстановку, выходить из энергосберегающего режима в ситуации, когда встречное транспортное средство на соседней полосе находится от транспортного средства в пределах третьего порогового расстояния, dTH3 которое может быть меньше второго порогового расстояния. Так как транспортное средство движется по соседней полосе, транспортное средство может оставаться в энергосберегающем режиме до тех пор, пока встречное транспортное средство не окажется в пределах меньшего по величине порогового расстояния, dTH3, от транспортного средства по сравнению со случаем, когда встречное транспортное средство движется по той же самой полосе, по которой движется транспортное средство, для экономии топлива.
В качестве дополнительного примера, встречный транспортный поток может включать в себя поперечный транспортный поток, приближающийся к автомобилю с любой полосы. Как описано выше, поперечный транспортный поток может приближаться к автомобилю с полос, расположенных в направлении, перпендикулярном полосе движения транспортного средства, или с полос, расположенных в направлениях, отличных от параллельных или перпендикулярных полосе движения транспортного средства. Если встречный поперечный транспортный поток находится в пределах четвертого порогового расстояния, dTH4, то транспортное средство может, реагируя на эту ситуацию, выйти из энергосберегающего режима. Четвертое пороговое расстояние, dTH4, может быть больше, чем dTH3, но меньше, чем dTH2. Таким образом, транспортное средство может быстро реагировать на встречный поперечный транспортный поток, чей сопутствующий риск или опасности относительно транспортного средства могут быть больше, чем у встречного параллельного транспортного потока на соседних полосах, но меньше, чем сопутствующий риск или опасности, связанные с встречным параллельным транспортным потоком, приближающимся по той же полосе, по которой движется транспортное средство. При определенных условиях реакция транспортного средства на поперечный транспортный поток на основании траектории движения транспортного средства может быть изменена. Например, как описано выше, если транспортное средство поворачивает направо на перекрестке, наличие поперечного транспортного потока на полосах, соседних полосе, на которую поворачивает транспортное средство, может не привести к выходу транспортного средства из энергосберегающего режима.
Таким образом, примерные сценарии на Фиг.8 показывают, как можно сбалансировать экономию топлива и работу в энергосберегающих режимах с реагированием транспортного средства на различные типы встречного транспортного потока с тем, чтобы поддерживать маневренность транспортного средства и удовлетворенность водителя. Примерные сценарии на Фиг.8 не являются исчерпывающими сценариями, и существует много других сценариев. Например, могут существовать условия, при которых можно рассматривать траекторию транспортного средства относительно встречного транспортного потока, как описано выше. Кроме того, на реагирование транспортного средства могут также влиять другие условия, включая скорость и количество встречного транспортного потока. Например, если встречный транспортный поток включает в себя как встречный параллельный, так и встречный поперечный поток, то в ответ на повышенный риск по сравнению с ситуацией, когда присутствует только одно встречное транспортное средство, транспортное средство может выйти из энергосберегающего режима более консервативным образом (например, досрочным выходом из энергосберегающего режима или когда встречные автомобили находятся на более значительном расстоянии).
Возвращаясь к Фиг.7, на этапе 740, если не обнаружено присутствие встречного транспортного средства, например, при помощи использования сценариев, показанных на Фиг.8, то способ 700 переходит к этапу 750, где транспортное средство выборочно остается в энергосберегающем режиме или не запрещает переход в энергосберегающий режим в рамках реагирования на отсутствие встречных автомобилей. После выполнения этапа 750 способ 700 переходит к этапу 790.
Если встречное транспортное средство обнаружен на этапе 740, то способ 700 переходит к этапу 760, на котором определяется, отключен ли энергосберегающий режим. Если энергосберегающий режим включен, то способ 700 переходит к этапу 770, на котором осуществляется выход из энергосберегающего режима или энергосберегающий режим останавливается в рамках реагирования на встречное транспортное средство. Затем способ 700 переходит к этапу 780. Если энергосберегающий режим выключен, способ 700 блокирует переход в энергосберегающий режим в рамках реагирования на присутствие встречного транспортного средства на этапе 780.
Способ 700 переходит к этапу 790, на котором водителю направляется сигнал обратной связи с описанием действий, выполненных в рамках способа в рамках реагирования на присутствие или отсутствие встречных автомобилей. Сигнал обратной связи может быть направлен водителю в центр 196 сообщений в различных формах, например, с помощью звуковых сигналов и/или визуальных световых индикаторов. После этапа 790 способ 700 завершается.
Таким образом, способ управления автомобилем может предусматривать управление автомобилем в энергосберегающем режиме, избирательное сохранение энергосберегающего режима для экономии энергии при наличии указания об отсутствии встречного транспортного средства и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима при наличии указания о присутствии встречного транспортного средства для обеспечения реагирования транспортного средства на встречный транспортный поток. Кроме того, транспортное средство может двигаться со скоростью, превышающей пороговую скорость. Более того, избирательное сохранение энергосберегающего режима может выполняться как реагирование на указание об отсутствии встречного транспортного средства, причем в данной ситуации встречным автомобилем может являться встречное транспортное средство, движущееся по той же полосе, по которой движется сам транспортное средство. При этом запрет перехода в энергосберегающий режим или выход из энергосберегающего режима выполняется как реагирование на указание о присутствии встречного транспортного средства, движущегося по той же полосе, по которой движется сам транспортное средство. Кроме того, выборочное сохранение энергосберегающего режима может дополнительно выполняться как реагирование на указание об отсутствии встречного транспортного средства, причем в данной ситуации встречным автомобилем может являться встречное транспортное средство, движущееся по полосе, соседней с полосой, по которой движется транспортное средство, и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима может дополнительно осуществляться как реагирование на указание о присутствии встречного транспортного средства, движущегося по полосе, соседней с полосой, по которой движется транспортное средство.
Способ может дополнительно предусматривать направление сообщения для уведомления водителя транспортного средства о выборочном сохранении энергосберегающего режима или о запрете перехода в энергосберегающий режим или выходе из энергосберегающего режима.
Энергосберегающий режим может включать в себя активацию, по крайней мере одной из следующих систем: системы остановки-запуска, автомобильной системы работы двигателя на холостом ходу, системы двигателя с отключаемыми цилиндрами, системы парковочного ассистента, системы снижения токсичности выхлопа транспортного средства или режима работы только в качестве электромобиля для гибридных электромобилей. Энергосберегающий режим может дополнительно предусматривать снижение напряжения на устройстве накопления энергии, подающем электроэнергию для сообщения движения электромобилю, работающему в условиях пониженной электрической нагрузки. Энергосберегающий режим может дополнительно включать в себя систему транспортного средства, которая изменяет работу системы трансмиссии во время работы транспортного средства для экономии топлива.
Способ управления автомобилем может также включать в себя управление автомобилем в энергосберегающем режиме, избирательное сохранение энергосберегающего режима при реагировании на указание об отсутствии встречного транспортного средства для обеспечения экономии энергии и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима в рамках реагирования на указание о присутствии встречного транспортного средства для обеспечения реагирования транспортного средства на встречный транспортный поток, при этом присутствие встречного транспортного средства подразумевает присутствие встречного транспортного средства, движущегося в пределах первого порогового расстояния от транспортного средства. Кроме того, транспортное средство может двигаться со скоростью, превышающей пороговую скорость.
Избирательное сохранение энергосберегающего режима может осуществляться как реагирование на указание об отсутствии встречного транспортного средства, причем в данной ситуации встречным автомобилем является встречное транспортное средство, движущееся по той же самой полосе, по которой движется транспортное средство, и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима может осуществляться как реагирование на указание о присутствии встречного транспортного средства, движущегося по той же самой полосе, по которой движется транспортное средство. Присутствие встречного транспортного средства, движущегося по той же самой полосе, по которой движется транспортное средство, может, кроме того, подразумевать присутствие встречного транспортного средства, движущегося по той же самой полосе, по которой движется транспортное средство, в пределах второго порогового расстояния от транспортного средства, которое меньше, чем первое пороговое расстояние, или встречного транспортного средства, движущегося по той же самой полосе, по которой движется транспортное средство, если такой встречное транспортное средство достигнет второго порогового расстояния от транспортного средства через пороговый период времени.
Избирательное сохранение энергосберегающего режима может дополнительно осуществляться как реагирование на указание об отсутствии встречного транспортного средства, причем в данной ситуации встречным автомобилем может являться встречное транспортное средство, движущееся по полосе, соседней той, по которой движется транспортное средство, и запрет перехода в энергосберегающий режим или выход из энергосберегающего режима может осуществляться как реагирование на указание о присутствии встречного транспортного средства, движущегося по полосе, соседней той, по которой движется транспортное средство. Присутствие встречного транспортного средства, движущегося по полосе, соседней той, по которой движется транспортное средство, дополнительно может подразумевать встречное транспортное средство, движущееся по полосе, соседней той, по которой движется транспортное средство, в пределах третьего порогового расстояния от транспортного средства, которое меньше второго порогового расстояния.
Встречным автомобилем может дополнительно быть встречное транспортное средство, движущееся по полосе, непараллельной полосе, по которой движется транспортное средство, в пределах четвертого порогового расстояния от транспортного средства, при этом четвертое пороговое расстояние меньше третьего порогового расстояния, но больше второго порогового расстояния.
Можно отметить, что примерные сценарии процесса, описанные в настоящем документе, могут быть использованы с различными конфигурациями системы двигателя и/или транспортного средства. Описанные процедуры могут представлять собой один или несколько принципов обработки, такие как принцип событийного управления, управления прерываниями, многозадачный режим, многопоточный режим, и прочие. По существу, различные действия, операции или функции могут быть выполнены в указанной последовательности, параллельно, или, в некоторых случаях, пропущены. Аналогично, порядок действий не является обязательным, чтобы достичь характеристик и эффекта описанных примерных вариантов выполнения, он представлен для объяснения иллюстраций и описания. Одно или более проиллюстрированных действий или функций может быть повторено в зависимости от конкретной используемой стратегии. Кроме того, описанные действия могут графически воспроизводить код, запрограммированный в машиночитаемом носителе в системе управления двигателем.
Следует понимать, что допускаются различные изменения и модификации изобретения без выхода за рамки его сущности. Например, описанная выше технология может применяться к двигателям V-6, I-4, I-6, V-8, V-10, V-12, оппозитным четырехцилиндровым, и другим типам двигателей.
Реферат
Изобретение относится к области круиз-контроля. Управляют автомобилем в энергосберегающем режиме. Избирательно сохраняют энергосберегающий режим при наличии указания об отсутствии встречного транспортного средства для обеспечения экономии топлива. Запрещают переход в энергосберегающий режим или выход из энергосберегающего режима при наличии указания о присутствии встречного транспортного средства для обеспечения реагирования транспортного средства на встречный транспортный поток. Предложены также способ управления транспортным средством и система транспортного средства. Достигается избирательное сохранение энергосберегающего режима, а также запрещение входа в энергосберегающий режим и выхода из энергосберегающего режима в ответ на указание присутствия встречного транспортного средства для поддержания реагирования транспортного средства на встречный транспортный поток. 3 н. и 17 з.п. ф-лы, 8 ил.
Комментарии