Способ и модуль для определения опорных значений для систем управления транспортными средствами - RU2493988C2
Код документа: RU2493988C2
Чертежи




Описание
Область техники
Настоящее изобретение относится к способу и модулю для определения заданных значений для систем управления транспортными средствами в соответствии с преамбулой независимых пунктов.
Уровень техники
Многие транспортные средства сегодня оборудованы устройством автоматического поддержания скорости для облегчения управления транспортным средством. Желаемая скорость может быть задана водителем, например, при помощи устройства управления в консоли рулевого колеса, и система автоматического поддержания скорости транспортного средства после этого воздействует на систему управления таким образом, чтобы она ускоряла и затормаживала транспортное средство, чтобы сохранить желаемую скорость. Если транспортное средство оборудовано автоматической системой переключения передач, передачи транспортного средства переключаются таким образом, чтобы транспортное средство могло сохранять желаемую скорость.
Когда устройство автоматического поддержания скорости используется на холмистой местности, система автоматического поддержания скорости будет стремиться сохранить заданную скорость на подъемах. Это приводит, среди прочего, к ускорению транспортного средства на вершине холма и, возможно, при последующем спуске, вызывая необходимость торможения для исключения превышения заданной скорости, что является неэкономичным по топливу режимом эксплуатации транспортного средства.
Благодаря изменению скорости транспортного средства на холмистой местности можно экономить топливо по сравнению с обычным устройством автоматического поддержания скорости. Это может быть сделано различными способами, например, посредством вычислений текущего состояния транспортного средства (как с устройством Scania Ecocruise®). Если подъем вычислен, система тогда ускоряет транспортное средство на подъеме. К концу подъема система запрограммирована для исключения ускорения, пока градиент не выровняется наверху, при условии, что скорость транспортного средства не падает ниже определенного уровня. Снижение скорости в конце подъема позволяет восстановить скорость на последующем спуске без использования двигателя для ускорения. Когда транспортное средство приближается к основанию уклона, система пытается использовать кинетическую энергию для начала следующего подъема с более высокой скоростью, чем с обычным устройством автоматического поддержания скорости. Система будет легко обеспечивать ускорение в конце спуска, чтобы сохранить количество движения транспортного средства. На холмистой местности это означает, что транспортное средство начинает следующий подъем с более высокой скоростью, чем нормальная. Исключение ненужного ускорения и использование кинетической энергии транспортного средства позволяют экономить топливо.
Если топология впереди известна транспортному средству, имеющему данные карты и системы глобального позиционирования, такая система может быть сделана более надежной и также может изменять скорость транспортного средства с упреждением.
Существуют системы, которые включают топологию впереди в вычисления для скорости транспортного средства посредством оптимизаций в реальном времени скорости транспортного средства на маршруте. Это может приводить к очень большой нагрузке вычисления на аппаратные средства в системе реального времени в транспортном средстве, так как такие системы часто имеют ограниченные ресурсы с точки зрения мощности процессора и памяти. Даже выполнение обычных вычислений и моделирований, выполненных в реальном времени по известному профилю маршрута, может представлять тяжелую нагрузку вычисления. Если, например, точность или разложение векторов горизонта для вычисления дорожных градиентов слишком высоки, также задействуется излишняя вычислительная мощность.
Способ экономии вычислительной мощности для транспортного средства упомянут в опубликованной заявке на патент США № 2008/0188996, который относится к системе помощи водителю, в которой множество датчиков выдают сопутствующие коэффициенты зависимости движения и создают гипотезы, которые логически соотносятся друг с другом. Однако эта система не относится к устройствам автоматического поддержания скорости транспортных средств.
Опубликованная заявка на патент США № 2003/0163226 относится к системе для динамической оценки скорости транспортного средства. Вычислительная мощность может быть сэкономлена при использовании наблюдателя (LVP, линейное регулирование параметров).
Задачей настоящего изобретения является создание усовершенствованной системы для определения заданных значений для системы управления в транспортном средстве, которая, в частности, уменьшает величину необходимой вычислительной мощности, когда заданные значения для систем управления транспортными средствами необходимо регулировать.
Сущность изобретения
Указанная выше задача решена посредством создания способа определения заданных значений для систем управления транспортными средствами в соответствии с изобретением, включающего этапы:
A) определения горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка;
B) вычисления пороговых значений для указанной, по меньшей мере, одной характеристики участков в соответствии с одним или более из значений, специфичных для транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории;
C) сравнения указанной, по меньшей мере, одной характеристики каждого участка с расчетными пороговыми значениями и помещения каждого участка внутри горизонта в категории, по результатам сравнений;
D) вычисления заданных значений для систем управления транспортным средством согласно горизонту в соответствии с правилами, относящимися к категориям, в которых находятся участки в пределах горизонта; и
E) регулирования транспортного средства в соответствии с заданными значениями.
Изобретение также относится к модулю для определения заданных значений для систем управления транспортными средствами, содержащему:
- блок горизонта, выполненный с возможностью определения горизонта при помощи полученных данных позиционирования и данных карты маршрута, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка;
- процессорный блок, выполненный с возможностью вычисления пороговых значений для указанной, по меньшей мере, одной характеристики участков в соответствии с одним или более из значений, специфичных для транспортного средства, причем пороговые значения служат граничными значениями для назначения участков в различные категории; сравнения, по меньшей мере, одной характеристики каждого участка с расчетными пороговыми значениями и размещения каждого участка в категорию в соответствии с результатами сравнений; при этом процессорный блок также выполнен с возможностью вычисления заданных значений для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта; причем система управления регулирует транспортное средство в соответствии с этими заданными значениями.
Способ регулирования в соответствии с изобретением позволяет минимизировать количество топлива, необходимого при движении транспортного средства, благодаря учету информации о маршруте. Данные карты, например, в форме базы данных на борту транспортного средства с информацией о высоте и позиционная система, например, система глобального позиционирования, предоставляют информацию о дорожной топографии вдоль маршрута. Система управления затем снабжается заданными значениями и регулирует транспортное средство в соответствии с ними.
Использование основанного на правилах способа автоматического поддержания скорости движения вместо, например, оптимизированного движения задействует значительно меньше вычислительной мощности процессорного блока, который выполняет вычисления в транспортном средстве. Кроме того, данные, описывающие горизонт впереди, можно сократить, принимая во внимание различные физические пороговые значения. Сокращение данных горизонта означает меньшую потребность в использовании памяти и быстрых вычислениях, позволяя сокращать величину необходимой вычислительной мощности.
Использование основанного на правилах способа дает предсказуемый надежный способ, который может позволять быстро вычислять заданные значения для системы управления или систем управления в транспортном средстве.
Предпочтительные варианты осуществления изобретения описаны в зависимых пунктах и в подробном описании.
Краткое описание прилагаемых чертежей
Изобретение описано ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1 - функциональный контекст модуля регулирования в транспортном средстве в соответствии с вариантом осуществления изобретения;
Фиг.2 - блок-схема способа в соответствии с вариантом осуществления изобретения;
Фиг.3 - блок-схема способа в соответствии с другим вариантом осуществления изобретения;
Фиг.4 - иллюстрация длины горизонта системы управления относительно длины маршрута для транспортного средства; и
Фиг.5 - иллюстрация различных прогнозированных скоростей и категорий участков, которые непрерывно обновляются по мере добавления к горизонту новых участков.
Подробное описание предпочтительных вариантов осуществления изобретения
Информация о маршруте транспортного средства может использоваться для определения его заданной скорости vref для системы управления двигателем в транспортном средстве с упреждением для экономии топлива, повышения безопасности и комфорта. Другие заданные значения для других систем управления также можно регулировать. Топография значительно воздействует на управление, в частности, на трансмиссию грузовых автомобилей, так как требуется намного больший крутящий момент при подъеме, чем при спуске, и обеспечение подъема на некоторые возвышения без переключения передачи.
Транспортное средство снабжено системой позиционирования и информацией карты, и топологические данные от системы позиционирования и топологические данные от информации карты используются для создания горизонта, который показывает характер маршрута. В описании настоящего изобретения система глобального позиционирования обозначена для определения топологических данных для транспортного средства, но следует понимать, что другие виды глобальных или региональных систем позиционирования также могут рассматриваться для снабжения транспортного средства данными позиционирования, например, систем, в которых используется радиоприемник для определения положения транспортного средства. В транспортном средстве также могут использоваться датчики для сканирования окрестностей и, таким образом, определения его положения.
На фиг.1 показано, как блок включает информацию карты и системы глобального позиционирования о маршруте. Маршрут показан ниже как единственный маршрут для транспортного средства, но следует понимать, что различные потенциальные маршруты включены в систему, как информация от карт и системы глобального позиционирования или других систем позиционирования. Водитель также может регистрировать исходную точку и пункт назначения намеченного маршрута, когда блок использует данные карты и т.д., для вычисления пригодного маршрута. Маршрут или, если существуют две или больше возможных альтернатив, маршруты посылаются поразрядно через контроллерную сеть к модулю для регулирования заданных значений, причем модуль может быть отдельным или может являться частью систем, которые должны использовать заданные значения для регулирования. В альтернативном варианте блок с картами и системой позиционирования также может быть частью системы, которая использует заданные значения для регулирования. В модуле регулирования биты соединяются в блоке горизонта для формирования горизонта и обрабатываются процессорным блоком для получения внутреннего горизонта, благодаря которому система управления может регулировать. Если существуют два или больше альтернативных маршрутов, создается множество внутренних горизонтов для альтернативных вариантов. Система управления может быть любой из различных систем управления в транспортном средстве, например, системой управления двигателем, системой управления коробкой передач или некоторой другой системой управления. Горизонт обычно составляется для каждой системы управления, так как системы управления регулируют различными параметрами. Горизонт тогда непрерывно дополняется новыми битами от блока данными системы глобального позиционирования и данными отображения для поддержания желательной длины горизонта. Горизонт, таким образом, непрерывно обновляется, когда транспортное средство находится в движении.
Контроллерная сеть представляет собой систему последовательной шины, специально разработанную для использования в транспортных средствах. Шина данных контроллерной сети обеспечивает обмен цифровыми данными между датчиками, регулирующими компонентами, приводами, управляющими устройствами и т.д. и обеспечивает то, что два или более управляющих устройств могут иметь доступ к сигналам от данного датчика, чтобы использовать их для управляющих компонентов, связанных с ними.
На фиг.2 показана блок-схема, поясняющая этапы, которые содержит способ, соответствующий варианту осуществления изобретения. Пример, описанный ниже, относится только к одному горизонту, но следует понимать, что два или больше горизонтов могут быть созданы для различных альтернативных маршрутов параллельно. Первый этап A) определяет горизонт на основе данных позиционирования и данных карты, составленный из участков, по меньшей мере, с одной характеристикой для каждого участка. Когда транспортное средство находится в движении, модуль горизонта соединяет биты для формирования горизонта маршрута, причем длина горизонта составляет, в типичном случае, от 1 до 2 км. Блок горизонта отслеживает местоположение транспортного средства и непрерывно дополняет горизонт таким образом, чтобы длина горизонта поддерживалась постоянной. В соответствии с вариантом осуществления изобретения, когда пункт назначения находится в пределах длины горизонта, горизонт, больше не прибавляется, поскольку движение за пределами пункта назначения не относится к делу.
Горизонт составлен из участков маршрута, которые имеют одну или более взаимосвязанных характеристик. Горизонт здесь иллюстрируется матричной формой, в которой каждая колонка содержит характеристику для участка. Матрица, покрывающая маршрут на 80 м вперед, может иметь следующую форму:
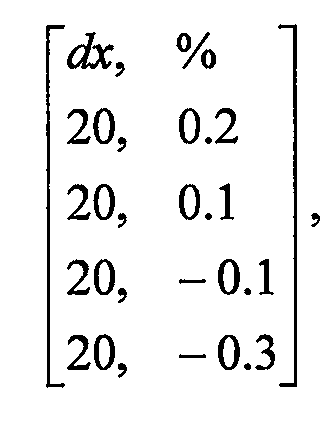
где первая колонка - это длина (dx) каждого участка в метрах, а вторая колонка - это градиент в % каждого участка. Матрицу следует рассматривать таким образом, что для 20 метров вперед от настоящего положения транспортного средства градиент составляет 0,2%, после чего следуют 20 метров с градиентом 0,1% и так далее. Величины для участков и градиенты могут не быть выражены в относительных значениях, но могут, вместо этого, быть выражены в абсолютных величинах. Матрица, предпочтительно, имеет векторную форму, но может, вместо этого, иметь структуру указателя в форме пакетов данных и т.п. Существуют различные другие потенциальные характеристики, например, радиус кривизны, дорожные знаки, различные препятствия и т.д.
В соответствии с вариантом осуществления изобретения, указанным как этап (А1) в блок-схеме на фиг.3, созданный горизонт может затем быть упрощен посредством сравнения характеристик смежных участков и комбинирования указанных смежных участков в случаях, когда разность между их характеристиками ниже определенной величины. Величина, предпочтительно, установлена таким образом, чтобы разность стала достаточно малой, чтобы не воздействовать на характеристики регулирования способа. Если, например, разность градиентов, составляющая 0,1%, считается достаточно малой в указанном выше примере, где длина и градиент являются характеристиками участка, участки один и два в векторе могут быть скомбинированы, и вместо этого может использоваться их средний градиент. Упрощенный горизонт здесь в форме упрощенной матрицы тогда представляет собой:
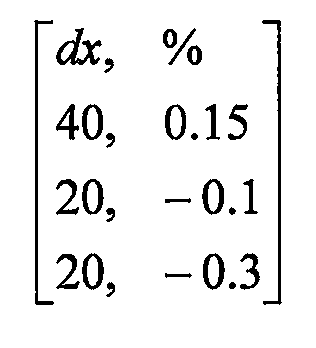
После этого упрощения или прямо после этапа A), то есть в случае отказа от выбора упрощения в соответствии с этапом A1) на фиг.3, участки в пределах горизонта размещаются в различных категориях на этапе B), в котором пороговые значения вычисляются для указанной, по меньшей мере, одной характеристики участков в соответствии с одной или более характеристик транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории. В примере, где характеристики участков являются градиентами, пороговые значения вычисляют для их градиентов. Пороговые значения для относящихся к делу характеристик вычисляются, в соответствии с вариантом осуществления изобретения, при помощи одной или более характеристик транспортного средства, например, текущего передаточного отношения, текущего веса транспортного средства, кривой максимального крутящего момента двигателя, механического трения и/или сопротивления движению транспортного средства с данной скоростью. Модель транспортного средства в системе управления используется для оценки сопротивления движению с данной скоростью. Передаточное отношение и максимальный крутящий момент являются известными величинами в системе управления транспортного средства, и вес транспортного средства оценивается в оперативном режиме.
Далее приведены примеры пяти различных категорий, в которых могут быть размещены участки, когда градиент участков используется для принятия решения по управлению транспортным средством:
Горизонтальная дорога: участок с градиентом 0 ± отклонение.
Крутой подъем: участок со слишком крутым градиентом для транспортного средства для поддержания скорости на текущей передаче.
Плавный подъем: участок с градиентом между отклонением и пороговым значением для крутого подъема.
Крутой спуск: участок с таким крутым наклонным градиентом, что транспортное средство ускоряется градиентом.
Плавный спуск: участок с наклонным градиентом между отрицательным отклонением и пороговым значением для крутого спуска.
В соответствии с вариантом осуществления изобретения, характеристиками участков являются их длина и градиент, и помещение участков в описанные выше категории включает вычисление пороговых значений в форме двух пороговых значений lmin и lmax градиента, где lmin - это минимальный градиент для транспортного средства, ускоряемого градиентом спуска, и lmax- это максимальный градиент, при котором транспортное средство может поддерживать скорость без переключения передачи при подъеме. Таким образом, транспортное средство может регулироваться в соответствии с градиентом и участком дороги впереди таким образом, что им можно управлять с экономией топлива при помощи устройства автоматического поддержания скорости на холмистой местности. В другом варианте осуществления изобретения характеристиками участков являются их длина и поперечное ускорение, и пороговые значения вычисляются в форме пороговых значений поперечного ускорения, которые классифицируют участки на основе того, какое поперечное ускорение они вызывают. Скорость транспортного средства может затем регулироваться таким образом, что им можно управлять с обеспечением экономии топлива и безопасности дорожного движения относительно изгибов дороги, то есть любое уменьшение скорости перед поворотом будет в максимально возможной степени осуществляться без использования основных тормозов. Например, допуск для категории "горизонтальная дорога", предпочтительно, составляет между 0,05% и -0,05%, когда транспортное средство движется со скоростью 80 км/ч. На основе этой же скорости (80 км/ч), lmin обычно вычисляется в диапазоне от -2 до -7%, и lmax обычно составляет 1-6%. Однако эти величины значительно зависят от текущего передаточного отношения (передача + постоянное передаточное число задней оси), характеристик двигателя и общего веса.
На следующем этапе C) способа характеристики, то есть, в этом случае, градиент каждого участка, сравниваются с расчетными пороговыми значениями, и каждый участок помещается в категорию по результатам сравнений.
Вместо этого или в дополнение, может быть, например, подобная классификация по радиусу кривизны дороги, посредством чего изгибы могут быть классифицированы по тому, какое поперечное ускорение они вызывают.
После каждого участка в пределах горизонта, помещенного в категорию, внутренний горизонт для системы управления может быть создан на основе классификации участков, и горизонт содержит для каждого участка входную скорость vi, которую должна соблюдать система управления. В соответствии с вариантом осуществления изобретения, изменение скорости, которое затребовано между двумя входными скоростями vi, линейно изменяется для получения заданных значений vref для системы управления, которая осуществляет постепенное увеличение или уменьшение скорости транспортного средства. Линейное изменение скорости приводит к вычислению постепенных изменений скорости, которые должны осуществляться для достижения изменения скорости. Другими словами, линейное изменение приводит к линейному увеличению скорости. Входные скорости vi, то есть заданные значения для систем управления транспортными средствами, вычисляются на этапе D) в соответствии со способом согласно изобретению в соответствии с горизонтом согласно правилам, относящимся к категориям, в которые помещены участки в пределах горизонта. Все участки в пределах горизонта проходятся непрерывно, и по мере добавления к горизонту новых участков входные скорости vi регулируются в них как необходимо в пределах диапазона расчетной скорости vset. Vset - это расчетная скорость, которая задана водителем, и поддержание которой желательно при помощи систем управления транспортного средства при движении в пределах диапазона. Диапазон ограничен двумя скоростями vmin и vmax, которые могут быть заданы водителем вручную или установлены автоматически посредством вычисления пригодных диапазонов, предпочтительно, вычисленных в модуле регулирования. Транспортное средство затем регулируется на этапе E) в соответствии с заданными значениями, что в описанном примере означает, что устройство автоматического поддержания скорости в транспортном средстве регулирует скорость транспортного средства в соответствии с заданными значениями.
Заданные значения vref для системы управления в транспортном средстве могут изменяться между двумя указанными выше скоростями vmin и vmax. Когда модуль регулирования прогнозирует внутренний горизонт для скорости транспортного средства, скорость транспортного средства может, в таком случае, изменяться в этом диапазоне.
Различные правила для категорий участков, таким образом, регулируют то, как должна корректироваться входная скорость vi для каждого участка. Если участок будет размещен в категории "горизонтальная дорога", изменения входной скорости vi для участка не будут происходить. Управление транспортным средством, таким образом, при удовлетворении требованиям комфорта, задействует уравнение Торричелли, приведенное ниже, для вычисления постоянного ускорения или торможения, которые должны прилагаться к транспортному средству:
v2slut=v2i+2·a·s (1),
где vi - скорость входа в участок, vslut - скорость транспортного средства в конце участка, а - постоянное ускорение/замедление, и s - длина участка.
Если участок находится в категории "крутой подъем" или "крутой спуск", конечная скорость vslut для участка прогнозируется посредством решения уравнения (2), приведенного ниже:
V2slut=(a·v2i+b)·(e(2·a·s/M)-b)a (2),
где
a=-Cd·p·A/2 (3)
b=Ftrack-Froll-Fa(4)
Ftrack=(Teng·ifinal·igear·Mgear)/rwheel (5)
Froll=flatCorr·M·g/1000∙(CrrisoF+Cb·(v2i-v2iso)+CaF·(v2i-v2iso)) (6)
Fa=M·g·sin(arctan(α)) (7)
flatCorr=1/√(1+rwheel/2,70) (8),
где Cd - коэффициент сопротивления воздуха, p - плотность воздуха, А - самая большая площадь поперечного сечения транспортного средства, Ftrack - сила, действующая от крутящего момента двигателя в направлении движения транспортного средства, Froll - сила от сопротивления качению, воздействующего на колеса, Fa- сила, воздействующая на транспортное средство из-за градиента α участка, Teng - крутящий момент двигателя, ifinal - конечная передача транспортного средства, igear - текущее передаточное отношение коробки передач, Mgear - эффективность зубчатой передачи, rwheel - радиус колеса транспортного средства, М - вес транспортного средства, CaF и Cb - коэффициенты, зависящие от скорости, относящиеся к сопротивлению качению колес, CrrisoF - постоянный член, относящийся к сопротивлению качению колес, и viso - скорость ISO, например, 80 км/ч.
На участках в категории "крутой подъем" конечная скорость vslut затем сравнивается с Vmin, и если vslut
vi=min(vmax, vi+(vmin-vslut) (9),
иначе изменение vi не происходит, так как vslut удовлетворяет требованию нахождения в пределах диапазона для расчетной скорости.
На участках в категории "крутой спуск" конечная скорость vslut сравнивается с Vmax, и если vslut>vmax, то vi должна быть уменьшена таким образом, чтобы
vi=max(vmin, vi-(vslut-vmax)) (10),
иначе изменение vi не происходит, так как vslut удовлетворяет требованию нахождения в пределах диапазона для расчетной скорости.
Уравнение Торричелли (1) здесь снова используется для вычисления того, возможно ли достижение Vslut с входной скоростью vi с соблюдением требований комфорта, то есть с заданным максимальным постоянным ускорением/замедлением. Если это невозможно из-за длины участка, vi увеличивается или уменьшается таким образом, чтобы могло соблюдаться требование комфорта, то есть не слишком большое ускорение/замедление.
На участках в категории "плавный подъем" заданное значение vref может изменяться между vmin и vset, когда включен новый участок, то есть vmin≤vref≤vset. Если vref≥Vmin, ускорение транспортного средства не осуществляется. Однако если vref
Когда участок, который следует после участка в пределах горизонта, который находится в категории "плавный подъем" или "плавный спуск", вызывает изменение входных скоростей относительно участков в этих категориях, это может означать, что входные скорости и, следовательно, заданные скорости для системы управления корректируются и становятся более высокими или низкими, чем задано указанными выше правилами для категорий "плавный подъем" или "плавный спуск". Таким образом, это применяется, когда входные скорости для участков корректируются согласно последующим участкам.
Все запрошенные изменения скорости, таким образом, осуществляются линейно посредством уравнения Торричелли (1) таким образом, что они происходят с соблюдением требований комфорта. Таким образом, общее правило требует не увеличивать заданную скорость vref на подъеме, так как любое возможное увеличение скорости vref должно иметь место прежде, чем подъем начинается, если транспортным средством следует управлять в экономичном режиме. По этой же причине, заданная скорость vref не должна быть снижена на спуске, так как любое возможное уменьшение скорости vref должно иметь место перед движением на спуске.
Благодаря непрерывному прохождению через все участки в пределах горизонта, можно определять внутренний горизонт, который определяет прогнозируемые входные значения vi для каждого участка. В соответствии с вариантом осуществления изобретения, этап A) выполняется непрерывно, пока горизонт не превышает запланированного маршрута для транспортного средства, и этапы B)-E) выполняются непрерывно для полной длины горизонта. Горизонт обновляется, предпочтительно, по частям и имеет, в соответствии с вариантом осуществления изобретения, не такую же непрерывность его обновления, как на этапах B)-E). Внутренний горизонт обновляется непрерывно по мере добавления к горизонту новых участков, например, два-три раза в секунду. Непрерывное прохождение участков в пределах горизонта включает непрерывное вычисление входных величин vi для каждого участка, и вычисление входной величины vi может вызывать необходимость изменения входных значений как вперед, так и назад в пределах внутреннего горизонта. Где, например, прогнозируемая скорость на участке вне заданного диапазона, необходимо скорректировать скорость на предыдущих участках.
На фиг.4 показан внутренний горизонт относительно маршрута. Внутренний горизонт непрерывно перемещается вперед, как обозначено показанным пунктиром перемещающимся вперед внутренним горизонтом. На фиг.5 показан пример внутреннего горизонта, в котором различные участки помещены в категории. На схеме "LR" относится к "горизонтальной дороге", "GU" к "плавному подъему", "SU" к "крутому подъему" и "SD" к "крутому спуску". Первоначально скорость составляет v0, и если она не равна vset, заданные значения линейно изменяются от v0 до vset с соблюдением требований комфорта в соответствии с уравнением Торричелли (1), поскольку категория соответствует "горизонтальной дороге". Следующий участок - это "плавный подъем", и изменение vref не осуществляется, пока vmin≤vref≤vset, поскольку ускорение на этом участке не должно осуществляться. Следующий участок - это "крутой подъем", при этом конечная скорость V3 для него прогнозируется посредством формулы (2), и, таким образом, V2 должна быть увеличена, если V3
Настоящее изобретение также относится к модулю для регулирования заданного значения для систем управления транспортными средствами, показанному на фиг.1. Модуль содержит блок горизонта, выполненный с возможностью определения горизонта при помощи полученных данных позиционирования и данных карты, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка. Модуль также содержит процессорный блок, выполненный с возможностью выполнения этапов В)-D) способа, описанных выше. Транспортное средство затем регулируется в соответствии с заданными значениями на этапе F). В результате получен модуль, который может использоваться в транспортном средстве для регулирования заданных значений эффективным в вычислительном отношении способом, и модуль может быть частью системы управления, для которой он предназначен, для регулирования заданных значений, или может быть автономным модулем, отдельным от системы управления.
Специфические характеристики транспортного средства, такие как текущее передаточное отношение, текущий вес транспортного средства, кривая максимального крутящего момента двигателя, механическое трение и сопротивление движению транспортного средства с данной скоростью, предпочтительно, заданы процессорному блоку. Пороговые значения, таким образом, могут быть определены на основе состояния транспортного средства в этот момент. Сигналы, необходимые для определения этих величин, могут быть получены из контроллерной сети или могут быть обнаружены соответствующими датчиками.
В соответствии с вариантом осуществления изобретения, характеристиками участков являются их длина и градиент, и процессорный блок выполнен с возможностью вычисления пороговых значений в форме пороговых значений lmin и lmax градиента. Таким образом, скорость транспортного средства может регулироваться в соответствии с волнистостью маршрута для движения в режиме экономии топлива.
В соответствии с другим вариантом осуществления изобретения, характеристиками участков являются их длина и поперечное ускорение, и процессорный блок выполнен с возможностью вычисления пороговых значений в форме пороговых значений поперечного ускорения. Это означает, что скорость транспортного средства может регулироваться в соответствии с кривизной дороги впереди, и скорость транспортного средства может быть предварительно отрегулирована таким образом, чтобы ненужные торможения и увеличения скорости были минимизированы для экономии топлива.
В соответствии с вариантом осуществления изобретения, процессорный блок в модуле выполнен с возможностью упрощения горизонта в соответствии с указанным выше этапом A1) способа. Следующее из этого уменьшение количества данных позволяет уменьшить потребность в вычислительной мощности.
Блок горизонта, предпочтительно, выполнен с возможностью непрерывного определения горизонта, пока горизонт не превышает запланированного маршрута для транспортного средства, и процессорный блок выполнен с возможностью непрерывного осуществления этапов для вычисления и обновления заданных значений для системы управления для полной длины внутреннего горизонта. В варианте осуществления изобретения горизонт, таким образом, создается по частям прогрессивно по мере движения транспортного средства по маршруту. Заданные значения для системы управления вычисляются и обновляются непрерывно независимо от того, прибавлены ли новые участки или нет, так как заданные значения, которые будут вычисляться, зависят также от того, как специфические характеристики транспортного средства изменяются вдоль маршрута.
Настоящее изобретение также включает компьютерное программное обеспечение, содержащее команды компьютерной программы для выполнения компьютерной системой транспортного средства этапов в соответствии со способом, когда команды компьютерной программы выполняются указанной компьютерной системой. Команды компьютерной программы, предпочтительно, хранятся на носителе, который пригоден для считывания компьютерной системой, например, компакт-диске, флэш-памяти, или они могут быть переданы без проводов или по линии в компьютерную систему.
Настоящее изобретение не ограничено описанными выше вариантами его осуществления. Могут использоваться различные альтернативы, модификации и эквиваленты. Приведенные выше варианты осуществления изобретения не ограничивают объем изобретения, который определен прилагаемой формулой изобретения.
Реферат
Группа изобретений относится к системам управления транспортными средствами. Способ определения заданных значений для систем управления транспортными средствами включает этапы, на которых определяют горизонт при помощи данных позиционирования и данных карты маршрута; вычисляют пороговые значения для характеристики участков; сравнивают характеристики каждого участка с расчетными пороговыми значениями; вычисляют заданные значения для систем управления транспортным средством и регулируют транспортное средство в соответствии с заданными значениями. Модуль для определения заданных значений содержит блок горизонта, определяющий горизонт при помощи полученных данных позиционирования и данных карты маршрута, и процессорный блок, вычисляющий пороговые значения для характеристики участков. Решение направлено на снижение вычислительной мощности. 2 н. и 12 з.п. ф-лы, 5 ил.
Формула
A) определения горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка;
B) вычисления пороговых значений для указанной, по меньшей мере, одной характеристики участков в соответствии с одним или более из значений, специфичных для транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории;
C) сравнения указанной, по меньшей мере, одной характеристики каждого участка с расчетными пороговыми значениями и помещения каждого участка внутри горизонта в категории по результатам сравнений;
D) вычисления заданных значений для систем управления транспортным средством согласно горизонту в соответствии с правилами, относящимися к категориям, в которых находятся участки в пределах горизонта; и
E) регулирования транспортного средства в соответствии с заданными значениями.
блок горизонта, выполненный с возможностью определения горизонта при помощи полученных данных позиционирования и данных карты маршрута, составленного из участков маршрута, по меньшей мере, с одной характеристикой для каждого участка;
процессорный блок, выполненный с возможностью вычисления пороговых значений для указанной, по меньшей мере, одной характеристики участков в соответствии с одним или более из значений, специфичных для транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории; сравнения, по меньшей мере, одной характеристики каждого участка с расчетными пороговыми значениями и размещения каждого участка в категорию в соответствии с результатами сравнений; и вычисления заданных значений для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которых помещены участки в пределах горизонта; при этом указанная система управления регулирует транспортное средство в соответствии с этими заданными значениями.
Комментарии