Аппарат на воздушной подушке повышенной проходимости - RU2256567C1
Код документа: RU2256567C1
Чертежи
Описание
Изобретение относится к аппаратам на воздушной подушке, оснащенным для повышения проходимости колесным или гусеничным движителем.
Из уровня техники известны аппараты на воздушной подушке (далее - АВП) и гибкие ограждения для них. Так, в патенте России №2041094, МПК B 60 V 1/14, дата публикации 09.08.1995, принятом за наиболее близкий аналог, представлен АВП, содержащий корпус, ограждение воздушной подушки, расположенное вдоль периметра корпуса, силовую установку, включающую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем для создания тяги и, по меньшей мере, с двумя нагнетателями для создания воздушной подушки, контактный движитель, соединенный с корпусом. Недостатком данного АВП является необходимость принятия дополнительных мер для обеспечения устойчивости АВП при движении и наезде на препятствия.
Решаемой изобретением задачей является расширение области эксплуатации и базирования. Технический результат изобретения состоит в достижении продольной и поперечной устойчивости, управляемости и маневренности при повышении проходимости на участках с большими уклонами и неровностями, а также узкими возможными коридорами движения.
Изобретение характеризуется следующей совокупностью существенных признаков.
АВП, как и в наиболее близком аналоге, содержит корпус, ограждение воздушной подушки, расположенное вдоль периметра корпуса, силовую установку, включающую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем для создания тяги и, по меньшей мере, с двумя нагнетателями для создания воздушной подушки, соединенный с корпусом контактный движитель, но в отличие от наиболее близкого аналога расположенный вдоль периметра корпуса воздуховод ограждения воздушной подушки разделен, по меньшей мере, на две изолированные друг от друга полости, каждая из которых соединена с соответствующим нагнетателем и пневматически связана с конусными элементами, выполненными из гибкого материала, соприкасающимися друг с другом боковыми поверхностями, каждый конусный элемент оснащен расположенными внутри своей полости двумя перфорированными диафрагмами, смыкающимися друг с другом выше нижних кромок конусного элемента, одна из указанных диафрагм простирается от нижней наружной, а другая - от нижней внутренней кромок конусного элемента, причем отношение площади проходных отверстий в мембране к площади проходных отверстий в диафрагме находится в диапазоне от 0,8 до 1,0, при этом контактный движитель оснащен механизмом его подъема и выпуска.
АВП характеризуется тем, что контактный движитель выполнен в виде гусеничного и/или колесного движителя и оснащен индивидуальным энергоприводом.
АВП характеризуется тем, что контактный движитель выполнен в виде гусеничного и/или колесного движителя и соединен трансмиссией с одним из двигателей, приводящих в действие воздушные движители и нагнетатели.
АВП характеризуется тем, что контактный движитель расположен в центральной части корпуса.
АВП характеризуется тем, что катки балансирной тележки гусеничного движителя или колеса установлены на балансире, балансир соединен с механизмом подъема-выпуска гусеничного и/или колесного движителя.
АВП характеризуется тем, что размещенный вдоль периметра корпуса воздуховод разделен на две полости мембраной, расположенной в диаметральной плоскости.
АВП характеризуется тем, что воздушный движитель выполнен в виде винта в кольце.
АВП характеризуется тем, что в струе воздушного движителя расположены горизонтальные и вертикальные рули, воздушный движитель выполнен в виде винта в кольце.
АВП характеризуется тем, что нагнетатели выполнены в виде осевых вентиляторов, входной патрубок которых направлен в сторону носа аппарата.
АВП характеризуется тем, что трансмиссия передачи крутящего момента на валы каждого из воздушных движителей и нагнетателя выполнена в виде ременной передачи.
Изобретение поясняется чертежами.
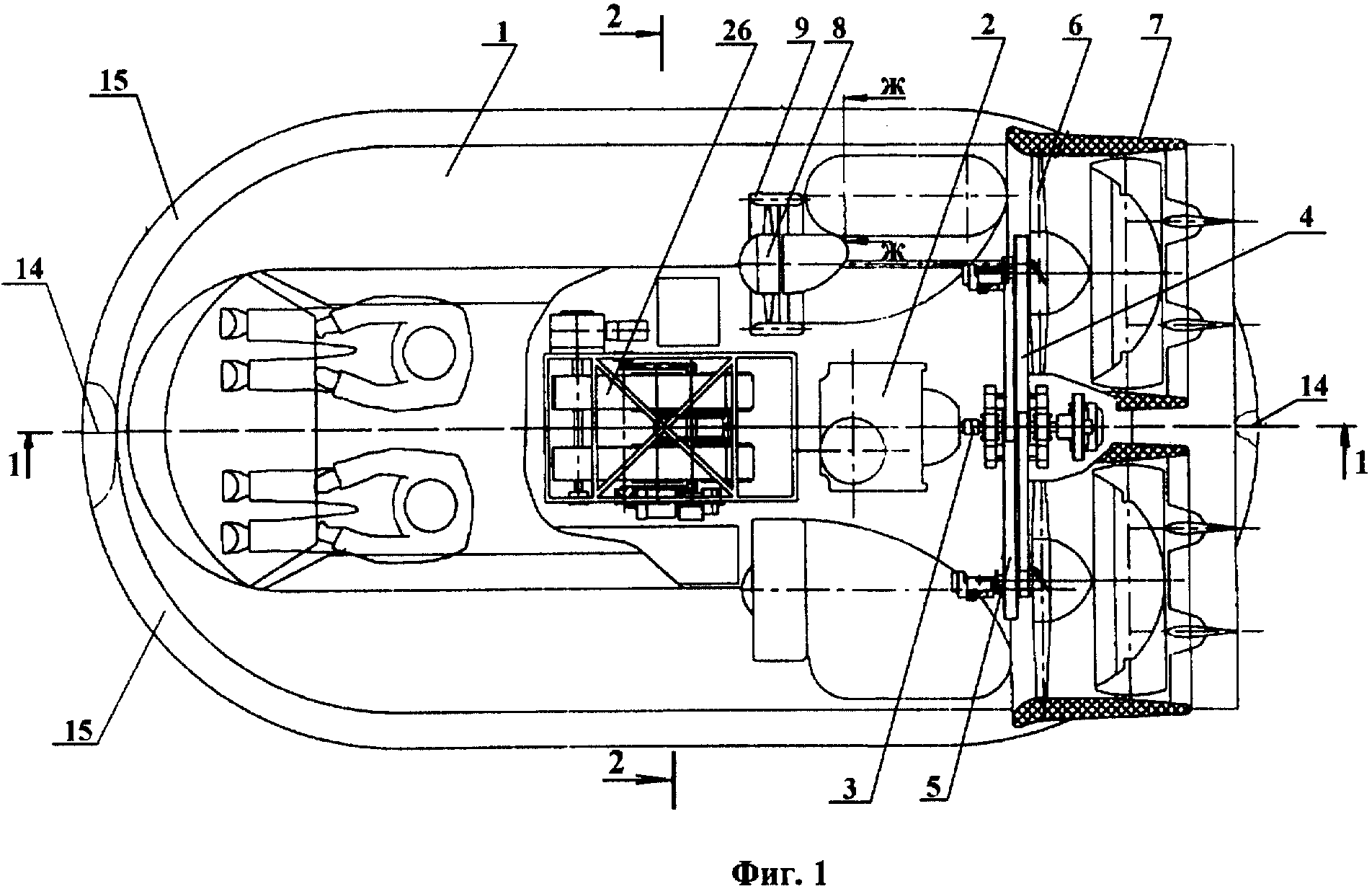
На фиг.1 представлен АВП при виде в плане.
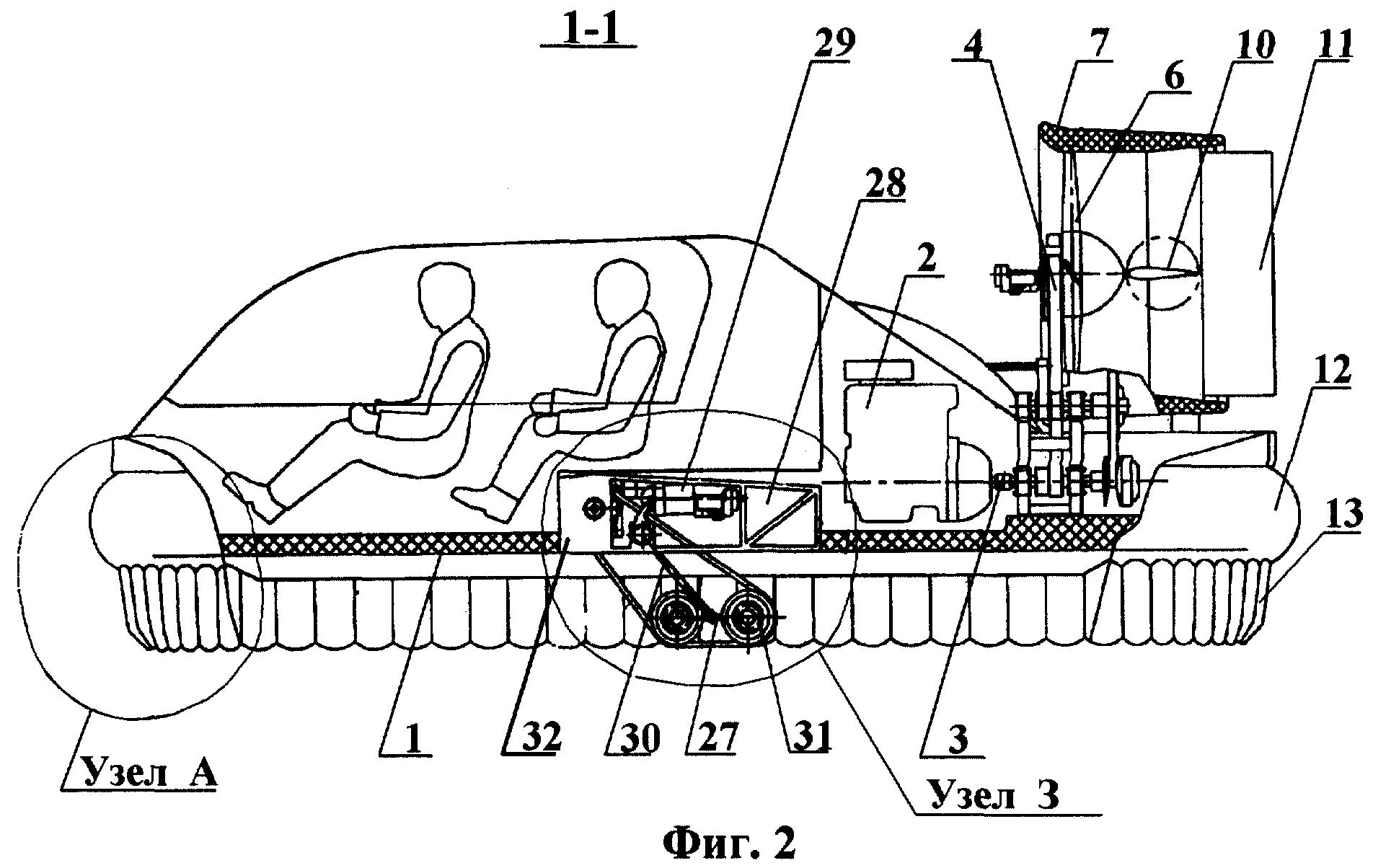
На фиг.2 показан АВП в разрезе 1-1 на фиг.1.
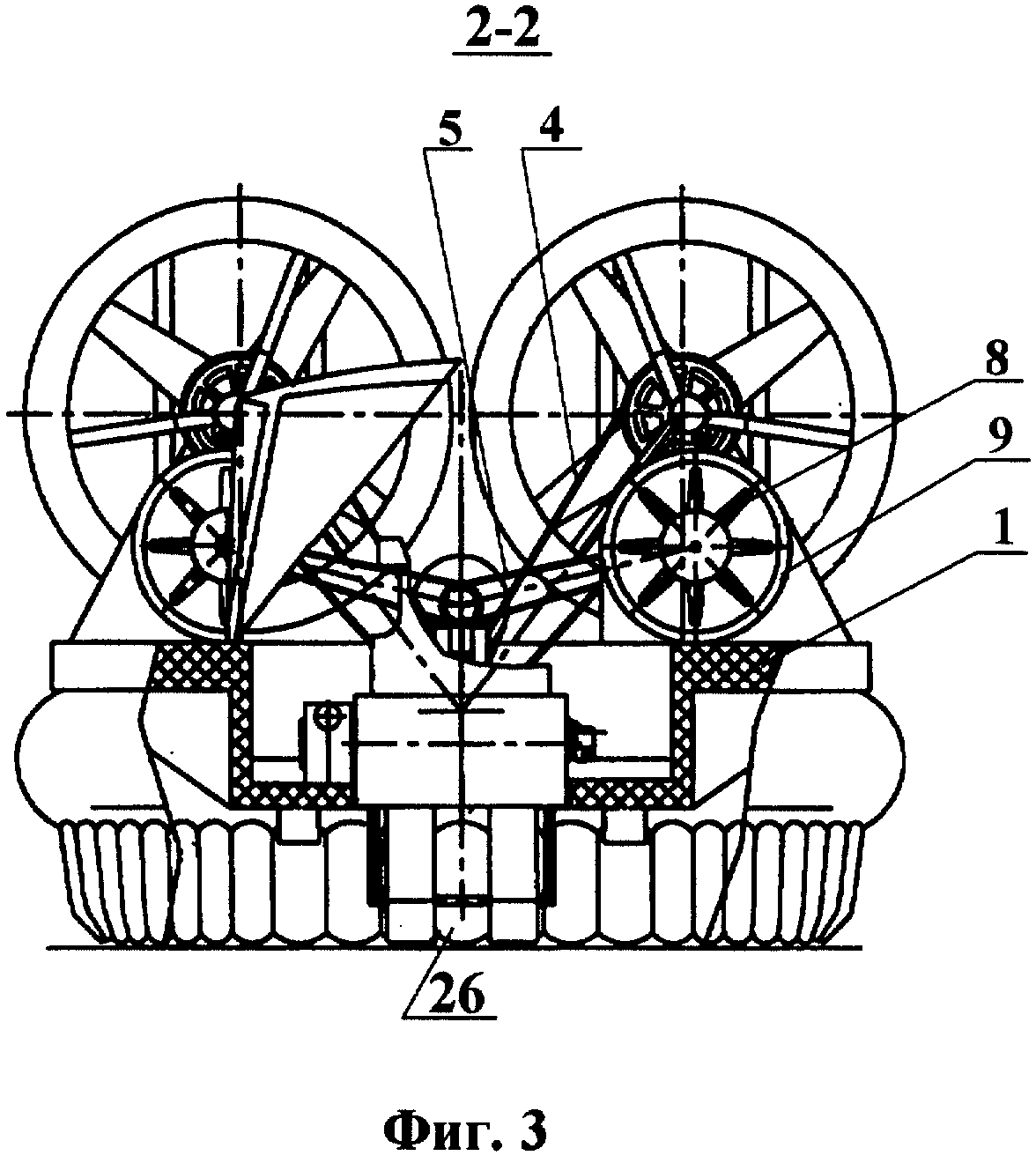
На фиг.3 показан АВП в разрез 2-2 на фиг.1.
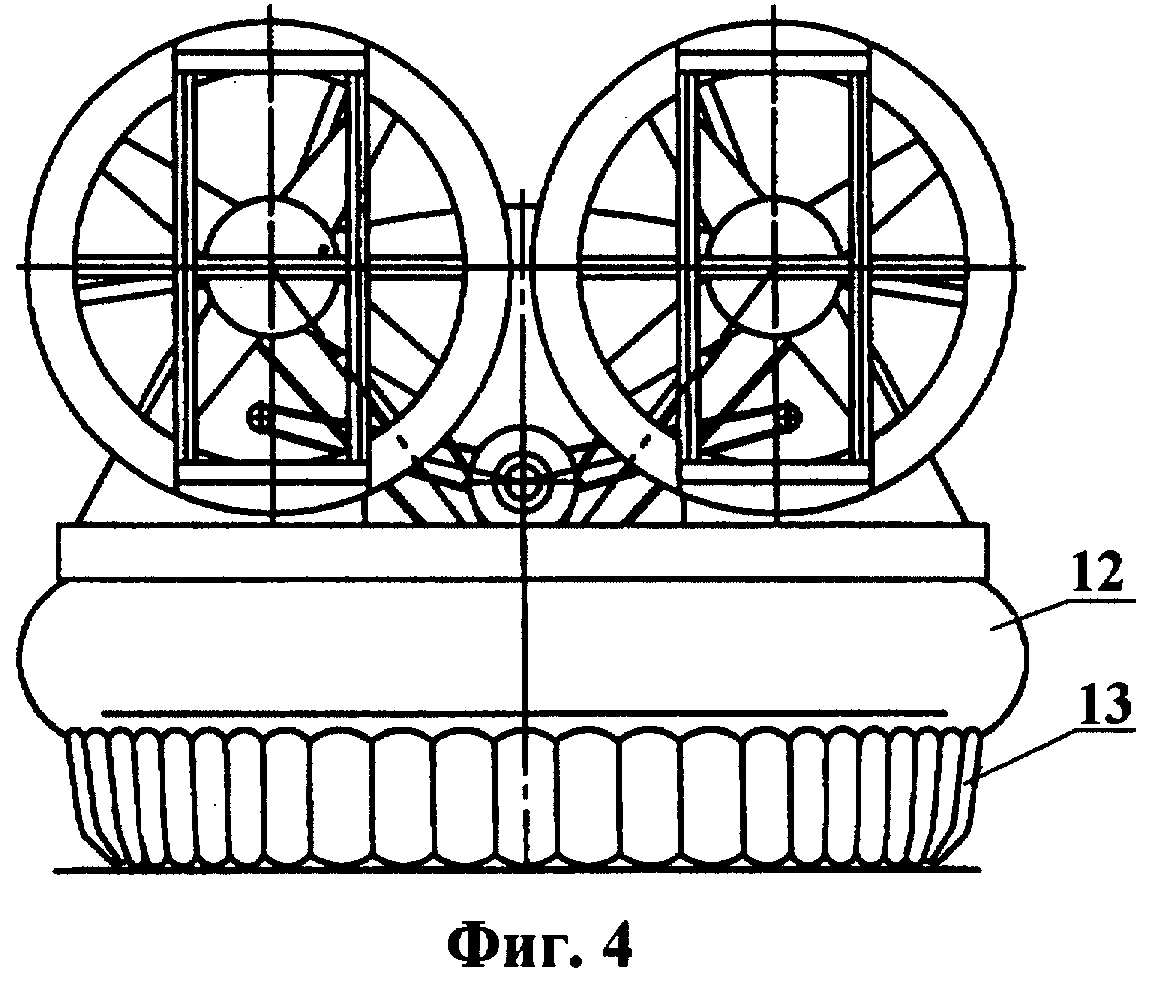
На фиг.4 показан АВП при виде сзади.
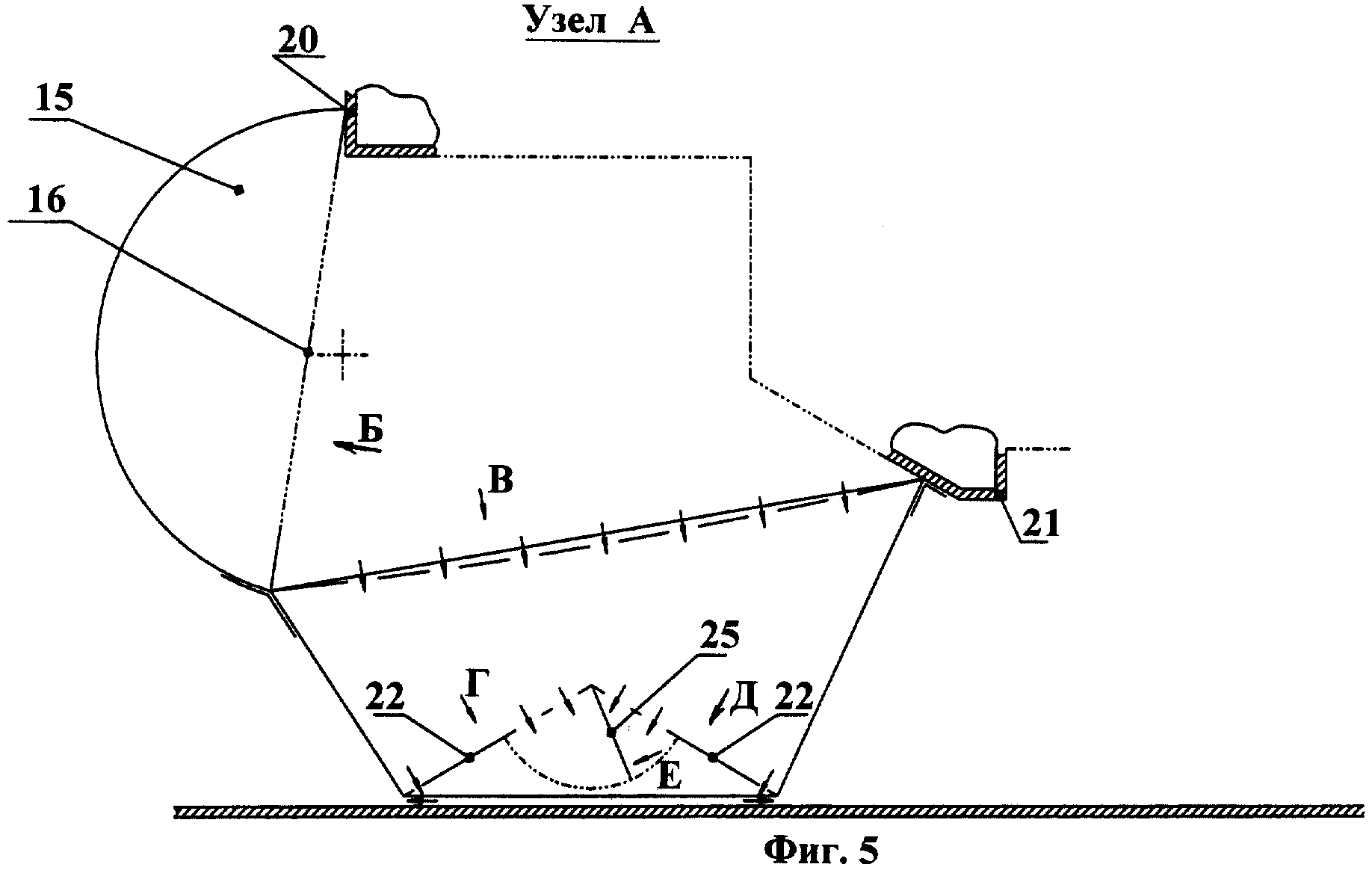
На фиг.5 приведен узел А на фиг.2.
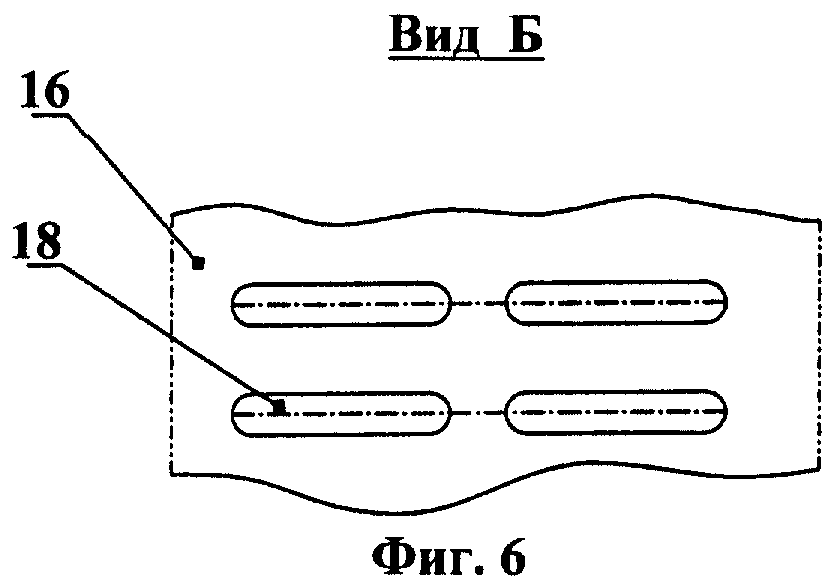
На фиг.6 показан вид Б на фиг.5.
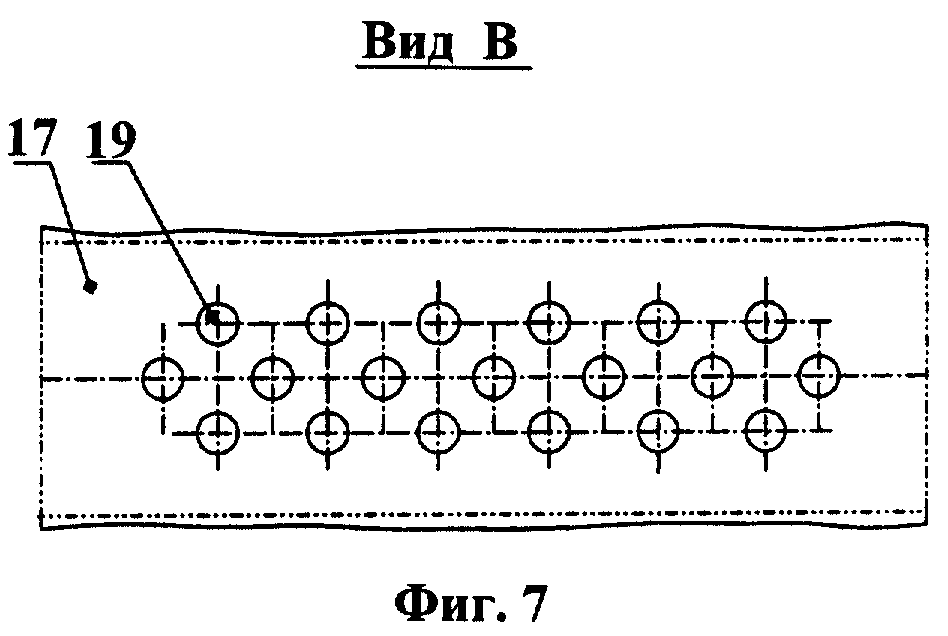
На фиг.7 показан вид В на фиг.5.
На фиг.8 показан вид Г и Д на фиг.5.
На фиг.9 показан вид Е на фиг.5.
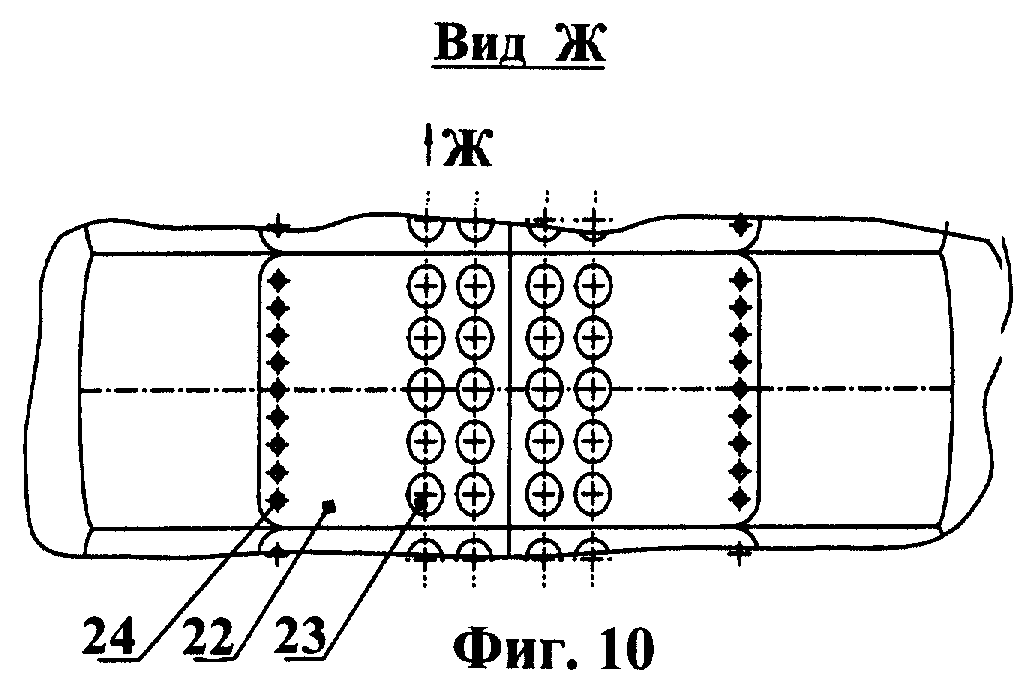
На фиг.10 показан вид Ж на фиг.5.
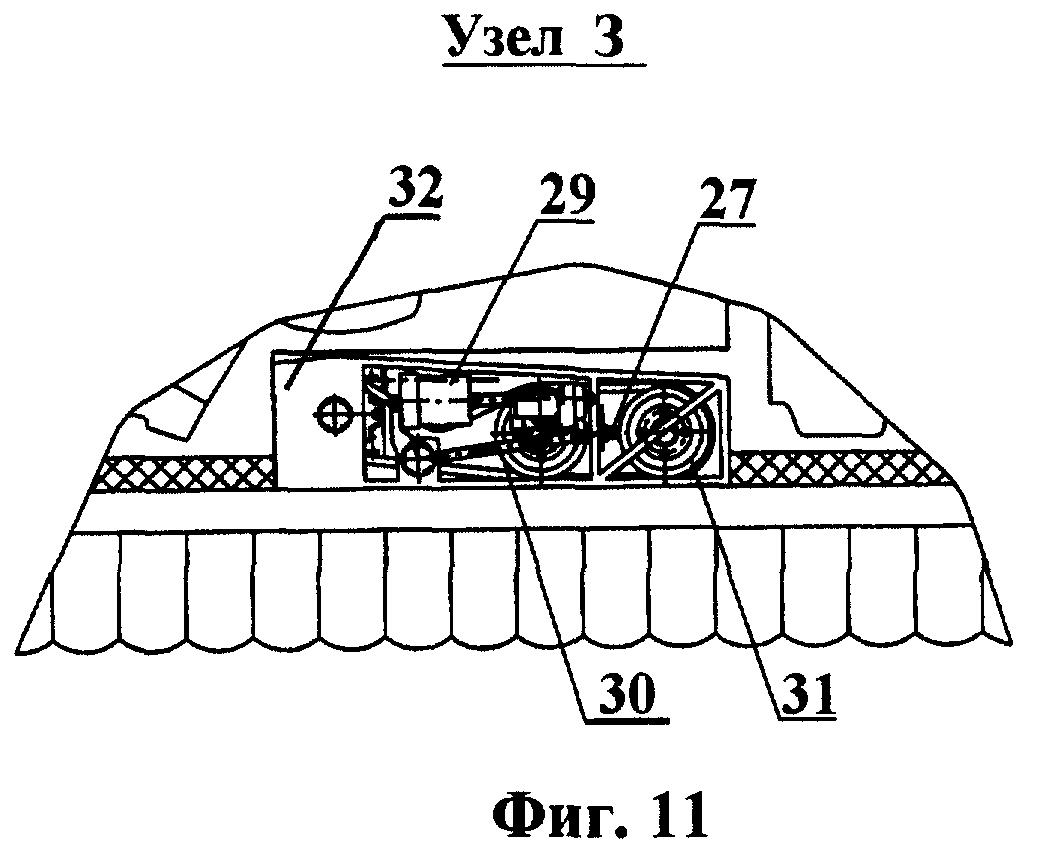
На фиг.11 показан узел З на фиг.2.
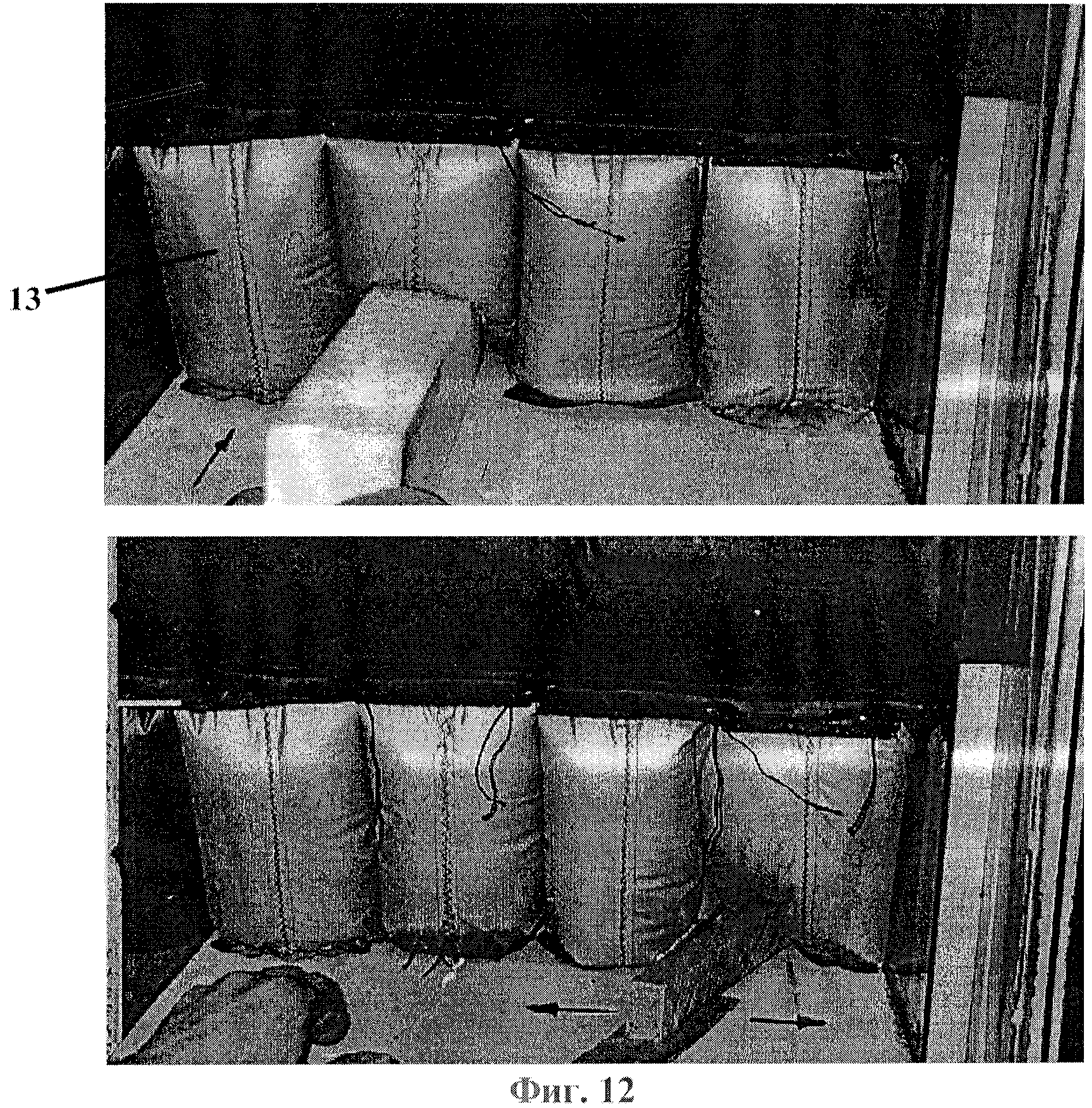
На фиг.12 показаны фотографии прохождения конусными элементами гибкого ограждения препятствия при движении вдоль и поперек препятствия.
Раскрытие изобретения.
Аппарат на воздушной подушке (АВП) содержит, как показано на фиг.1, 2, 3 и 4, корпус 1, силовую установку, содержащую, по меньшей мере, один двигатель 2 и трансмиссию, обеспечивающую кинематическую связь выходного вала 3 двигателя 2, по меньшей мере, с одним воздушным движителем для создания тяги АВП и, по меньшей мере, с двумя нагнетателями для создания воздушной подушки. Трансмиссия содержит редукторы, выполненные, например, в виде ременных передач 4 и 5 между выходным валом 3 двигателя 2 и соответственно осями воздушных движителей и осями нагнетателей. Воздушный движитель для создания тяги может выполняться в виде воздушного винта 6, в том числе в кольце 7 (с образованием винто-кольцевого движителя - ВКД), вентилятора и т.п. Нагнетатели могут выполняться в виде центробежных и осевых вентиляторов. В предпочтительном варианте выполнения АВП имеются два воздушных движителя, выполненных в виде ВКД, нагнетатели выполнены в виде двух осевых вентиляторов 8 с входными патрубками 9, обращенными в сторону носа АВП, например, при расположении оси вращения вентиляторов 8 в плоскости, параллельной оси симметрии АВП.
Винты 6 выполнены с лопастями изменяемого шага (ВИШ), за кольцами 7 ВКД установлены горизонтальные 10 и вертикальные 11 аэродинамические рули для балансировки АВП по тангажу (дифференту) и управления по курсу. По периметру корпуса 1 АВП прикреплено ограждение воздушной подушки, выполненное в виде воздуховодов 12 и соединенных с ними легкосъемных конусных элементов 13. Конусные элементы 13 выполнены сплющенными и соприкасающимися друг с другом плоскими боковыми поверхностями (фиг.11). При этом образованное воздуховодами 12 ограждение разделено мембранами 14, по меньшей мере, на две изолированные друг от друга полости 15, каждая из которых соединена с соответствующим нагнетателем, например с осевым вентилятором 8.
Воздуховоды могут выполняться в виде жесткого короба (на фиг. не показано) или с внешней стенкой из гибкого материала, закрепленной в верхней части по периметру корпуса 1, а в нижней части - с конусными элементами 13 посредством разъемного соединения, выполненного, например, в виде шнуровки (на фиг. не обозначено). При выполнении внешней стенки воздуховода 12 из гибкого материала воздуховод 12 оснащен мембранами 16 и 17 с перфорацией соответственно 18 и 19 (фиг.5, 6, 7). Мембраны 16 закреплены по контуру соединения ограждения с бортом 20 корпуса 1 и по контуру соединения ограждения с конусными элементами 13. Мембраны 17 закреплены по контуру соединения ограждения с днищем 21 корпуса 1 и по контуру соединения ограждения с конусными элементами 13.
Гибкое ограждение АВП (фиг.5...10) содержит конусные элементы 13, каждый из которых имеет площадь горизонтального сечения со стороны корпуса 1 больше площади горизонтального сечения со стороны опорной поверхности, и со стороны нижнего основания оснащен двумя диафрагмами 22 с перфорацией 23 и 24 в верхней и нижней частях диафрагм 22 (фиг.8), причем площадь перфорации 23 в верхней части превышает площадь перфорации 24 в 8...12 раз. Диафрагмы 22 выполнены смыкающимися друг с другом под углом 100...120° (фиг.5) выше нижних кромок конусного элемента 13. Одна из указанных диафрагм 22 простирается под углом 90...95° от нижней наружной кромки конусного элемента 13 к его внешней поверхности и соединена с внешней боковой стороной соответствующего конусного элемента 13, а другая диафрагма 22 простирается под углом 82...86° от нижней внутренней кромки конусного элемента 13 к его внутренней поверхности и также соединена с внутренней боковой стороной конусного элемента 13. К месту стыка диафрагм 22 крепится гибкий фартук 25 (фиг.5, 9), длина фартука практически совпадает с высотой треугольника, образованного диафрагмами 22 и нижними боковыми кромками конусного элемента 13 (фиг.5). Перфорированные диафрагмы 22 делят полость конусного элемента 13 на верхнюю и нижнюю части, величина давления внутри которых во время движения на расчетных режимах благодаря перфорированной диафрагме 22 разная. Для поддержания достаточной гибкости конусного элемента 13 и поддержания его формы при прохождении препятствий и сохранения формы под действием скоростного напора даже при падении давления в воздушной подушке до нуля, возможного при колебаниях АВП по высоте и тангажу в процессе движения по неровной поверхности, соотношение площади перфорации 19 в мембране 17 к площади перфорации 23 и 24 в диафрагмах 22 должно составлять 0,8...1,0.
Для повышения проходимости на участках с большим уклоном, а также для преодоления препятствий в виде насыпи автодороги и т.п. АВП оснащен контактным движителем 26, контактирующим с поверхностью, например колесным или гусеничным движителем, расположенным в области центра масс АВП (фиг.1, 2, 3) или с внешней стороны ограждения воздушной подушки (на фиг. не показано). Движитель 26, например колеса или гусеницы, установлены на балансирной тележке 27, которая выполнена с возможностью уборки в нишу 28 в корпусе 1 механизмом, например посредством энергопривода 29, соединенного с балансирной тележкой 27 посредством балансира 30. При этом балансир 30 шарнирно соединен с корпусом 1 и с балансирной тележкой 27, на шарнире крепления балансира 30 к корпусу 1 установлена ведущая звездочка (на фиг. не обозначена) гусеничного движителя. Балансир 30 также шарнирно соединен с энергоприводом 29. Балансир 30 может оснащаться скребками, касающимися катков 31 гусеничного движителя (фиг.11) для их очистки от налипшей грязи.
Привод контактного движителя 26 может выполняться в виде индивидуального энергопривода, например мотор-колеса 32, или кинематически соединяться с двигателем 2 посредством трансмиссии и редуктора (на фиг. не показано).
АВП повышенной проходимости функционируют следующим образом.
Крутящий момент от вала 3 двигателя 2 посредством трансмиссии, выполненной, например, с редукторами с ременными передачами 4 и 5, передается на воздушные движители и нагнетатели, например, на оси воздушных винтов 6 и оси осевых вентиляторов 8. Вентиляторами 8 воздух нагнетается в полости 15 воздуховодов 12 ограждения. Из полости 15 воздуховодов 12 ограждения воздух через перфорацию (отверстия) 19 в мембранах 17 и перфорацию (отверстия) 23 и 24 в диафрагмах 22 выходит в полость под днищем 21 (фиг.10) корпуса 1, создавая равномерно распределенное давление под днищем 21 АВП. При касании поверхности или наезде на препятствие в воздуховоде 12 ограждения, разделенном мембранами 14 на полости 15 и соединенном с конусными элементами 13, у накрененного борта в результате уменьшения зазора между элементами ограждения и опорной поверхностью давление повышается, а давление у противоположного борта в связи с увеличением этого зазора понижается. Мембраны 14 предотвращают перетекание воздуха из одной полости 15 в другую и, следовательно, не допускают выравнивания давления в полостях 15. При этом возникает восстанавливающий момент сил, который обеспечивает поперечную устойчивость. При увеличении угла тангажа внутри касающихся опорной поверхности кормовых конусных элементов 13 и в их полостях под диафрагмами 22 давление повышается вплоть до уровня давления в воздуховоде 12, а давление в носовых конусных элементах 13 в связи с увеличением зазора между конусными элементами 13 и опорной поверхностью падает. Этим обеспечивается продольная статическая устойчивость. При выполнении внешней стенки воздуховода 12 из гибкого материала, закрепляемого по периметру корпуса 1 на боковых стенках 20 и соединенного с конусными элементами 13 посредством быстросъемного соединения, например шнуровки (на фиг. не обозначена), наличие перфорированной диафрагмы 16, соединяющей места крепления внешней гибкой стенки воздуховода 12 с корпусом 1 и конусными элементами 13, обеспечивает создание заданной формы гибкого ограждения и предотвращает развитие автоколебаний АВП и вибрации гибкого ограждения.
Тяга для движения АВП создается, по меньшей мере, одним воздушным движителем, например воздушным винтом 6. Использование винтов 6 с изменяемым шагом при установке на АВП двух винтов 6 позволяет создавать управляющий момент сил по рысканию. Установленные за винтами 6 в кольцах 7 горизонтальные 10 и вертикальные 11 аэродинамические рули обеспечивают при их отклонении создание управляющего момента для балансировки АВП при изменении положения центра давления относительно центра масс АВП и управление АВП по курсу. При соотношении площади перфорации 23 и 24 в диафрагмах 22 и 19 к площади перфорации 19 в мембране 17 равном 0,8...1,0 перепад давления в полостях 15 воздуховода 12 и в конусных элементах 13 на расчетных режимах движения АВП составляет от 1,1 до 1,2, что достаточно для обеспечения требуемой поперечной и продольной устойчивости.
Гибкое ограждение, выполненное в виде конусных элементов 13, соединенных с полостями 15 баллонов 12, при подаче в него воздуха, проходящего через перфорацию 19 мембраны 17, наполняется воздухом. Выходящий через отверстия 23 и 24 воздух вытекает наружу через зазор между нижними внешними кромками конусных элементов 13 и опорной поверхностью, создавая избыточное давление под конусными элементами 13 и в полости воздушной подушки под днищем 21 корпуса 1, при накренении АВП воздух из отверстий 23, 24 частично попадает через зазор под нижней внутренней кромкой конусного элемента 13 и опорной поверхностью в полость воздушной подушки. При движении в случае наезда на препятствие (фиг.11) гибкий фартук 25 перекрывает отверстия 23 и 24, чем предохраняет их от повреждения. При деформации конусного элемента отверстия 23 и 24 одной из диафрагм 22 перекрываются гибким фартуком 25.
Наличие отверстий 24 в нижней части диафрагмы 22 обеспечивает сток воды, а также механической взвеси, захватываемой вентиляторами 8 во время старта и движения. Выполнение конусных элементов 13 легкосъемными обеспечивает удобство быстрой замены поврежденных элементов, а также при очистке от грязи и мусора при их появлении между боковыми стенками конусных элементов 13 и диафрагмами 22.
Для прохождения участков с большими уклонами, по меньшей мере до 15°, и неровностями, характерными для грунтовых дорог, энергоприводом 29 приводится в действие балансир 30, обеспечивающий выпуск из ниши 28 контактного движителя 26. Установленные на балансирной тележке 27 колеса или катки 31 с гусеничным обводом контактного движителя 26 приводятся в движение мотор-колесом 32 или ведущим катком (на фиг. не обозначено) с энергоприводом, в частности, кинематически связанным с двигателем 2 (на фиг. не показано). При этом передаваемая на движитель 26 мощность может быть небольшой по сравнению с мощностью двигателя 2, обеспечивая АВП малую скорость передвижения на сложных участках. Установленные на балансире 30 скребки, касающиеся поверхности катков 31 или колес, счищают с них налипший грунт, уменьшая энергозатраты на их вращение.
Представленное описание достаточно для реализации изобретения на специализированных предприятиях.
ПЕРЕЧЕНЬ ПОЗИЦИЙ К ЧЕРТЕЖАМ ИЗОБРЕТЕНИЯ “АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ ПОВЫШЕННОЙ ПРОХОДИМОСТИ”
1 - корпус;
2 - двигатель;
3 - выходной вал двигателя 2;
4 - ременная передача между выходным валом двигателя 2 и воздушными движителями;
5 - ременная передача между выходным валом двигателя 2 и нагнетателями;
6 - воздушный винт
7 - кольцо воздушного винта (ВКД);
8 - осевой вентилятор;
9 - входной патрубок осевого вентилятора 8, обращенный в сторону носа АВП;
10 - горизонтальные аэродинамические рули;
11 - вертикальные аэродинамические рули;
12 - воздуховод, расположенный вдоль периметра корпуса 1;
13 - конусные элементы ограждения;
14 - мембраны, делящие баллонное ограждение;
15 - полости баллонного ограждения;
16 - перфорированная мембрана, закрепленная в месте соединения внешней стенки из гибкого материала воздуховода 12 с корпусом 1;
17 - перфорированная мембрана, закрепленная в месте соединения воздуховода 12 с конусными элементами 13;
18 - перфорация в мембране 16;
19 - перфорация в мембране 17;
20 - борт корпуса 1 АВП;
21 - днище корпуса 1 АВП;
22 - диафрагма внутри конусного элемента 13;
23 - перфорация в верхней части диафрагмы 22;
24 - перфорация в нижней части диафрагмы 22;
25 - гибкий фартук;
26 - контактный движитель, контактирующий с поверхностью;
27 - балансирная тележка;
28 - ниша в корпусе 1 для уборки движителя 26;
29 - энергопривод механизма уборки движителя 26
30 - балансир контактного движителя 26;
31 - катки гусеничного движителя;
32 - мотор-колесо контактного движителя 26.
Реферат
Изобретение относится к транспорту и касается создания аппаратов на воздушной подушке повышенной проходимости. Аппарат на воздушной подушке имеет корпус, ограждение воздушной подушки, расположенное вдоль периметра корпуса, силовую установку, содержащую, по меньшей мере, один двигатель, соединенный посредством трансмиссии, по меньшей мере, с одним воздушным движителем для создания тяги и, по меньшей мере, с двумя нагнетателями для создания воздушной подушки, соединенный с корпусом контактный движитель с механизмом его подъема и выпуска. Расположенный вдоль периметра корпуса воздуховод ограждения разделен, по крайней мере, на две изолированные друг от друга полости, каждая из которых соединена с соответствующим нагнетателем и пневматически связана с конусными элементами, выполненными из гибкого материала сплющенными и соприкасающимися друг с другом по плоским боковым поверхностям. Каждый конусный элемент оснащен расположенными внутри своей полости двумя перфорированными диафрагмами. Эти диафрагмы смыкаются друг с другом выше нижних кромок конусного элемента. Одна из этих диафрагм простирается от нижней наружной, а другая - от нижней внутренней кромок конусного элемента. Отношение площади проходных отверстий в мембране, закрепленной по контуру соединения ограждения с днищем корпуса и по контуру соединения ограждения с конусными элементами, к площади проходных отверстий в диафрагме находится в диапазоне от 0,8 до 1,0. Технический результат реализации изобретения состоит в повышении эксплуатационных качеств аппарата на участках с большими наклонами и неровностями опорной поверхности. 9 з.п. ф-лы, 12 ил.
Комментарии