Гибридный экранолет - RU174731U1
Код документа: RU174731U1
Чертежи


Описание
Полезная модель относится к классу воздушных судов малой авиации, движущихся в том числе на динамической воздушной подушке с использованием экранного эффекта, возникающего в результате близости опорной поверхности, и касается конструирования экранолета с гибридной силовой установкой.
Как известно, экранолет - это разновидность экраноплана, который в соответствии с классификацией Международной морской организации сертифицирован для эксплуатации не только в зоне действия экранного эффекта, но и в режиме свободного полета на значительном удалении от опорной поверхности в пределах воздушного пространства, не занимаемого большой авиацией.
Экранолет имеет ряд неоспоримых преимуществ перед экранопланом: для полета ему не всегда нужна ровная опорная поверхность, как экраноплану, поскольку он лишен ограничений по преодолению препятствий и способен длительное время совершать полет на неограниченной высоте. Конечно, такая машина должна быть достаточно маневренной и легкоуправляемой, иметь возможность резкого увеличения подъемной силы, низкие взлетно-посадочные режимы и безопасную крейсерскую скорость.
Эффект экрана» выражается в резком увеличении подъемной силы на несущих поверхностях летательного аппарата с одновременным снижением аэродинамического сопротивления, возникающих в результате аэродинамического уплотнения слоя воздуха при полете вблизи земли или воды, что существенно повышает аэродинамическое качество летательного аппарата и положительно влияет на его экономические показатели. Тем не менее предшествующий уровень техники показывает, что этот принцип полета довольно трудно реализуем, и широкого распространения не получил. Действующие конструкции экранопланов и их разновидностей - экранолетов зачастую далеки от совершенства, сложны в производстве и обслуживании, малоэкономичны и далеко не безопасны в эксплуатации. В рамках традиционных схем и компоновок уже не удается добиться сколь-нибудь значимого увеличения аэродинамического качества, а подлинно новых концепций в авиастроении этих летательных аппаратов практически нет. Тем не менее, современные экономические интересы заставляют вновь обратить внимание конструкторов на уникальные свойства этого мобильного, независимого от инфраструктуры, экономичного и достаточно скоростного вида транспорта. Классическая транспортная система значительно перегружена, в то время как непосредственно околоземное пространство остается неосвоенным, поэтому конструирование и разработка новой «экранной» техники в настоящее время имеет научно-практическую значимость. И одним из перспективных направлений развития авиационной техники может быть разработка транспортных систем на известных физических принципах, которые до настоящего времени еще не нашли применения в авиации. По сообщениям средств массовой информации, в некоторых странах уже не первый год разрабатываются проекты летательных аппаратов с лопастными роторами, и доказана принципиальная возможность их создания.
Известен «Самолет с аэродинамическим устройством, генерирующим подъемную силу», по патенту США US 2011101173 (дата приоритета 31.03.2006 г.), разработанный компанией Fan Wing Ltd. NASA (США), сочетающий в себе преимущества как самолета, так и вертолета. Самолет с аэродинамическим устройством, генерирующим подъемную силу, состоит из фюзеляжа, крыльев по обе стороны фюзеляжа, на каждом крыле расположены секции воздушных роторов, создающих подъемную силу, а хвостовая часть каждого крыла может перемещаться относительно оси ротора и фюзеляжа для обеспечения переменной силы тяги.
В конструкции этого самолета используется главный принцип - принудительный обдув верхней плоскости крыла, из-за которого на нем создается значительное разрежение и заметно увеличивается подъемная сила.
Конструкция самолета Fan Wing имеет определенные недостатки:
- автор изобретения позиционирует машину как замену вертолету, поэтому делает свои летательные аппараты вдвое более энерговооруженными, в ущерб их полезной нагрузке и экономичности. [«Летательный аппарат Патрика Пиблса Fan Wing, технические особенности», http://science.compulenta.ru/695404];
- помимо того, что на движение и поддержание в воздухе самолету Fanwing потребуются довольно значительные затраты энергии, сама конструкция аппарата выглядит довольно громоздкой, недостаточно прочной и маневренной из-за большого размаха крыльев с длинными секциями вращающихся роторов;
- также весьма неубедительно выглядит заявленная возможность планирования на авторотации и способность достигать высоких скоростей полета, поскольку известно, что роторное крыло обладает высокой эффективностью только в ограниченном диапазоне скоростей движения, поскольку значительное превышение скорости встречного потока может привести к его срыву с лопастей роторов и резкому снижению подъемной силы на крыле. Это обстоятельство свидетельствует о возможности применения роторного крыла скорее в конструкции относительно тихоходного летательного аппарата - экраноплана и экранолета, которым, как показывает практика, большие скорости движения на сверхмалой высоте особенно опасны.
Общими конструктивными элементами у заявляемой полезной модели с данным техническим решением являются построение летательного аппарата по аэродинамической схеме «летающее крыло» и роторная движительная установка.
Наиболее близким по технической сущности аналогом, рассматриваемым в качестве прототипа, является экраноплан, описанный в патенте №135986, опубликованном 08.08.2013 г. Экраноплан содержит фюзеляж, крылья, воздушный ротор, органы управления, в основу конструкции экраноплана положена схема «летающее крыло» («крыло-корпус») с движительной установкой из двух воздушных турбин (воздушных роторов), один воздушный ротор расположен горизонтально на передней части крыла-корпуса, а второй воздушный ротор расположен горизонтально в кормовой части крыла-корпуса.
Однако такая схема пока еще не изучена в полном объеме проблем, связанных с ее практическим применением. Так, например, в случае преодоления высотных препятствий из-за недостаточной энерговооруженности аппарата мощности роторного движителя и напора воздушной струи для выработки необходимой тяги может не хватать, поскольку тангенциальные роторы, несмотря на большую массу перебрасываемого воздуха, в сравнении с воздушным винтом создают относительно низкое давление и тягу [http://ru.wikipedia.org/wiki/Beнтилятop]. Летательный аппарат такой конструкции в основном эксплуатационном режиме зависит от наличия экранного эффекта.
Также еще могут возникнуть трудности в управлении дифференциальным вращением роторов и в согласовании скоростного режима с одновременным изменением подъемной силы на крыле.
Общими признаками у заявляемой полезной модели и известного технического решения являются наличие корпуса, выполненного по аэродинамической схеме «летающее крыло», фюзеляжа, крыльев, силовой установки с воздушным ротором и двигательной установкой, органов управления.
Конструкция роторного экраноплана, использующего способ увеличения подъемной силы крыла путем обдува его верхней плоскости представляется наиболее близкой по технической сущности к заявляемому решению и выбрана в качестве прототипа.
Задачей предлагаемой полезной модели является расширение функциональных возможностей летательного аппарата.
Техническим результатом заявляемой полезной модели является создание экранолета, удобного в управлении, с оптимальными летными и техническими характеристиками как на небольшой высоте в зоне действия экранного эффекта, так и на значительном удалении от опорной поверхности.
Технический результат достигается за счет того, что экранолет выполнен по аэродинамической схеме «летающее крыло» и содержит несущее крыло-корпус с верхней выпуклой поверхностью, фюзеляж, органы управления, двигательную установку, и движительную установку с воздушными роторами, над корпусом установлено дополнительное верхнее крыло, а в задней части корпуса установлен дополнительный движитель - воздушный винт, силовая установка выполнена гибридной, на основе электродвигателя и двигателя внутреннего сгорания, которые в совокупности с движителями работают как единый энергетический комплекс, обеспечивающий подъемную силу и силу тяги.
Заявляемое техническое решение поясняется чертежами:
Фиг. 1 - вид сверху с местным разрезом экранолета (без верхнего крыла, фюзеляж показан в разрезе).
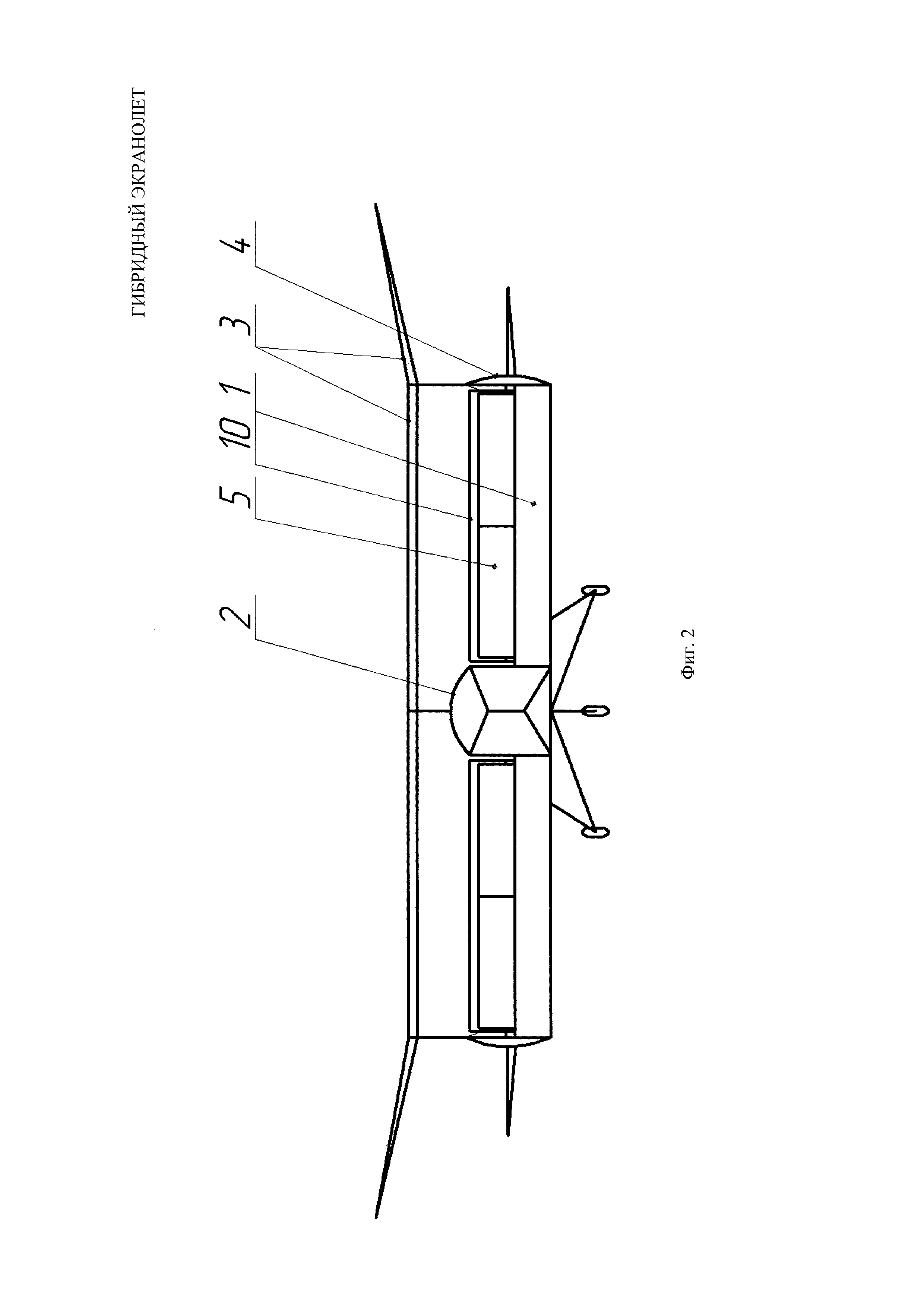
Фиг. 2 - вид экранолета спереди.
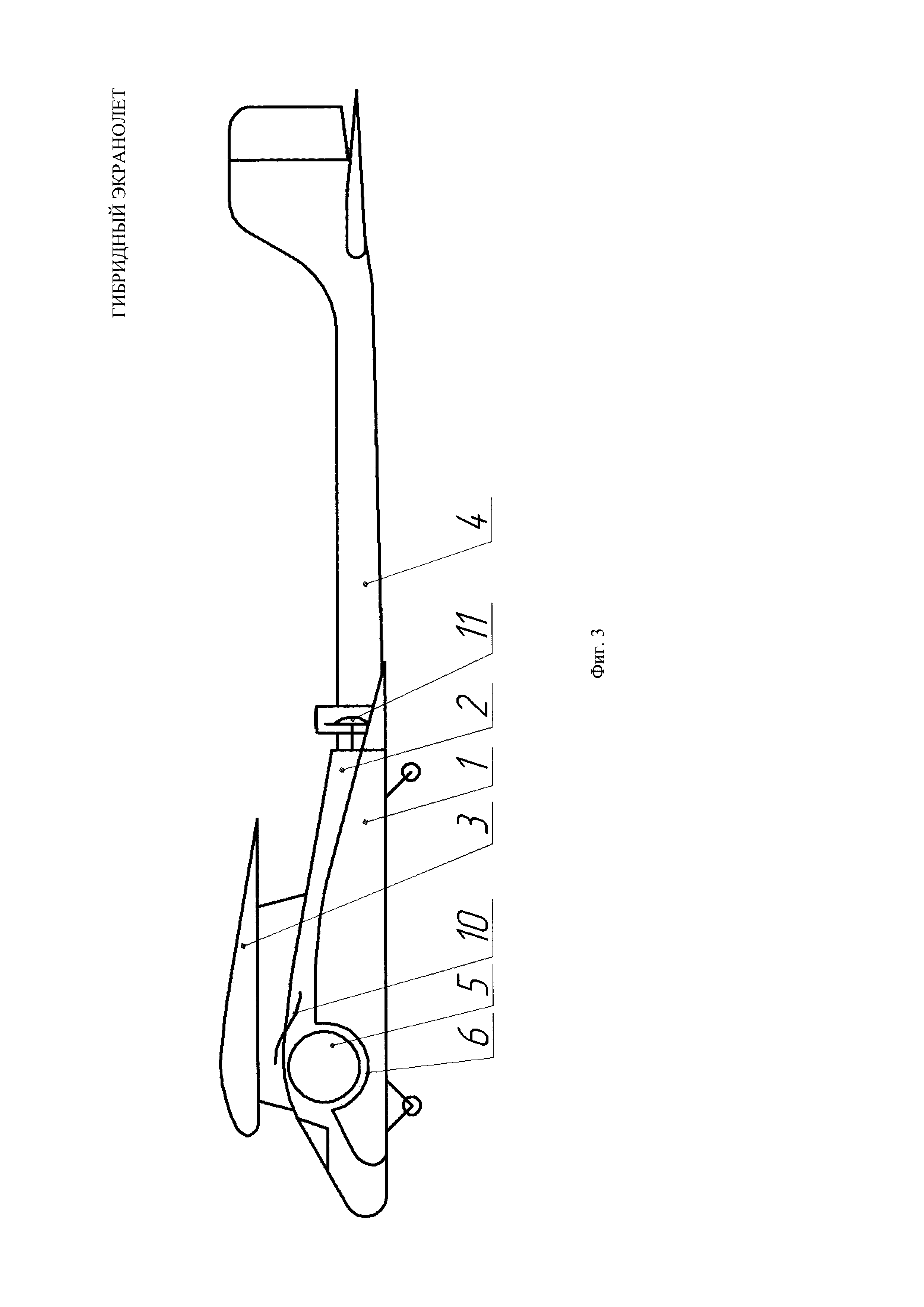
Фиг. 3 - вид экранолета сбоку (изображение без левой балки).
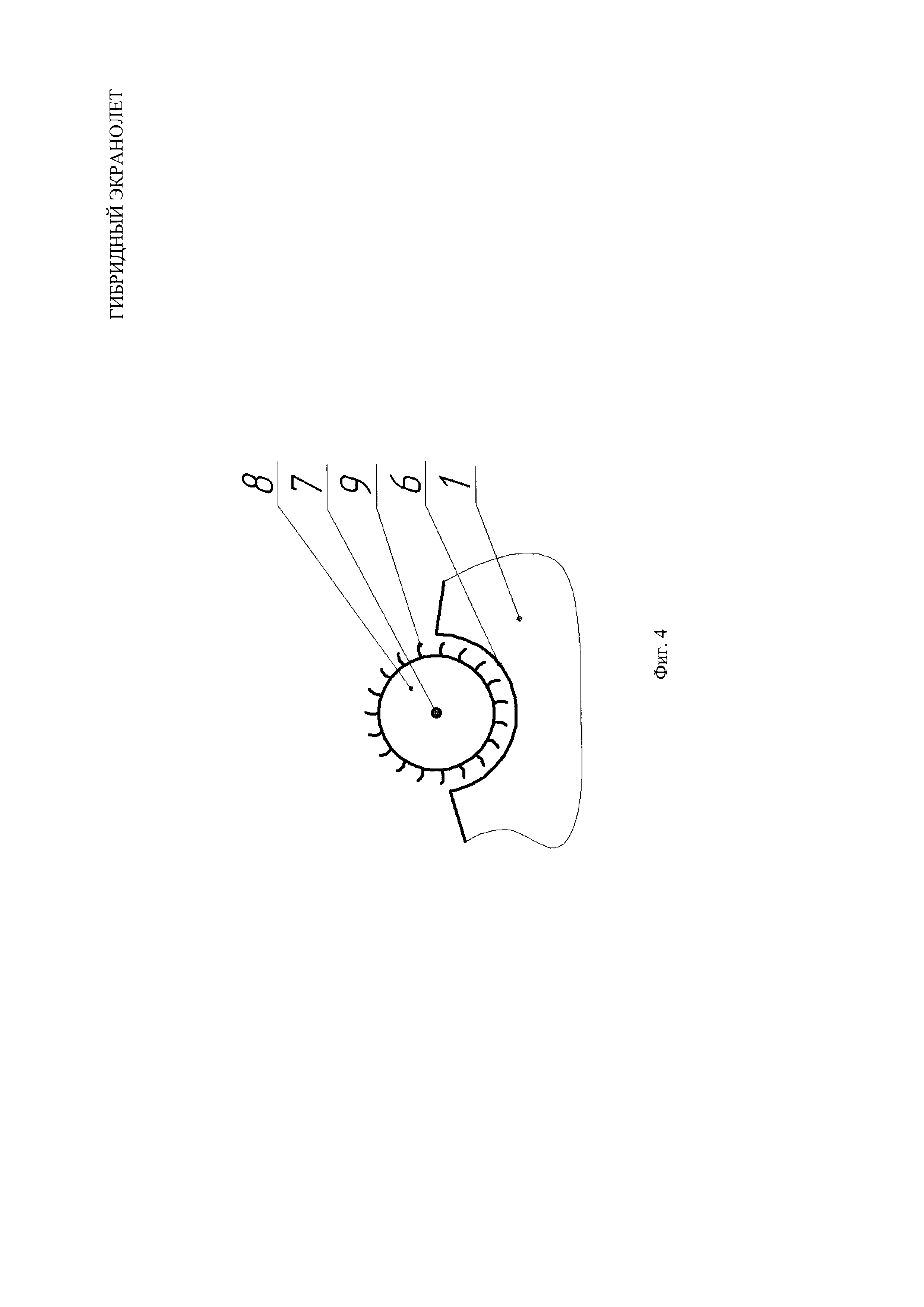
Фиг. 4 - воздушная турбина.
Фиг. 5 - схема гибридной двигательной установки.
Экранолет относится к аэродинамической схеме летающее крыло. Корпус экранолета выполнен в виде довольно объемного плоско-выпуклого крыла 1 аэродинамического продольного сечения прямоугольной в плане формы малого удлинения, на котором в основном и формируется подъемная сила при полете на «экране». Благодаря большой хорде и большой несущей площади крыла-корпуса 1 действие экрана может увеличиваться до высоты, равной хорде, а подъемная сила достигает довольно высоких значений, несмотря на довольно существенное лобовое сопротивление. Конструкция крыла-корпуса 1 включает укороченный фюзеляж 2, в котором размещены кабина и элементы силовой установки.
Над корпусом 1 на стойках закреплено дополнительное более тонкое и удлиненное верхнее крыло 3. Это высокорасположенное крыло 3 предназначено для увеличения несущей площади летательного аппарата, чтобы обеспечить прирост подъемной силы для выхода на самолетную высоту и улучшить управляемость на малых скоростях. Работая в совокупности с крылом-корпусом 1, дополнительное крыло 3 обеспечивает хорошее планирование и сохранение заданного аэродинамического качества в свободном полете, в то время как нижнее крыло-корпус 1 предназначено преимущественно для образования «экранного эффекта». Поскольку верхнее крыло 3 во время движения вынесено из-под влияния «экрана» и практически не зависит от его состояния, то оно демпфирует нестабильность воздушной подушки «экрана», обеспечивая устойчивый и безопасный полет. Крыло-корпус 1 и дополнительное крыло 3 должны быть разнесены на определенное расстояние, а их передние кромки смещены относительно друг друга таким образом, что бы возмущения потока от корпуса не оказывали негативного влияния на скорость потока у крыла 3.
Для улучшения несущих свойств крыльев на протяжении различных стадий полета, а также для лучшей балансировки и управляемости экранолета на задних кромках крыльев монтируются традиционные средства механизации: дифференциальные закрылки, элероны, щитки (на чертежах не обозначены). Практикой установлено, что закрылки на крыле роторного самолета при значительном отклонении от нейтрального положения позволяют очень медленно летать и приземляться без опасного срыва потока, что не менее важно и для экранолета [http://alternathistory.com/samolety-s-valoobraznymi-krylyami. Самолеты с валообразными крыльями].
Конструкция летательного аппарата имеет повышенное лобовое сопротивление, однако для относительно тихоходного экранолета это будет не столь значимо.
Хвостовое оперение двухбалочной схемы, балки (выносные фермы) 4 пристыкованы к боковинам корпуса 1, а кили, стабилизаторы и воздушные рули вынесены на концы балок 4 и приподняты, чтобы вывести горизонтальное оперение из возмущенного при обтекании крыла потока и исключить отрицательное влияние близости земли на продольную устойчивость при движении «на экране». Кроме того, стабилизаторы и рули высоты могут быть выполнены односторонними и разнесены наружу, а балки хвостового оперения в вариантном выполнении могут быть пристыкованы по обеим сторонам фюзеляжа и объединены одним высокорасположенным стабилизатором.
Удаление плоскостей хвостового оперения от центра масс обусловливает их эффективность и делает летательный аппарат устойчивым и хорошо управляемым.
Такая конструкция с двойным хвостовым оперением позволяет повысить стабильность полета и улучшает эффективность управления летательным средством. [Журнал «Конструкторское бюро» №08.2014, стр. 21]
Пристыкованные по каждому борту корпуса 1 балки 4 частично выступают над верхней плоскостью корпуса 1 и таким образом выполняют функцию шайб для предотвращения перетекания в стороны потока воздуха, нагнетаемого воздушными роторами 5, а также не допускают образования завихрений на нижней плоскости, повышающих лобовое сопротивление на законцовках.
В носовой части фюзеляжа 2 размещается кабина с выступающим вперед фонарем. В целях улучшения обзора при взлете и посадке нижняя сторона передней части кабины может быть выполнена прозрачной (из прочного стекла).
Тяжелые элементы силовой установки в целях улучшения центровки аппарата размещаются в районе центра масс впереди аэродинамического фокуса (центра приложения подъемной силы), поскольку от этого зависят ходовые характеристики и продольная устойчивость экранолета.
Шасси может быть колесным или любого другого типа, в зависимости от условий движения.
Двигательно-движительный комплекс экранолета состоит из гибридной силовой установки, смонтированной внутри фюзеляжа 2, и движителей (потребителей) - роторных воздушных турбин и толкающего воздушного винта 11.
Конструкция горизонтальных воздушных турбин (фиг. 4) включает в себя секцию продольных роторных нагнетателей - воздушных роторов 5, изготовленных из легких высокопрочных материалов и установленных на подшипниках в радиальных каналах 6 по обе стороны фюзеляжа 2 в передней части корпуса 1. На оси 7 каждого ротора 5 через определенные промежутки закреплены диски 8, на периферии которых параллельно оси протянуты продольные лопасти, образующие таким образом крыльчатку 9, по типу «беличье колесо». Роторы 5 установлены таким образом, чтобы лопасти крыльчатки 9 в верхнем положении выступали над верхней поверхностью корпуса 1, в то время как нижние - находились в радиальном канале 6 и были, таким образом, защищены от затормаживания встречным потоком воздуха.
Над каждым ротором 5 может быть смонтирован щиток - отражатель 10 для безотрывного перераспределения нагнетаемого потока воздуха по касательной вдоль верхней поверхности крыла-корпуса 1 в кормовую часть. Отражатель 10 может быть поворотным и выполнять роль диффузора.
Для привода роторов 5, воздушного винта 11 и других потребителей предусмотрена гибридная силовая установка на основе электродвигателя и двигателя внутреннего сгорания (ДВС). В качестве примера взята схема (фиг. 5), включающая в себя: топливный бак 13, ДВС 14, стартер-генератор 15, силовой выпрямитель 16, конвертер 17, аккумуляторную батарею 18, блок коммутирующей и управляющей электроники 19, пульт управления 20, электродвигатели воздушных турбин 21, роторы 5 воздушных турбин, электродвигатель 23, и редуктор 24 воздушного винта 11.
Система экранолета работает следующим образом. На режиме запуска электрический ток из аккумуляторной батареи 18 через конвертер 17 подается на стартер-генератор 15, который запускает двигатель внутреннего сгорания 14, после чего переводится в режим генератора и вырабатывает уже энергию переменного тока, который в силовом выпрямителе 16 преобразуется в постоянный и, подзаряжая аккумулятор, через блок коммутирующей и управляющей электроники 19 подается в электродвигатели 21, вращающие роторы 5 турбин, а также через электродвигатель 23 редуктором 24 перераспределяется на привод воздушного винта 11. Толкающий воздушный винт во время работы формирует поток воздуха, создающий основную пропульсивную тягу, необходимую для поступательного движения аппарата в воздухе. На режиме запуска электроэнергии, вырабатываемой стартер-генератором 15, недостаточно, и ее дефицит покрывается за счет энергии, запасенной в аккумуляторной батарее 18, которая позволяет обеспечить большую взлетную мощность электросиловой установки. Крутящиеся тягово-несущие роторы турбин захватывают с передней кромки крыла набегающий поток воздуха и перебрасывают его за заднюю кромку крыла. В результате ускоренного протекания воздуха вдоль аэродинамической верхней плоскости крыла понижается давление, в результате чего подъемная сила крыла возрастает, а за крылом в то же время возникает дополнительная тяга (эффект Коанда). Двигатель внутреннего сгорания в этом случае работает на оптимальных оборотах и, подзаряжая аккумулятор, полностью расходует всю свою мощность только на привод электрогенератора, от которого ток идет затем на работу роторов воздушных турбин и воздушного винта. Таким образом, блок самостоятельного источника энергии на борту экранолета оптимизирует интеграцию всей двигательной системы, что позволит экономить топливо, сокращать эмиссии выхлопных газов и уровень генерируемого шума, а это особенно актуально при полетах на малой высоте. Кроме того, электрический двигатель, как известно, наиболее прост в эксплуатации и управлении.
Воздушный винт выступает в данной конструкции движителем. Для повышения напора струи воздуха (аэродинамического КПД) винт целесообразно разместить в аэродинамической кольцевой насадке (обтекателе). Винт в кольце обтекателя наилучшим образом соответствует технике безопасности и приводит к снижению уровня генерируемого шума.
А для управления тягой винта предпочтительно вместо обычного пропеллера применить воздушный винт изменяемого шага вращения, лопасти которого во время работы могут поворачиваться вокруг своих осей и устанавливаться под нужным углом к плоскости вращения при сохранении частоты вращения. Это позволит устанавливать наивыгоднейшие углы атаки лопастей на всех режимах полета, снимать с ДВС номинальную мощность, сохранять максимальное значение КПД в большом диапазоне скоростей, а также устанавливать реверсивный режим работы пропеллера.
Роторы, работающие по принципу тангенциального (диаметрального) вентилятора, при вращении захватывают лопастями воздух с фронтальной части крыла и перебрасывают по касательной вдоль всей верхней поверхности крыла в его заднюю оконечность, увеличивая тем самым его скорость. В результате принудительной циркуляции воздуха над аэродинамической поверхностью крыла образуется зона пониженного давления и, по закону Бернулли, создаются предпосылки для возникновения подъемной силы, которая таким образом начинает вырабатываться самим летательным аппаратом даже еще на стоянке. В то же время и над самими вращающимися роторами происходит разрежение воздуха и, в соответствии с известным эффектом Магнуса инициируется подъемная сила, аналогичная возникающей при обтекании криволинейных поверхностей, которая также увеличивает несущие способности крыла. Так, по расчетам специалистов, при сравнении подъемной силы, создаваемой обычным крылом, и вращающимся цилиндром такой же площади, установлено, что последний при равный условиях создает силу, во много раз большую, чем крыло. Расчеты подъемной силы крыла самолета определялись по формуле: Y=l/2 CyQV2S, где S - площадь крыла, Су -экспериментальный коэффициент (для наиболее совершенных крыльев он не превосходит 1,2), Q - плотность среды, V2 - скорость набегающего потока. Для сравнения взят безлопастной цилиндр (ротор Флеттнера) с той же площадью диаметрального сечения: Р/Y=4π/Су≈10, т.е. оказывается, что вращающийся цилиндр при равных условиях создает силу в 10 раз большую, чем крыло. Конечно, еще нужно учитывать, что подъемная сила и тяга роторов напрямую зависят от диаметра и длины роторов, а также от скорости его вращения и набегающего потока воздуха.
Высокие эксплуатационные характеристики летательного аппарата такого типа проявляются в определенных диапазонах скоростей, при определенном соотношении к скорости набегающего потока воздуха. Для создания необходимого эффекта угловая скорость ротора должна превышать скорость набегающего потока воздуха примерно в 4 раза [В.И. Меркулов. «Гидродинамика знакомая и незнакомая». Москва «Наука», 1989 г, стр. 56].
Вращающиеся роторы во время движения не только увеличивают подъемную и тяговую силы, но также компенсируют за счет гироскопического эффекта опрокидывающий момент при порывах ветра и снижении подъемной силы крыла при движении с малой поступательной скоростью, а также делают аппарат в полете менее зависимым от угла атаки крыла и способствуют поддержанию устойчивого полета как в зоне действия экрана, так и на большой высоте.
Кроме того, за счет большой поверхности, ометаемой роторами, и всасывающего эффекта возникает существенный прирост массы перебрасываемого воздуха, в результате чего повышается подъемная сила крыла и усиливается тяга, а экранолету для поддержания в воздухе потребуется двигатель много меньшей мощности, и она при этом будет максимально преобразовываться в полезную работу.
Во время старта давление под корпусом экранолета повышается с набором определенной скорости, высоты и возникновения «воздушной подушки» экрана, а чем меньше та скорость, при которой возникает эффект экрана, тем меньше сопротивление воздуха и значит меньше будет расход мощности, поскольку расходуемая мощность, необходимая для движения, пропорциональна кубу скорости [В.И. Меркулов, Гидродинамика знакомая и незнакомая, стр. 57].
Такой многофакторный способ создания подъемной силы позволит существенно повысить летные характеристики летательного аппарата.
Поскольку лопасти роторов в нижнем положении защищены в каналах от встречного потока воздуха, то они и не подтормаживаются, а в верхнем положении лопасти вращаются по встречному потоку (назад) и лишь только подгоняют его, поскольку направление струи воздуха и вращения роторов совпадает, причем с ростом скорости потока повышается темп вращения, и увеличивается тяга, а индуктивное сопротивление уменьшается, ввиду чего энергетические затраты на вращение роторов будут невелики. [В.И. Меркулов «Гидродинамика знакомая и незнакомая», стр. 73]. Таким образом, относительно объемные аэродинамические формы крыла и роторов, порождающие определенное лобовое сопротивление воздуха, нивелируются, хотя для небольшого летательного аппарата, движущегося преимущественно на невысокой скорости, это сопротивление отнюдь не много значимо. Отсюда можно сделать вывод, что комбинированный способ использования обычного крыла и роторного вполне может найти применение в авиационной технике.
В горизонтальном полете на высоте роторы турбин при необходимости могут быть отключены от двигателей и вращаться в режиме авторотации. Тягу в этом случае будет обеспечивать воздушный винт, а подъемную силу - крылья.
Управление экранолетом по тангажу осуществляется традиционно перекладкой горизонтальных воздушных рулей, а изменение направления в горизонтальной плоскости - вертикальными аэродинамическими рулями и дифференциальными закрылками - элеронами. Кроме того, в данной конструкции имеется возможность осуществлять повороты по курсу не только с креном, но еще и дифференцированием тяги, создаваемой роторами, увеличивая или уменьшая обороты соответствующих электродвигателей, создавая, таким образом, различную подъемную силу и тягу, что немаловажно при движении на сверхмалой высоте и скорости, и существенно повышает маневренность и управляемость.
В данном проекте имеется возможность совершенствования и модификации конструкции, поэтому экранолет может иметь множество других вариантов воплощения. Например, для управления режимом работы роторной установки на передней кромке каналов дополнительно могут быть применены управляемые предкрылки. В целях же повышения устойчивости и управляемости аппарата в поперечном направлении законцовки верхнего крыла могут быть поворотными и выполнять функции элеронов. Воздушный винт для более эффективного управления вектором тяги может быть дополнительно оснащен такими средствами отклонения струи воздуха, как подвижные шторки, устанавливаемые за пропеллером, либо вся винтомоторная группа может быть цельноповоротной, что обеспечит не только надежное путевое управление, но и будет парировать крутящий момент винта. Все это повысит эффективность работы воздушного винта и придаст аппарату качественно иной уровень маневренности по крену и тангажу на любых скоростях движения.
В целях сокращения дистанции пробега экранолета при посадке привод воздушного винта может быть выполнен с возможностью реверсивного управления либо его лопастями, либо самим электродвигателем, поскольку электромотор легко заставить вращаться в противоположную сторону.
Применение гибридной двигательной установки (электрической передачи от ДВС) позволяет осуществить различные варианты компоновки. Например, привод на роторы может быть электрическим, а на воздушный винт - непосредственно от ДВС через редуктор или длинный вал.
Автоматизация управления механизмами летательного аппарата с помощью компьютерных схем существенно облегчит нагрузку на пилота.
Таким образом, в данной конструкции в результате гармоничного сочетания экранного планирования с принудительной циркуляцией воздуха над крылом, осуществляемой на основе гибридной силовой установки, летательному аппарату обеспечивается возможность создавать подъемную силу не только за счет скоростного напора воздуха, как у традиционных летательных аппаратов, но и генерировать ее на крыле-корпусе независимо от скоростного процесса, что повышает коэффициент подъемной силы и устойчивость аппарата, обеспечивает надежную стабилизацию, высокую скороподъемность и управляемость, а как результат - более широкое многофункциональное использование аппарата как в пределах аэродинамического экрана, так и в самолетном режиме, на что и направлено предлагаемое техническое решение.
Несмотря на некоторые потери мощности от преобразований энергии на борту экранолета, гибридизация силовой установки имеет решающее значение и диктуется существенными летными и техническими преимуществами:
- возможность широкой автоматизации и радиоуправления с земли;
- удобное и быстрое управление по проводам, обеспечивающее необходимое изменение режима работы движителей и делающее полет более комфортным и безопасным;
- улучшение маневренных качеств аппарата;
- требуется гораздо меньшая дистанция для взлета и посадки;
- способность стабильного движения на невысокой горизонтальной скорости и на больших углах атаки;
- возможность наиболее целесообразного размещения оборудования и улучшения планировки всех элементов аппарата;
- возможность применения силовой установки с более дешевым автомобильным двигателем и его штатной системой шумоглушения;
- снижение уровня шума, а также эмиссии токсичных и загрязняющих веществ;
- снижение эксплуатационных расходов за счет повышенного ресурса ДВС и возможного размещения на крыльях солнечных батарей.
К достоинствам гибридной двигательной установки на экранолете можно добавить также высокую энергоэффективность (КПД электродвигателей бывает до 95%); хорошую приемистость, возможность автоматического контроля и синхронизации работы всех структур для поддержания нужных параметров полета. Имеющее место некоторое утяжеление аппарата в результате гибридизации двигательной установки компенсируется повышенной выработкой подъемной силы на крыле и удобством управления.
Все это в совокупности придает экранолету новые потребительские и эксплуатационные качества, оптимальные летные характеристики, повышает надежность и безаварийность эксплуатации летательного аппарата, снижает эксплуатационные расходы, что служит обоснованием перспективности и рентабельности новой концепции экранолета.
Таким образом, заявляемый экранолет отличается от аналога значительно большей функциональностью и определенной новизной, а именно: интегральной аэродинамической схемой, улучшающей несущие свойства летательного аппарата, планирование, а также компоновкой нетрадиционной для экранолетов, более работоспособной и удобной гибридной силовой установкой, способной обеспечить аппарату уверенный крейсерский полет с постоянной скоростью и наименьшим расходом топлива, легкую управляемость и взаимодействие всех систем и агрегатов аппарата, в том числе точную синхронизацию роторов, а также поддерживать безопасную высоту и скорость на всех режимах полета.
Реферат
Полезная модель относится к классу воздушных судов малой авиации, движущихся в том числе на динамической воздушной подушке с использованием экранного эффекта, возникающего в результате близости опорной поверхности, и касается конструирования экранолета с гибридной силовой установкой.Гибридный экранолет выполнен по аэродинамической схеме «летающее крыло» и содержит несущее крыло-корпус с верхней выпуклой поверхностью, фюзеляж, органы управления, силовую установку и движительную установку с воздушными роторами, над корпусом установлено дополнительное верхнее крыло, а в задней части корпуса установлен дополнительный движитель - воздушный винт, силовая установка выполнена гибридной на основе электродвигателя и двигателя внутреннего сгорания, которые в совокупности с движителями работают как единый энергетический комплекс, обеспечивающий подъемную силу и силу тяги.
Комментарии