Способ и устройство управления силовым агрегатом транспортного средства - RU2267631C2
Код документа: RU2267631C2
Чертежи
Описание
Настоящее изобретение относится к способу и устройству управления силовым агрегатом транспортного средства.
В современных системах управления, которыми оснащают транспортные средства, на предусмотренные конструкцией транспортного средства исполнительные органы (например силовые агрегаты, коробки передач и т.п.) от различных систем подаются управляющие воздействия, которые иногда могут противоречить друг другу. Так, например, управление работой силового агрегата транспортного средства должно осуществляться на основании задаваемого водителем режима движения, а также на основании различных заданных значений, задаваемых внешними и/или внутренними системами регулирования и управления, такими, например, как противобуксовочная система, система регулирования тягового момента, развиваемого двигателем, система управления коробкой передач, система ограничения частоты вращения вала двигателя и/или скорости движения автомобиля и/или система регулирования частоты вращения при холостом ходе. Формируемые на основании этих заданных значений управляющие воздействия иногда носят взаимоисключающий характер, и поэтому такие заданные значения, поскольку какой-либо рабочий параметр силового агрегата может устанавливаться только на одно из них, необходимо соответствующим образом согласовывать или координировать, т.е. выбирать только одно заданное значение, на которое должен установиться рабочий параметр силового агрегата.
Применительно к управлению силовым агрегатом транспортного средства указанное выше согласование различных заданных значений крутящего момента известно из заявки DE 19739567 А1. Согласно этой заявке путем выбора максимального и/или минимального значения из нескольких заданных значений крутящего момента определяется то заданное значение, на которое рабочий параметр должен установиться в текущем рабочем режиме путем задания величин отдельных регулируемых параметров силового агрегата, которыми для двигателя внутреннего сгорания (ДВС) являются, например, степень наполнения цилиндров, угол опережения зажигания и/или количество впрыскиваемого топлива. При этом с заданными значениями могут быть связаны различные свойства или качественные параметры, которые, например, характеризуют необходимую динамику изменения фактического значения в сторону заданного значения, присвоенный заданному значению приоритет и т.д. и которые равным образом могут носить взаимоисключающий характер и не учитываются в известном способе согласования заданных значений.
Для учета подобных свойств в заявке DE 19961291.9, поданной 18.12.1999, было предложено также подвергать согласованию с помощью координатора относящиеся к конкретным заданным значениям свойства путем их сравнения между собой с получением результирующего вектора свойств и затем на его основании регулировать регулируемые параметры силового агрегата.
В соответствии с этим известным техническим решением заданные значения крутящего момента соответствующим образом компонуются в зависимости от их воздействия по критерию выбора максимального и минимального значений и после этого подвергаются раздельному согласованию для медленнодействующего управляющего тракта (управляющего наполнением цилиндров тракта) и быстродействующего управляющего тракта (управляющего опережением зажигания тракта). Для практической реализации подобного подхода требуется сравнительно сложная по своей структуре система, интерфейсы которой необходимо специально согласовывать с каждым конкретным типом силового агрегата (например, с ДВС с принудительным воспламенением рабочей смеси).
Для решения этой задачи в изобретении предлагается способ управления силовым агрегатом транспортного средства, имеющим по меньшей мере один регулируемый параметр, который регулируют в зависимости по меньшей мере от одного заданного значения некоторого выходного параметра силового агрегата, которое выбирают из нескольких заданных значений. В соответствии с изобретением предлагается на первой стадии использовать заданные значения, не зависящие от силового агрегата, для формирования первого заданного значения, а на второй стадии - на основании этого первого заданного значения и по меньшей мере одного зависящего от двигателя заданного значения формировать второе заданное значение, влияющее на указанный по меньшей мере один регулируемый параметр.
В качестве выходного параметра силового агрегата предпочтительно использовать развиваемый им крутящий момент.
Первое заданное значение может формироваться в первом координаторе в зависимости от задаваемого водителем заданного значения, от задаваемого регулятором скорости движения значения, от задаваемого системой регулирования динамики транспортного средства значения, от задаваемого регулятором развиваемого двигателем тягового момента значения, от задаваемого противобуксовочной системой значения и/или от задаваемого системой ограничения максимальной скорости движения значения. При этом заданным значением может быть заданное значение крутящего момента на ведущих колесах, которое пересчитывают в заданное значение крутящего момента на выходном валу силового агрегата с учетом преобладающих в трансмиссии условий.
Дополнительно к первому координатору может быть предусмотрен второй координатор, формирующий второе заданное значение на основании первого заданного значения и по меньшей мере одного зависящего от двигателя заданного значения. При этом выходная величина второго координатора может пересчитываться во внутреннее заданное значение крутящего момента с учетом возникающих в силовом агрегате потерь крутящего момента.
Каждому заданному значению может быть поставлен в соответствие по меньшей мере один качественный параметр, который содержит по меньшей мере информацию о требуемом времени установки на соответствующее заданное значение. При этом на основании качественных параметров, относящихся к различным заданным значениям, в первом и втором координаторах может формироваться по меньшей мере один результирующий качественный параметр. С учетом этого результирующего качественного параметра второе заданное значение может преобразовываться в преобразователе в управляющие воздействия, выдаваемые в управляющие регулированием регулируемых параметров силового агрегата тракты.
Дополнительно может определяться прогнозируемое заданное значение, которое по меньшей мере в одном режиме работы соответствует не подвергнутому фильтрации задаваемому водителем значению, в зависимости от которого регулируют работу силового агрегата по меньшей мере в одном из режимов работы.
Объектом изобретения является также устройство управления силовым агрегатом транспортного средства, имеющее по меньшей мере один блок управления по меньшей мере с одним микрокомпьютером, который для управления силовым агрегатом позволяет выдавать в зависимости по меньшей мере от одного заданного значения выходного параметра силового агрегата по меньшей мере одно управляющее воздействие на изменение регулируемого параметра.
В одном варианте предлагаемое в изобретении устройство имеет первую часть, содержащую не зависящие от двигателя программы и взаимодействующую через заданный интерфейс со второй его частью, содержащей зависящие от двигателя программы. При этом первая часть позволяет выдавать в этот интерфейс заданные величины и параметры и принимать от зависящей от двигателя части заданные величины и параметры.
Во втором варианте предлагаемое в изобретении устройство имеет часть, содержащую зависящие от двигателя программы и взаимодействующую через заданный интерфейс с частью, содержащей не зависящие от двигателя программы. При этом зависящая от двигателя часть позволяет выдавать в указанный интерфейс заданные величины и параметры и принимать от не зависящей от двигателя части заданные величины и параметры.
В различных частных вариантах реализации предлагаемого в изобретении устройства выдаваемыми не зависящей от двигателя частью величинами и параметрами могут быть заданное значение крутящего момента, прогнозируемое значение крутящего момента, заданное время установки на заданное значение, значение крутящего момента, необходимого для работы дополнительных потребителей, по меньшей мере одно значение, характеризующее степень нажатия на педаль акселератора, педаль тормоза и педаль сцепления, информация касательно комфортабельности при управлении и/или заданные минимальное, и/или максимальное значения частоты вращения, и/или по меньшей мере одно информационное сообщение о режиме работы, соответственно о типе коробки передач и/или информация о положении ключа зажигания и/или не зависящие от режима работы двигателя измеряемые параметры, а выдаваемыми зависящей от двигателя части величинами и параметрами являются значение фактического крутящего момента, максимально и/или минимально достижимые в динамическом режиме значения крутящего момента, максимальное и/или минимальное значения крутящего момента в стационарном режиме, максимальное и/или минимальное значения крутящего момента в оптимальных условиях, значение поправки, вносимой в значение крутящего момента, необходимого для обеспечения работы дополнительных потребителей, информация, указывающая на работу двигателя, зависящие от режима работы двигателя измеряемые параметры, такие как частота вращения вала двигателя и/или температура двигателя, максимальная частота вращения и/или минимальная частоты вращения и/или информация об отключении режима принудительного холостого хода и/или величины, выдаваемые интегральной составляющей регулятора частоты вращения при холостом ходе.
Раздельное согласование между собой внешних и внутренних входных воздействий, т.е. входных воздействий, поступающих от внешних и внутренних систем и функций, позволяет выделить в системе управления крутящим моментом не зависящую от конкретного типа силового агрегата часть, которая в равной степени пригодна для использования применительно к силовым агрегатам практически всех типов, например применительно к дизельным и бензиновыми двигателям, а также электродвигателям. При этом к конкретному типу силового агрегата необходимо адаптировать только координатор внутренних величин, т.е. характерных для конкретного типа силового агрегата величин.
В результате, в чем состоит особое преимущество, появляется возможность использовать во всех системах управления унифицированный интерфейс и сделать структуру таких систем управления более наглядной ("прозрачной").
Помимо этого раздельное преобразование полученных в результате согласования значения крутящего момента и вектора свойств в управляющие воздействия, направленные на изменение соответствующих регулируемых параметров силового агрегата, позволяет осуществлять подобное преобразование заданного значения крутящего момента в управляющее воздействие вне зависимости от источника запроса на изменение крутящего момента, что предоставляет дополнительную степень свободы. Так, например, конкретный источник запроса на изменение регулируемого параметра не играет решающей роли при выборе того или иного пути отработки заданного значения (например, изменением угла опережения зажигания). Иными словами, выбор подобного пути отработки заданного значения определяется с учетом фактических свойств вне зависимости от источника запроса на изменение регулируемого параметра.
Задание определенных, выбираемых с учетом оптимизации системы управления двигателем, ее структуры и интерфейса величин и параметров, передаваемых от не зависящей от двигателя части системы управления в ее зависящую от двигателя часть и/или наоборот, т.е. использование величин и параметров, выдаваемых каждой из указанных частей системы управления, для описания интерфейса, обеспечивающего взаимодействие между обеими этими частями системы управления, позволяет дополнительно оптимизировать и упростить структуру системы управления и взаимодействие между ее частями. Помимо этого эффективное взаимодействие между обеими частями системы управления обеспечивается даже при независимой разработке каждой из них.
Другие преимущества изобретения представлены в последующем описании вариантов его осуществления.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - общая схема устройства управления силовым агрегатом,
на фиг.2 - функциональная схема, поясняющая общую структуру системы регулирования крутящего момента, более подробно рассмотренной на примере показанной на фиг.3 функциональной схемы, и
на фиг.4 и 5 - предпочтительный вариант выполнения интерфейса, обеспечивающего взаимодействие между зависящей и не зависящей от двигателя частями системы управления с указанием величин и параметров, выдаваемых каждой из этих частей.
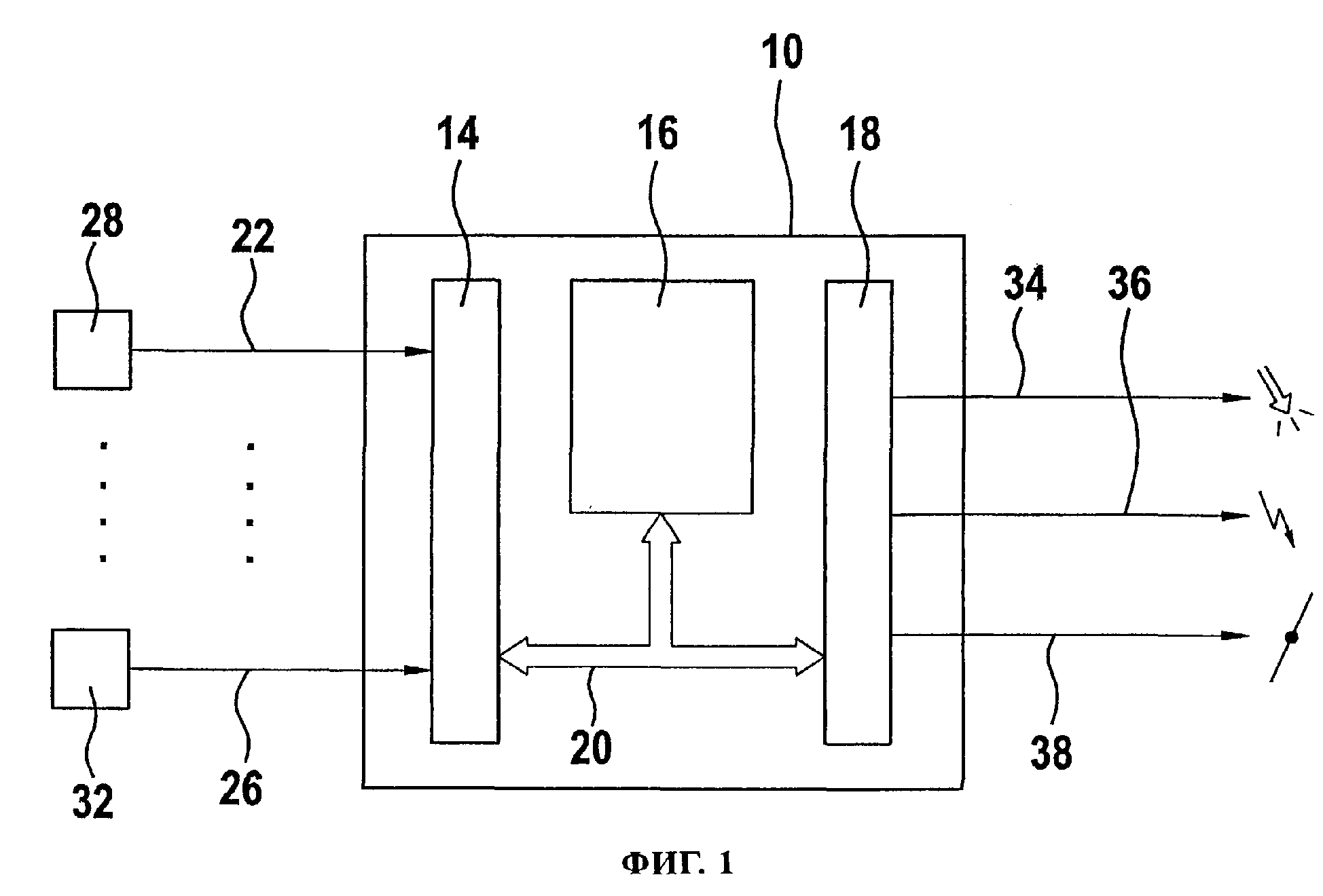
На фиг.1 схематично изображено устройство управления силовым агрегатом, прежде всего двигателем внутреннего сгорания (ДВС). Это устройство имеет блок 10 управления, в состав которого входят входной контур 14, по меньшей мере один процессор 16 и выходной контур 18. Эти компоненты соединены между собой системой 20 связи, предназначенной для взаимного обмена данными между ними. Ко входному контуру 14 блока 10 управления подведены входные линии 22-26, которые в предпочтительном варианте выполнены в виде шинной системы и по которым в блок 10 управления поступают различные сигналы, которые характеризуют различные рабочие параметры, подвергаемые необходимой для управления силовым агрегатом обработке. Эти сигналы поступают от различных измерительных устройств 28-32. Указанными рабочими параметрами являются положение педали акселератора, частота вращения вала двигателя, нагрузка двигателя, состав отработавших газов (ОГ), температура двигателя и иные величины. С помощью выходного контура 18 блок 10 управления управляет развиваемой силовым агрегатом мощностью. Для этой цели предусмотрены условно показанные на фиг.1 выходные линии 34, 36 и 38, предназначенные для управления такими параметрами, как количество впрыскиваемого топлива и угол опережения зажигания (момент зажигания) в системе зажигания ДВС, а также положением по меньшей мере одной дроссельной заслонки с электроприводом, предназначенной для регулирования количества подаваемого в ДВС воздуха. Помимо описанных выше входных величин во входной контур 14 поступают и иные входные величины от других систем управления транспортным средством и, в частности, различные заданные значения, например заданное значение крутящего момента. В качестве примера таких систем управления можно назвать противобуксовочные системы, системы регулирования динамики автомобиля, системы управления коробкой передач, системы регулирования тягового момента, развиваемого двигателем, регуляторы скорости, ограничители скорости движения автомобиля и иные системы. По представленным на чертеже регулирующим или управляющим трактам (т.е. трактам управления различными исполнительными органами, регулирующими соответствующие регулируемые параметры) регулируется подача воздуха в ДВС, момент зажигания в отдельных цилиндрах, количество впрыскиваемого топлива, начало впрыскивания и/или соотношение между воздухом и топливом в горючей смеси и иные параметры. Наряду с описанными выше заданными величинами, так называемыми внешними задаваемыми величинами, к которым относится также задаваемое водителем воздействие в виде задаваемого им режима движения и ограничение максимальной скорости движения автомобиля, для управления силовым агрегатом используются также внутренние заданные величины, например изменение крутящего момента системой регулирования частоты вращения при холостом ходе, ограничение частоты вращения, при котором выдается соответствующее заданное значение, ограничение крутящего момента и т.д.
С отдельными задаваемыми величинами связаны соответствующие граничные условия или свойства, соответственно качества, определяющие характер преобразования этих задаваемых величин в управляющие воздействия. При этом в зависимости от конкретного применения с одной задаваемой величиной могут быть связаны одно или несколько таких свойств, и поэтому под термином "свойства" или "качества" в одном из предпочтительных вариантов понимается вектор свойств или качеств, который содержит различные качественные или характеризующие конкретные свойства параметры. К свойствам заданных или задаваемых значений относятся, например, необходимая динамика изменения фактического значения в сторону заданного значения, присвоенный заданному значению приоритет, величина устанавливаемого запаса крутящего момента и/или степень комфортабельности езды при регулировании (например, ограничение скорости изменения того или иного рабочего параметра). В одном из предпочтительных вариантов присутствуют все указанные свойства. В других вариантах может присутствовать только одно такое свойство или несколько из них.
Рассматриваемый в описании подход можно использовать не только применительно к ДВС, но и применительно к концептуально иным приводным и силовым агрегатам, например применительно к электродвигателям. В этом случае необходимо соответствующее согласование управляющих воздействий и регулируемых величин.
В качестве задаваемой величины (заданного значения) в одном из предпочтительных вариантов предлагается использовать величину крутящего момента, развиваемого силовым агрегатом. В других вариантах в качестве задаваемых величин можно использовать при соответствующем согласовании иные относящиеся к выходным параметрам силового агрегата величины, такие как мощность, частота вращения и т.п.
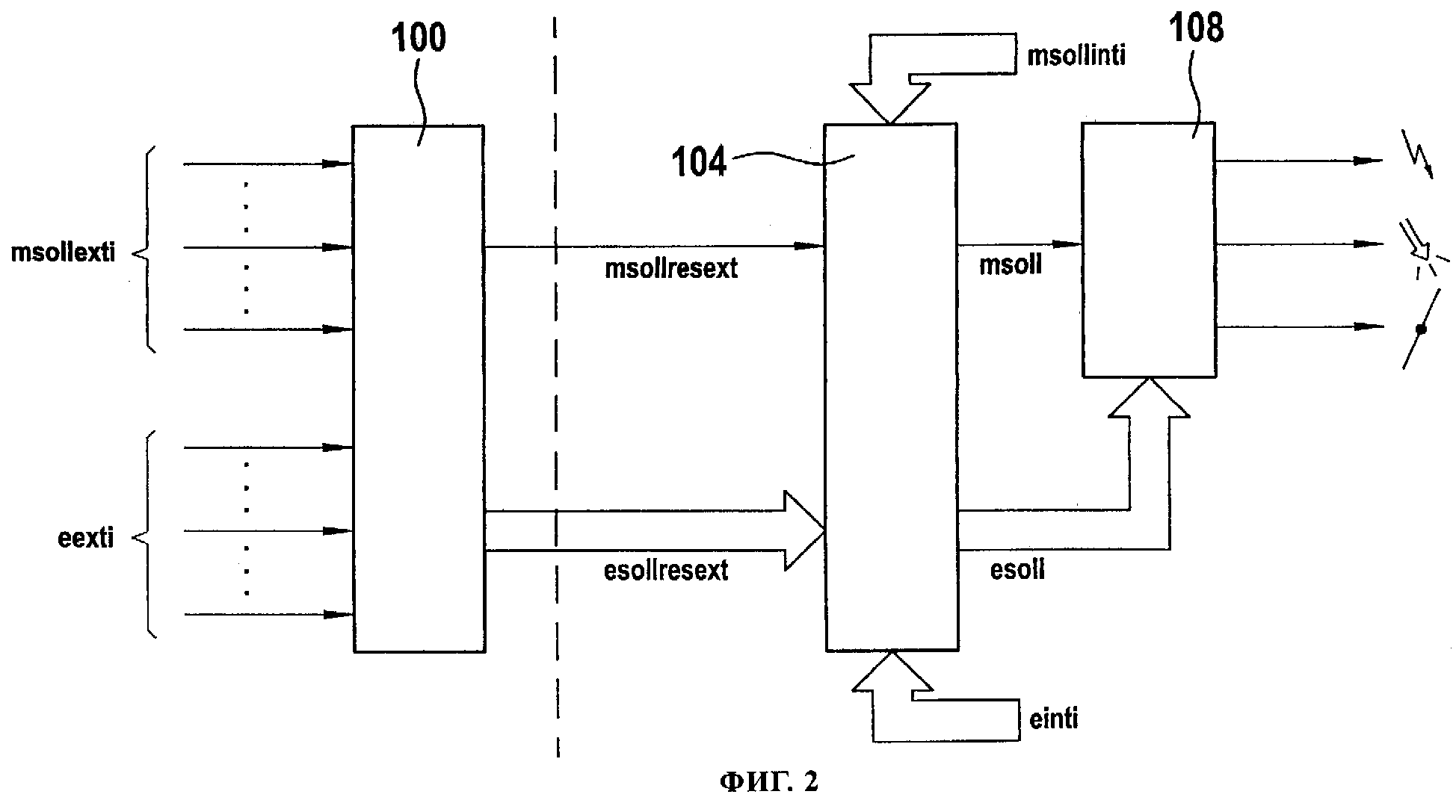
На фиг.2 показана блок-схема выполняемой процессором 16 программы управления работой двигателя, при этом согласование внешних и согласование внутренних величин осуществляются независимо друг от друга, а также независимо от преобразования результирующих заданных значений и результирующих качественных параметров в управляющие работой силового агрегата воздействия.
Показанные на фиг.2, а также на фиг.3 элементы соответствуют отдельным программам, шагам или частям программ, а соединительные линии между этими элементами соответствуют потокам информации.
В показанном на фиг.2 примере предусмотрен первый координатор 100 для согласования заданных значений крутящего момента от внешних систем (внешних заданных значений) вместе с качественными параметрами, характеризующими свойства таких заданных значений. В этот координатор 100 поступают внешние заданные значения msollexti и относящее(-иеся) к ним свойство(-а) eexti. В одном из вариантов эти заданные значения сравниваются между собой, например, с целью выбора из них минимального и максимального значений. В качестве результата подобного согласования значений в этом координаторе на дальнейшую обработку выдается результирующее заданное значение крутящего момента msollresext и соответствующее(-ие) ему свойство(-а) esollresext. В других вариантах для согласования в координаторе можно использовать, например, некоторое, выбираемое по соответствующему критерию свойство (например, время установки на заданное значение) и затем для формирования результирующего значения логически комбинировать между собой заданные значения или полученные на их основании величины. При этом внешними заданными значениями являются не зависящие от двигателя или силового агрегата входные величины или входные воздействия, такие как заданный крутящий момент, задаваемый водителем, регулятором скорости движения или адаптивным регулятором скорости движения (системой адаптивного круиз-контроля), системой ограничения скорости движения, системой поддержания курсовой устойчивости автомобиля при его движении, системой регулирования тягового момента, развиваемого двигателем, и/или противобуксовочной системой. Эти не зависящие от двигателя заданные величины, которые следует отнести к отбору мощности, представляют собой значения крутящего момента на выходном конце вала отбора мощности, соответственно на выходном (вторичном) валу коробки передач и согласуются на этом уровне. К этому же уровню относятся и функции по обеспечению комфортабельности езды, такие как функция по предупреждению скачкообразного изменения нагрузки двигателя или функция по демпфированию дроссельной заслонки. Другие не зависящие от двигателя величины относятся к тяге (крутящему моменту на ведущих колесах). К таким величинам относятся заданные значения крутящего момента, выдаваемые системой управления коробкой передач и способствующие переключению передач, а также предельное значение крутящего момента для защиты деталей коробки передач от выхода из строя и/или значения крутящего момента, необходимого для работы дополнительных агрегатов, таких как генератор, компрессор кондиционера и иного оборудования. Указанные величины также являются внешними (не зависящими от двигателя) входными воздействиями и поэтому подаются на согласование в координатор 100. Эти величины характеризуют значение крутящего момента на выходном валу коробки передач, соответственно на выходном валу двигателя, которое является также выходной величиной координатора 100. При пересчете значений крутящего момента учитываются потери в трансмиссии/преобразователе крутящего момента, вносимое трансмиссией усиление и иные факторы.
Сказанное, как указывалось выше, относится и к свойствам или качественным параметрам eexti внешних величин. При этом каждой из вышеуказанных заданных величин поставлено в соответствие по меньшей мере одно определенное свойство или качество, например определенное время установки на эту заданную величину, на основании которого или которых в координаторе 100 аналогично согласованию заданных значений крутящего момента формируется вектор свойств esollersext. В соответствии с одним из вариантов этот вектор свойств может содержать также информацию о текущем режиме работы (например, информацию, свидетельствующую об отпущенной педали акселератора), а также о заданных извне предельных значениях. Выходные значения координатора 100, полученные в результате согласования соответствующих внешних величин, подаются далее в координатор 104, в котором результирующие внешние величины согласуются с внутренними, т.е. зависящими от двигателя, величинами. Между координаторами 100 и 104 имеется интерфейс, обеспечивающий сопряжение между зависящей и не зависящей от двигателя частями системы управления.
В координатор 104 поступают внутренние заданные величины msollinti, соответственно einti. К зависящим от двигателя величинам относятся прежде всего заданные значения, задаваемые внутренними функциями по ограничению крутящего момента, вводимому для защиты узлов и деталей от их интенсивного износа и выхода из строя или для предотвращения обеднения горючей смеси при полной нагрузке, заданное значение для максимально допустимой частоты вращения и иные величины. Кроме того, при расчетах заданного значения момента учитываются не показанные на фиг.2 корректировочные значения (поправки), поступающие от регуляторов частоты вращения, регулятора, предотвращающего остановку двигателя, регулятора частоты вращения при холостом ходе, а также учитываются возникающие в двигателе потери, значения тягового момента и связанные непосредственно с работой двигателя функции по обеспечению комфортабельности езды. Выходными величинами координатора 104 являются внутреннее заданное значение крутящего момента, на которое должен установиться развиваемый двигателем крутящий момент, т.е. заданное значение крутящего момента msoll, развиваемого двигателем в результате сгорания рабочей смеси, а также относящийся к этому заданному значению вектор свойств esoll.
Выдаваемые координатором 104 результирующие величины поступают в зависящий от двигателя преобразователь 108, в котором результирующие значения требуемого крутящего момента (внутреннее заданное значение крутящего момента и вектор свойств) преобразуются в заданные значения или управляющие воздействия для определяемых конкретным типом двигателя управляющих трактов. В случае бензинового двигателя такими заданными значениями являются, например, заданные значения для степени наполнения воздухом цилиндров ДВС, для угла опережения зажигания и/или для параметров впрыскивания топлива, в случае дизельного двигателя ими являются, например, количество впрыскиваемого топлива, а в случае электродвигателя - например, параметры электрического тока. При этом учитываются текущая рабочая точка, т.е. текущий режим работы, двигателя и иные граничные условия, влияющие на различные управляющие тракты. Преобразование заданного значения крутящего момента и вектора свойств в управляющие воздействия для различных управляющих трактов осуществляется, например, по методике, рассмотренной в указанном в начале описания уровне техники, при этом выбирается тот управляющий тракт, с помощью которого крутящий момент можно установить на требуемое значение за необходимый интервал времени. Кроме того, некоторые из выдаваемых преобразователем 108 управляющих воздействий непосредственно подаются в соответствующие управляющие тракты, например воздействие на угол опережения зажигания со стороны регулятора, предотвращающего "рывки" или "дерганье" автомобиля при скачкообразном изменении крутящего момента, воздействие, направленное на дополнительное наполнение цилиндров ДВС для поддержания необходимого запаса крутящего момента на холостом ходу, и иные аналогичные воздействия.
В соответствии с приведенным выше описанием свойства или качества, характеризующие заданные значения, объединяются в соответствующий вектор е. В зависимости от конкретного варианта этот вектор может содержать различные величины. В одном из предпочтительных вариантов, который более подробно рассмотрен ниже со ссылкой на фиг.3, такой вектор свойств содержит по меньшей мере предсказанное или прогнозируемое значение крутящего момента, которое в обычном случае соответствует не подвергнутому фильтрации задаваемому водителем крутящему моменту, но может корректироваться с учетом других воздействий, прежде всего воздействий, при которых требуется создание определенного запаса крутящего момента. Кроме того, этот вектор свойств содержит информацию о соответствующем каждому заданному значению крутящего момента времени установки на него, а также информацию о режиме движения автомобиля, например информацию о его динамике, заданные предельные значения частоты вращения вала двигателя, биты, указывающие на активизированное/деактивизированное состояние функции по предупреждению скачкообразного изменения нагрузки или функции по демпфированию дроссельной заслонки, биты, указывающие на работу двигателя в режиме холостого хода, а также настройки, определяющие комфортабельность езды, и иную информацию.
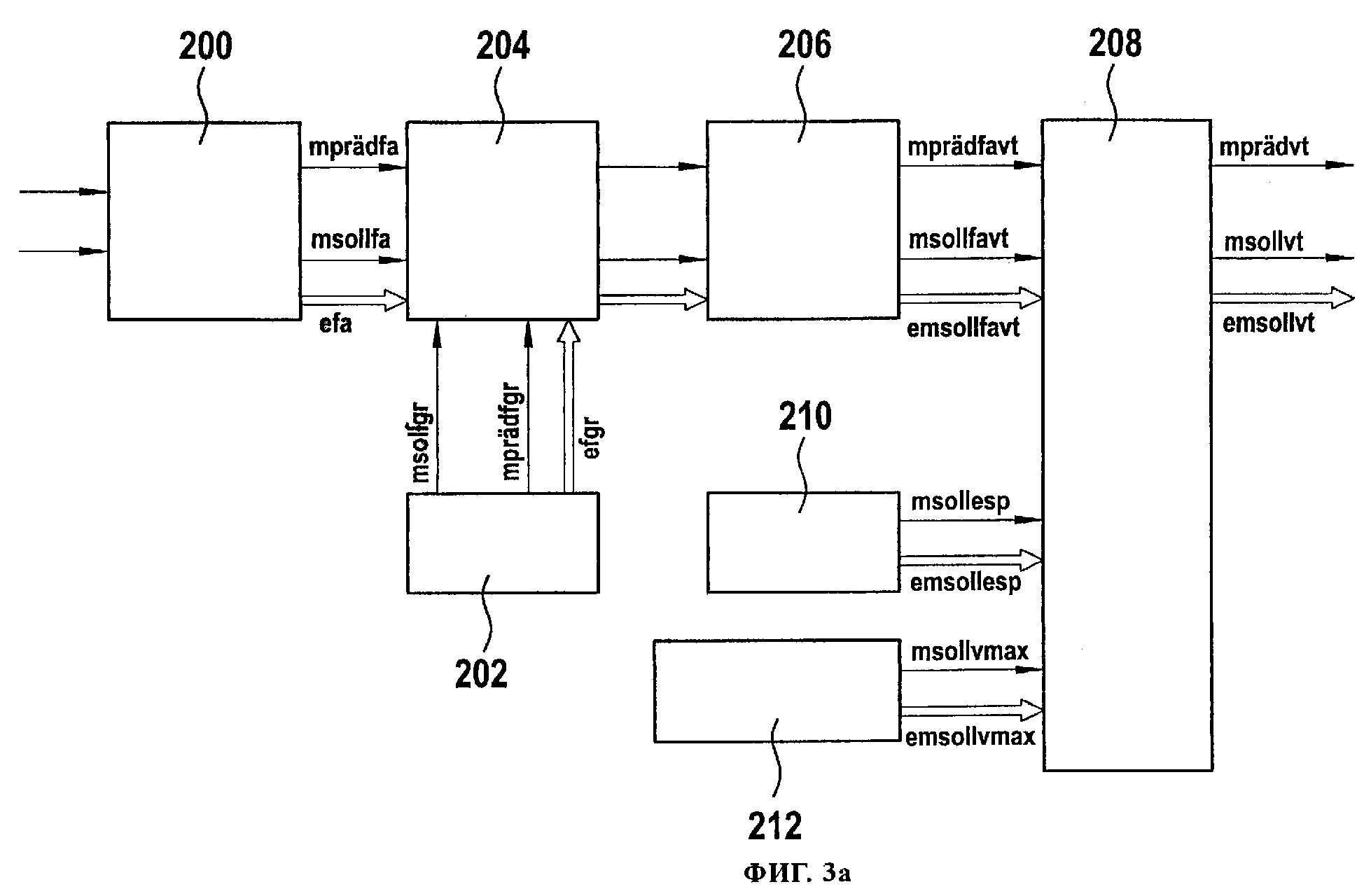
На фиг.3 показана функциональная схема, поясняющая предпочтительный вариант выполнения рассмотренной выше системы управления или регулирования крутящего момента. При этом на фиг.3а и 3б показан предпочтительный вариант выполнения координатора 100, а на фиг.3в и 3г представлены предпочтительные варианты выполнения координатора 104 и преобразователя 108 соответственно. Изображенные на этих чертежах отдельные элементы также условно соответствуют отдельным программам, частям или шагам программы, выполняемой микрокомпьютером (процессором) 16 блока управления, а соединительные линии соответствуют потокам информации.
Сначала в блоке 200, например по многопараметровой характеристике, на основании, например, частоты вращения вала двигателя и степени нажатия водителем на педаль акселератора определяется значение задаваемого водителем крутящего момента. Это значение задаваемого водителем крутящего момента msollfa представляет собой значение, на которое должен установиться крутящий момент на ведущих колесах (тяговый крутящий момент). Соответствующим образом определяется прогнозируемое значение задаваемого водителем крутящего момента mprädfa, которое согласно предпочтительному варианту сначала соответствует задаваемому водителем крутящему моменту, а затем принимает значение, на которое в будущем с определенной долей вероятности должен установиться фактический крутящий момент. Этому задаваемому водителем крутящему моменту поставлено в соответствие по меньшей мере одно свойство или качественный параметр efa, характеризующий, например, время установки регулируемого параметра на заданное значение, т.е. в данном случае время, за которое крутящий момент должен установиться на это задаваемое водителем значение крутящего момента, и/или степень нажатия на педаль акселератора. Это время установки на заданное значение определяется и выдается, например, в зависимости от скорости нажатия на педаль акселератора. Если автомобиль оснащен регулятором 202 скорости движения или адаптивным регулятором скорости движения, который дополнительно позволяет учитывать расстояние до впереди идущего транспортного средства, то таким регулятором формируется заданное значение крутящего момента msollfgr, прогнозируемое значение крутящего момента mprädfgr (которое может соответствовать заданному значению крутящего момента или достижимому в стационарном режиме значению крутящего момента) и относящиеся к этим заданным величинам качественные параметры efgr (время установки, включенное/отключенное состояние регулятора и т.д.). Величины, поступающие от блока 200 определения задаваемого водителем крутящего момента и от регулятора 202 скорости движения, подвергаются соответствующему согласованию в координаторе 204. Так, например, при включенном регуляторе скорости движения в этот координатор поступают заданное значение крутящего момента и прогнозируемое значение крутящего момента, определенное регулятором 202 скорости движения. Соответственно в этот координатор поступает также относящийся к этому значению крутящего момента вектор свойств, характеризующий, например, время установки на заданный крутящий момент. При отключенном регуляторе скорости движения поступающие в координатор 204 значения задаваемого водителем крутящего момента без каких-либо изменений непосредственно выдаются им на последующую обработку. Кроме того, значение задаваемого водителем крутящего момента вместе с его свойствами выдается этим координатором на последующую обработку и в том случае, когда это значение больше значения крутящего момента, задаваемого регулятором скорости движения. Результирующие величины с выхода координатора 204 поступают в блок 206, в виде которого условно представлены функции по обеспечению комфортабельности езды. Такими функциями могут являться, например, функции по предупреждению скачкообразного изменения нагрузки или функции по демпфированию дроссельной заслонки, в которых значение задаваемого водителем крутящего воздействия, соответственно задаваемое регулятором скорости движения значение крутящего момента подвергаются фильтрации во избежание скачкообразного изменения крутящего момента. Подобной фильтрации подвергается главным образом заданное значение крутящего момента, а не прогнозируемое значение крутящего момента. Соответствующим образом фильтрации могут подвергаться и качественные параметры (свойства), например определенный набор качественных параметров, в частности информация о времени установки на заданное значение. Результатом предварительного регулирования функций по обеспечению комфортабельности езды в блоке 206 являются заданное значение msollfavt крутящего момента на ведущих колесах, прогнозируемое значение mprädfavt крутящего момента на ведущих колесах, а также по меньшей мере одно относящееся к этим величинам свойство emsollfavt.
Указанные величины поступают далее в координатор 208, в который поступают также другие внешние входные воздействия, например от системы поддержания курсовой устойчивости автомобиля при его движении (системы ESP), от системы регулирования развиваемого двигателем тягового момента (системы MSR) и/или от противобуксовочной системы (от системы ASR) 210. Такая функция или такие функции, соответственно такая система или такие системы также выдают в координатор 208 заданное значение крутящего момента на ведущих колесах (например, заданное значение msollesp от системы ESP) и соответствующие ему свойства emsollesp, которые в предпочтительном варианте содержат информацию прежде всего о необходимом времени установки на такое заданное значение. В схеме предусмотрен также ограничитель 212 скорости движения, который в зависимости от величины, на которую скорость движения автомобиля превышает максимально допустимую скорость, выдает заданное значение крутящего момента на ведущих колесах msollvmax вместе с соответствующими ему свойствами emsollvmax. Все эти величины подвергаются в координаторе 208 соответствующему согласованию. При этом в координаторе, как описано выше, заданные значения крутящего момента и по меньшей мере одно свойство логически комбинируются между собой, тогда как прогнозируемое значение крутящего момента, представляющее собой значение, на которое предположительно должен установиться крутящий момент после исчезновения этих направленных на его понижение или повышение воздействий, не подвергается согласованию с заданными значениями крутящего момента, определяемым внешним входным воздействием. Вместе с тем при наличии, например, сохраняющихся в течение длительного промежутка времени воздействий, направленных на понижение регулируемой величины (в данном случае крутящего момента), на дальнейшую обработку может также выдаваться прогнозируемое значение крутящего момента, скорректированное с учетом соответствующего внешнего заданного значения крутящего момента. В простейшем случае заданные значения крутящего момента выбираются по критерию выбора максимального и минимального значений, а за результирующие свойства или качественные параметры принимается(-ются) соответствующее(-ие) такому выбранному заданному значению крутящего момента свойство(-а), а также при необходимости параметры состояния и заданные величины. Выходным значение координатора 208 являются, таким образом, прогнозируемое значение крутящего момента на ведущих колесах mprädvt, результирующее заданное значение крутящего момента на ведущих колесах msollvt, а также результирующие свойства emsollvt. С физической точки зрения этот крутящий момент соответствует моменту на выходном звене трансмиссии (кинематической цепи) автомобиля.
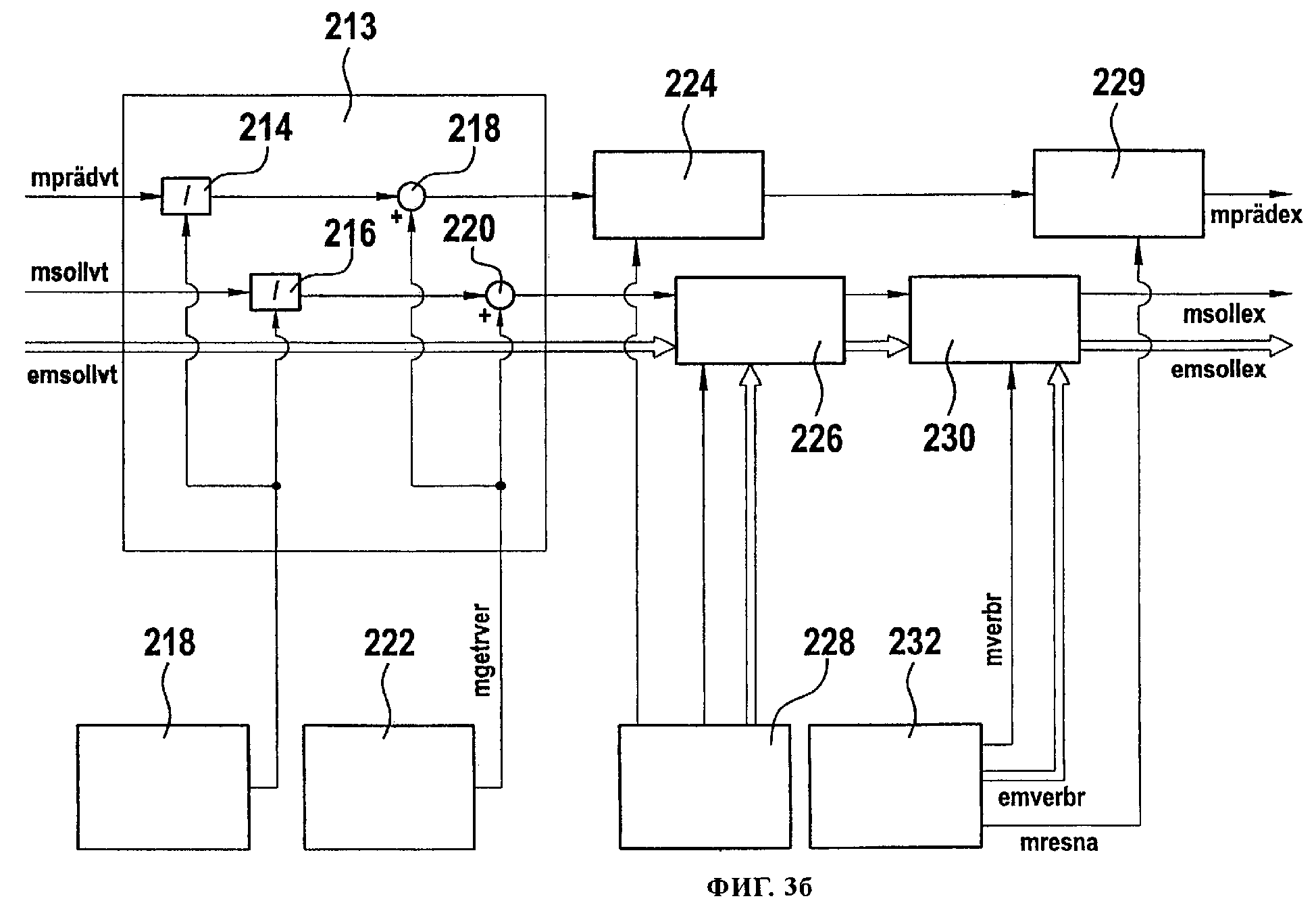
Для пересчета значений крутящего момента на ведущих колесах в значения крутящего момента на выходном (вторичном) валу коробки передач полученные величины, т.е. прогнозируемое значение крутящего момента на ведущих колесах и заданное значение крутящего момента на ведущих колесах, пересчитываются в блоке 213 в соответствии с показанной на фиг.3б функциональной схемой с учетом вносимого трансмиссией усиления, т.е. с учетом, например, постоянного, хранящегося в запоминающем элементе 218 коэффициента усиления на участке между выходным концом вала отбора мощности и коробкой передач, а также с учетом величины возникающих в коробке передач потерь крутящего момента mgetrver. Эта величина определяется в зависимости от текущего режима работы коробки передач, например, по многопараметровой характеристике 220. В результате подобного пересчета получают соответствующие значения крутящего момента на выходном (вторичном) валу коробки передач. При этом свойства при отсутствии значений крутящего момента на ведущих колесах пересчету не подвергаются. В одном из вариантов рассмотренный выше пересчет осуществляется в точках 214, соответственно 216 логического комбинирования, в каждой из которых заданные значения крутящего момента логически перемножаются с соответствующими величинами вносимого трансмиссией усиления. После этого сформированные таким путем заданное значение крутящего момента на выходном валу коробки передач и прогнозируемое значение крутящего момента на выходном валу коробки передач корректируются в точках 218, соответственно 220 логического комбинирования на величину возникающих в коробке передач потерь крутящего момента mgetrver. Эту величину возникающих в коробке передач потерь крутящего момента предпочтительно суммировать с прогнозируемым значением крутящего момента, соответственно с заданным значением крутящего момента на выходном валу коробки передач. Далее с учетом установленного передаточного числа коробки передач значения крутящего момента на выходном валу коробки передач пересчитываются в значения крутящего момента, передаваемого сцеплением.
Далее прогнозируемое значение крутящего момента и заданное значение крутящего момента, а также относящийся к нему вектор свойств поступают в координаторы 224, соответственно 226. В обоих этих координаторах учитываются параметры, относящиеся к коробке передач, т.е. величины, задаваемые системой управления коробкой передач для процесса переключения передач и/или задаваемые функцией по защите коробки передач от ее выхода из строя. Для защиты коробки передач от ее выхода из строя в блоке 228 задается максимальное значение для передаваемого сцеплением крутящего момента, которым ограничивается заданное значение крутящего момента, передаваемого сцеплением. При направленном на коробку передач воздействии задается определенная характеристика изменения передаваемого сцеплением крутящего момента, позволяющая оптимизировать процесс переключения передач. Заданное значение передаваемого сцеплением крутящего момента сравнивается в координаторе 226 с этими заданными значениями крутящего момента и на дальнейшую обработку согласно одному из вариантов в качестве заданного значения передаваемого сцеплением крутящего момента выдается наименьшее из значений. При этом прежде всего заданному значению крутящего момента для направленного на коробку передач воздействия ставится в соответствие по меньшей мере один качественный параметр, которым, например, определяется необходимое время установки на это заданное значение с целью обеспечить заданное изменение крутящего момента в процессе переключения передач. Этот качественный параметр подвергается согласованию по меньшей мере с одним соответствующим качественным параметром, относящимся к заданному значению крутящего момента, передаваемого сцеплением, при этом, например, непосредственно в процессе переключения передач приоритет имеет качественный параметр, относящийся к значению крутящего момента, заданному для направленного на коробку передач воздействия. Это значение крутящего момента, заданное для направленного на коробку передач воздействия, логически комбинируется в координаторе 224 с прогнозируемым значением крутящего момента, передаваемого сцеплением. В одном из вариантов на дальнейшую обработку выдается непосредственно прогнозируемое значение передаваемого сцеплением крутящего момента без внесения в него каких-либо изменений, тогда как в другом варианте прежде всего при наличии сохраняющихся в течение длительного промежутка времени воздействий это прогнозируемое значение крутящего момента корректируется с учетом значения крутящего момента, заданного для направленного на коробку передач воздействия.
Выходные величины координаторов 224, соответственно 226 поступают в координаторы 229, соответственно 230, в которых учитываются значения крутящего момента, необходимого для работы дополнительных агрегатов. Эти значения определяются, например, по многопараметровым характеристикам 232 в зависимости от режима работы конкретного дополнительного агрегата (кондиционера, вентилятора и иного оборудования). Заданное значение передаваемого сцеплением крутящего момента логически комбинируется в координаторе 230 со значением необходимого для работы дополнительных потребителей крутящего момента mverbr, представляющим собой сумму значений крутящего момента, необходимых для работы всех учитываемых дополнительных потребителей, при этом такому значению крутящего момента, необходимого для работы дополнительных потребителей, поставлено в соответствие по меньшей мере одно свойство или качественный параметр emverbr. В рассматриваемом случае таким свойством также прежде всего является требуемое время установки на значение необходимого для работы дополнительных потребителей крутящего момента, а также при необходимости состояние отдельных дополнительных потребителей. В одном из вариантов значение необходимого для работы дополнительного оборудования крутящего момента mverbr при включенном соответствующем потребителе может, например, суммироваться в координаторе 230 с заданным значением передаваемого сцеплением крутящего момента. В этом случае в качестве результирующего свойства на дальнейшую обработку выдается, например, наименьшее время установки на заданное значение. В координаторе 229 аналогично координатору 224 величина запаса крутящего момента mresna, необходимого для обеспечения требуемого для работы дополнительных потребителей крутящего момента mverbr, логически комбинируется с прогнозируемым значением крутящего момента, передаваемого сцеплением. Согласно одному из вариантов в случае ожидаемого увеличения крутящего момента, обусловленного его расходом на работу дополнительных потребителей (при их включении), прогнозируемое значение крутящего момента увеличивается на величину запаса крутящего момента, в результате чего увеличивается и прогнозируемое значение передаваемого сцеплением крутящего момента, тогда как в случае ожидаемого снижения крутящего момента, требуемого для работы дополнительных потребителей (например, при их отключении), это прогнозируемое значение передаваемого сцеплением крутящего момента уменьшается. Выходными величинами координаторов 229 и 230 являются внешние величины, которыми на фиг.2 соответствуют выходные величины координатора 100. Таким образом, координатором 229 выдается прогнозируемое значение mprädex крутящего момента на выходном валу двигателя, а координатором 230 выдается заданное значение крутящего момента msollex на выходном валу двигателя и по меньшей мере один соответствующий ему качественный параметр emsollex.
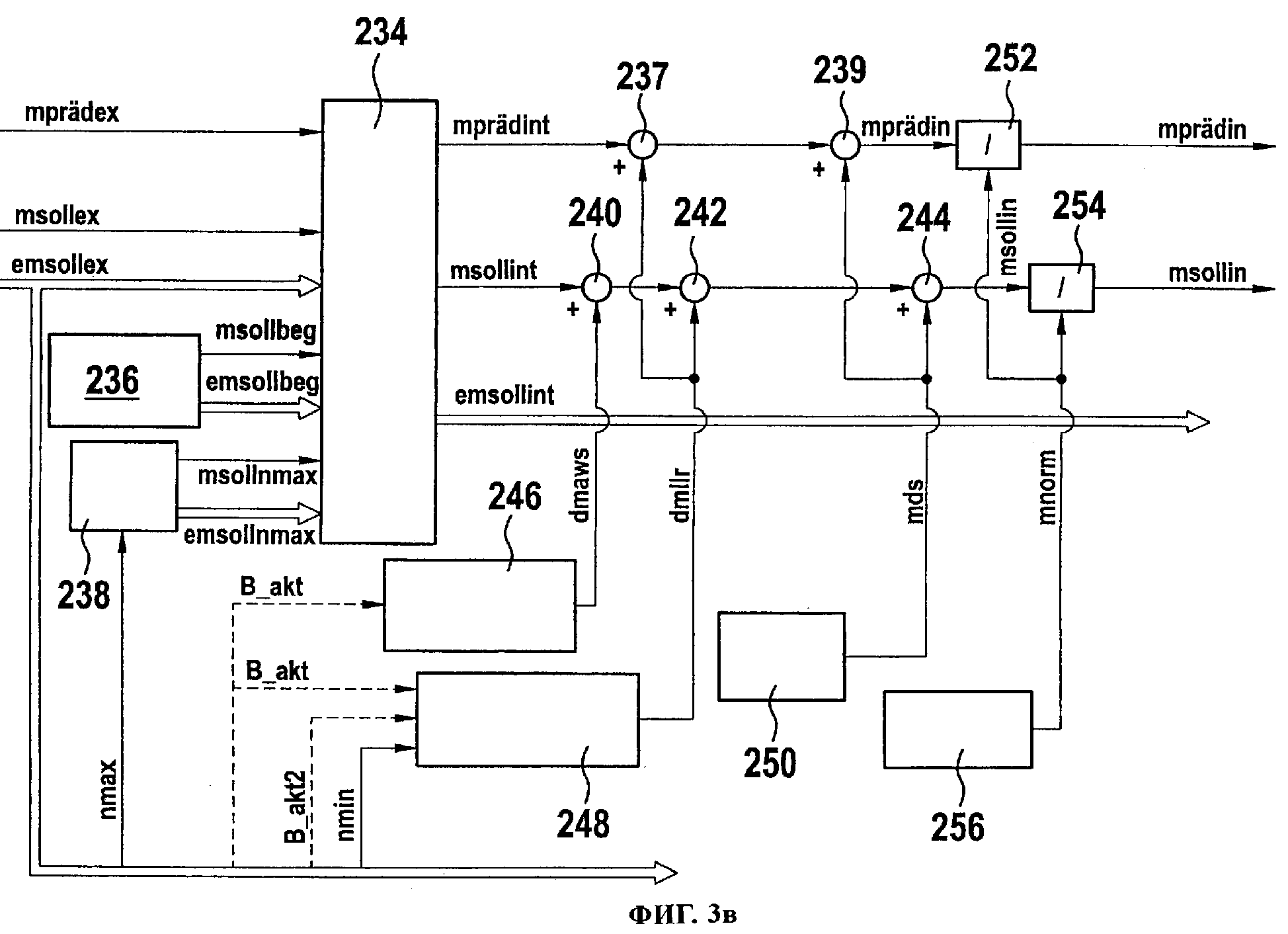
Затем указанные величины поступают, как это показано на фиг.3в, в координатор 234, в котором они подвергаются согласованию с зависящими от двигателя заданными величинами. При этом согласно предпочтительному варианту в этот координатор поступает также выдаваемое ограничителем 236 крутящего момента заданное значение крутящего момента msollbeg вместе с относящимся к нему качественным параметром emsollbeg, а также выдаваемое ограничителем 238 максимальной частоты вращения заданное значение msollnmax вместе с относящимся к нему качественным параметром emsollnmax. Выдаваемое ограничителем 236 крутящего момента заданное значение определяется, например, с учетом величины, на которую фактический крутящий момент превышает некоторое предельное значение крутящего момента, а выдаваемое ограничителем 238 максимальной частоты вращения заданное значение определяется с учетом величины, на которую частота вращения вала двигателя автомобиля превышает некоторую максимальную частоту вращения. В соответствии с этим в качестве предпочтительных качественных параметров задаются значения времени установки на соответствующее заданное значение. Как показано на фиг.Зв, максимальная частота вращения nmax может также являться одной из величин, входящих в вектор свойств emsollex, и задаваться извне.
Координатором 234 на основании поступающих в него входных величин формируются результирующие выходные величины, характеризующие крутящий момент на выходном валу двигателя, и по меньшей мере одно относящееся к нему свойство. При этом согласно предпочтительному варианту в этом координаторе из поступивших в него заданных значений выбирается наименьшее значение, которое выдается им в качестве заданного значения крутящего момента msollint на выходном валу двигателя. В другом варианте поступившие в координатор заданные значения могут логически комбинироваться между собой путем выполнения над ними арифметических операций. В одном из вариантов прогнозируемое значение крутящего момента остается неизменным, а в другом варианте соответствующим образом корректируется с учетом указанных заданных значений и прежде всего при сохраняющемся в течение длительного промежутка времени воздействия, направленного на понижение крутящего момента. В отношении по меньшей мере одного качественного параметра также осуществляется соответствующее согласование, полученный при котором по меньшей мере один результирующий качественный параметр emsollint, если он отражает время установки на заданное значение, представляет собой в зависимости от конкретного варианта осуществления изобретения либо наименьшее из всех значений времени установки на заданное значение, либо относящееся к результирующему значению крутящего момента время установки на заданное значение. Помимо этого качественные параметры могут содержать также различную информацию о режимах работы типа той, что упомянута выше.
Далее заданное значение крутящего момента msollint поступает в точку 240 логического комбинирования, где это заданное значение крутящего момента корректируется в зависимости от выходного сигнала регулятора 246, предотвращающего остановку двигателя. Этот выходной сигнал характеризует корректировочное значение или поправку dmaws, на которую следует скорректировать крутящий момент и которая формируется в зависимости от фактической частоты вращения вала двигателя и от значения частоты вращения, задаваемого предупреждающим остановку двигателя регулятором, при этом величина такой поправки, вносимой в значение крутящего момента, зависит от величины, на которую фактическая частота вращения отличается от частоты вращения, задаваемой во избежание самопроизвольной остановки двигателя. Сигнал B_akt, который свидетельствует о выполнении некоторого условия, например указывает на наличие задаваемого водителем управляющего воздействия или внешнего воздействия и по которому активизируется указанный регулятор, предпочтительно также входит в состав вектора свойств emsollex, как это показано на фиг.3в. Затем скорректированное заданное значение крутящего момента поступает в точку 242 логического комбинирования, где к этому заданному значению крутящего момента добавляется формируемое регулятором 248 частоты вращения при холостом ходе корректировочное значение dmllr, на которое следует скорректировать значение крутящего момента. Условия B_akt и B_akt2, по которым активизируется регулятор частоты вращения при холостом ходе (указывающие, например, на наличие режима холостого хода, на отсутствие задаваемого водителем управляющего воздействия и на наличие или отсутствие иных условий), также входят в состав вектора свойств emsollex. Помимо этого в состав этого вектора свойств входит также значение минимальной частоты вращения nmin, задаваемое регулятором частоты вращения при холостом ходе. Величина такой поправки dmllr, вносимой в значение крутящего момента, определяется на основании фактической и заданной частот вращения. Эта вносимая в значение крутящего момента поправка также добавляется в точке 237 логического комбинирования к прогнозируемому значению крутящего момента mprädint.
Затем на основании одно- или многопараметровых характеристик 250, отражающих зависимость от температуры и частоты вращения, определяются значения возникающих в двигателе потерь крутящего момента mds (значения развиваемого двигателем крутящего момента). Эти значения добавляются в точках 239 и 244 логического комбинирования к прогнозируемому и заданному значениям крутящего момента на выходном валу двигателя соответственно. В результате этой операции получают прогнозируемое внутреннее значение крутящего момента mprädin и внутреннее заданное значение крутящего момента msollin, которые далее нормируются в последующих блоках 252 и 254 коррекции на опорное значение крутящего момента mdnorm. Выходными величинами блоков 252 и 254 коррекции являются, таким образом, нормированные прогнозируемые внутренние значения крутящего момента mprädin, соответственно нормированные внутренние заданные значения крутящего момента msollin. Нормированное значение крутящего момента формируется на основании многопараметровой характеристики 256 в зависимости от определенных рабочих параметров (например, от частоты вращения и от нагрузки). При этом сформированный координатором 234 вектор свойств emsollint остается без изменений.
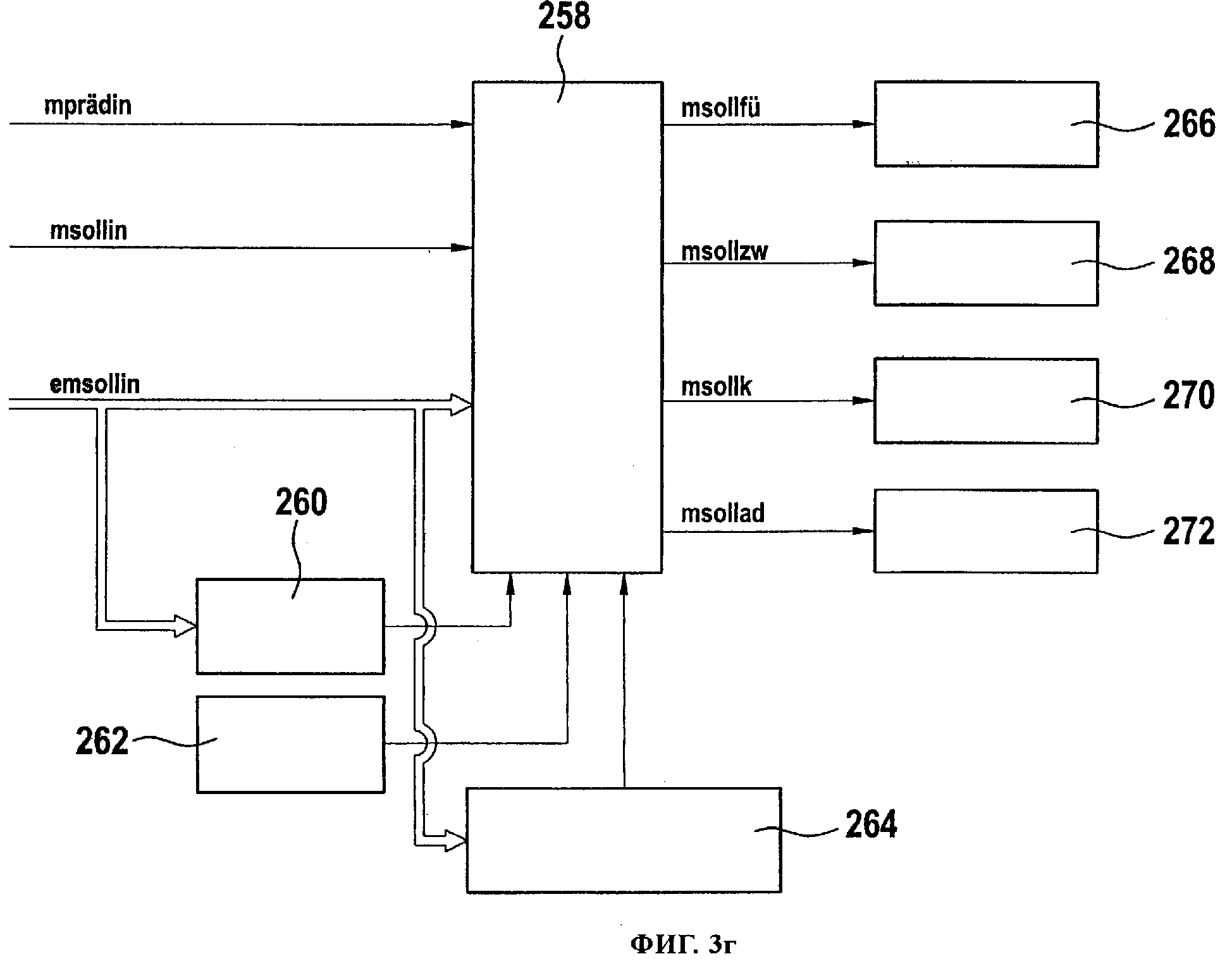
Затем согласно фиг.3г прогнозируемое внутреннее значение крутящего момента, соответственно заданное внутреннее значение крутящего момента, поступают в преобразователь 258, в который также поступает вектор свойств emsollint, с помощью которого осуществляется преобразование заданного внутреннего значения крутящего момента. На этом уровне предусмотрены далее функции, которые оказывают непосредственно воздействие на различные управляющие тракты двигателя и которыми являются, например, функция 260 по предотвращению рывков или "дерганья" автомобиля, регулятор 262, который воздействием на угол опережения зажигания обеспечивает определенный запас крутящего момента, необходимый для прогрева каталитического нейтрализатора, а также субблок 264 регулятора частоты вращения при холостом ходе, который (субблок) регулирует запас крутящего момента на холостом ходу и через который этот регулятор частоты вращения при холостом ходе воздействует на угол опережения зажигания. От этих функций в преобразователь 258 также поступают соответствующие входные управляющие воздействия, которые учитываются в нем при преобразовании заданного значения крутящего момента. Информация о конкретной области действия этих функций передается, как это показано на фиг.3г, в составе вектора свойств emsollin. На основании заданного значения крутящего момента msollin в преобразователе 258 с учетом соответствующих свойств, прежде всего с учетом необходимого времени установки на заданное значение, формируются различные заданные значения крутящего момента, которыми являются, в частности, заданное значение msollfü для установки на него путем регулирования степени наполнения цилиндров, заданное значение msollzw для установки на него путем регулирования опережения зажигания, заданное значение msollk для установки на него путем регулирования параметров впрыскивания, соответственно путем отключения некоторых цилиндров и при необходимости заданное значение msolllad для установки на него путем регулирования нагнетателя. Соответствующие регулируемые параметры настраиваются на эти заданные значения с помощью соответствующих исполнительных устройств 266, 268, 270 и 272, при этом значение крутящего момента, заданное для установки на него путем регулирования степени наполнения цилиндров, сначала пересчитывается в заданное положение дроссельной заслонки, а другие значения крутящего момента, заданные для установки на них путем регулирования иных параметров, преобразуются для уменьшения рассогласования в соответствующие управляющие воздействия с учетом фактического значения крутящего момента. Один из подобных подходов по преобразованию заданных значений в управляющие воздействия известен из уровня техники. При преобразовании заданных значений в управляющие воздействия учитываются также прогнозируемое значение крутящего момента и задаваемые регулятором прогрева каталитического нейтрализатора и регулятором частоты вращения при холостом ходе величины запаса крутящего момента. Из всех имеющихся заданных значений (т.е. из значения msollin, значения mprädin, величины запаса крутящего момента) предпочтительно выбирать максимальное значение и выдавать его в качестве заданного значения для установки на него регулированием степени наполнения цилиндров, т.е. в качестве заданного значения степени наполнения цилиндров. В зависимости от времени установки на заданное значение активизируются и другие воздействия и формируются соответствующие заданные значения. Выходные величины указанных выше функций (регулятора частоты вращения при холостом ходе, регулятора, предотвращающего рывки автомобиля), которые непосредственно воздействуют на различные управляющие тракты (изменяют угол опережения зажигания), непосредственно добавляются к соответствующим заданным значениям крутящего момента.
Рассмотренные выше в их сочетании меры можно в зависимости от конкретного варианта выполнения использовать в произвольной их комбинации и даже по отдельности. Предпочтительна при этом реализация указанных мер в виде компьютерной программы, хранящейся на некотором носителе информации (на дискете, в отдельном модуле памяти, в памяти процессора и т.д.).
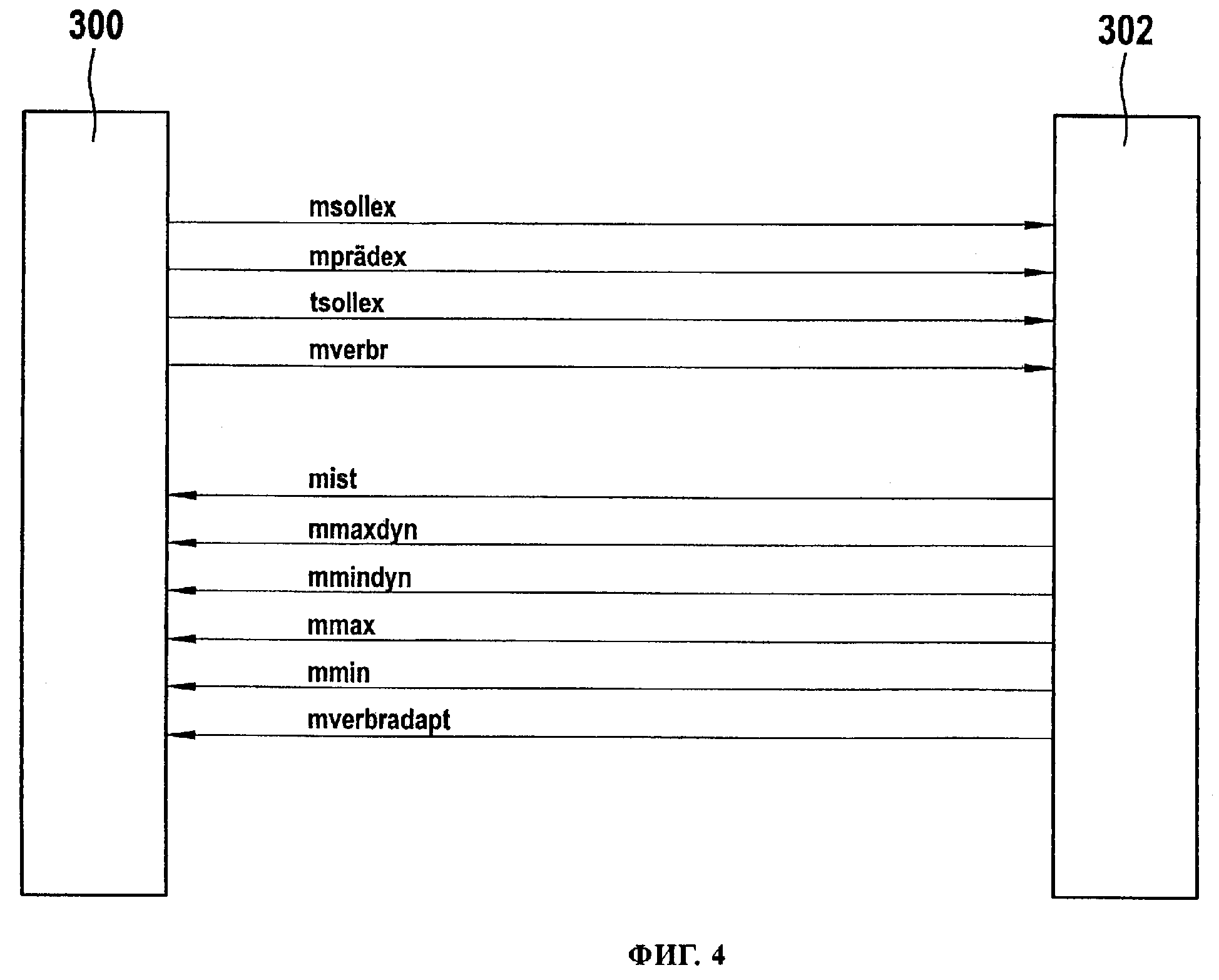
Ниже на примере предпочтительного варианта выполнения изобретения со ссылкой на фиг.4 и 5 описан конкретный вариант выполнения интерфейса между зависящей и не зависящей от двигателя частями системы управления с указанием поступающих в каждую из этих частей величин и выдаваемых каждой из них величин. На фиг.4 представлены все относящиеся к крутящему моменту величины и параметры, соответственно величины и параметры, непосредственно связанные с регулированием крутящего момента, а на фиг.5 представлены остальные величины. Эти остальные параметры в приведенном выше описании в основном объединены в вектор свойств. При этом разделение указанного интерфейса на отдельно представленные на фиг.4 и 5 части обусловлено только соображениями наглядности.
Особенность показанного на фиг.4 и 5 интерфейса состоит помимо прочего в передаче различных величин от зависящей от двигателя части в не зависящую от двигателя часть системы управления.
Выдаваемые зависящей от двигателя частью 302 и не зависящей от двигателя частью 300 величины, относящиеся к крутящему моменту (предпочтительно значения передаваемого сцеплением крутящего момента, значения крутящего момента на коленчатом валу или иные значения крутящего момента на выходном валу двигателя), показаны на фиг.4. При этом зависящая от двигателя часть 302 и не зависящая двигателя часть 300 в основном соответствуют схеме, изображенной на фиг.3.
Как уже пояснялось выше при описании показанного на фиг.3 варианта, не зависящей от силового агрегата частью 300 выдается заданное значение крутящего момента msollex, прогнозируемое заданное значение крутящего момента mprädex, которое может задаваться с учетом задаваемого запаса крутящего момента (оба значения выражены, например, в Н-м), а также заданное время установки tsollex (например, в мс), за которое крутящий момент должен установиться на заданное значение. Последняя величина, т.е. время установки на заданное значение, является согласно предыдущему описанию частью вектора свойств. Пример использования этих величин в зависящей от двигателя части рассмотрен выше. Помимо этого согласно фиг.4 не зависящей от двигателя частью 300 выдается значение крутящего момента mverbr (например, выраженное в Н-м), необходимого для работы дополнительных агрегатов. Методика определения этого значения крутящего момента рассмотрена выше. Такое значение представляет собой разность между значением крутящего момента на выходном валу двигателя и значением крутящего момента, передаваемого сцеплением. Это значение подвергается обработке в зависящей от двигателя части, например учитывается при вычислении возникающих в двигателе потерь крутящего момента. В одном из вариантов от не зависящей от двигателя части 300 в зависящую от двигателя часть 302 передается также величина требуемого крутящего момента (например, выраженная в Н-м), которая на фиг.4 не показана и которая отражает заданное значение крутящего момента без коррекции при воздействии со стороны системы управления коробкой передач.
На уровне регулирования крутящего момента зависящей от двигателя частью 302 выдается согласно фиг.4 фактическое значение крутящего момента mist (предпочтительно фактическое значение крутящего момента на коленчатом валу), которое может представлять собой измеренное или рассчитанное значение. Кроме того, этой частью выдается также информация о максимальном диапазоне регулирования для быстродействующего (динамичного) управляющего тракта (регулирование опережения зажигания, количества топлива и иных параметров), пределы которого (диапазона) определяются максимальным mmaxdyn и минимальным mmindyn значениями крутящего момента, на которые крутящий момент можно установить изменением регулируемых параметров быстродействующего управляющего тракта. Эти величины обрабатываются, например, внешними функциями, такими как противобуксовочная система, при этом значения mmaxdyn или mmindyn несут информацию о возможном диапазоне быстрого (динамичного) регулирования, тогда как значение mist используется при вычислении заданных значений. Помимо этого зависящей от двигателя частью 302 задаются однопараметровые характеристики, отражающие зависимость максимально и минимально достижимого в стационарном режиме значения крутящего момента mmax и mmin соответственно (минимальное значение крутящего момента соответствует максимально достижимому тяговому моменту, развиваемому двигателем), например, от частоты вращения. Эти значения крутящего момента используются в качестве информации о состоянии при определении стратегии переключения передач. Такие однопараметровые характеристики передаются в виде пар значений и сохраняются в не зависящей от двигателя части. Зависящей от двигателя частью 302 выдается далее адаптивное корректировочное значение mverbradapt, на которое корректируется значение крутящего момента mverbr, необходимого для работы дополнительных потребителей, и которое определяется известным способом (см., например, DE-A 4304779 или US 5484351). Используя подобную информацию, не зависящая от двигателя часть способна скорректировать проводимые ею вычисления значения крутящего момента mverbr, необходимого для работы дополнительных потребителей. На чертежах не показаны другие величины, которые передаются от зависящей от двигателя части 302 в не зависящую от двигателя часть 302 в дополнение к указанным величинам или вместо них и к которым относится, например, фактически развиваемый двигателем тяговый момент, который рассчитывается, например, в соответствии с указанным выше уровнем техники, фактический максимальный крутящий момент (крутящий момент на коленчатом валу, зависящий от текущего режима работы) и/или достижимые при наличии оптимальных условий (в зависимости от частоты вращения, высоты над уровнем моря, температуры и иных факторов) максимальное и минимальное значения крутящего момента (минимальное значение крутящего момента соответствует максимально достижимому тяговому моменту, развиваемому двигателем). В одном из вариантов все такие значения крутящего момента имеют размерность Н-м.
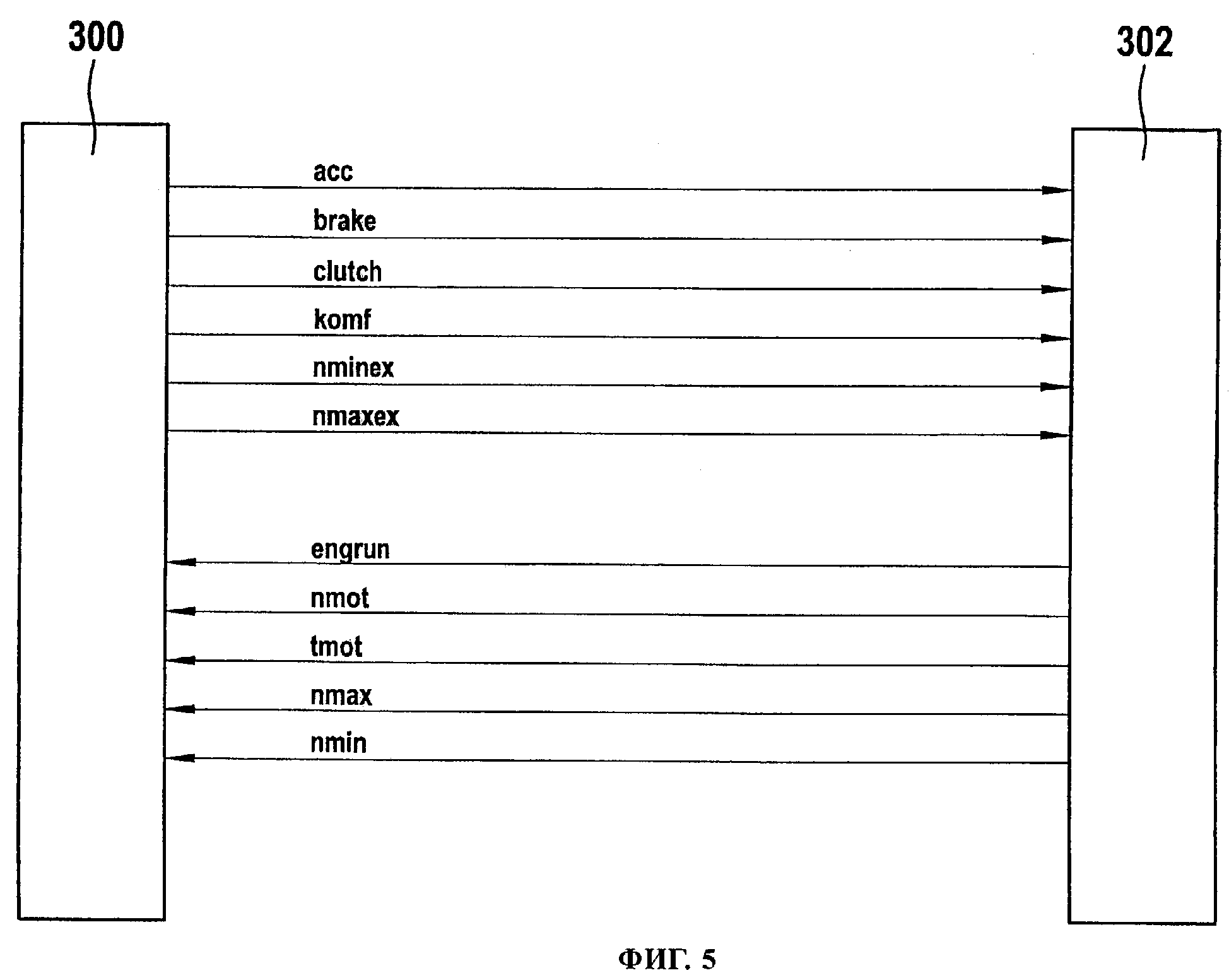
Вне уровня, на котором происходит обмен значениями крутящего момента, не зависящей от двигателя частью выдаются, как это показано на фиг.5, сигналы (либо непрерывно, либо при срабатывании контактов соответствующих выключателей или переключателей), характеризующие (например, в виде выраженной в % величины) степень нажатия педали акселератора (асс), педали тормоза (brake) и педали сцепления (clutch). Эти величины подвергаются в зависящей от двигателя части 302 соответствующей обработке, например для активизации различных функций, например для включения регулятора частоты вращения при холостом ходе, функции по обеспечению комфортабельности езды и иных функций. Для учета при расчетах также тех системных компонентов, которые не оснащены необходимыми для этой цели контрольно-измерительными устройствами (сенсорикой), через интерфейс вместо указанных величин или в дополнение к ним можно передавать (например, в виде двоичного сигнала) информацию о срабатывании контактов выключателя при нажатии на педаль тормоза и/или контактов выключателя при нажатии на педаль сцепления. На чертеже не показана далее информация о задаваемом водителем режиме холостого хода (запрос на установку крутящего момента на минимальное значение, передаваемый предпочтительно также в виде двоичного сигнала), которая в одном из вариантов также может передаваться вместо указанных величин или в дополнение к ним. Еще одной не показанной на чертежах величиной (также передаваемой в виде двоичного сигнала) является информация о наличии в трансмиссии силового замыкания.
Помимо этого выдается метка komf (кодовое слово), несущая информацию о режиме работы функций по обеспечению комфортабельности езды (активизированы или нет), таких как функция по предупреждению скачкообразного изменения нагрузки или функция по демпфированию дроссельной заслонки. Эта величина (метка) используется в зависящей от двигателя части 302, например, для оценки, следует ли учитывать при регулировании (изменении) крутящего момента связанные с обеспечением комфортабельности езды аспекты (например, скорость изменения регулируемой величины, предотвращение движения автомобиля рывками и иные факторы), и/или подвергается соответствующей обработке для активизации функций по обеспечению комфортабельности езды, таких как функция по предупреждению скачкообразного изменения нагрузки или функция по демпфированию дроссельной заслонки. В наиболее общем случае эта величина, таким образом, содержит информацию о том, следует ли отдавать приоритет обеспечению комфортабельности при управлении, т.е. при изменении тех или иных регулируемых параметров, или нет. Эта величина может дополнительно или альтернативно нести информацию о том, ограничена ли скорость изменения (градиент) задаваемого водителем управляющего воздействия по соображениям обеспечения комфортабельности, следует ли при управлении работой двигателя сохранять силовое замыкание в кинематической цепи (в трансмиссии), следует ли учитывать ограничения, вводимые для защиты узлов и деталей от их интенсивного износа и выхода из строя, требуется ли динамичное или высокодинамичное изменение регулируемого параметра, следует ли учитывать воздействие со стороны функций по обеспечению комфортабельности езды при регулировании различных выходных параметров двигателя, следует ли присваивать задаваемому водителем значению регулируемого параметра наивысший приоритет и отрабатывать это значение в первую очередь и т.д.
Другие не показанные на чертежах величины могут нести информацию о выбранном режиме работы коробки передач (в частности, о положении селектора автоматической коробки передач, например, о его нахождении в нейтральном положении (положение "N"), в положении, соответствующем принудительному выбору только 1-й передачи (положение "1"), в положении, соответствующем принудительному выбору только 1-й и 2-й передач (положение "2"), в положении, соответствующем обычному режиму движения вперед (положение "D"), в положении, соответствующем движению задним ходом (положение "R"), в положении, соответствующем стоянке автомобиля (положение "Р"), в положении, соответствующем зимнему режиму эксплуатации автомобиля, и т.д.), о типе коробки передач (коробка с ручным переключением передач, автоматическая коробка передач, бесступенчатая коробка передач, автоматизированная коробка передач), о фактически включенной передаче (нейтральное положение, первая передача, вторая передача и т.д.) и/или о положении выключателя зажигания ("выключено", "стоянка", положение, соответствующее режиму питания автомагнитолы, положение, соответствующее подачи тока в блок управления (клемма "15"), положение, соответствующее включению стартера (клемма "50") и т.д.). Такую информацию предпочтительно передавать в кодированном виде в виде слова заданной длины (разрядности).
В одном из вариантов от не зависящей от двигателя части в зависящую от двигателя часть дополнительно передаются не зависящие от режима работы двигателя измеряемые параметры, такие как температура окружающей среды, атмосферное давление, скорость движения автомобиля, напряжение аккумуляторной батареи и иные параметры.
Помимо этого передаются задаваемые извне минимальное и максимальное значения частоты вращения (nminex, nmaxex), которые представляют собой, например, значения, задаваемые регулятором частоты вращения при холостом ходе, и/или регулятором, предотвращающим остановку двигателя (значение nminex), соответственно системой ограничения максимальной частоты вращения (значение nmaxex).
От зависящей от двигателя части 302 в не зависящую от двигателя часть 300 в свою очередь передаются информация engrun (двигатель работает), зависящие от режима работы двигателя измеряемые параметры, такие как частота вращения nmot вала двигателя и/или фактическая температура двигателя tmot, а также фактическая максимально допустимая частота вращения nmax и фактическая минимально допустимая частота вращения nmin (соответствующая фактической заданной частоте вращения при холостом ходе). Эти величины используются в не зависящей от двигателя части либо при вычислениях (например, значение nmot используется при определении задаваемого водителем крутящего момента), либо в качестве информации о состоянии. На чертежах не показаны величина, выдаваемая интегральной составляющей регулятора частоты вращения при холостом ходе, и/или информация об отключении режима принудительного холостого хода, которые в одном из вариантов передаются от зависящей от двигателя части в не зависящую от двигателя часть в дополнение к остальной информации или вместо нее.
Указанные выше величины и информация передаются через интерфейс в зависимости от конкретной прикладной системы либо по отдельности, либо любом их сочетании с учетом требований и граничных условий, накладываемых конкретным исполнением системы управления.
В зависимости от конкретного применения зависящая и не зависящая от двигателя части системы управления могут быть выполнены в виде одного процессора, в виде двух различных процессоров в составе одного блока управления или же в виде двух пространственно отдельных блоков управления.
Реферат
Изобретение относится к двигателестроению, в частности к способу и устройству управления силовым агрегатом транспортного средства. Изобретение позволяет упростить управление силовым агрегатом. В способе управления силовым агрегатом транспортного средства, имеющим по меньшей мере один регулируемый параметр, который регулируют в зависимости по меньшей мере от одного заданного значения некоторого выходного параметра силового агрегата. Заданное значение выбирают из нескольких заданных значений. На первой стадии заданные значения, не зависящие от силового агрегата, используют для формирования первого заданного значения. На второй стадии на основании этого первого заданного значения и по меньшей мере одного зависящего от двигателя заданного значения формируют второе заданное значение, влияющее на указанный по меньшей мере один регулируемый параметр. Устройство управления силовым агрегатом транспортного средства имеет по меньшей мере один блок управления по меньшей мере с одним микрокомпьютером, который для управления силовым агрегатом позволяет выдавать в зависимости по меньшей мере от одного заданного значения выходного параметра силового агрегата по меньшей мере одно управляющее воздействие на изменение регулируемого параметра. Первая часть содержит не зависящие от двигателя программы и взаимодействует через заданный интерфейс со второй его частью, содержащей зависящие от двигателя программы. Первая часть позволяет выдавать в этот интерфейс заданные величины и параметры и принимать от зависящей от двигателя части заданные величины и параметры. По второму варианту устройство управления силовым агрегатом транспортного средства имеет по меньшей мере один блок управления по меньшей мере с одним микрокомпьютером, который для управления силовым агрегатом позволяет выдавать в зависимости по меньшей мере от одного заданного значения выходного параметра силового агрегата по меньшей мере одно управляющее воздействие на изменение регулируемого параметра. Часть содержит зависящие от двигателя программы и взаимодействует через заданный интерфейс с частью, содержащей не зависящие от двигателя программы. Зависящая от двигателя часть позволяет выдавать в этот интерфейс заданные величины и параметры и принимать от не зависящей от двигателя части заданные величины и параметры. 3 н. и 9 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Автоматическая система и способ регулировки частоты вращения двигателя (варианты)
Способ работы четырехтактного двигателя внутреннего сгорания
Комментарии