Вагонный замедлитель, снабженный по меньшей мере одним вертикально подвижным тормозным элементом, а также способ определения его текущего положения - RU2564299C2
Код документа: RU2564299C2
Чертежи


Описание
Изобретение касается вагонного замедлителя, снабженного по меньшей мере одним вертикально подвижным тормозным элементом.
Вагонные замедлители представляют собой механические тормозные устройства, которые применяются в маневровых сортировочных горках для управления скоростью сортируемых единиц в виде отдельных вагонов или групп вагонов. В зависимости от соответствующего исполнения горки, а также соответствующей функции вагонного замедлителя при этом применяются различные виды вагонных замедлителей. Так, в качестве вагонных замедлителей нижней тормозной позиции и парковых вагонных замедлителей применяются, в частности, балочные замедлители или, соответственно, балочные вагонные замедлители. У этих замедлителей замедление сортируемых вагонов происходит за счет того, что тормозные балки сбоку прижимаются к колесам. Напротив, установленные в парковых вагонных замедлителях замедлители для компенсации уклона часто выполняются в виде минимальных тормозов, снабженных поршневыми элементами, которые при переезде колесом рельсового транспортного средства прижимаются вниз и при этом абсорбируют энергию.
Независимо от вида данного вагонного замедлителя может быть желательно или, соответственно, необходимо, чтобы отдельные тормозные элементы вагонных замедлителей были выполнены вертикально подвижными, то есть, в частности, опускаемыми или, соответственно, переставляемыми по высоте. В зависимости от каждого варианта осуществления вагонного замедлителя при этом может, с одной стороны, происходить активирование или, соответственно, деактивирование соответствующего тормозного элемента или, соответственно, вагонного замедлителя. С другой стороны, при этом, например, существует возможность опускать указанный по меньшей мере один вертикальный тормозной элемент, чтобы за счет этого обеспечивать возможность движения по вагонному замедлителю тяговой единицы подвижного состава.
Вагонный замедлитель вышеназванного рода, снабженный по меньшей мере одним вертикально подвижным тормозным элементом, известен, например, из немецкого описания изобретения к патенту DE 3626390 A1. В нем описан вагонный замедлитель в виде балочного замедлителя, снабженного вертикально подвижными тормозными элементами в виде опускаемых тормозных балок. При этом вагонный замедлитель в опущенном конечном положении тормозных балок не только не действует, но и не нарушает габариты, так что через этот замедлитель могут двигаться транспортные средства, которые не могут и/или которым не разрешается двигаться через вагонный замедлитель в поднятом конечном положении тормозной балки из-за того, что это приводит к повреждениям транспортного средства и/или вагонного замедлителя. Для контроля верхнего и нижнего конечного положения тормозных балок известный вагонный замедлитель имеет сенсор, который предпочтительно выполнен в виде индуктивного бесконтактного переключателя и взаимодействует по меньшей мере с одной управляющей тягой, которая механически соединена с тормозной балкой и имеет средства для активирования сенсора в двух конечных положениях управляющей тяги.
В основе настоящего изобретения лежит задача предложить вагонный замедлитель, снабженный по меньшей мере одним вертикально подвижным, в частности опускаемым тормозным элементом, который позволяет определять текущее положение указанного по меньшей мере одного вертикально подвижного тормозного элемента сравнительно простым и одновременно особенно надежным образом.
Эта задача в соответствии с изобретением решается с помощью вагонного замедлителя, снабженного по меньшей мере одним вертикально подвижным, в частности опускаемым тормозным элементом, причем этот вагонный замедлитель имеет сенсор наклона, который расположен таким образом, что на основании по меньшей мере одного значения измерения сенсора наклона может определяться текущее положение указанного по меньшей мере одного вертикально подвижного тормозного элемента.
Предлагаемый изобретением вагонный замедлитель отличается, таким образом, тем, что он имеет сенсор наклона, который благодаря своему расположению позволяет на основании по меньшей мере одного зарегистрированного им значения измерения определять текущее положение указанного по меньшей мере одного вертикально подвижного тормозного элемента. При этом в рамках настоящего изобретения под сенсором наклона вообще понимается сенсорное устройство, которое пригодно для определения значения измерения, непосредственно или опосредствованно указывающего вертикальную ориентацию указанного по меньшей мере одного вертикально подвижного тормозного элемента. При этом такой сенсор наклона может определять вертикальную ориентацию по любому, собственно известному принципу измерения. Соответствующие сенсоры наклона известны, например, из уровня техники как сенсоры ускорений, выполненные для измерения действующих статических ускорений, т.е., в частности, ускорения свободного падения или, соответственно, ускорения силы тяжести, и имеются на рынке по сравнительно приемлемой стоимости. При этом изобретение использует то, что у вагонного замедлителя, снабженного вертикально подвижным тормозным элементом, как правило, сенсор наклона может располагаться таким образом, чтобы на основании его значения измерения или, соответственно, его значений измерений можно было делать заключение о текущем положении указанного по меньшей мере одного вертикально подвижного тормозного элемента.
Предлагаемый изобретением вагонный замедлитель обладает тем преимуществом, что сенсор наклона сравнительно простым образом может располагаться на или внутри одного из компонентов вагонного замедлителя, без необходимости для этого трудоемких конструктивных мер. Благодаря этому не только снижается трудоемкость изготовления вагонного замедлителя или, соответственно, реализация контроля или, соответственно, определения его текущего положения, т.е. текущего положения указанного по меньшей мере одного вертикально подвижного тормозного элемента, но и, кроме того, также повышается устойчивость к механическим повреждениям или, соответственно, надежность вагонного замедлителя.
Здесь следует указать на то, что предлагаемый изобретением вагонный замедлитель, разумеется, может также иметь несколько сенсоров наклона. При этом, например, в случае вертикально подвижных тормозных элементов может быть предусмотрено по одному сенсору наклона для определения или, соответственно, контроля текущего положения одного из этих тормозных элементов. Кроме того, существует, например, также возможность, чтобы для дополнительного повышения надежности и безотказности были также предусмотрены несколько сенсоров наклона для одного единственного вертикально подвижного тормозного элемента.
Вертикально подвижный тормозной элемент может, например, представлять собой, в частности, такой компонент вагонного замедлителя, который при контакте с колесами сортируемых единиц отбирает у них энергию и при этом тормозит. Так, вертикально подвижный тормозной элемент в случае балочного замедлителя может, например, представлять собой опускаемую или, соответственно, переставляемую по высоте тормозную балку, а в случае замедлителя для компенсации уклона, например, гидравлический тормоз или, соответственно, поршневой элемент такого тормоза. В принципе, при этом возможно, чтобы сенсор наклона был расположен непосредственно на или внутри соответствующего вертикально подвижного тормозного элемента.
По одному из особенно предпочтительных усовершенствований предлагаемого изобретением вагонного замедлителя сенсор наклона расположен на или внутри другого элемента вагонного замедлителя, отличающегося от указанного по меньшей мере одного вертикально подвижного тормозного элемента. Это предпочтительно, так как расположение сенсора наклона непосредственно на или внутри указанного по меньшей мере одного вертикально подвижного тормозного элемента на практике часто невозможно или возможно только со значительными усилиями. Так, с одной стороны, например, может быть, что расположение сенсора наклона на или внутри указанного по меньшей мере одного вертикально подвижного тормозного элемента по конструктивным причинам является трудным или невозможным. С другой стороны, надежность самого сенсора наклона в этом случае также может быть ухудшена. Благодаря расположению сенсора наклона на или внутри другого элемента вагонного замедлителя, отличающегося от указанного по меньшей мере одного вертикально подвижного тормозного элемента, таким образом, предпочтительно можно с учетом соответствующих обстоятельств и условий выбирать особенно удобное место монтажа для сенсора наклона. Условием для этого является только то, чтобы сенсор наклона был расположен таким образом, чтобы его значения измерений позволяли делать заключение о текущем положении указанного по меньшей мере одного вертикально подвижного тормозного элемента. Это может, например, обеспечиваться за счет того, что сенсор наклона располагается на или внутри другого элемента вагонного замедлителя, который механически соединен с указанным вертикально подвижным тормозным элементом и изменяет свой наклон с зависимости от текущего положения указанного по меньшей мере одного вертикально подвижного тормозного элемента.
В принципе, предлагаемый изобретением вагонный замедлитель может также представлять собой вагонный замедлитель любого вида.
По одному из особенно предпочтительных вариантов осуществления предлагаемого изобретением вагонного замедлителя вагонный замедлитель является балочным замедлителем. Это предпочтительно, так как балочные замедлители в маневровых сортировочных горках широко распространены и часто имеют вертикально подвижные тормозные элементы в виде тормозных балок.
Предпочтительно предлагаемый изобретением вагонный замедлитель может быть при этом усовершенствован таким образом, чтобы сенсор наклона был расположен на или внутри пакета пружин балочного замедлителя. Это предпочтительно, так как тормозные балки балочных замедлителей обычно опираются на пакеты упругих пружин, которые могут предварительно натягиваться посредством управления замедлителя, так что на проходящие через балочный замедлитель колеса транспортного средства могут действовать различные тормозные усилия. Предпочтительным образом пакеты пружин балочного замедлителя находятся при этом на некотором расстоянии от рельсов или, соответственно, проходящих мимо вагонов или, соответственно, групп вагонов, так что сенсор наклона при расположении на или внутри пакета пружин балочного замедлителя сравнительно защищен от механических воздействий. Кроме того, пакеты пружин по конструктивным причинам обычно механически соединены с вертикально подвижными тормозными элементами балочного замедлителя в виде тормозной балки таким образом, что по наклону пакетов пружин, т.е. на основании по меньшей мере одного значения измерения сенсора наклона, расположенного на или внутри пакета пружин балочного вагонного замедлителя, может определяться текущее положение тормозной балки или, соответственно, тормозных балок.
По другому особенно предпочтительному варианту осуществления предлагаемого изобретением вагонного замедлителя вагонный замедлитель представляет собой замедлитель для компенсации уклона. Это предпочтительно, так как замедлители для компенсации уклона, которые, например, могут быть выполнены в виде винтовых вагонных замедлителей или так называемых вагонных замедлителей Доути, в маневровых сортировочных горках широко распространены для регулирования скорости на сортировочных путях. При этом обычно соответствующие замедлители для компенсации уклона для их активирования или, соответственно, деактивирования или же для обеспечения возможности переезда тяговыми единицами подвижного состава имеют вертикально подвижные тормозные элементы, например, в виде гидравлических тормозных цилиндров.
Предпочтительно предлагаемый изобретением вагонный замедлитель может быть при этом также выполнен таким образом, чтобы сенсор наклона был расположен на или внутри опускающего устройства замедлителя для компенсации уклона. Это предпочтительно, так как наклон или, соответственно, положение опускающего устройства замедлителя для компенсации уклона, то есть элемента, который, например, служит для опускания гидравлического тормозного цилиндра, обычно позволяет делать заключение о текущем положении указанного по меньшей мере одного вертикально подвижного тормозного элемента в виде гидравлического тормозного цилиндра замедлителя для компенсации уклона.
Предпочтительно предлагаемый изобретением вагонный замедлитель может быть также выполнен таким образом, чтобы сенсор наклона был выполнен для передачи указанного по меньшей мере одного значения измерения устройству аналитической обработки. Это обеспечивает то преимущество, что определение текущего положения указанного по меньшей мере одного вертикально подвижного тормозного элемента должно осуществляться не самим сенсором наклона, а при необходимости может осуществляться совершенно отдельным компонентом. Предпочтительным образом соответствующее устройство аналитической обработки может быть при этом, например, составной частью устройства управления маневровой установки в виде сортировочной горки.
Настоящее изобретение касается также способа определения текущего положения по меньшей мере одного вертикально подвижного, в частности, опускаемого тормозного элемента вагонного замедлителя.
С точки зрения способа в основе настоящего изобретения лежит задача указать сравнительно просто реализуемый и одновременно особенно надежный способ определения текущего положения по меньшей мере одного вертикально подвижного, в частности, опускаемого тормозного элемента вагонного замедлителя.
Эта задача в соответствии с изобретением решается с помощью способа определения текущего положения по меньшей мере одного вертикально подвижного, в частности, опускаемого тормозного элемента вагонного замедлителя, при котором посредством сенсора наклона регистрируется по меньшей мере одно значение измерения и по этому по меньшей мере одному значению измерения определяется текущее положение указанного по меньшей мере одного вертикально подвижного тормозного элемента.
Преимущества предлагаемого изобретением способа соответствуют преимуществам предлагаемого изобретением вагонного замедлителя, так что в этом отношении ссылаемся на соответствующие предыдущие рассуждения. То же самое относится к приведенным ниже предпочтительным усовершенствованиям предлагаемого изобретением способа с учетом соответствующих предпочтительных усовершенствований предлагаемого изобретением вагонного замедлителя, так что также в этом отношении ссылаемся на соответствующие предыдущие пояснения.
Предпочтительно предлагаемый изобретением способ может осуществляться таким образом, чтобы указанное значение измерения регистрировалось сенсором наклона, расположенным на или внутри другого элемента вагонного замедлителя, отличающегося от указанного по меньшей мере одного вертикально подвижного тормозного элемента.
По другому особенно предпочтительному варианту осуществления предлагаемого изобретением способа определяется текущее положение по меньшей мере одного вертикально подвижного элемента вагонного замедлителя в виде балочного замедлителя.
Предпочтительно предлагаемый изобретением способ реализован при этом также таким образом, чтобы указанное по меньшей мере одно значение измерения регистрировалось сенсором наклона, расположенным на или внутри пакета пружин балочного замедлителя.
По одному из особенно предпочтительных усовершенствований предлагаемого изобретением способа определяется текущее положение по меньшей мере одного вертикально подвижного элемента вагонного замедлителя в виде замедлителя для компенсации уклона.
Предпочтительно предлагаемый изобретением способ может быть при этом также реализован таким образом, чтобы указанное по меньшей мере одно значение измерения регистрировалось сенсором наклона, расположенным на или внутри опускающего устройства замедлителя для компенсации уклона.
Предпочтительно предлагаемый изобретением способ усовершенствован таким образом, что указанное по меньшей мере одно значение измерения передается устройству аналитической обработки.
По другому особенно предпочтительному варианту осуществления предлагаемого изобретением способа сигнал, идентифицирующий текущее положение указанного по меньшей мере одного вертикально подвижного элемента вагонного замедлителя, передается устройством аналитической обработки устройству контроля. При этом, например, возможно, чтобы устройство аналитической обработки было выполнено в виде составной части сенсора наклона или вагонного замедлителя, а устройство контроля являлось компонентой устройства управления маневровой установки.
Ниже изобретение поясняется подробнее на примерах осуществления. Для этого показано:
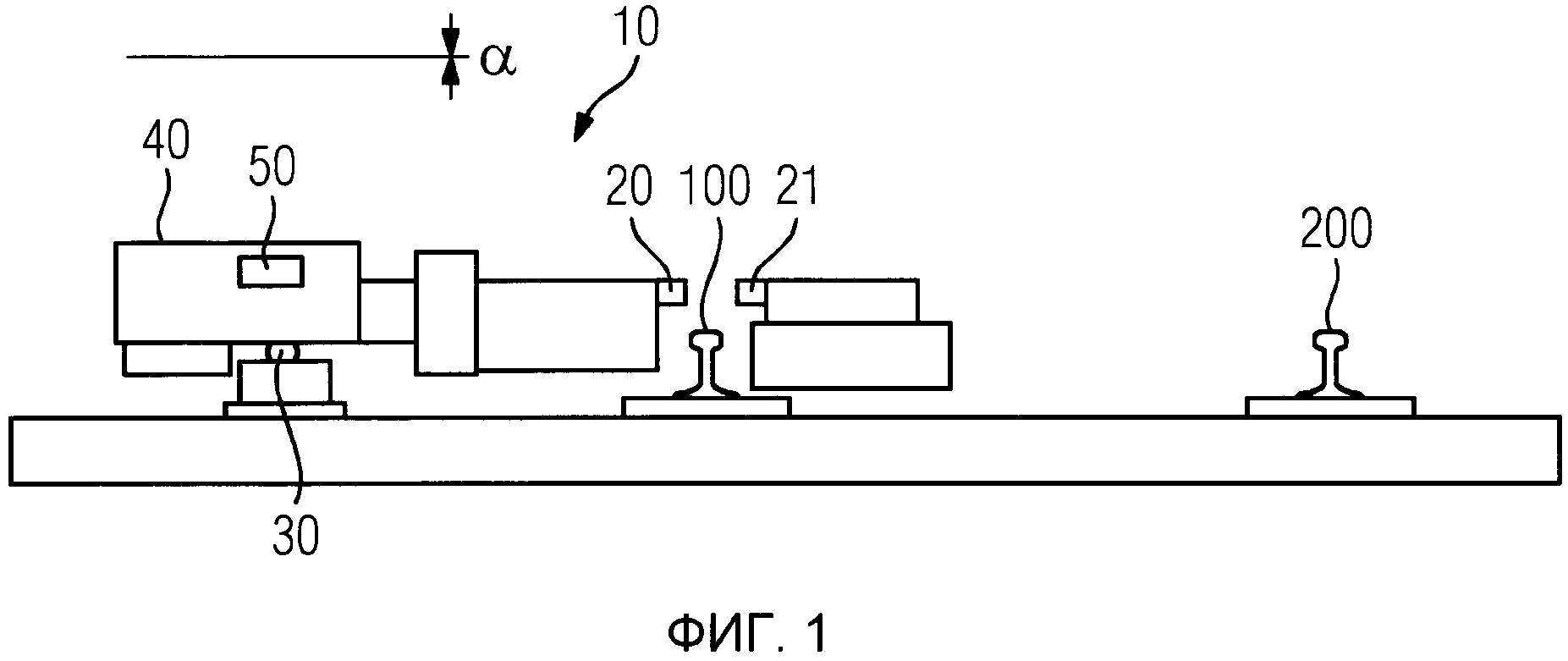
Фиг.1 - на схематичном эскизе первый пример осуществления предлагаемого изобретением вагонного замедлителя в виде балочного замедлителя в активном состоянии;
Фиг.2 - на схематичном эскизе вагонный замедлитель в соответствии с примером осуществления фиг.1 в неактивном состоянии;
Фиг.3 - на схематичном эскизе второй пример осуществления предлагаемого изобретением вагонного замедлителя в виде замедлителя для компенсации уклона в активном состоянии; и
Фиг.4 - на схематичном эскизе вагонный замедлитель в соответствии с примером осуществления фиг.3 в неактивном состоянии.
На фиг.1 и 2 или, соответственно, на фиг.3 и 4 в целях обзорности идентичные компоненты всегда обозначены одними и теми же ссылочными обозначениями.
На фиг.1 показан на схематичном эскизе первый пример осуществления предлагаемого изобретением вагонного замедлителя в виде балочного замедлителя в активном состоянии. Изображен балочный замедлитель 10, который имеет наружную тормозную балку 20, а также внутреннюю тормозную балку 21, расположенные в области рельса 100 таким образом, что колеса проходящих через балочный замедлитель 10 вагонов или, соответственно, групп вагонов тормозятся при взаимодействии с тормозными балками 20, 21.
Следует указать на то, что на фиг.1 в целях обзорности показан только один односторонний балочный замедлитель 10. Независимо от этого, разумеется, балочный замедлитель 10 мог бы быть выполнен также в виде двухстороннего балочного замедлителя, в этом случае для второго рельса 200 также было бы предусмотрено соответствующее тормозное устройство.
Соответственно изображению фиг.1, балочный замедлитель 10 имеет также точку 30 поворота, на которую опирается пакет 40 пружин. При этом посредством пакета 40 пружин можно нагружать тормозные балки 20, 21 управляемым прижимным усилием и при этом управлять тормозным усилием, действующим на колеса.
Для создания наибольшей возможной тормозной мощности для затормаживания проходящих мимо колес целесообразно, чтобы тормозные балки 20, 21 воздействовали на колеса на максимальной возможной высоте. Это приводит к тому, что тяговой единице подвижного состава, например, в виде маневрового локомотива в изображенном на фиг.1 активном состоянии балочного замедлителя невозможно пройти через балочный замедлитель 10. Во избежание соответствующих производственных ограничений при одновременно наилучшей возможной точке воздействия тормозных балок 20, 21 тормозные балки 20, 21 балочного замедлителя выполнены в виде вертикально подвижных тормозных элементов таким образом, что они оперты с возможностью вращения в точке 30 поворота. В изображенном на фиг.1 активном состоянии, т.е. в случае, когда тормозные балки 20, 21 принимают верхнее конечное положение, эти тормозные балки 20, 21 имеют при этом угол относительно горизонтали α=0°.
Чтобы сделать возможным надежное и одновременно сравнительно просто реализуемое определение или, соответственно, контроль текущего положения вертикально подвижных тормозных элементов в виде тормозных балок 20, 21, вагонный замедлитель 10 по примеру осуществления фиг.1 имеет, кроме того, сенсор 50 наклона. Этот сенсор позволяет собственно известным способом определять угол α наклона. Кроме того, сенсор 50 наклона может быть также выполнен в виде переключателя наклона, который в зависимости от текущего угла наклона, т.е. например, при превышении или, соответственно, недостижении некоторого заданного угла наклона совершает операцию переключения.
Соответственно изображению фиг.1, сенсор 50 наклона расположен не непосредственно на тормозных балках 20, 21, а на пакете 40 пружин. Это обеспечивает то преимущество, что предотвращается ухудшение функционирования тормозных балок 20, 21 и одновременно сенсор 50 наклона защищается от механических нагрузок или, соответственно, повреждений катящимися мимо колесами рельсовых транспортных средств.
На фиг.2 на схематичном эскизе показан вагонный замедлитель в соответствии с примером осуществления фиг.1 в неактивном состоянии. Это означает, что балочный замедлитель 10 на фиг.2, в отличие от фиг.1, показан с опущенными тормозными балками 20, 21. Соответственно изображению фиг.2, для этого тормозные балки 20, 21, из исходного изображения фиг.1, путем вращения вокруг точки 30 поворота переведены в опущенное положение. Кроме того, балочный замедлитель 10 на изображении фиг.2 полностью открыт, так что расстояние между тормозными балками 20, 21 по сравнению с фиг.1 увеличено.
В соответствии с изображением фиг.2, тормозные балки 20, 21, а также пакет 40 пружин в изображенной ситуации имеют угол α наклона, равный примерно 3,5°. На основании соответствующего значения измерения сенсора 50 наклона, таким образом, можно определить, что вертикально подвижные тормозные элементы в виде тормозных балок 20, 21 находятся в своем опущенном положении, т.е. в своем нижнем конечном положении. Таким образом, посредством сенсора 50 наклона сравнительно нетрудоемким образом обеспечивается возможность надежного определения текущего положения тормозных балок 20, 21.
Определение текущего положения тормозных балок 20, 21 может, с одной стороны, осуществляться самим сенсором 50 наклона. Когда сенсор 50 наклона выполнен в виде переключателя наклона, он может быть, например, реализован таким образом, чтобы начиная с угла наклона, равного 3°, совершалась операция переключения, чтобы сигнализировать о достижении нижнего конечного положения.
С другой стороны, существует также возможность, чтобы сенсор наклона был выполнен для передачи указанного по меньшей мере одного значения измерения устройству аналитической обработки. При этом соответствующее устройство аналитической обработки может быть выполнено или в качестве составной части вагонного замедлителя в виде балочного замедлителя 10, или же в качестве пространственно отделенного от него компонента, например, в виде одного из компонентов компонента устройства управления сортировочной горки, к которой принадлежит балочный замедлитель 10. В зависимости от соответствующих обстоятельств, при этом может осуществляться или проводная, или же беспроводная передача указанного по меньшей мере одного значения измерения от сенсора 50 наклона устройству аналитической обработки.
На фиг.3 на схематичном эскизе показан второй пример осуществления предлагаемого изобретением вагонного замедлителя в виде замедлителя 110 для компенсации уклона в активном состоянии. Замедлитель 110 для компенсации уклона имеет гидравлический тормоз или, соответственно, гидравлический тормозной цилиндр 120, который соединен с рельсом 100 посредством крепления 130.
В соответствии с изображением фиг.3, замедлитель 110 для компенсации уклона включает в себя также опускающее устройство 140, посредством которого гидравлический тормоз 120 из изображенного на фиг.3 положения, в котором замедлитель 110 для компенсации уклона активен, может переводиться в опущенное положение или, соответственно, положение гидравлического тормоза 120, в котором замедлитель 110 для компенсации уклона неактивен.
Чтобы теперь можно было надежно определять и контролировать положение вертикально подвижного тормозного элемента в виде гидравлического тормоза 120 при эксплуатации замедлителя 110 для компенсации уклона, замедлитель 110 для компенсации уклона имеет по меньшей мере один сенсор 150 наклона. Этот сенсор может, например, предусматриваться на опускающем устройстве 140, которое вследствие изменения своего наклона в зависимости от текущего положения гидравлического тормоза 120 позволяет делать заключение о текущем положении гидравлического тормоза 120. Как указано на фиг.3, при этом возможны различные места, в которых может альтернативно располагаться сенсор 150 наклона. Кроме того, возможно также, чтобы в обоих изображенных на фиг.3 положениях было предусмотрено по одному сенсору 150 наклона, и эти сенсоры независимо друг от друга для повышения безотказности и редундантности замедлителя 110 для компенсации уклона регистрировали значения измерений и передавали в устройство аналитической обработки и/или контроля.
На фиг.4 на схематичном эскизе показан вагонный замедлитель в соответствии с примером осуществления фиг.3 в неактивном состоянии. По сравнению с фиг.3 при этом ясно, что гидравлический тормоз 120 на фиг.4 опущен в такое положение или, соответственно, конечное положение, что катящиеся мимо колеса рельсовых транспортных средств проходят через замедлитель 110 для компенсации уклона без взаимодействия. Соответственно изображению фиг.4, сенсор 150 наклона позволяет или, соответственно, несколько сенсоров 150 наклона позволяют при этом вследствие связанного с этим изменения наклона опускающего устройства 140 по определенному наклону определять текущее положение вертикально подвижного тормозного элемента в виде гидравлического тормоза 120.
Соответственно приведенным выше рассуждениям, описанные примеры осуществления предлагаемого изобретением вагонного замедлителя, а также предлагаемого изобретением способа обладают, в частности, тем преимуществом, что посредством сенсора 50 или, соответственно, 150 наклона без трудоемких дополнительных конструктивных мер возможно надежное определение текущего положения соответствующего по меньшей мере одного вертикально подвижного тормозного элемента и вместе с тем также рабочего состояния данного вагонного замедлителя.
Реферат
Настоящее изобретение касается вагонного замедлителя (10; 100), снабженного по меньшей мере одним вертикально подвижным, в частности, опускаемым тормозным элементом (20, 21; 120). Вагонный замедлитель (10; 100) имеет сенсор (50; 150) наклона, который расположен таким образом, что на основании по меньшей мере одного значения измерения сенсора (150) наклона может определяться текущее положение указанного по меньшей мере одного вертикально подвижного тормозного элемента (20, 21; 120). Изобретение касается также способа определения текущего положения по меньшей мере одного вертикально подвижного, в частности, опускаемого тормозного элемента (20, 21; 120) вагонного замедлителя (10; 100). В результате положение вертикально подвижного тормозного элемента определяется простым и одновременно надежным образом. 2 н. и 26 з.п. ф-лы, 4 ил.
Формула
- посредством сенсора (50; 150) наклона регистрируется по меньшей мере одно измеренное значение, и
- по этому по меньшей мере одному измеренному значению определяется текущее положение вертикально подвижного тормозного элемента (20, 21; 120).
Комментарии