Двухступенчатая система торможения с электропневматическим управлением для многоосного дорожного транспорта - RU2405694C2
Код документа: RU2405694C2
Чертежи
Описание
Настоящее изобретение относится к двухступенчатой системе торможения с электропневматическим управлением для многоосного дорожного транспорта, а именно общественного транспорта.
Конкретное применение касается многоосного состава общественного транспорта на пневматических шинах с комплексом автоматического управления.
Дорожный общественный транспорт обычно имеет очень мощную систему торможения, позволяющую быстро останавливать его. В классическом варианте эта система представляет собой систему пневматического торможения, с пневматическим управлением. Такая система имеется в рыночном обращении и является вполне надежной и безопасной.
Однако в нормальных условиях эксплуатации, если водитель несколько резко воздействует на такую систему, транспортное средство также останавливается резко, что может вызвать большой дискомфорт для пассажиров, приведя к утрате ими равновесия, вплоть до падения.
Действительно, резкое торможение, помимо испуга пассажиров, бросает их вперед. Пассажиры, которые не прикреплены к своему сиденью, а часто даже стоят, могут при этом удариться о структурные элементы вагона и даже упасть. Такое торможение, следовательно, является источником многочисленных травм для пассажиров, как психологических, так и телесных.
Для того, чтобы избежать этих неприятностей, водитель постоянно должен заранее дозировать торможение, которым он управляет, и очень постепенно и осторожно воздействовать на орган управления торможением, обычно тормозную педаль. При классической системе торможения водителю довольно трудно обеспечить максимальный комфорт пассажиров за счет мягкого вождения без рывков, что требует больших усилий и внимания с его стороны.
Одна из целей изобретения состоит в создании системы торможения для общественного транспорта, которая обеспечивает постепенное и умеренное торможение, гарантируя комфорт и безопасность пассажиров. Такая постепенная система вполне осуществима в этом применении, тем более, что общественный транспорт, как правило, циркулирует по выделенным путям, т.е. без ограничений движения для других средств транспорта. Водитель при этом точно знает, где и когда его транспортное средство должно остановиться, и поэтому может заранее готовиться к операциям замедления и торможения.
Другим недостатком классической системы торможения с пневматическим управлением является ее большое время срабатывания. Действительно, в длинном составе, а именно в общественном транспорте из нескольких вагонов и, следовательно, с несколькими осями, передача пневматической команды вдоль всего состава требует определенного времени.
Если органы торможения, расположенные на первых осях, запускаются в ход вскоре после того, как водителем был дан сигнал о торможении, то органы, находящиеся на другом конце состава, приводятся в действие с довольно значительным опозданием. Такая ситуация уменьшает эффективность результирующего торможения, порождает неоднородное истирание органов торможения и приводит к неудовлетворительному динамическому поведению транспортного средства.
Другой целью изобретения является создание высокоэффективной системы торможения, которая характеризуется значительно более коротким временем срабатывания, а также более ограниченным и лучше распределенным истиранием органов торможения. Благодаря такой системе динамическое поведение состава оптимизировано так, чтобы как нельзя лучше обеспечить комфорт и безопасность пассажиров.
Тем не менее, в случае непредвиденной опасности неизбежной остается необходимость срочного торможения. В самом деле, хотя общественный транспорт обычно движется по выделенным путям, может случиться, что на пути внезапно появится пешеход, автомобиль или любое иное неожиданное препятствие, что потребует срочного торможения.
Такое срочное торможение должно быть абсолютно надежным и должно позволить остановить транспорт на очень коротком расстоянии, не причиняя слишком большого неудобства пассажирам.
Пневматическое торможение при пневматическом управлении является вполне надежным и безопасным. Система торможения, соответствующая данному изобретению, сохраняет этот вид торможения для реализации срочного торможения, смягчая его недостатки. Тем самым оно позволяет уменьшить время срабатывания и обеспечить высокую эффективность результирующего торможения.
Таким образом, для многоосного дорожного транспорта существует потребность в пневматической системе торможения, которая обеспечивала бы как постепенное и умеренное рабочее торможение, так и надежное и эффективное срочное торможение, при сохранении комфорта и безопасности пассажиров.
Для решения этой технической проблемы изобретение предлагает систему торможения с электропневматическим управлением для многоосного дорожного транспорта, содержащую для каждой оси модуль пневматического торможения, связанный с баком питания газом для привода тормозов, и включающую в себя исполнительные органы торможения.
В эту систему торможения входят следующие элементы:
- ручной орган, предпочтительно тормозная педаль двухступенчатого действия в соответствии с рабочим режимом и режимом быстрого торможения, которая приводится в действие водителем для начала процесса торможения, и положение которой определяет интенсивность затребованного торможения;
- пропорциональный электромагнитный клапан EVP для каждого тормозного модуля, который при воздействии на ручной орган воспринимает электрическую и/или пневматическую команду торможения и открытие которого, пропорциональное полученной команде (командам), устанавливает связь между исполнительными органами торможения и питающим баком, производя усилие торможения;
- по крайней мере, один блок управления замедлением UCD, который при воздействии на ручной орган получает информацию о положении этого органа и, исходя из этого положения, производит электрическую команду торможения, предназначенную для электрического управления открытием электромагнитных клапанов EVP;
- линия электрического управления для каждого тормозного модуля, образующая электрическую связь между блоком UCD и каждым из электромагнитных клапанов EVP и обеспечивающая передачу электрической команды;
- линия пневматического управления, образующая пневматическую связь между ручным органом и электромагнитными клапанами EVP и обеспечивающая передачу пневматической команды, производимой ручным органом, - только в режиме быстрого торможения.
Преимуществом является то, что блок UCD может также управлять электродинамическим торможением от двигателя транспортного средства, называемого также тормозным двигателем, при этом блок UCD предпочтительно выбирает тормозной двигатель, при необходимости дополняя или заменяя его пневматическим торможением, если действие первого оказывается недостаточным или неэффективным.
Другие характеристики и преимущества изобретения станут ясными из приводимого ниже описания, которое дается в качестве примера и сопровождается следующими чертежами:
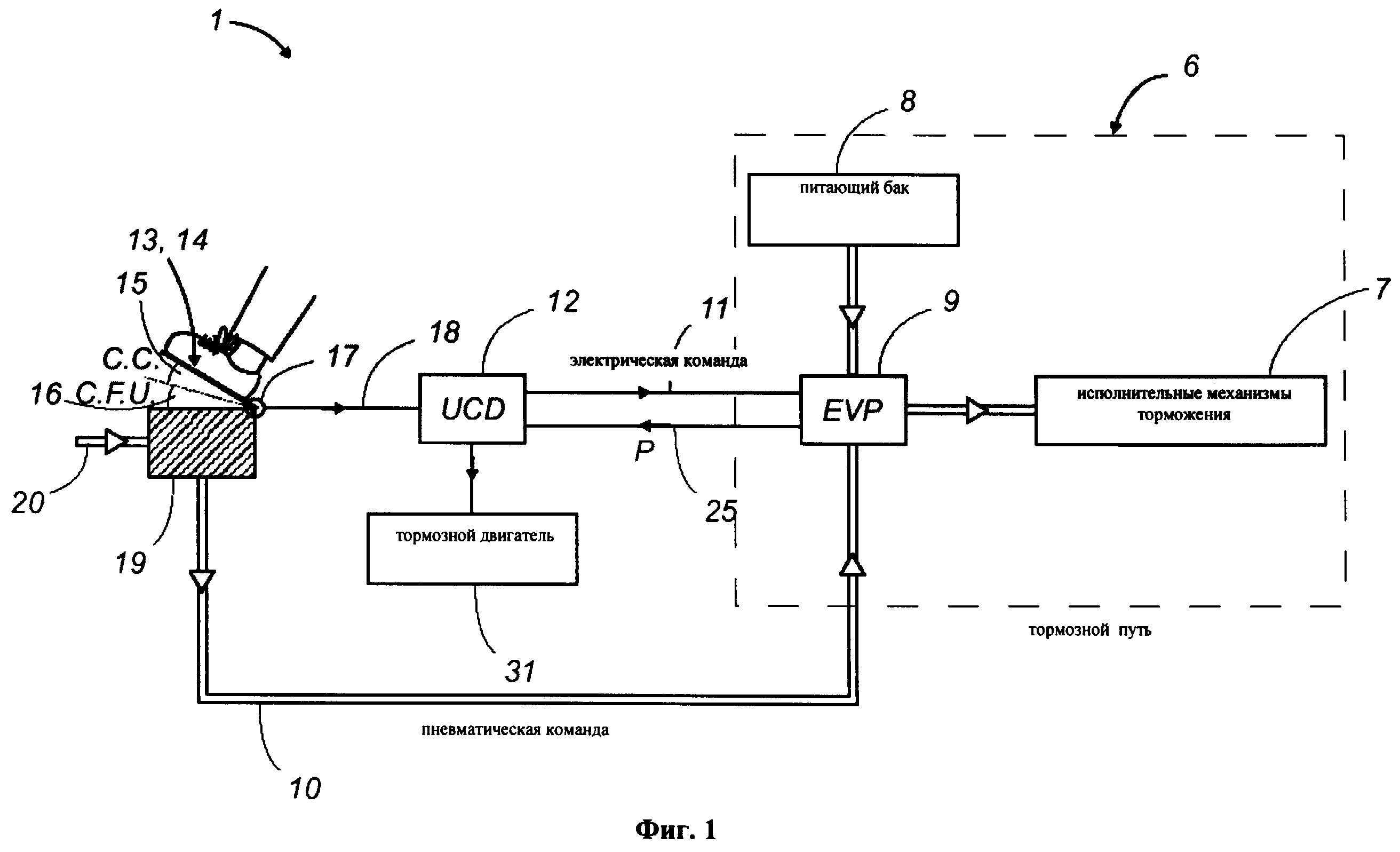
- фиг.1 - упрощенная функциональная схема основного модуля системы торможения, соответствующей изобретению;
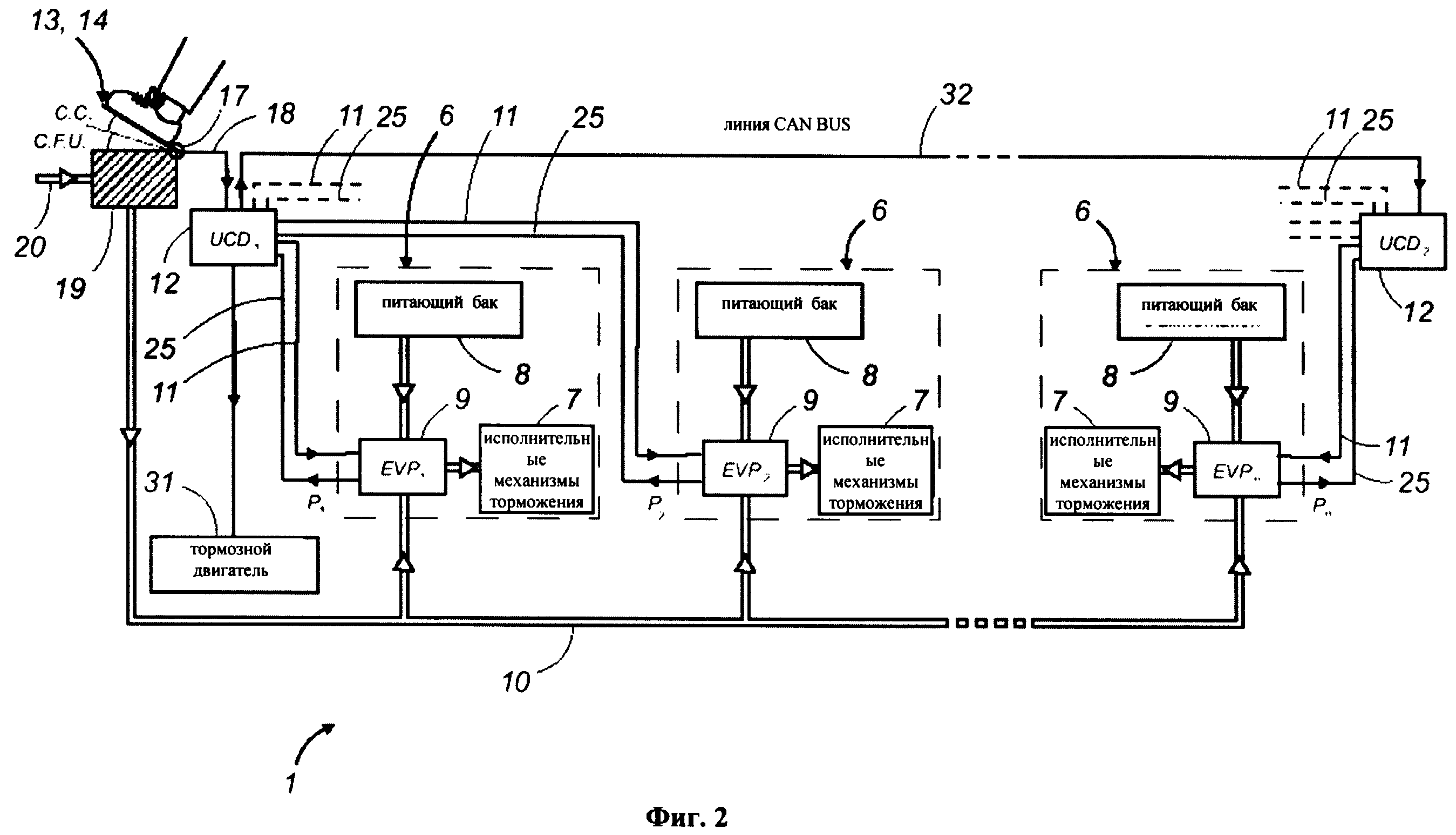
- фиг.2 - общая функциональная схема примера системы торможения, соответствующей изобретению, содержащей несколько тормозных модулей;
- фиг.3 - общая функциональная схема другого примера системы торможения по изобретению, содержащей три тормозных модуля и по одной тормозной педали на каждом конце транспортного средства;
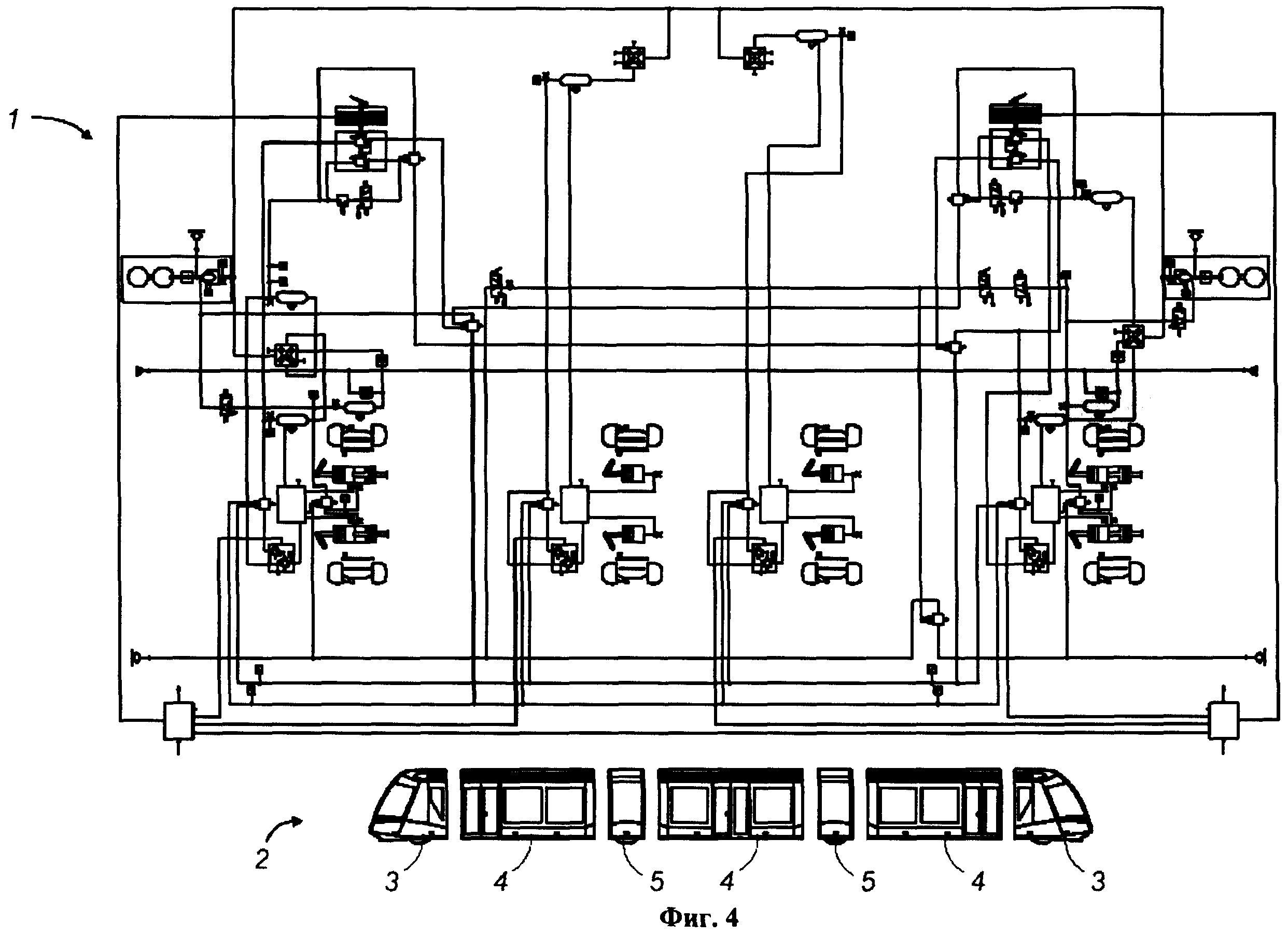
- фиг.4 - более полная электропневматическая схема, соответствующая другому примеру системы торможения по изобретению, содержащей четыре тормозных модуля и два блока управления замедлением;
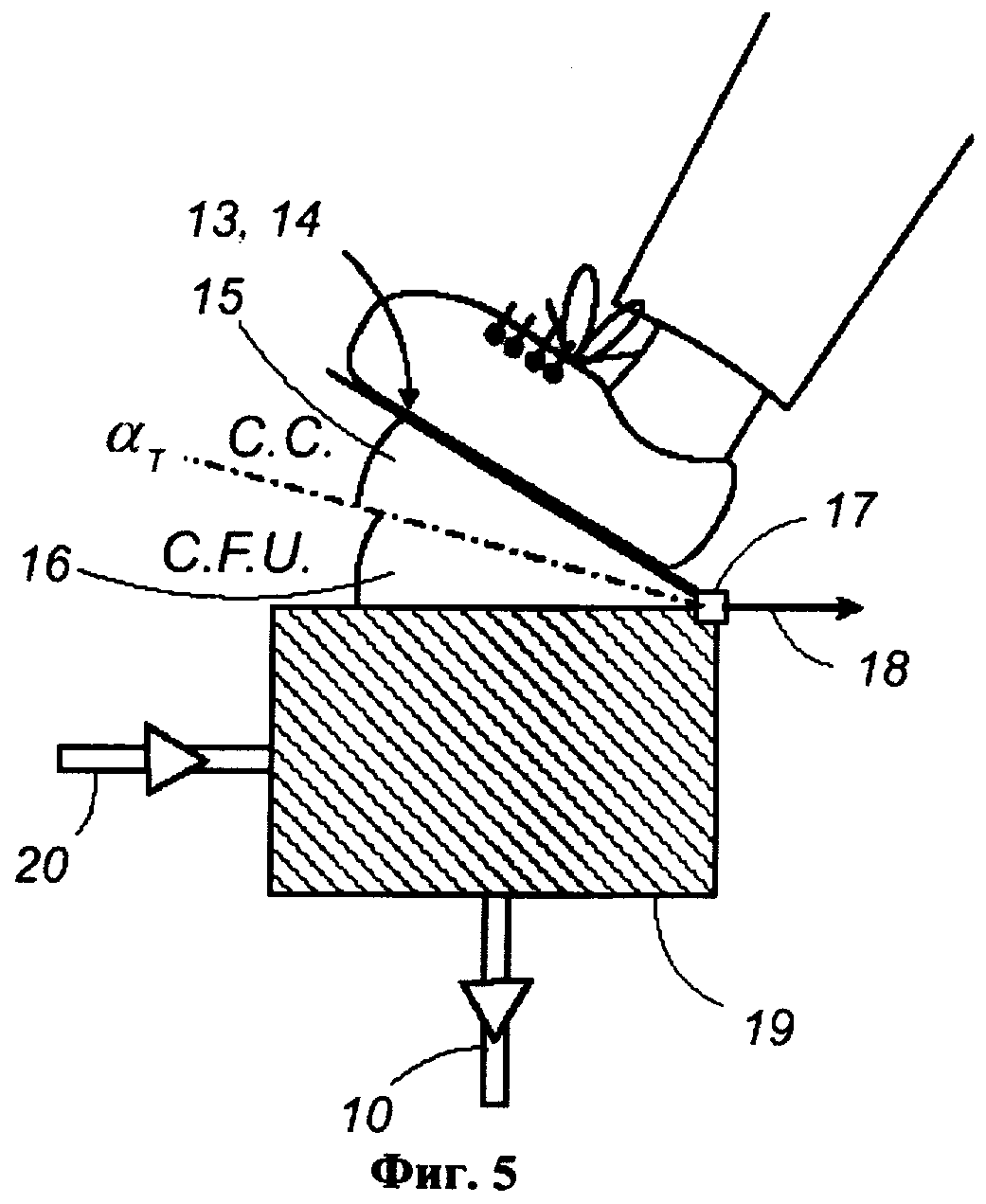
- фиг.5 - схематический вид тормозной педали;
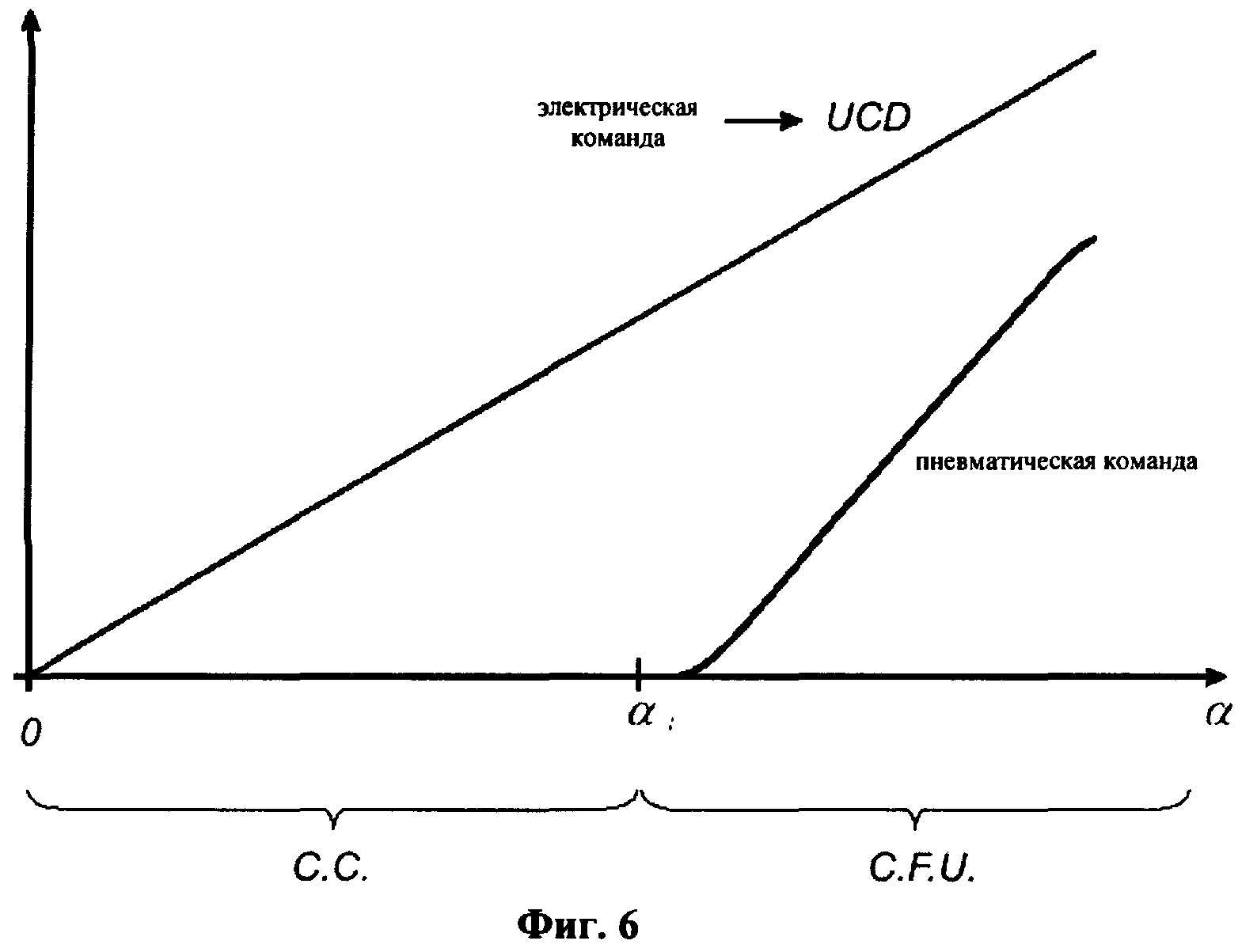
- фиг.6 - график, иллюстрирующий форму команды на уровне тормозной педали;
- фиг.7 - функциональная схема блока управления замедлением и его окружения;
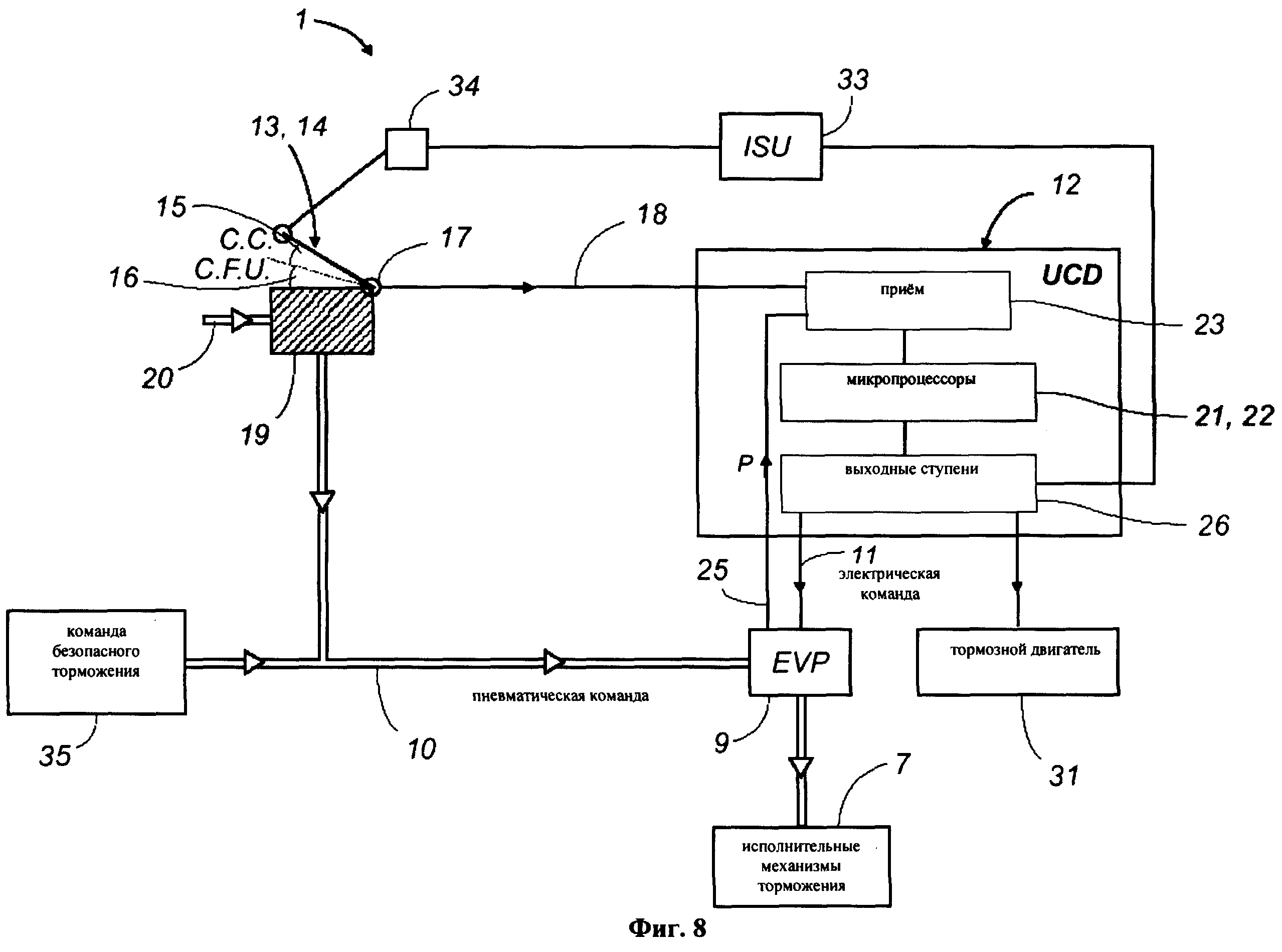
- фиг.8 - общая функциональная схема примера основного модуля системы торможения по изобретению, оборудованного дополнительным предохранительным устройством типа схемы запрета на выходе UCD.
Далее система торможения, соответствующая настоящему изобретению, описывается более детально со ссылкой на фиг.1÷8. Эквивалентные элементы, представленные на различных фигурах, имеют одни и те же числовые обозначения.
Настоящее изобретение относится к системе торможения с электропневматическим управлением для многоосного дорожного транспорта с шарнирным сочленением, а именно для общественного транспорта. Разумеется, такое применение является только примером, и возможны другие применения для многоосного наземного транспорта.
Как можно видеть на фиг.3 и 4, система торможения 1 по данному изобретению предназначена, более конкретно, для установки на вагонном составе 2 предпочтительно дорожного и многоосного общественного транспорта. Этот состав 2 образован несколькими дорожными модулями, шарнирно сочлененными между собой, в число которых входит, по крайней мере, один головной модуль 3, и одним или несколькими вагонами, предназначенными для перевозки пассажиров и ведомыми промежуточными модулями, такими как 5, каждый из которых имеет ось.
В классическом исполнении состав 2 включает в себя предпочтительно по одному головному модулю 3 на каждом конце состава, что позволяет ему двигаться поочередно в двух направлениях, не совершая круговой поворот.
Согласно изобретению каждая ось оборудована модулем или узлом пневматического торможения 6.
Каждый тормозной модуль 6 содержит комплекс классических устройств пневматического торможения, воздействующих на диски или иные поверхности, входящие в состав колес. Эти устройства содержат пневматические исполнительные механизмы торможения 7 и воздействуют одновременно на каждое из двух колес оси под действием движущей пневматической энергии запаса газа для привода тормозов, подаваемого из питающего бака 8, причем этот газ предпочтительно является сжатым воздухом.
Предпочтительно каждый тормозной модуль 6 независимо соединен с баком 8, подающим приводной газ на тормоза и расположенным предпочтительно на крыше соответствующего вагона 4. Таким образом, каждый тормозной модуль 6 не зависит от других в том, что касается его пневматической энергии, что позволяет изолировать модуль в случае утечки или неисправности.
Однако вполне можно представить себе и использование общего питающего бака для всего комплекса тормозных модулей 6, либо нескольких баков, распределенных на составе 2 и питающих один или несколько тормозных модулей 6.
Эти баки 8 предпочтительно заполнены сжатым воздухом, поступающим от генератора, общего или нет.
Предпочтительно один или несколько из этих тормозных модулей 6 содержит (содержат) также известные предохранительные органы, такие как, например, систему против скольжения, против засорения колес, симметрии колес, компенсации нагрузки, модулирующей усилие торможения в зависимости от веса оси, и любую другую уместную систему. Эти предохранительные органы предпочтительно сгруппированы в блок контроля и стабилизации торможения, который предпочтительно составляет часть органов 7, воздействуя на устройства торможения каждой оси посредством бака сжатого воздуха 8 и команды на торможение.
В соответствии с важной характеристикой изобретения каждый из этих тормозных модулей 6 содержит также пропорциональный электромагнитный клапан 9 (EVP). Когда имеется несколько пропорциональных электромагнитных клапанов (и, следовательно, несколько тормозных модулей 6), они обозначаются EVP1, EVP2,…, EVPn.
Каждый пропорциональный электромагнитный клапан 9 каждого тормозного модуля 6, установленный на каждой из осей, получает сжатый воздух непосредственно от соответствующего питающего бака 8 и дает пневматическую команду предпочтительно через посредство соответствующего блока контроля и стабилизации торможения, реализуя тем самым процесс торможения.
Как будет видно ниже, этот процесс имеет две разновидности - рабочее торможение и срочное торможение.
Открытие пропорционального электромагнитного клапана 9, от которого зависит интенсивность результирующего торможения, является функцией команды на торможение, полученной пропорциональным электромагнитным клапаном 9.
Согласно изобретению каждый пропорциональный электромагнитный клапан 9 может получать два вида команды на торможение: пневматическую команду, созданную изменением пневматического давления, поступающего из классической линии пневматического управления 10 используемого комплекса пневматического торможения, и электрическую команду от линии электрического управления 11, поступающую от блока управления замедлением UCD 12.
Для того, чтобы начать процесс торможения, система торможения 1 по данному изобретению содержит ручной орган 13, расположенный на рабочем месте водителя, который приводит в действие этот орган, чтобы дать команду (команды) на торможение.
Согласно представленному примеру этот ручной орган 13 предпочтительно представляет собой тормозную педаль 14, которая предназначена для приведения в действие водителем и положение которой управляет торможением.
Эта тормозная педаль 14 является особенной, так как она содержит две ступени функционирования в соответствии с двумя режимами торможения. Первый режим - это режим замедление-торможение, называемый рабочим торможением и пригодный для обычного использования в общественном транспорте. Он соответствует, например, первому угловому сектору 15 заглубления педали 14, называемому комфортной длиной хода (СС).
Второй режим - это режим срочного торможения и соответствует, например, второму угловому сектору 16 заглубления педали 14, называемому длиной хода срочного торможения (CFU).
Тормозная педаль 14 может быть заменена иным ручным органом 13, например, приводимым рукой, каким-либо исполнительным механизмом, одним или несколькими датчиками положения или любым другим подходящим средством.
Преимуществом является то, что, когда ручной орган 13 представляет собой педаль 14, такую, какая представлена на фиг.5, водитель может очень легко и тем же движением перейти из одного режима торможения в другой, просто еще больше заглубляя педаль.
Две ступени функционирования педали предстают перед водителем всего лишь разницей в крутизне педали, «жесткой точкой», которая указывает преимущественно зону перехода αТ между двумя секторами и, следовательно, между двумя режимами торможения. Это указание при необходимости может быть дополнено любым другим подходящим средством сигнализации, например свечением на табло, либо звуковым или визуальным сигналом.
Тормозная педаль 14 представляет собой механический исполнительный механизм, который включает в себя электрическую ступень и пневматическую ступень зарождения и передачи команды, соответствующей двум режимам торможения.
На первом этапе длины хода педали 14, соответствующей первому угловому сектору 15, линия пневматической команды 10 не получает питания.
Положение ручного органа 13, предпочтительно педали 14, детектируется одним или несколькими датчиками положения 17, предпочтительно электронными датчиками углового положения или величиной функции этого углового положения. Результирующая информация, относящаяся к этому положению, передается на блок UCD 12 посредством электрической связи 18.
На втором этапе длины хода, который соответствует второму угловому сектору 16, в действие приводится пневматическая коробка 19 пропорционально заглублению педали 14, что порождает пневматическую команду, реализуемую под действием сжатого воздуха, поступающего из питающего канала 20 и посылаемого на линию пневматического управления 10 к тормозным модулям 6 и их пропорциональным электромагнитным клапанам 9. Усилие торможения, передаваемое колесам от исполнительных механизмов торможения 7, будет при этом пропорционально данной пневматической команде.
Как это можно видеть на графике фиг.6, на протяжении комфортной длины хода СС, соответствующей первому угловому сектору 15, на блок UCD 12 посылается только электрическая информация, преобразующая заглубление педали.
Начиная с угла αТ, осуществляется переход во второй угловой сектор 16 и, следовательно, в режим срочного торможения. При этом пневматическая команда, передаваемая линией пневматического управления 10 на пропорциональные электромагнитные клапаны 9, накладывается на предшествующую электрическую информацию, предназначенную для блока UCD 12.
Значение αТ является неким угловым значением, подходящим для рассматриваемого применения, и может быть, например, порядка 10°.
Блок управления замедлением UCD 12 представляет собой вычислительное устройство, которое управляет пропорциональными электромагнитными клапанами EVP 9 в зависимости от электрической информации о положении педали 14, получаемой датчиками положения 17.
Согласно предпочтительному способу реализации изобретения блок обладает также другими регулировочными функциями, особенно благоприятными.
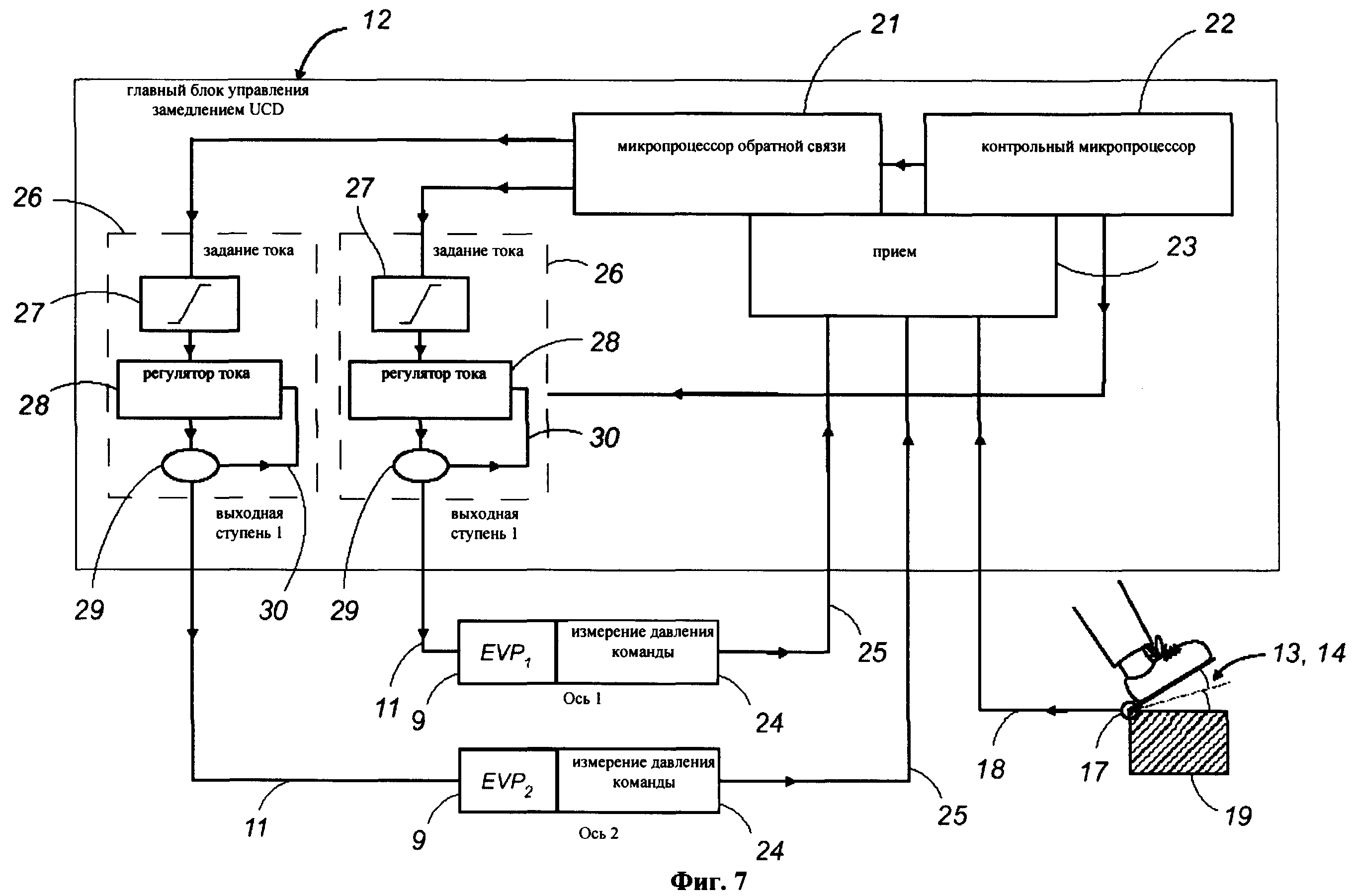
На фиг.7 этот блок иллюстрируется более полно. Здесь представлена функциональная схема блока UCD, показывающая его основные функциональные узлы.
Речь идет о центральном электронном блоке, предназначенном для пропорционального замедления на длине хода педали 14 путем управления электродинамическими и пневматическими системами торможения. Функциональные данные или данные, поданные на диагностику, такие как, например, скорость транспортного средства, давление в пневматической системе и/или давление, переданное электромагнитными клапанами EVP 9 на исполнительные механизмы торможения 7, могут быть заменены на различные системы контроля/управления транспортным средством.
Согласно представленному предпочтительному способу реализации блок UCD 12 содержит два микропроцессора: микропроцессор обратной связи 21, который вычисляет посылаемую команду (команды) электрического торможения, и микропроцессор контроля 22, который, ради безопасности, контролирует хорошую работу микропроцессора обратной связи 21.
Эти два микропроцессора находятся в связи с приемной ступенью 23, образующей входную ступень блока UCD. Приемная ступень получает сигналы, соответствующие входным значениям UCD, и преобразует их в электронные сигналы, подходящие для микропроцессоров.
Приемная ступень 23 получает также электрический сигнал, поступающий от датчика (датчиков) положения 17, отражающих положение педали 14. Она может также получать сигналы, поступающие от контуров обратной связи, а именно измерение давления, выполняемое одним или несколькими датчиками 24, установленными на электромагнитных клапанах EVP 9 или после них, и передаваемое через электрическую связь 25.
В зависимости от входных данных микропроцессор обратной связи 21 вычисляет команды торможения для посылки на различные тормозные модули 6 и направляет их на выходные ступени 26.
Микропроцессор контроля 22 проверяет и оценивает то, что делает микропроцессор обратной связи 21. Если он обнаруживает аномалию или неисправность, он может воздействовать и/или блокировать одну или несколько выходных ступеней 26. Кроме того, он может затребовать повторную инициализацию и повторный запуск микропроцессора обратной связи 21.
Блок UCD 12 содержит, по крайней мере, одну выходную ступень 26, а предпочтительно столько выходных ступеней 26, сколько имеется тормозных модулей 6 для управления транспортным средством, т.е. столько же, сколько есть пропорциональных электромагнитных клапанов EVP 9 для создания команд.
В представленном примере показаны две выходных ступени 26, соответствующих двум электромагнитным клапанам EVP 9. Этот пример, однако, не является абсолютно ограничительным.
Каждая из выходных ступеней 26 предпочтительно управляется независимо и поэтому может посылать разные значения команд на каждый электромагнитный клапан EVP 9. Тем самым реализуется различное торможение на каждой из осей, что может составлять преимущество по различным техническим соображениям, например, когда не все оси идентичны или функционируют не одинаково, или когда органы торможения дают разную степень износа для разных осей.
Такая независимость позволяет также микропроцессору обратной связи 21 компенсировать возможную неисправность одного или нескольких тормозных модулей 6, перенося команду торможения на другие модули, с тем, чтобы произвести, несмотря ни на что, эффективное общее торможение транспортного средства.
Предпочтительно датчик давления 24, расположенный на или после каждого электромагнитного клапана EVP 9, посылает величину измеренного давления на блок UCD, а конкретно на его приемную ступень 23 через электрическую линию 25. Тем самым реализуется обратная связь по давлению, позволяющая микропроцессору обратной связи 21 контролировать реально производимое торможение, чтобы скорректировать его к значению затребованной команды, причем соотношение между током и давлением не очень стабильно. Такая обратная связь позволяет также обнаружить возможную неисправность на уровне электромагнитного клапана EVP 9 или его питания.
Каждая выходная ступень 26 предпочтительно содержит фильтр ограничения скачков 27, умеряя рывки и позволяя получить на выходе заданное значение тока с мягким наклоном, которое следует за регулятором тока 28, создающим затребованный ток, чтобы генерировать рассчитанную электрическую команду, и посылает его на линию электрического управления 11.
За этим регулятором тока 28 предпочтительно следует датчик тока 29, реализуя контур обратной связи по току 30, чтобы скорректировать производимый ток к заданному значению.
Основной модуль системы торможения 1 по данному изобретению в целом представлен схематически на фиг.1.
Он включает в себя педаль 14, ее электронный детектор положения 17, пневматическую коробку 19, линию пневматического управления 10, блок управления замедлением UCD 12, линию электрического управления 11 и пропорциональный электромагнитный клапан EVP 9.
Ниже описывается функционирование системы торможения по данному изобретению для этого основного модуля.
Режим рабочего торможения
Этот режим существует на всей комфортной длине хода СС педали 14, соответствующей заглублению педали, ограниченному угловым сектором 15.
В этом секторе пневматическая коробка 19 педали не действует, и линия пневматического управления 10 не получает питания.
На блок UCD 12 поступает сигнал или информация, исходящая от датчиков 17, сообщая ему степень заглубления педали 14.
UCD при этом дает команду на торможение за счет электрического управления электродинамическим торможением и электропневматическим торможением.
Для реализации затребованного торможения блок UCD 12 отдает предпочтение электродинамическому торможению двигателями транспортного средства, т.е. тормозным двигателем 31. Этот вид торможения обладает тем преимуществом, что не производит истирания органов торможения. Кроме того, он позволяет при необходимости прибегнуть к рекуперации электрической энергии, возвращая ее в контактную сеть или используя для подзарядки имеющихся аккумуляторных батарей.
Если электродинамическое торможение ослабело или оказалось недостаточным, либо непригодным, например, когда скорость слишком мала или в случае уклона, блок UCD 12 заменяет или предпочтительно дополняет его электропневматическим торможением.
Для этого он управляет открытием пропорционального электромагнитного клапана EVP 9, посылая ему электрическую команду через линию электрического управления 11. Пропорциональный электромагнитный клапан EVP 9 подает при этом воздух под давлением на исполнительные механизмы торможения 7, так чтобы завершить торможение и получить замедление, затребованное водителем.
Блок UCD 12 автоматически вводит использование тормозного двигателя, от пневматического торможения или от двух видов торможения одновременно. Преимущество состоит в том, что выбор и/или дозирование делаются автоматически, и система полностью прозрачна для водителя.
Кроме того, блок UCD 12 производит постепенное торможение, оптимизированное для гарантии максимального комфорта пассажиров. Для этого блок UCD 12 может содержать, как уже упоминалось, фильтрующие компоненты, ограничивающие толчки и запрошенную крутизну торможения, что позволяет обеспечить мягкое и комфортное вождение. Таким образом, система торможения по данному изобретению оказывает водителю настоящую помощь в вождении.
В рабочем режиме все команды на торможение передаются электрическим путем. Поэтому время срабатывания системы торможения, от нажатия педали 14 до реализации торможения, оказывается очень коротким.
Режим срочного торможения
В нормальных условиях эксплуатации транспортного средства, т.е. в нормальных условиях дорожного движения, вождения и функционирования, режим срочного торможения не используется, водитель производит замедление и остановку транспорта с максимальным комфортом для пассажиров, используя рабочее торможение, описанное выше.
Однако по соображениям безопасности необходимо предусмотреть также дополнительную возможность торможения, называемого срочным торможением. Оно осуществляется на всей длине хода срочного торможения CFU, идущего вслед за комфортной длиной хода СС.
Такое срочное торможение необходимо, когда непредвиденная причина вынуждает водителя прибегнуть к более быстрому и более эффективному торможению, чем рабочее торможение, например, при появлении на пути неожиданного препятствия или при неисправности системы рабочего торможения, а именно блока UCD 12.
По эксплуатационным соображениям лучше предусмотреть устройство регистрации перехода в режим срочного торможения, вступающего в действие с конца режима срочного торможения при прохождении «жесткой» точки, соответствующей граничной зоне перехода между двумя ступенями, обозначенной на фигурах углом αТ.
Благодаря этой регистрации анализ причин использования срочного торможения может быть проведен «постериори», и возможная неисправность рабочего торможения может быть выявлена и устранена.
Режим срочного торможения должен быть абсолютно надежным и безопасным. По этой причине в нем используется классическое устройство пневматического торможения, с пневматическим управлением, которое отвечает этим критериям. Кроме того, оно должно быть быстрым и эффективным. Система торможения по данному изобретению позволяет улучшить эти последние характеристики.
Срочное торможение находится в некоторой области угловых отклонений педали 14, соответствующей здесь угловому сектору 16.
В этом диапазоне педаль 14 производит, с одной стороны, электрическую команду через блок UCD 12 и электрическую связь 18 и 11, а с другой стороны, пневматическую команду, идущую по линии пневматического управления 10.
Пневматическая команда, надежная и безопасная, запускает открытие пропорционального электромагнитного клапана EVP 9 и, следовательно, пускает в ход исполнительные механизмы торможения 7.
По соображениям безопасности линия пневматического управления 10 может быть дублирована. При этом пневматическая команда может, например, достигнуть электромагнитного клапана EVP 9, проходя через двойное реле клапана, которое передает команду более высокой интенсивности.
Чтобы улучшить время срабатывания системы срочного торможения, электрическая команда, значительно более быстрая, достигает также блока UCD 12. Последний сразу включает электрическое торможение от тормозного двигателя 31, если ситуация это позволяет, и электропневматическое торможение, посылая быструю электрическую команду через линию электрического управления 11 на электромагнитный клапан EVP 9.
Блок UCD 12 по-прежнему управляет электрическим торможением, поддерживая электропневматическую команду до момента, когда величина пневматической команды постепенно заменит электродинамическое торможение.
Даже на этой длине срочного хода CFU блок UCD 12 участвует в дозировании торможения и присоединяет по внутреннему закону значение электрической команды в зависимости от конечного давления торможения, чтобы получить и учесть команду пневматического давления торможения, поступившую на пропорциональный электромагнитный клапан EVP 9. Тем не менее, и ни в коем случае, блок UCD 12 не может через линию электрического управления 11 уменьшить торможение, управляемое линией пневматического управления 10.
Наложение и взаимодействие этих двух команд в электромагнитном клапане EVP 9 обеспечивает постепенное, почти немедленное торможение и оптимальную эффективность.
Чтобы улучшить надежность системы торможения по данному изобретению, к нему можно присоединить дополнительное предохранительное устройство, которое показано схематически на фиг.8 и которое позволяет блокировать в определенных ситуациях, по крайней мере, выход из блока управления замедлением 12 с помощью средства, называемого схемой запрета выхода из UCD или ISU 33.
Как указывалось выше, блок UCD представляет собой электронный блок, полностью управляемый программным обеспечением. Естественно, он не может быть абсолютно надежным, несмотря на принятые меры предосторожности, как, например, использование контрольного микропроцессора 22.
В случае неисправности блок UCD 12 мог бы генерировать нежелательные задания торможения и вызвать тем самым несвоевременное торможение, которое может оказаться опасным.
Действительно, если блок управления замедлением 12 генерирует важное задание торможения, которое не было запрошено, он может вызвать резкое замедление транспорта, которое будет очень неудобно для пассажиров и даже может повлечь за собой риск падения или ранения.
С другой стороны, если блок UCD 12 генерирует задание торможения слабой интенсивности, но большой длительности, он может вызвать незначительное торможение, которое пройдет не замеченным для водителя. Такое торможение, при его непрерывности, способно вызвать разогрев органов торможения, что может стать пожароопасным.
Преимуществом является то, что схема 33 запрета выхода из UCD позволяет отсечь питание одной или нескольких выходных ступеней 26 блока UCD 12. Поэтому в случае неисправности блока UCD 12, даже если микропроцессоры 21 и 22 генерируют несвоевременные задания торможения, они не будут преобразованы в электрические команды торможения, посылаемые на электромагнитный клапан EVP 9 через линию электрического управления 11.
Для этого данная дополнительная система безопасности содержит датчик 34, который определяет, воздействует ли водитель на ручной орган 13, предпочтительно педаль 14.
Датчик 34 выполняет также функцию электрического выключателя, который находится в одном из двух состояний в зависимости от выявленного положения ручного органа 13.
Первое состояние выключателя соответствует положению покоя ручного органа 13, т.е. положению, в котором находится ручной орган 13, когда водитель транспортного средства не требует никакого торможения.
Как только ручной орган 13 выходит из состояния покоя, выключатель переходит в свое второе состояние. Это второе состояние соответствует активной позиции ручного органа 13, по которому водитель запрашивает торможение, какова бы ни была интенсивность затребованного торможения.
Этот датчик 34 связан со схемой запрета выхода из UCD или ISU 33 и своим электрическим состоянием передает ей информацию о положении ручного органа 13.
В зависимости от состояния, в котором находится выключатель, схема запрета выхода из UCD или ISU 33 отсекает или разрешает электропитание выходных ступеней 26 блока UCD 12.
Пока выключатель находится в своем первом состоянии, соответствующем состоянию покоя ручного органа 13, ISU 33 препятствует питанию выходных ступеней 26 блока UCD 12. Благодаря этому, даже если микропроцессоры генерируют нежелательные задания из-за неисправности блока UCD 12, никакая электрическая команда на торможение не может достигнуть электромагнитного клапана EVP 9 в отсутствие запроса на торможение со стороны водителя.
Таким образом, система торможения, соответствующая данному изобретению, является полностью безопасной.
Когда водитель воздействует на ручной орган 13 для запроса торможения, выключатель датчика 34 переходит в свое второе состояние, и ISU 33 восстанавливает питание выходных ступеней 26 блока UCD 12. Блок UCD 12 может тогда послать на электромагнитный клапан EVP 11 электрическую команду торможения, действующую согласно вышеописанному принципу.
Предпочтительно схема 33 запрета выхода из UCD также восстанавливает питание выходных ступеней 26 блока UCD 12, когда транспорт остановлен.
Различные варианты этого устройства легко можно себе представить.
Например, датчик 34 может быть независимым или объединенным с датчиком положения 17 ручного органа 13, и в последнем случае он служит для передачи на приемную ступень 23 блока UCD 12 через линию 18 информации о положении ручного органа 13.
Согласно другому допустимому варианту функция выключателя может быть отделена от датчика 34. В этом случае должен быть добавлен независимый выключатель.
С другой стороны, датчик 34 может быть независимым или интегрированным в схему 33 запрета выхода из UCD. Точно также схема ISU 33 может быть отделена или интегрирована в блок UCD 12.
Согласно другому предпочтительному способу реализации изобретения схема 33 запрета выхода из UCD может контролировать только питание выходных ступеней 26 блока UCD 12, связанных с одним или несколькими электромагнитными клапанами EVP 9, но не выходную ступень, управляющую тормозным двигателем 31.
Таким образом, схема ISU 33 блокирует процессы торможения, которые могут быть опасными, но не безопасное электродинамическое торможение тормозным двигателем 31. Благодаря этому есть возможность сохранить функции автоматического торможения тормозным двигателем, как, например, автоматическое торможение перед поворотами, если скорость транспортного средства слишком велика.
Эти функции, не запрашиваемые водителем, должны выполняться, даже если ручной орган 13 находится в положении покоя и, следовательно, когда схема ISU 33 отсекает питание выходных ступеней 26 блока UCD 12, связанных с электромагнитными клапанами EVP 9.
Помимо положения ручного органа 13 и другие условия могут ввести в действие схему 33 запрета выхода из UCD и этим вызвать подачу или отключение напряжения от одной или нескольких выходных ступеней 26 блока UCD 12.
Одним из этих условий является наличие команды безопасного торможения 35. При некоторых обстоятельствах, например, в случае открытия одной из дверей транспортного средства, отслоения системы вождения, недомогания водителя или ручного пуска устройства срочного останова, в систему торможения посылается команда безопасного торможения 35. Результирующее торможение должно быть абсолютно надежным, и с этой целью используется пневматическая команда торможения.
Для того, чтобы еще больше повысить надежность системы, устройство ISU 33 отсекает питание выходных ступеней 26 блока UCD 12, когда затребовано безопасное торможение, с целью разрешить работу только абсолютно надежному устройству пневматического торможения, с пневматическим управлением, гарантируя тем самым максимальный уровень требуемой безопасности.
Специалисту легко представить другие варианты этого предохранительного устройства, и в частности, например, устройство ISU 33, контролирующее питание блока UCD 12 в целом, а не только одной или нескольких из его выходных ступеней 26.
Система торможения по данному изобретению может быть успешно использована на транспортном средстве с несколькими осями, например, на многоосном дорожном составе 2 общественного транспорта, как показано в качестве примера на фиг.2-4.
В таком применении система торможения по данному изобретению включает в себя несколько тормозных модулей 6, предпочтительно по одному на ось, каждый из которых содержит пропорциональный электромагнитный клапан EVP 9, связанный с питающим баком, общим или независимым, и с исполнительными механизмами торможения 7.
Электромагнитный клапан EVP 9 каждого из этих тормозных модулей 6 пневматически соединен с пневматической коробкой 19 педали 14 через линию пневматического управления 10, единственную или продублированную, и в последнем случае она предпочтительно содержит, по крайней мере, одно двойное реле.
Он также соединен электрически с блоком UCD 12 линией электрического управления 11, отдельной для каждого электромагнитного клапана EVP 9. Каждый электромагнитный клапан EVP 9 предпочтительно соединен с блоком UCD 12 другой отдельной электрической связью 25, позволяющей реализовать обратную связь по давлению, описанную выше.
Работа этих тормозных модулей 6 напоминает работу основного модуля, подробно описанную выше, причем блок UCD 12 может, кроме того, независимо управлять работой каждого из этих модулей 6, чтобы сделать общий процесс торможения наиболее приспособленным и наиболее эффективным.
Когда транспортное средство является протяженным и содержит много тормозных модулей 6, пневматическая команда требует относительно длительного времени, чтобы пройти вдоль линии пневматического управления 10, от одного до другого конца состава. Проблема времени срабатывания становится при этом критической.
С точки зрения удовлетворительной реакции на эту проблему система торможения по данному изобретению становится особенно выгодной в таких областях применения. Действительно, блок UCD 12 посылает электрическую команду, которая распространяется быстро, на все пропорциональные электромагнитные клапаны EVP 9, действующие одновременно и значительно быстрее, чем пневматическая команда. Пневматическая команда постепенно добавляется к электрической команде по мере ее поступления. Эффективность торможения от этого оказывается значительно выше, а истирание органов торможения лучше распределенным.
Для ограничения числа электрических связей, выходящих и заканчивающихся на блоке UCD 12, можно выгодно использовать несколько блоков UCD 12, - обозначим их UCD1, UCD2,…, - распределенных вдоль состава 2. Действительно, между блоком UCD 12 и каждым пропорциональным электромагнитным клапаном EVP 9 должна существовать двойная электрическая связь 11 и 25. Эти блоки управления замедлением UCD предпочтительно связаны между собой электрической линией BUS 32, функционирующей, например, по протоколу CAN.
Предпочтительно используются два блока UCD 12, установленных на каждом конце транспортного средства. Блок UCD1, расположенный в головной части состава 2, получает данные от педали 14 и служит предпочтительно главным блоком. Он непосредственно управляет первой половиной тормозных модулей 6, расположенной в передней части транспортного средства.
Второй блок UCD2 является подчиненным блоком, который получает инструкции от главного блока UCD1 предпочтительно через посредство линии BUS 32, функционирующей, например, по протоколу CAN. Он управляет второй половиной тормозных модулей 6, расположенной в задней части транспортного средства.
Распределение тормозных модулей 6 между блоками UCD 12 может, тем не менее, быть другим, в зависимости от различных технических ограничений, свойственных каждому применению.
Состав общественного транспорта часто содержит головной модуль 3 на каждом из своих концов, чтобы иметь возможность двигаться в двух направлениях, не совершая круговой поворот. На каждом из этих головных модулей 3 имеется место водителя с тормозной педалью 14.
Как показано на фиг.3, система торможения по данному изобретению может, таким образом, обладать тем преимуществом, что содержит блок UCD 12 в каждом головном модуле, получающем данные от педали 14, касающейся и связанной с другим блоком UCD, предпочтительно линией BUS 32, функционирующей, например, по протоколу CAN.
В этом случае два блока UCD 12 идентичны и могут играть, поочередно один для другого, роль главного или подчиненного блока, в зависимости от используемого места водителя.
На приведенных примерах показаны два блока UCD, но можно представить случай одного блока, трех блоков и более.
Согласно предпочтительному способу реализации изобретения один из этих блоков управления замедлением UCD 12 получает информацию о положении ручного органа 13 и служит главным блоком для других блоков UCD 12, которые являются подчиненными.
Благодаря этому допустимо, например, использовать один упрощенный блок UCD на один тормозной модуль 6 и, следовательно, на ось, причем эти подчиненные микро-блоки UCD служат интерфейсом между главным блоком UCD 12, получающим данные, касающиеся положения ручного органа 13, и каждым из пропорциональных электромагнитных клапанов EVP 9.
Очевидно, что изобретение не ограничивается предпочтительными способами реализации, описанными выше и представленными на различных фигурах, и специалист может внести в него многочисленные модификации и представить себе другие варианты, не выходя за объем и рамки изобретения.
Реферат
Изобретение относится к области автомобилестроения. Тормозная система содержит тормозную педаль, пневматические тормозные модули, блок управления замедлением и цепь пневматического управления. Две ступени тормозной педали соответствуют рабочему режиму и режиму срочного торможения. Пневматические тормозные модули предназначены для каждой оси, и каждый из них содержит пропорциональный электромагнитный клапан. Блок управления замедлением получает информацию от педали в соответствии с ее положением и электрически контролирует тормозной двигатель и/или пропорциональный электромагнитный клапан в рабочем режиме или режиме срочного торможения. Цепь пневматического управления действует только в режиме срочного торможения и контролирует пропорциональный электромагнитный клапан непосредственно от пневматической коробки педали. Достигается обеспечение постепенного и умеренного торможения, а также уменьшение времени срабатывания тормозной системы. 24 з.п. ф-лы, 8 ил.
Формула
ручной орган (13) двухступенчатого действия в соответствии с рабочим режимом и режимом быстрого торможения, который приводится в действие водителем для начала процесса торможения, и положение которого определяет интенсивность затребованного торможения;
пропорциональный электромагнитный клапан (9) для каждого тормозного модуля (6), который при воздействии на ручной орган (13) воспринимает электрическую и/или пневматическую команду торможения, и открытие которого, пропорциональное полученной команде (командам), устанавливает связь между исполнительными органами торможения (7) и питающим баком (8), производя усилие торможения;
по крайней мере, один блок управления замедлением (12), который при воздействии на ручной орган (13) получает информацию о положении этого органа и, исходя из этого положения, производит электрическую команду торможения, предназначенную для электрического управления открытием пропорциональных электромагнитных клапанов (9);
линия электрического управления (11) для каждого тормозного модуля (6), образующая электрическую связь между блоком управления замедлением (12) и каждым из пропорциональных электромагнитных клапанов (9) и обеспечивающая передачу электрической команды;
линия пневматического управления (10), образующая пневматическую связь между ручным органом (13) и пропорциональными электромагнитными клапанами (9) и обеспечивающая передачу пневматической команды, производимой ручным органом (13), только в режиме быстрого торможения.
приемную ступень (23), образующую входную ступень блока управления замедлением и получающую информацию о положении ручного органа (13);
микропроцессор обратной связи (21), который рассчитывает посылаемую электрическую команду торможения;
контрольный микропроцессор (22), который контролирует микропроцессор обратной связи (21); и,
по крайней мере, одну выходную ступень (26), которая содержит регулятор тока (28), производящий рассчитанную электрическую команду и посылающий ее на линию электрического управления (11).
Комментарии